
Visibility and Ceiling Nowcasting Using Artificial Intelligence Techniques for Aviation Applications

Abstract
1. Introduction
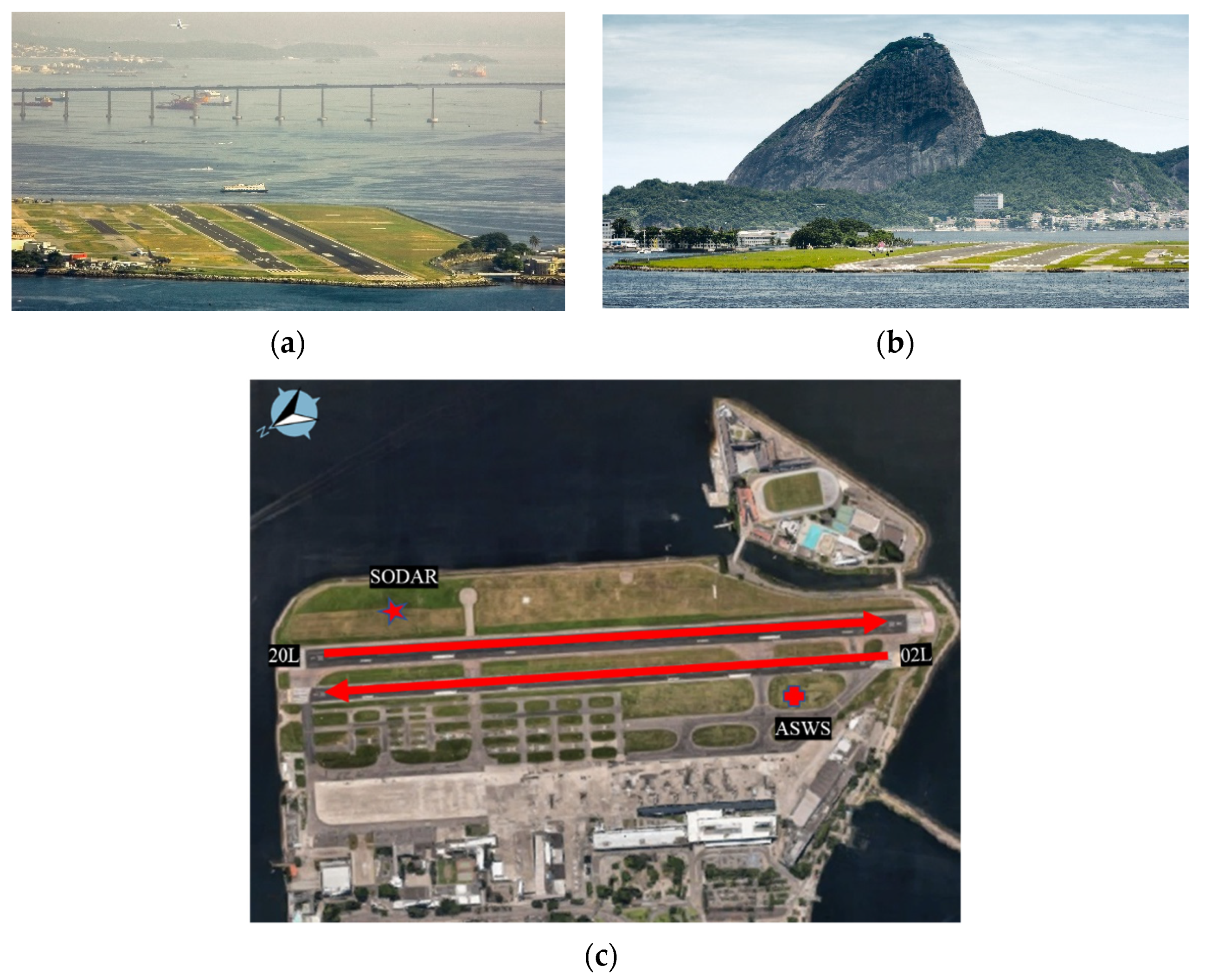
2. Project Site and Observations
3. Method
3.1. Detailed Analysis
- i.
- Taking the 15 min ASWS data as a reference, the other data were chronologically disposed, and then their statistical consistency was verified. Data were represented at 15, 30, 45 min for each hour, and all the observations were interpolated to the same time intervals (Table 2). Overall, the number of observations at 15 min intervals reached 350,400 data;
- ii.
- The history of event occurrences that were limited by the airport operating Vis and Hc threshold values were examined;
- iii.
- The inputs (the meteorological variables, primary and derived) were selected by measuring the cross-correlation between a given variable and the class (output), and then the redundant ones were eliminated;
- iv.
- Data sets were generated in order to train and test categorical and regression algorithms. For categorical data sets, the vector input was represented by variables (in columns 2 and 3 of Table 2), that met the intervals of Vis(t) ≤ 4500, 3700, 1600 m, connected to respective outputs associated with the advanced values of Vis(+t) for each prediction time of 15, 30, 45, and 60 min. These inputs were then connected to a binary output (target) of YES or NO, depending on whether the Vis intervals was satisfied. For regressive data sets, the vector inputs (variables) were directly coupled to the Vis(+t) or Hc(+t)/Cq(+t) values of each prediction time of 15, 30, 45, and 60 min (because of the uncertainty in the observation of ceiling data, only regressive algorithms were used for ceiling prediction);
- v.
- The data sets (categorical and regressive) were then randomly divided into 60% for training and 40% for testing the categorical and regressive algorithms, respectively. This is a frequent practice to avoid overfitting, which occurs when a statistical model fits previously observed data very well but fails to predict new results.
- vi.
- The YES and NO records of the categorical algorithms training dataset, defined in step v, were balanced through the WEKA ClassBalancer option in four configurations: (1) unmodified data set, (2) 50% YES, and 50% NO, (3) 60% YES and 40% NO, (4) 65% YES and 35% NO for the prediction times using operational thresholds. For regressive algorithms, the training test data sets were defined as in step iv without any artificial adjustment;
- vii.
- Cross-validation approach (this includes dividing the complete data set into k mutually exclusive subsets of the same size, one for testing and the remaining k-1 for parameter estimation and assessing the algorithm’s accuracy, [28]) was used to train all categorical algorithms available in WEKA, with the four training dataset configurations defined in step vi. Similarly, regressive algorithms were trained. The forecast preliminary findings were examined, and the algorithms with the highest performance (here referred to as selected ones) were chosen for future examination.
- viii.
- Using the proper test dataset to run the algorithm tests. Section 4.3, Section 4.4, Section 4.5, Section 4.6 discuss the results of the highest performing category and regressive selected algorithms with WEKA’s default configuration.
- ix.
- Training-test experiments for each prediction time were carried out using the categorical or regressive original data set with Auto-WEKA (version 2.0) [27]. In this tool, all available algorithms were tested and their hyperparameters optimized, which employs the unmodified dataset partitioned into 70% training and 30% testing (thus step iv is ignored here) [26]. Each experiment yielded a rank of the top-performing algorithms from best to worst.
3.2. Algorithm Evaluation
3.3. Characteristics of the Selected ML Algorithms
4. Results
4.1. Visibility Thresholds
4.2. Ceiling Thresholds
4.3. Algorithm Training and Results
4.4. Visibility Categorical Nowcasting
4.5. Visibility Regressive Nowcasting
4.6. Ceiling Nowcasting
5. Conclusions
- ML algorithms resulted in up to 20% better prediction in Vis when regressive techniques were used with a significant amount of reliable data;
- Training data sets need to be improved accurately in temporal and 16 spatial resolutions, and use of data from sensors (visibility meters, ceilometer, etc.) instead of human observations. When sensor observations were used in training, ML algorithms had more accurate Vis and Hc predictions;
- The 1 h Vis and Hc data obtained by observers may not follow the dynamics of some meteorological phenomena, impairing the assertiveness of the method. Furthermore, observations provide a spatial resolution for Vis, which may reduce the efficacy of the algorithm’s training compared to continuous sensor based Vis data. It is obvious that the lack of lengthier history series in the SODAR data profiles, the absence of visibility sensor usage, and the ceilometer’s inoperability since 2016 were all factors that led to the trained algorithm’s performance decline; and
- The ML methods proposed here can identify visibility and ceiling restrictions accurately, thus, they can improve the short-term forecasts of up to 1 h. Thus, the new ML-based methods can be considered an alternative to operational forecasts based on NWP models.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- DECEA. Relatório de Performance do Sistema de Controle do Espaço Aéreo Brasileiro (SISCEAB). 2018. Available online: http://especiais.decea.gov.br/performance/wp-content/uploads/2020/08/Rela_SISCEAB_ESTUDO-2_compressed.pdf (accessed on 4 January 2021).
- Gultepe, I.; Sharman, R.; Williams, P.D.; Zhou, B.; Ellrod, G.; Minnis, P.; Trier, S.; Griffin, S.; Yum, S.S.; Gharabaghi, B.; et al. A review of high impact weather for aviation meteorology. Pure Appl. Geophys. 2019, 176, 1869–1921. [Google Scholar] [CrossRef]
- Lima, J.S. Previsão de ocorrências de nevoeiros em Porto Alegre: Método objetivo, São José dos Campos: Instituto de Proteção ao Voo do Ministério da Aeronáutica. Tech. Rep. 1982, 18. [Google Scholar]
- Dias, M.A.F.S.; Machado, A.J. The role of local circulations in summertime convective development and nocturnal fog in São Paulo, Brazil. Bound.-Layer Meteorol. 1997, 82, 135–157. [Google Scholar] [CrossRef]
- Oliveira, G.A. Método Estatístico no Auxílio à Previsão de Nevoeiro Para o Aeroporto de Guarulhos. Master’s Thesis, Federal University of Santa Catarina, Florianópolis, Brazil, 2002. Available online: https://repositorio.ufsc.br/xmlui/bitstream/handle/123456789/83415/188292.pdf?sequence=1&isAllowed=y (accessed on 4 January 2021).
- França, V.D.J. Avaliação da Metodologia de Previsão de Nevoeiro e Visibilidade Horizontal do Modelo ETA. Master’s Thesis, National Institute for Space Research, São José do Campos, Brazil, 2008; p. 172. [Google Scholar]
- Fedorova, N.; Levit, V.; Fedorov, D. Fog and stratus formation on the coast of Brazil. Atmos. Res. 2008, 87, 268–278. [Google Scholar] [CrossRef]
- Fedorova, N.; Levit, V.; Silva, A.O.; Santos, D.M.B. Low Visibility formation and forecasting on the northern coast of Brazil. Pure Appl. Geophys. 2013, 170, 689–709. [Google Scholar] [CrossRef]
- Gultepe, I.; Tardif, R.; Michaelides, S.C.; Cermak, J.; Bott, A.; Bendix, J.; Müller, M.D.; Pagowski, M.; Hansen, B.; Ellrod, G.; et al. Fog research: A review of past achievements and future perspectives. J. Pure Appl. Geophys. 2007, 164, 1121–1159. [Google Scholar] [CrossRef]
- Gultepe, I.; Pagowski, M.; Reid, J. Using surface data to validate a satellite based fog detection scheme. J. Weather. Forecast. 2007, 22, 444–456. [Google Scholar] [CrossRef]
- Hansen, B. A fuzzy logic-based analog forecasting system for ceiling and visibility. Weather Forecast. 2007, 22, 1319–1330. [Google Scholar] [CrossRef]
- Claxton, B.M. Using a neural network to benchmark a diagnostic parameterization: The Met Office’s visibility scheme. Q. J. R. Meteorol. Soc. 2008, 134, 1527–1537. [Google Scholar] [CrossRef]
- Almeida, M.V. Aplicação de Técnicas de Redes Neurais Artificiais na Previsão de Curtíssimo Prazo da Visibilidade e Teto Para o Aeroporto de Guarulhos–SP. Ph.D. Thesis, Federal University of Rio de Janeiro, Rio de Janeiro, Brazil, 2009. Available online: http://www.coc.ufrj.br/pt/teses-de-doutorado/153-2009/1186-manoel-valdonel-de-almeida (accessed on 4 January 2021).
- Colabone, R.O.; Ferrari, A.L.; Vecchia., F.A.S.; Tech, A.R.B. Application of artificial neural networks for fog forecast. J. Aerosp. Technol. Manag. 2015, 7, 240–246. [Google Scholar] [CrossRef]
- França, G.B.; Almeida, M.V.; Bonnet, S.M.; Neto, F.L.A. Nowcasting model of low wind profile based on neural network using SODAR data at Guarulhos airport. Int. J. Remote Sens. 2018, 39, 2506–2517. [Google Scholar] [CrossRef]
- Freitas, J.H.V.; França, G.B.; Menezes, W.F. Convection forecasting using decision tree in Rio de Janeiro metropolitan area. Anuário IGEO 2018, 42, 127–134. [Google Scholar] [CrossRef]
- Almeida, V.A.; França, G.B.; Velho, H.F.C. Short-range forecasting system for meteorological convective events in Rio de Janeiro using remote sensing of atmospheric discharges. Int. J. Remote Sens. 2020, 41, 4372–4388. [Google Scholar] [CrossRef]
- Platenik, J.E.G.; França, G.B.; Neto, A.V.P.; da Silva, R.M.; de Almeida, V.A. Previsão de Nevoeiro Utilizando Multicritérios Baseados em Simulações do Modelo WRF para o Aeroporto Internacional Afonso Pena. Anuário IGEO 2020, 43, 376–383. [Google Scholar] [CrossRef]
- Zhou, B.; Du, J.; Gultepe, I.; Dimego, G. Forecast of Low Visibility and Fog from NCEP: Current Status and Efforts. Pure Appl. Geophys. 2012, 169, 895–909. [Google Scholar] [CrossRef]
- Da Rocha, R.P.; Gonçalves, F.L.T.; Segalin, B. Fog Events and local atmospheric features simulated by regional climate model for the metropolitan area of São Paulo, Brazil. Atmos. Res. 2015, 151, 176–188. [Google Scholar] [CrossRef]
- Perini, A.B.; Filho, D.P.P.; Rodrigues, E.S.; Amaral, F.S.; Reichert, R.F.L. Anuário Estatístico Operacional 2018. INFRAERO. 2019. Available online: https://www4.infraero.gov.br/media/677124/anuario_2018.pdf (accessed on 4 January 2021).
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006; ISBN 978-0-387-31073-2. [Google Scholar]
- Silva, W.L.; Neto, F.L.A.; França, G.B.; Matschinske, M.R. Conceptual model for runway change procedure in Guarulhos International Airport based on SODAR data. Aeronaut. J. 2016, 120, 725–734. [Google Scholar] [CrossRef][Green Version]
- Almeida, V.A.; França, G.B.; Velho, H.F.C. Data assimilation for nowcasting in the terminal area of Rio de Janeiro. Ciência Nat. 2020, 42, e40. [Google Scholar] [CrossRef]
- Witten, I.H.; Frank, E.; Hall, M.A.; Pal, C.J. Data Mining: Practical Machine Learning Tools and Techniques, 4th ed.; Morgan Kaufmann: Sydney, Australia, 2016; ISBN 978-0-12-804291-5. [Google Scholar]
- Thornton, C.; Hutter, F.; Hoos, H.H.; Leyton-Brown, K. Auto-WEKA: Combined selection and hyperparameter optimization of classification algorithms. In Proceedings of the 19th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining—KDD ’13, Chicago, IL, USA, 11–14 August 2013; pp. 847–855. [Google Scholar] [CrossRef]
- Kotthof, L.; Thornton, C.; Hoos, H.H.; Hutter, F.; Leyton-Brown, K. Auto-WEKA 2.0: Automatic model selection and hyperparameter optimization in WEKA. J. Mach. Learn. Res. 2016, 17, 1–5. [Google Scholar]
- Holmes, G.; Donkin, A.; Witten, I.H. WEKA: A machine learning workbench. In Proceedings of the ANZIIS ‘94-Australian New Zealand Intelligent Information Systems Conference, Brisbane, Australia, 29 November–2 December 1994; pp. 357–361. [Google Scholar] [CrossRef]
- Wilks, D.S. Statistical Methods in the Atmospheric Sciences, 2nd ed.; Academic Press: London, UK, 2006. [Google Scholar]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Lang. 2001, 45, 5–32. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Landing Procedure | Runway | |
|---|---|---|
| 20 | 2 | |
| (1) RNAV/GNSS | 4500 m/1000 feet | 5000 m/1000 feet |
| (2) NDB | 3700 m/1200 feet | 4800 m/1500 feet |
| (3) RNAV/RNP | 1600 m/300 feet | 1600 m/300 feet |
| Source Freq. (min) | (Input) Variable | Variabl qty. | Record qty. | Data Period | Output | ||
|---|---|---|---|---|---|---|---|
| Primary Derived | |||||||
| (1) | 15 | β (h,−t), where h and t are equal to 30, 40, 50, 60 e 70 m and 0, 15, 30, 45, 60 and 120 min, respectively | u (h,−t), v (h,−t), wa (h,−t), EDR (h,−t) and TKE (h,t), where h and t are equal to 30, 40, 50, 60 e 70 m and 0, 15, 30, 45, 60 and 120 min, respectively | 150 | 70,080 | 2017 to 2018 | Visibility-range-t (where range is equal to 4500, 3700, 1600 m) and/or Ceiling-range-t (being equal to 1000 ft)/cloudquant (okta) for forecast periods (where t is equal to 15, 30, 45 and 60 min). |
| (2) | 15 * | Month, Julian day, year, hour, Ta (h,t), θdir (h,−t), Uh (h,−t), RHw (h,−t), Td (h,−t), Ps (h,t) and RHw (h,t), Hc (t) *, where h and t is equal 2 and 0,15, 30, 45, 60 and 120 min), respectively | ----------- | 73 | 350,400 | 2009 to 2018 | |
| (3) | 60 ** | ----- | Vis (−t), Ceiling (−t), Cq (−t), Cc (−t), Clcc (−t), where t is equal to 0, 15, 30, 45, 60 and 120 min | 30 | 87,600 | 2009 to 2018 | |
| Alg | Input Data | POD (YES) | 1-FAR (YES) | F-M (YES) | BIAS (YES) | POD (NO) | 1-FAR (NO) | F-M (NO) | BIAS (NO) | KAPPA | Data Set Configuration |
|---|---|---|---|---|---|---|---|---|---|---|---|
| BN | 2 and 3 | 0.83 | 0.99 | 0.72 | 0.77 | 0.99 | 0.83 | 0.99 | 0.99 | 0.71 | 4 |
| MP | 2 and 3 | 0.88 | 1.00 | 0.91 | 1.04 | 1.00 | 0.88 | 1.00 | 1.00 | 0.90 | 1 |
| RF | 2 and 3 | 0.91 | 1.00 | 0.91 | 0.99 | 1.00 | 0.91 | 1.00 | 1.00 | 0.91 | Auto-WEKA |
| HT | 2 and 3 | 0.91 | 1.00 | 0.91 | 1.00 | 1.00 | 0.91 | 1.00 | 1.00 | 0.91 | 1 |
| RT | 2 and 3 | 0.89 | 1.00 | 0.90 | 1.03 | 1.00 | 0.89 | 1.00 | 1.00 | 0.90 | 1 |
| RF | 1, 2 and 3 | 0.89 | 1.00 | 0.89 | 1.00 | 1.00 | 0.89 | 1.00 | 1.00 | 0.89 | Auto-WEKA |
| Alg | Input Data | POD (YES) | 1-FAR (YES) | F-M (YES) | BIAS (YES) | POD (NO) | 1-FAR (NO) | F-M (NO) | BIAS (NO) | KAPPA | Data Set Configuration |
|---|---|---|---|---|---|---|---|---|---|---|---|
| BN | 2 and 3 | 0.89 | 0.97 | 0.37 | 0.26 | 0.97 | 0.89 | 0.98 | 0.97 | 0.36 | 1 |
| MP | 2 and 3 | 0.84 | 1.00 | 0.88 | 1.10 | 1.00 | 0.84 | 1.00 | 1.00 | 0.88 | 1 |
| RF | 2 and 3 | 0.88 | 1.00 | 0.89 | 1.01 | 1.00 | 0.88 | 1.00 | 1.00 | 0.88 | 3 |
| HT | 2 and 3 | 0.82 | 1.00 | 0.86 | 1.12 | 1.00 | 0.82 | 1.00 | 1.00 | 0.86 | 1 |
| RT | 2 and 3 | 0.85 | 1.00 | 0.89 | 1.09 | 1.00 | 0.85 | 1.00 | 1.00 | 0.88 | 1 |
| RF | 1, 2 and 3 | 0.85 | 1.00 | 0.85 | 1.00 | 1.00 | 0.85 | 1.00 | 1.00 | 0.89 | Auto-WEKA |
| Alg. | Input Data | POD (YES) | 1-FAR (YES) | F-M (YES) | BIAS (YES) | POD (NO) | 1-FAR (NO) | F-M (NO) | BIAS (NO) | KAPPA | Data Set Configuration |
|---|---|---|---|---|---|---|---|---|---|---|---|
| BN | 2 and 3 | 0.88 | 0.99 | 0.43 | 0.32 | 0.99 | 0.88 | 1.00 | 0.99 | 0.42 | 1 |
| MP | 2 and 3 | 0.68 | 1.00 | 0.78 | 1.34 | 1.00 | 0.68 | 1.00 | 1.00 | 0.78 | 1 |
| RF | 2 and 3 | 0.88 | 1.00 | 0.89 | 1.02 | 1.00 | 0.88 | 1.00 | 1.00 | 0.89 | Auto-WEKA |
| HT | 2 and 3 | 0.56 | 1.00 | 0.67 | 1.50 | 1.00 | 0.56 | 1.00 | 1.00 | 0.67 | 1 |
| RT | 2 and 3 | 0.89 | 1.00 | 0.89 | 1.00 | 1.00 | 0.89 | 1.00 | 1.00 | 0.89 | 1 |
| RF | 1, 2 and 3 | 0.89 | 1.00 | 0.89 | 1.00 | 1.00 | 0.89 | 1.00 | 1.00 | 0.89 | Auto-WEKA |
| Alg | Input Data | POD (YES) | 1-FAR (YES) | F-M (YES) | BIAS (YES) | POD (NO) | 1-FAR (NO) | F-M (NO) | BIAS (NO) | KAPPA | Data Set Configuration |
|---|---|---|---|---|---|---|---|---|---|---|---|
| BN | 2 and 3 | 0.84 | 0.95 | 0.49 | 0.42 | 0.95 | 0.84 | 0.97 | 0.96 | 0.47 | 1 |
| MP | 2 and 3 | 0.75 | 1.00 | 0.80 | 1.15 | 1.00 | 0.75 | 0.99 | 1.00 | 0.79 | 1 |
| RF | 2 and 3 | 0.82 | 0.99 | 0.81 | 1.00 | 0.99 | 0.82 | 0.99 | 1.00 | 0.81 | Auto-WEKA |
| HT | 2 and 3 | 0.77 | 0.99 | 0.79 | 1.05 | 0.99 | 0.77 | 0.99 | 1.00 | 0.78 | 1 |
| RT | 2 and 3 | 0.74 | 1.00 | 0.78 | 1.12 | 1.00 | 0.74 | 0.99 | 1.00 | 0.78 | 1 |
| RF | 1, 2 and 3 | 0.82 | 1.00 | 0.87 | 1.13 | 1.00 | 0.82 | 1.00 | 1.00 | 0.87 | Auto-WEKA |
| Alg | Input Data | POD (YES) | 1-FAR (YES) | F-M (YES) | BIAS (YES) | POD (NO) | 1-FAR (NO) | F-M (NO) | BIAS (NO) | KAPPA | Data Set Configuration |
|---|---|---|---|---|---|---|---|---|---|---|---|
| BN | 2 and 3 | 0.84 | 0.96 | 0.30 | 0.21 | 0.96 | 0.84 | 0.98 | 0.96 | 0.28 | 1 |
| MP | 2 and 3 | 0.61 | 1.00 | 0.70 | 1.39 | 1.00 | 0.61 | 1.00 | 1.00 | 0.70 | 1 |
| RF | 2 and 3 | 0.75 | 1.00 | 0.77 | 1.05 | 1.00 | 0.75 | 1.00 | 1.00 | 0.76 | 4 |
| HT | 2 and 3 | 0.67 | 0.99 | 0.61 | 0.83 | 0.99 | 0.67 | 1.00 | 1.00 | 0.60 | 1 |
| RT | 2 and 3 | 0.64 | 1.00 | 0.72 | 1.27 | 1.00 | 0.64 | 1.00 | 1.00 | 0.72 | 1 |
| RF | 1, 2 and 3 | 0.71 | 1.00 | 0.71 | 1.00 | 1.00 | 0.71 | 1.00 | 1.00 | 0.78 | Auto-WEKA |
| Alg | Input Data | POD (YES) | 1-FAR (YES) | F-M (YES) | BIAS (YES) | POD (NO) | 1-FAR (NO) | F-M (NO) | BIAS (NO) | KAPPA | Data Set Configuration |
|---|---|---|---|---|---|---|---|---|---|---|---|
| BN | 2 and 3 | 0.81 | 0.99 | 0.32 | 0.24 | 0.99 | 0.81 | 1.00 | 0.99 | 0.31 | 1 |
| MP | 2 and 3 | 0.41 | 1.00 | 0.56 | 2.17 | 1.00 | 0.41 | 1.00 | 1.00 | 0.55 | 1 |
| RF | 2 and 3 | 0.73 | 1.00 | 0.76 | 1.11 | 1.00 | 0.73 | 1.00 | 1.00 | 0.76 | 3 |
| HT | 2 and 3 | 0.17 | 0.94 | 0.02 | 0.05 | 0.94 | 0.17 | 0.97 | 0.94 | 0.01 | 3 |
| RT | 2 and 3 | 0.66 | 0.34 | 0.76 | 1.39 | 1.00 | 1.00 | 1.00 | 1.00 | 0.76 | 1 |
| RF | 1, 2 and 3 | 0.88 | 1.00 | 0.92 | 1.10 | 1.00 | 0.88 | 1.00 | 1.00 | 0.71 | Auto-WEKA |
| Algorithm | Prediction Time (min) | Input Data Source | CC | MAE (m) | RAE |
|---|---|---|---|---|---|
| RF | 15 | 1, 2 and 3 | 0.99 | 198.58 | 0.04 |
| RF | 15 | 2 and 3 | 0.99 | 189.85 | 0.04 |
| RF | 30 | 1, 2 and 3 | 0.99 | 304.86 | 0.06 |
| RF | 30 | 2 and 3 | 0.99 | 291.38 | 0.06 |
| RF | 45 | 1, 2 and 3 | 0.99 | 378.70 | 0.08 |
| RF | 45 | 2 and 3 | 0.99 | 351.85 | 0.07 |
| RF | 60 | 1, 2 and 3 | 0.99 | 409.32 | 0.08 |
| RF | 60 | 2 and 3 | 0.99 | 343.88 | 0.07 |
| Algorithm | Prediction Time (min) | Input Data Source | CC | MAE (ft/okta) | RAE |
|---|---|---|---|---|---|
| RF | 15 | 2 and 3 | 0.97 | 126.13 feet | 0.1 |
| RF | 15 | 2 and 3 | 0.86 | 0.55 okta | 0.32 |
| RF | 30 | 2 and 3 | 0.97 | 166.02 feet | 0.14 |
| RF | 30 | 2 and 3 | 0.81 | 0.69 okta | 0.4 |
| RF | 45 | 2 and 3 | 0.96 | 182.95 feet | 0.15 |
| RF | 45 | 2 and 3 | 0.83 | 0.63 okta | 0.37 |
| RF | 60 | 2 and 3 | 0.96 | 195.19 feet | 0.16 |
| RF | 60 | 2 and 3 | 0.77 | 0.77 okta | 0.44 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cordeiro, F.M.; França, G.B.; de Albuquerque Neto, F.L.; Gultepe, I. Visibility and Ceiling Nowcasting Using Artificial Intelligence Techniques for Aviation Applications. Atmosphere 2021, 12, 1657. https://doi.org/10.3390/atmos12121657
Cordeiro FM, França GB, de Albuquerque Neto FL, Gultepe I. Visibility and Ceiling Nowcasting Using Artificial Intelligence Techniques for Aviation Applications. Atmosphere. 2021; 12(12):1657. https://doi.org/10.3390/atmos12121657
Chicago/Turabian StyleCordeiro, Fabricio Magalhães, Gutemberg Borges França, Francisco Leite de Albuquerque Neto, and Ismail Gultepe. 2021. "Visibility and Ceiling Nowcasting Using Artificial Intelligence Techniques for Aviation Applications" Atmosphere 12, no. 12: 1657. https://doi.org/10.3390/atmos12121657
APA StyleCordeiro, F. M., França, G. B., de Albuquerque Neto, F. L., & Gultepe, I. (2021). Visibility and Ceiling Nowcasting Using Artificial Intelligence Techniques for Aviation Applications. Atmosphere, 12(12), 1657. https://doi.org/10.3390/atmos12121657