
Prediction of Transient NOx Emission from Diesel Vehicles Based on Deep-Learning Differentiation Model with Double Noise Reduction

Abstract
:1. Introduction
2. Methodology
2.1. Singular Spectrum Analysis
2.2. Improved Adaptive Noise Fully Integrated Empirical Mode Decomposition
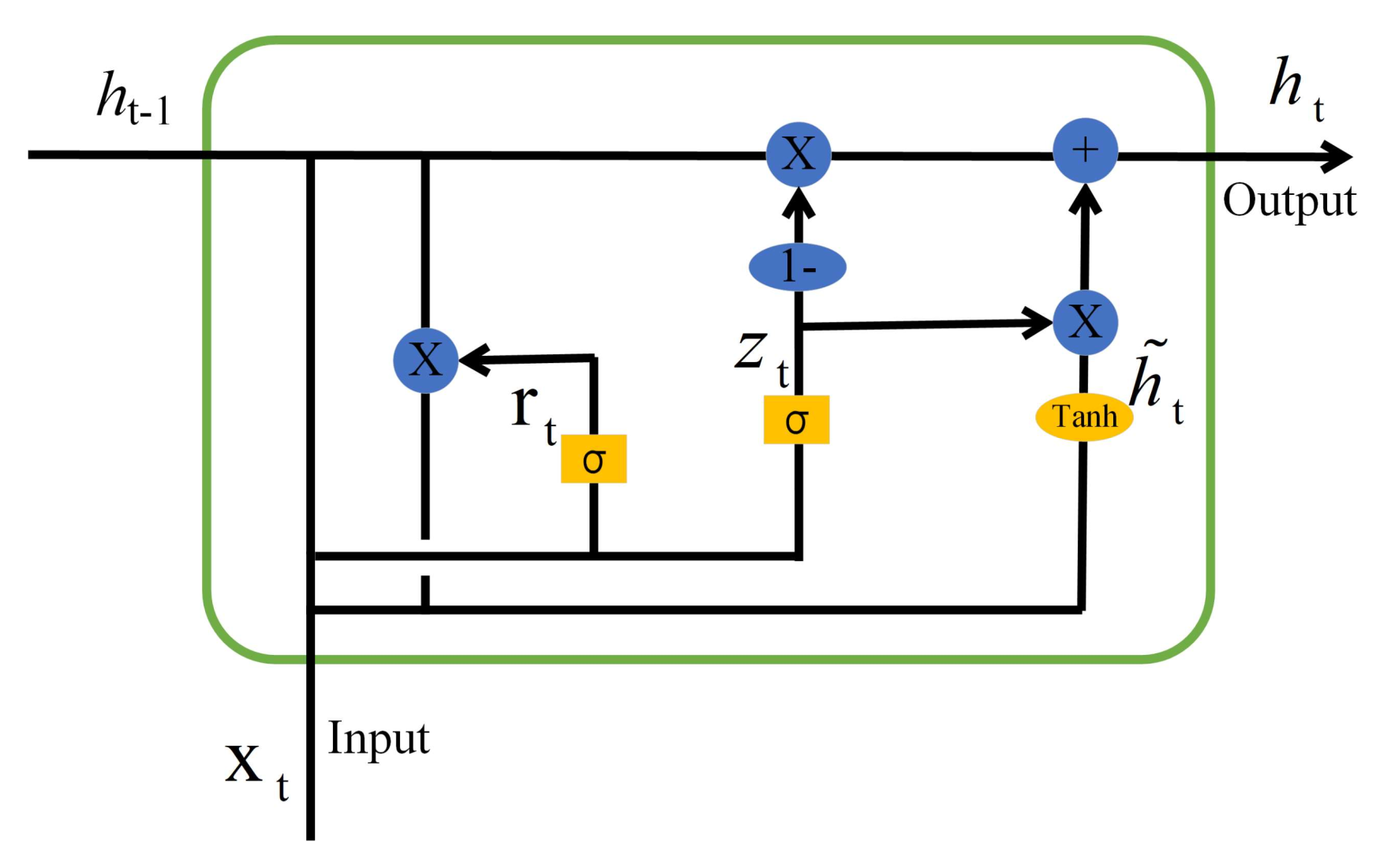
2.3. Gated Recurrent Unit
2.4. Support Vector Regression
2.5. Deep-Learning Differentiation Models with Double Noise Reduction
- (1)
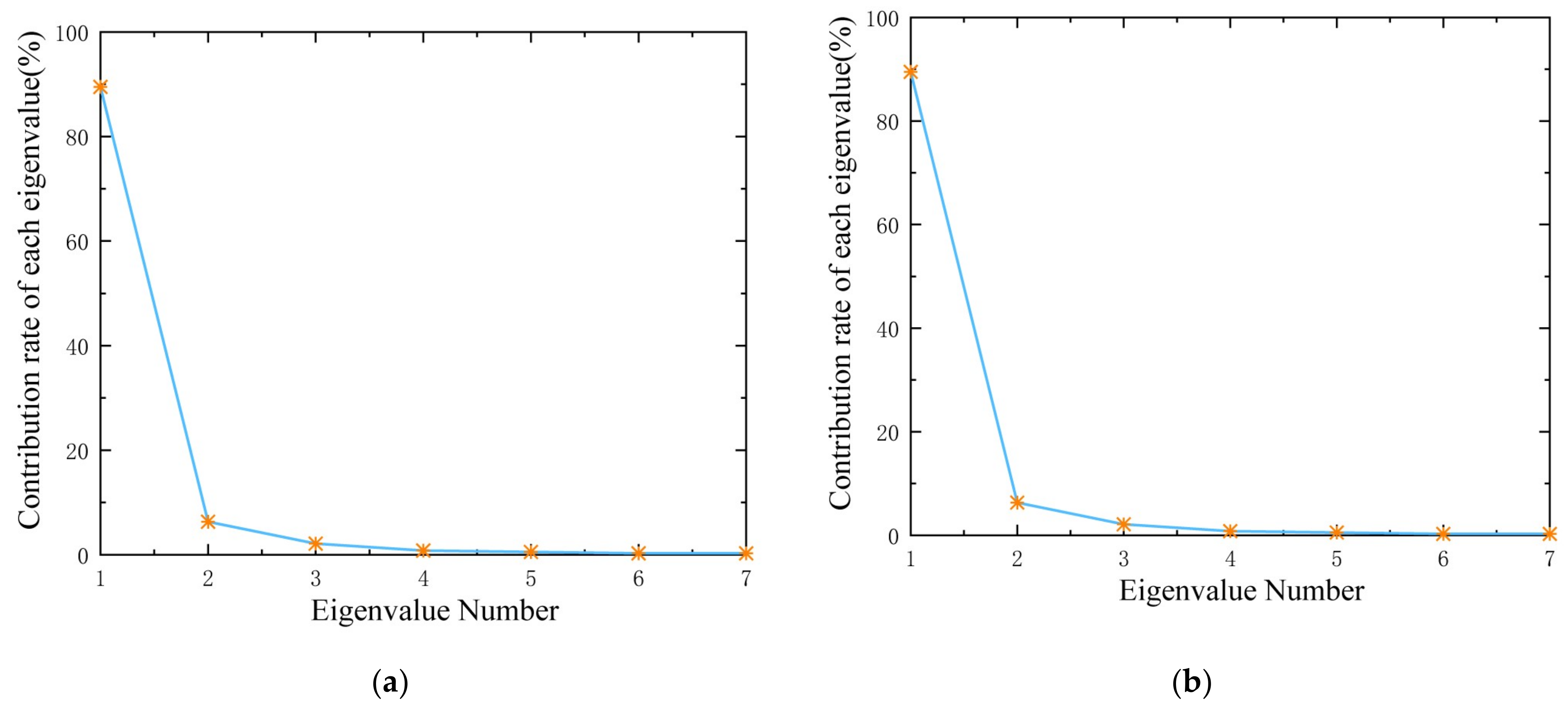
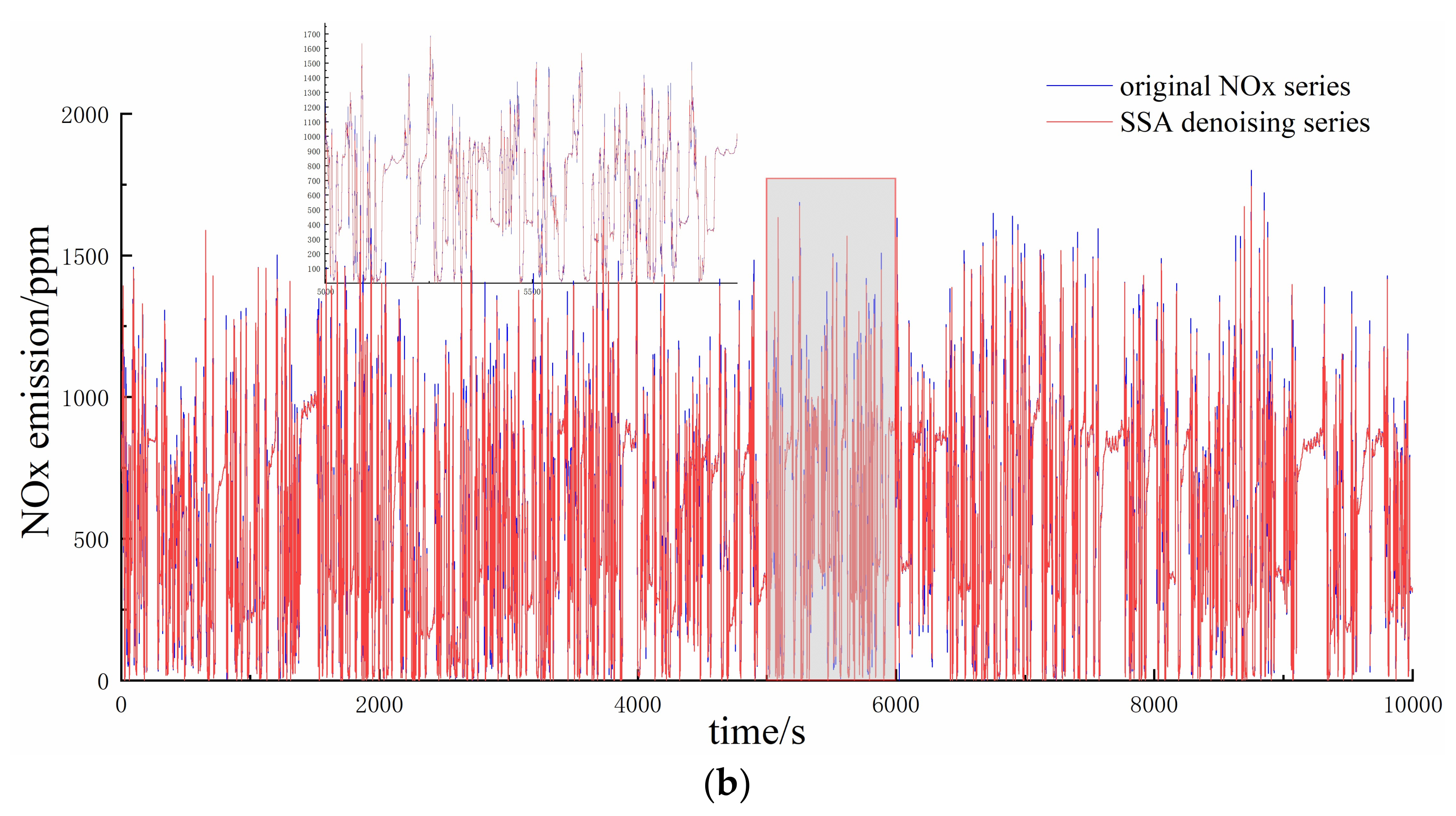
- Use SSA to decompose and reconstruct the original data, extract the effective trend information, and discard the noise part. The SSA window length is set to seven, with bus 1 selecting the first five principal component reconstruction data and bus 2 selecting the first three principal component reconstruction data.
- (2)
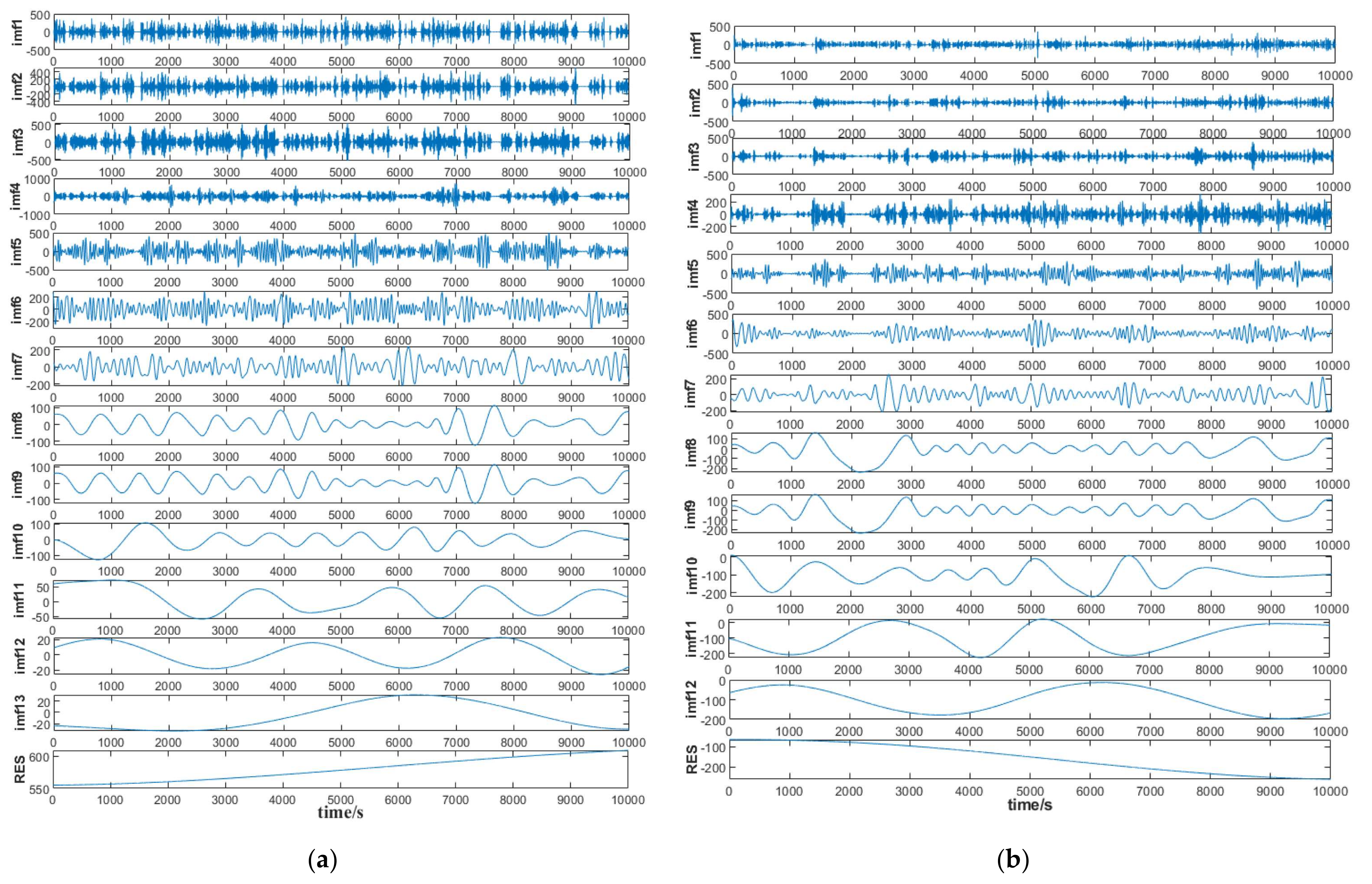
- Use ICEEMDAN to decompose the data after the SSA noise reduction into subsequences with different complexities to reduce the influence of noise still existing in the data. Add the standard deviation of noise of 0.45 to ICEEMDAN for 1000 times, and the maximum number of iterations is allowed to be 40,000.
- (3)
- Using the complexity of the sample entropy operator sequences, and using 1 as the cutoff point, the subsequences are divided into high-frequency ones and low-frequency ones.
- (4)
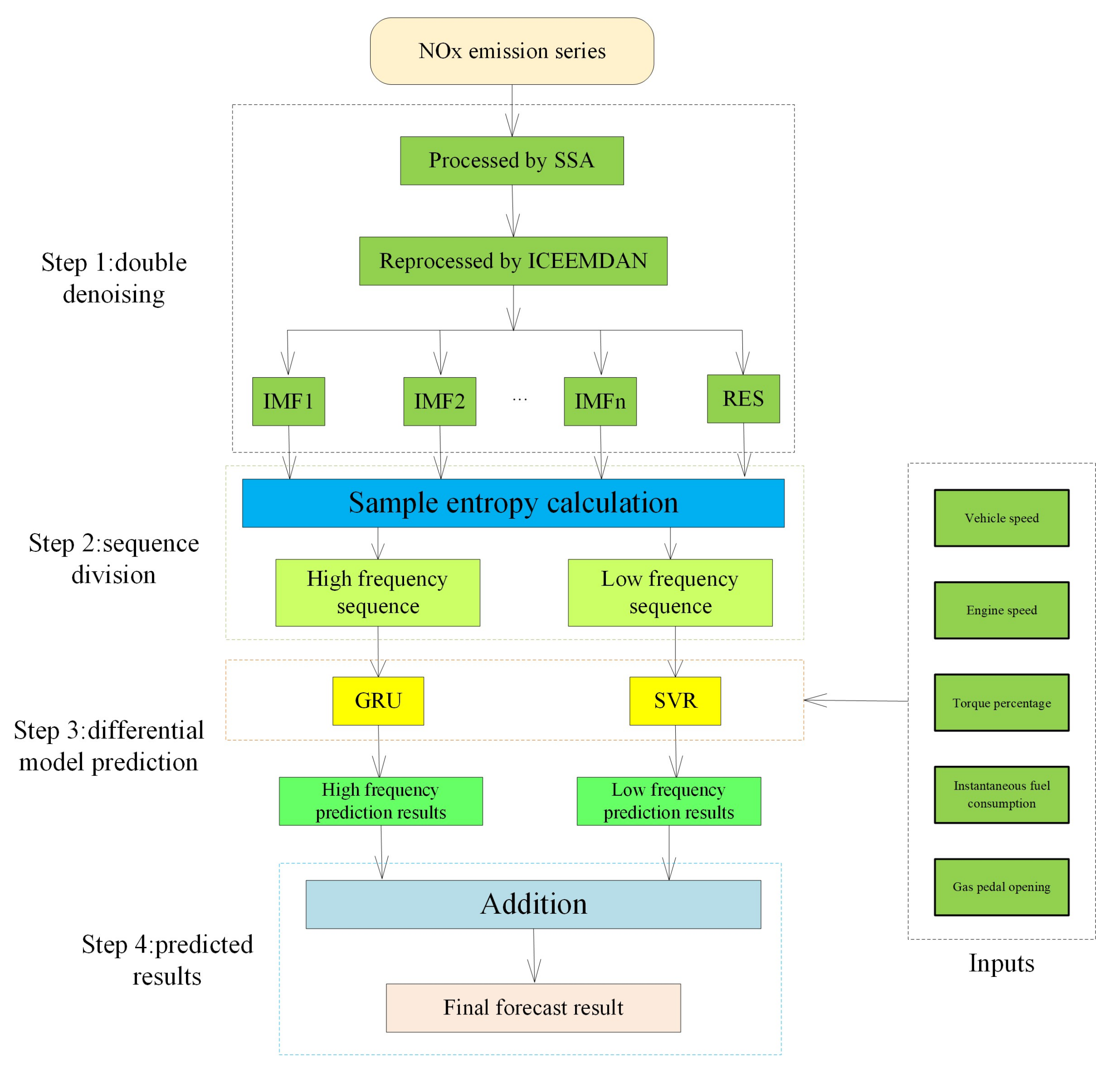
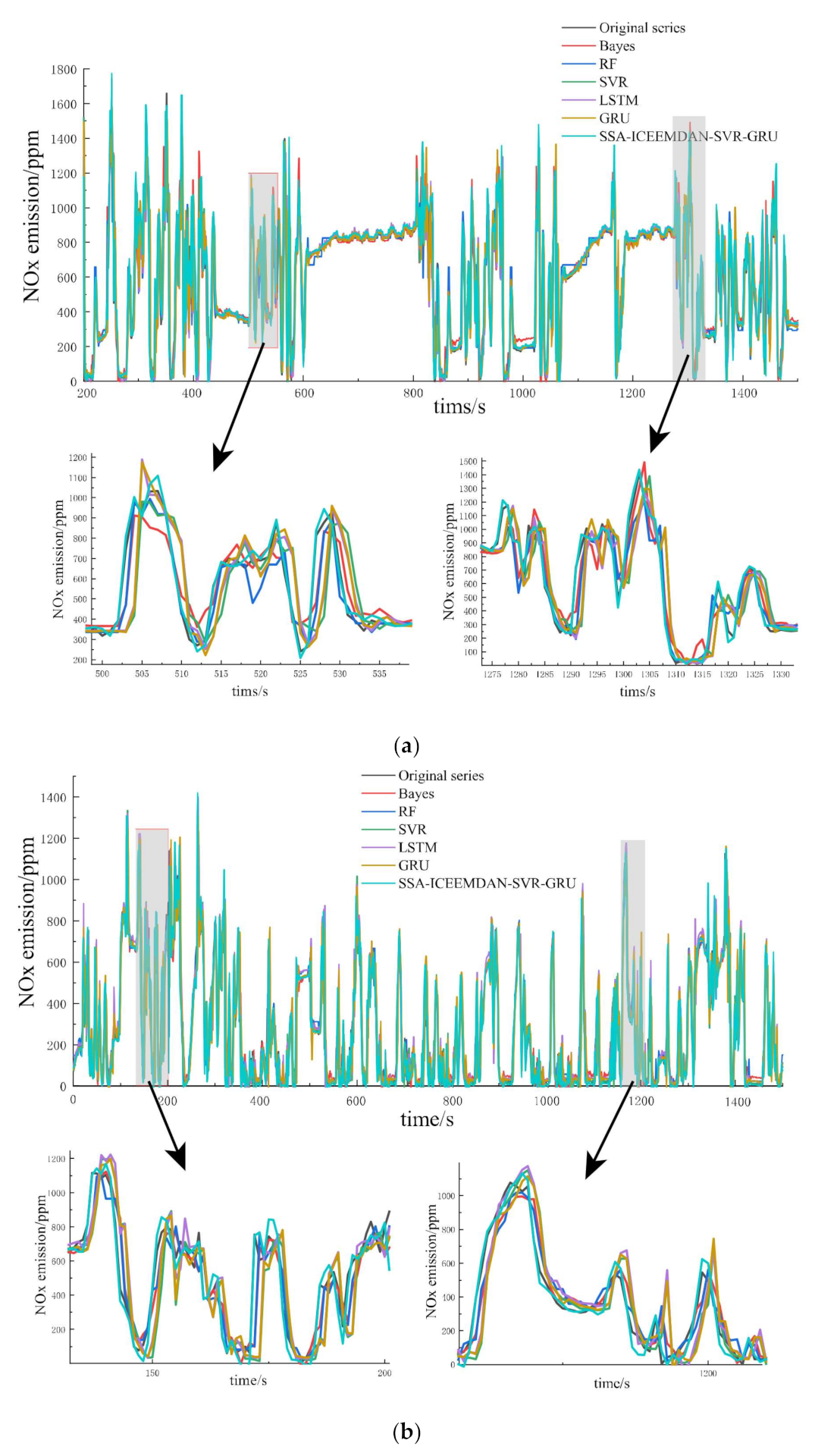
- Vehicle speed, engine speed, torque percentage, instantaneous fuel consumption, and gas pedal opening are used as inputs to the sub-model, and the ICEEMDAN decomposed subseries are used as outputs. Model and predict the high-frequency subsequences by GRU. Predict the low-frequency subsequences by SVR. Since the optimal hyperparameters of each sub-model are different, the optimal hyperparameters of each sub-model are obtained by a grid search. The hyperparameters of grid search for the GRU model include the number of hidden layers, number of neurons in hidden layers, number of iterations, and batch size. The hyperparameters of grid search for the SVR model include learning rate, kernel function, number of iterations, and penalty factor. Obtain the final results by integrating the prediction results of the two models.
3. Case Study
3.1. Data Sources
3.2. Evaluation Indexes
3.3. Data Processing Analysis
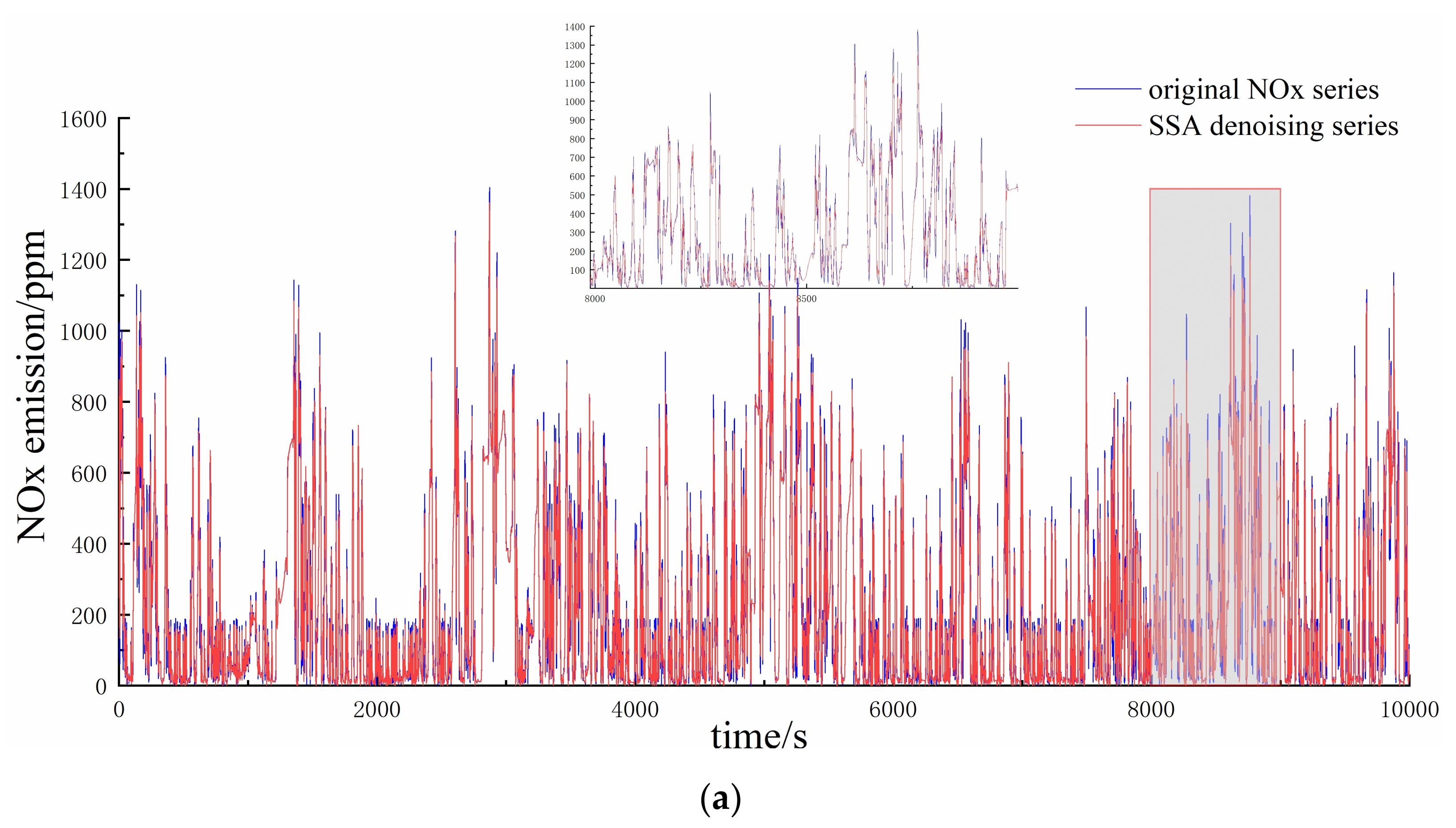
3.3.1. Singular Spectrum Noise Reduction
3.3.2. ICEEMDAN Decomposition Sequence
3.3.3. Calculation of Sub-Sequence Complexity
3.3.4. Analysis of the Prediction Results of Each Sub-Sequence by GRU and SVR
4. Results and Discussion
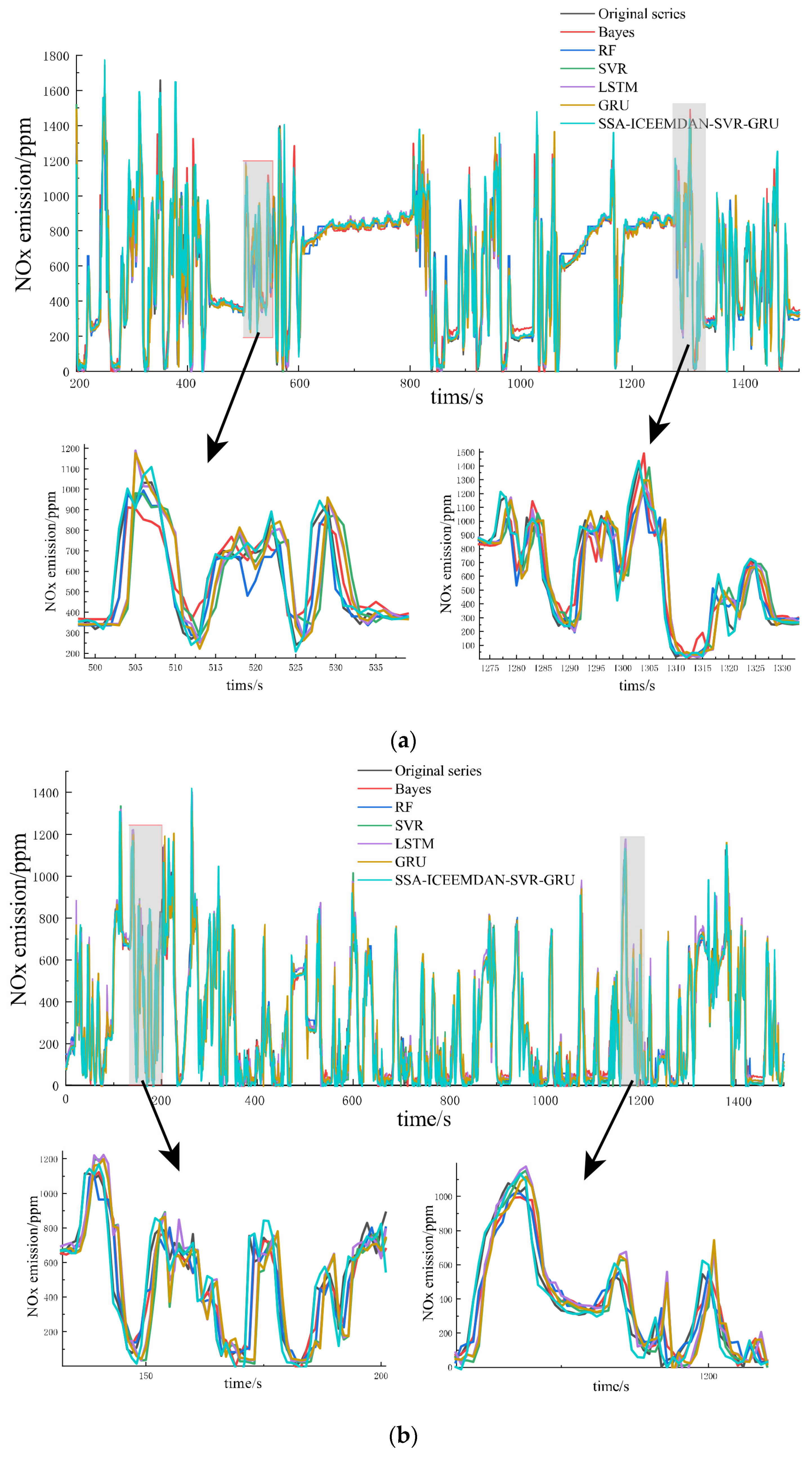
4.1. Comparative Analysis of Single Models
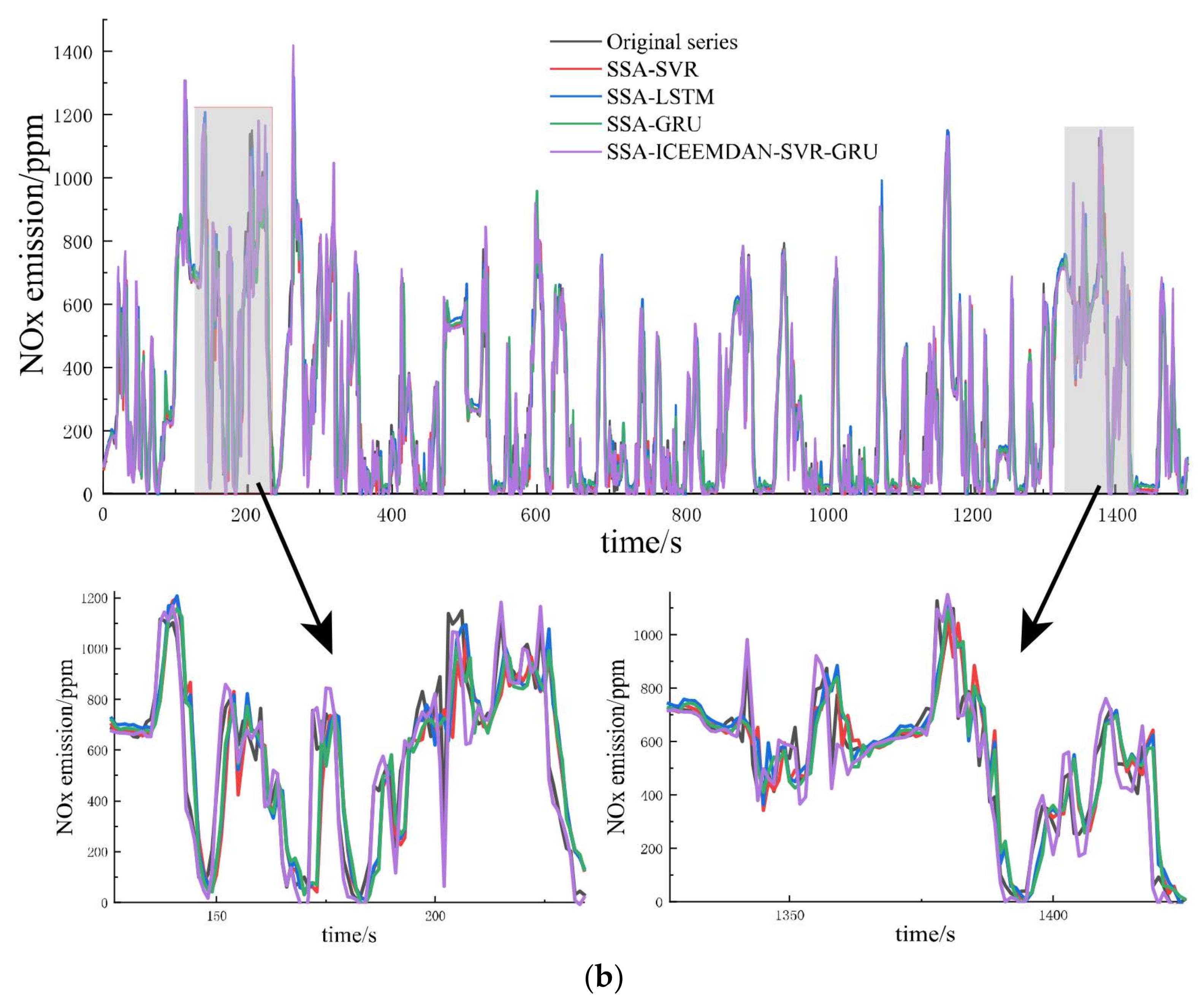
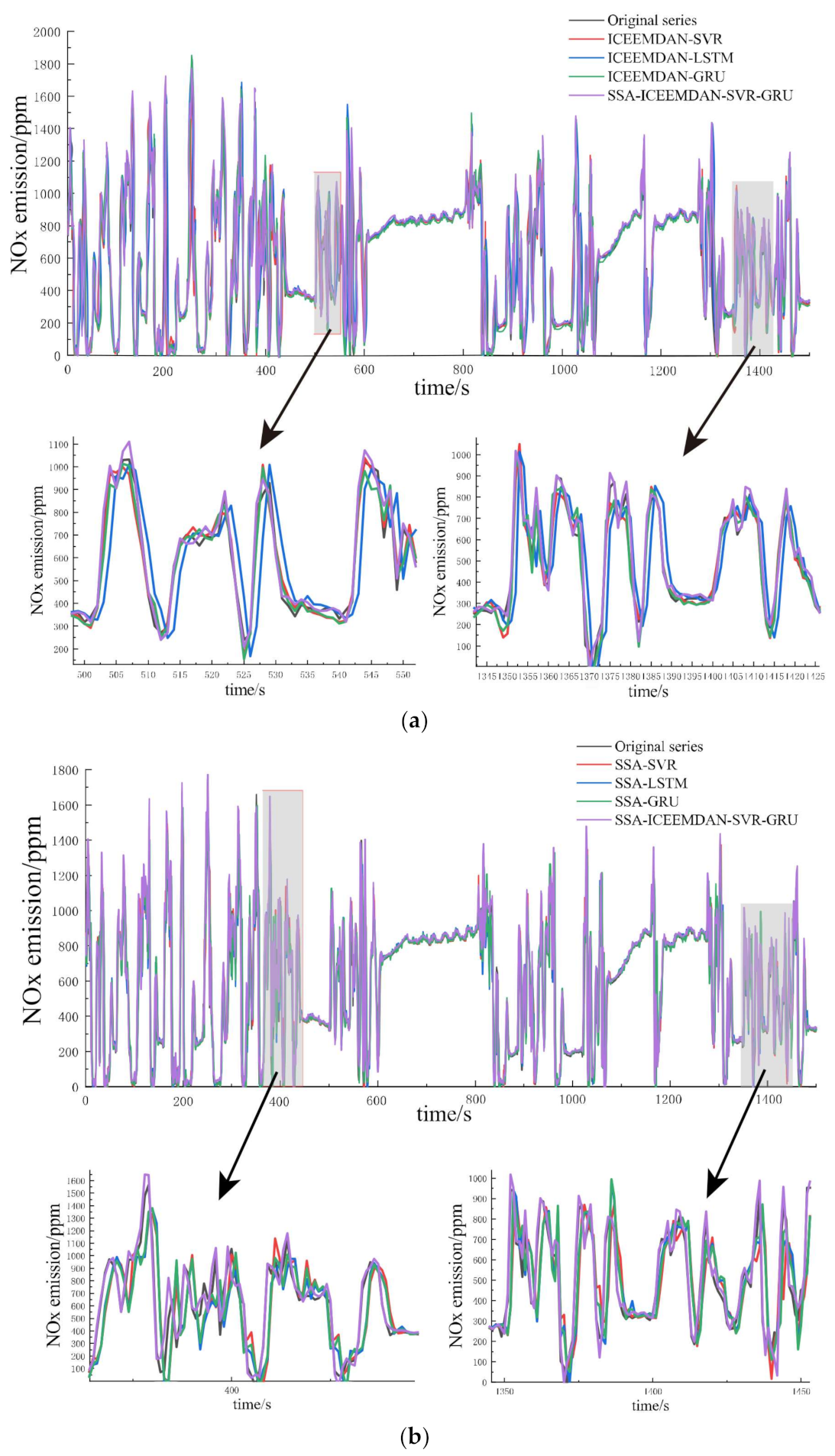
4.2. Comparative Analysis of SSA Single Treatment Results
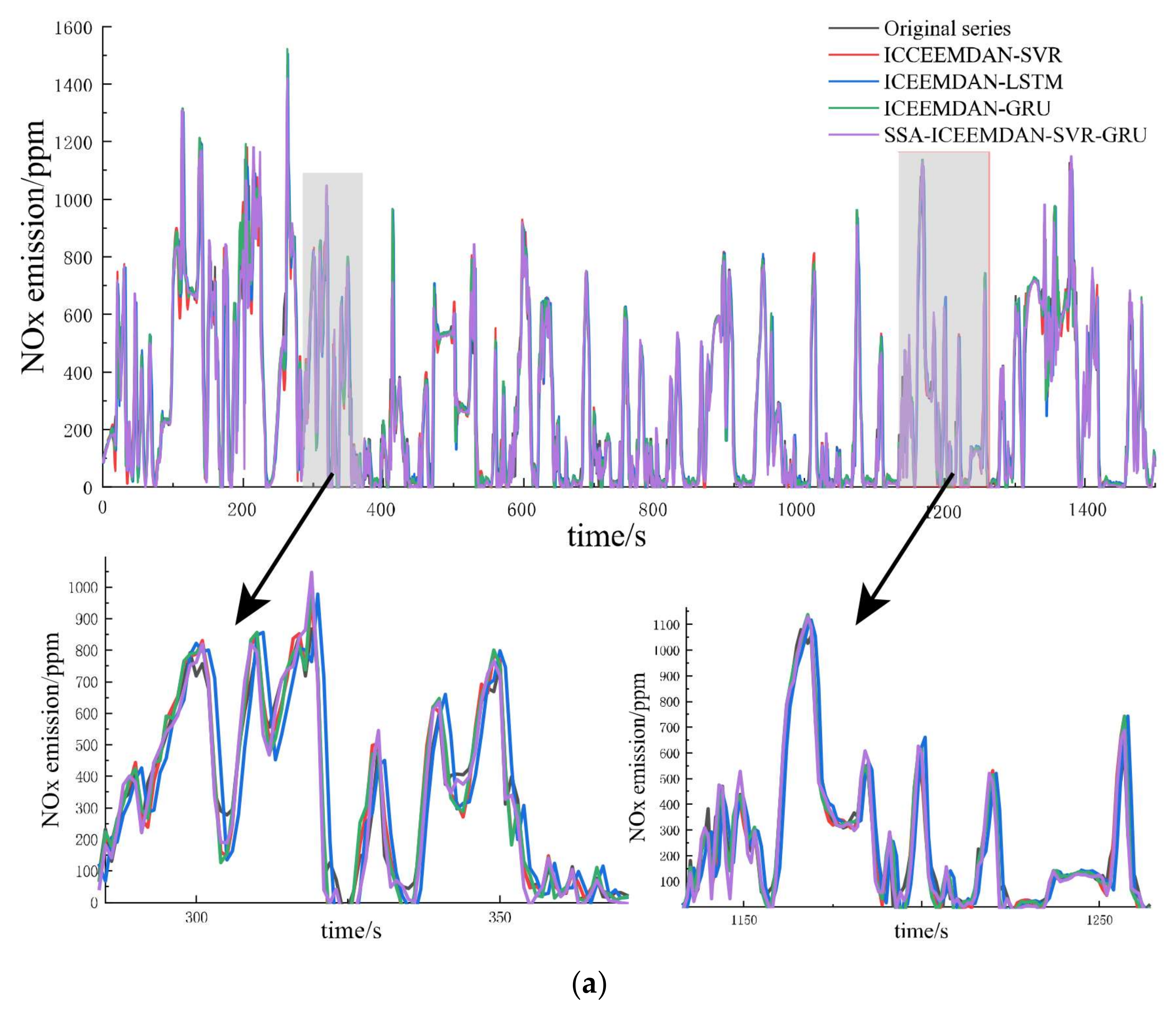
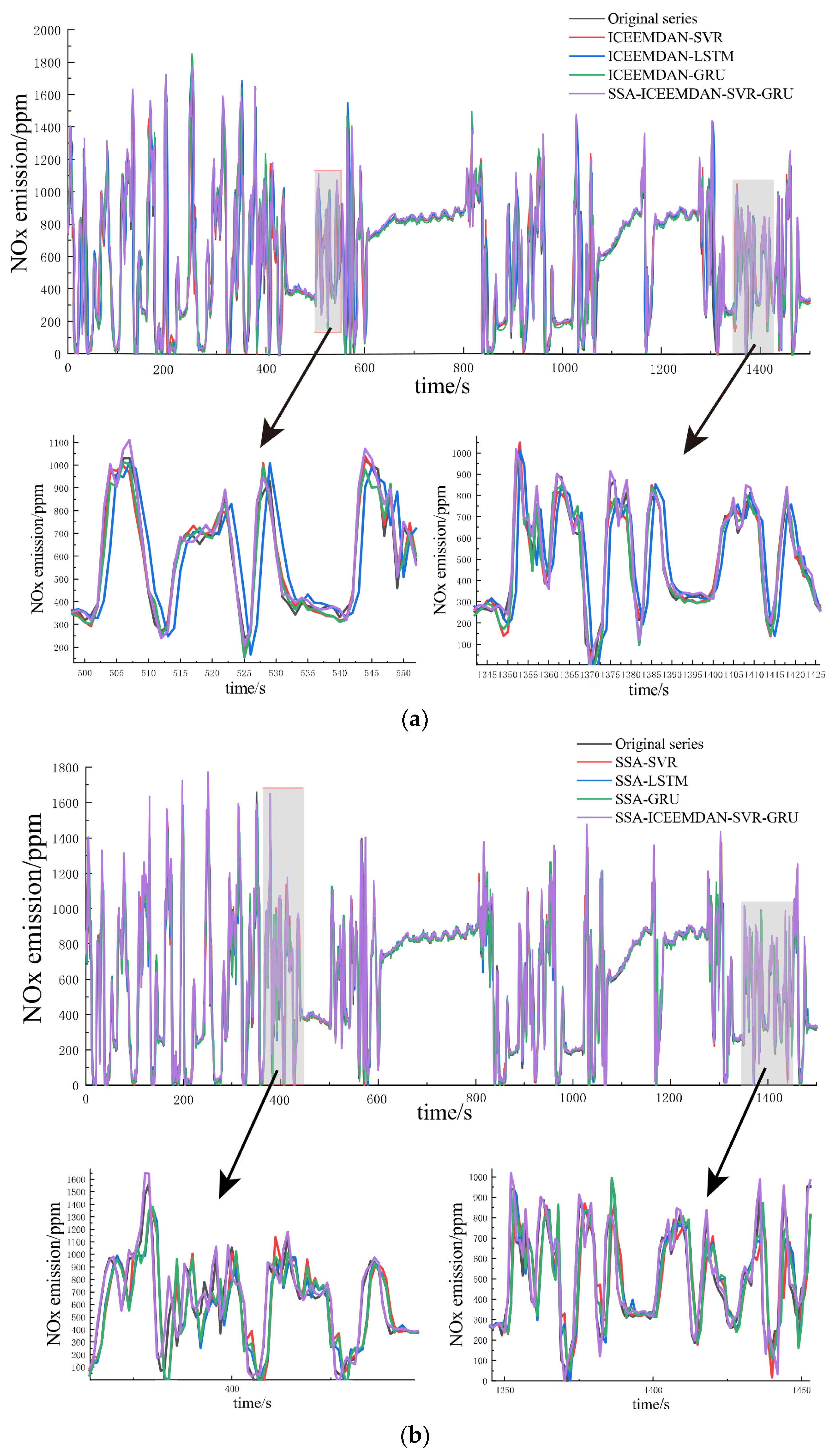
4.3. Comparative Analysis of Single Treatment Results of ICEEMDAN
5. Conclusions
- (1)
- After noise reduction by SSA, the prediction model is established. The accuracy is higher than that of a single model. It shows that SSA can remove the outliers in the original sequence. It also shows that noise has a great influence on the prediction results of NOx transient emissions of diesel vehicles.
- (2)
- Using ICEEMDAN to process the original data and then modeling, the prediction accuracy is significantly improved, indicating that ICEEMDAN’s decomposition method can effectively extract the trend law and useful information of the original sequence, which helps the model learn its internal laws and improve the performance of the model.
- (3)
- After comprehensively considering SSA noise reduction and ICEEDAN decomposition, the combined model SSA-ICEEMDAN-SVR-GRU has the best prediction performance. The results show that double noise reduction has better prediction performance than the single-processing method in improving the accuracy of transient NOx emission prediction.
- (4)
- The use of SVR in the low-frequency sequence instead of the GRU model with higher computational cost can reduce the prediction time and maintain the prediction performance of the model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ministry of Ecology and Environment of the People’s Republic of China. China Mobile Source Environmental Management Annual Report; China Ministry of Ecology and Environment: Beijing, China, 2020; Volume 1, pp. 1–7.
- Giakoumis, E.; Alafouzos, A. Study of diesel engine performance and emissions during a Transient Cycle applying an engine mapping-based methodology. Appl. Energy 2010, 87, 1358–1365. [Google Scholar] [CrossRef]
- Wang, G.; Awad, O.I.; Liu, S.; Shuai, S.; Wang, Z. NOx emissions prediction based on mutual information and back propagation neural network using correlation quantitative analysis. Energy 2020, 198, 117286. [Google Scholar] [CrossRef]
- Abulut, M.; Ayyildiz, M.; Sardemir, S. Prediction of performance, combustion and emission characteristics for a CI engine at varying injection pressures. Energy 2020, 197, 117257. [Google Scholar] [CrossRef]
- Lotfan, S.; Ghiasi, R.A.; Fallah, M.; Sadeghi, M. ANN-based modeling and reducing dual-fuel engine’s challenging emissions by multi-objective evolutionary algorithm NSGA-II. Appl. Energy 2016, 175, 91–99. [Google Scholar] [CrossRef]
- Duan, H.; Huang, Y.; Mehra, R.K.; Song, P.; Ma, F. Study on influencing factors of prediction accuracy of support vector machine (SVM) model for NOx emission of a hydrogen enriched compressed natural gas engine. Fuel 2018, 234, 954–964. [Google Scholar] [CrossRef]
- Kumbala, B.R. Predictive Maintenance of NOx Sensor Using Deep Learning: Time Series Prediction with Encoder-Decoder LSTM; Blekinge Tekniska Hogskola: Karlskrona, Sweden, 2019. [Google Scholar]
- Maurya, R.K.; Mishra, P. Parametric investigation on combustion and emissions characteristics of a dual fuel (natural gas port injection and diesel pilot injection) engine using 0-D SRM and 3D CFD approach. Fuel 2017, 210, 900–913. [Google Scholar] [CrossRef]
- Provataris, S.A.; Savva, N.S.; Chountalas, T.D.; Hountalas, T. Prediction of NOx emissions for high speed DI Diesel engines using a semi-empirical, two-zone model. Energy Convers. Manag. 2017, 153, 659–670. [Google Scholar] [CrossRef]
- Hsieh, M.-F.; Wang, J. NO and NO2 concentration modeling and observer-based estimation across a diesel engine aftertreatment system. J. Dyn. Syst. Meas. Control 2011, 133, 041005. [Google Scholar] [CrossRef]
- Liu, Y.; Midkiff, K.; Bell, S. Development of a multizone model for direct injection diesel combustion. Int. J. Engine Res. 2004, 5, 71–81. [Google Scholar] [CrossRef]
- Panis, L.I.; Broekx, S.; Liu, R. Modelling instantaneous traffic emission and the influence of traffic speed limits. Sci. Total Environ. 2006, 371, 270–285. [Google Scholar] [CrossRef]
- Smit, R.; Ntziachristos, L.; Boulter, P. Validation of road vehicle and traffic emission models–A review and meta-analysis. Atmos. Environ. 2010, 44, 2943–2953. [Google Scholar] [CrossRef]
- Altuğ, K.B.; Küçük, S.E. Predicting Tailpipe NOx Emission using Supervised Learning Algorithms. In Proceedings of the 2019 3rd International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 11–13 October 2019. [Google Scholar]
- Liu, B.; Hu, J.; Yan, F.; Turkson, F.; Lin, F. A novel optimal support vector machine ensemble model for NOx emissions prediction of a diesel engine. Measurement 2016, 92, 183–192. [Google Scholar] [CrossRef]
- Domínguez-Sáez, A.; Rattá, G.A.; Barrios, C.C. Prediction of exhaust emission in transient conditions of a diesel engine fueled with animal fat using Artificial Neural Network and Symbolic Regression. Energy 2018, 149, 675–683. [Google Scholar] [CrossRef]
- Lavda, F.; Ramapuram, J.; Gregorova, M.; Alexandors, K. Continual Classification Learning Using Generative Models. arXiv 2018, arXiv:1810.10612. [Google Scholar]
- Shin, S.; Lee, Y.; Kim, M.; Park, J.; Lee, S.; Min, K. Deep neural network model with Bayesian hyperparameter optimization for prediction of NOx at transient conditions in a diesel engine. Eng. Appl. Artif. Intell. 2020, 94, 103761. [Google Scholar] [CrossRef]
- Bokde, N.; Feijóo, A.; Villanueva, D.; Kulat, K. A Review on Hybrid Empirical Mode Decomposition Models for Wind Speed and Wind Power Prediction. Energies 2019, 12, 254. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Chen, H.; Wang, J.; Yang, X.; Yan, R.; Jia, J.; Xu, W. Application of hybrid model based on double decomposition, error correction and deep learning in short-term wind speed prediction. Energy Convers. Manag. 2020, 205, 112345. [Google Scholar] [CrossRef]
- Tong, C.; Li, J.; Lang, C.; Kong, F.; Niu, J.; Rodrigues, J. An efficient deep model for day-ahead electricity load forecasting with stacked denoising auto-encoders. J. Parallel Distrib. Comput. 2018, 117, 267–273. [Google Scholar] [CrossRef]
- Niu, H.; Xu, K.; Wang, W. A hybrid stock price index forecasting model based on variational mode decomposition and LSTM network. Appl. Intell. 2020, 50, 4296–4309. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Zhang, K. Short-term electric load forecasting based on singular spectrum analysis and support vector machine optimized by Cuckoo search algorithm. Electr. Power Syst. Res. 2017, 146, 270–285. [Google Scholar] [CrossRef]
- Xiao, L.; Shao, W.; Yu, M.; Ma, J.; Jin, C. Research and application of a hybrid wavelet neural network model with the improved cuckoo search algorithm for electrical power system forecasting. Appl. Energy 2017, 198, 203–222. [Google Scholar] [CrossRef]
- Vautard, R.; Yiou, P.; Ghil, M. Singular-spectrum analysis: A toolkit for short, noisy chaotic signals. Phys. D Nonlinear Phenom. 1992, 58, 95–126. [Google Scholar] [CrossRef]
- Li, T.; Zhou, Y.; Li, X.; Wu, J.; He, T. Forecasting daily crude oil prices using improved CEEMDAN and ridge regression-based predictors. Energies 2019, 12, 3603. [Google Scholar] [CrossRef] [Green Version]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E. Improved complete ensemble EMD: A suitable tool for biomedical signal processing. Biomed. Signal Process. Control 2014, 14, 19–29. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Y.; Cao, R.; Ali, W.; Liang, H. A New Feature Extraction Method for Ship-Radiated Noise Based on Improved CEEMDAN, Normalized Mutual Information and Multiscale Improved Permutation Entropy. Entropy 2019, 21, 624. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Dey, R.; Salemt, F.M. Gate-variants of gated recurrent unit (GRU) neural networks. In Proceedings of the 2017 IEEE 60th international midwest symposium on circuits and systems (MWSCAS), Boston, MA, USA, 6–9 August 2017. [Google Scholar]
- Agarap, A.F.M. A neural network architecture combining gated recurrent unit (GRU) and support vector machine (SVM) for intrusion detection in network traffic data. In Proceedings of the 2018 10th International Conference on Machine Learning and Computing, Macau, China, 26–28 February 2018. [Google Scholar]
- Minh, D.L.; Sadeghi-Niaraki, A.; Huy, H.D.; Min, K.; Hyeonjoon, M. Deep learning approach for short-term stock trends prediction based on two-stream gated recurrent unit network. IEEE Access 2018, 6, 55392–55404. [Google Scholar] [CrossRef]
- Karimipour, A.; Bagherzadeh, S.A.; Taghipour, A.; Abdollahi, A.; Safaei, M. A novel nonlinear regression model of SVR as a substitute for ANN to predict conductivity of MWCNT-CuO/water hybrid nanofluid based on empirical data. Phys. A Stat. Mech. Appl. 2019, 521, 89–97. [Google Scholar] [CrossRef]
- Jalalifar, S.; Masoudi, M.; Abbassi, R.; Garaniya, V.; Ghiji, M.; Salehi, F. A hybrid SVR-PSO model to predict a CFD-based optimised bubbling fluidised bed pyrolysis reactor. Energy 2020, 191, 116414. [Google Scholar] [CrossRef]
- Günther, R.; Wenzel, T.; Wegner, M.; Rettig, R. Big data driven dynamic driving cycle development for busses in urban public transportation. Transp. Res. Part D Transp. Environ. 2017, 51, 276–289. [Google Scholar] [CrossRef]
- Wang, W.; Lu, Y. Analysis of the mean absolute error (MAE) and the root mean square error (RMSE) in assessing rounding model. IOP Conf. Ser. Mater. Sci. Eng. 2018, 324, 012049. [Google Scholar] [CrossRef]
- Nagelkerke, N.J. A note on a general definition of the coefficient of determination. Biometrika 1991, 78, 691–692. [Google Scholar] [CrossRef]
- Stephen, K.D.; Kazemi, A. Improved normalization of time-lapse seismic data using normalized root mean square repeatability data to improve automatic production and seismic history matching in the Nelson field. Geophys. Prospect. 2014, 62, 1009–1027. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basic Model(s) | Preprocessing Method | Reference |
|---|---|---|
| Backpropagation neural network | Means of mutual information | [3] |
| Artificial Neural Network | Uncertainty analysis | [4] |
| Multi-layer perceptron | Non-dominated sorting genetic algorithm II | [5] |
| Support vector machine | Model parameters optimization | [6] |
| Long Short-Term Memory | Encoder-Decoder | [7] |
| Parameter | Bus 1 | Bus 2 |
|---|---|---|
| Engine Power | 213 kw | 206 kw |
| Air intake System | Turbocharged inter-cooled | Turbocharged inter-cooled |
| Type | 6-cylinder, in-line, electrical control systems | 6-cylinder, in-line, water-cooled |
| Displacement | 8.9 L | 8.4 L |
| Maximum Torque (N.m) | 1050 | 1100 |
| Emission Standards | EU IV | EU IV |
| Rated Speed (rpm) | 2100 | 2200 |
| RMSE (ppm) | R2 | MAE (ppm) | ||||
|---|---|---|---|---|---|---|
| m | Bus 1 | Bus 2 | Bus 1 | Bus 2 | Bus 1 | Bus 2 |
| 3 | 97.512 | 90.112 | 0.917 | 0.897 | 54.967 | 51.897 |
| 4 | 97.139 | 92.692 | 0.923 | 0.896 | 55.033 | 52.998 |
| 5 | 96.982 | 91.892 | 0.925 | 0.899 | 55.015 | 52.392 |
| 6 | 98.939 | 90.934 | 0.922 | 0.902 | 55.739 | 52.401 |
| Unused SSA | 112.458 | 107.485 | 0.901 | 0.865 | 60.553 | 57.861 |
| Bus 1 | Bus 2 | ||
|---|---|---|---|
| Sequence | Sample Entropy | Sequence | Sample Entropy |
| IFM1 | 2.359 | IFM1 | 1.866 |
| IFM2 | 2.114 | IFM2 | 1.741 |
| IFM3 | 1.407 | IFM3 | 1.959 |
| IFM4 | 1.372 | IFM4 | 1.681 |
| IFM5 | 1.586 | IFM5 | 1.451 |
| IFM6 | 1.019 | IFM6 | 0.758 |
| IFM7 | 0.729 | IFM7 | 0.682 |
| IFM8 | 0.554 | IFM8 | 0.533 |
| IFM9 | 0.451 | IFM9 | 0.467 |
| IFM10 | 0.397 | IFM10 | 0.305 |
| IFM11 | 0.189 | IFM11 | 0.185 |
| IFM12 | 0.426 | IFM12 | 0.018 |
| IFM13 | 0.158 | RES | 0.001 |
| RES | 0.004 | ||
| Bus 1 | Bus 2 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Sequence | Model | RMSE (ppm) | R2 | MAE (ppm) | Time (s) | Model | RMSE (ppm) | R2 | MAE (ppm) | Time (s) |
| IMF1 | GRU model | 43.304 | 0.620 | 25.037 | 163 | GRU model | 34.168 | 0.510 | 20.837 | 158 |
| IMF2 | 17.456 | 0.955 | 10.711 | 162 | 13.381 | 0.944 | 9.030 | 157 | ||
| IMF3 | 3.797 | 0.999 | 2.590 | 162 | 3.603 | 0.998 | 2.648 | 157 | ||
| IMF4 | 2.035 | 0.999 | 1.596 | 162 | 1.236 | 0.999 | 0.935 | 157 | ||
| IMF5 | 0.894 | 0.999 | 0.657 | 162 | 0.761 | 0.999 | 0.564 | 157 | ||
| IMF6 | 0.889 | 0.999 | 0.651 | 162 | SVR model | 1.437 | 0.999 | 0.992 | 5 | |
| IMF7 | SVR model | 0.707 | 0.999 | 0.533 | 5 | 1.200 | 0.999 | 0.745 | 5 | |
| IMF8 | 1.739 | 0.999 | 1.335 | 5 | 1.063 | 0.999 | 0.628 | 4 | ||
| IMF9 | 0.297 | 0.999 | 0.216 | 4 | 0.846 | 0.999 | 0.662 | 4 | ||
| IMF10 | 0.503 | 0.999 | 0.434 | 4 | 0.128 | 0.999 | 0.081 | 4 | ||
| IMF11 | 0.226 | 0.999 | 0.185 | 4 | 0.385 | 0.999 | 0.198 | 4 | ||
| IMF12 | 0.242 | 0.999 | 0.194 | 4 | 0.194 | 0.999 | 0.156 | 3 | ||
| IMF13 | 0.053 | 0.999 | 0.035 | 3 | NA * | NA | NA | NA | ||
| RES | 0.406 | 0.999 | 0.358 | 3 | 0.241 | 0.999 | 0.211 | 3 | ||
| RMSE (ppm) | R2 | MAE (ppm) | NRMSE (%) | |||||
|---|---|---|---|---|---|---|---|---|
| Model | Bus 1 | Bus 2 | Bus 1 | Bus 2 | Bus 1 | Bus 2 | Bus 1 | Bus 2 |
| SVR | 112.630 | 97.609 | 0.901 | 0.889 | 60.284 | 49.006 | 6.458 | 7.716 |
| Bayes | 125.557 | 95.229 | 0.877 | 0.885 | 76.681 | 61.382 | 7.167 | 7.528 |
| RF | 113.412 | 94.232 | 0.899 | 0.888 | 65.928 | 56.859 | 6.479 | 7.449 |
| LSTM | 104.178 | 99.938 | 0.915 | 0.883 | 55.575 | 56.616 | 5.974 | 7.900 |
| GRU | 103.032 | 98.723 | 0.917 | 0.886 | 55.535 | 54.331 | 5.908 | 7.804 |
| SSA-SVR | 97.079 | 83.442 | 0.924 | 0.912 | 54.816 | 45.253 | 5.566 | 6.596 |
| SSA-LSTM | 90.449 | 80.623 | 0.934 | 0.918 | 51.719 | 48.611 | 5.186 | 6.373 |
| SSA-GRU | 88.915 | 80.832 | 0.937 | 0.917 | 49.922 | 48.166 | 5.098 | 6.390 |
| ICEEMDAN -SVR | 77.607 | 60.868 | 0.953 | 0.957 | 46.193 | 39.647 | 4.450 | 4.812 |
| ICEEMDAN -LSTM | 68.217 | 55.702 | 0.964 | 0.964 | 43.071 | 35.91 | 3.912 | 4.403 |
| ICEEMDAN -GRU | 69.371 | 56.824 | 0.962 | 0.962 | 43.832 | 36.705 | 3.978 | 4.492 |
| SSA-ICEEMDAN-SVR-GRU | 46.904 | 46.782 | 0.983 | 0.974 | 30.735 | 30.859 | 2.689 | 3.698 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Yu, Y.; Wang, Y.; Zhao, L.; He, C. Prediction of Transient NOx Emission from Diesel Vehicles Based on Deep-Learning Differentiation Model with Double Noise Reduction. Atmosphere 2021, 12, 1702. https://doi.org/10.3390/atmos12121702
Li J, Yu Y, Wang Y, Zhao L, He C. Prediction of Transient NOx Emission from Diesel Vehicles Based on Deep-Learning Differentiation Model with Double Noise Reduction. Atmosphere. 2021; 12(12):1702. https://doi.org/10.3390/atmos12121702
Chicago/Turabian StyleLi, Jiaqiang, Yang Yu, Yanyan Wang, Longqing Zhao, and Chao He. 2021. "Prediction of Transient NOx Emission from Diesel Vehicles Based on Deep-Learning Differentiation Model with Double Noise Reduction" Atmosphere 12, no. 12: 1702. https://doi.org/10.3390/atmos12121702
APA StyleLi, J., Yu, Y., Wang, Y., Zhao, L., & He, C. (2021). Prediction of Transient NOx Emission from Diesel Vehicles Based on Deep-Learning Differentiation Model with Double Noise Reduction. Atmosphere, 12(12), 1702. https://doi.org/10.3390/atmos12121702