
Methodology for Virtual Prediction of Vehicle-Related Particle Emissions and Their Influence on Ambient PM10 in an Urban Environment

 , ,
, ,  ,
,  and
and
Abstract
1. Introduction
2. Materials and Methods
2.1. Framework
2.2. Measurement Set-Up
2.3. Simulation Environment
3. Results
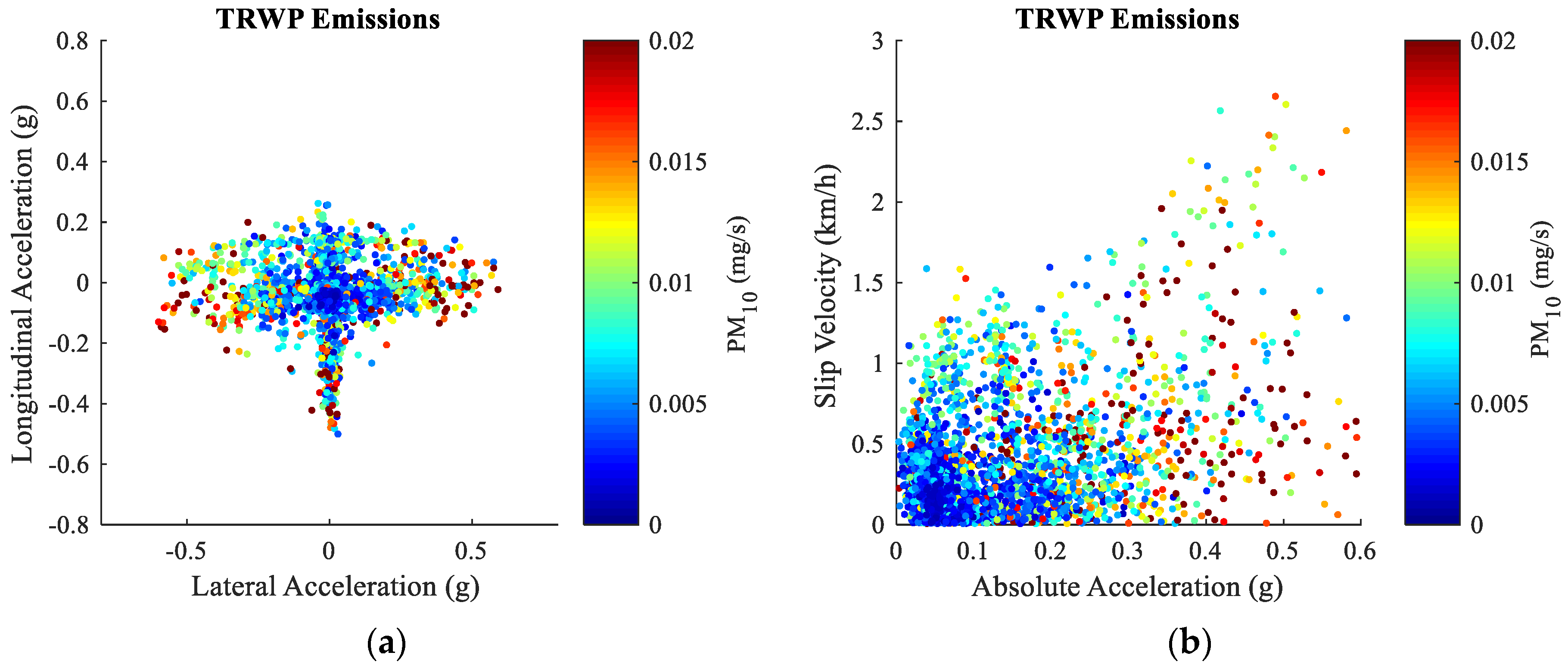
3.1. Influence Parameters of Particle Generation
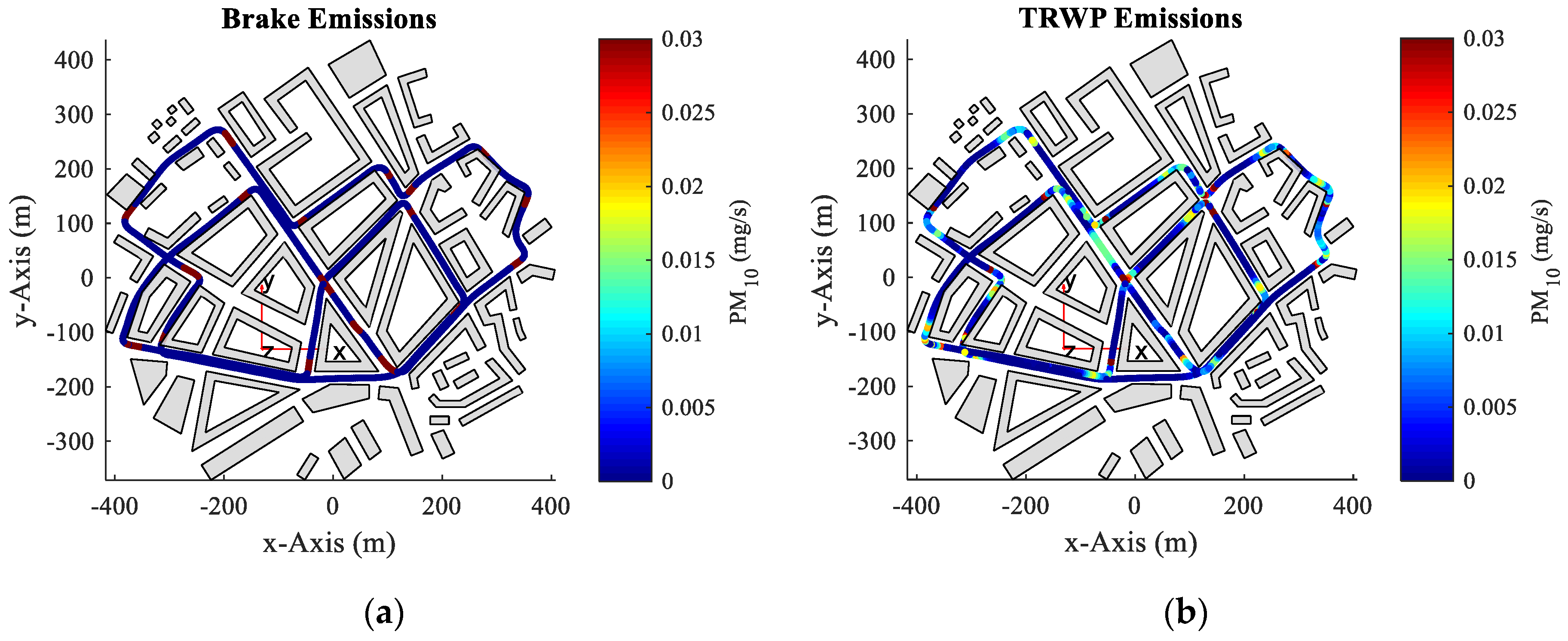
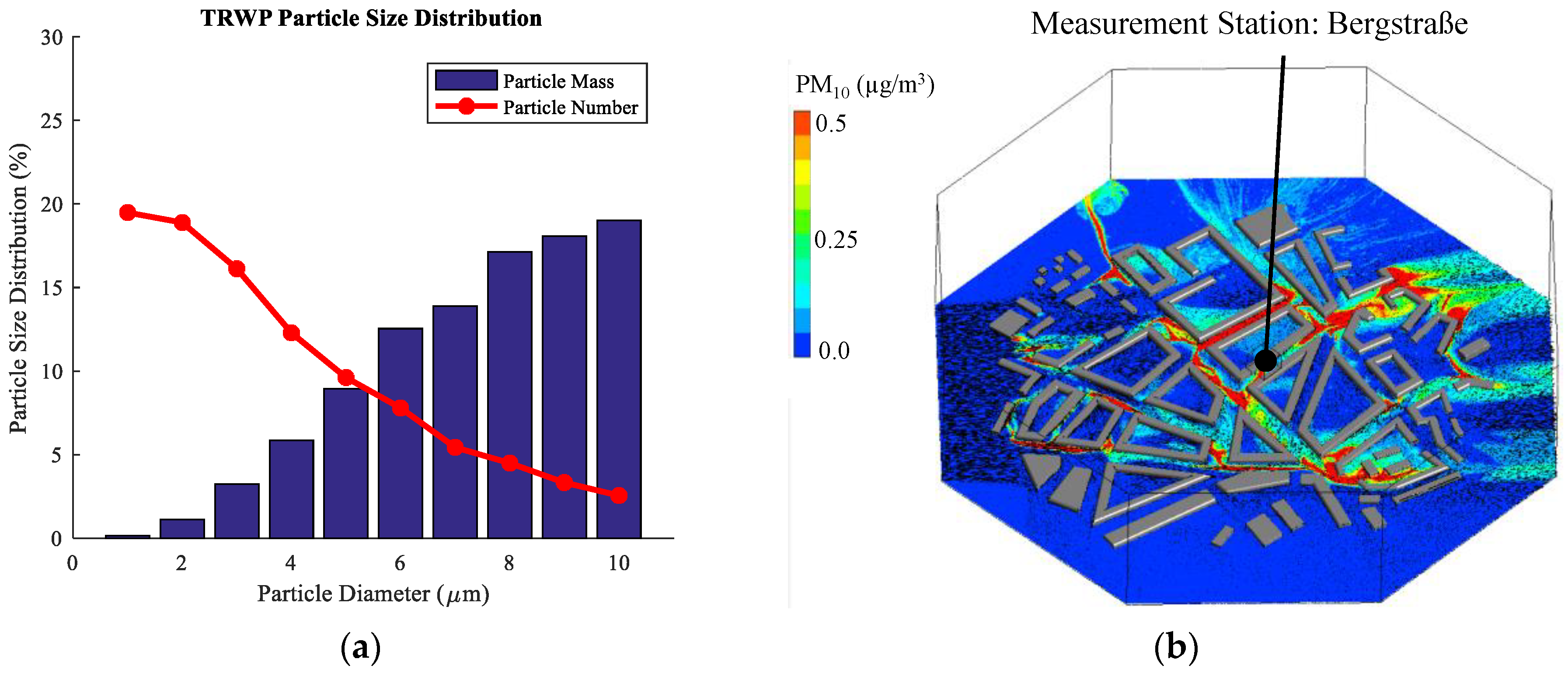
3.2. Prediction of Particle Generation
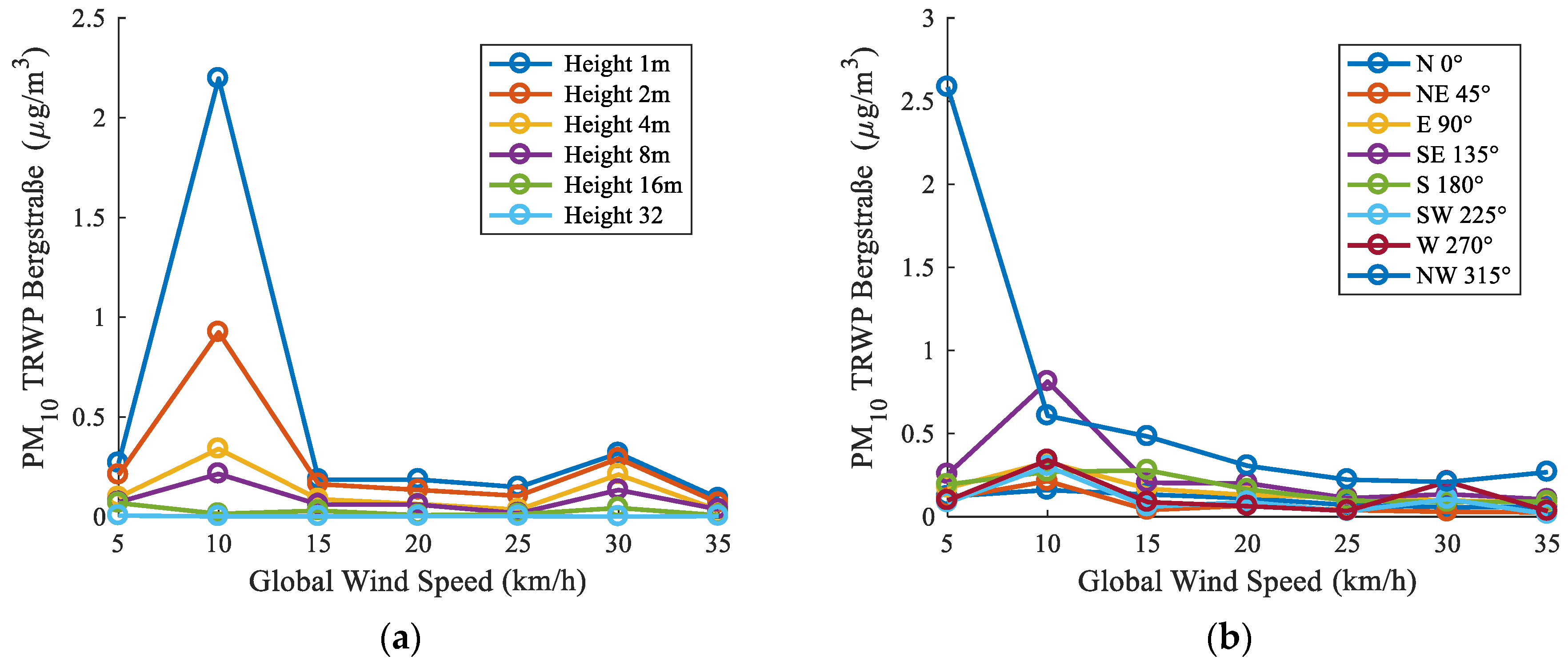
3.3. Prediction of Particle Dispersion in the Environment
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| List of abbreviations | ||
| Abbreviation | Name | |
| PN | Particle Number | |
| PM | Particulate Matter | |
| TRWP | Tire and Road Wear Particles | |
| CFD | Computational Fluid Dynamics | |
| ANN | Artificial Neural Network | |
| UFP | Ultra Fine Particles | |
| EFM | Exhaust Flow Meter | |
| CVS | Constant Volume Sampling | |
| DPM | Discrete Phase Model | |
| PSD | Particle Size Distribution | |
| RDE | Real Driving Emissions | |
| List of nomenclature | ||
| Symbol | Quantity | Unit |
| Particle flow (number/mass) | (#/s) (mg/s) | |
| Sample volume flow | (m3/s) | |
| Measurement efficiency | (%) | |
| Particle diameter | (m) | |
| Particle density | (kg/m3) | |
| Frictional power (brake) | (W) | |
| Frictional power (tire) | (W) | |
| Engine power | (W) | |
| Brake pressure | (bar) | |
| Brake pad contact area | (m2) | |
| Coefficient of friction (disc/pad) | (-) | |
| Brake disc velocity | (m/s) | |
| Vehicle mass | (kg) | |
| Longitudinal/lateral acceleration | (g) | |
| Density (air) | (kg/m3) | |
| Drag coefficient | (-) | |
| Cross sectional area (vehicle) | (m2) | |
| Vehicle speed | (m/s) | |
| Slip velocity | (m/s) | |
| Engine rpm | (1/s) | |
| Engine torque | (Nm) | |
References
- Grigoratos, T.; Martini, G. Non-Exhaust Traffic Related Emissions Literature Review; Publications Office of the European Union: Luxembourg, 2014. [Google Scholar] [CrossRef]
- Domínguez-Sáez, A.; Rattá, G.; Barriosa, C. Prediction of exhaust emission in transient conditions of a diesel engine fueled with animal fat using Artificial Neural Network and Symbolic Regression. Energy 2018, 149, 675–683. [Google Scholar] [CrossRef]
- Ghiasi, R.; Ettefagh, M.; Sadeghi, V. Prediction of a diesel engine exhaust gases physical properties with artificial neural network. In Proceedings of the 2014 IEEE International Symposium on Innovations in Intelligent Systems and Applications (INISTA), Alberobello, Italy, 23–25 June 2014; pp. 304–308. [Google Scholar] [CrossRef]
- Ricciardi, V. Advanced Control Functions of Automotive Brake Systems for the Optimization of Braking Performance, Brake Wear and Particle Emissions. Ph.D. Thesis, Technische Universität Ilmenau, Ilmenau, Germany, 2020. [Google Scholar] [CrossRef]
- Riva, G.; Valota, G.; Perricone, G.; Wahlström, J. An FEA approach to simulate disc brake wear and airborne particle emissions. Tribol. Int. 2019, 138, 90–98. [Google Scholar] [CrossRef]
- Saša, V.; Glisovic, J.; Stojanovic, N.; Grujic, I. Application of neural networks in predictions of brake wear particulate matter emission. J. Automob. Eng. 2022, 236, 1579–1594. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Zheng, D.; Schmerwitz, F.; Wriggers, P. An advanced abrasion model for tire wear. Wear 2018, 396–397, 75–85. [Google Scholar] [CrossRef]
- Braghin, F.; Cheli, F.; Melzi, S.; Resta, F. Tyre Wear Model: Validation and Sensitivity Analysis. Meccanica 2006, 41, 143–156. [Google Scholar] [CrossRef]
- Ivanov, R. Tire Wear Modeling. Transp. Probl. 2016, 11, 111–120. [Google Scholar] [CrossRef]
- Feißel, T.; Hesse, D.; Ricciardi, V.; Schiele, M.; Augsburg, K. Novel approaches for measuring and predicting particulate emissions from automotive brakes and tires. In 12th International Munich Chassis Symposium 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 708–728. [Google Scholar] [CrossRef]
- Wingstedt, E.; Reif, B.A.P. Numerical Simulations of Particle Dispersion in an Urban Area; Norwegian Defence Research Establishment (FFI): Oslo, Norway, 2012. [Google Scholar]
- Nikolova, I.; Janssen, S.; Vos, P.; Vrancken, K.; Mishra, V.; Berghmans, P. Dispersion modelling of traffic induced ultrafine particles in a street canyon in Antwerp, Belgium and comparison with observations. Sci. Total Environ. 2011, 412–413, 336–343. [Google Scholar] [CrossRef] [PubMed]
- Gidhagen, L.; Johansson, C.; Langner, J.; Olivares, G. Simulation of NOx and ultrafine particles in a street canyon in Stockholm, Sweden. Atmos. Environ. 2004, 38, 2029–2044. [Google Scholar] [CrossRef]
- Amorim, J.H.; Rodrigues, V.; Tavares, R.; Valente, J.; Borrego, C. CFD modelling of the aerodynamic effect of trees on urban air pollution dispersion. Sci. Total Environ. 2013, 461–462, 541–551. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.J.; Zhang, K.M. Modeling Near-Road Air Quality Using a Computational Fluid Dynamics Model, CFD-VIT-RIT. Environ. Sci. Technol. 2009, 43, 7778–7783. [Google Scholar] [CrossRef] [PubMed]
- Pospisil, J.; Jicha, M. Particle re-suspension in street canyon with two-way traffic. Int. J. Environ. Pollut. 2011, 44, 271–279. [Google Scholar] [CrossRef]
- Camelli, F.; Hanna, S.; Lohner, R. FEFLO CFD model study of flow and dispersion as influenced by tall buildings in New York city. In Proceedings of the Sixth Symposium on the Urban Environment, Atlanta, GA, USA, 31 January 2006. [Google Scholar]
- Feißel, T.; Hesse, D.; Augsburg, K.; Gramstat, S. Measurement of Vehicle Related Non Exhaust Particle Emissions under Real Driving Conditions. Eurobrake 2020, 1, 1–8. [Google Scholar] [CrossRef]
- Ninawe, G. Review of Vehicle Emission Measurement and Sampling System. Int. J. Innov. Res. Sci. Eng. Technol. 2015, 4, 7510–7516. [Google Scholar] [CrossRef]
- Hesse, D. Beitrag zur Experimentellen und Analytischen Beschreibung Partikelförmiger Bremsenemissionen. Ph.D. Thesis, Technische Universität Ilmenau, Ilmenau, Germany, 2020. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Power (Kw) | PM10 (mg/kWs) | PN (#/kWs) |
|---|---|---|---|
| Brake | |||
| TRWP | |||
| Exhaust |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feißel, T.; Büchner, F.; Kunze, M.; Rost, J.; Ivanov, V.; Augsburg, K.; Hesse, D.; Gramstat, S. Methodology for Virtual Prediction of Vehicle-Related Particle Emissions and Their Influence on Ambient PM10 in an Urban Environment. Atmosphere 2022, 13, 1924. https://doi.org/10.3390/atmos13111924
Feißel T, Büchner F, Kunze M, Rost J, Ivanov V, Augsburg K, Hesse D, Gramstat S. Methodology for Virtual Prediction of Vehicle-Related Particle Emissions and Their Influence on Ambient PM10 in an Urban Environment. Atmosphere. 2022; 13(11):1924. https://doi.org/10.3390/atmos13111924
Chicago/Turabian StyleFeißel, Toni, Florian Büchner, Miles Kunze, Jonas Rost, Valentin Ivanov, Klaus Augsburg, David Hesse, and Sebastian Gramstat. 2022. "Methodology for Virtual Prediction of Vehicle-Related Particle Emissions and Their Influence on Ambient PM10 in an Urban Environment" Atmosphere 13, no. 11: 1924. https://doi.org/10.3390/atmos13111924
APA StyleFeißel, T., Büchner, F., Kunze, M., Rost, J., Ivanov, V., Augsburg, K., Hesse, D., & Gramstat, S. (2022). Methodology for Virtual Prediction of Vehicle-Related Particle Emissions and Their Influence on Ambient PM10 in an Urban Environment. Atmosphere, 13(11), 1924. https://doi.org/10.3390/atmos13111924