
A Multi-Fidelity Framework for Wildland Fire Behavior Simulations over Complex Terrain

 , ,
, ,
Abstract
1. Introduction
2. Mathematical Model
2.1. Governing Equations
2.2. Subgrid Parameterizations
2.2.1. Subgrid Advection
2.2.2. Filtered Chemical Source Term
Flame Extinction
2.2.3. Unresolved Boundary Fluxes
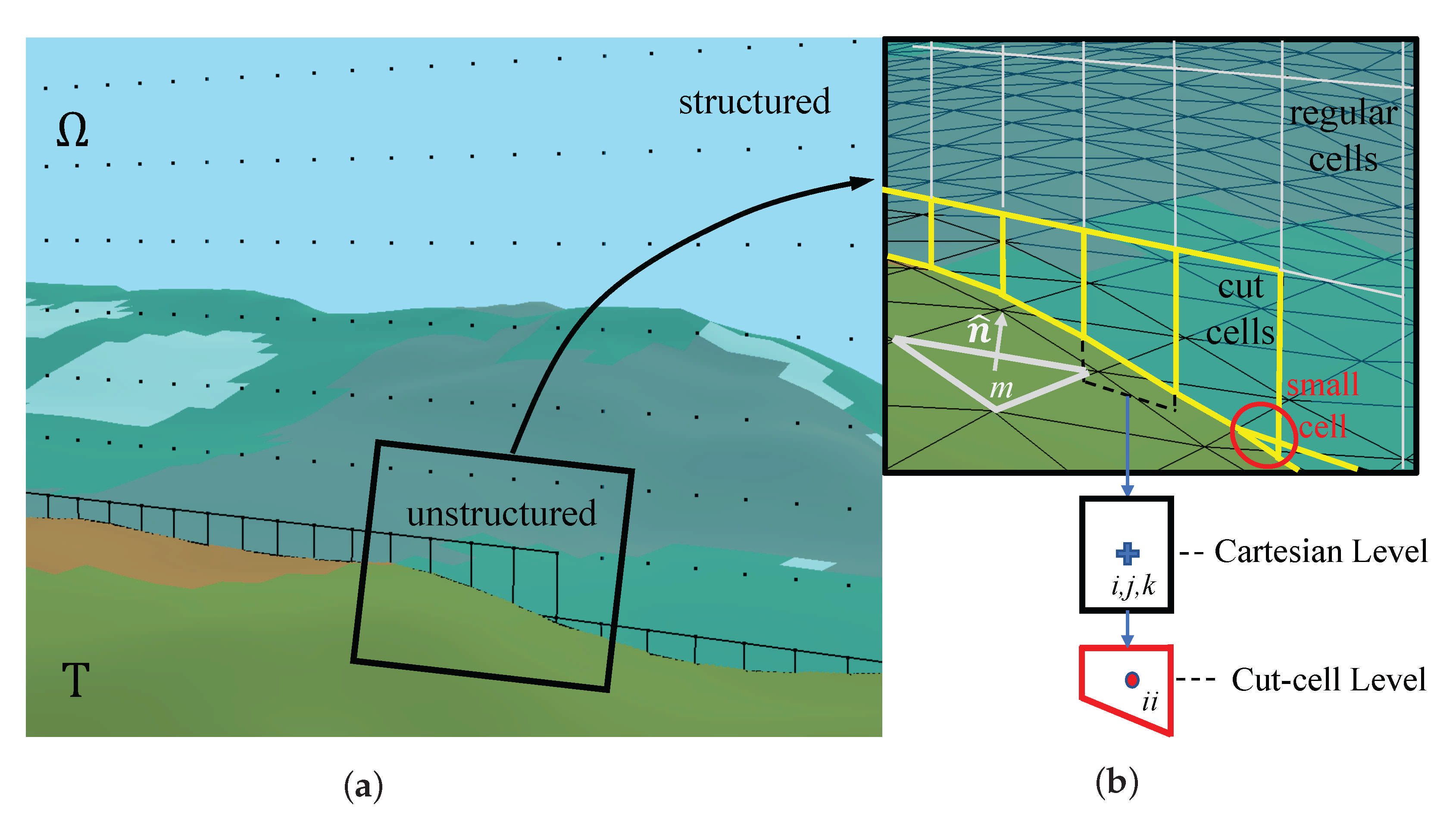
3. Terrain Description and Discretization
3.1. Cut-Cell Scalar Transport and Energy Discretization
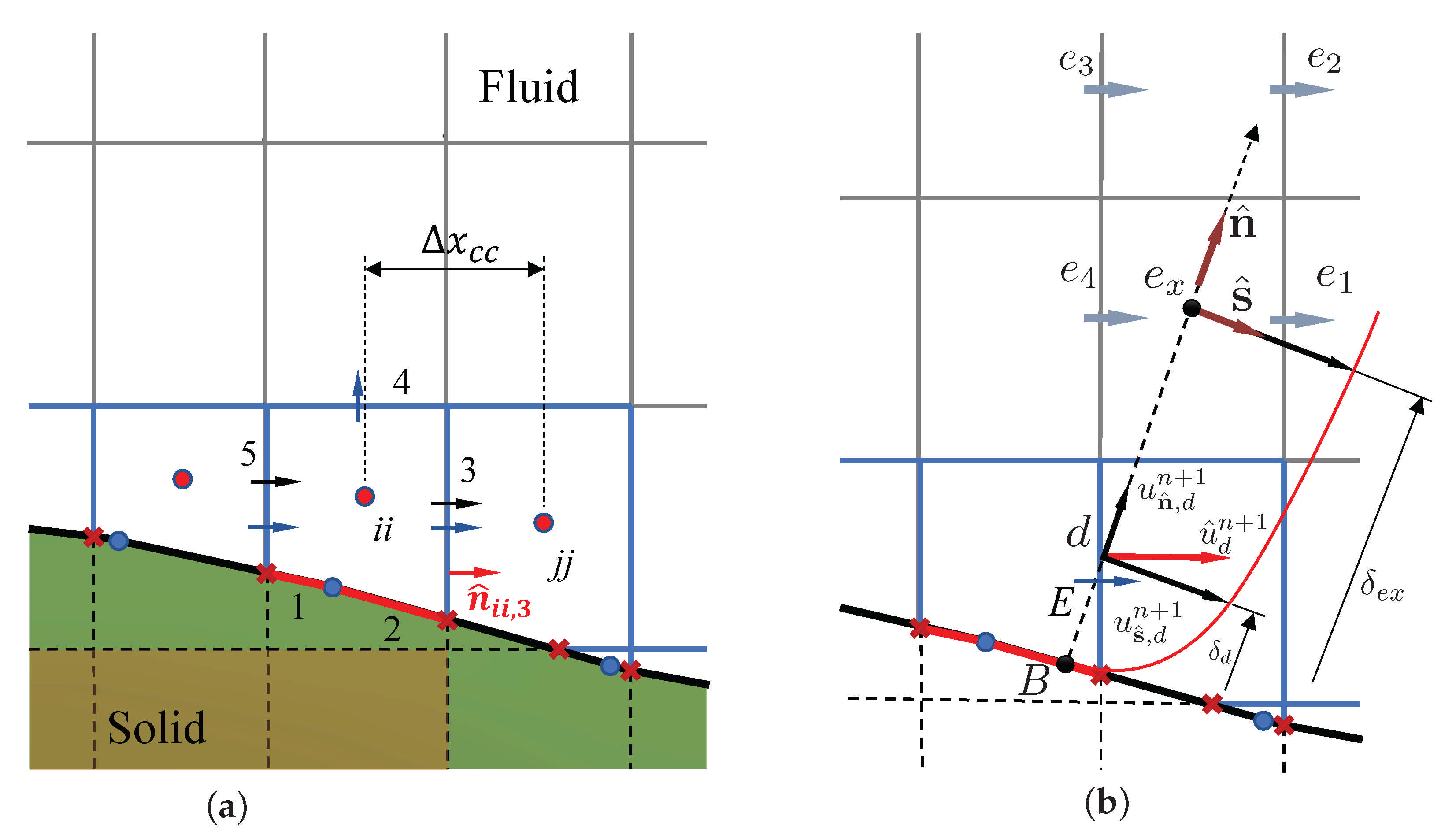
3.2. Immersed Boundary Method and Wall Modeling
- Solve Poisson equation for :
- Obtain final velocity for step:
4. Wildland Fire Spread
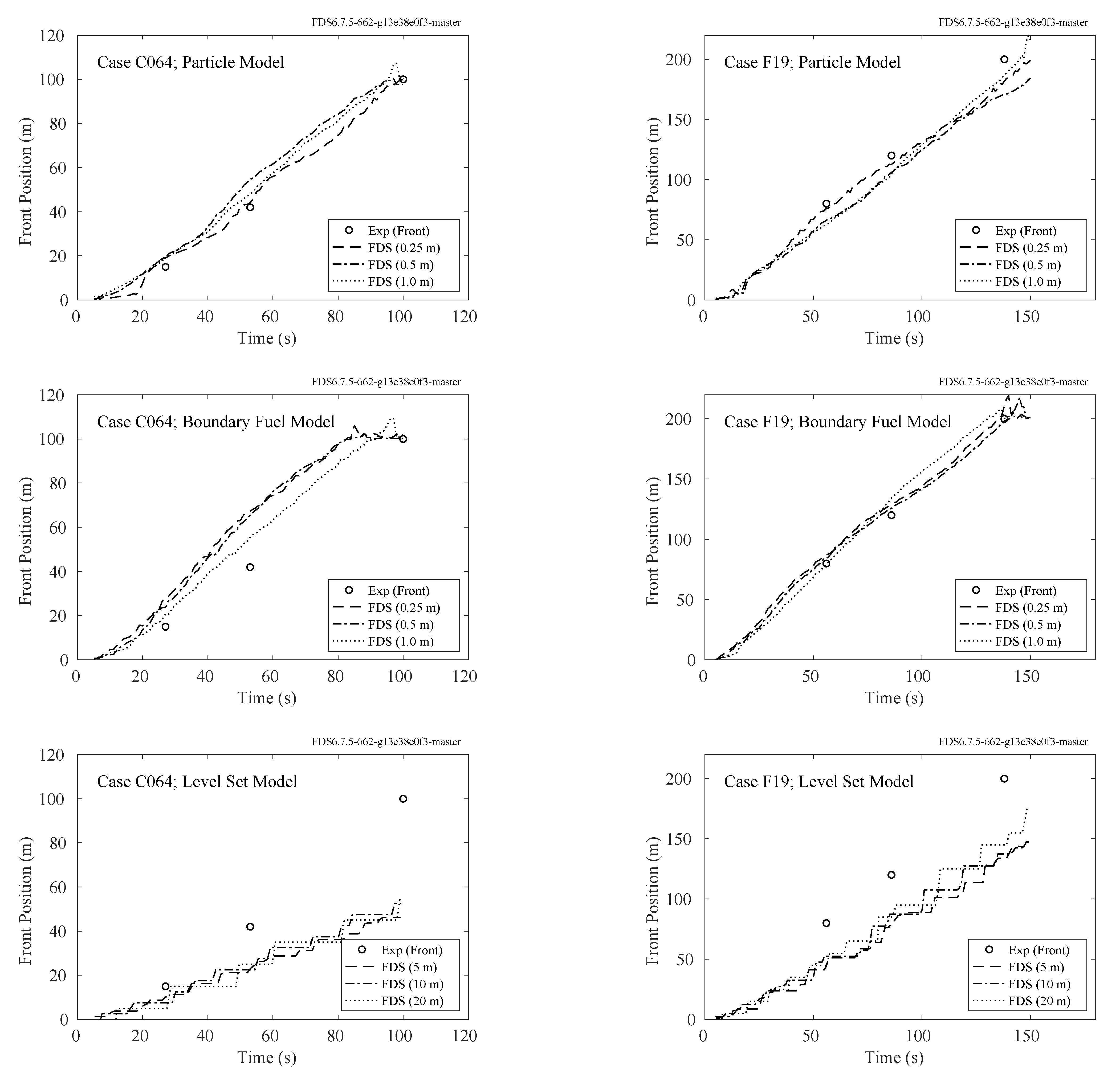
- Particle Model: The vegetation (surface and raised) is represented by a collection of Lagrangian particles that are heated via convection and radiation. This model, with sufficient grid resolution, is appropriate for head, back, and flank surface fires, as well as fire through raised vegetation (e.g., trees). Heat transfer in the volume containing the vegetation is modeled in all three directions. This model is appropriate for grid resolutions of the order of 1 m or less, depending on the size of the flame base and properties of the vegetation (e.g., [49]).
- Boundary Fuel Model: Surface vegetation has its own grid and is modeled like a porous solid with a thickness equal to the height of the vegetation. This model was designed for head fire spread in surface vegetation based on the assumption that heat transfer in the fuel bed is dominated by radiation from the overhead flame, and therefore in the vertical direction. In the implementation here, the height of the surface vegetation is assumed to be unresolved on the grid. The appropriate gas-phase grid resolution of the order is of 1 m to 10 m.
- Level Set Method: The fire-front of a surface fire propagates using purely empirical rules in a level set method. Thermal degradation of the surface vegetation is not modeled. More than one implementation of this method is possible, largely differentiated by how the wind and fire-atmosphere interaction is modeled. The simpler implementations of this model can use grid resolutions that are coarser and 10 m or greater, than the more physics-based particle and boundary fuel models. The level set model can be used for fire spread in the surface vegetation, along with the particle model for fire behavior in raised vegetation.
4.1. Particle Model
4.2. Boundary Fuel Model
4.3. Level Set Model
- Only the level set simulation is performed, with a constant and uniform specified wind and slope. The wind is not affected by the terrain, and there is no fire.
- The wind field is established over the terrain, but it is “frozen” when the fire ignites.
- The wind field follows the terrain, but there is no actual fire in the simulation, just front-tracking. The level set evolves continuously in time with the flow field.
- The wind and fire are fully coupled, and the resulting wind values are used in the head fire spread-rate formula. When the fire-front arrives at a given surface cell, it burns for a finite duration and with a heat release per unit area provided as part of the fuel model.
- The wind and fire are fully coupled in the gas phase, but the head fire spread-rate is not influenced by the wind speed.
5. Atmospheric Wind Boundary Conditions
- (i)
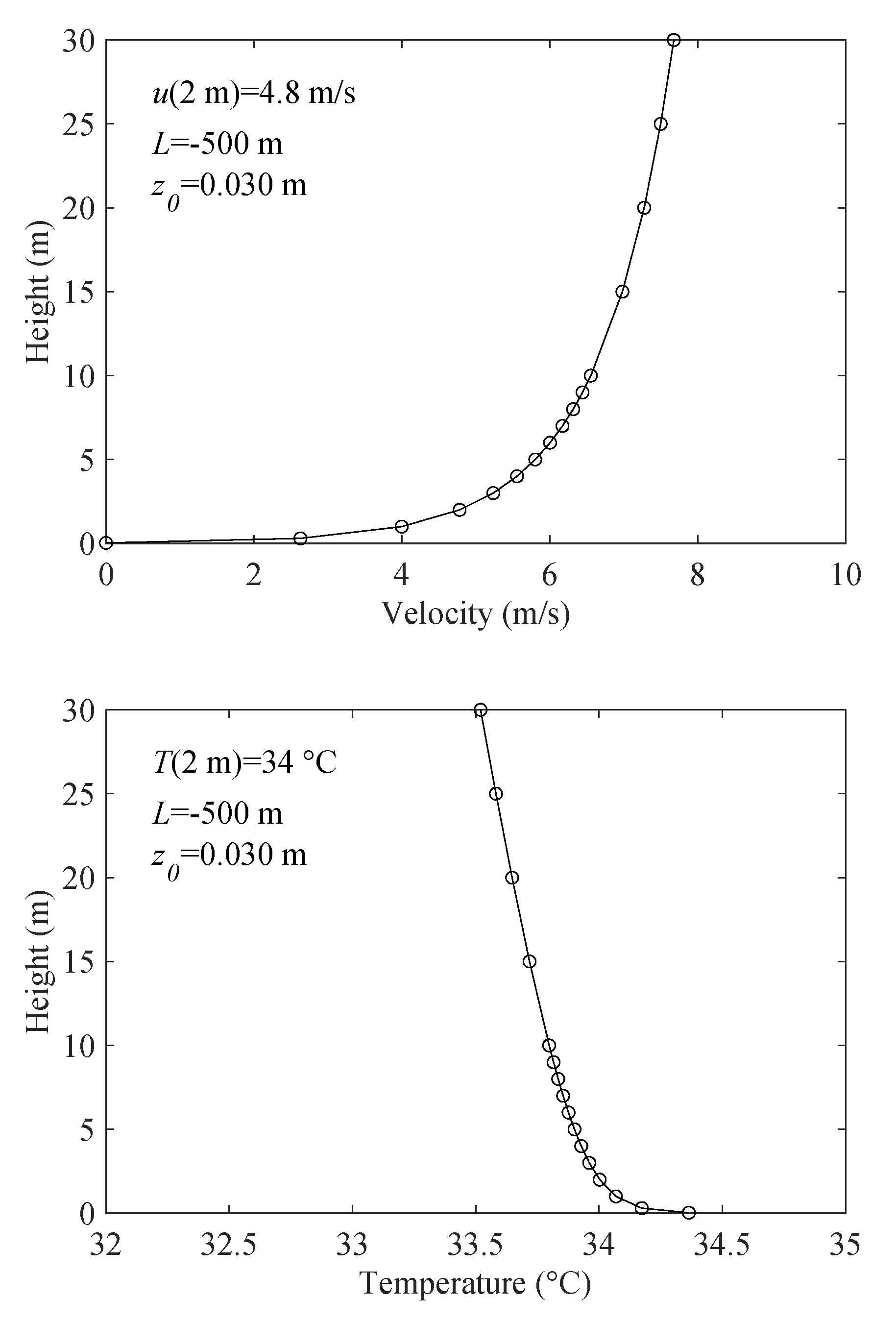
- The specified upstream wind field (vertical profile of streamwise velocity components) based on prescribed Monin-Obukhov parameters imposed on fluid elements entering the domain;
- (ii)
- Optional specification of upstream turbulence based on Jarrin’s synthetic eddy method [58] (which is possible with the code, but not utilized in the test cases within this paper); and
- (iii)
- Nonuniform and nonstationary Dirichlet pressure boundary values for the Poisson equation.
5.1. Velocity and Temperature Profiles
5.2. Pressure Boundary Values
6. Numerical Experiments
6.1. Flat Terrain Fire Spread
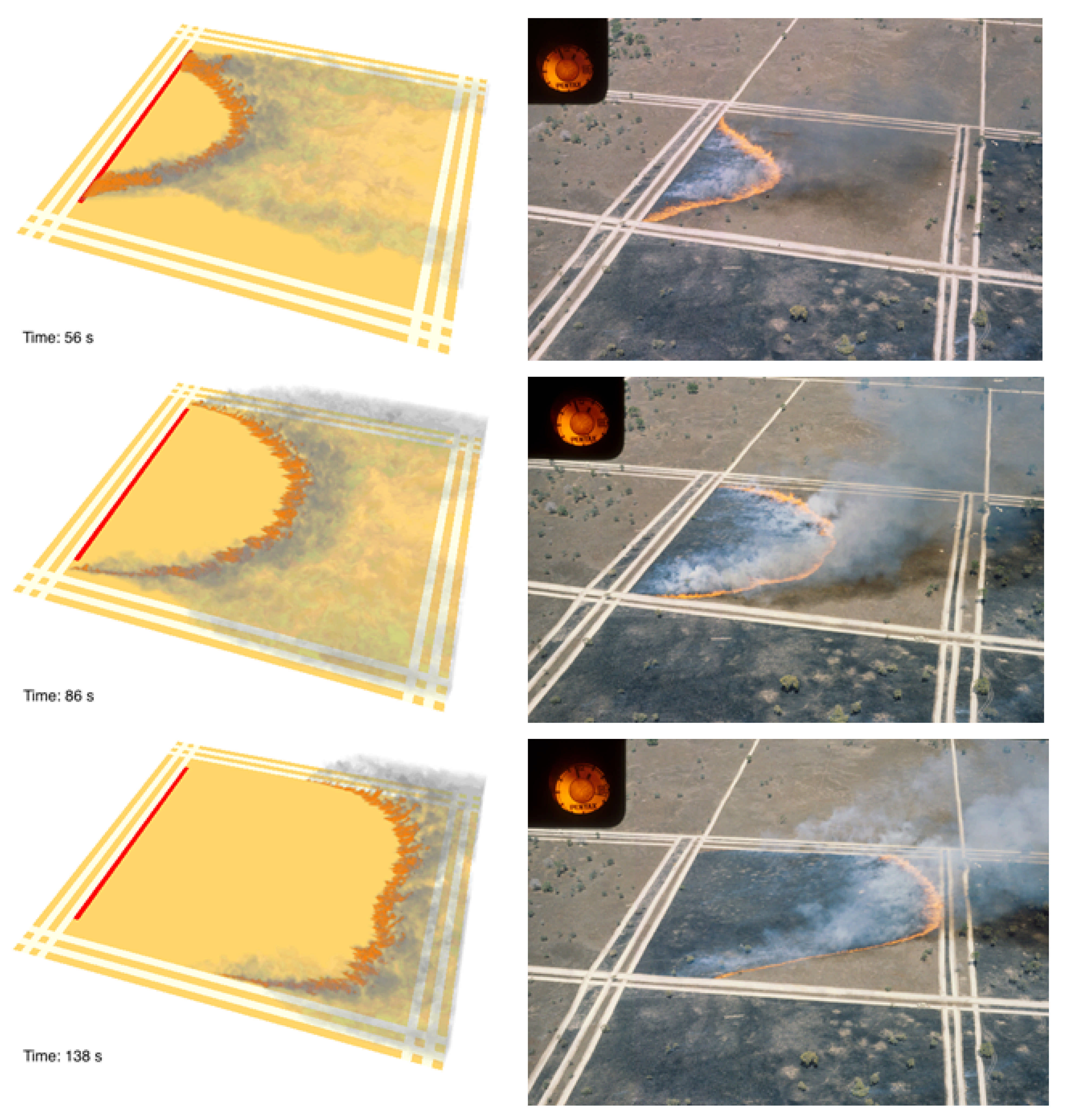
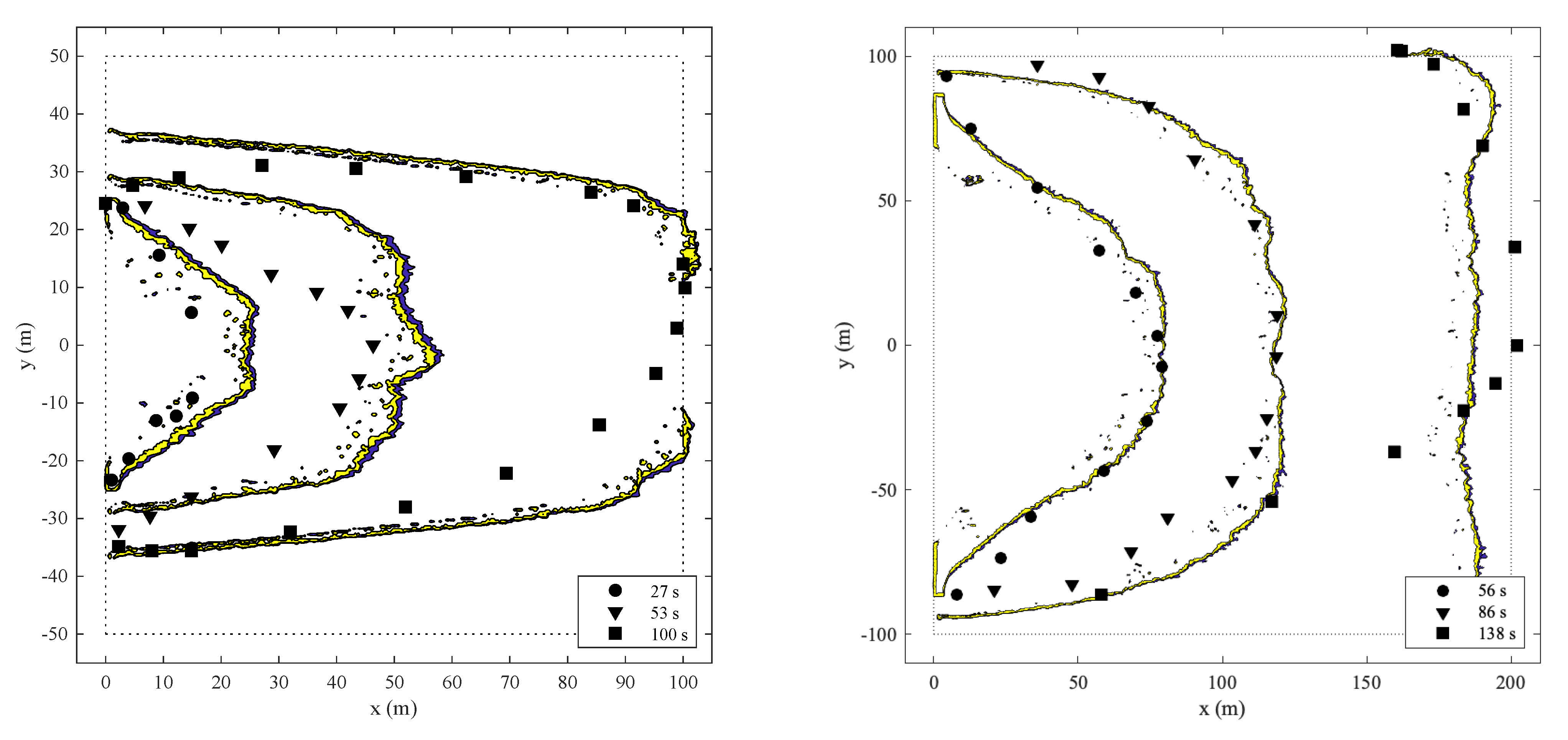
6.2. Complex Terrain Fire Spread
7. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Thomas, D.; Butry, D.; Gilbert, S.; Webb, D.; Fung, J. The Costs and Losses of Wildfires: A Literature Review; Special Publication NIST SP-1215; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2017. Available online: https://www.nist.gov/publications/costs-and-losses-wildfires (accessed on 5 February 2021).
- McDermott, R.; Bryner, N.; Heintz, J. Large Outdoor Fire Modeling (LOFM) Workshop Summary Report; Special Publication NIST SP-1245; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2019. Available online: https://www.nist.gov/publications/large-outdoor-fire-modeling-lofm-workshop-summary-report (accessed on 5 February 2021).
- Richards, L.; Brew, N.; Smith, L. 2019–20 Australian Bushfires—Frequently Asked Questions: A Quick Guide; Research Paper Series 2019-20; Parliament of Australia: Canberra, Australia, 2020. Available online: https://parlinfo.aph.gov.au/parlInfo/download/library/prspub/7234762/upload_binary/7234762.pdf (accessed on 5 February 2021).
- Papadopoulos, G.D.; Niovi Pavlidou, F. A Comparative Review on Wildfire Simulators. IEEE Syst. J. 2011, 5, 233–243. [Google Scholar] [CrossRef]
- Bakhshaii, A.; Johnson, E. A review of a new generation of wildfire–atmosphere modeling. Can. J. For. Res. 2019, 49, 565–574. [Google Scholar] [CrossRef]
- Rothermel, R.C. A Mathematical Model for Predicting Fire Spread in Wildland Fuels; Technical Report INT-115; USDA Forest Service: Ogden, UT, USA, 1972. Available online: http://www.treesearch.fs.fed.us/pubs/32533 (accessed on 5 February 2021).
- Anderson, H. Aids to Determining Fuel Models for Estimating Fire Behavior; General Technical Report INT-122; Intermountain Forest and Range Experiment Station, USDA Forest Service: Ogden, UT, USA, 1982. Available online: https://www.fs.usda.gov/treesearch/pubs/6447 (accessed on 5 February 2021).
- Finney, M. Fire Area Simulator–Model, Development and Evaluation; Research Paper RMRS-RP-4 Revised; United States Forest Service, Rocky Mountain Research Station: Missoula, MT, USA, 2004. Available online: http://www.fs.fed.us/rm/pubs/rmrs_rp004.pdf (accessed on 5 February 2021).
- Bova, A.; Mell, W.; Hoffman, C. A comparison of level set and marker methods for the simulation of wildland fire front propagation. Int. J. Wildland Fire 2015, 25, 229–241. [Google Scholar] [CrossRef]
- McGrattan, K.; Hostikka, S.; McDermott, R.; Floyd, J.; Weinschenk, C.; Overholt, K. Fire Dynamics Simulator, User’s Guide, 6th ed.; National Institute of Standards and Technology: Gaithersburg, MD, USA; VTT Technical Research Centre of Finland: Espoo, Finland, 2013. [Google Scholar]
- Coen, J.L. Modeling Wildland Fires: A Description of the Coupled Atmosphere-Wildland Fire Environment Model (CAWFE); Technical Report NCAR/TN500+STR; National Center for Atmospheric Research: Boulder, CO, USA, 2013. [Google Scholar]
- Coen, J.L.; Schroeder, W. The High Park Fire: Coupled weather-wildland fire model simulation of a windstorm-driven wildfire in Colorado’s Front Range. J. Geophys. Res. Atmos. 2015, 120, 131–146. [Google Scholar] [CrossRef]
- Lautenberger, C. Wildland fire modeling with an Eulerian level set method and automated calibration. Fire Saf. J. 2013, 62, 289–298. [Google Scholar] [CrossRef]
- Coen, J.L.; Cameron, M.; Michalakes, J.; Patton, E.G.; Riggan, P.J.; Yedinak, K.M. WRF-Fire: Coupled Weather—Wildland Fire Modeling with the Weather Research and Forecasting Model. J. Appl. Meteorol. Climatol. 2013, 52, 16–38. [Google Scholar] [CrossRef]
- Mandel, J.; Beezley, J.D.; Coen, J.L.; Kim, M. Data assimilation for wildland fires: Ensemble Kalman filters in coupled atmosphere-surface models. IEEE Control Syst. Mag. 2009, 9, 47–65. [Google Scholar]
- Mandel, J.; Beezley, J.D.; Kochanski, A.K. Coupled atmosphere-wildland fire modeling with WRF 3.3 and SFIRE 2011. Geosci. Model Dev. 2011, 4, 591–610. [Google Scholar] [CrossRef]
- Mandel, J.; Amram, S.; Beezley, J.D.; Kelman, G.; Kochanski, A.K.; Kondratenko, V.Y.; Lynn, B.H.; Regev, B.; Vejmelka, M. Recent advances and applications of WRF-SFIRE. Nat. Hazards Earth Syst. Sci. 2015, 14, 2829–2845. [Google Scholar] [CrossRef]
- Kochanski, A.K.; Jenkins, M.A.; Yedinak, K.; Mandel, J.; Beezley, J.; Lamb, B. Toward an integrated system for fire, smoke, and air quality simulations. Int. J. Wildland Fire 2016, 25, 534–546. [Google Scholar] [CrossRef]
- Sethian, J.A. Level Set Methods and Fast Marching Methods: Evolving Interfaces in Computational Geometry, Fluid Mechanics, Computer Vision, and Materials Science; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Osher, S.; Fedkiw, R. Level Set Methods and Dynamic Implicit Surfaces; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Mell, W.; Jenkins, M.; Gould, J.; Cheney, P. A physics-based approach to modelling grassland fires. Int. J. Wildland Fire 2007, 16, 1–22. [Google Scholar] [CrossRef]
- Linn, R.; Winterkamp, J.; Edminster, C.; Colman, J.J.; Smith, W.S. Coupled influences of topography and wind on wildland fire behaviour. Int. J. Wildland Fire 2007, 16, 183–195. [Google Scholar] [CrossRef]
- Arca, B.; Ghisu, T.; Casula, M.; Salis, M.; Duce, P. A web-based wildfire simulator for operational applications. Int. J. Wildland Fire 2019, 28, 99–112. [Google Scholar] [CrossRef]
- Rehm, R.; Baum, H. The Equations of Motion for Thermally Driven, Buoyant Flows. J. Res. NBS 1978, 83, 297–308. [Google Scholar] [CrossRef]
- McDermott, R.; Floyd, J. Enforcing realizability in explicit multi-component species transport. Fire Saf. J. 2015, 78, 180–187. [Google Scholar] [CrossRef] [PubMed][Green Version]
- McDermott, R.J. A velocity divergence constraint for large-eddy simulation of low-Mach flows. J. Comput. Phys. 2014, 274, 413–431. [Google Scholar] [CrossRef]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- McGrattan, K.; Hostikka, S.; McDermott, R.; Floyd, J.; Weinschenk, C.; Overholt, K. Fire Dynamics Simulator, Technical Reference Guide, 6th ed.; Volume 1: Mathematical Model; Volume 2: Verification Guide; Volume 3: Validation Guide; Volume 4: Software Quality Assurance; National Institute of Standards and Technology: Gaithersburg, MD, USA; VTT Technical Research Centre of Finland: Espoo, Finland, 2013. [Google Scholar]
- Poinsot, T.; Veynante, D. Theoretical and Numerical Combustion, 2nd ed.; R.T. Edwards, Inc.: Philadelphia, PA, USA, 2005. [Google Scholar]
- Deardorff, J. Stratocumulus-capped mixed layers derived from a three-dimensional model. Boundary-Layer Meteorol. 1980, 18, 495–527. [Google Scholar] [CrossRef]
- Comte-Bellot, G.; Corrsin, S. Simple Eulerian time correlation of full- and narrow-band velocity signals in grid-generated, ‘isotropic’ turbulence. J. Fluid Mech. 1971, 48, 273–337. [Google Scholar] [CrossRef]
- Bardina, J.; Ferziger, J.H.; Reynolds, W.C. Improved Subgrid Scale Models for Large Eddy Simulation. In Proceedings of the AIAA 13th Fluid & Plasma Dynamics Conference, American Institute of Aeronautics and Astronautics, Snowmass, CO, USA, 14–16 July 1980. [Google Scholar]
- Nicoud, F.; Ducros, F. Subgrid-Scale Stress Modelling Based on the Square of the Velocity Gradient Tensor. Flow Turbul. Combust. 1999, 62, 183–200. [Google Scholar] [CrossRef]
- Maragkos, G.; Merci, B. On the use of dynamic turbulence modelling in fire applications. Comb. Flame 2020, 216, 9–23. [Google Scholar] [CrossRef]
- Mulholland, G. Smoke Production and Properties. In SFPE Handbook of Fire Protection Engineering, 3rd ed.; National Fire Protection Association: Quincy, MA, USA, 2002. [Google Scholar]
- Magnussen, B.; Hjertager, B. On Mathematical Modeling of Turbulent Combustion with Special Emphasis on Soot Formation and Combustion. In Proceedings of the Sixteenth Symposium (International) on Combustion, Combustion Institute, Pittsburgh, PA, USA, 15–20 August 1976; pp. 719–729. [Google Scholar]
- McDermott, R.; McGrattan, K.; Floyd, J. A Simple Reaction Time Scale for Under-Resolved Fire Dynamics. In Proceedings of the Fire Safety Science—10th International Symposium, College Park, MD, USA, 19–24 June 2011; pp. 809–820. [Google Scholar]
- Beyler, C. Flammability Limits of Premixed and Diffusion Flames. In SFPE Handbook of Fire Protection Engineering, 5th ed.; Hurley, M., Ed.; Springer: New York, NY, USA, 2016. [Google Scholar]
- Holman, J. Heat Transfer, 7th ed.; McGraw-Hill: New York, NY, USA, 1990. [Google Scholar]
- Incropera, F.P.; De Witt, D.P. Fundamentals of Heat and Mass Transfer, 4th ed.; John Wiley and Sons: New York, NY, USA, 1996. [Google Scholar]
- Berger, M. Cut Cells: Meshes and Solvers. Handb. Numer. Anal. 2017, 18, 1–22. [Google Scholar]
- Eymard, R.; Gallouet, T.; Herbin, R. Finite volume methods. In Solution of Equation in Rn (Part 3), Techniques of Scientific Computing (Part 3); Handbook of Numerical Analysis; Elsevier: Amsterdam, The Netherlands, 2000; Volume 7, pp. 713–1018. [Google Scholar]
- LeVeque, R. Finite Volume Methods for Hyperbolic Problems; Cambridge Texts in Applied Mathematics; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Balaras, E. Modeling complex boundaries using an external force field on fixed Cartesian grids in large-eddy simulations. Comput. Fluids 2004, 33, 375–404. [Google Scholar] [CrossRef]
- LeVeque, R. Finite Difference Methods for Ordinary and Partial Differential Equations: Steady-State and Time-Dependent Problems; Other Titles in Applied Mathematics; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2007. [Google Scholar]
- Kirkpatrick, M.; Armfield, S.; Kent, J. A representation of curved boundaries for the solution of the Navier–Stokes equations on a staggered three-dimensional Cartesian grid. J. Comput. Phys. 2003, 184, 1–36. [Google Scholar] [CrossRef]
- Perot, J. An Analysis of the Fractional Step Method. J. Comput. Phys. 1993, 108, 51–58. [Google Scholar] [CrossRef]
- Fadlun, E.; Verzicco, R.; Orlandi, P.; Mohd-Yusof, J. Combined Immersed-Boundary Finite-Difference Methods for Three-Dimensional Complex Flow Simulations. J. Comput. Phys. 2000, 161, 35–60. [Google Scholar] [CrossRef]
- Perez-Ramirez, Y.; Santoni, P.; Tramoni, J.; Bosseur, F.; Mell, W. Examination of WFDS in Modeling Spreading Fires in a Furniture Calorimeter. Fire Technol. 2017, 53, 1795–1832. [Google Scholar] [CrossRef]
- Porterie, B.; Consalvi, J.; Kaiss, A.; Loraud, J. Predicting Wildland Fire Behavior and Emissions Using a Fine-Scale Physical Model. Numer. Heat Transf. Part A 2005, 47, 571–591. [Google Scholar] [CrossRef]
- Morvan, D.; Dupuy, J. Modeling the propagation of a wildfire through a Mediterranean shrub using a multiphase formulation. Combust. Flame 2004, 138, 199–210. [Google Scholar] [CrossRef]
- Houssami, M.; Mueller, E.; Filkov, A.; Thomas, J.; Skowronski, N.; Gallagher, M.; Clark, K.; Kremens, R.; Simeoni, A. Experimental procedures characterizing firebrand generation in wildland fires. Fire Technol. 2016, 52, 731–751. [Google Scholar] [CrossRef]
- Falkenstein-Smith, R.; McGrattan, K.; Toman, B.; Fernandez, M. Measurement of the Flow Resistance of Vegetation; NIST Technical Note 2039; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2019; Available online: https://doi.org/10.6028/NIST.TN.2039 (accessed on 5 February 2021).
- Cheney, N.; Gould, J.; Catchpole, W. Predition of Fire-Spread in Grasslands. Int. J. Wildland Fire 1993, 8, 1–13. [Google Scholar] [CrossRef]
- Mell, W.; Hoffman, C.; Ziegler, J. The state of physics-based fire modeling and an example of a reduced fire-physics model. In Proceedings of the 6th International Fire Behavior and Fuels Conference, International Association of Wildland Fire, Missoula, MT, USA, 29 April–3 May 2019. [Google Scholar]
- Albini, F. Estimating Wildfire Behavior and Effects; Research Paper INT-30; Intermountain Forest and Range Experiment Station, USDA Forest Service: Ogden, UT, USA, 1976; Available online: https://www.fs.fed.us/rm/pubs_int/int_gtr030.pdf (accessed on 5 February 2021).
- Wilson, R. Reformulation of Forest Fire Spread Equations in SI Units; Research Note INT-292; Intermountain Forest and Range Experiment Station, USDA Forest Service: Ogden, UT, USA, 1980. Available online: https://www.fs.usda.gov/treesearch/pubs/33592 (accessed on 5 February 2021).
- Jarrin, N. Synthetic Inflow Boundary Conditions for the Numerical Simulation of Turbulence. Ph.D. Thesis, The University of Manchester, Manchester, UK, 2008. [Google Scholar]
- Dyer, A. A review of flux profile relationships. Boundary-Layer Meteorol. 1974, 7, 363–372. [Google Scholar] [CrossRef]
- Coupled Atmosphere-Wildland Fire Environmant (CAWFE); National Center for Atmospheric Research: Boulder, CO, USA, 2013.
- Cheney, N.; Gould, J.; Catchpole, W. The Influence of Fuel, Weather and Fire Shape Variables on Fire-Spread in Grasslands. Int. J. Wildland Fire 1993, 3, 31–44. [Google Scholar] [CrossRef]
- Arca, B.; Duce, P.; Laconi, M.; Pellizzaro, G.; Salis, M.; Spano, D. Evaluation of FARSITE simulator Mediterranean marquis. Int. J. Wildland Fire 2007, 16, 563–573. [Google Scholar] [CrossRef]
- Susott, R. Characterization of the thermal properties of forest fuels by combustible gas analysis. For. Sci. 1982, 2, 404–420. [Google Scholar]
- Khan, M.; Tewarson, A.; Chaos, M. Combustion Characteristics of Materials and Generation of Fire Products. In SFPE Handbook of Fire Protection Engineering, 5th ed.; Springer: New York, NY, USA, 2016; Chapter 36; pp. 1143–1232. [Google Scholar]
- Farouki, O. Thermal Properties of Soils; CRREL Monograph 81-1; U.S. Army Corps of Engineers, Cold Regions Research and Engineering Laboratory: Hanover, NH, USA, 1981. [Google Scholar]
- McGrattan, K. Progress in Modeling Wildland Fires using Computational Fluid Dynamics. In Proceedings of the 10th U.S. National Combustion Meeting, College Park, MD, USA, 23–26 April 2017. [Google Scholar]
- Available online: https://qgis.org/en/site/ (accessed on 5 February 2021).
- Available online: https://github.com/firetools/qgis2fds/wiki/ (accessed on 5 February 2021).
- Trucchia, A.; D’Andrea, M.; Baghino, F.; Fiorucci, P.; Ferraris, L.; Negro, D.; Gollini, A.; Severino, M. PROPAGATOR: An Operational Cellular-Automata Based Wildfire Simulator. Fire 2020, 3, 26. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Units | Case C064 | Case F19 |
|---|---|---|---|
| Wind Speed | m/s | 4.6 | 4.8 |
| Ambient Temperature | C | 32 | 34 |
| Surface Area to Volume Ratio | m | 9770 | 12,240 |
| Grass Height | m | 0.21 | 0.51 |
| Bulk Mass per Unit Area | kg/m | 0.283 | 0.313 |
| Moisture Fraction | % | 6.3 | 5.8 |
| Measured RoS | m/s | 1.2 | 1.5 |
| Calc’d RoS, Particle Method (0.25 m, 0.5 m, 1.0 m resolution) | m/s | 1.1, 1.2, 1.2 | 1.4, 1.3, 1.4 |
| Calc’d RoS, Boundary Fuel Method (0.25 m, 0.5 m, 1.0 m resolution) | m/s | 1.3, 1.3, 1.3 | 1.5, 1.4, 1.7 |
| Calc’d RoS, Level Set Method (5 m, 10 m, 20 m resolution) | m/s | 0.5, 0.6, 0.6 | 1.0, 1.1, 1.2 |
| Property | Units | Value | Reference |
|---|---|---|---|
| Chemical Composition | – | CHO | Assumption |
| Heat of Combustion | kJ/kg | 15,600 | [63] |
| Soot Yield | kg/kg | 0.015 | [64] |
| Char Yield | kg/kg | 0.2 | [63] |
| Specific Heat | kJ/(kg·K) | 1.5 | Various sources |
| Conductivity | W/(m·K) | 0.1 | Assumption |
| Density | kg/m | 512 | [6] |
| Heat of Pyrolysis | kJ/kg | 418 | [51] |
| Pyrolyis Temperature | C | 200 | [51] |
| Obukhov Length | m | −500 | Assumption |
| Aerodynamic Roughness Length | m | 0.03 | Assumption |
| Drag Coefficient | – | 2.8 | [53] |
| Soil Specific Heat | kJ/(kg·K) | 2.0 | [65] |
| Soil Conductivity | W/(m·K) | 0.25 | [65] |
| Soil Density | kg/m | 1300 | [65] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vanella, M.; McGrattan, K.; McDermott, R.; Forney, G.; Mell, W.; Gissi, E.; Fiorucci, P. A Multi-Fidelity Framework for Wildland Fire Behavior Simulations over Complex Terrain. Atmosphere 2021, 12, 273. https://doi.org/10.3390/atmos12020273
Vanella M, McGrattan K, McDermott R, Forney G, Mell W, Gissi E, Fiorucci P. A Multi-Fidelity Framework for Wildland Fire Behavior Simulations over Complex Terrain. Atmosphere. 2021; 12(2):273. https://doi.org/10.3390/atmos12020273
Chicago/Turabian StyleVanella, Marcos, Kevin McGrattan, Randall McDermott, Glenn Forney, William Mell, Emanuele Gissi, and Paolo Fiorucci. 2021. "A Multi-Fidelity Framework for Wildland Fire Behavior Simulations over Complex Terrain" Atmosphere 12, no. 2: 273. https://doi.org/10.3390/atmos12020273
APA StyleVanella, M., McGrattan, K., McDermott, R., Forney, G., Mell, W., Gissi, E., & Fiorucci, P. (2021). A Multi-Fidelity Framework for Wildland Fire Behavior Simulations over Complex Terrain. Atmosphere, 12(2), 273. https://doi.org/10.3390/atmos12020273