
Comparison and Improvement of Bioinspired Mobile Algorithms to Trace the Emission Source Based on the Simulation Scenarios




Abstract
:
1. Introduction
2. Simulation Model
3. Performance of Source-Tracing Algorithms
3.1. Field Simulations Using Designated Tracing Strategies
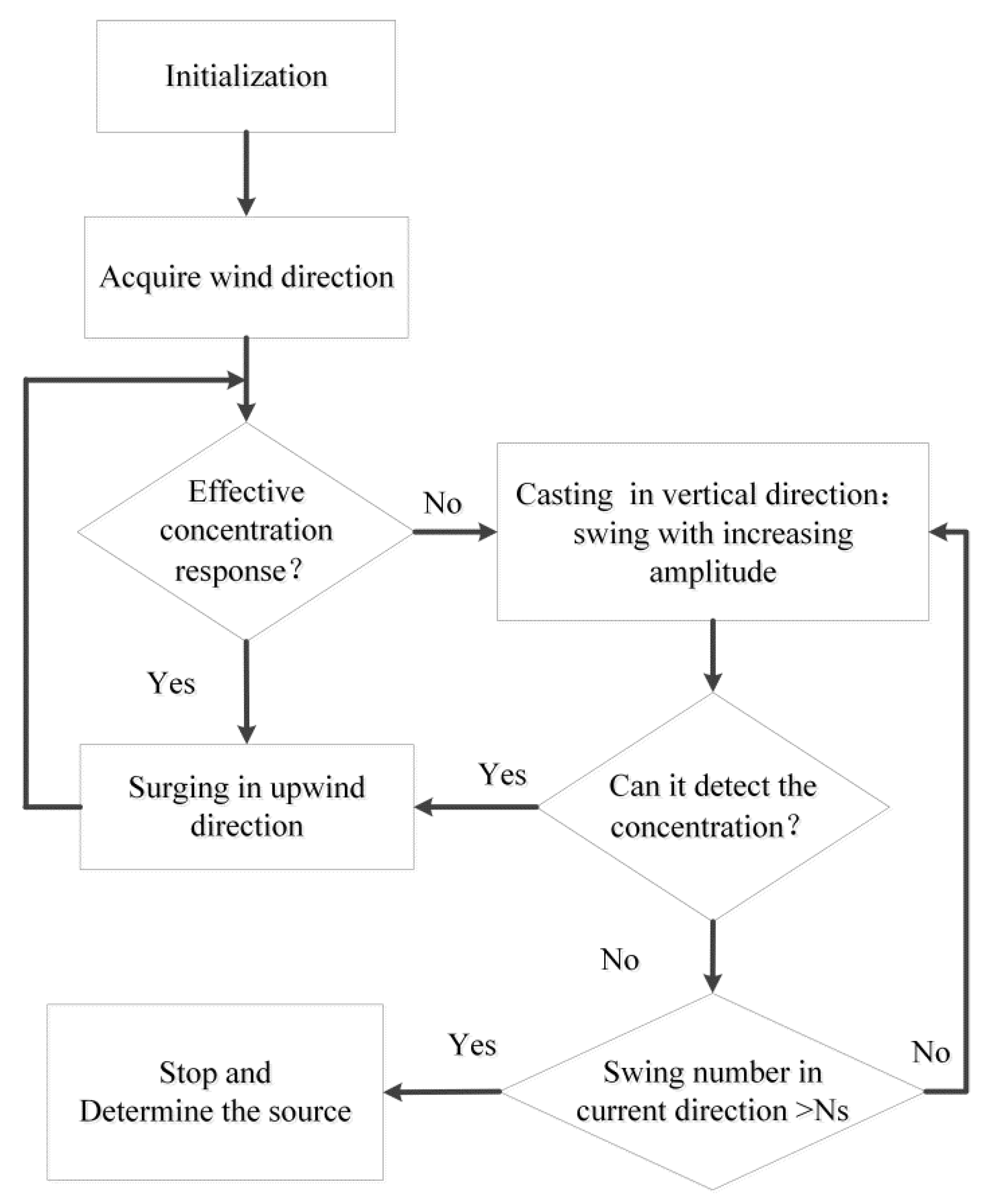
3.1.1. Silkworm Algorithm
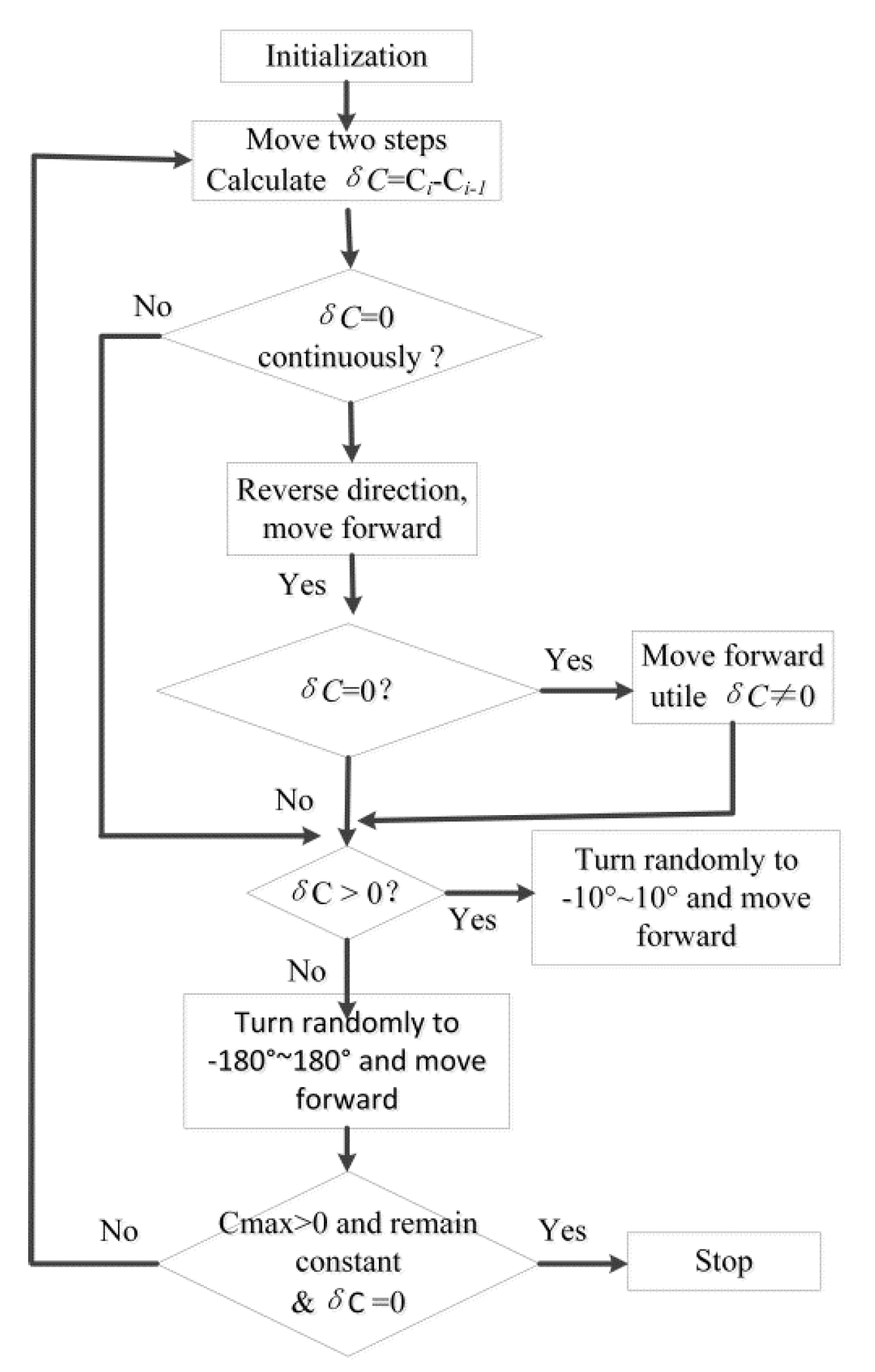
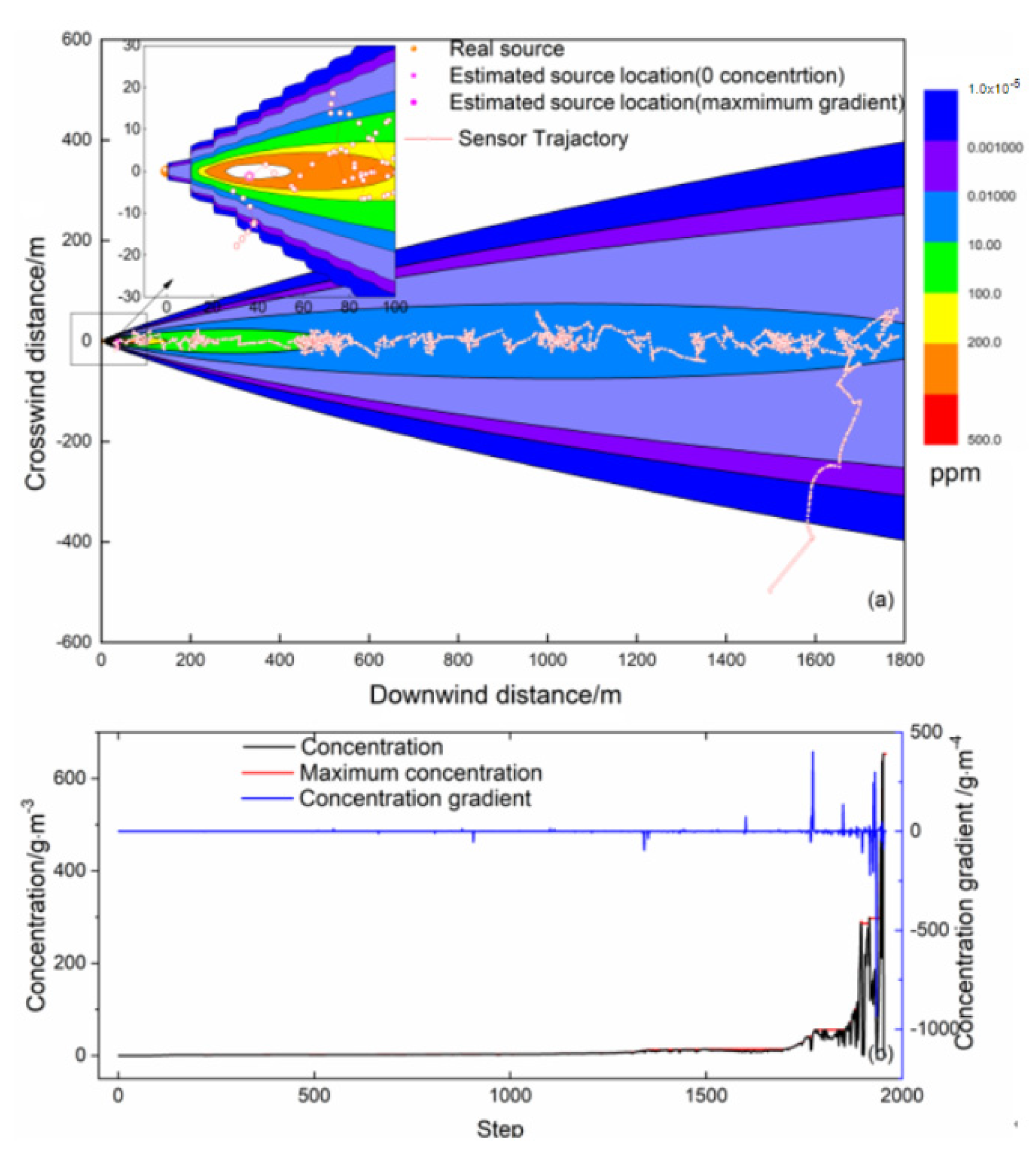
3.1.2. E. coli Algorithm
3.1.3. Step-by-Step Algorithm
3.2. Performance Comparisons of the Designated Algorithms
4. Improvement of Bioinspired Algorithms
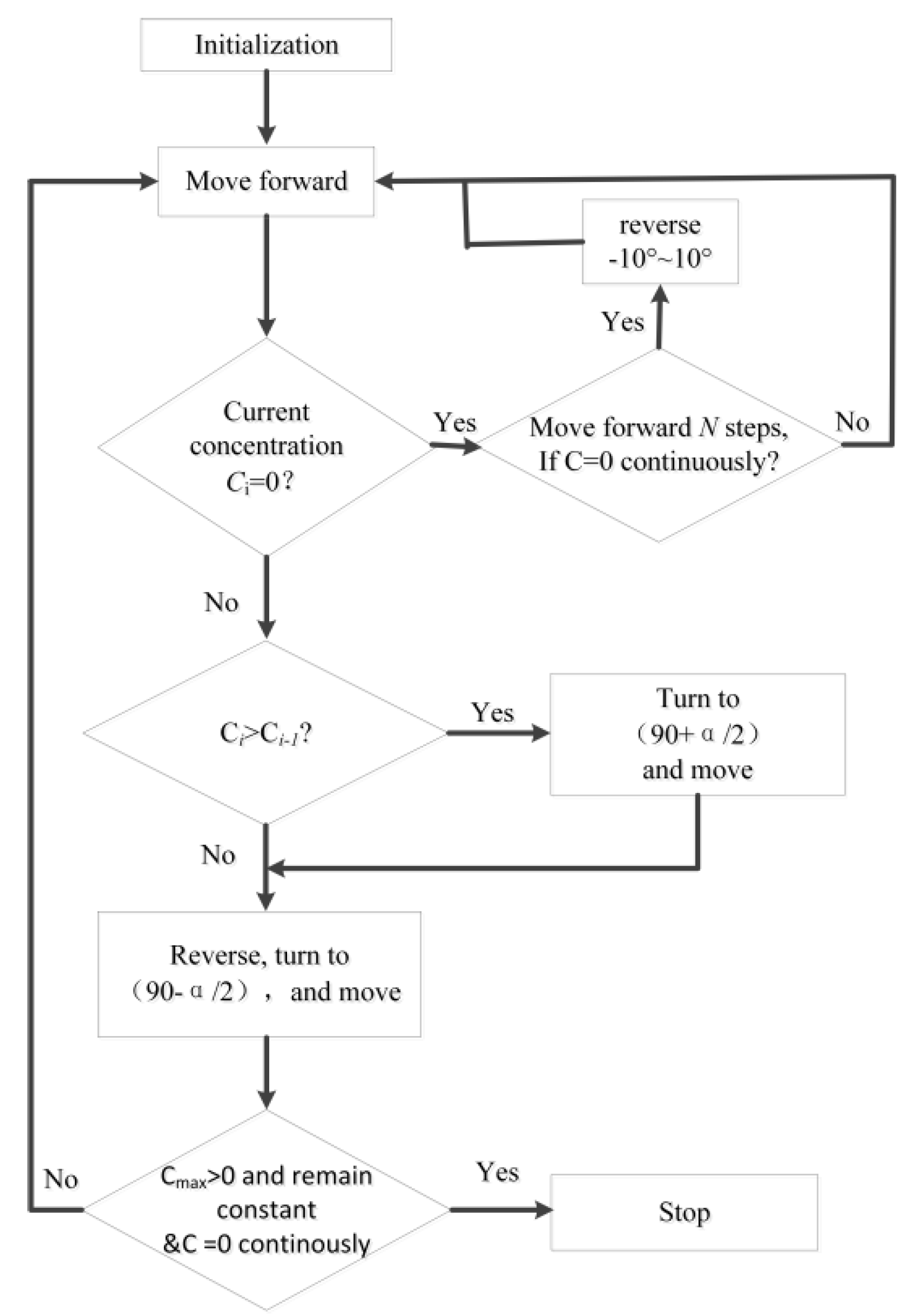
4.1. Tracking Strategy Inspired by the Behavior of Female Mosquitoes
4.2. Source Tracing with the RMIG Algorithm
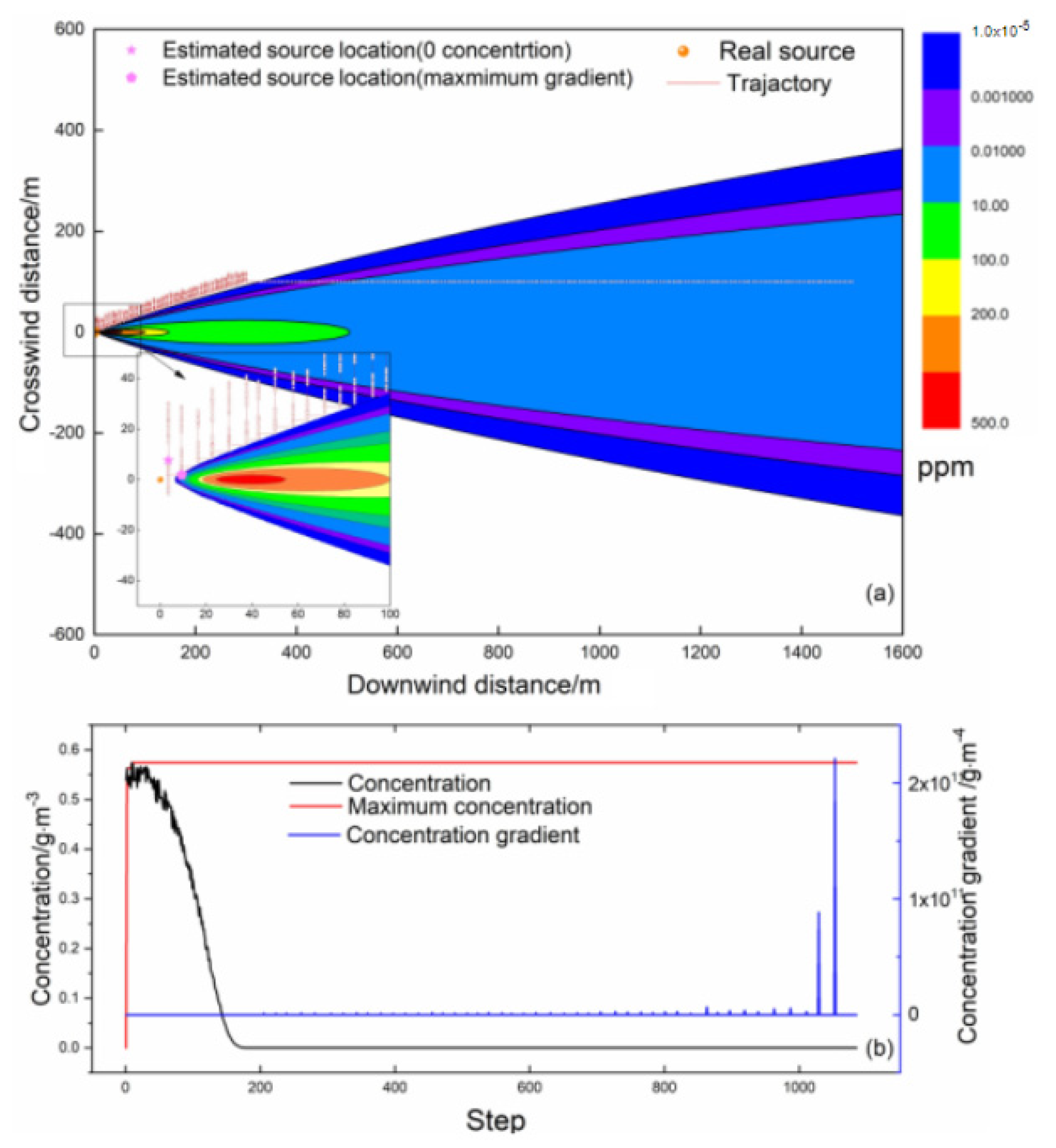
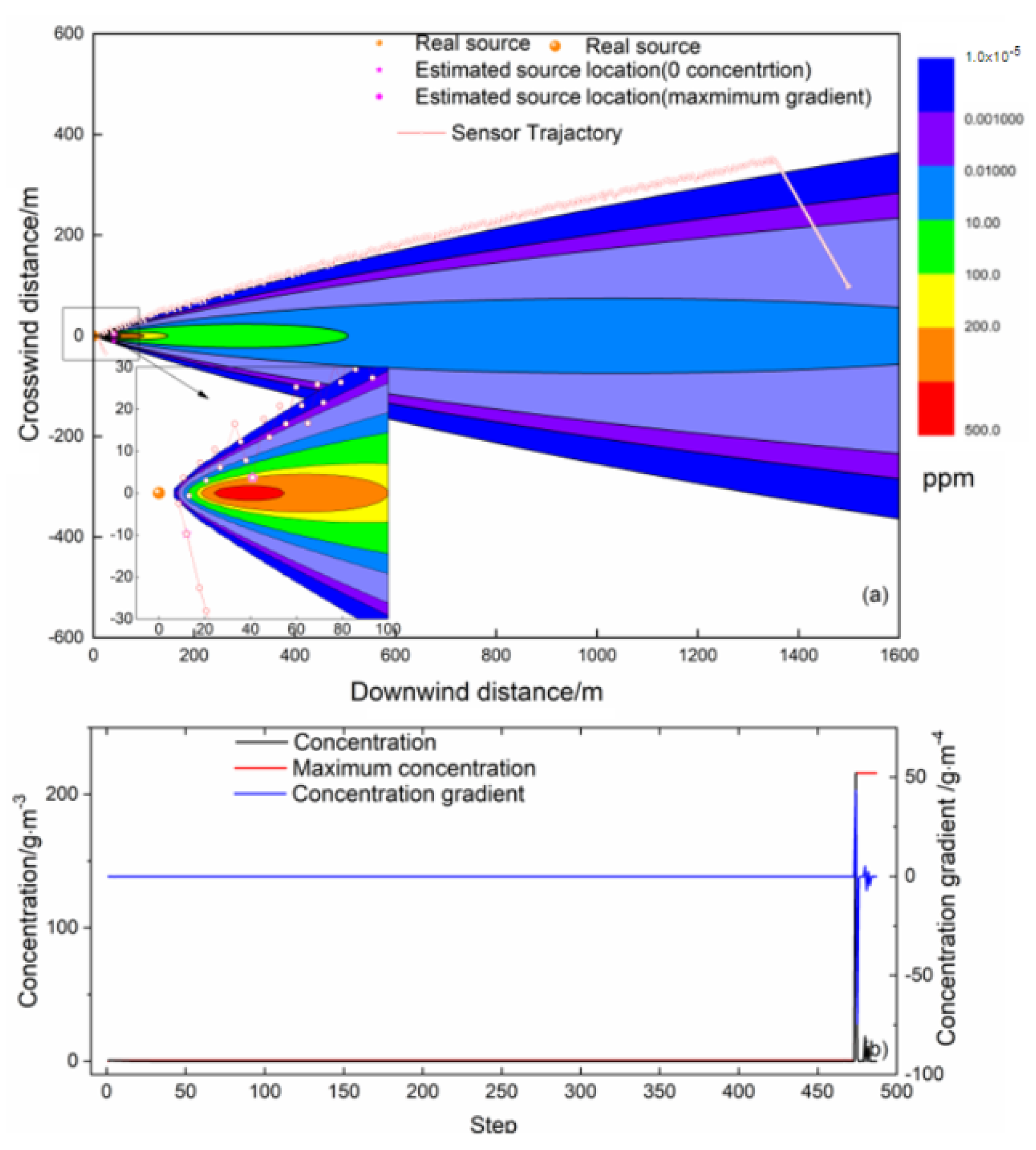
4.2.1. Scenario I: The Mobile Sensor Initializing from Inside the Plume
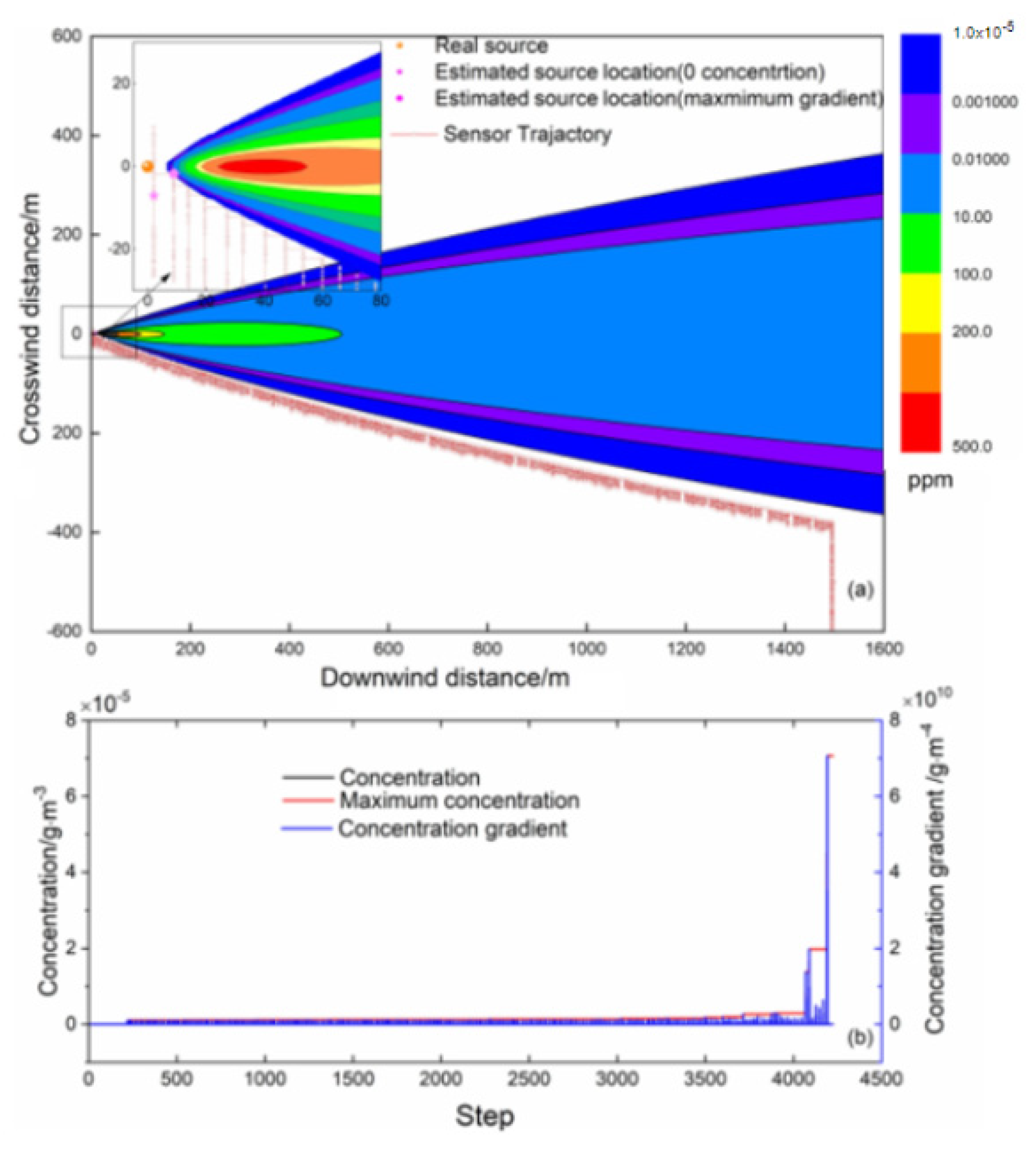
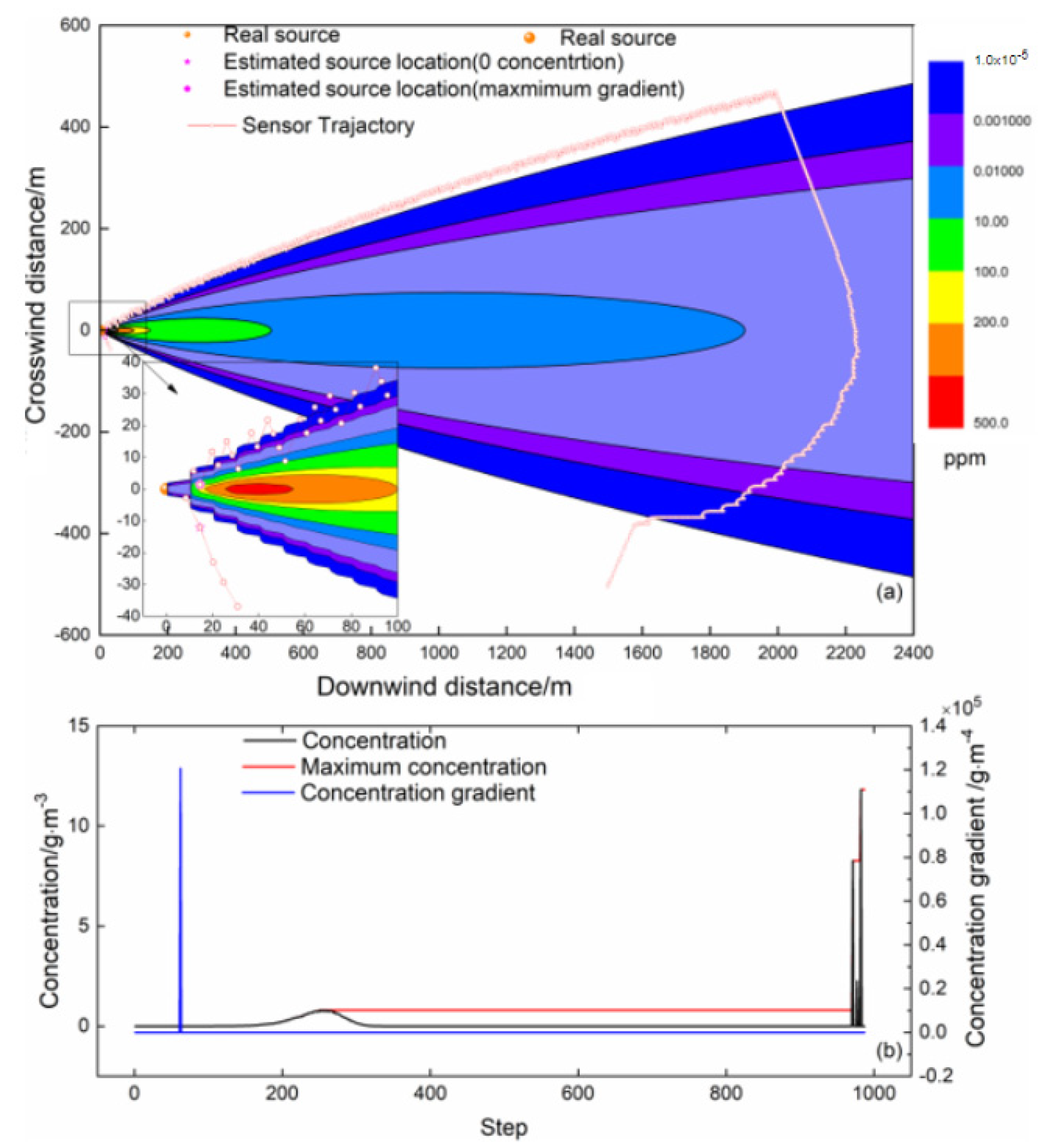
4.2.2. Scenario II: Mobile Sensor Initializing from Outside the Plume
4.3. Acceleration Strategy for Source Tracing with RMIG
4.4. Improvement in Source Determination
5. Conclusions
- (1)
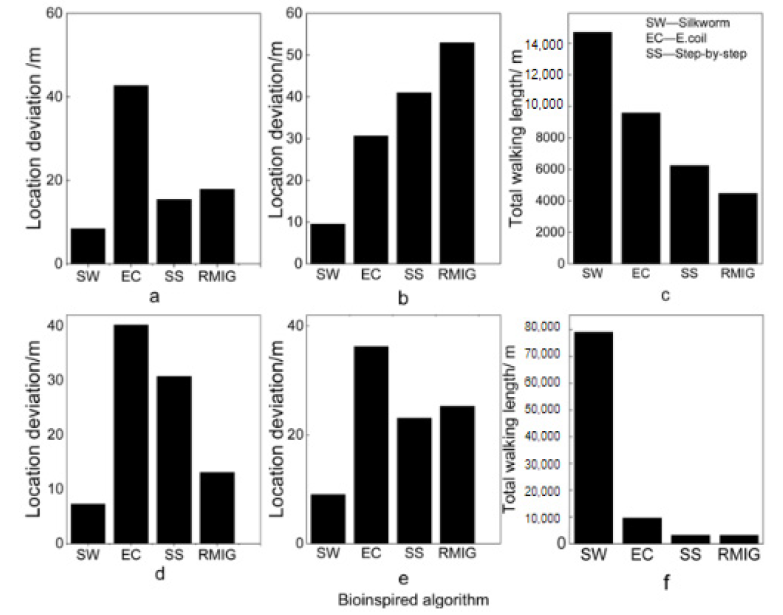
- For different algorithms, the efficiency and accuracy of source tracking are various. The step-by-step algorithm has the highest search efficiency, while the silkworm algorithm has the highest positioning accuracy. However, during the entire search, the mobile sensor traveled with the furthest distance. The E. coli algorithm mainly depends on the concentration gradient between every two steps.
- (2)
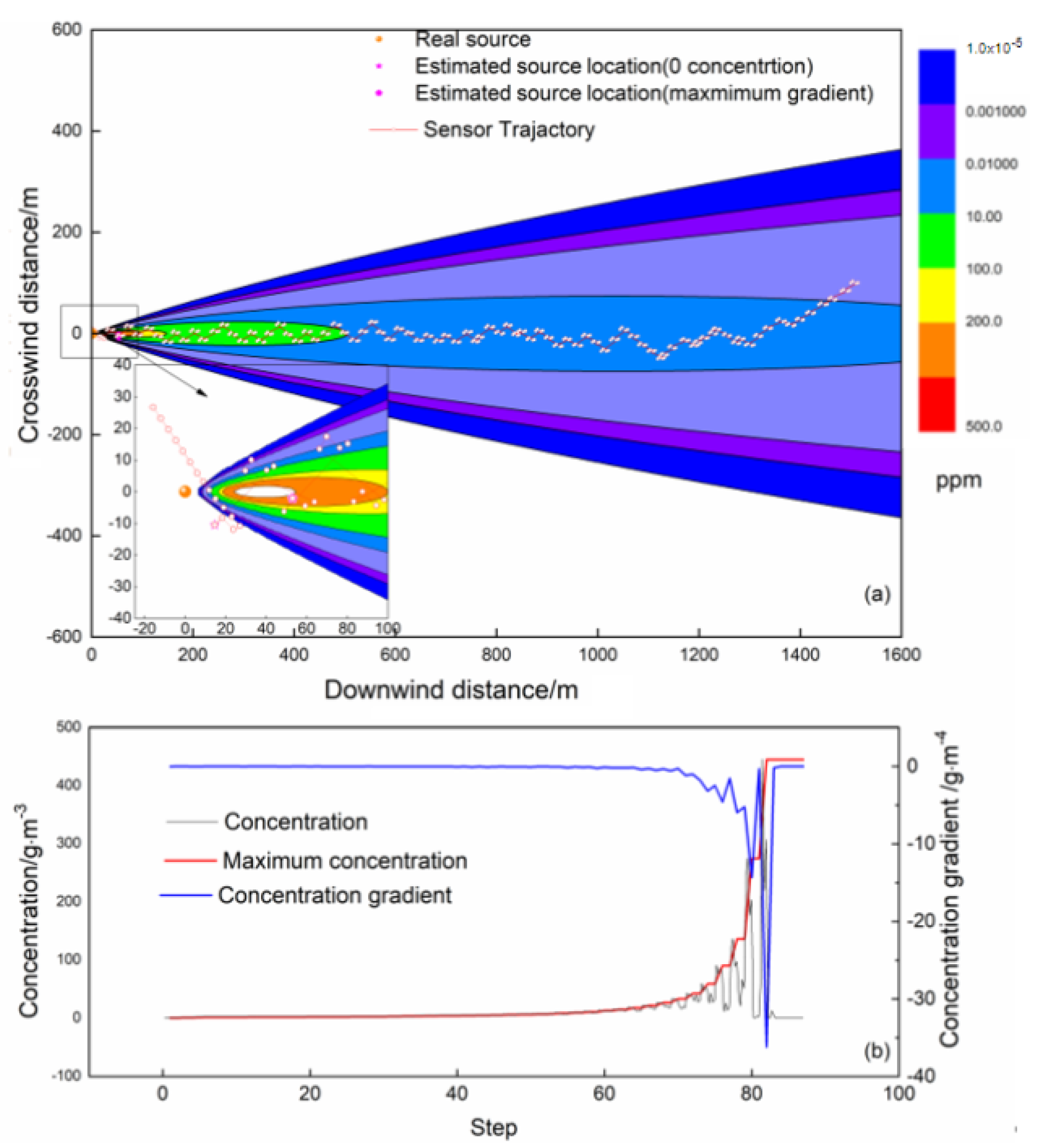
- The concentration and gradient characteristics in the source tracking process vary with biomimetic algorithms. The maximum concentration does not always occur at the end of the tracing process, and a change in zero concentration can also be used to terminate the search. However, neither is unique in the tracking process; therefore, source determination should be further improved.
- (3)
- According to the behavior of female mosquitoes in finding hosts by tracking CO2 plumes, a new tracking strategy is proposed. With this algorithm, the mobile sensor is driven by inverse motion and the interface gradient (RMIG). The simulation results show that, compared with the E. coli algorithm that is driven by the linear gradient between two steps, the tracking efficiency and localization accuracy of the RMIG algorithm are greatly improved.
- (4)
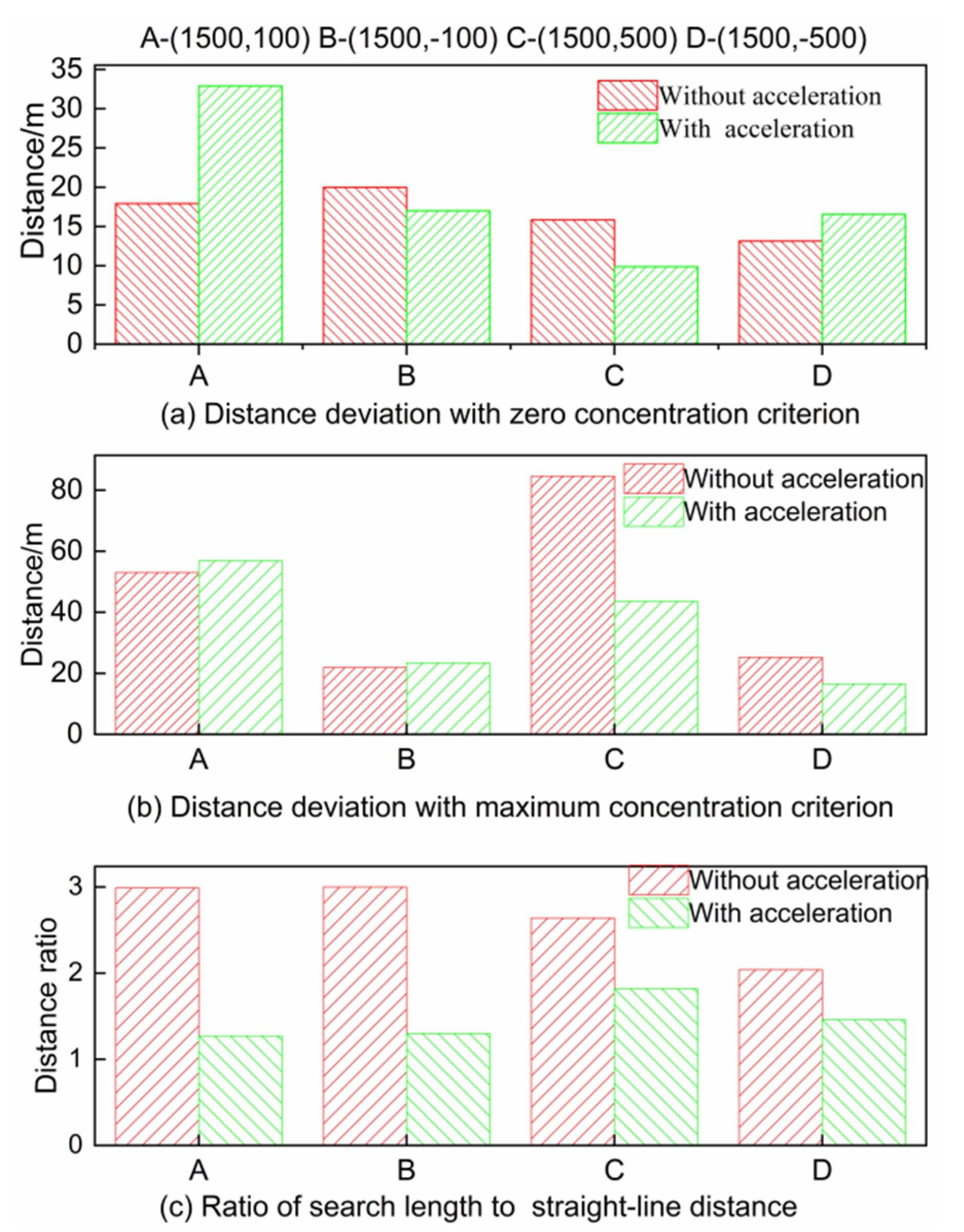
- In the simulation scenarios, the acceleration strategy of the RMIG algorithm can improve the search efficiency of a mobile sensor by 40–100%.
- (5)
- The source location determined by the RMIG-OCMCD method is close to the real source, and the location estimation accuracy is much higher than that of the zero-concentration and maximum-concentration standards.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ma, D.L.; Gao, J.M.; Zhang, Z.X.; Zhao, H.; Wang, Q.S. Locating the gas leakage source in the atmosphere using the dispersion wave method. J. Loss Prev. Process Ind. 2020, 63, 104031. [Google Scholar] [CrossRef]
- Kowadlo, G.; Russell, R.A. Robot odor localization: A taxonomy and survey. Int. J. Robot. Res. 2008, 27, 869–894. [Google Scholar] [CrossRef]
- Hutchinson, M.; Oh, H.; Chen, W.H. A review of source term estimation methods for atmospheric dispersion events using static or mobile sensors. Inf. Fusion 2017, 36, 130–148. [Google Scholar] [CrossRef] [Green Version]
- Haupt, S.E. A demonstration of coupled receptor/dispersion modeling with a genetic algorithm. Atmos. Environ. 2005, 39, 7181–7189. [Google Scholar] [CrossRef]
- Ma, D.L.; Deng, J.Q.; Zhang, Z.X. Comparison and improvements of optimization methods for gas emission source identification. Atmos. Environ. 2013, 81, 188–198. [Google Scholar] [CrossRef]
- Hazart, A.; Giovannelli, J.F.; Dubost, S.; Chatellier, L. Inverse transport problem of estimating point-like source usinga Bayesian parametric method with MCMC. Signal Process. 2014, 96 Pt B, 346–361. [Google Scholar] [CrossRef]
- Kopka, P.; Wawrzynczak, A.; Borysiewicz, M. Application of the approximate bayesian computation methods in the stochastic estimation of atmospheric contamination parameters for mobile sources. Atmos. Environ. 2016, 145, 201–212. [Google Scholar] [CrossRef]
- Ma, D.L.; Wang, S.M.; Zhang, Z.X. Hybrid algorithm of minimum relative entropy-particle swarm optimization with regularization parameters for gas source term identification. Atmos. Environ. 2014, 94, 637–640. [Google Scholar] [CrossRef]
- Ma, D.L.; Tan, W.; Zhang, Z.X.; Hu, J. Parameter identification for continuous point emission source based on Tikhonov regularization method coupled with particle swarm optimization algorithm. J. Hazard. Mater. 2017, 325, 239–250. [Google Scholar] [CrossRef]
- Ma, D.L.; Tan, W.; Zhang, Z.X.; Hu, J. Gas emission source term estimation with 1-step nonlinear partial swarm optimization–Tikhonov regularization hybrid method. Chin. J. Chem. Eng. 2018, 6, 356–363. [Google Scholar] [CrossRef]
- Flesch, T.K.; Wilson, J.D.; Harper, L.A. Deducing ground-to-air emissions from observed trace gas concentrations: A field trial with wind disturbance. J. Appl. Meteorol. Climatol. 2005, 44, 475–484. [Google Scholar] [CrossRef]
- Lilienthal, A.; Reimann, D.; Zell, A. Gas source tracing with a mobile robot using an adapted moth strategy. In Autonome Mobile Systeme; Dillmann, R., Wörn, H., Gockel, T., Eds.; Informatik Aktuell; Springer: Berlin/Heidelberg, Germany, 2003; pp. 150–160. [Google Scholar]
- Russell, R.A. Tracking chemical plumes in 3-dimensions. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006. [Google Scholar]
- Russell, R.A. Locating underground chemical sources by tracking chemical gradients in 3 dimensions. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004. [Google Scholar]
- Ishida, H.; Kagawa, Y.; Nakamoto, T.; Moriizumi, T. Odor-source localization in the clean room by an autonomous mobile sensing system. Sens. Actuator B Chem. 1996, 33, 115–121. [Google Scholar] [CrossRef]
- Zarzhitsky, D.; Spears, D.F.; Spears, W.M.; Thayer, D.R. A fluid dynamics approach to multi-robot chemical plume tracing. In Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems, New York, NY, USA, 23–23 July 2004. [Google Scholar]
- Li, J.G.; Meng, Q.H.; Wang, Y. Odor source localization using a mobile robot in outdoor airflow environments with a particle filter algorithm. Auton. Robot. 2011, 30, 281–292. [Google Scholar] [CrossRef]
- Ristic, B.; Skvortsov, A.; Gunatilaka, A. A study of cognitive strategies for an autonomous search. Inf. Fusion 2016, 28, 1–9. [Google Scholar] [CrossRef]
- Hutchinson, M.; Oh, H.; Chen, W.H. Entrotaxis as a strategy for autonomous search and source reconstruction in turbulent conditions. Inf. Fusion 2018, 42, 179–189. [Google Scholar] [CrossRef] [Green Version]
- Farrell, J.A.; Pang, S.; Li, W.; Arrieta, R. Chemical plume tracing experimental results with a REMUS AUV. In Proceedings of the IEEE OCEANS 2003, San Diego, CA, USA, 22–26 September 2003. [Google Scholar]
- Pang, S.; Farrell, J.A. Chemical plume source localization. IEEE Trans. Syst. Man Cybern. Part B 2006, 36, 1068–1080. [Google Scholar] [CrossRef]
- Kowadlo, G.; Russell, R.A. Improving the robustness of Naive Physics airflow mapping, using Bayesian reasoning on a multiple hypothesis tree. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006. [Google Scholar]
- Zhao, Y.; Chen, B.; Zhu, Z.Q.; Chen, F.R.; Wang, Y.D.; Ma, D.L. Entrotaxis-Jump as a hybrid search algorithm for seeking an unknown emission source in a large-scale area with road network constraint. Expert Syst. Appl. 2020, 157, 113484. [Google Scholar] [CrossRef]
- Cui, X.H.; Tim, H.; Ragade, R.K.; Elmaghraby, A.S. A Swarm Approach for Emission Sources Localization. In Proceedings of the 16th IEEE International Conference on Tools with Artificial Intelligence (ICTAI 2004), Boca Raton, FL, USA, 15–17 November 2004. [Google Scholar]
- Yeon, A.S.A.; Visvanathan, R.; Mamduh, S.M.; Kamarudin, K.; Kamarudin, L.M.; Zakaria, A. Implementation of Behaviour Based Robot with Sense of Smell and Sight. Procedia Comput. Sci. 2015, 76, 119–125. [Google Scholar] [CrossRef] [Green Version]
- Barad, M.L. Project Prairie Grass: A Field Program in Diffusion. Geophysical Research Paper; Tech. Rep. AFCRC-TR-58-235(I); Air Force Cambridge Res. Center, Wright-Patterson Air Force Base: Hanscom, MA, USA, 1958. [Google Scholar]
- Hanna, S.R.; Briggs, G.A.; Hosker, R.P. Handbook on Atmospheric Diffusion; U.S. Department of Energy, Technical Information Center: Oak Ridge, TN, USA, 1982. [Google Scholar]
- Pasquill, F.; Smith, F.B. Atmospheric Diffusion, 3rd ed.; Ellis Horwood Limited: Chichester, UK, 1983. [Google Scholar]
- Ma, D.; Gao, J.; Zhang, Z.; Zhao, H. Gas recognition method based on the deep learning model of sensor array response map. Sens. Actuators B. Chem. 2021, 330, 129349. [Google Scholar] [CrossRef]
- Dekker, T.; Cardé, R.T. Moment-to-moment flight manoeuvres of the female yellow fever mosquito (Aedesaegypti L.) in response to plumes of carbon dioxide and human skin odour. J. Exp. Med. 2011, 214, 3480–3494. [Google Scholar]
- Breugel, F.; Riffell, J.; Fairhall, A.; Dickinson, M.H. Mosquitoes use vision to associate odor plumes with thermal targets. Curr. Biol. 2015, 25, 2123–2129. [Google Scholar] [PubMed] [Green Version]
- Ma, D.L.; Tan, W.; Wang, Q.S.; Zhang, Z.X.; Gao, J.M.; Zeng, Q.F.; Wang, X.Q.; Xia, F.S.; Shi, X.G. Application and improvement of swarm intelligence optimization algorithm in gas emission source identification in atmosphere. J. Loss Prev. Process Ind. 2018, 56, 262–271. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Situation | Algorithms | Zero-Concentration Criterion | Maximum-Concentration/Gradient Criterion | Dl | Dl/D0 | ||||
|---|---|---|---|---|---|---|---|---|---|
| x | y | Ed1 | x | Y | Ed2 | ||||
| Start inside the plume | Silkworm | 3.54 | 7.65 | 8.43 | 9.37 | 1.84 | 9.55 | 14,700 | 9.78 |
| E. coli | 41.05 | −11.93 | 42.75 | 30.67 | −0.24 | 30.67 | 9580 | 6.37 | |
| Step-by-step | 12.06 | −9.71 | 15.48 | 40.84 | 3.68 | 41.00 | 6240 | 4.15 | |
| Start outside the plume | Silkworm | 2.07 | −7.02 | 7.32 | 8.9 | −1.71 | 9.06 | 79,100 | 50.03 |
| E. coli | 38.17 | −12.68 | 40.22 | 36.23 | −1.16 | 36.25 | 9660 | 6.111 | |
| Step-by-step | 20.36 | −23.05 | 30.75 | 19.85 | 11.79 | 23.08 | 3270 | 2.07 | |
| Starting Point | Zero-Concentration Criterion | Maximum-Concentration Criterion | Dl | D0 | Dl/D0 | ||||
|---|---|---|---|---|---|---|---|---|---|
| x | y | Ed | X | Y | Ed | ||||
| 1500, 100 | 32.76 | −3.15 | 32.91 | 56.76 | −3.14 | 56.84 | 1910 | 1503.32 | 1.27 |
| 1500, −100 | 5.07 | 16.24 | 17.01 | 23.41 | −0.75 | 23.42 | 1950 | 1503.32 | 1.30 |
| 1500, 500 | 9.55 | 2.51 | 9.87 | 43.55 | 2.51 | 43.62 | 2878 | 1581.13 | 1.82 |
| 1500, −500 | 60.68 | −14.21 | 62.32 | 60.68 | 14.21 | 62.32 | 2015 | 1581.13 | 1.27 |
| Starting Position | Zero-Concentration Criterion | Maximum-Concentration Criterion | OCMCD | ||||||
|---|---|---|---|---|---|---|---|---|---|
| x | y | Ed | X | Y | Ed | X | y | Ed | |
| 1500, 100 | 64.32 | 20.34 | 67.46 | 69.99 | 268.33 | 277.313 | −0.03 | 0.05 | 0.06 |
| 1500, −100 | 38.61 | −8.45 | 39.52 | 331.35 | −25.93 | 332.36 | 3.75 | −0.41 | 3.77 |
| 1500, 500 | 30.91 | 4.75 | 31.27 | 72.91 | 4.75 | 73.06 | 1.62 | 0.11 | 1.62 |
| 1500, −500 | 16.73 | 4.41 | 17.30 | 22.93 | −1.13 | 22.96 | 0.8 | 0.12 | 0.81 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, D.; Xie, G.; Mao, W.; Gao, J.; Yi, H.; Li, D. Comparison and Improvement of Bioinspired Mobile Algorithms to Trace the Emission Source Based on the Simulation Scenarios. Atmosphere 2022, 13, 661. https://doi.org/10.3390/atmos13050661
Ma D, Xie G, Mao W, Gao J, Yi H, Li D. Comparison and Improvement of Bioinspired Mobile Algorithms to Trace the Emission Source Based on the Simulation Scenarios. Atmosphere. 2022; 13(5):661. https://doi.org/10.3390/atmos13050661
Chicago/Turabian StyleMa, Denglong, Guofang Xie, Weigao Mao, Jianmin Gao, Hang Yi, and Dangchao Li. 2022. "Comparison and Improvement of Bioinspired Mobile Algorithms to Trace the Emission Source Based on the Simulation Scenarios" Atmosphere 13, no. 5: 661. https://doi.org/10.3390/atmos13050661
APA StyleMa, D., Xie, G., Mao, W., Gao, J., Yi, H., & Li, D. (2022). Comparison and Improvement of Bioinspired Mobile Algorithms to Trace the Emission Source Based on the Simulation Scenarios. Atmosphere, 13(5), 661. https://doi.org/10.3390/atmos13050661