
Ionosphere Tomographic Model Based on Neural Network with Balance Cost and Dynamic Correction Using Multi-Constraints



Abstract
1. Introduction
2. The BCDC Model
2.1. Corrections Using Vertical Constraints
2.2. Correction Using a Horizontal Constraint
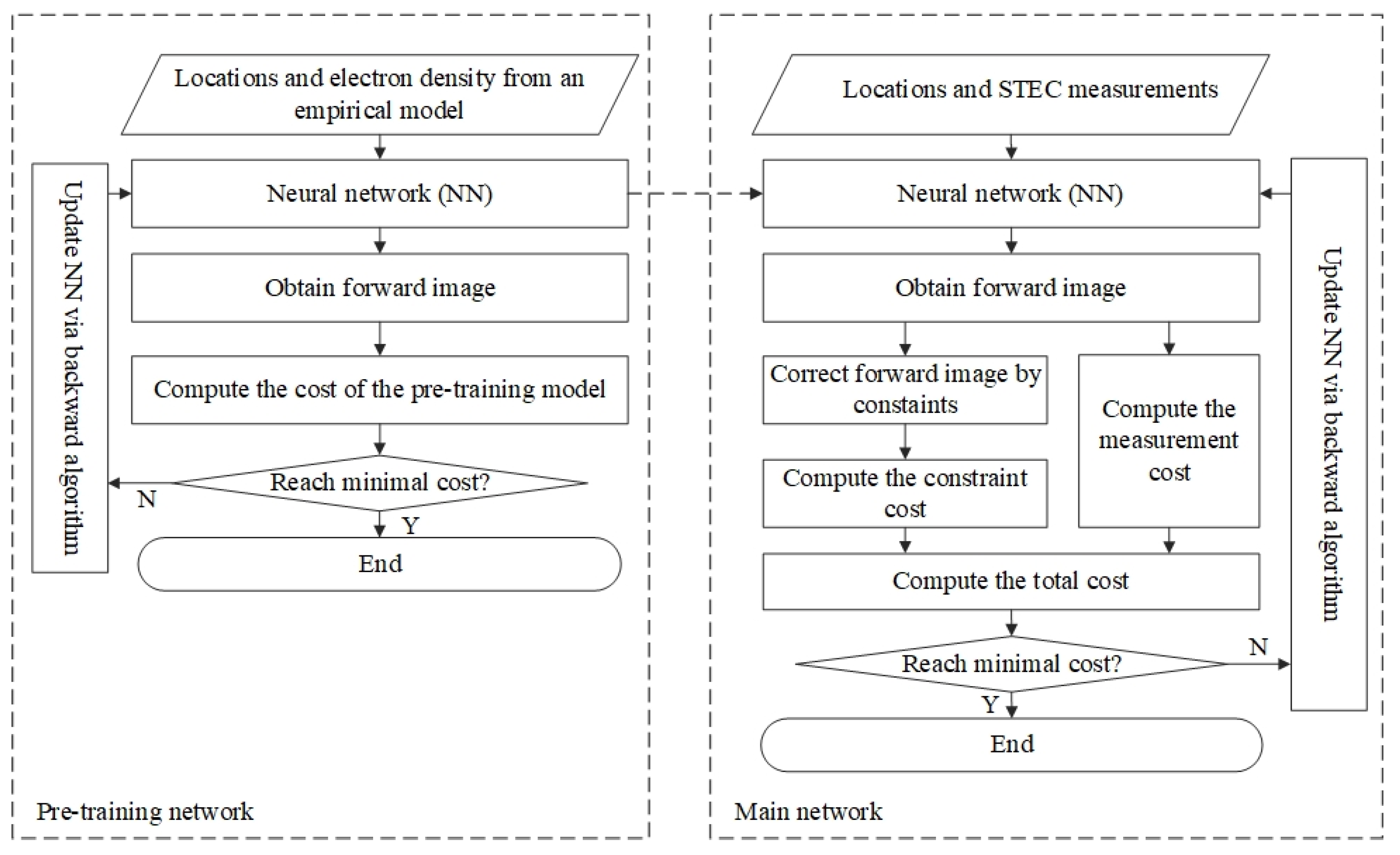
2.3. Pre-Training Process
3. Validations and Comparisons
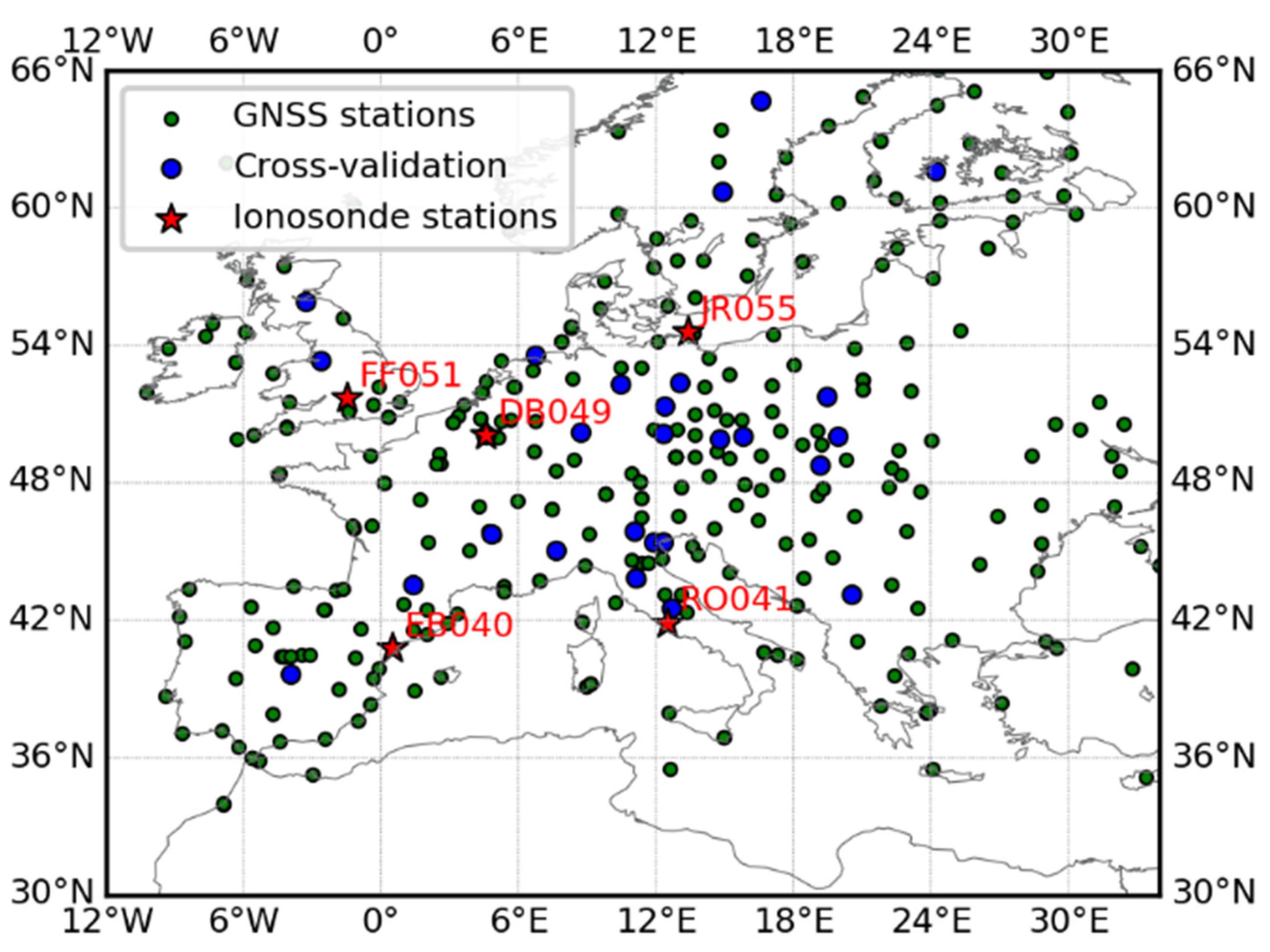
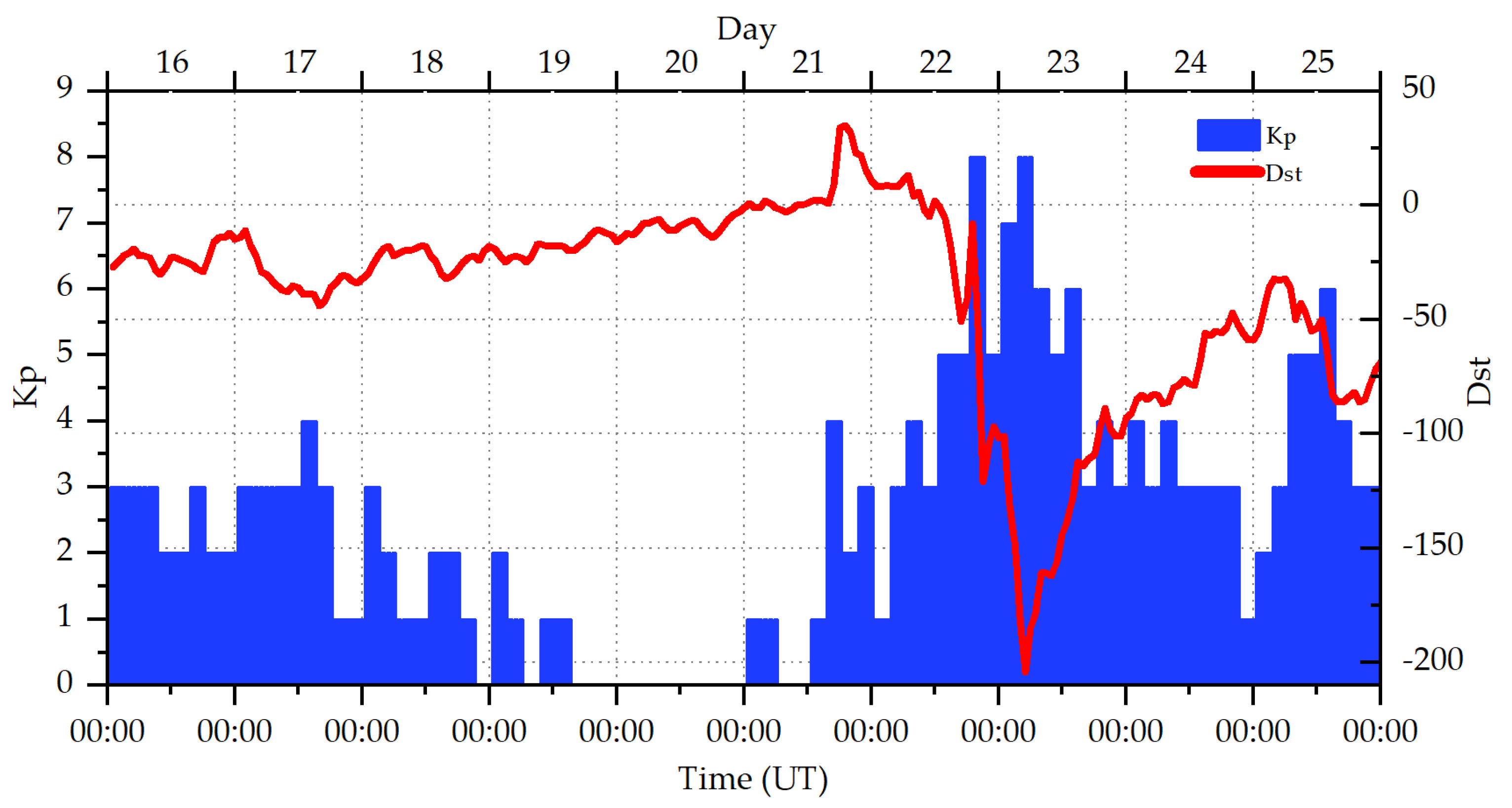
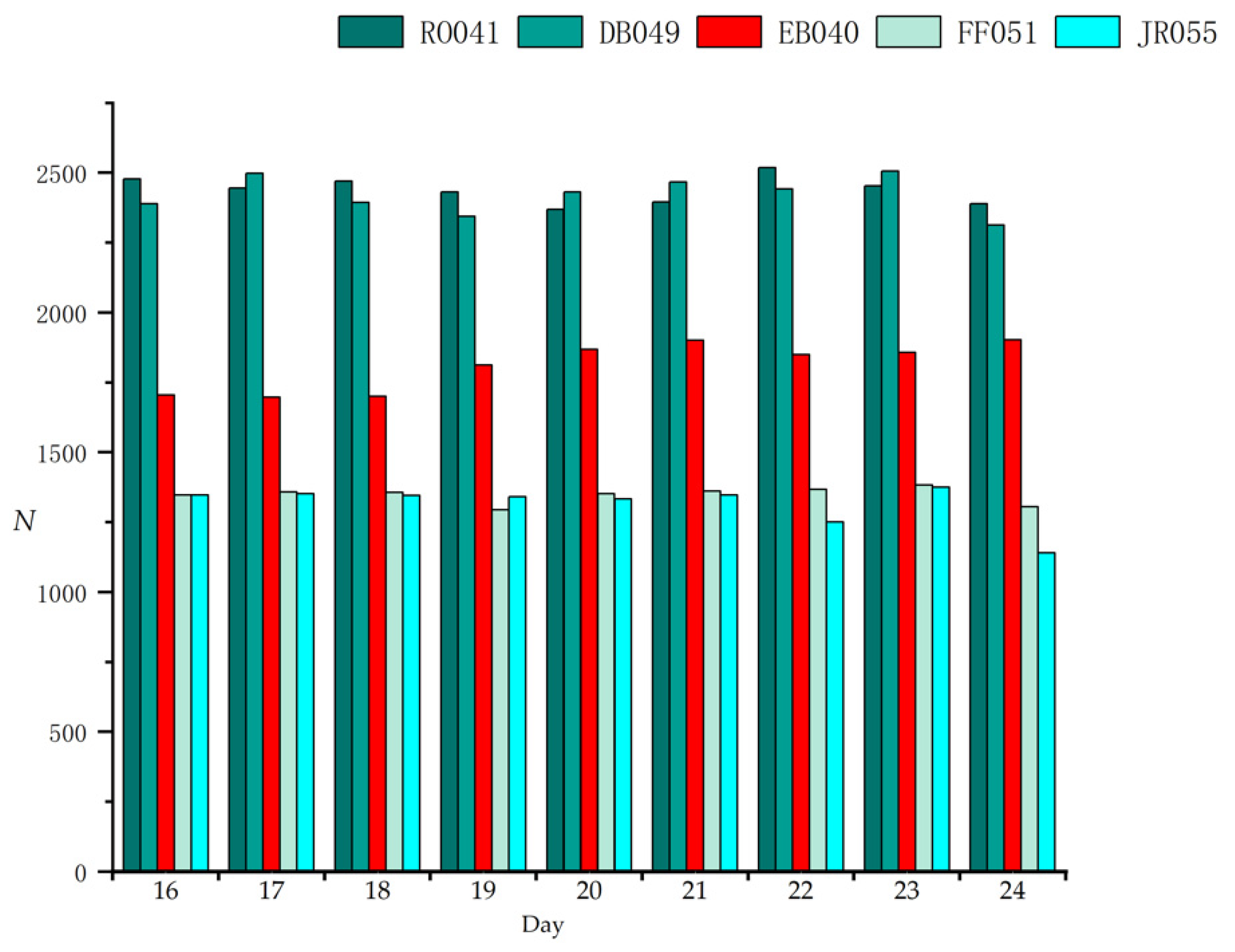
3.1. Data and Method
3.2. Results
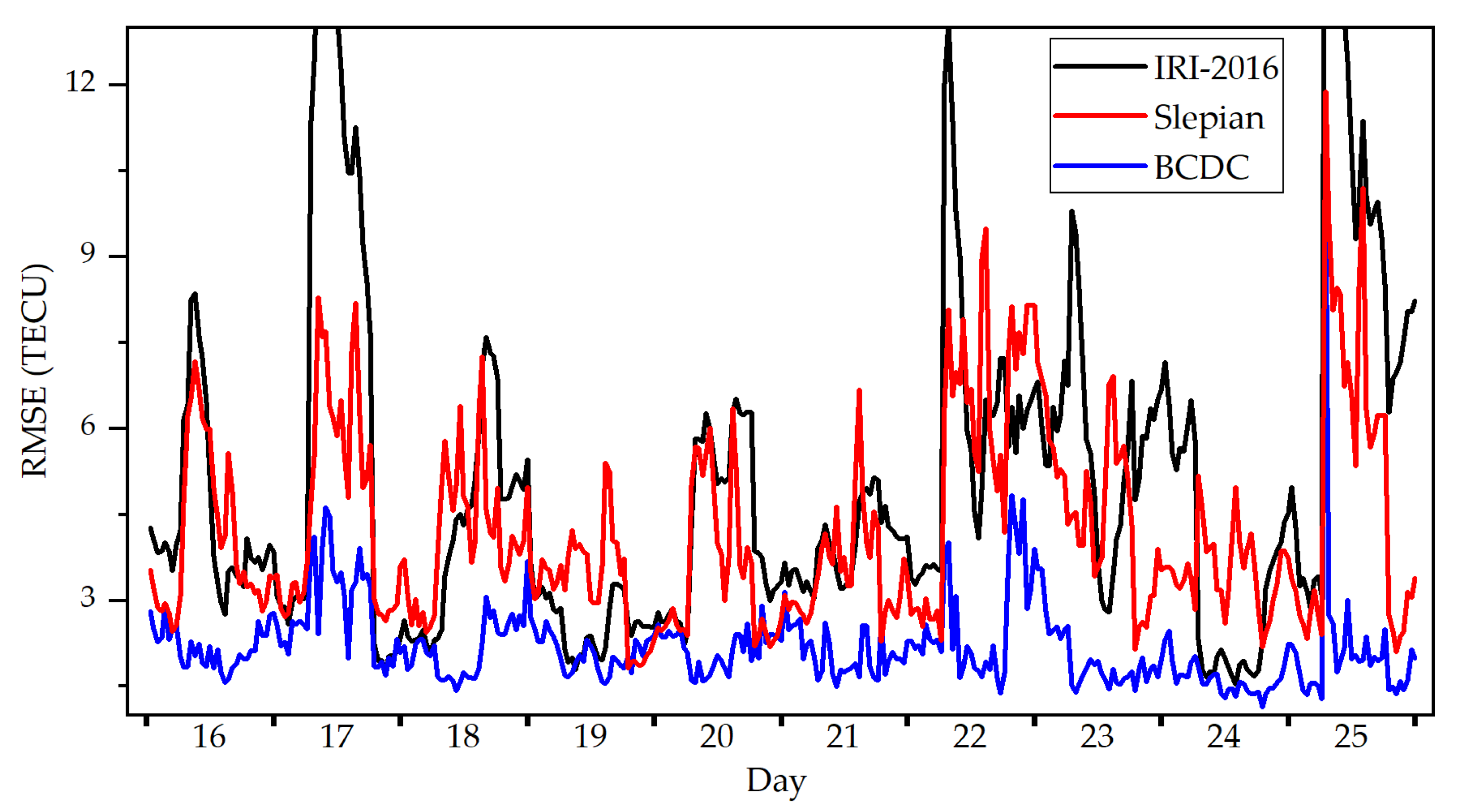
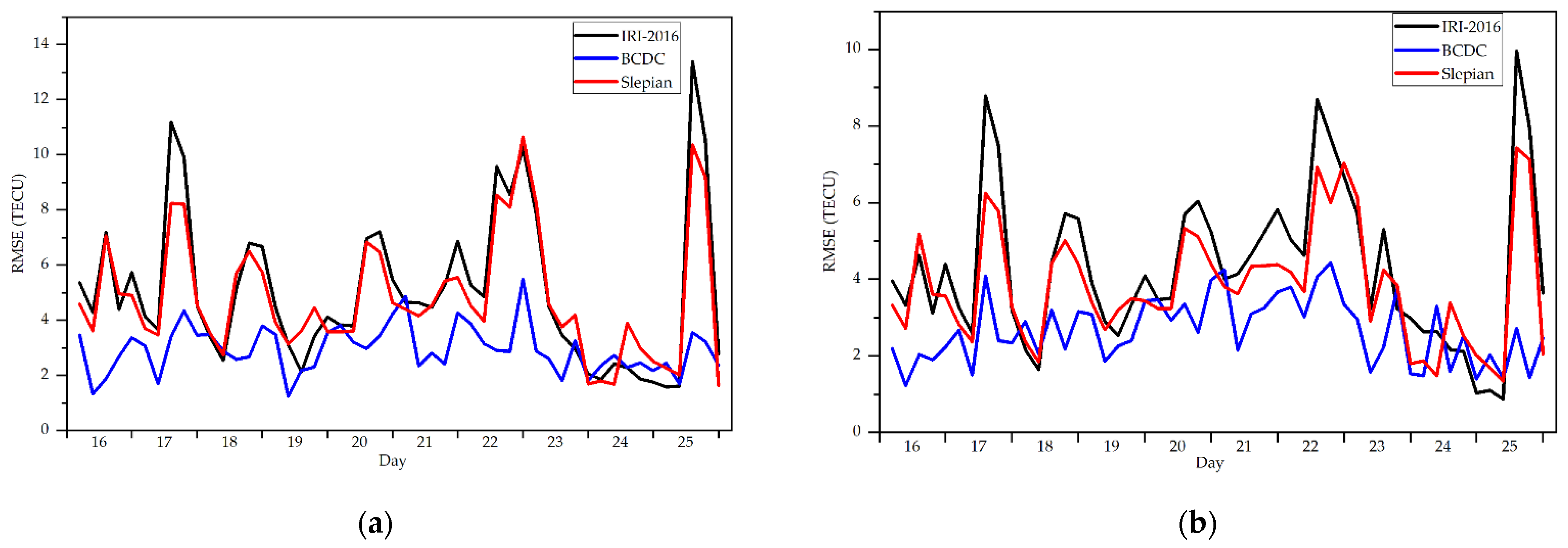
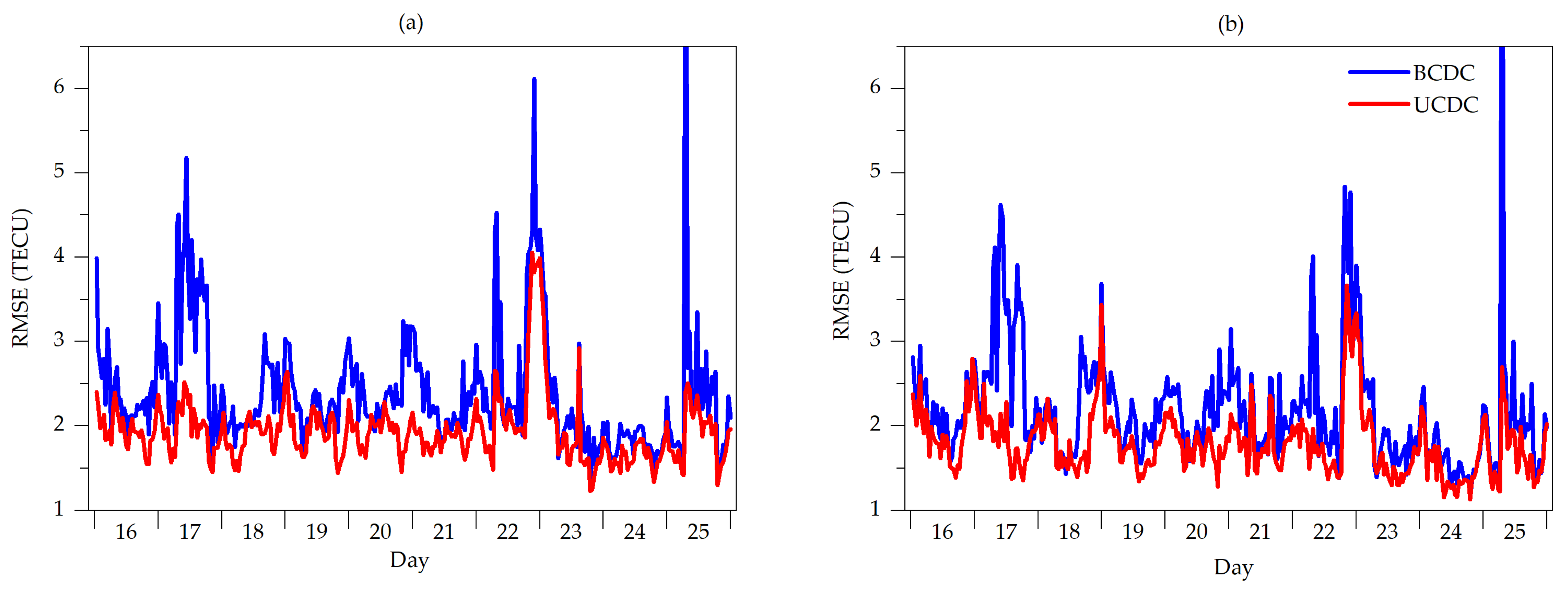
3.2.1. STEC Cross-Validations
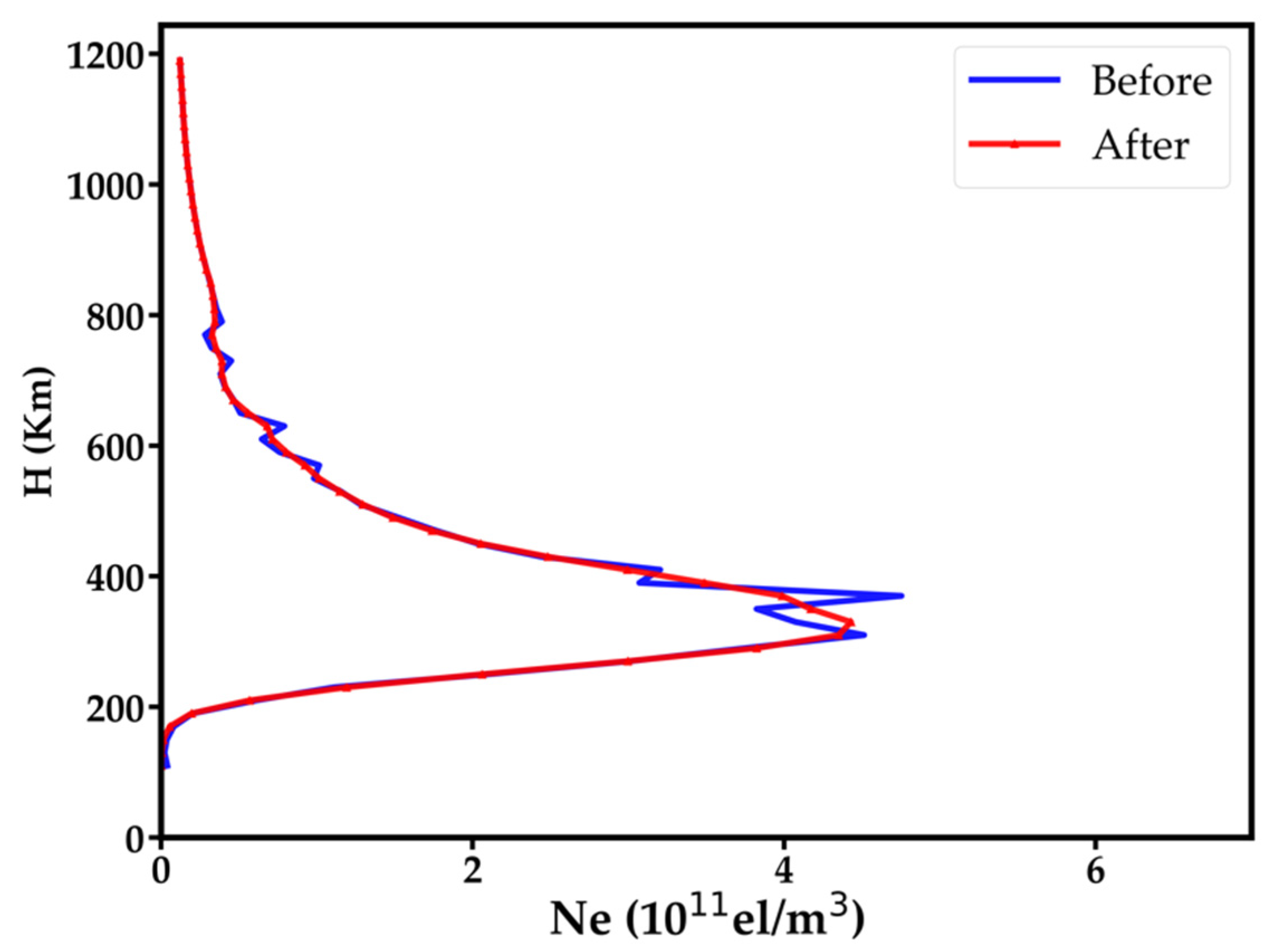
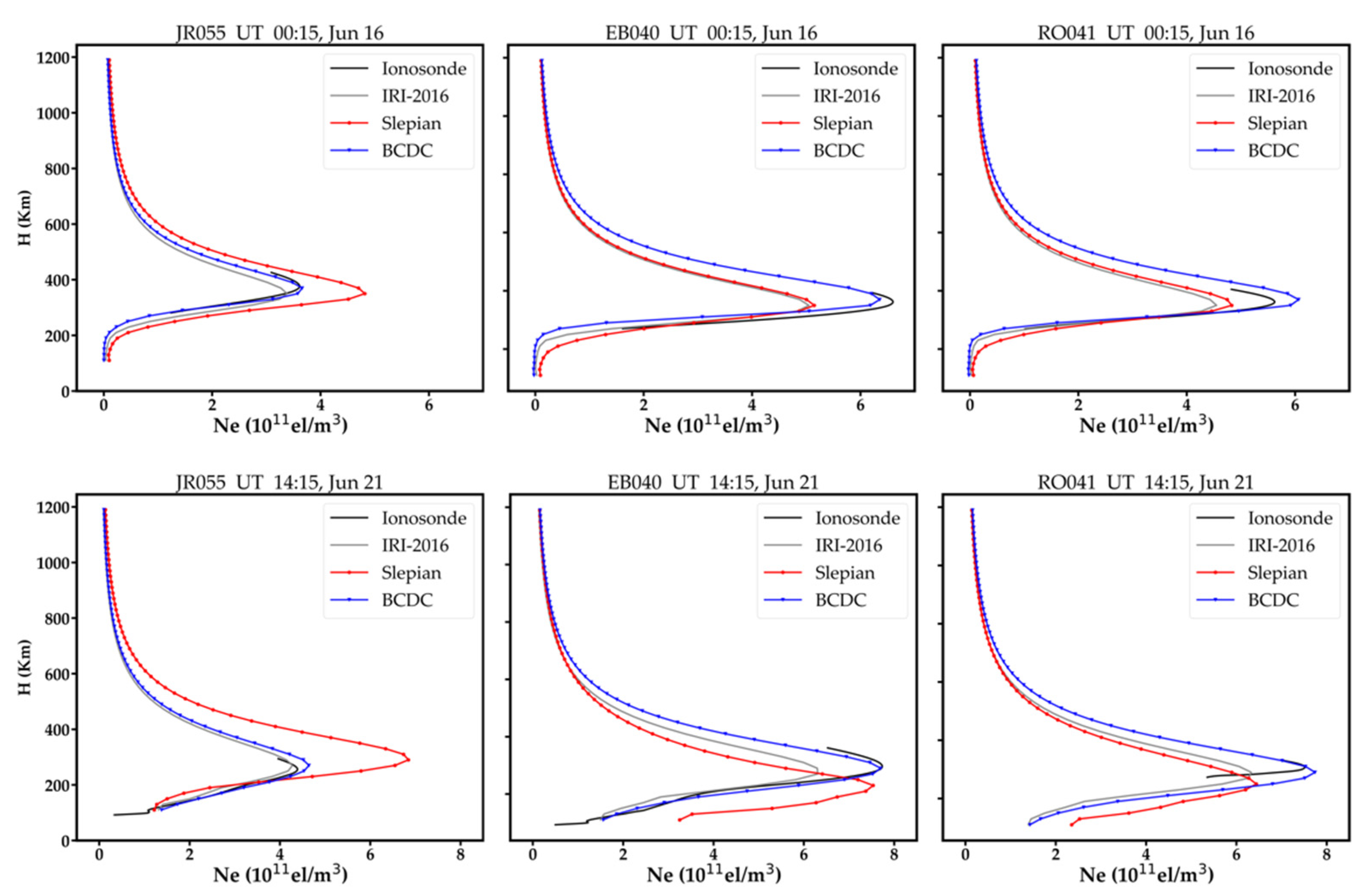
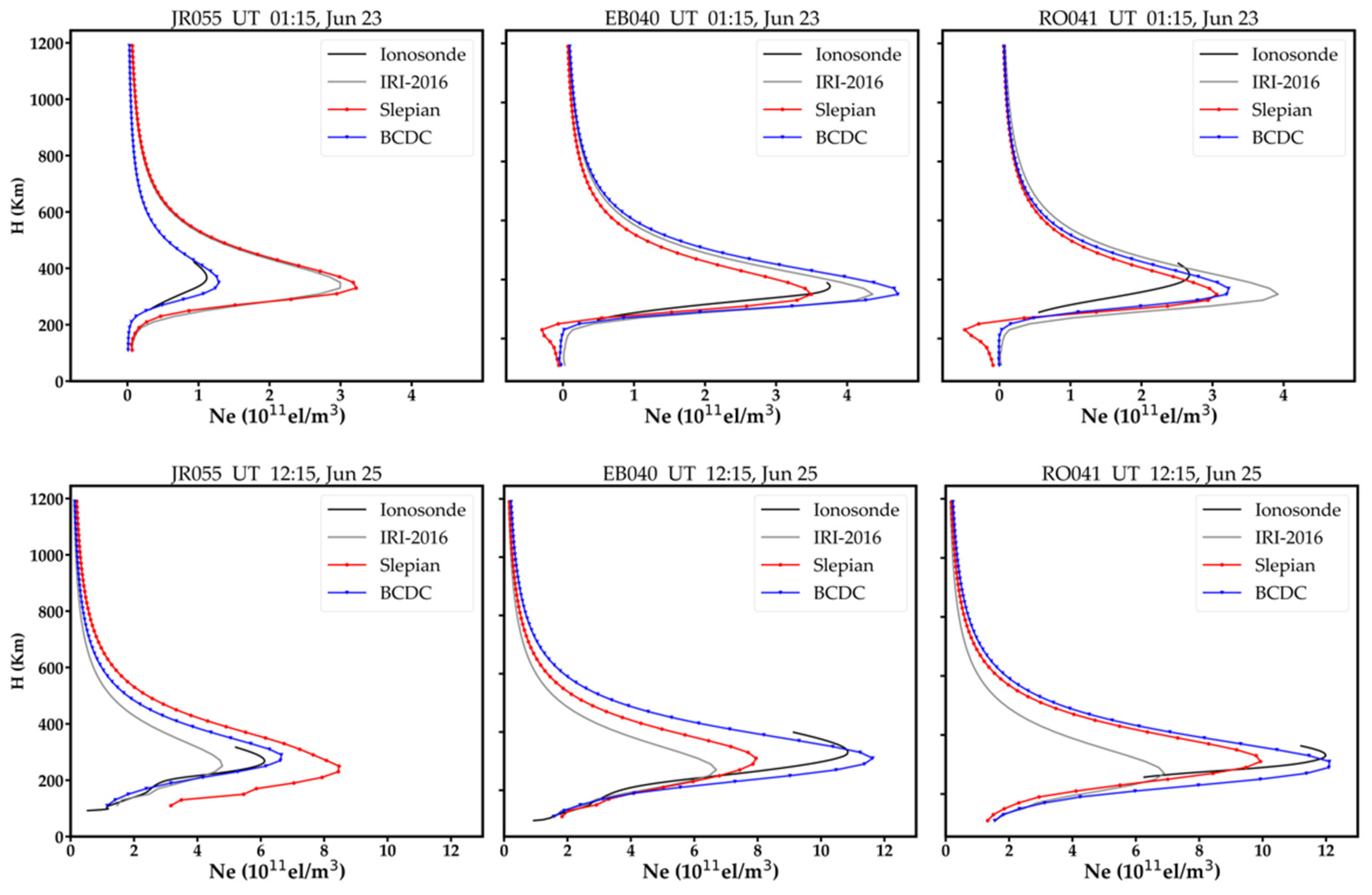
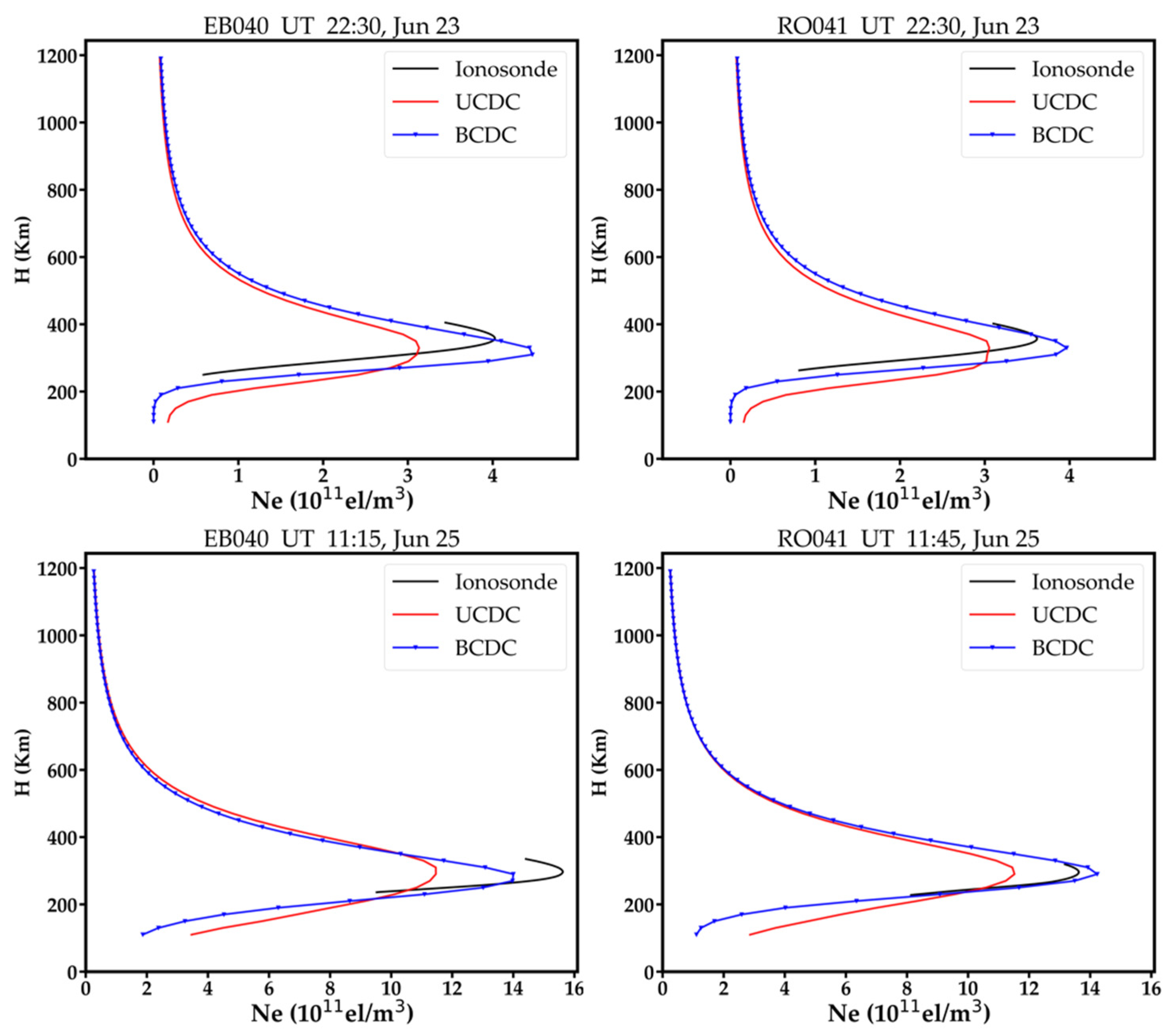
3.2.2. Vertical Profile Validations
3.2.3. NmF2 and HmF2 Validations
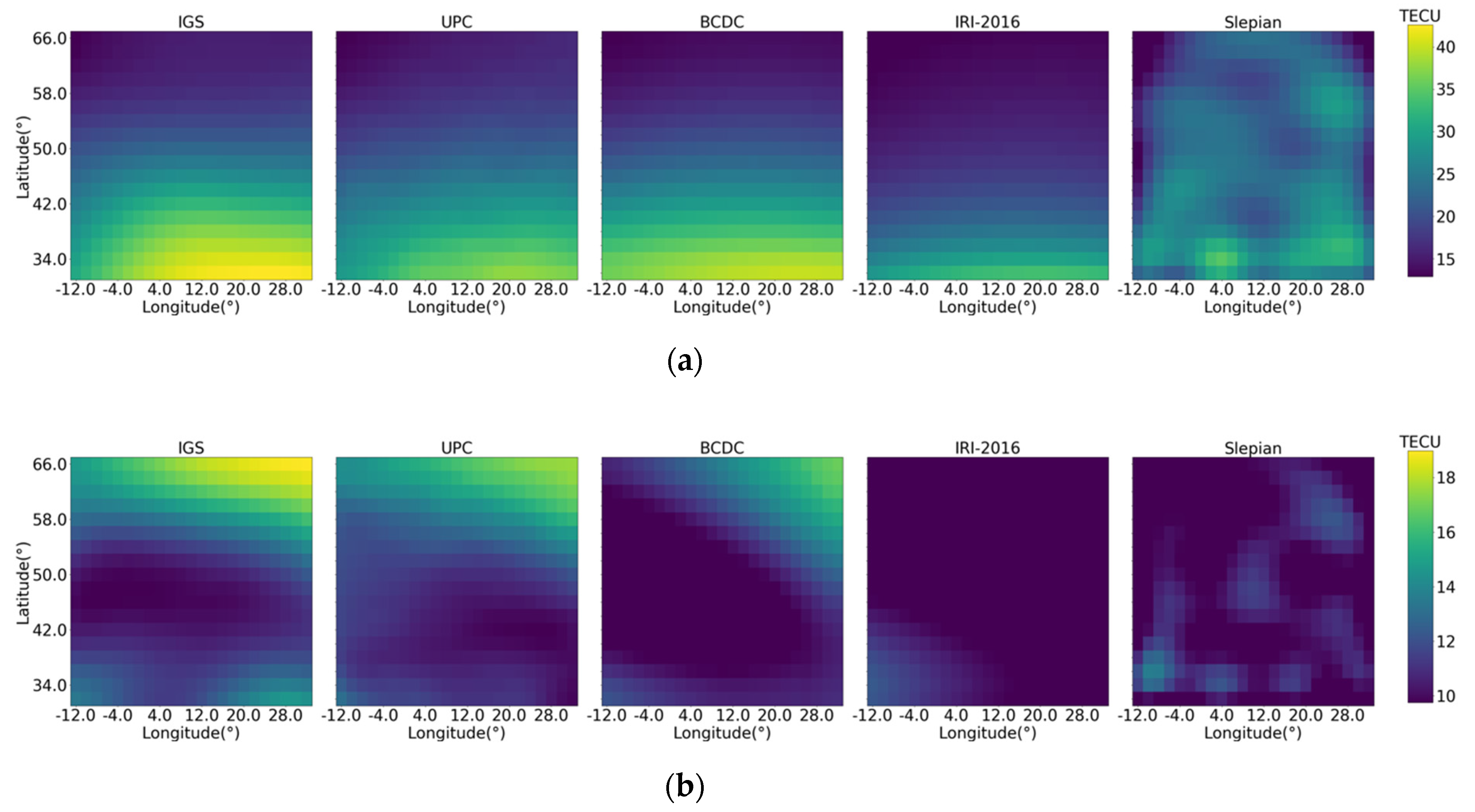
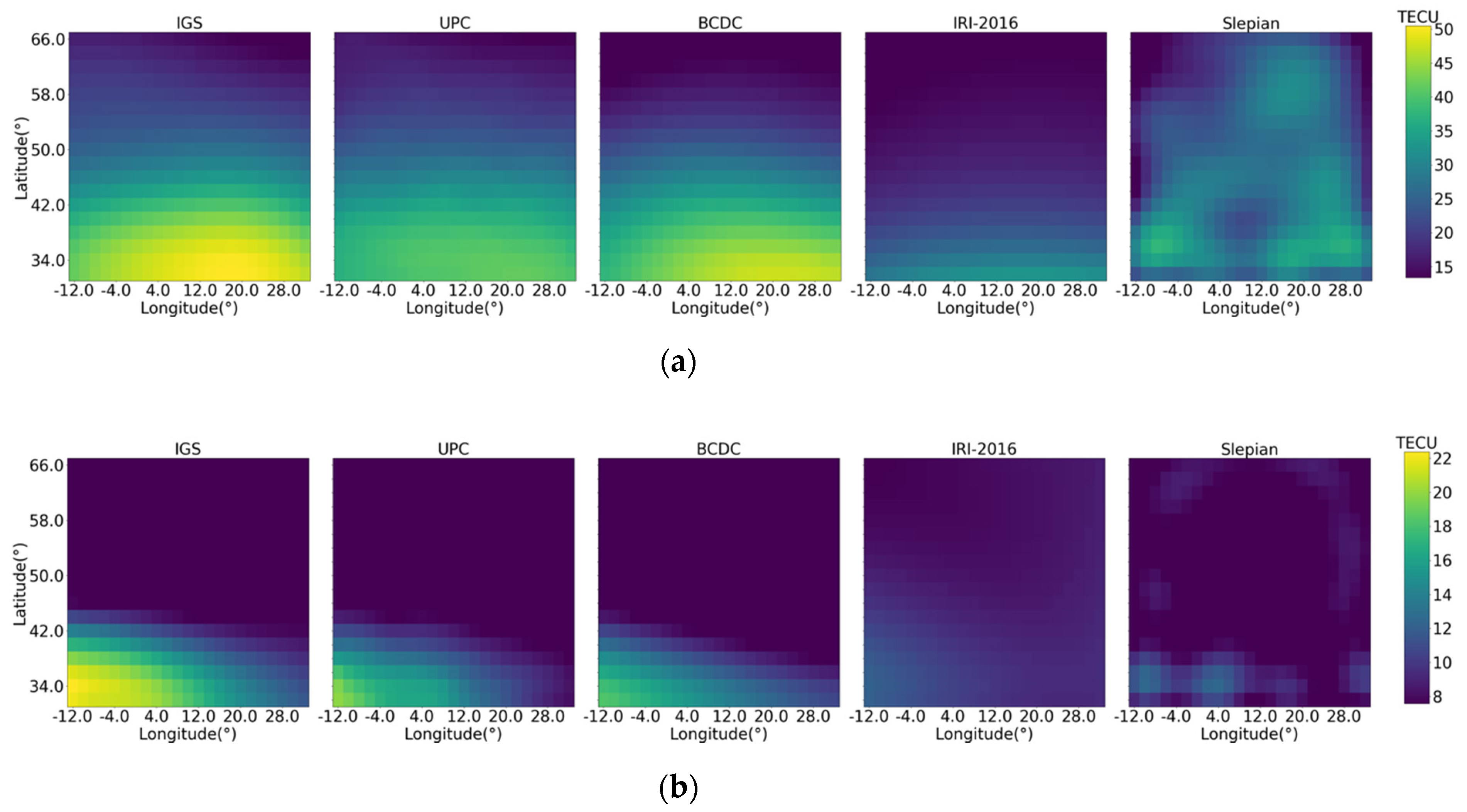
3.2.4. VTEC Validations
4. Discussion
4.1. Balance Cost Function
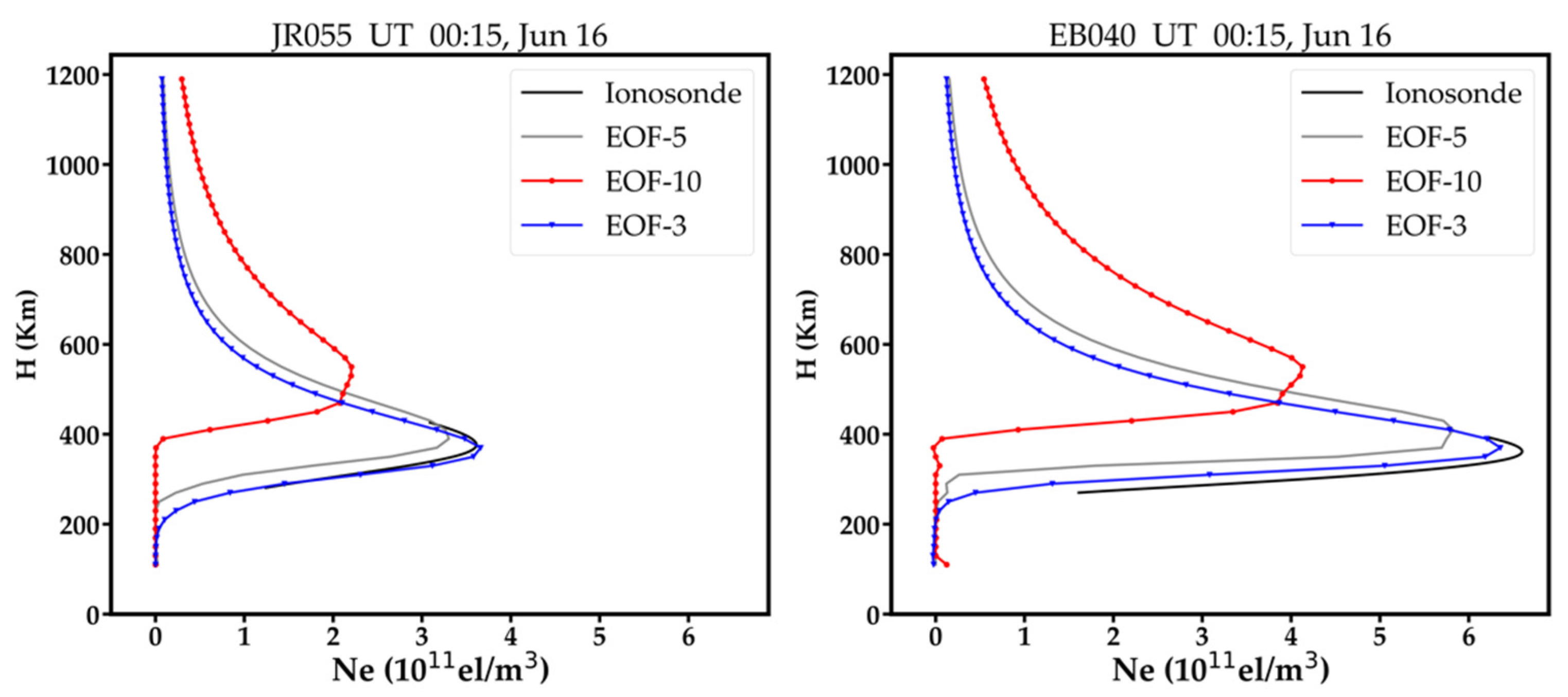
4.2. Number of Dominated EOFs
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Su, K.; Jin, S.; Hoque, M.M. Evaluation of Ionospheric Delay Effects on Multi-GNSS Positioning Performance. Remote Sens. 2019, 11, 171. [Google Scholar] [CrossRef]
- Austen, J.R.; Franke, S.J.; Liu, C.H.; Yeh, K.C. Application of computerized tomography techniques to ionospheric research. In Proceedings of the International Beacon Satellite Symposium on Radio Beacon Contribution to the Study of Ionization and Dynamics of the Ionosphere and to Corrections to Geodesy and Technical Workshop, Oulu, Finland, 9–14 June 1986; pp. 25–35, Part 1. [Google Scholar]
- Rius, A.; Ruffini, G.; Cucurull, L. Improving the vertical resolution of ionospheric tomography with GPS occultations. Geophys. Res. Lett. 1997, 24, 2291–2294. [Google Scholar] [CrossRef]
- Raymund, T.D.; Austen, J.R.; Franke, S.J.; Liu, C.H.; Klobuchar, J.A.; Stalker, J. Application of computerized tomography to the investigation of ionospheric structures. Radio Sci. 1990, 25, 771–789. [Google Scholar] [CrossRef]
- Pryse, S.E.; Kersley, L.; Rice, D.L.; Russell, C.D.; Walker, I.K. Tomographic imaging of the ionospheric mid-latitude trough. Ann. Geophys. 1993, 11, 144–149. [Google Scholar]
- Bhuyan, K.; Singh, S.B.; Bhuyan, P.K. Tomographic reconstruction of the ionosphere using generalized singular value decomposition. Curr. Sci. India 2002, 83, 1117–1120. [Google Scholar]
- Farzaneh, S.; Forootan, E. Reconstructing Regional Ionospheric Electron Density: A Combined Spherical Slepian Function and Empirical Orthogonal Function Approach. Surv. Geophys. 2018, 39, 289–309. [Google Scholar] [CrossRef]
- Yao, Y.B.; Zhai, C.Z.; Kong, J.; Zhao, Q.; Zhao, C. A modified three-dimensional ionospheric tomography algorithm with side rays. GPS Solut. 2018, 22, 107. [Google Scholar] [CrossRef]
- Chen, C.H.; Saito, A.; Lin, C.H.; Yamamoto, M.; Suzuki, S.; Seemala, G.K. Medium-scale traveling ionospheric disturbances by three-dimensional ionospheric GPS tomography. Earth Planets Space 2016, 68, 32. [Google Scholar] [CrossRef]
- Chen, B.Y.; Wu, L.X.; Dai, W.J.; Luo, X.; Xu, Y. A new parameterized approach for ionospheric tomography. GPS Solut. 2019, 23, 96. [Google Scholar] [CrossRef]
- Seemala, G.K.; Yamamoto, M.; Saito, A.; Chen, C.H. Three-dimensional GPS ionospheric tomography over Japan using constrained Least Squares. J. Geophys. Res. 2014, 119, 3044–3052. [Google Scholar] [CrossRef]
- Zheng, D.Y.; Yao, Y.B.; Nie, W.F.; Liao, M.; Liang, J.; Ao, M. Ordered Subsets-Constrained ART Algorithm for Ionospheric Tomography by Combining VTEC Data. IEEE Trans. Geosci. Remote Sens. 2021, 59, 7051–7061. [Google Scholar] [CrossRef]
- Wen, D.B.; Liu, S.J.; Tang, P.Y. Tomographic reconstruction of ionospheric electron density based on constrained algebraic reconstruction technique. GPS Solut. 2010, 14, 375–380. [Google Scholar] [CrossRef]
- He, L.M.; Heki, K. Three-dimensional tomography of ionospheric anomalies immediately before the 2015 Illapel earthquake, Central Chile. J. Geophys. Res. Space 2018, 123, 4015–4025. [Google Scholar] [CrossRef]
- Wen, D.B.; Yuan, Y.B.; Ou, J.K.; Zhang, K.; Liu, K. A hybrid reconstruction algorithm for 3-D ionospheric tomography. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1733–1739. [Google Scholar] [CrossRef]
- Zhao, H.S.; Yang, L.; Zhou, Y.L.; Ming, D. A AMART Algorithm Applied to Ionospheric Electron Reconstruction. Acta Geod. Cartogr. Sin. 2018, 47, 57–63. [Google Scholar] [CrossRef]
- Gerzen, T.; Minkwitz, D. Simultaneous multiplicative column-normalized method (SMART) for 3-D ionosphere tomography in comparison to other algebraic methods. Ann. Geophys.-Ger. 2016, 34, 97–115. [Google Scholar] [CrossRef][Green Version]
- Ma, X.F.; Maruyama, T.; Ma, G.; Takeda, T. Three-dimensional ionospheric tomography using observation data of GPS ground receivers and ionosonde by neural network. J. Geophys. Res. Space 2005, 110, A05308. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning internal representations by error propagation. In Parallel Distributed Processing; Rumelhart, D., Mclelland, J., Eds.; MIT Press: Cambridge, MA, USA, 1986; Volume 2, pp. 318–362. [Google Scholar]
- Hirooka, S.; Hattori, K.; Takeda, T. Numerical validations of neural network based ionospheric tomography for disturbed ionospheric conditions and sparse data. Radio Sci. 2011, 46, 1–13. [Google Scholar] [CrossRef]
- Razin, M.R.G.; Voosoghi, B. Regional application of multi-layer artificial neural networks in 3-D ionosphere tomography. Adv. Space Res. 2016, 58, 339–348. [Google Scholar] [CrossRef]
- Razin, M.R.G.; Voosoghi, B. Ionosphere tomography using wavelet neural network and particle swarm optimization training algorithm in Iranian case study. GPS Solut. 2017, 21, 1301–1314. [Google Scholar] [CrossRef]
- Zheng, D.Y.; Yao, Y.B.; Nie, W.F. A new three-dimensional computerized ionospheric tomography model based on a neural network. GPS Solut. 2020, 25, 10. [Google Scholar] [CrossRef]
- Zheng, D.Y.; Yao, Y.B.; Nie, W.F.; Yang, W.; Hu, W.; Ao, M.; Zheng, H. An Improved Iterative Algorithm for Ionospheric Tomography Reconstruction by Using the Automatic Search Technology of Relaxation Factor. Radio Sci. 2018, 53, 1051–1066. [Google Scholar] [CrossRef]
- Hannachi, A. Empirical Orthogonal Functions. In Patterns Identification and Data Mining in Weather and Climate; Springer Atmospheric Sciences; Springer: Cham, Switzerland, 2021; pp. 31–69. [Google Scholar] [CrossRef]
- Bilitza, D.; Altadill, D.; Truhlik, V.; Shubin, V.; Galkin, I.; Reinisch, B.; Huang, X. International Reference Ionosphere 2016: From ionospheric climate to real-time weather predictions. Space Weather 2017, 15, 418–429. [Google Scholar] [CrossRef]
- Hong, J.; Kim, Y.H.; Chung, J.K.; Ssessanga, N.; Kwak, Y.-S. Tomography reconstruction of ionospheric electron density with empirical orthonormal functions using Korea GNSS network. J. Astron. Space Sci. 2017, 34, 7–17. [Google Scholar] [CrossRef]
- Dvinskikh, N.I. Expansion of ionospheric characteristics fields in empirical orthogonal functions. Adv. Space Res. 1988, 8, 179–187. [Google Scholar] [CrossRef]
- Aa, E.; Ridley, A.; Huang, W.G.; Zou, S.; Liu, S.; Coster, A.J.; Zhang, S. An Ionosphere Specification Technique Based on Data Ingestion Algorithm and Empirical Orthogonal Function Analysis Method. Space Weather 2018, 16, 1410–1423. [Google Scholar] [CrossRef]
- Chapman, S. The absorption and dissociative or ionizing effect of monochromatic radiation in an atmosphere on a rotating earth. Proc. Phys. Soc. 1931, 43, 26–45. [Google Scholar] [CrossRef]
- Hernandez-Pajares, M.; Garcia-Fernandez, M.; Rius, A.; Notarpietro, R.; Von Engeln, A.; Olivares-Pulido, G.; Aragón-Àngel, À.; García-Rigo, A. Electron density extrapolation above F2 peak by the linear Vary-Chap model supporting new Global Navigation Satellite Systems-LEO occultation missions. J. Geophys. Res. Space 2017, 122, 9003–9014. [Google Scholar] [CrossRef]
- Sezen, U.; Arikan, F.; Arikan, O.; Ugurlu, O.; Sadeghimorad, A. Online, automatic, near-real time estimation of GPS-TEC: IONOLAB-TEC. Space Weather 2013, 11, 297–305. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| BCDC | Slepian | IRI-2016 | |
|---|---|---|---|
| RMSE | 2.31 | 4.49 | 5.87 |
| ∆RMSE | - | 48.6% | 60.6% |
| Stations | Methods | RMSE | ∆RMSE | Stations | Methods | RMSE | ∆RMSE |
|---|---|---|---|---|---|---|---|
| DB049 | BCDC | 0.82 | - | JR055 | BCDC | 0.77 | - |
| IRI-2016 | 1.27 | 35.4% | IRI-2016 | 1.0 | 29.9% | ||
| Slepian | 0.93 | 9.7% | Slepian | 1.29 | 40.3% | ||
| EB040 | BCDC | 1.10 | - | FF051 | BCDC | 0.97 | - |
| IRI-2016 | 2.40 | 54.2% | IRI-2016 | 1.27 | 23.6% | ||
| Slepian | 1.98 | 44.4% | Slepian | 1.05 | 7.6% | ||
| RO041 | BCDC | 1.11 | - | Average | BCDC | 0.95 | - |
| IRI-2016 | 2.24 | 50.4% | IRI-2016 | 1.64 | 42.1% | ||
| Slepian | 1.87 | 40.6% | Slepian | 1.42 | 33.1% |
| Stations | Methods | RMSE | ∆RMSE | Stations | Methods | RMSE | ∆RMSE |
|---|---|---|---|---|---|---|---|
| DB049 | BCDC | 30.4 | - | JR055 | BCDC | 26.6 | - |
| IRI-2016 | 28.1 | −8.2% | IRI-2016 | 23.8 | −11.8% | ||
| Slepian | 37.4 | 18.7% | Slepian | 33.5 | 20.6% | ||
| EB040 | BCDC | 36.3 | - | FF051 | BCDC | 37.6 | - |
| IRI-2016 | 33.7 | −7.7% | IRI-2016 | 31.0 | −21.3% | ||
| Slepian | 34.9 | −4.0% | Slepian | 35.5 | −5.9% | ||
| RO041 | BCDC | 31.8 | - | Average | BCDC | 32.5 | - |
| IRI-2016 | 29.9 | −6.4% | IRI-2016 | 29.3 | −10.9% | ||
| Slepian | 32.0 | 0.6% | Slepian | 34.7 | 6.3% |
| IGS | UPC | |||||
|---|---|---|---|---|---|---|
| BCDC | IRI-2016 | Slepian | BCDC | IRI-2016 | Slepian | |
| RMSE | 3.07 | 5.78 | 5.32 | 2.79 | 4.78 | 4.15 |
| ∆RMSE | - | 46.9% | 42.3% | - | 41.6% | 32.8% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Yu, J.; Dai, Y.; Zhu, Y.; Huang, Y. Ionosphere Tomographic Model Based on Neural Network with Balance Cost and Dynamic Correction Using Multi-Constraints. Atmosphere 2022, 13, 426. https://doi.org/10.3390/atmos13030426
Zhu H, Yu J, Dai Y, Zhu Y, Huang Y. Ionosphere Tomographic Model Based on Neural Network with Balance Cost and Dynamic Correction Using Multi-Constraints. Atmosphere. 2022; 13(3):426. https://doi.org/10.3390/atmos13030426
Chicago/Turabian StyleZhu, Haoyu, Jieqing Yu, Yuchen Dai, Yanyu Zhu, and Yingqi Huang. 2022. "Ionosphere Tomographic Model Based on Neural Network with Balance Cost and Dynamic Correction Using Multi-Constraints" Atmosphere 13, no. 3: 426. https://doi.org/10.3390/atmos13030426
APA StyleZhu, H., Yu, J., Dai, Y., Zhu, Y., & Huang, Y. (2022). Ionosphere Tomographic Model Based on Neural Network with Balance Cost and Dynamic Correction Using Multi-Constraints. Atmosphere, 13(3), 426. https://doi.org/10.3390/atmos13030426