Towards a Better Design of Convection-Allowing Ensembles for Precipitation Forecasts over Ensenada, Baja California, Mexico



Abstract
1. Introduction
2. Data and Methods
2.1. Spatial and Temporal Coverage of the Case Study
2.2. Initial and Boundary Conditions of the WRF Model
2.3. Observational Data at the Meteorological Station and Imerg
2.4. Ensemble Members Design
- C: control run,
- O: random initial perturbations using RANDOMCV from WRF Data Assimilation (WRFDA),
- B: initial conditions perturbed using the breeding technique [12], or
- S: using the Stochastic Kinetic Energy Backscatter Scheme (SKEBS).
2.5. Set-Up of the WRF Model
2.6. Ensemble-Member Perturbation Methods
2.6.1. Random Perturbations
2.6.2. Stochastic Kinetic Energy Backscatter
2.6.3. Breeding
2.7. Methods for Perturbations Analysis
2.7.1. Lyapunov Exponent Method
2.7.2. Information Entropy Method
2.8. Verification Metrics
3. Results and Discussion
3.1. Analysis of Initial Perturbations and Perturbation Growth
3.1.1. The Growth Rate of The Perturbations
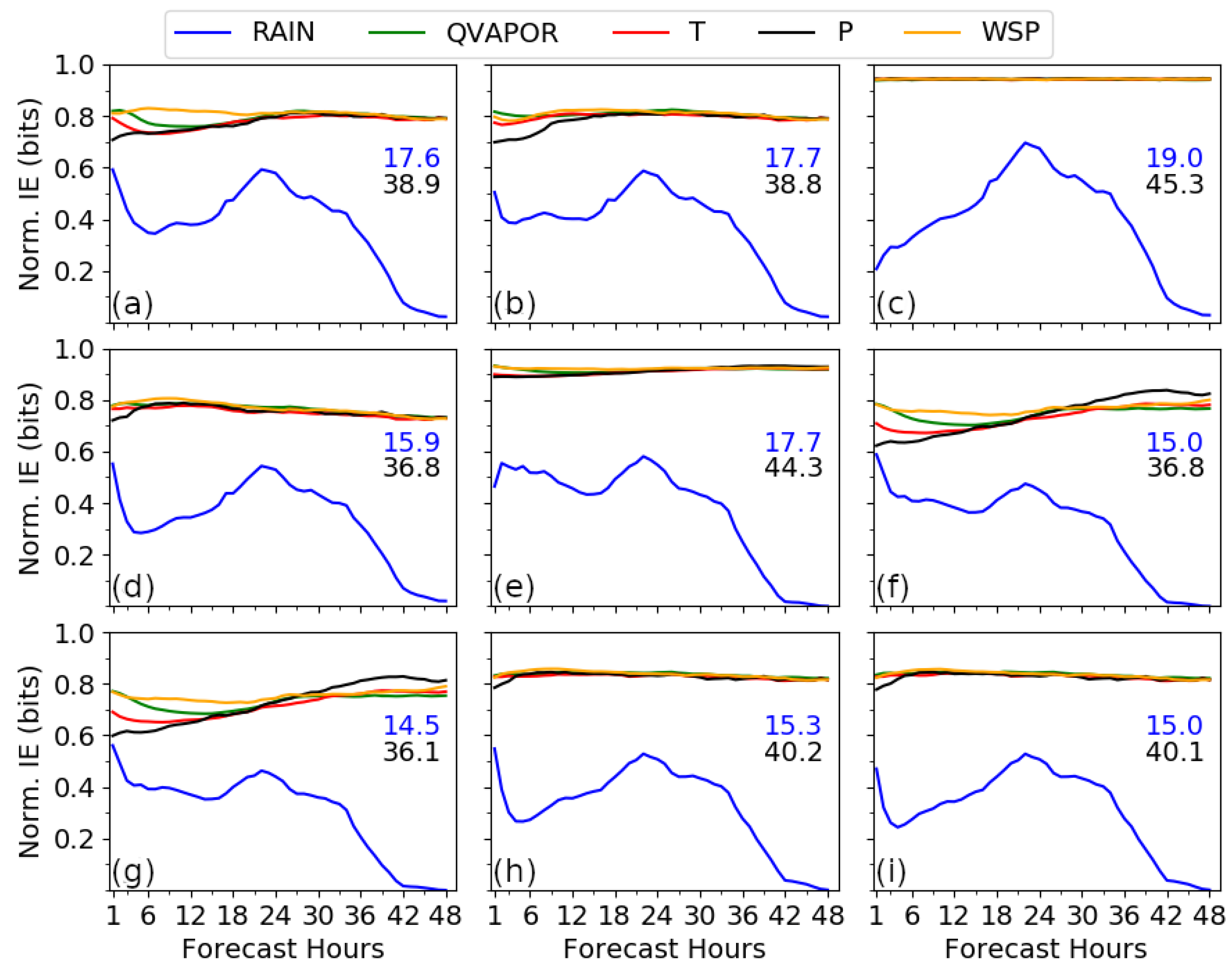
3.1.2. Information Entropy
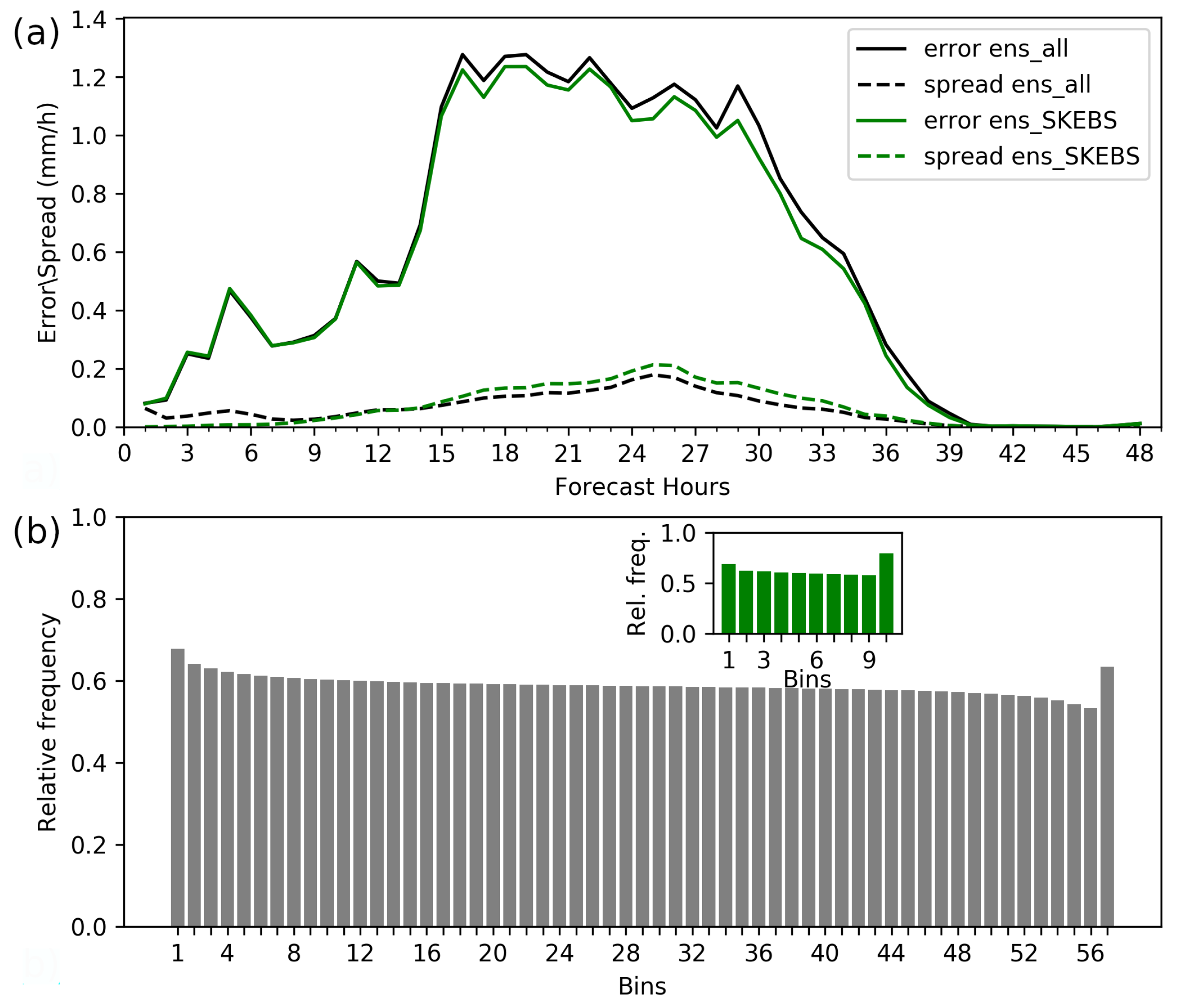
3.2. Verification Analysis
3.3. Verification of the Full Ensemble against the Ensemble of Selected Members
4. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gebhardt, C.; Theis, S.; Krahe, P.; Renner, V. Experimental ensemble forecasts of precipitation based on a convection-resolving model. Atmos. Sci. Lett. 2008, 9, 67–72. [Google Scholar] [CrossRef]
- Johnson, A.; Wang, X.; Kong, F.; Xue, M. Hierarchical Cluster Analysis of a Convection-Allowing Ensemble during the Hazardous Weather Testbed 2009 Spring Experiment. Part I: Development of the Object-Oriented Cluster Analysis Method for Precipitation Fields. Mon. Weather Rev. 2011, 139, 3673–3693. [Google Scholar] [CrossRef][Green Version]
- Duda, J.D.; Wang, X.; Kong, F.; Xue, M. Using Varied Microphysics to Account for Uncertainty in Warm-Season QPF in a Convection-Allowing Ensemble. Mon. Weather Rev. 2014, 142, 2198–2219. [Google Scholar] [CrossRef]
- Schwartz, C.S.; Romine, G.S.; Smith, K.R.; Weisman, M.L. Characterizing and optimizing precipitation forecasts from a convection-permitting ensemble initialized by a mesoscale ensemble Kalman filter. Weather Forecast. 2014, 29, 1295–1318. [Google Scholar] [CrossRef]
- Klasa, C.; Arpagaus, M.; Walser, A.; Wernli, H. An evaluation of the convection-permitting ensemble COSMO-E for three contrasting precipitation events in Switzerland. Q. J. R. Meteorol. Soc. 2018, 144, 744–764. [Google Scholar] [CrossRef]
- Fosser, G.; Kendon, E.; Chan, S.; Lock, A.; Roberts, N.; Bush, M. Optimal configuration and resolution for the first convection-permitting ensemble of climate projections over the United Kingdom. Int. J. Climatol. 2019. [Google Scholar] [CrossRef]
- Porson, A.N.; Hagelin, S.; Boyd, D.F.A.; Roberts, N.M.; North, R.; Webster, S.; Lo, J.C.F. Extreme rainfall sensitivity in convective-scale ensemble modelling over Singapore. Q. J. R. Meteorol. Soc. 2019, 145, 3004–3022. [Google Scholar] [CrossRef]
- Clark, A.J.; Kain, J.S.; Stensrud, D.J.; Xue, M.; Kong, F.; Coniglio, M.C.; Thomas, K.W.; Wang, Y.; Brewster, K.; Gao, J.; et al. Probabilistic precipitation forecast skill as a function of ensemble size and spatial scale in a convection-allowing ensemble. Mon. Weather Rev. 2011, 139, 1410–1418. [Google Scholar] [CrossRef]
- Schellander-Gorgas, T.; Wang, Y.; Meier, F.; Weidle, F.; Wittmann, C.; Kann, A. On the forecast skill of a convection-permitting ensemble. Geosci. Model Dev. 2017, 10, 35–56. [Google Scholar] [CrossRef]
- Du, J.; Mullen, S.L.; Sanders, F. Short-range ensemble forecasting of quantitative precipitation. Mon. Weather Rev. 1997, 125, 2427–2459. [Google Scholar] [CrossRef]
- Toth, Z.; Kalnay, E. Ensemble forecasting at NMC: The generation of perturbations. Bull. Am. Meteorol. Soc. 1993, 74, 2317–2330. [Google Scholar] [CrossRef]
- Toth, Z.; Kalnay, E. Ensemble Forecasting at NCEP and the Breeding Method. Mon. Weather. Rev. 1997, 125, 3297–3319. [Google Scholar] [CrossRef]
- Leutbecher, M. On ensemble prediction using singular vectors started from forecasts. Mon. Weather Rev. 2005, 133, 3038–3046. [Google Scholar] [CrossRef]
- Krishnamurti, T.N.; Kishtawal, C.M.; Zhang, Z.; LaRow, T.; Bachiochi, D.; Williford, E.; Gadgil, S.; Surendran, S. Multimodel ensemble forecasts for weather and seasonal climate. J. Clim. 2000, 13, 4196–4216. [Google Scholar] [CrossRef]
- Evans, R.E.; Harrison, M.S.J.; Graham, R.J.; Mylne, K.R. Joint medium-range ensembles from the Met. Office and ECMWF systems. Mon. Weather Rev. 2000, 128, 3104–3127. [Google Scholar] [CrossRef]
- Buizza, R.; Milleer, M.; Palmer, T.N. Stochastic representation of model uncertainties in the ECMWF ensemble prediction system. Q. J. R. Meteorol. Soc. 1999, 125, 2887–2908. [Google Scholar] [CrossRef]
- Shutts, G.J. A kinetic energy backscatter algorithm for use in ensemble prediction systems. Q. J. R. Meteorol. Soc. 2005, 612, 3079–3102. [Google Scholar] [CrossRef]
- Bouttier, F.; Vié, B.; Nuissier, O.; Raynaud, L. Impact of stochastic physics in a convection-permitting ensemble. Mon. Weather Rev. 2012, 140, 3706–3721. [Google Scholar] [CrossRef]
- Romine, G.S.; Schwartz, C.S.; Berner, J.; Fossell, K.R.; Snyder, C.; Anderson, J.L.; Weisman, M.L. Representing Forecast Error in a Convection-Permitting Ensemble System. Mon. Weather Rev. 2014, 142, 4519–4541. [Google Scholar] [CrossRef]
- Duda, J.F.; Wang, X.; Kong, F.; Xue, M.; Berner, J. Impact of a Stochastic Kinetic Energy Backscatter Scheme on Warm Season Convection-Allowing Ensemble Forecasts. Mon. Weather Rev. 2016, 144, 1887–1908. [Google Scholar] [CrossRef]
- Berner, J.; Achatz, U.; Batte, L.; Bengtsson, L.; de la Cámara, A.; Christensen, H.M.; Colangeli, M.; Coleman, D.R.B.; Crommelin, D.; Dolaptchiev, S.I.; et al. Stochastic parameterization: Toward a new view of weather and climate models. Bull. Am. Meteorol. Soc. 2017, 98, 565–588. [Google Scholar] [CrossRef]
- Du, J.; Berner, J.; Buizza, R.; Charron, M.; Houtekamer, P.; Hou, D.; Isidora, J.; Mu, M.; Wang, X.; Wei, M.; et al. Ensemble methods for meteorological predictions. NCEP Office Notes 2018, 493. [Google Scholar] [CrossRef]
- Bowler, N.E. Comparison of error breeding, singular vectors, random perturbations and ensemble Kalman filter perturbation strategies on a simple model. Tellus 2006, 58A, 538–548. [Google Scholar] [CrossRef]
- Magnusson, L.; Källén, E.; Nycander, J. Initial state perturbations in ensemble forecasting. Nonlin. Processes Geophys. 2008, 15, 751–759. [Google Scholar] [CrossRef]
- Greybush, S.J.; Saslo, S.; Grumm, R. Assessing the ensemble predictability of precipitation forecasts for the January 2015 and 2016 East Coast winter storms. Weather Forecast. 2017, 32, 1057–1078. [Google Scholar] [CrossRef]
- Li, C.H.; Berner, J.; Hong, J.S.; Fong, C.T.; Kuo, Y.H. The Taiwan WRF Ensemble Prediction System: Scientific Description, Model-Error Representation and Performance Results. Asia-Pac. J. Atmos. Sci. 2019. [Google Scholar] [CrossRef]
- Berner, J.; Fossel, K.R.; Ha, S.Y.; Hacker, J.P.; Snyder, C. Increasing the skill of probabilistic forecasts: understanding performance improvements from model-error representations. Mon. Weather Rev. 2015, 143, 1295–1320. [Google Scholar] [CrossRef]
- Jankov, I.; Berner, J.; Beck, J.; Jiang, H.; Olson, J.B.; Grell, G.; Smirnova, T.G.; Benjamin, S.G.; Brown, J.M. A performance comparison between multiphysics and stochastic approaches within a North American RAP ensemble. Mon. Weather Rev. 2017, 145, 1161–1179. [Google Scholar] [CrossRef]
- Méndez-Turrubiates, R.F.; Gross, M.; Magar, V. Local Quantitative Precipitation Forecasts with Minimal Data Requirement – An Ensemble Approach. Weather Forecast. 2020, 35, 821–839. [Google Scholar] [CrossRef]
- Guo, Y.R.; Lin, H.C.; Ma, X.X.; Huang, X.Y.; Terng, C.T.; Kuo, Y.H. Impact of WRF-Var (3DVar) background error statistics on typhoon analysis and forecast. In Seventh WRF Users’ Workshop; NCAR: Boulder, CO, USA, 2006. [Google Scholar]
- Pannekoucke, O.; Berre, L.; Desroziers, G. Background-error correlation length-scale estimates and their sampling statistics. Q. J. R. Meteorol. Soc. A J. Atmos. Sci. Appl. Meteorol. Phys. Oceanogr. 2008, 134, 497–508. [Google Scholar] [CrossRef]
- National Centers for Environmental Prediction National Weather Service, NOAA, U.S. Department of Commerce (NCEP). NCEP North American Mesoscale (NAM) 12 km Analysis; Research Data Archive at the National Center for Atmospheric Research, Computational and Information Systems Labortory: Boulder, CO, USA, 2014. [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D. Integrated Multi-SatellitE Retrievals for GPM (IMERG). NASA’s Precipitation Processing Center. 2014. Available online: https://storm.pps.eosdis.nasa.gov/storm/ (accessed on 8 September 2020).
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Wang, W.; Power, J.G. A description of the Advanced Research WRF version 3. NCAR Technical Note 2008. [Google Scholar] [CrossRef]
- Stensrud, D.J. Parameterization Schemes: Keys to Understanding Numerical Weather Prediction Models; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Hsiao, L.F.; Yang, M.J.; Lee, C.S.; Kuo, H.C.; Shih, D.S.; Tsai, C.C.; Wang, C.J.; Chang, L.Y.; Chen, D.Y.C.; Feng, L.; et al. Ensemble forecasting of typhoon rainfall and floods over a mountainous watershed in Taiwan. J. Hydrol. 2013, 506, 55–68. [Google Scholar] [CrossRef]
- Thompson, G.; Field, P.R.; Rasmussen, R.M.; Hall, W.D. Explicit Forecasts of Winter Precipitation Using an Improved Bulk Microphysics Scheme. Part II: Implementation of a New Snow Parameterization. Mon. Weather Rev. 2008, 136, 5095–5115. [Google Scholar] [CrossRef]
- Tan, E. Microphysics parameterization sensitivity of the WRF Model version 3.1.7 to extreme precipitation: evaluation of the 1997 New Year’s flood of California. Geosci. Model Dev. Discuss. 2016, 1–29. [Google Scholar] [CrossRef]
- Hong, S.Y.; Noh, Y.; Dudhia, J. A new vertical diffusion package with an explicit treatment of entrainment processes. Mon. Weather Rev. 2006, 134, 2318–2341. [Google Scholar] [CrossRef]
- Hu, X.M.; Nielsen-Gammon, J.W.; Zhang, F. Evaluation of three planetary boundary layer schemes in the WRF model. J. Appl. Meteor. Climatol. 2010, 49, 1831–1844. [Google Scholar] [CrossRef]
- Iacono, M.J.; Delamere, J.S.; Mlawer, E.J.; Shephard, M.W.; Clough, S.A.; Collins, W.D. Radiative forcing by long-lived greenhouse gases: Calculations with the AER radiative transfer models. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Jiménez, P.A.; Dudhia, J.; González-Rouco, J.F.; Navarro, J.; Montávez, J.P.; García-Bustamante, E. A revised scheme for the WRF surface layer formulation. Mon. Weather Rev. 2012, 140, 898–918. [Google Scholar] [CrossRef]
- Fairall, C.W.; Bradley, E.F.; Hare, J.E.; Grachev, A.A.; Edson, J.B. Bulk parameterization of air–sea fluxes: Updates and verification for the COARE algorithm. J. Clim. 2003, 16, 571–591. [Google Scholar] [CrossRef]
- Lynch, P. The Dolph–Chebyshev window: A simple optimal filter. Mon. Weather Rev. 1997, 125, 655–660. [Google Scholar] [CrossRef][Green Version]
- Kain, J.S. The Kain–Fritsch convective parameterization: An update. J. Appl. Meteorol. 2004, 43, 170–181. [Google Scholar] [CrossRef]
- Hong, S.Y.; Dudhia, J.; Chen, S.H. A revised approach to ice microphysical processes for the bulk parameterization of clouds and precipitation. Mon. Weather Rev. 2004, 132, 103–120. [Google Scholar] [CrossRef]
- Descombes, G.; Auligné, T.; Vandenberghe, F.; Barker, D.M.; Barre, J. Generalized background error covariance matrix model (GEN_BE v2. 0). Geosci. Model Dev. 2015, 8, 669–696. [Google Scholar] [CrossRef]
- Parrish, D.F.; Derber, J.C. The National Meteorological Center’s spectral statistical interpolation analysis system. Mon. Weather Rev. 1992, 120, 1747–1763. [Google Scholar] [CrossRef]
- Berner, J.; Shutts, G.J.; Leutbecher, M.; Palmer, T.N. A spectral stochastic kinetic energy backscatter scheme and its impact on flow-dependent predictability in the ECMWF ensemble prediction system. J. Atmos. Sci. 2009, 66, 603–626. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic Nonperiodic Flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Blázquez, J.; Pessacg, N.L.; Gonzalez, P.L.M. Simulation of a baroclinic wave with the WRF regional model: Sensitivity to the initial conditions in an ideal and a real experiment. Meteorol. Appl. 2013, 20, 447–456. [Google Scholar] [CrossRef]
- DelSole, T. Predictability and information theory. Part II: Imperfect forecasts. J. Atmos. Sci. 2005, 62, 3368–3381. [Google Scholar] [CrossRef]
- MacKay, D.J.C. Information Theory, Inference and Learning Algorithms; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Ma, S.; Chen, C.; He, H.; Xiang, J.; Chen, S.; Li, Y.; Jiang, Y.; Wu, D.; Luo, H. An Analysis on Perturbation Features of Convection-Allowing Ensemble Prediction Based on the Local Breeding Growth Mode. Weather Forecast. 2019, 34, 289–304. [Google Scholar] [CrossRef]
- Silverman, B.W. Density Estimation for Statistics and Data Analysis; Chapman & Hall/CRC: Boca Raton, FL, USA, 1998. [Google Scholar]
- Wilks, D.S. Statistical Methods in the Atmospheric Sciences, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2011; p. 676. [Google Scholar]
- Hohenegger, C.; Schär, C. Predictability and Error Growth Dynamics in Cloud-Resolving Models. J. Atmos. Sci. 2007, 64, 4467–4478. [Google Scholar] [CrossRef]
- Kühnlein, C.; Keil, C.; Craig, G.C.; Gebhardt, C. The impact of downscaled initial condition perturbations on convective-scale ensemble forecasts of precipitation. Q. J. R. Meteorol. Soc. 2014, 140, 1552–1562. [Google Scholar] [CrossRef]
- Trevisan, A. Impact of Transient Error Growth on Global Average Predictability Measures. J. Atmos. Sci. 1993, 50, 1016–1028. [Google Scholar] [CrossRef]
- Copernicus Climate Change Service (C3S). ERA5-Land Reanalysis. Available online: http://doi.org/10.24381/cds.e2161bac (accessed on 8 September 2020).
- Mayor, Y.G.; Tereshchenko, I.; Fonseca-Hernández, M.; Pantoja, D.; Montes, J. Evaluation of error in IMERG precipitation estimates under different topographic conditions and temporal scales over Mexico. Remote Sens. 2017, 9, 503. [Google Scholar] [CrossRef]
- Asong, Z.; Razavi, S.; Wheater, H.S.; Wong, J.S. Evaluation of integrated multisatellite retrievals for GPM (IMERG) over southern Canada against ground precipitation observations: A preliminary assessment. J. Hydrometeorol. 2017, 18, 1033–1050. [Google Scholar] [CrossRef]
- Chen, X.; Yuan, H.; Xue, M. Spatial spread-skill relationship in terms of agreement scales for precipitation forecasts in a convection-allowing ensemble. Q. J. R. Meteorol. Soc. 2017, 144. [Google Scholar] [CrossRef]
- Jolliffe, I.T.; Stephenson, D. Forecast Verification. A Practitioner’s Guide in Atmospheric Science, 2nd ed.; Wiley and Sons Ltd.: Hoboken, NJ, USA, 2012. [Google Scholar]
- Abhilash, S.; Sahai, A.K.; Borah, N.; Joseph, S.; Chattopadhyay, R.; Rajeevan, M.; Mapes, B.E.; Kumar, A. Improved Spread–Error Relationship and Probabilistic Prediction from the CFS-Based Grand Ensemble Prediction System. J. Appl. Meteorol. Climatol. 2015, 54, 1569–1578. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cu00u | Op71u | Op73u | Su01u | Su05u | Bn31n | Bn71n | Bn72n | Bn73n | Bn74n | Bn01u | Bn05u |
| Cu09u | On71u | On73u | Su02u | Su06u | Bp31n | Bp71n | Bp72n | Bp73n | Bp74n | Bp01u | Bp05u |
| Op31u | Op72u | Op74u | Su03u | Su07u | Bn31p | Bn71p | Bn72p | Bn73p | Bn74p | Bn02u | Bn06u |
| On31u | On72u | On74u | Su04u | Su08u | Bp31p | Bp71p | Bp72p | Bp73p | Bp74p | Bp02u | Bp06u |
| Bn03u | Bn07u | ||||||||||
| Bp03u | Bp07u | ||||||||||
| Bn04u | Bn08u | ||||||||||
| Bp04u | Bp08u |
| Parameterizations | Selection | Comments | References |
|---|---|---|---|
| cumulus (cu) | None (cu = 0) | convection solved explicitly at current resolution | [35,36] |
| microphysics (mp) | Thompson (mp = 8) | Best scheme at high resolution for this region | [37,38] |
| planetary boundary layer (pbl) | Yonsei University scheme (pbl = 1) | lower bias with respect to observations | [38,39], [40] |
| long (lw) and short (sw) wave radiation | Rapid Radiative Transfer model (RRTMG) (sw = 4, lw = 4) | represent sub-grid scale radiative processes | [41] |
| surface layer (sfc) | MM5 model revised scheme based on Monin-Obukhiv (sfc = 1) | compatible with pbl | [42,43] |
| diffusion option (diff_opt) | full diffusion (diff_opt = 2) | acurately compute horizontal gradients in sloped coordinates | [34] |
| Observations | ||
|---|---|---|
| Forecast | Yes | No |
| Yes | a (hits) | b (false alarms) |
| No | c (misses) | d (correct rejections) |
| Name | Description | Members * |
|---|---|---|
| Exp1 | Only positive members considered | Cu09ur, Su…, Op…, Bp… |
| Exp2 | Only negative members considered | Cu09ur, Su…, On…, Bn… |
| Exp3 | Only members with positive growth | Cu09ur, Su… |
| Exp4 | Members with positive growth and breeding | Cu09ur, Su…, Bp…, Bn… |
| Exp5 | Only negative growth considered | Op…, On… |
| Exp6 | Members with negative growth and breeding | Op…, On…, Bp…, Bn… |
| Exp7 | Twice the number of members with negative growth and breeding | 2*(Op…, On…, Bp…, Bn…) |
| Exp8 | Use only SKEBS and positive breeding members | Su…, Bp… |
| Exp9 | Use only SKEBS and negative breeding members | Su…, Bn… |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mayor, Y.G.; Gross, M.; Magar, V. Towards a Better Design of Convection-Allowing Ensembles for Precipitation Forecasts over Ensenada, Baja California, Mexico. Atmosphere 2020, 11, 973. https://doi.org/10.3390/atmos11090973
Mayor YG, Gross M, Magar V. Towards a Better Design of Convection-Allowing Ensembles for Precipitation Forecasts over Ensenada, Baja California, Mexico. Atmosphere. 2020; 11(9):973. https://doi.org/10.3390/atmos11090973
Chicago/Turabian StyleMayor, Yandy G., Markus Gross, and Vanesa Magar. 2020. "Towards a Better Design of Convection-Allowing Ensembles for Precipitation Forecasts over Ensenada, Baja California, Mexico" Atmosphere 11, no. 9: 973. https://doi.org/10.3390/atmos11090973
APA StyleMayor, Y. G., Gross, M., & Magar, V. (2020). Towards a Better Design of Convection-Allowing Ensembles for Precipitation Forecasts over Ensenada, Baja California, Mexico. Atmosphere, 11(9), 973. https://doi.org/10.3390/atmos11090973