
Forecasting Particulate Pollution in an Urban Area: From Copernicus to Sub-Km Scale



Abstract
:1. Introduction
2. Data and Methodology
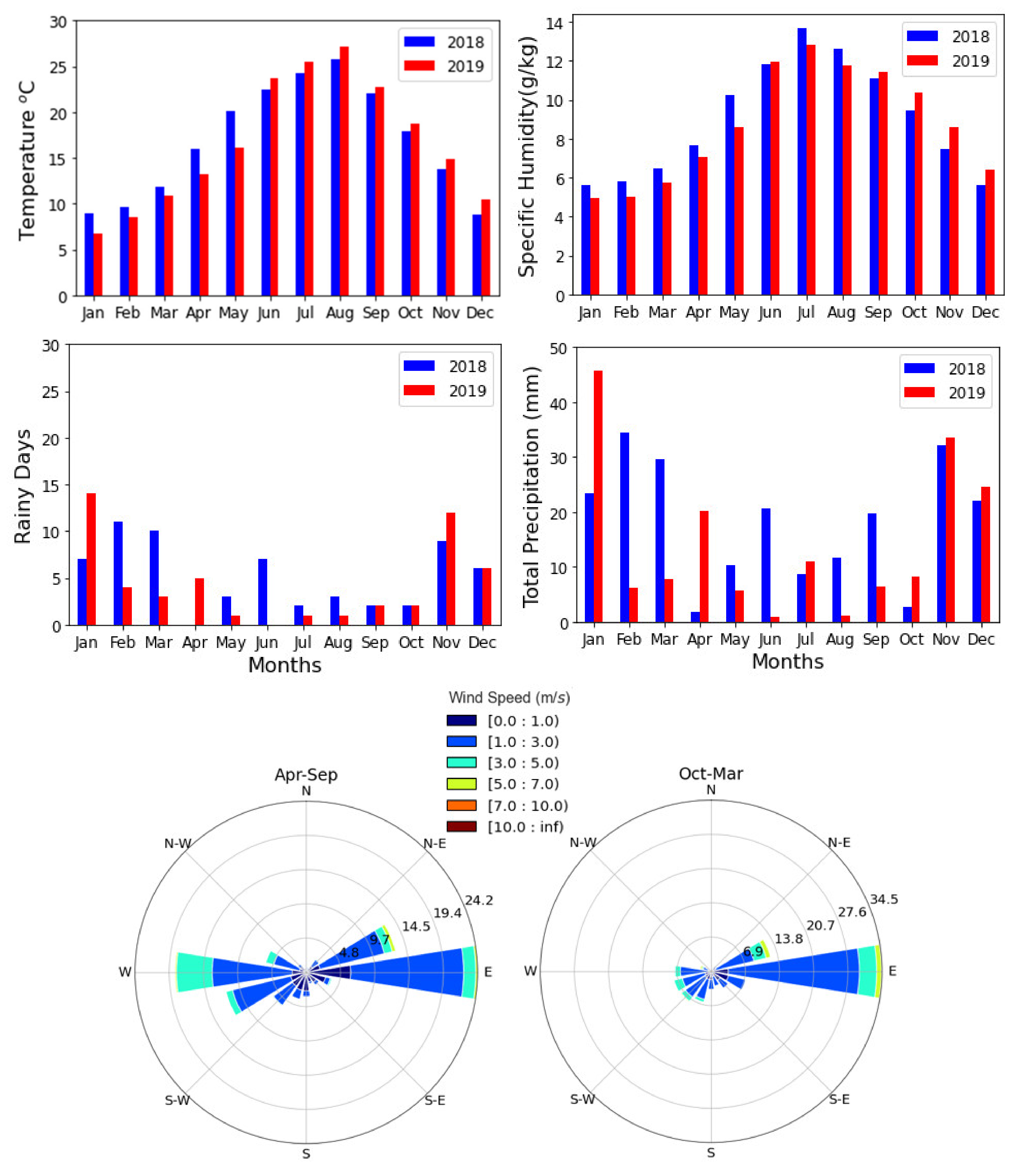
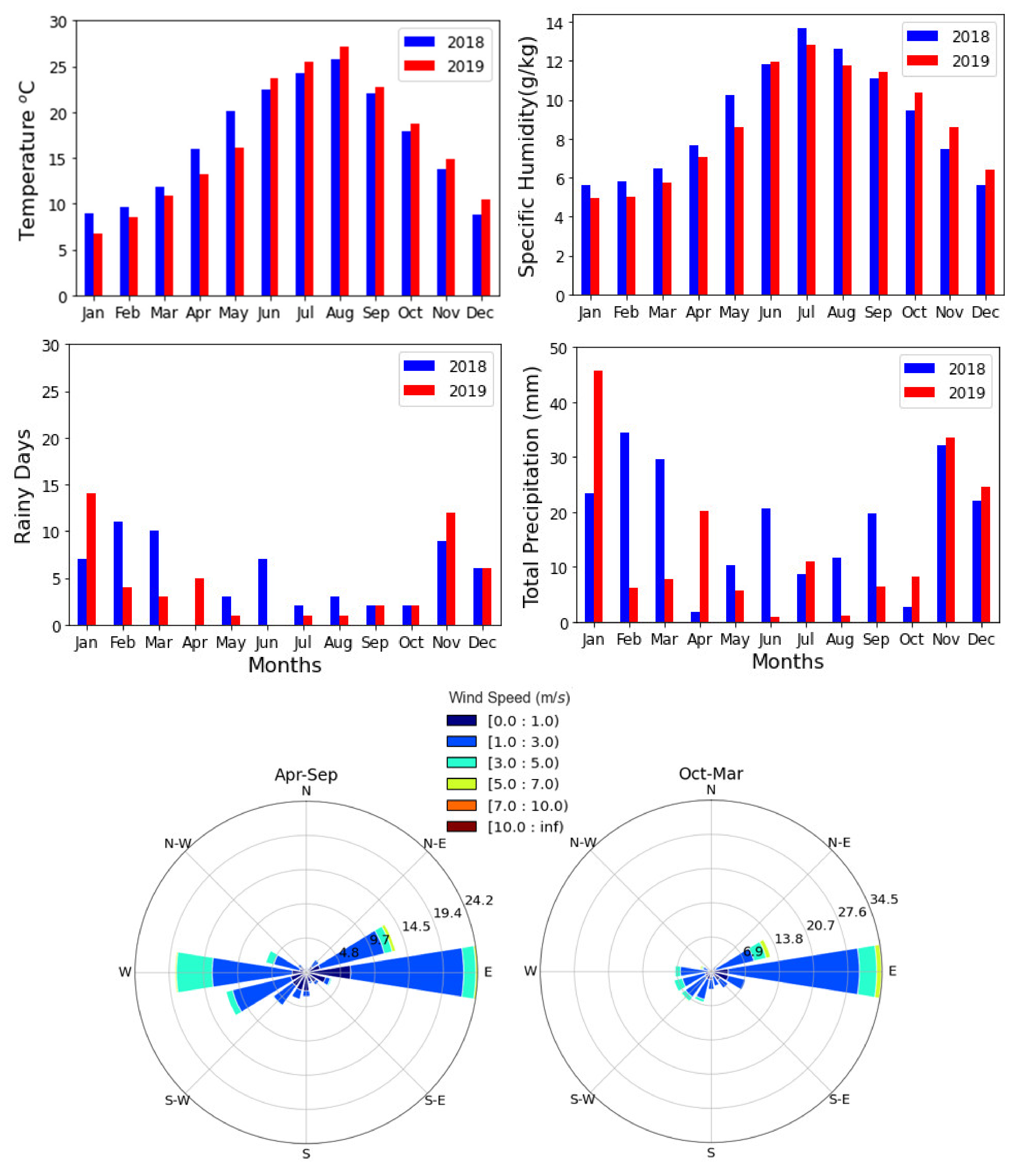
2.1. Investigation Area and Pollution Data
2.2. Algorithms
2.2.1. Analogue Ensemble
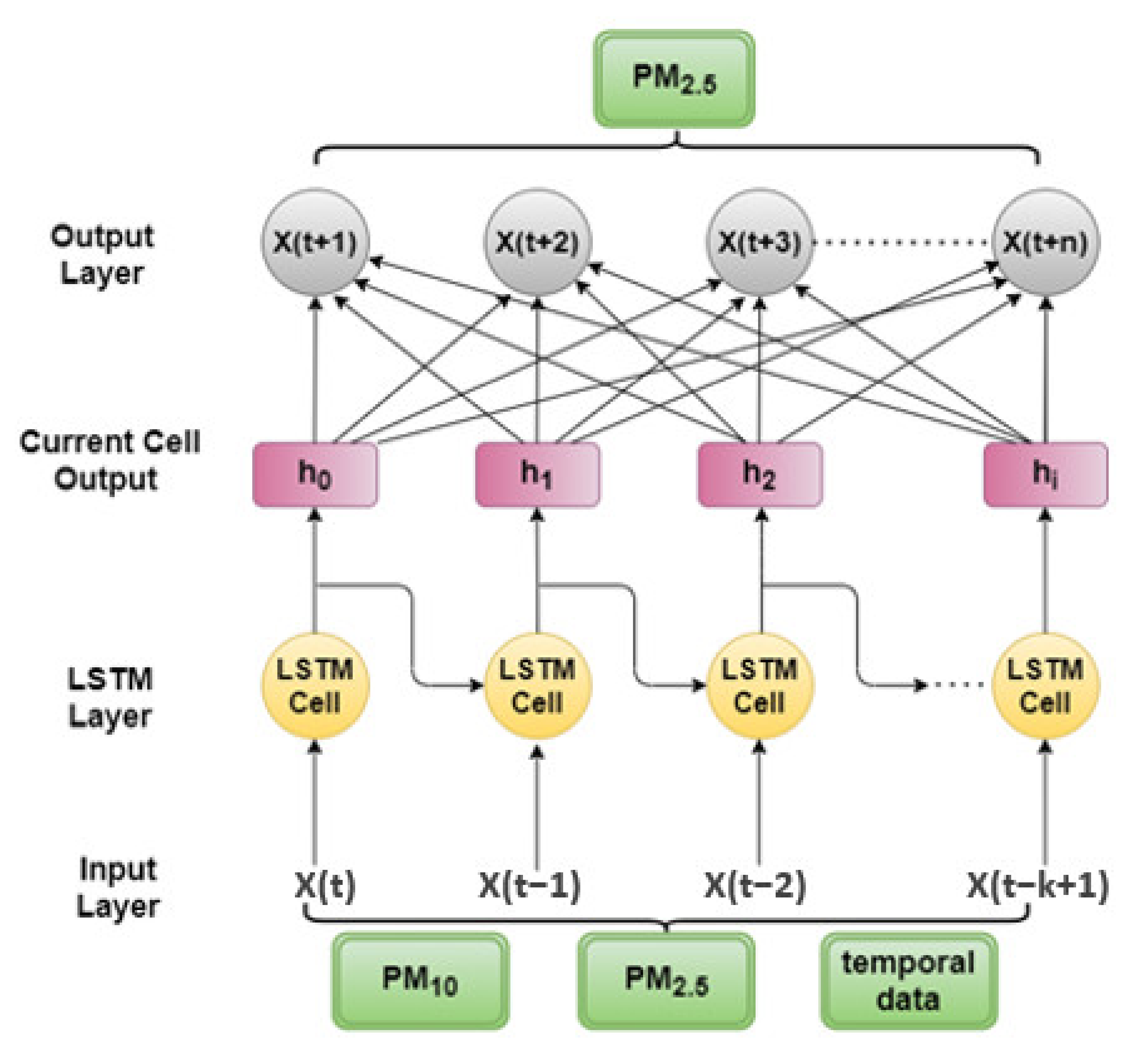
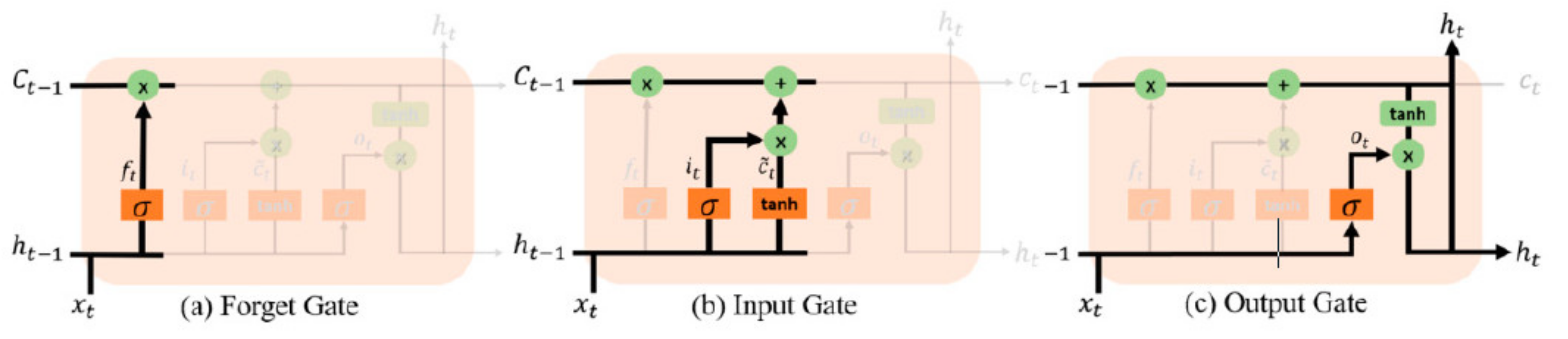
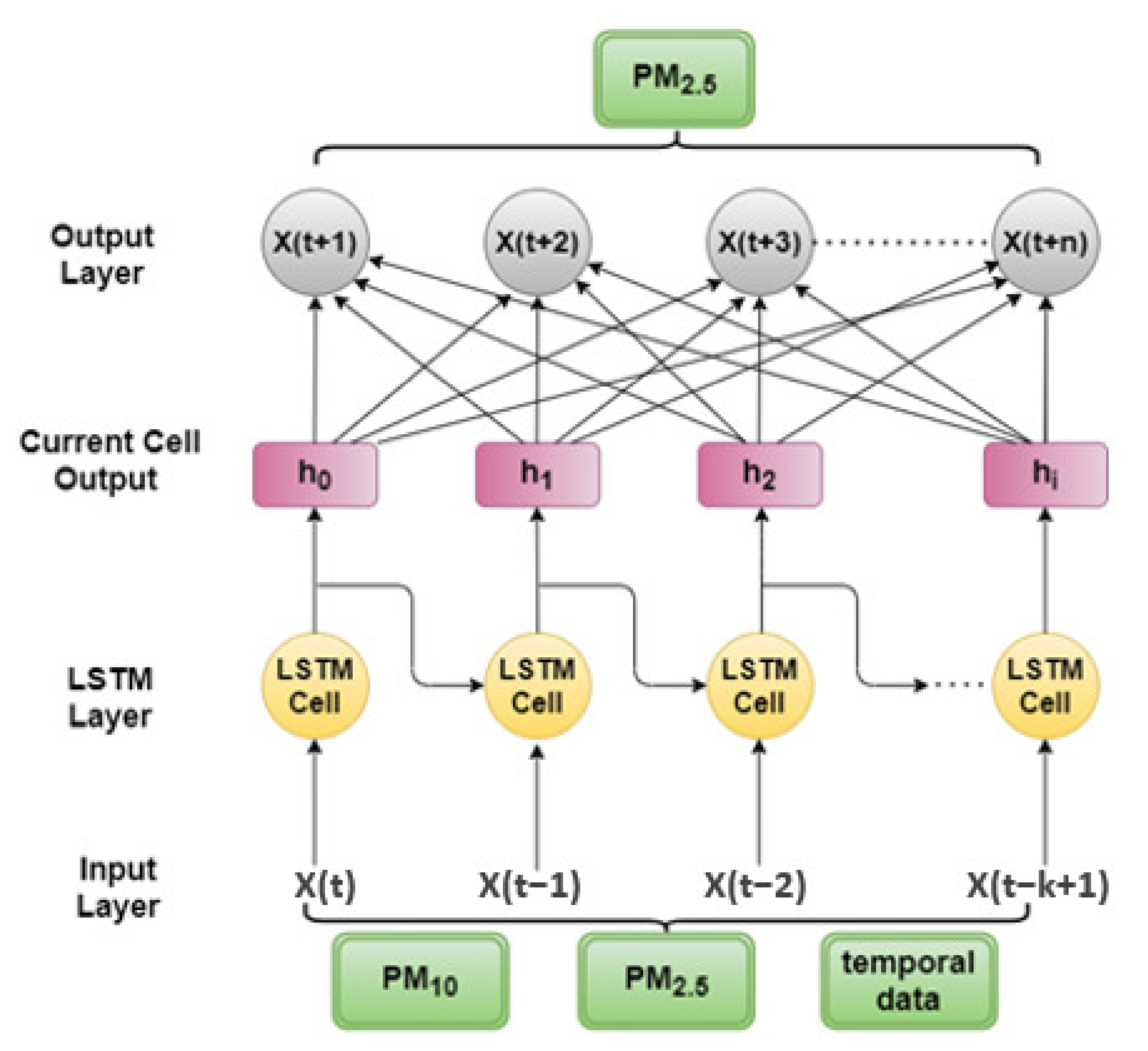
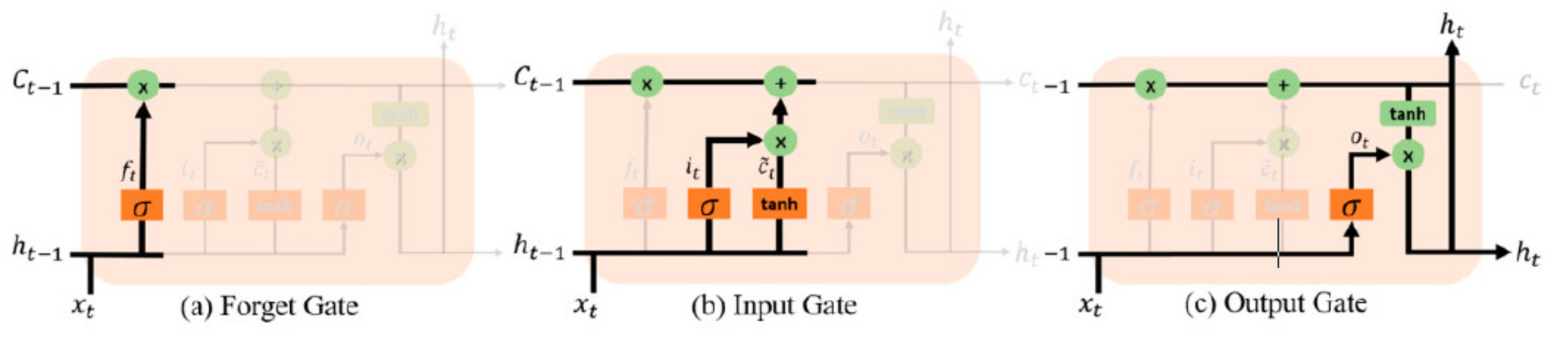
2.2.2. LSTM
2.3. Predictor Variables
2.4. Verification Methodology
3. Results and Discussion
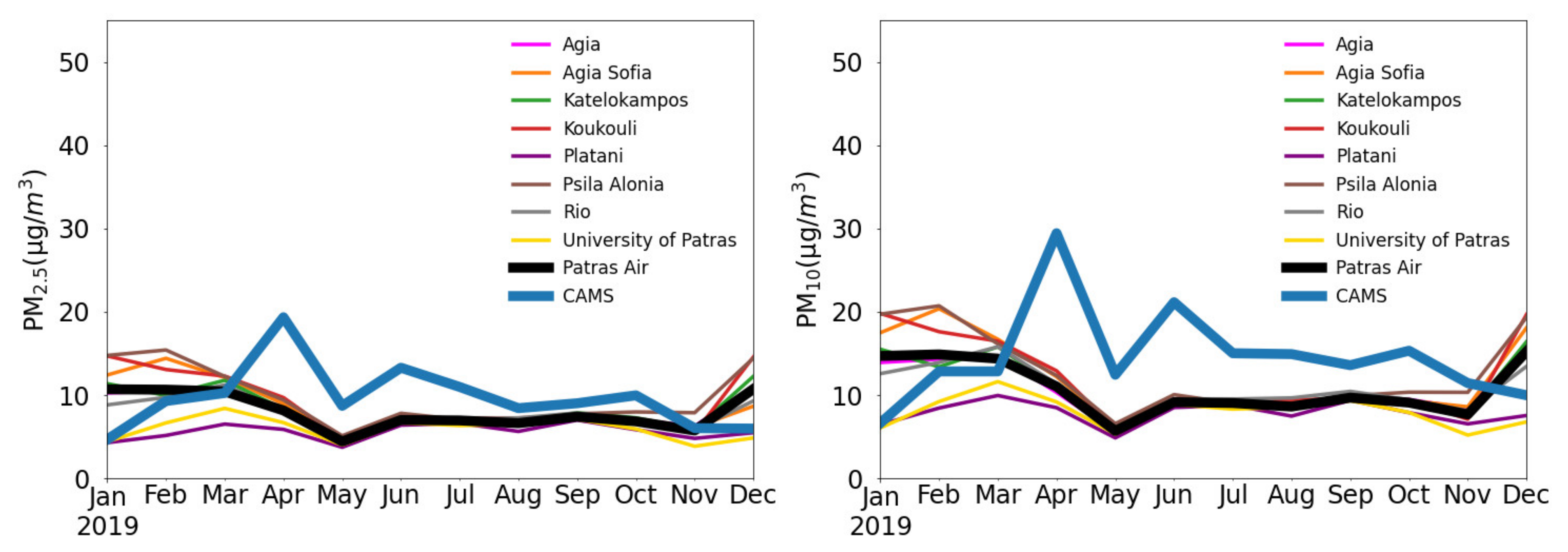
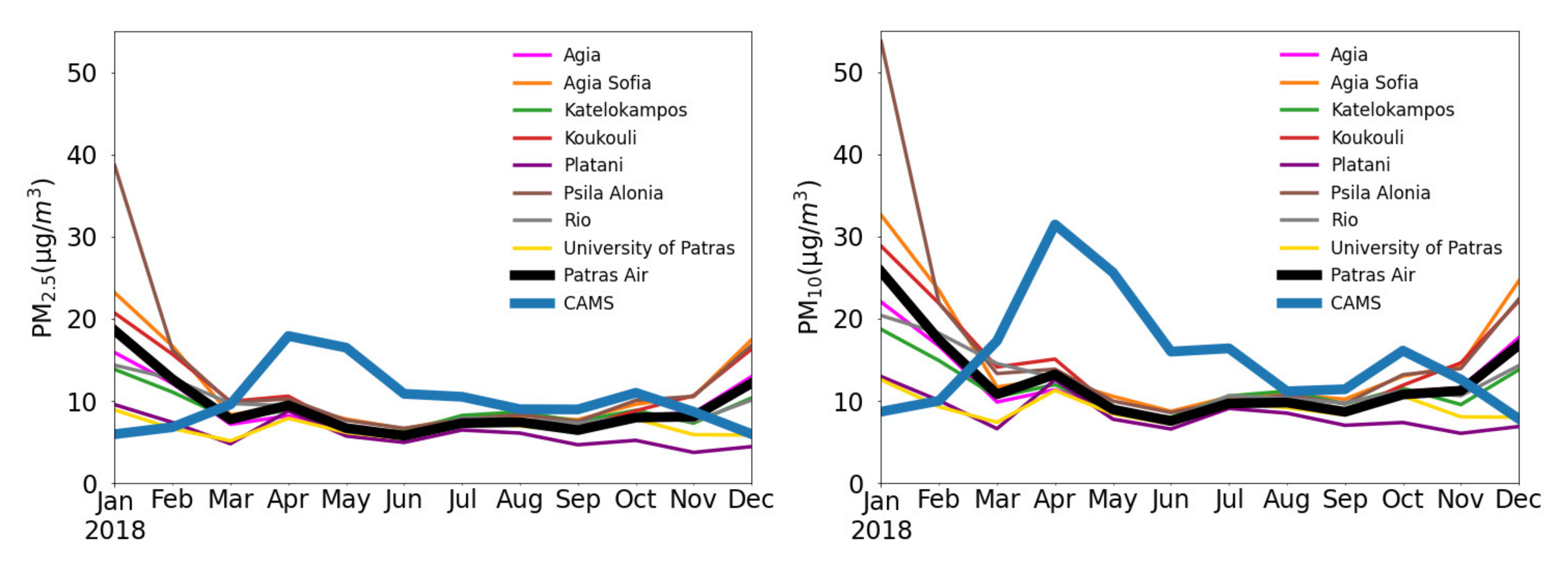
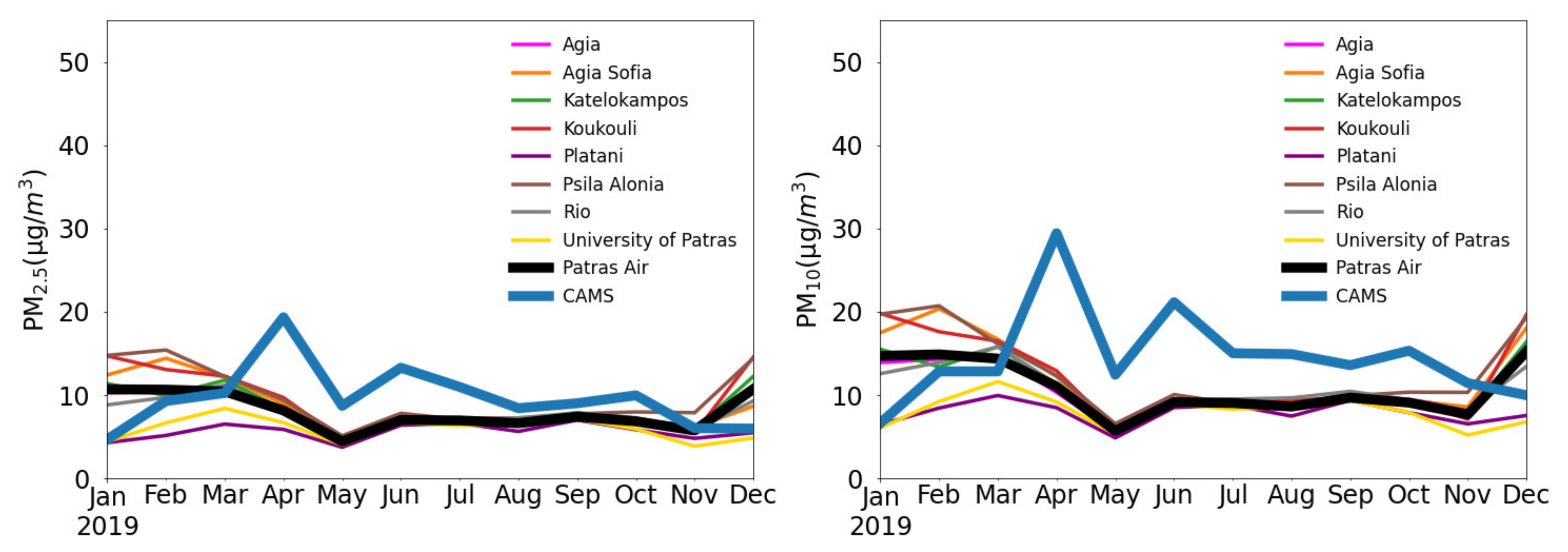
3.1. Observed PM Concentrations
3.2. CAMS Evaluation
3.3. Development of AnEn and LSTM Models
3.3.1. AnΕn
3.3.2. LSTM
3.4. AnEn & LSTM Forecast Verification (Validation Phazse)
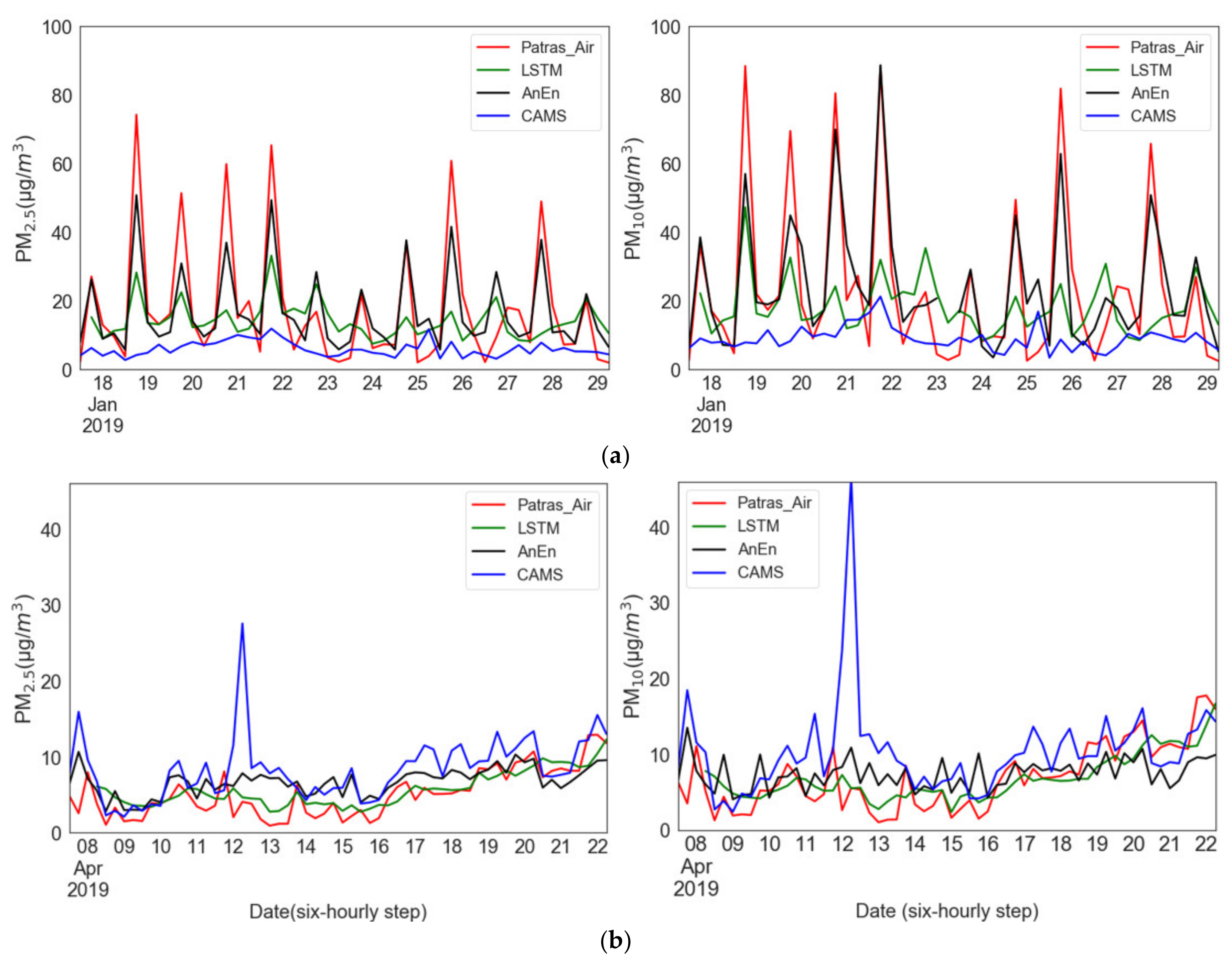
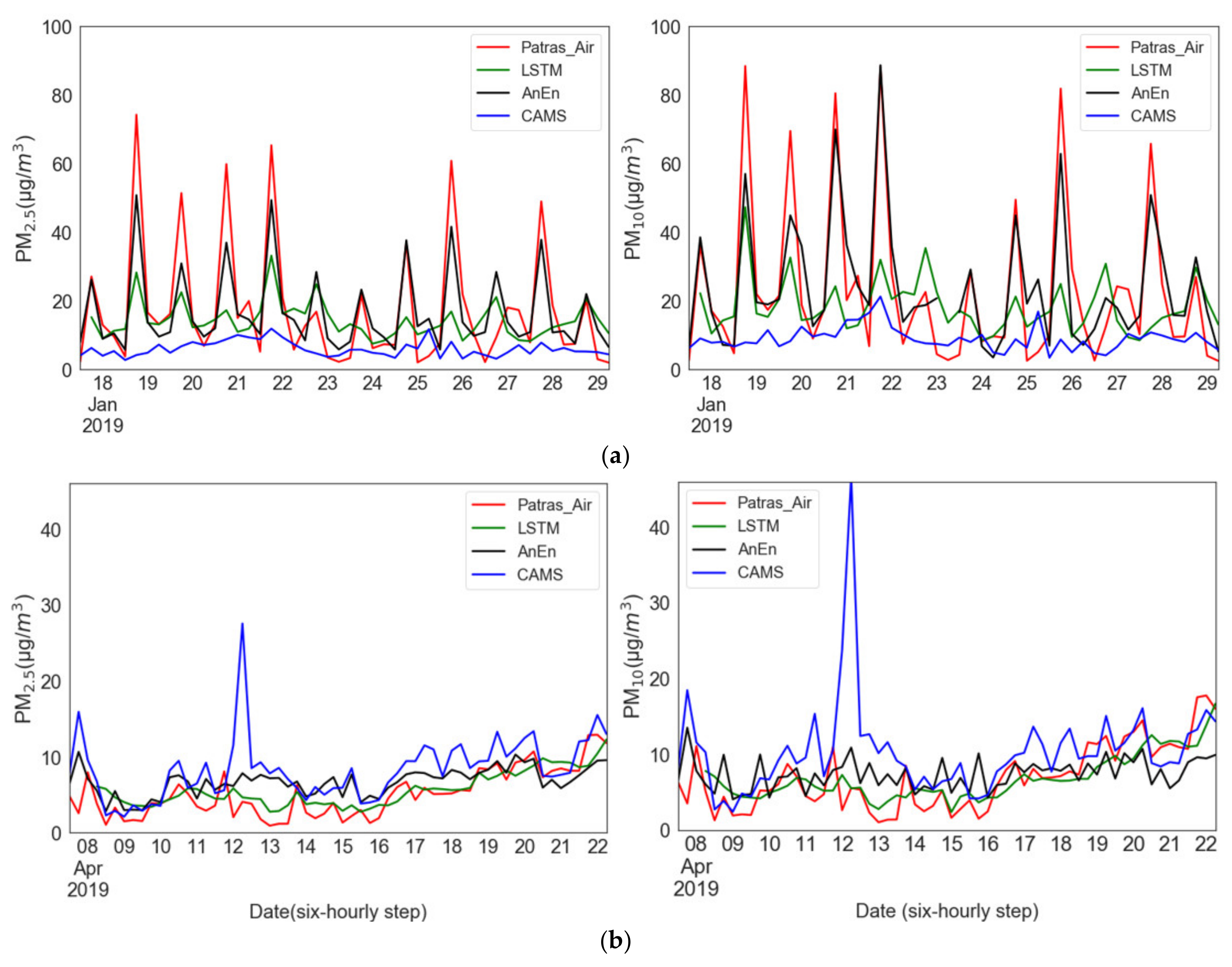
3.4.1. Time Series
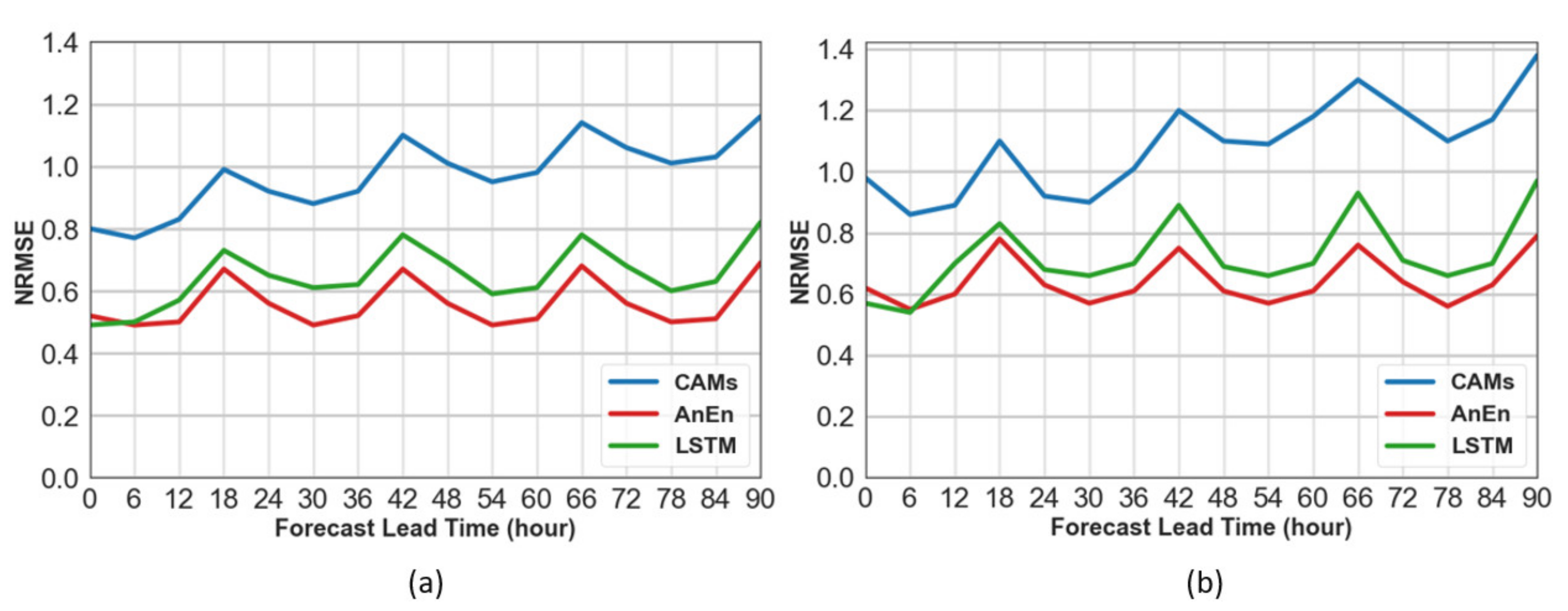
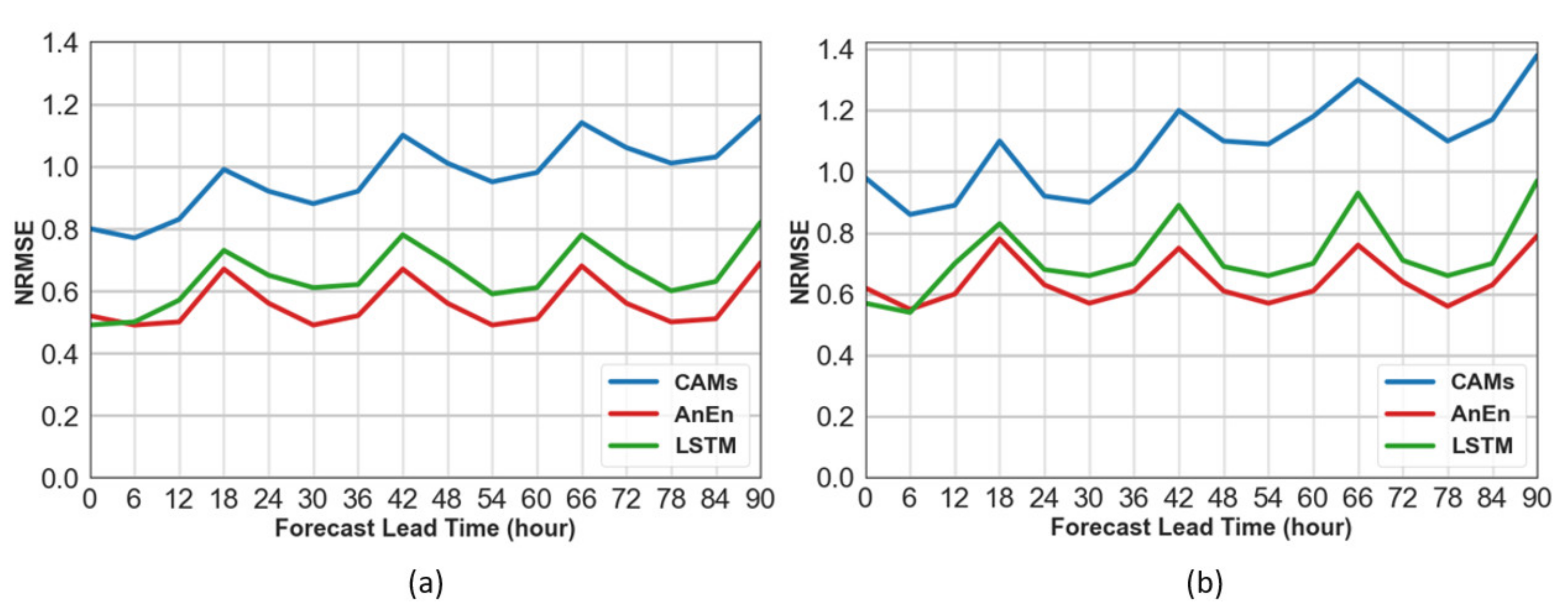
3.4.2. Degradation of Forecast Skill
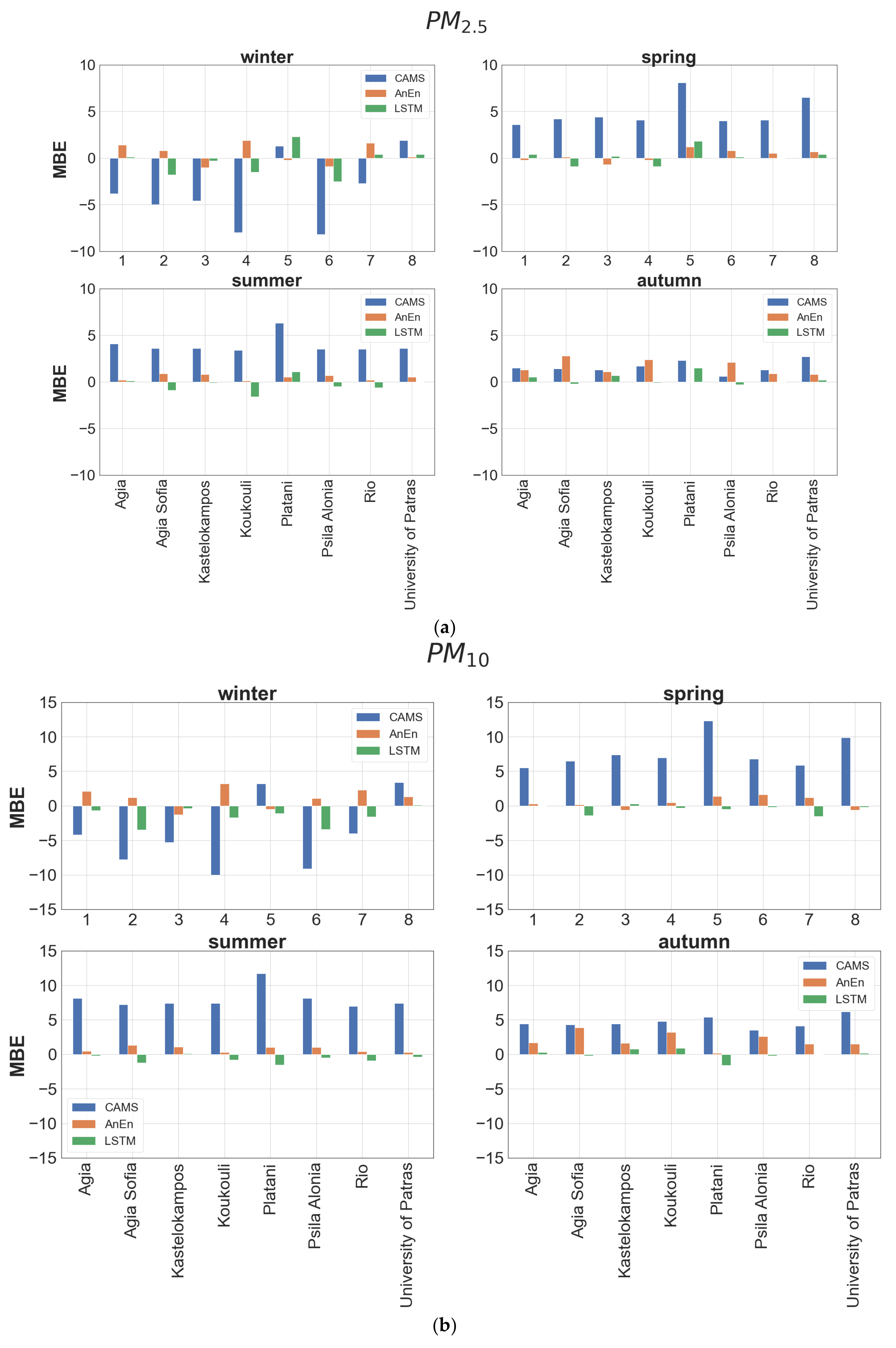
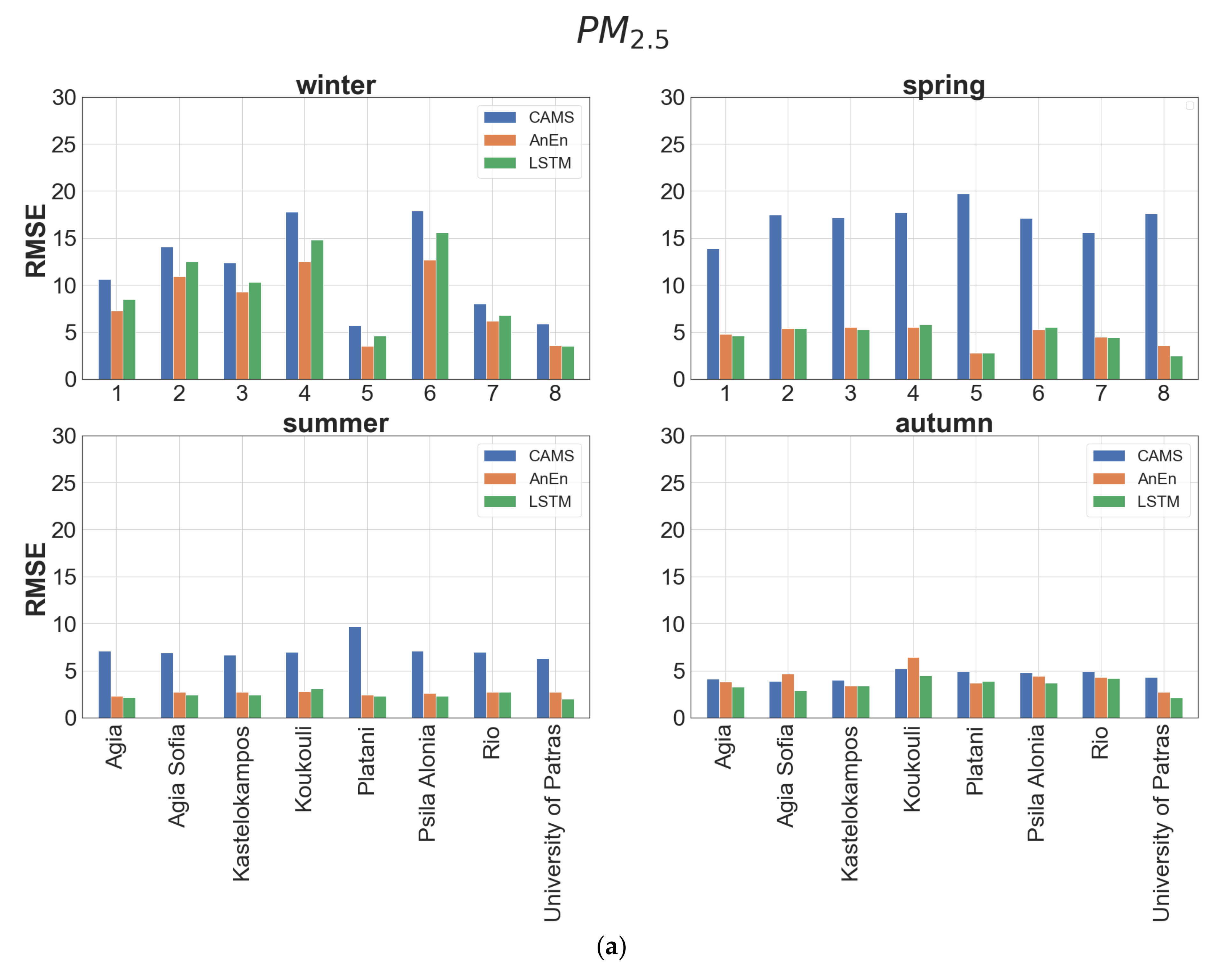
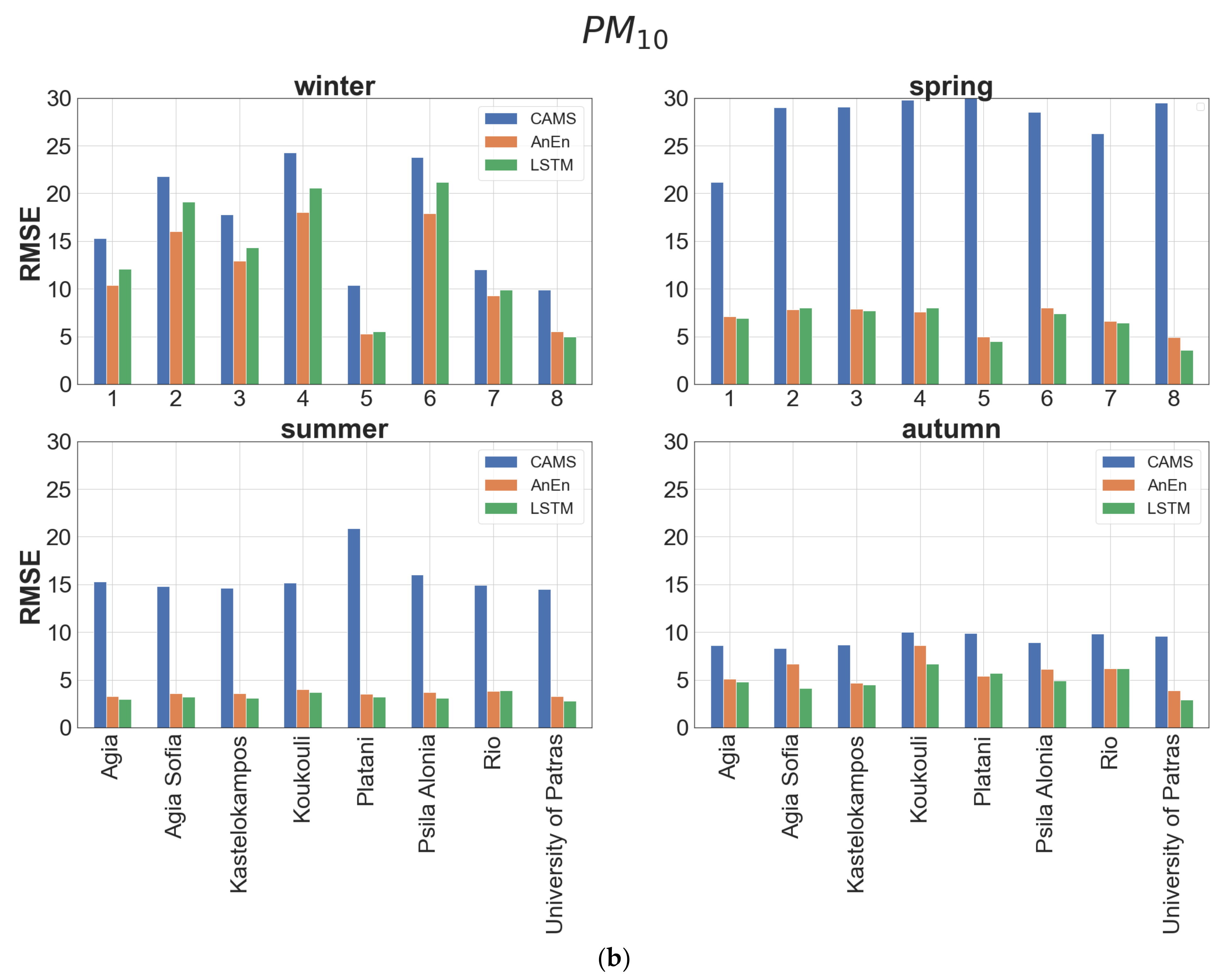
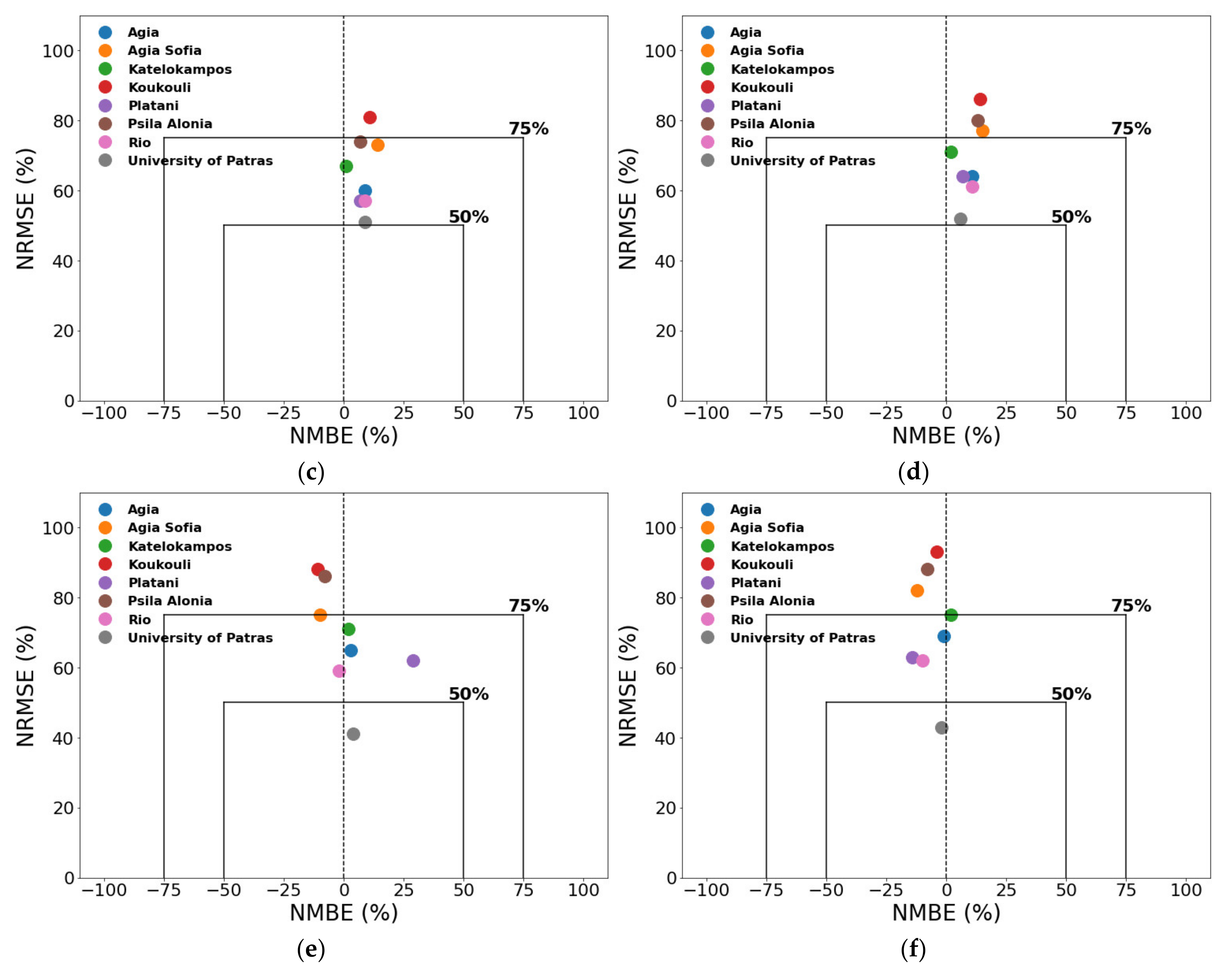
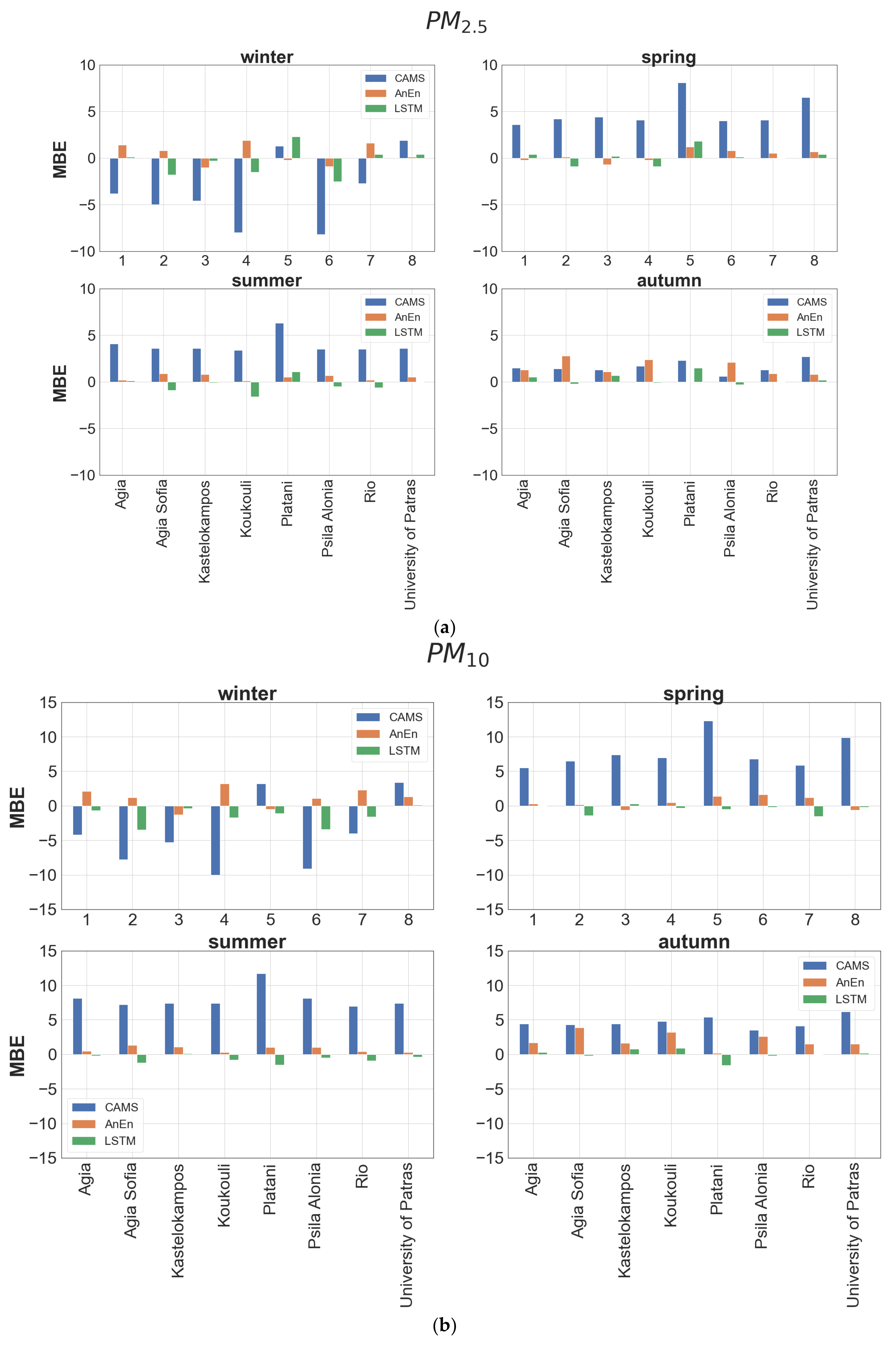
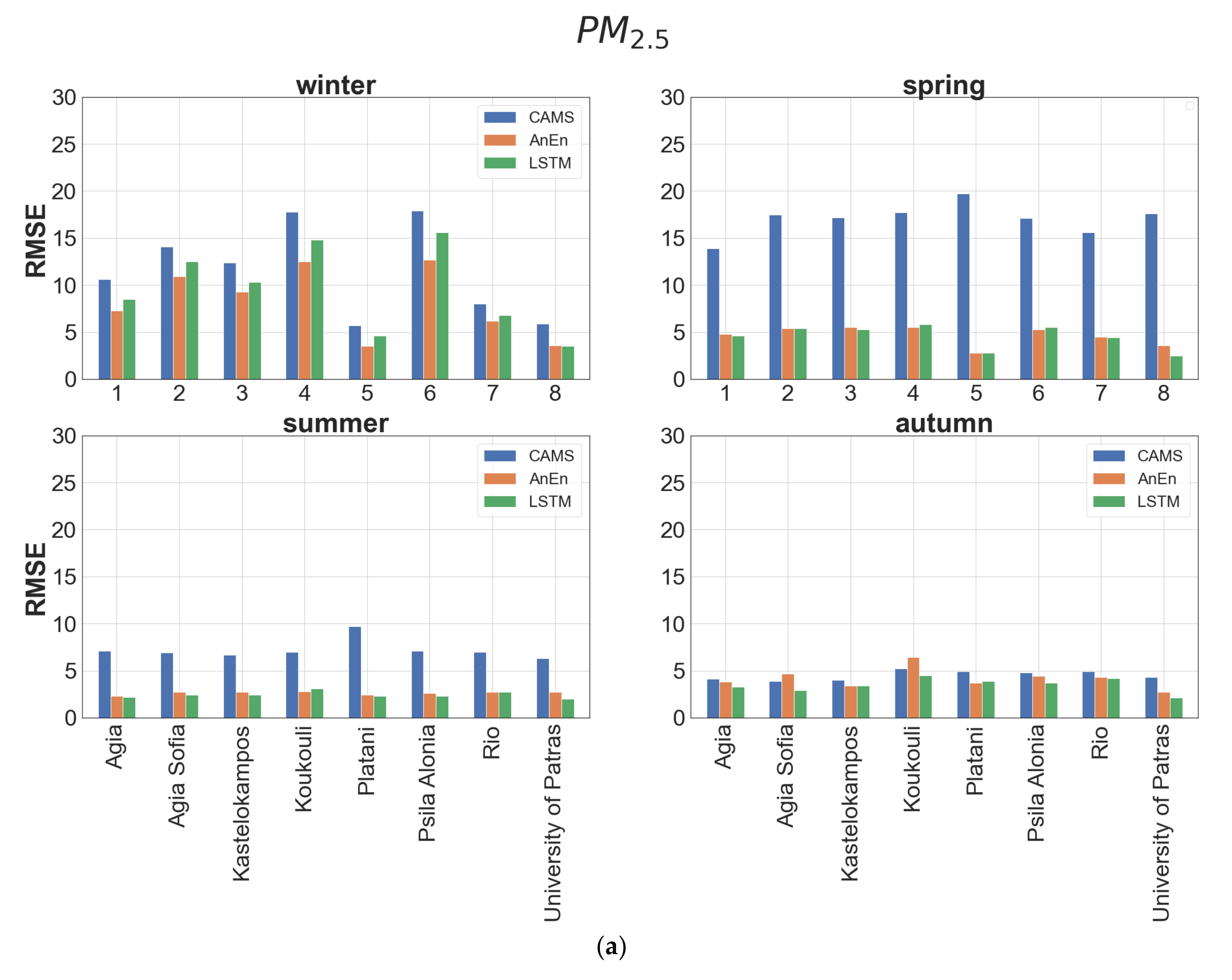
3.4.3. Error Indices
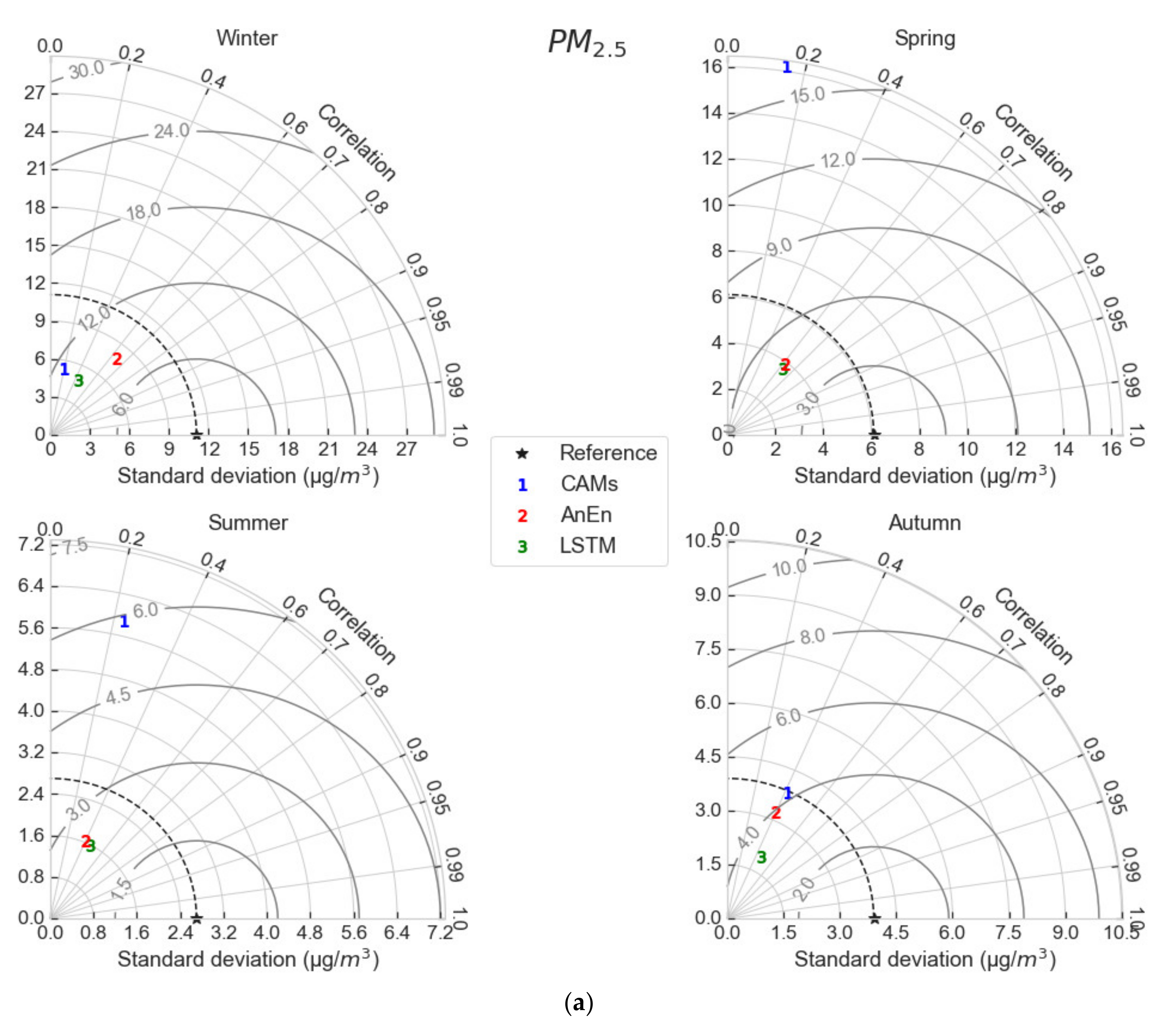
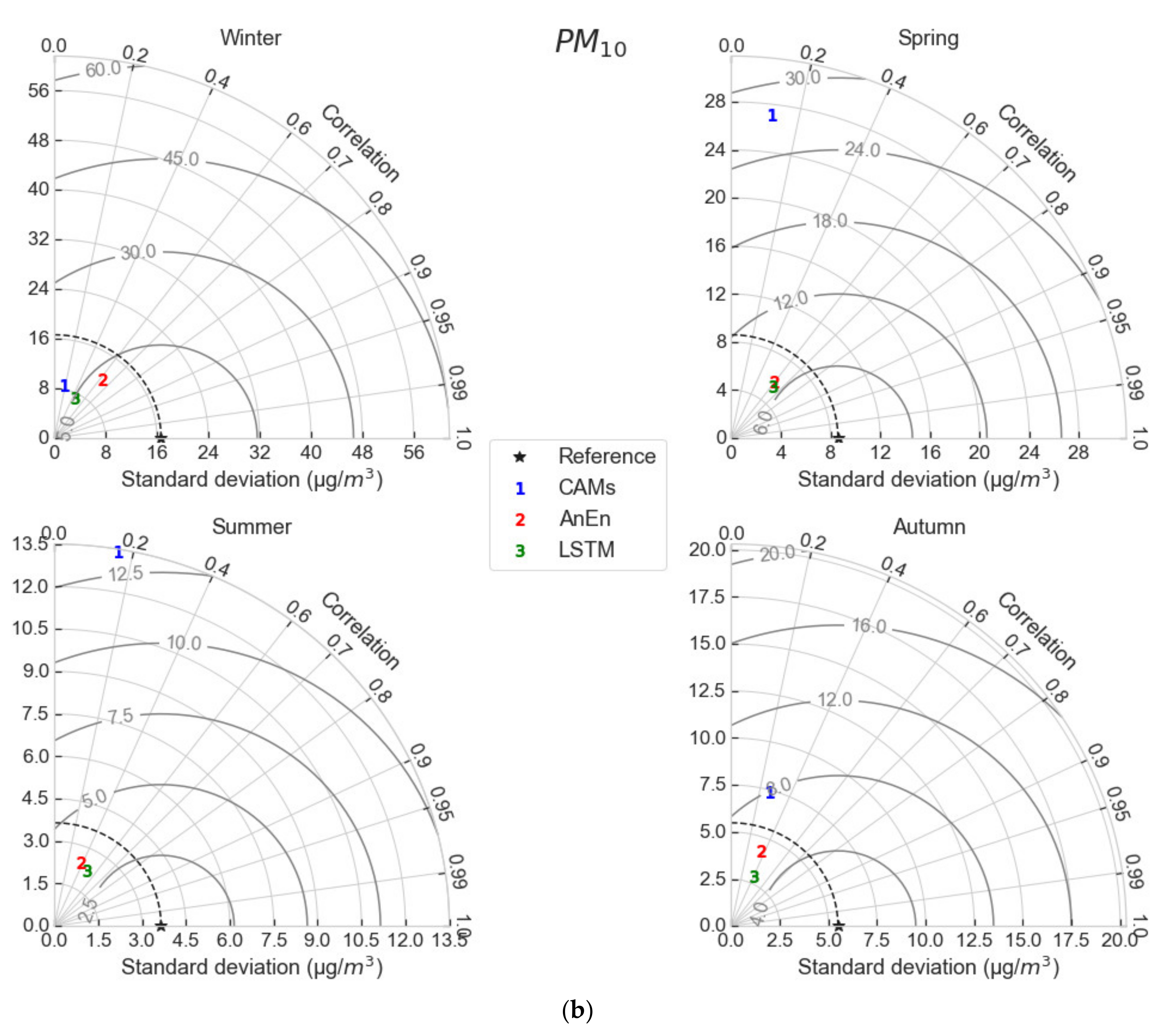
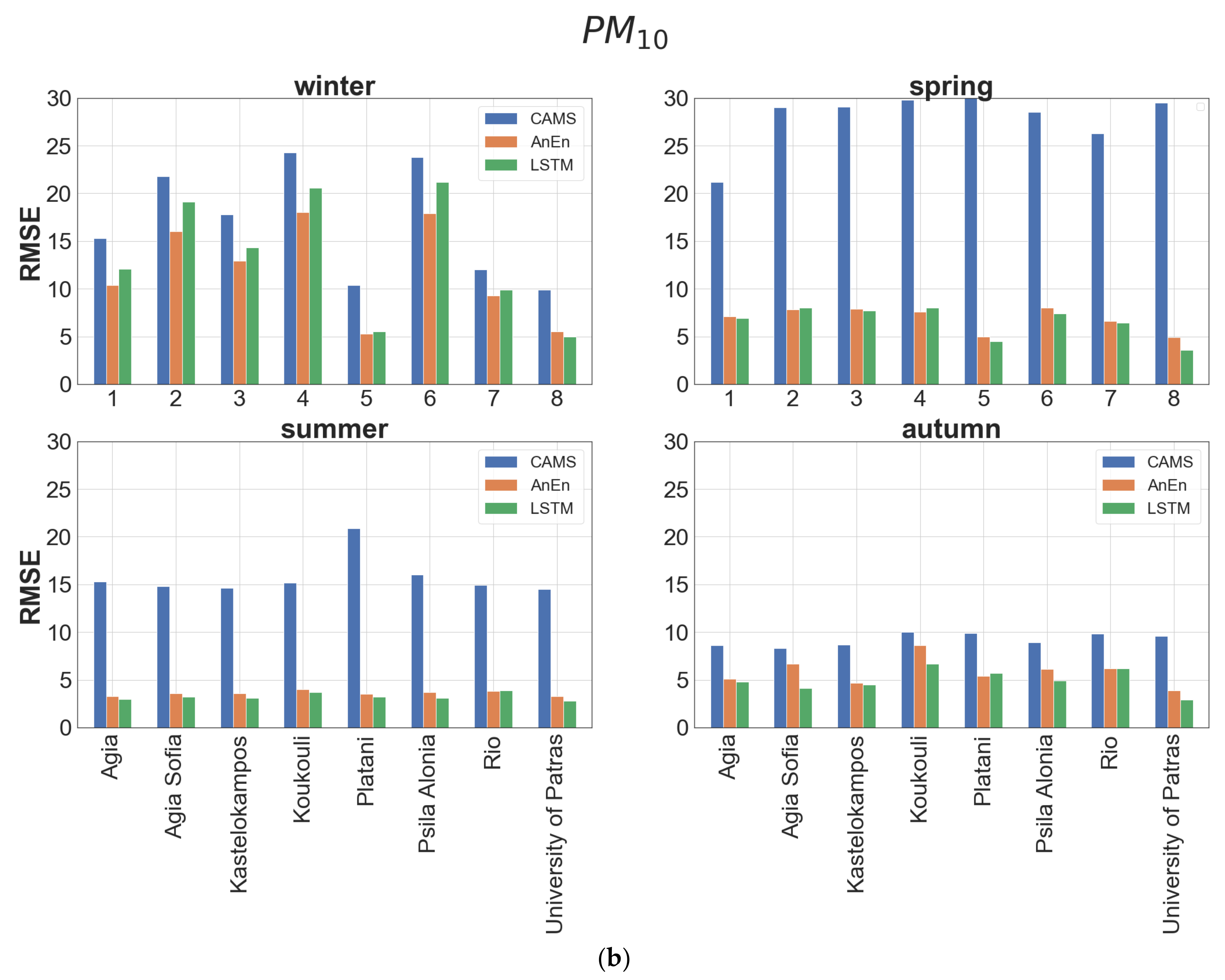
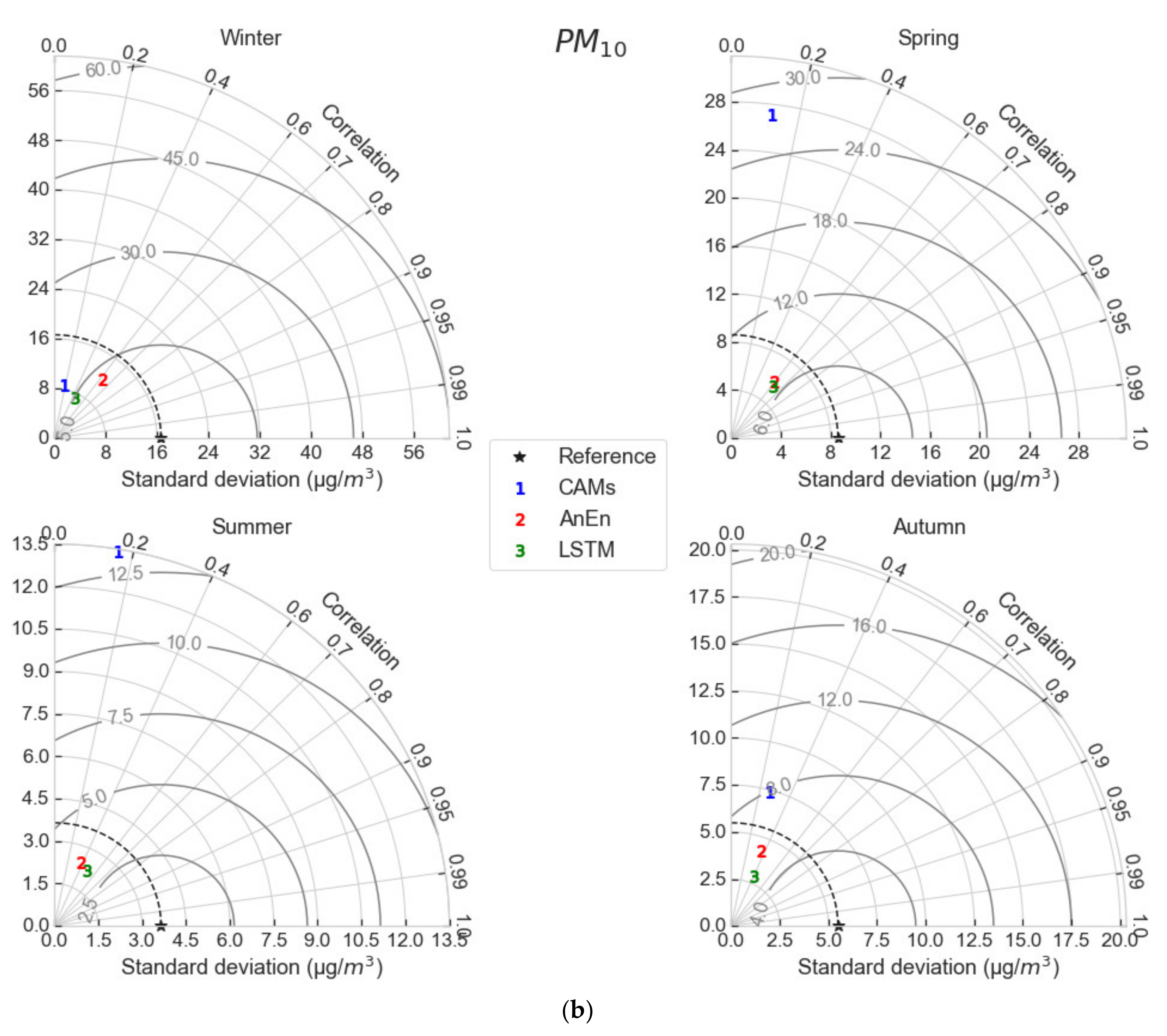
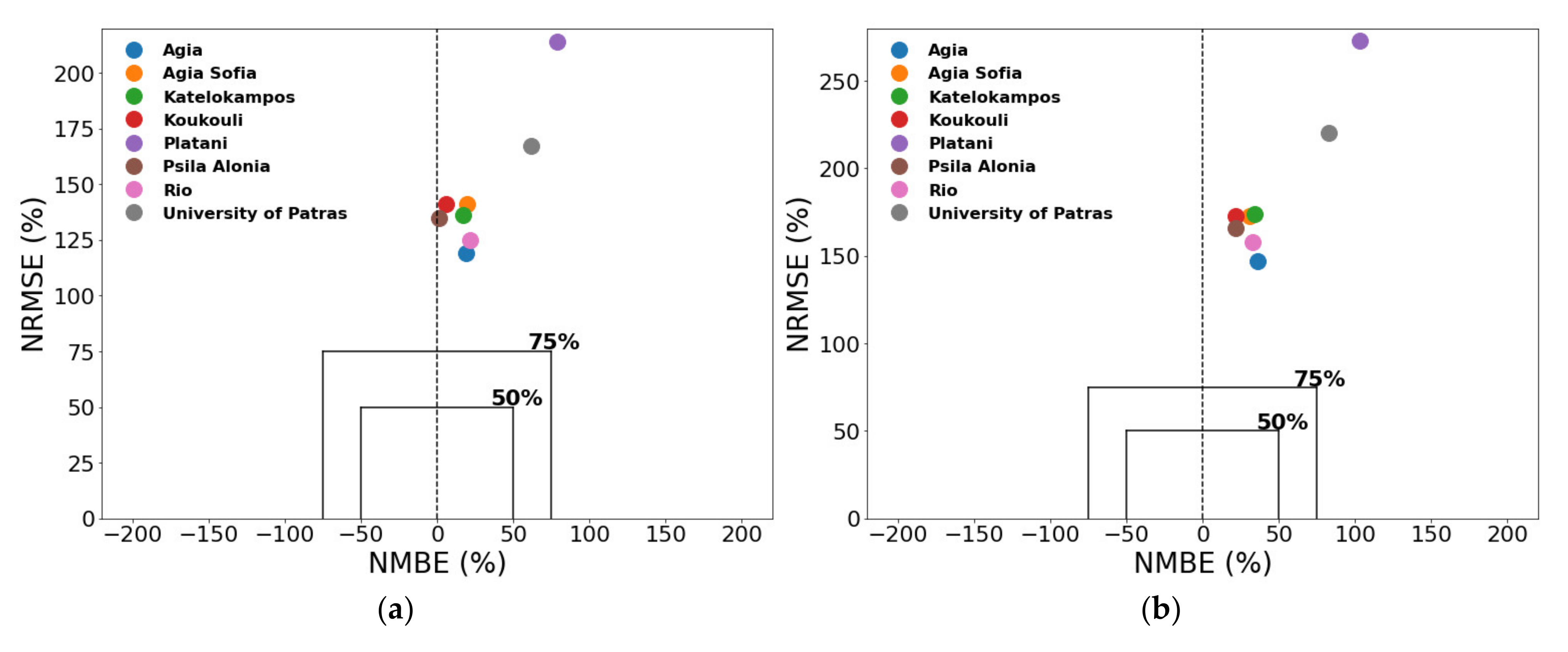
3.4.4. Taylor & Soccer Plots
3.4.5. Extremes
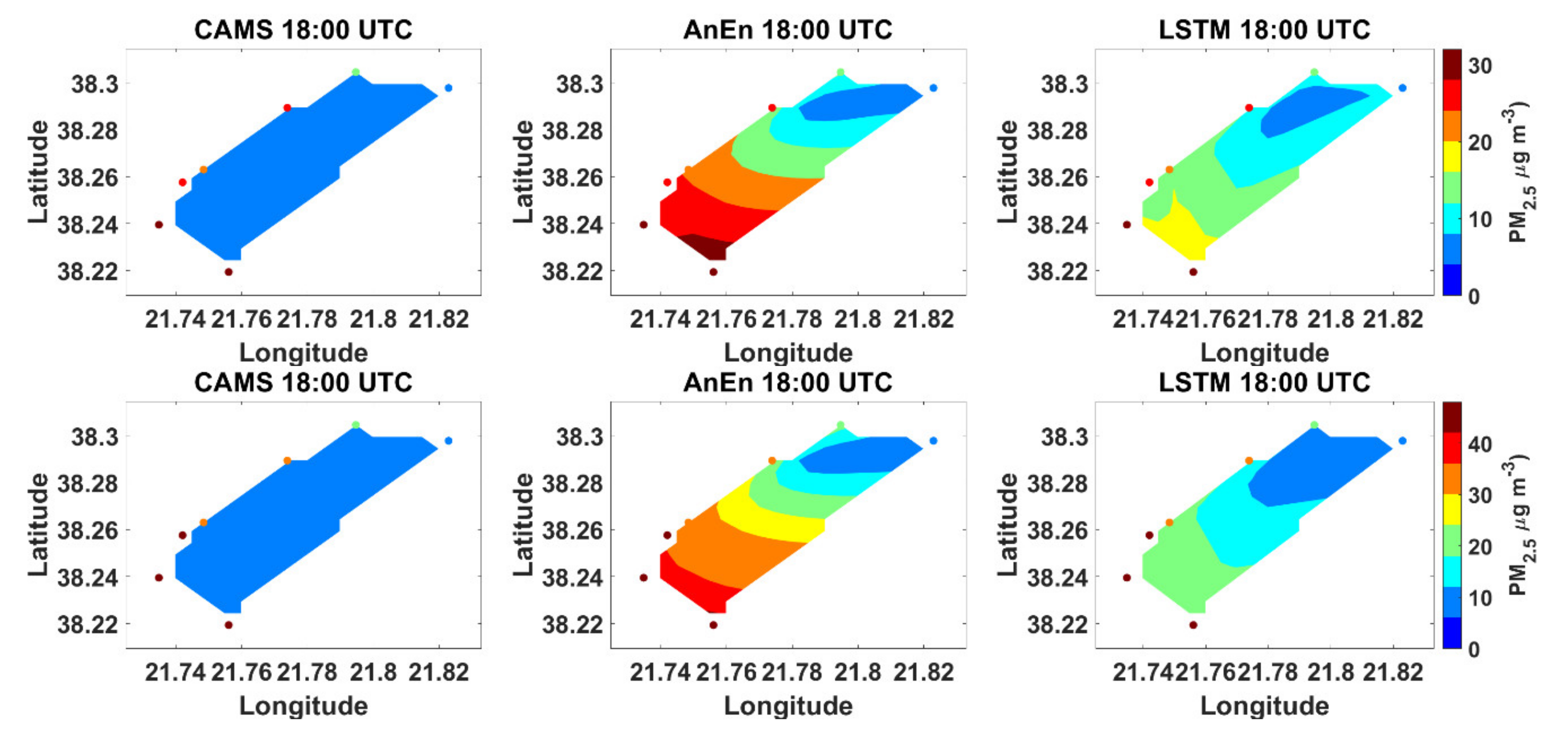
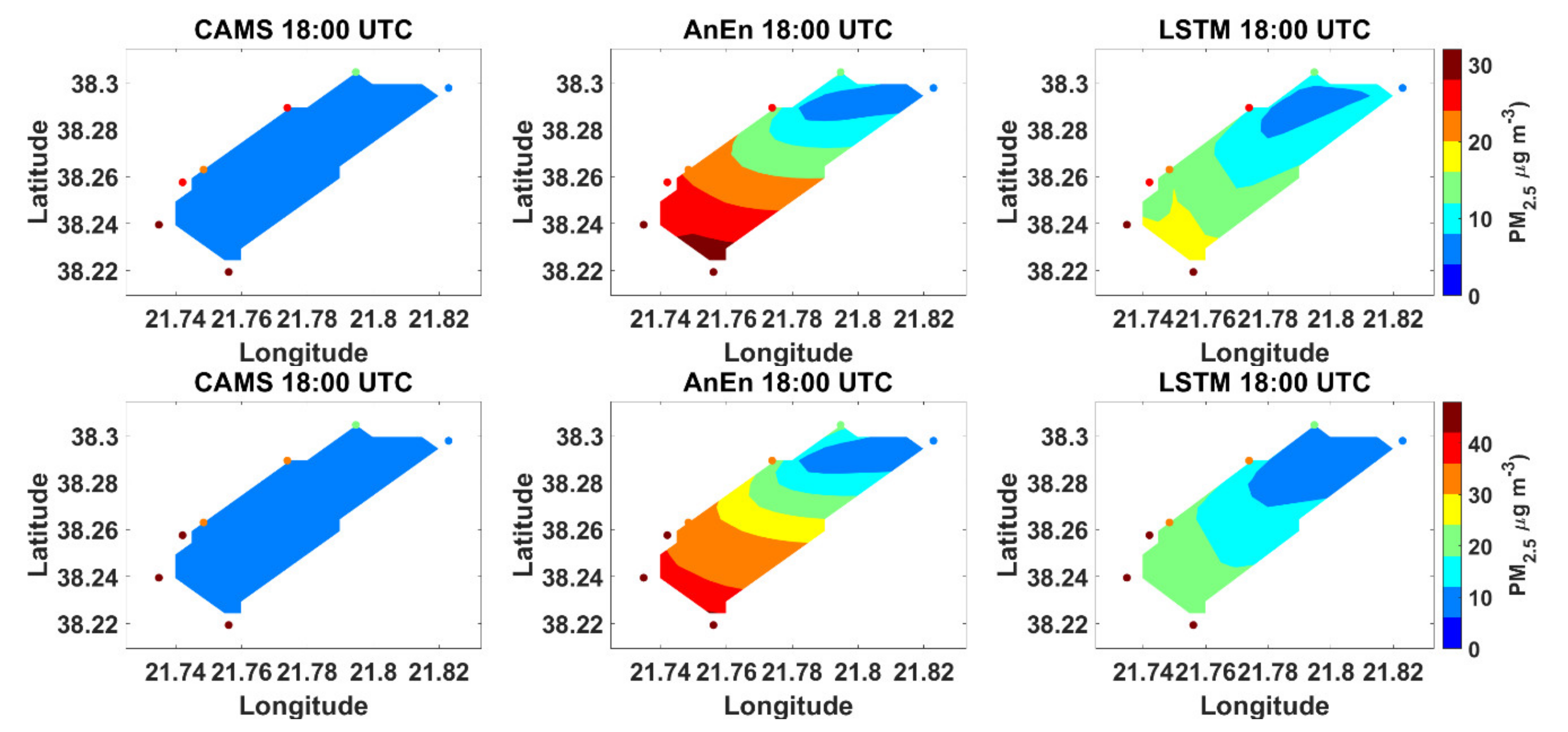
3.4.6. Forecast Maps
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brauer, M.; Amann, M.; Burnett, R.T.; Cohen, A.; Dentener, F.; Ezzati, M.; Henderson, S.B.; Krzyzanowski, M.; Martin, R.V.; Van Dingenen, R.; et al. Exposure assessment for estimation of the global burden of disease attributable to outdoor air pollution. Env. Sci. Technol. 2012, 46, 652–660. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- WHO. Review of Evidence on Health Aspects of Air Pollution—REVIHAAP Project: Technical Report; WHO: Copenhagen, Denmark, 2013; p. 302. [Google Scholar]
- Lelieveld, J.; Evans, J.S.; Fnais, M.; Giannadaki, D.; Pozzer, A. The contribution of outdoor air pollution sources to premature mortality on a global scale. Nature 2015, 525, 367–371. [Google Scholar] [CrossRef] [PubMed]
- Pope, C.A.; Dockery, D.W.; Schwartz, J. Review of Epidemiological Evidence of Health Effects of Particulate Air Pollution. Inhal. Toxicol. 1995, 7, 1–18. [Google Scholar] [CrossRef]
- Pope III, C.A.; Burnett, R.T.; Thun, M.J.; Calle, E.E.; Krewski, D.; Ito, K.; Thurston, G.D. Lung Cancer, Cardiopulmonary Mortality, and Long-term Exposure to Fine Particulate Air Pollution. JAMA 2002, 287, 1132–1141. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Urch, B.; Brook, J.R.; Wasserstein, D.; Brook, R.D.; Rajagopalan, S.; Corey, P.; Silverman, F. Relative Contributions of PM2.5 Chemical Constituents to Acute Arterial Vasoconstriction in Humans. Inhal. Toxicol. 2014, 16, 345–352. [Google Scholar] [CrossRef] [PubMed]
- EEA. Air Quality in Europe—2019 Report; EEA Report No 10/2019; European Environment Agency: Copenhagen, Danmark, 2019; Available online: https://www.eea.europa.eu/publications/air-quality-in-europe-2019 (accessed on 20 January 2021).
- Li, L.; Zhang, J.H.; Qiu, W.Y.; Wang, J.; Fang, Y. An Ensemble Spatiotemporal Model for Predicting PM2.5 Concentrations. Int. J. Environ. Res. Public Health 2017, 14, 549. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Salnikov, V.G.; Karatayev, M.A. Impact of air pollution on human health: Focusing on Rudnyi Altay industrial area. Am. J. Environ. Sci. 2011, 7, 286–294. [Google Scholar] [CrossRef]
- CAMS. Available online: https://atmosphere.copernicus.eu/data (accessed on 28 December 2020).
- ECMWF. Available online: https://www.ecmwf.int/en/about/media-centre (accessed on 28 December 2020).
- Kalnay, E. Atmospheric Modelling, Data Assimilation and Predictability; Cambridge University Press: Cambridge, UK, 2003; p. 341. [Google Scholar]
- Kioutsioukis, I.; Melas, D.; Zerefos, C.; Ziomas, I. Efficient Sensitivity Computations in 3D Air Quality Models. Comput. Phys. Commun. 2005, 167, 23–33. [Google Scholar] [CrossRef]
- Zhang, Y.; Seigneur, C.; Bocquet, M.; Mallet, V.; Baklanov, A. Real-Time Air Quality Forecasting, Part II: State of the Science, Current Research Needs, and Future Prospects. Atmos. Environ. 2012, 60, 656–676. [Google Scholar] [CrossRef]
- Borrego, C.; Monteiro, A.; Pay, M.T.; Ribeiro, I.; Miranda, A.I.; Basart, S.; Baldasano, J.M. How bias-correction can improve air quality forecasts over Portugal. Atmos. Environ. 2011, 45, 6629–6641. [Google Scholar] [CrossRef] [Green Version]
- Delle Monache, L.; Nipen, T.; Liu, Y.; Roux, G.; Stull, R. Kalman filter and analog schemes to postprocess numerical weather predictions. Mon. Weather Rev. 2011, 139, 3554–3570. [Google Scholar] [CrossRef] [Green Version]
- Kioutsioukis, I.; Galmarini, S. De praeceptis ferendis: Good practice in multi-model ensembles. Atmos. Chem. Phys. 2014, 14, 11791–11815. [Google Scholar] [CrossRef] [Green Version]
- Kioutsioukis, I.; Im, U.; Solazzo, E.; Bianconi, R.; Badia, A.; Balzarini, A.; Baró, R.; Bellasio, R.; Brunner, D.; Chemel, C.; et al. Insights into the deterministic skill of air quality ensembles from the analysis of AQMEII data. Atmos. Chem. Phys. 2016, 16, 15629–15652. [Google Scholar] [CrossRef] [Green Version]
- Delle Monache, L.; Eckel, F.A.; Rife, D.L.; Nagarajan, B.; Searight, K. Probabilistic weather prediction with an analog ensemble. Mon. Weather Rev. 2013, 141, 141,3498–516. [Google Scholar] [CrossRef] [Green Version]
- Delle Monache, L.; Alessandrini, S.; Djalalova, I.; Wilczak, J.; Knievel, J.C.; Kumar, R. Improving Air Quality Predictions over the United States with an Analog Ensemble. Weather Forecast 2020, 35, 2145–2162. [Google Scholar] [CrossRef] [Green Version]
- Djalalova, I.; Delle Monache, L.; Wilczak, J. PM2.5 analog forecast and Kalman filtering post-processing for the Community Multiscale Air Quality (CMAQ) model. Atmos. Environ. 2015, 119, 431–442. [Google Scholar] [CrossRef] [Green Version]
- Hamill, T.M.; Whitaker, J.S. Probabilistic quantitative precipitation forecasts based on reforecast analogs: Theory and application. Mon. Weather Rev. 2006, 134, 3209–3229. [Google Scholar] [CrossRef]
- Qi, Z.; Wang, T.; Song, G.; Hu, W.; Li, X.; Zhang, Z. Deep air learning: Interpolation, prediction, and feature analysis of fine-grained air quality. IEEE Trans. Knowl. Data Eng. 2018, 30, 2285–2297. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wang, Y.; Gao, M.; Ma, Q.; Zhao, J.; Zhang, R.; Wang, Q.; Huang, L. A Predictive Data Feature Exploration-Based Air Quality Prediction Approach. IEEE Access 2019, 7, 30732–30743. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. J. Neural. Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Feenstra, B.; Papapostolou, V.; Hasheminassab, S.; Zhang, H.; Der Boghossian, B.; Cocker, D.; Polidori, A. Performance evaluation of twelve low-cost PM2.5 sensors at an ambient air monitoring site. Atmos. Environ. 2019, 216, 116946. [Google Scholar] [CrossRef]
- Kosmopoulos, G.; Salamalikis, V.; Pandis, S.N.; Yannopoulos, P.; Bloutsos, A.A.; Kazantzidis, A. Low-cost sensors for measuring airborne particulate matter Field evaluation and calibration at a South-Eastern European site. Sci. Total Environ. 2020, 748, 141396. [Google Scholar] [CrossRef] [PubMed]
- Pope, F.D.; Gatari, M.; Ng’ang’a, D.; Poynter, A.; Blake, R. Airborne particulate matter monitoring in Kenya using calibrated low-cost sensors. Atmos. Chem. Phys. 2018, 18, 15403–15418. [Google Scholar] [CrossRef] [Green Version]
- Collins, F.C., Jr. A Comparison of Spatial Interpolation Techniques in Temperature Estimation. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 1995. [Google Scholar]
- Lu, G.Y.; Wong, D.W. An adaptive inverse-distance weighting spatial interpolation technique. Comput. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Seinfeld, J.H.; Pandis, S.N. Atmospheric Chemistry and Physics: From Air Pollution to Climate Change; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Liu, C.N.; Lin, S.F.; Tsai, C.J.; Wu, Y.C.; Chen, C.F. Theoretical model for the evaporation loss of PM2.5, during filter sampling. Atmos. Environ. 2015, 109, 79–86. [Google Scholar] [CrossRef]
- Mu, C.Y.; Tu, Y.Q.; Feng, Y. Effect analysis of meteorological factors on the inhalable particle matter concentration of atmosphere in Hami. Meteorol. Environ. Sci. 2011, 34, 75–79. [Google Scholar]
- Lin, J.; Liu, W.; Yan, I. Relationship between meteorological conditions and particle size distribution of atmospheric aerosols. J. Meteorol. Environ. 2009, 25, 1–5. [Google Scholar]
- Giri, D.; Venkatappa, K.; Adhikary, P. The Influence of Meteorological Conditions on PM10 Concentrations in Kathmandu Valley. Int. J. Environ. Res. 2008, 2, 49–60. [Google Scholar]
- Alessandrini, S.; Delle Monache, L.; Sperati, S.; Nissen, J.N. A novel application of an analog ensemble for short-term wind power forecasting. Renew. Energy. 2015, 76, 768–781. [Google Scholar] [CrossRef]
- Alessandrini, S.; Delle Monache, L.; Sperati, S.; Cervone, G. An analog ensemble for short-term probabilistic solar power forecast. Appl. Energy 2015, 157, 95–110. [Google Scholar] [CrossRef] [Green Version]
- Delle Monache, L.; Nipen, T.; Deng, X.; Zhou, Y.; Stull1, R. Ozone ensemble forecasts: 2. A Kalman filter predictor bias correction. J. Geophys. Res. 2006, 111, 1–15. [Google Scholar]
- Sperati, S.; Alessandrini, S.; Delle Monache, L. Gridded probabilistic weather forecasts with an analog ensemble. Q. J. R. Meteorol. Soc. 2017, 143, 2874–2885. [Google Scholar] [CrossRef]
- Junk, C.; Delle Monache, L.; Alesandrini, S.; Cervone, G.; Von Bremen, L. Predictor weighting strategies for probabilistic wind power forecasting with an analog ensemble. Meteorol. Z. 2015, 24, 361–379. [Google Scholar] [CrossRef]
- Solomou, E.S.; Pappa, A.; Kioutsioukis, I.; Poupkou, A.; Liora, N.; Kontos, S.; Giannaros, C.; Melas, D. Analog Ensemble technique to post-process WRF-CAMx ozone and particulate matter forecasts. Atmos. Environ. 2021, 256, 118439. [Google Scholar] [CrossRef]
- Mhammedi, Z.; Hellicar, A.; Rahman, A.; Kasfi, K.; Smethurst, P. Recurrent neural networks for one day ahead prediction of stream flow. In Proceedings of the TSAA ’16: Workshop on Time Series Analytics and Applications, Hobart, Australia, 6 December 2016; ACM: New York, NY, USA, 2016; pp. 25–31. [Google Scholar] [CrossRef]
- Hochreiter, S. The vanishing gradient problem during learning recurrent neural nets and problem solutions. Int. J. Uncertain. Fuzziness Knowl. Based Syst. 1998, 6, 107–116. [Google Scholar] [CrossRef] [Green Version]
- Shertinsky, A. Fundamentals of recurrent neural network (RNN) and long short-term memory (LSTM) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.; Lin, L.; Chen, C.-Y.; Tsao, Y.; Yao, T.-H.; Fei, M.-H.; Fang, S.-F. Forecasting Air Quality in Taiwan by Using Machine Learning. Sci. Rep. 2020, 10, 4153. [Google Scholar] [CrossRef]
- Li, X.; Peng, L.; Yao, X.; Cui, S.; Hu, Y.; You, C.; Chi, T. Long short-term memory neural network for air pollutant concentration predictions: Method development and evaluation. Environ. Pollut. 2017, 231, 997–1004. [Google Scholar] [CrossRef]
- Hsu, C.-H.; Cheng, F.Y. Classification of weather patterns to study the influence of meteorological characteristics on PM2.5 concentrations in yunlin county, taiwan. Atmos. Environ. 2016, 144, 397–408. [Google Scholar] [CrossRef]
- Kaya, K.; Gündüz Öğüdücü, Ş. Deep Flexible Sequential (DFS) Model for Air Pollution Forecasting. Sci. Rep. 2020, 10, 3346. [Google Scholar] [CrossRef]
- Joliffe, I.T.; Stephenson, D.B. Forecast. Verification; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Wilks, D. Statistical Methods in the Atmospheric Sciences; Academic Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Taylor, K.E. Summarizing multiple aspects of model performance in a single diagram. J. Geophys. Res. Atmos. 2001, 106, 7183–7192. [Google Scholar] [CrossRef]
- Athira, V.; Geetha, P.; Vinayakumar, R.; Soman, K. Deepairnet: Applying recurrent networks for air quality prediction. Procedia Comput. Sci. 2008, 132, 1394–1403. [Google Scholar]
- Chaudhary, V.; Deshbhratar, A.; Kumar, V.; Paul, D. Time Series Based LSTM Model to Predict Air Pollutant’s Concentration for Prominent Cities In India. 2018. Available online: http://www.philippe-fournier-viger.com/utility_mining_workshop_2018/PAPER1.pdf (accessed on 20 January 2021).
- Kingma, D.P.; Ba, J.A. A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- European Air Quality Index. Available online: https://airindex.eea.europa.eu (accessed on 20 January 2021).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Name | Station Type | PM2.5 (μg/m3) (Annual Average) | PM10 (μg/m3) (Annual Average) |
|---|---|---|---|
| Agia | Urban traffic | 8.4 | 11.3 |
| Agia Sofia | Urban traffic | 9.3 | 12.6 |
| Kastelokampos | Suburban background | 8.8 | 11.3 |
| Koukouli | Urban traffic | 9.8 | 13.2 |
| Platani | Rural | 5.7 | 7.8 |
| Psila Alonia | Urban traffic | 10.1 | 13.3 |
| Rio | Suburban background | 8.3 | 11.6 |
| Univ of Patras | Suburban background | 6.3 | 8.6 |
| PM2.5 | PM10 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Station | Optimum Number of Analogs | PM10 | JDAY | WDAY | RMSE | Optimum Number of Analogs | PM2.5 | JDAY | WDAY | RMSE |
| Agia | 24 | X | 4.8 | 18 | X | X | 6.9 | |||
| Agia Sofia | 12 | Χ | Χ | Χ | 6.7 | 11 | Χ | Χ | Χ | 10 |
| Kastelokampos | 24 | X | 5.7 | 16 | X | X | 8 | |||
| Koukouli | 30 | X | 7.5 | 22 | X | X | 10.6 | |||
| Platani | 29 | X | X | 3.1 | 24 | X | X | 4.8 | ||
| Psila Alonia | 21 | Χ | Χ | 7.2 | 12 | X | Χ | 9.9 | ||
| Rio | 27 | Χ | 4.8 | 24 | X | Χ | 7 | |||
| Univ of Patras | 26 | X | 3.1 | 30 | X | X | 4.4 | |||
| Frequency (%) | 25 | 88 | 38 | 100 | 88 | 25 | ||||
| PM2.5 | PM10 | |||||
|---|---|---|---|---|---|---|
| STATION | CAMs | AnEn | LSTM | CAMs | AnEn | LSTM |
| Agia | 1.5 | 0.7 | 0.3 | 3.8 | 1.1 | −0.1 |
| Agia Sofia | 1.7 | 1.1 | −0.9 | 3.6 | 1.7 | −1.4 |
| Kastelokampos | 1.4 | 0.1 | 0.1 | 3.9 | 0.2 | 0.2 |
| Koukouli | 0.6 | 1.0 | −1.1 | 2.7 | 1.7 | −0.5 |
| Platani | 4.6 | 0.4 | 1.7 | 8.2 | 0.6 | −1.1 |
| Psila Alonia | 0.2 | 0.7 | −0.8 | 2.9 | 1.6 | −1.0 |
| Rio | 1.8 | 0.7 | −0.1 | 3.7 | 1.3 | −1.0 |
| University of Patras | 3.9 | 0.6 | 0.2 | 7.0 | 0.5 | 0.1 |
| Average (absolute) | 2.0 | 0.7 | 0.7 | 4.5 | 1.1 | 0.7 |
| PM2.5 | PM10 | |||||
|---|---|---|---|---|---|---|
| Station | CAMS | AnEn | LSTM | CAMS | AnEn | LSTM |
| Agia | 9.3 | 4.7 | 5.0 | 15.4 | 6.8 | 7.2 |
| Agia Sofia | 11.8 | 5.9 | 6.1 | 20.0 | 8.8 | 9.5 |
| Kastelokampos | 11.5 | 5.6 | 6.0 | 19.4 | 7.9 | 8.3 |
| Koukouli | 12.9 | 6.9 | 8.1 | 21.1 | 10.5 | 11.3 |
| Platani | 12.3 | 3.3 | 3.1 | 21.6 | 5.0 | 5.0 |
| Psila Alonia | 13.1 | 7.0 | 8.1 | 20.7 | 10.0 | 10.9 |
| Rio | 9.9 | 4.5 | 4.4 | 17.3 | 6.6 | 6.7 |
| University of Patras | 10.4 | 3.1 | 2.6 | 18.5 | 4.4 | 3.6 |
| Average | 11.4 | 5.1 | 5.4 | 19.3 | 7.5 | 7.8 |
| POD | FAR | MIS | CSI | |
|---|---|---|---|---|
| PM2.5 ≥ 20 | ||||
| CAMS | 0.06 | 0.95 | 0.94 | 0.03 |
| AnEn | 0.52 | 0.46 | 0.48 | 0.36 |
| LSTM | 0.20 | 0.42 | 0.80 | 0.16 |
| PM10 ≥ 40 | ||||
| CAMS | 0.02 | 0.99 | 0.98 | 0.01 |
| AnEn | 0.40 | 0.48 | 0.60 | 0.30 |
| LSTM | 0.04 | 0.55 | 0.96 | 0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pappa, A.; Kioutsioukis, I. Forecasting Particulate Pollution in an Urban Area: From Copernicus to Sub-Km Scale. Atmosphere 2021, 12, 881. https://doi.org/10.3390/atmos12070881
Pappa A, Kioutsioukis I. Forecasting Particulate Pollution in an Urban Area: From Copernicus to Sub-Km Scale. Atmosphere. 2021; 12(7):881. https://doi.org/10.3390/atmos12070881
Chicago/Turabian StylePappa, Areti, and Ioannis Kioutsioukis. 2021. "Forecasting Particulate Pollution in an Urban Area: From Copernicus to Sub-Km Scale" Atmosphere 12, no. 7: 881. https://doi.org/10.3390/atmos12070881
APA StylePappa, A., & Kioutsioukis, I. (2021). Forecasting Particulate Pollution in an Urban Area: From Copernicus to Sub-Km Scale. Atmosphere, 12(7), 881. https://doi.org/10.3390/atmos12070881