Evaluation of Rainfall Forecasts by Three Mesoscale Models during the Mei-Yu Season of 2008 in Taiwan. Part III: Application of an Object-Oriented Verification Method



Abstract
:
1. Introduction
2. Data
2.1. Observational Data
2.2. Model Data
3. Object-Based Verification Method
3.1. Identification of Rainfall Objects and Their Attributes
3.2. Matching between Observed and Modeled Objects
4. Results and Discussion
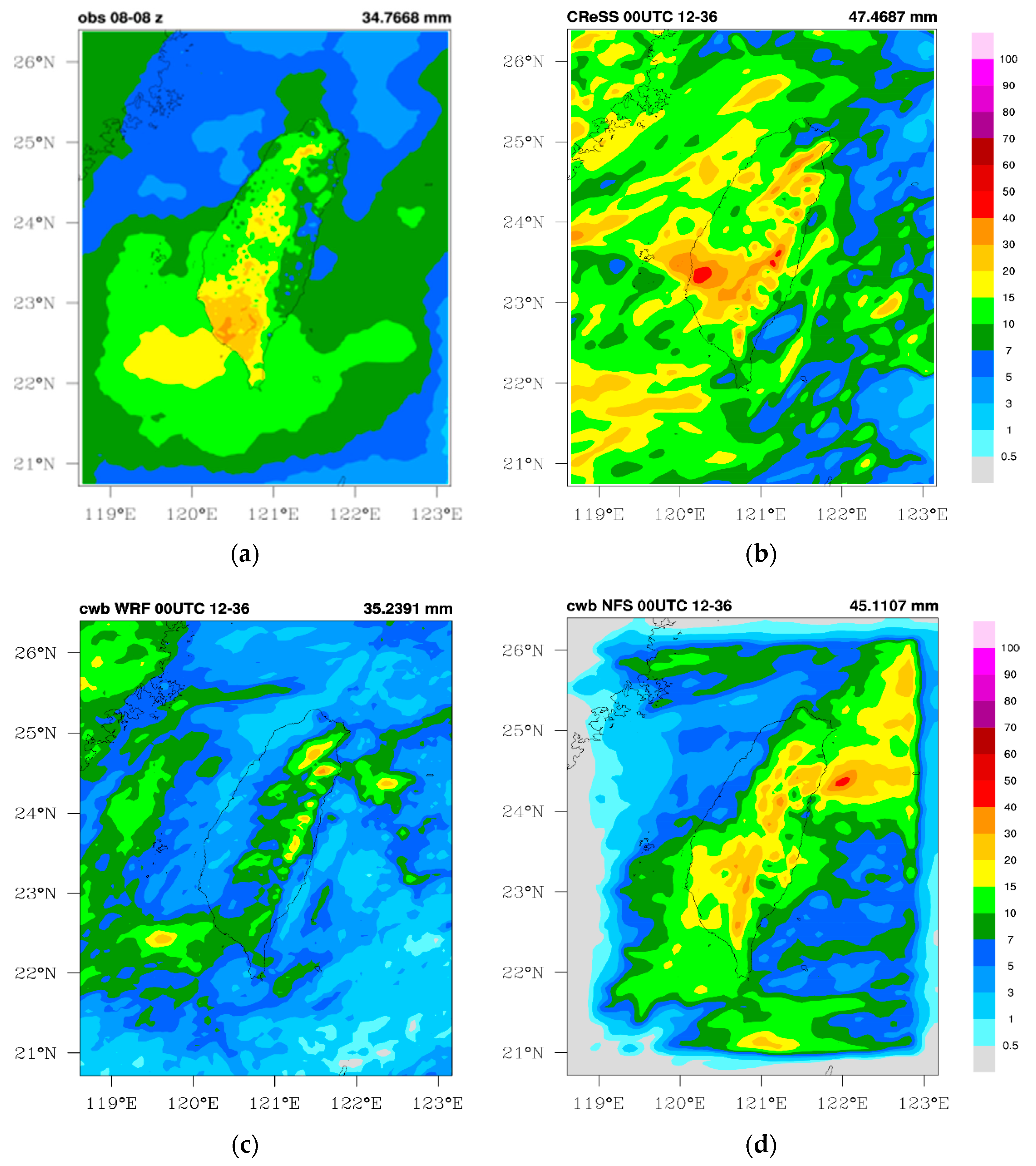
4.1. Distributions of Mean Daily Rainfall in the Season
4.2. Object-Based Analysis for Model Forecasts at 0000 UTC
4.2.1. Statistics of Major Attributes of Rainfall Objects
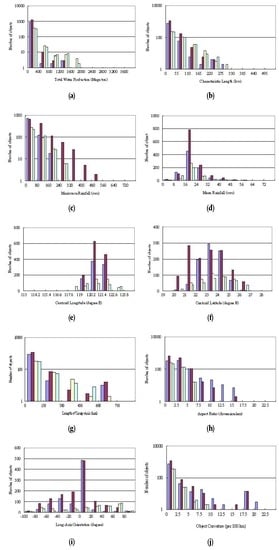
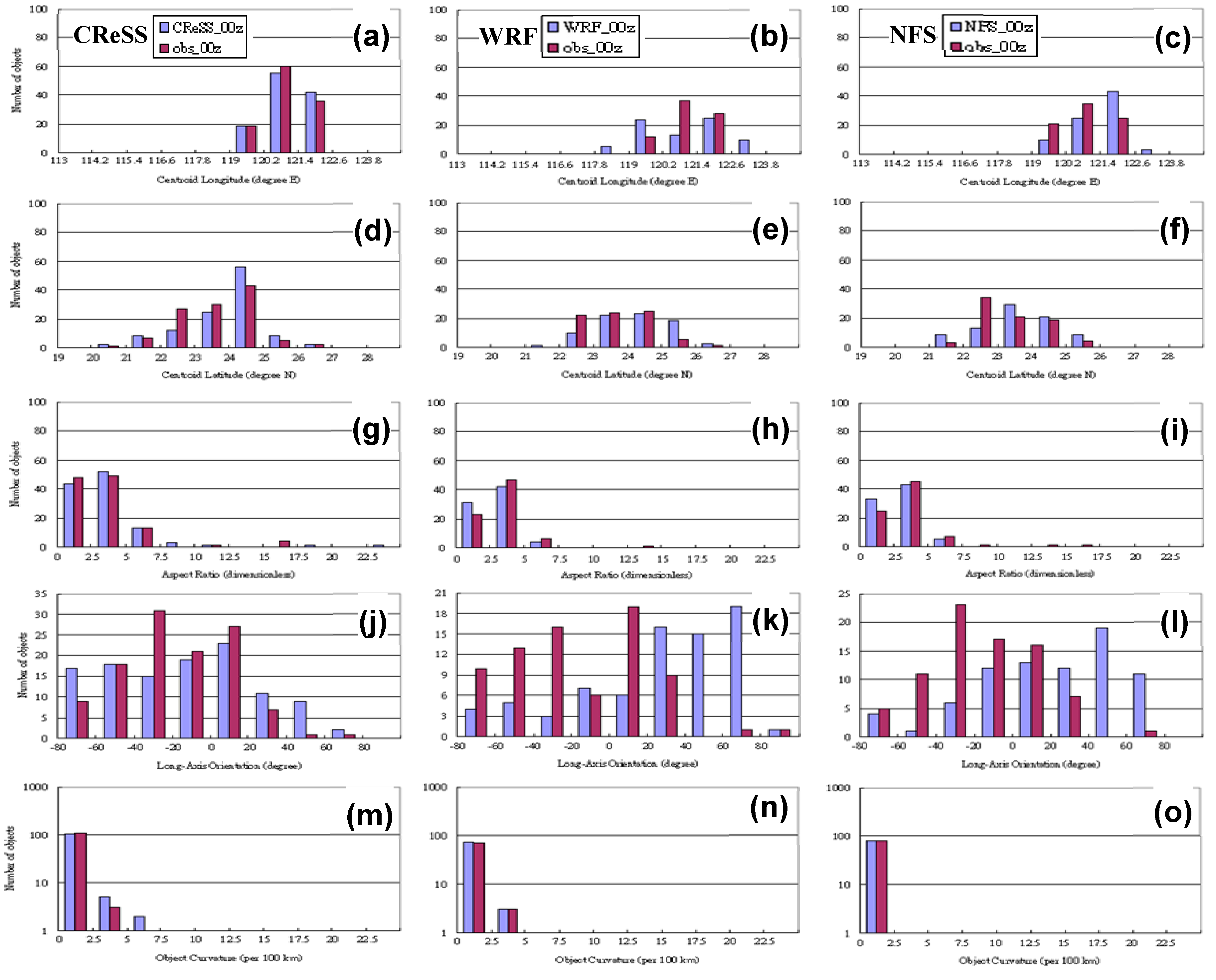
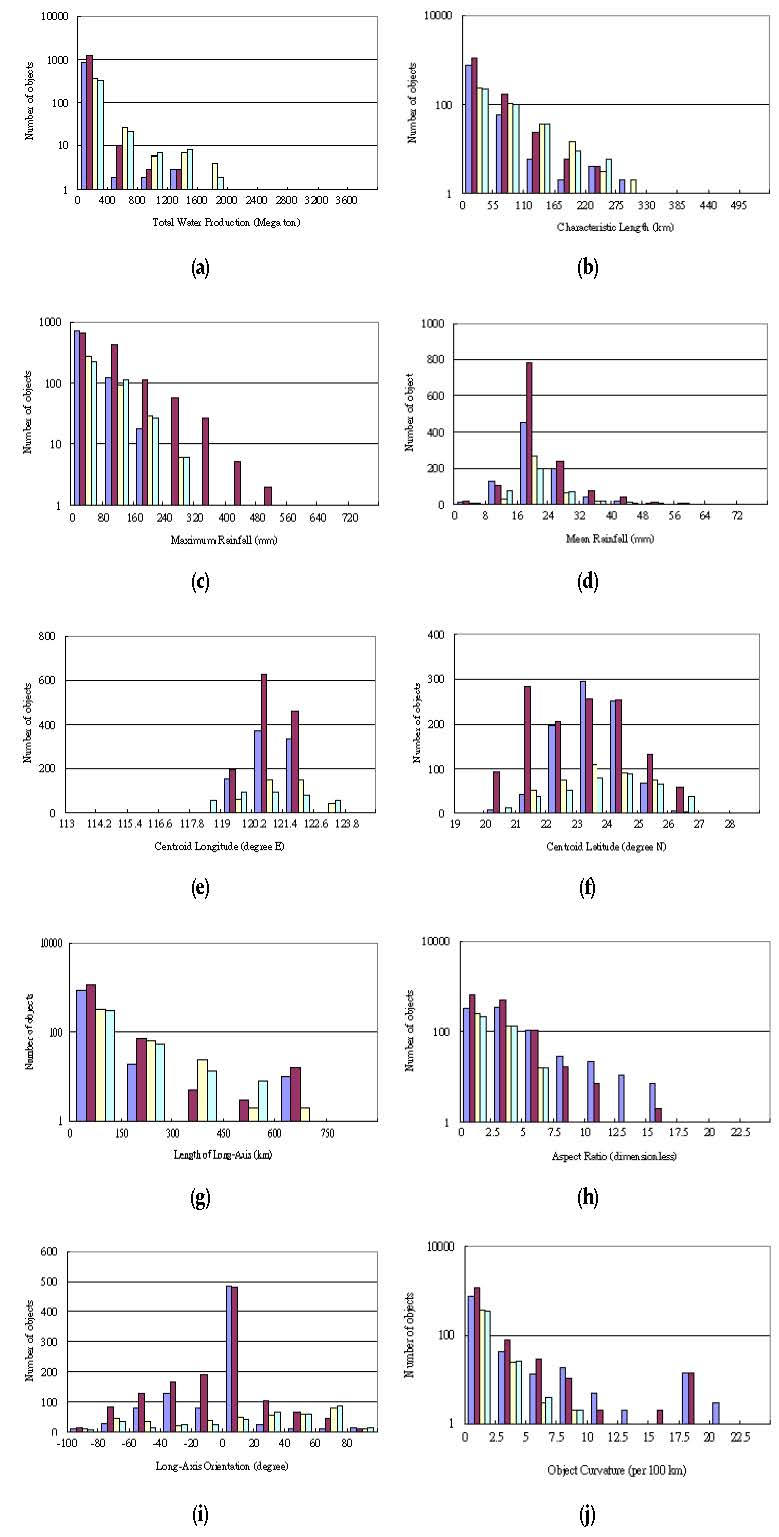
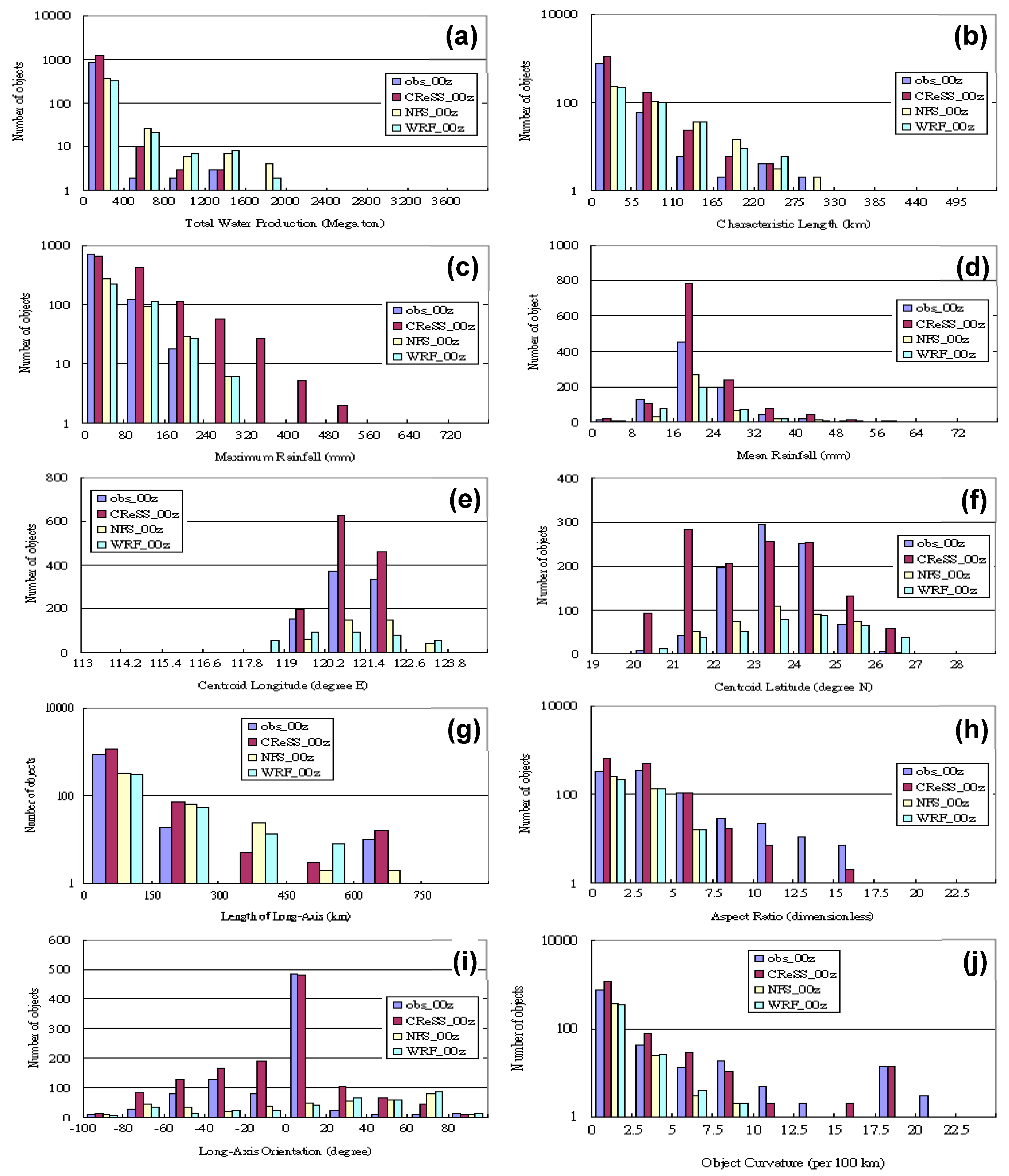
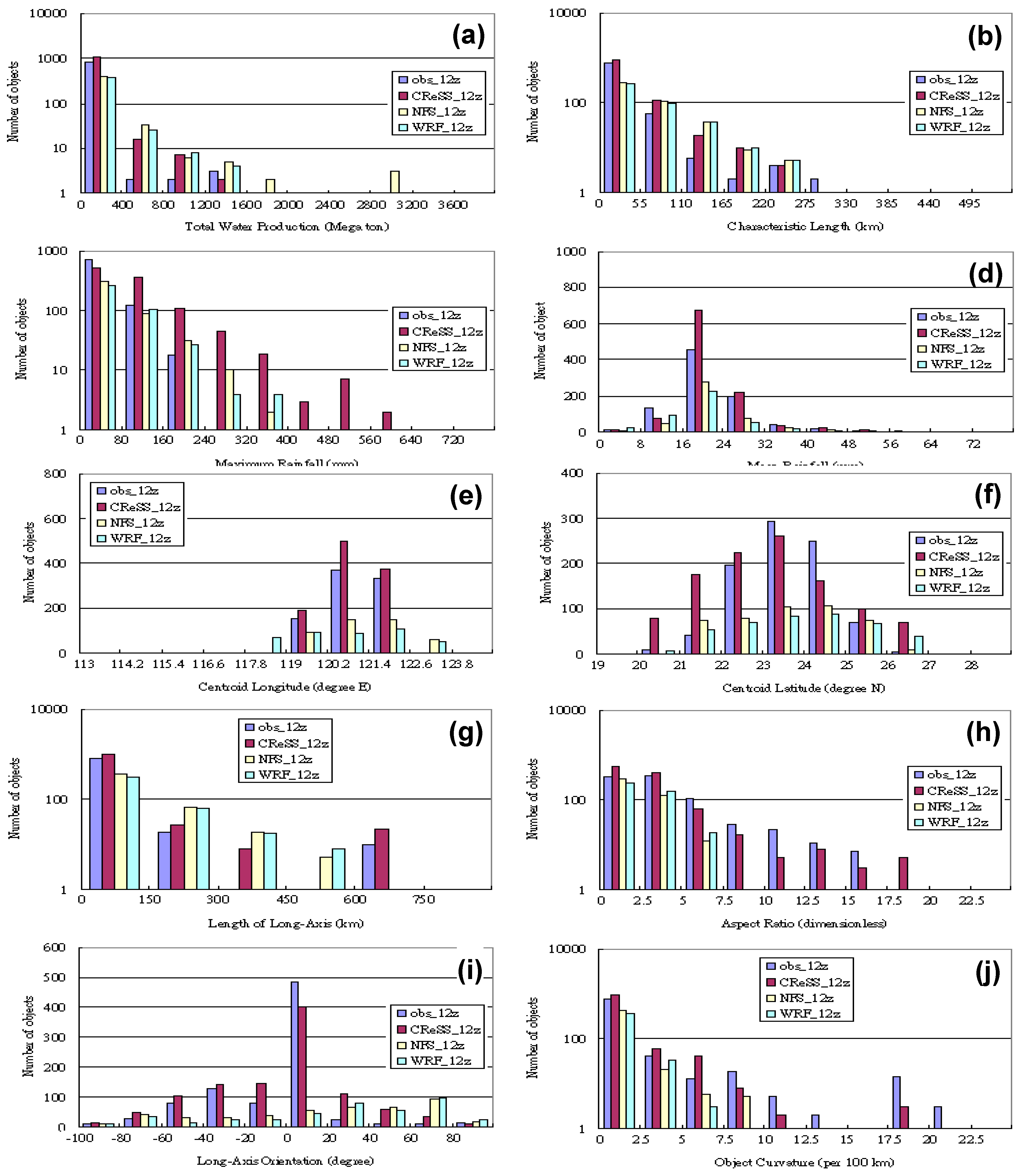
4.2.2. Distributions of Attribute Parameters of Rainfall Objects
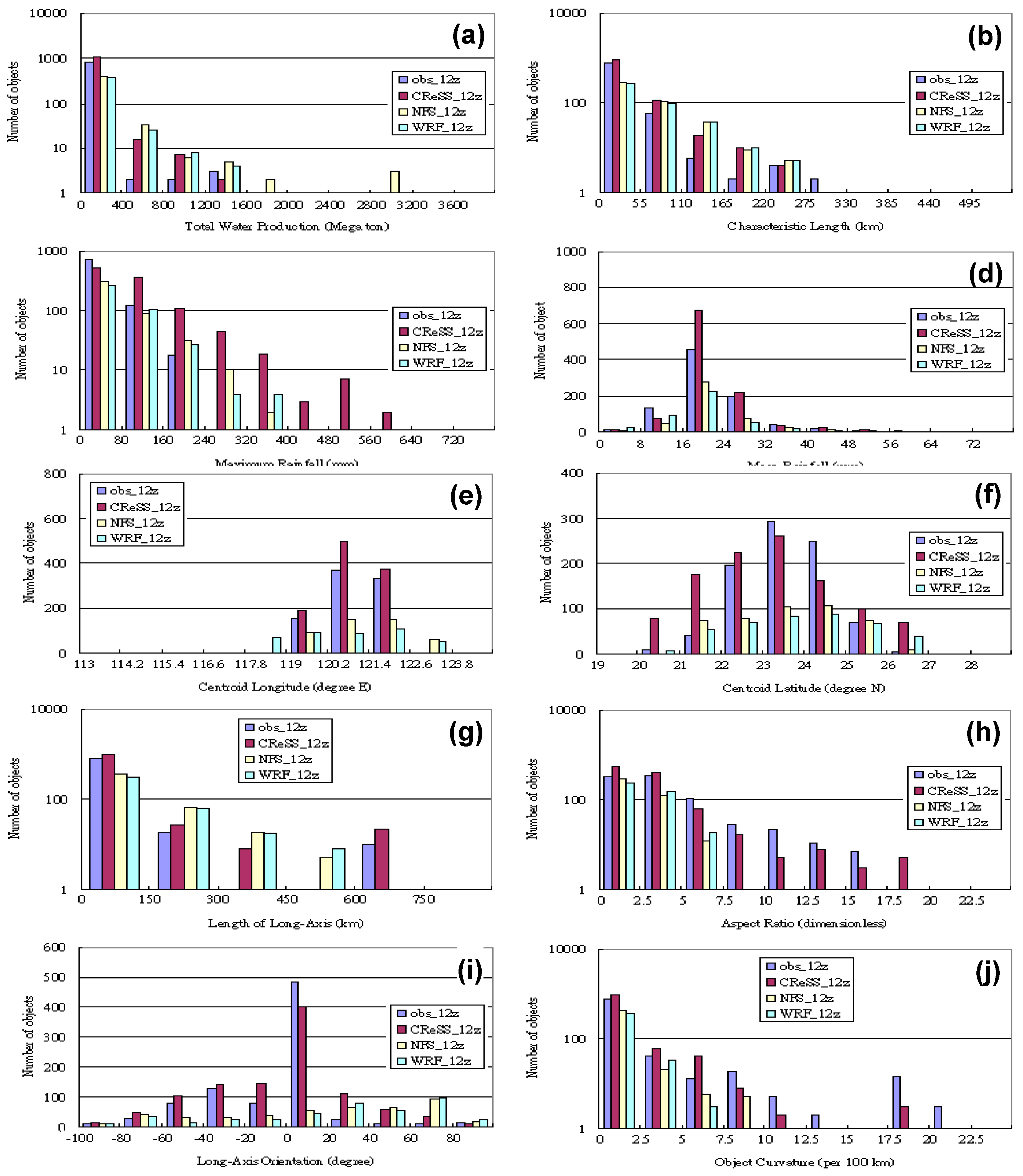
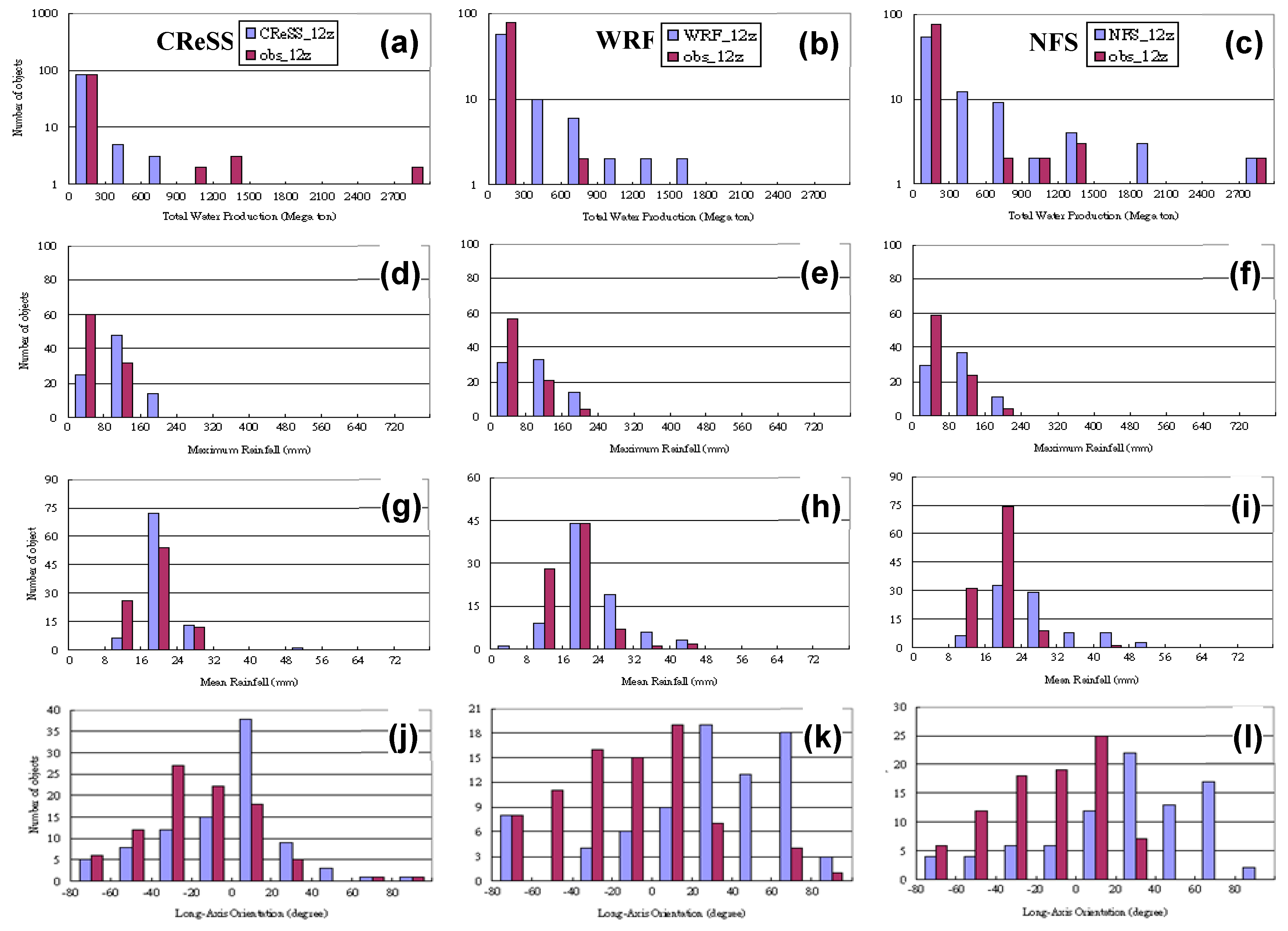
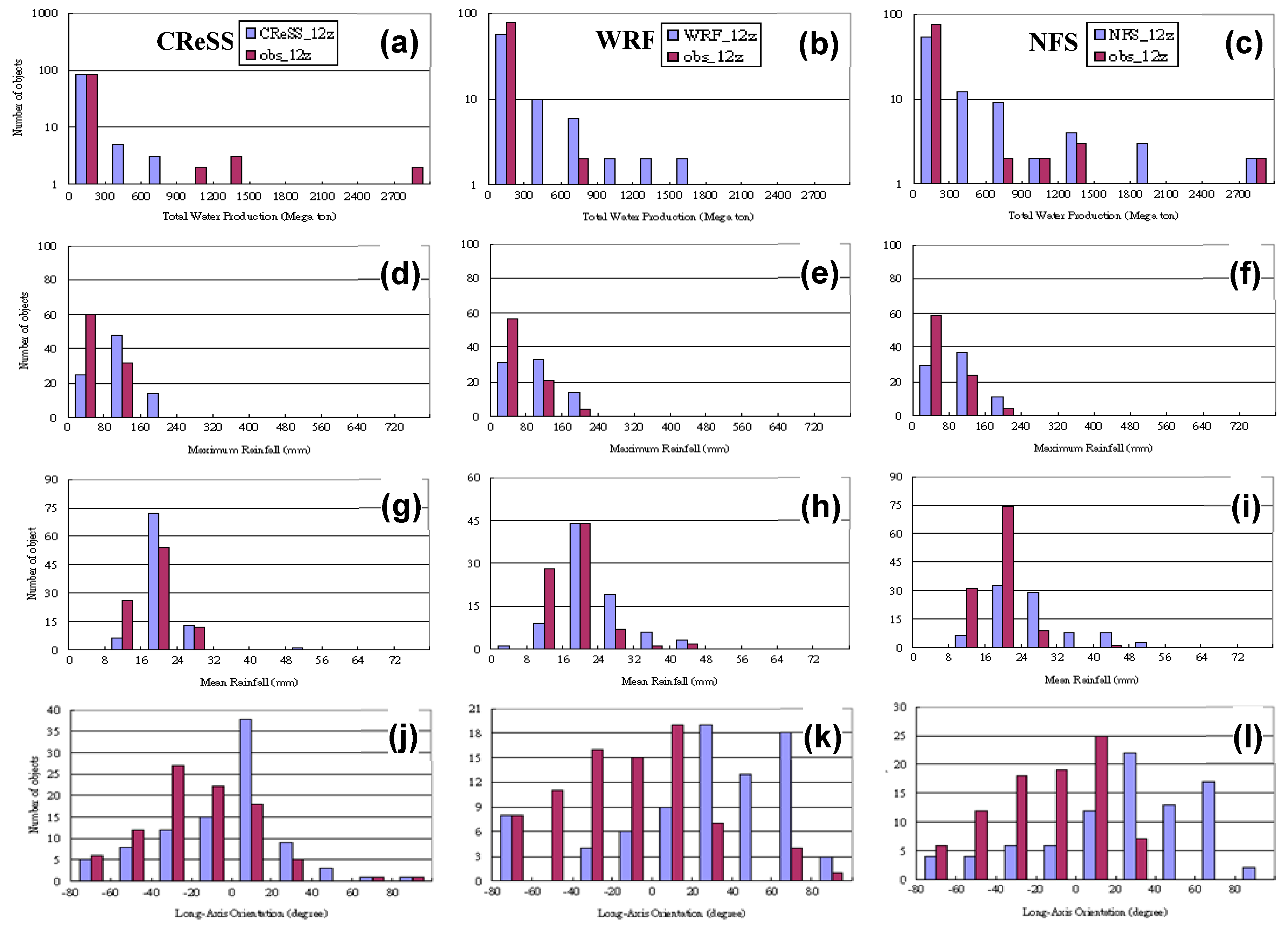
4.3. Object-Based Analysis for Model Forecasts at 1200 UTC
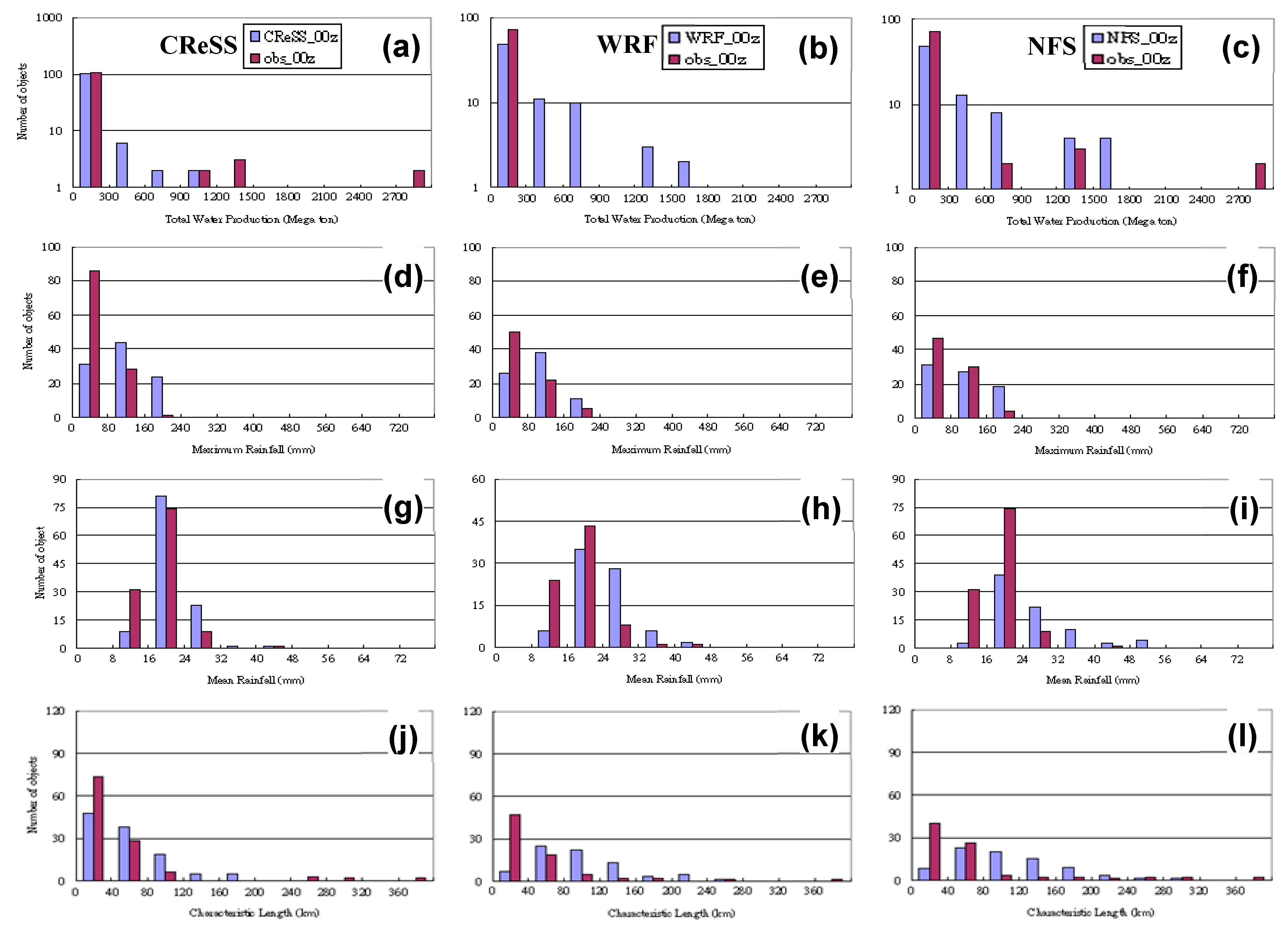
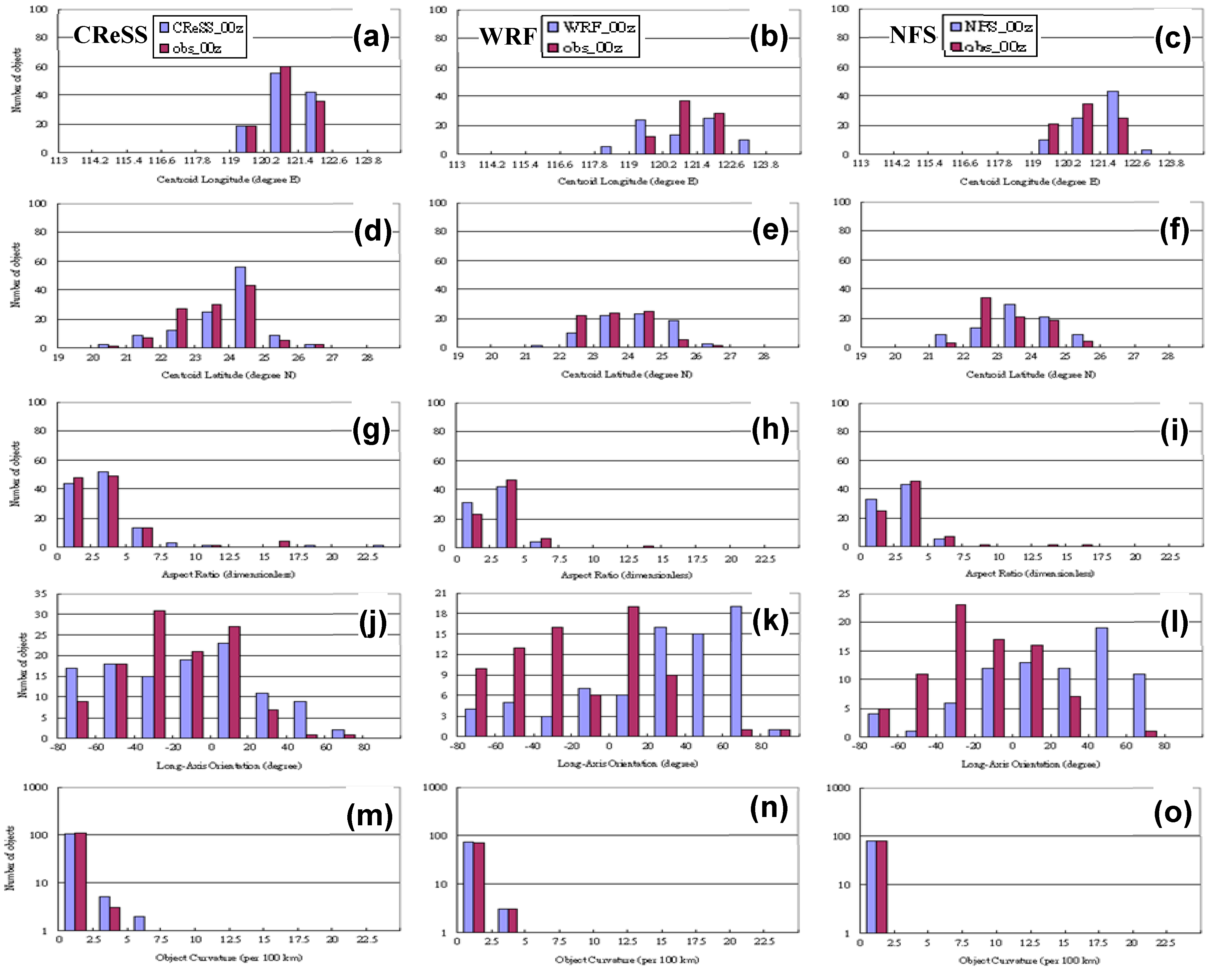
4.4. Object-Based Analysis for Matched Pairs between Observation and Forecast
5. Conclusions
- A total of 863 rainfall objects are identified for the 47-day period in observation, and CReSS produces over a thousand (about 200–400 more) while WRF and NFS have roughly 370–450 objects in the two initial times. The overall results from the mean, SD, and distributions of attribute parameters suggest that all three models show a tendency to over-forecast heavy rain and under-forecast light rain. The CReSS has about 25–50% too many objects and a strong tendency to produce small objects with more concentrated rainfall, but its total water production is the closest to the observation and the most reasonable. Both WRF and NFS, with only about one-half the total number of objects as observed, on the other hand, have a clear tendency to under forecast rainfall object number. Their objects tend to be larger in size but smaller in curvature, with less intense precipitation but high total water output compared to observation. The smaller rainfall objects in CReSS might be linked to its lack of a CPS, which would consume some instability in the environment in the parent domain in the case of WRF and NFS (in which a CPS is also turned off in the fine domain).
- In all three model simulations, their object centroids exhibit higher frequency over the terrain of Taiwan, and this response to topography is very much understandable. Nonetheless, the CReSS model exhibits a tendency to simulate the rainfall slightly too south, and NFS and WRF slightly east and north to northwest, respectively, as interpreted from the distribution of the object centroid location. The shape-related and orientation attributes suggest that CReSS simulation is very much comparable to observation, especially for orientation aspect where most objects are found to align along N–E to NW–SE direction in both CReSS and observation. On the other hand, more NE–SW aligned objects appear in WRF and NFS.
- Consistent with the design of the matching procedure between observed and modeled objects, larger objects with more water outputs are more easily matched. The over-estimation bias in size for bigger objects and under-estimation bias for smaller objects in NFS and WRF remains evident in matched pairs. A similar overestimation problem in CReSS in unmatched objects is noticeably improved in matched pairs. The total matched pairs, however, are few such that statistical significance of their attribute distributions is lowered. The reason for the low matching rate remains to be investigated and clarified in the future.
- The number of objects and the distributions of some attributes were improved in all three models in the forecasts initialized at 1200 UTC, as compared to those at 0000 UTC, particular in CReSS also in terms of centroid location and alignment of objects. This is mainly attributable to the difference in the preferred timing of rainfall in Taiwan (in local afternoon) in the 12–36 h forecast range, which is within day 1 for 1200-UTC forecasts but on the second day for 0000-UTC ones.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gartner, W.E.; Baldwin, M.E.; Junker, N.W. Regional analysis of quantitative precipitation forecast from NCEP’s “Early”Eta and meso-Eta models. In Proceedings of the 16th Conference on Weather Analysis and Forecasting, Phonenix, AZ, USA, 11–16 January 1998; pp. 187–188. [Google Scholar]
- Ebert, E.E.; McBride, J.L. Verification of precipitation in weather systems: Determination of systematic errors. J. Hydrol. 2000, 239, 179–202. [Google Scholar] [CrossRef]
- Murphy, A.H. What is a good forecast? An essay on the nature of goodness in weather forecasting. Weather Forecast. 1993, 8, 281–293. [Google Scholar] [CrossRef] [Green Version]
- Davis, C.; Brown, B.; Bullock, R. Object-based verification of precipitation forecasts. Part I: Methodology and application to mesoscale rain areas. Mon. Weather Rev. 2006, 134, 1772–1784. [Google Scholar] [CrossRef] [Green Version]
- Davis, C.; Brown, B.; Rullock, R. Object-based verification of precipitation forecasts. Part II: Application to convective rain systems. Mon. Weather Rev. 2006, 134, 1785–1795. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.C.; Paul, S.; Lee, D.I. Evaluation of rainfall forecasts by three mesoscale models during the Mei-yu season of 2008 in Taiwan. Part II: An object-oriented precipitation forecast verification method development. Atmosphere. under review.
- Paul, S.; Wang, C.C.; Tseng, L.S.; Lee, D.I. Evaluation of rainfall forecasts by three mesoscale models during the Mei-yu season of 2008 in Taiwan. Part I: Subjective comparison. Asia-Pasific J. Atmos. Sci. under review.
- Hsu, J. ARMTS up and running in Taiwan. Väisälä News 1998, 146, 24–26. [Google Scholar]
- Chen, T.C.; Yen, M.C.; Hsieh, J.C.; Arritt, R.W. Diurnal and seasonal variations of the rainfall measured by the Automatic Rainfall and Meteorological Telemetry System in Taiwan. Bull. Amer. Meteor. Soc. 1999, 80, 2299–2312. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.C.; Kuo, H.C.; Yeh, T.C.; Chung, C.H.; Chen, Y.H.; Huang, S.Y.; Wang, Y.W.; Liu, C.H. High-resolution quantitative precipitation forecasts and simulations by the Cloud-Resolving Storm Simulator (CReSS) for Typhoon Morakot (2009). J. Hydrol. 2013, 506, 26–41. [Google Scholar] [CrossRef]
- Huffman, G.J.; Adler, R.F.; Bolvin, D.T.; Gu, G.; Nelkin, E.J.; Bowman, K.P.; Hong, Y.; Stocker, E.F.; Wolff, D.B. The TRMM Multisatellite Precipitation Analysis (TMPA): Quasi-global, multiyear, combined-Sensor precipitation estimates at fine scales. J. Hydrometeorl. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Cressman, G.P. An operational objective analysis system. Mon. Weather Rev. 1959, 87, 367–374. [Google Scholar] [CrossRef]
- Jou, B.J.D.; Lee, W.C.; Johnson, R.H. An overview of SoWMEX/TiMREX. In The Global Monsoon System: Research and Forecasts, 2nd ed.; Chang, C.-P., Ed.; World Scientific: Singapore, 2011; pp. 303–318. [Google Scholar]
- Tsuboki, K.; Sakakibara, A. Large-scale parallel computing of cloud resolving storm simulator. In High Performance Computing; Zima, H.P., Ed.; Springer: Berlin/Heidelberg, Germany, 2002; pp. 243–259. [Google Scholar]
- Tsuboki, K.; Sakakibara, A. Numerical Prediction of High-Impact Weather Systems. In The Textbook for Seventeenth IHP Training Course; HyARC; Nagoya University; UNESCO: Nagoya, Japan, 2007; 273p. [Google Scholar]
- Zhao, Q.; Black, T.L.; Baldwin, M.E. Implementation of the cloud prediction scheme in the Eta model at NCEP. Weather Forecast. 1997, 12, 697–713. [Google Scholar] [CrossRef]
- Detering, H.W.; Etling, D. Application of the Eε turbulence model to the atmosphere boundary layer. Bound. Layer Meteorol. 1985, 33, 113–133. [Google Scholar] [CrossRef]
- Segami, A.; Kurihara, K.; Nakamura, H.; Ueno, M.; Takano, I.; Tatsumi, Y. Operational mesoscale weather prediction with Japan Spectral Model. J. Meteorol. Soc. Jpn. 1989, 64, 637–664. [Google Scholar]
- Davies, R.; Randall, D.A.; Corsetti, T.G. A fast radiative parameterization for atmospheric circulation models. J. Geophys. Res. 1987, 92, 1009–1016. [Google Scholar]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Wang, W.; Powers, J.G. A description of the Advanced Research WRF version 2. In NCAR Technical Note TN-468+STR; University Corporation for Atmospheric Research: Boulder, CO, USA, 2005; 100p. [Google Scholar]
- Hong, J.S. The evaluation of typhoon track and quantitative precipitation forecasts of CWB’s NFS in 2001. Meteor. Bull. 2002, 44, 41–53. [Google Scholar]
- Wang, C.C.; Huang, H.L.; Li, J.L.; Leou, T.M.; Chen, G.T.J. An evaluation on the performance of the CWB NFS model in the prediction of warm-season rainfall distribution and propagation over the East Asian continent. Terr. Atmos. Ocean. Sci. 2011, 22, 49–69. (In Chinese) [Google Scholar] [CrossRef] [Green Version]
- Ritter, G.X.; Wilson, J.N. Computer Vision Algorithms in Image Algebra; CRC Press: Boca Raton, FL, USA, 2001; 417p. [Google Scholar]
- Ruppert, J.H., Jr.; Johnson, R.H.; Rowe, A.K. Diurnal circulations and rainfall in Taiwan during SoWMEX/TiMREX (2008). Mon. Weather Rev. 2013, 141, 3851–3872. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.C.; Hsu, J.C.S.; Chen, G.T.J.; Lee, D.I. A study of two propagating heavy-rainfall episodes near Taiwan during SoWMEX/TiMREX IOP-8 in June 2008. Part II: Sensitivity tests on the roles of synoptic conditions and topographic effects. Mon. Weather Rev. 2014, 142, 2644–2664. [Google Scholar] [CrossRef]
- Wang, C.C.; Chien, F.C.; Paul, S.; Lee, D.I.; Chuang, P.Y. An evaluation of WRF rainfall forecasts in Taiwan during three mei-yu seasons of 2008–2010. Weather Forecast. 2017, 32, 1329–1351. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | CReSS | CWB WRF | CWB NFS |
|---|---|---|---|
| Grid size | 3.5 km | 5 km (domain 3) | 5 km (domain 3) |
| Grid dimension (x, y, z) | 330 × 280 × 40 | 140 ×178 × 45 | 91 × 121 × 30 |
| Fine domain region | 113.5°–124.5° N, 19°–28° N | 117°–125° N, 20°–28.5° N | 118.7°–123.3° N, 20.8°–26.4° N |
| Cloud microphysics | Bulk cold-rain (six species) | NASA Goddard | Simple ice [16] |
| Cumulus parameterization | None | None | None |
| PBL parameterization | 1.5-order closure with TKE prediction | Yonsei University | [17] |
| Radiation parameterization | [18] | RRTM and Goddard | [19] |
| Parameter | Observation | CReSS | CWB WRF | CWB NFS |
|---|---|---|---|---|
| Mean (SD) | Mean (SD) | Mean (SD) | Mean (SD) | |
| Total object number | 863 | 1287 | 371 | 401 |
| Water production (106 ton) | 29.3 (166.9) | 44.2 (120.1) | 149.6 (285.6) | 170.1 (379.3) |
| Area size (km2) | 1692.8 (9432.9) | 2071.1 (5529.9) | 5674.9 (9584.4) | 5871.4 (10,056.6) |
| Mean rainfall (mm) | 21.9 (8.2) | 22.7 (7.9) | 20.7 (7.0) | 21.7 (7.2) |
| Maximum rainfall (mm) | 48.5 (36.9) | 99.6 (77.2) | 80.7 (63.6) | 74.5 (56.3) |
| 90-percentile rainfall (mm) | 37.1 (18.1) | 58.5 (24.3) | 45.4 (22.1) | 45.6 (21.2) |
| 75-percentile rainfall (mm) | 29.9 (11.4) | 34.5 (11.6) | 29.4 (10.2) | 30.6 (10.5) |
| 50-percentile rainfall (mm) | 20.1 (13.5) | 13.4 (15.3) | 16.6 (5.3) | 18.0 (4.9) |
| Centroid longitude (° E) | 121.05 (0.79) | 120.95 (2.47) | 120.61 (3.40) | 121.25 (0.98) |
| Centroid latitude (° N) | 23.66 (1.06) | 23.23 (1.57) | 23.94 (1.54) | 23.67 (1.32) |
| Long-axis orientation (°) | −9.4 (27.0) | −6.6 (34.0) | 21.8 (48.2) | 12.6 (49.8) |
| Long-axis length (km) | 42.8 (74.2) | 64.8 (85.3) | 104.9 (98.4) | 105.6 (100.6) |
| Short-axis length (km) | 13.7 (24.3) | 21.0 (44.8) | 37.4 (26.0) | 38.3 (26.5) |
| Aspect ratio | 3.6 (2.7) | 3.0 (1.9) | 2.6 (1.1) | 2.5 (1.1) |
| Curvature (10−2) | 1.36 (3.93) | 1.07 (2.61) | 0.81 (1.40) | 0.69 (1.21) |
| Parameter | Observation | CReSS | CWB WRF | CWB NFS |
|---|---|---|---|---|
| Mean (SD) | Mean (SD) | Mean (SD) | Mean (SD) | |
| Total object number | 863 | 1067 | 408 | 448 |
| Water production (106 ton) | 29.3 (166.9) | 48.9 (142.1) | 158.5 (387.4) | 155.6 (354.6) |
| Area size (km2) | 1692.8 (9432.9) | 2146.8 (5956.7) | 5966.4 (11,945.4) | 5258.6 (9711.8) |
| Mean rainfall (mm) | 21.9 (8.2) | 22.3 (7.7) | 19.2 (7.0) | 22.0 (7.9) |
| Maximum rainfall (mm) | 48.5 (36.9) | 105.1 (85.5) | 74.9 (58.8) | 75.4 (62.1) |
| 90-percentile rainfall (mm) | 37.1 (18.1) | 62.8 (27.1) | 41.5 (20.2) | 45.9 (23.7) |
| 75-percentile rainfall (mm) | 29.9 (11.4) | 35.0 (12.5) | 27.0 (10.0) | 30.6 (11.4) |
| 50-percentile rainfall (mm) | 20.1 (13.5) | 11.1 (14.4) | 15.8 (5.0) | 18.1 (5.3) |
| Centroid longitude (° E) | 121.05 (0.79) | 120.92 (1.98) | 120.76 (1.42) | 121.26 (1.05) |
| Centroid latitude (° N) | 23.66 (1.06) | 23.28 (1.53) | 23.85 (1.53) | 23.63 (1.38) |
| Long-axis orientation (°) | −9.4 (27.0) | −4.4 (33.9) | 23.1 (48.4) | 17.2 (48.8) |
| Long-axis length (km) | 42.8 (74.2) | 65.1 (94.4) | 104.4 (105.2) | 94.9 (94.0) |
| Short-axis length (km) | 13.7 (24.3) | 20.0 (16.5) | 35.7 (28.0) | 36.1 (26.9) |
| Aspect ratio | 3.6 (2.7) | 3.1 (2.2) | 2.7 (1.1) | 2.4 (1.0) |
| Curvature (10−2) | 1.36 (3.93) | 1.00 (1.99) | 0.77 (1.12) | 0.80 (1.44) |
| Parameter | Observation | CReSS | CWB WRF | CWB NFS |
|---|---|---|---|---|
| Initial time (UTC) | 0000 (1200) | 0000 (1200) | 0000 (1200) | 0000 (1200) |
| Total object number | 115 (92) | 115 (92) | 77 (82) | 81 (87) |
| Water production (106 ton) | 127.7 (152.9) | 113.8 (92.7) | 365.1 (393.3) | 484.3 (452.5) |
| Area size (km2) | 7447.9 (8921.9) | 5279.4 (4413.7) | 13,709.1 (13,664.3) | 14,971.6 (13,642.8) |
| Mean rainfall (mm) | 18.7 (18.5) | 21.2 (20.9) | 23.9 (23.0) | 26.4 (26.9) |
| Maximum rainfall (mm) | 68.3 (69.2) | 139.1 (124.4) | 111.7 (112.3) | 119.2 (123.4) |
| 90-percentile rainfall (mm) | 44.8 (43.4) | 63.4 (68.6) | 51.9 (49.8) | 57.4 (60.3) |
| 75-percentile rainfall (mm) | 31.9 (30.3) | 35.0 (36.8) | 32.8 (31.5) | 36.2 (37.1) |
| 50-percentile rainfall (mm) | 11.0 (12.5) | 5.9 (5.1) | 18.4 (17.9) | 20.0 (19.7) |
| Centroid longitude (° E) | 120.97 (120.87) | 121.04 (120.98) | 120.88 (120.62) | 121.39 (121.34) |
| Centroid latitude (° N) | 23.70 (23.66) | 23.91 (23.87) | 24.21 (23.92) | 23.63 (23.55) |
| Long-axis orientation (°) | −19.4 (−19.0) | −16.0 (−3.2) | 25.0 (22.1) | 17.0 (22.5) |
| Long-axis length (km) | 100.0 (106.3) | 134.7 (121.4) | 187.1 (172.6) | 194.5 (178.4) |
| Short-axis length (km) | 30.5 (36.8) | 34.8 (27.6) | 62.3 (57.3) | 64.6 (60.3) |
| Aspect ratio | 3.6 (3.1) | 3.7 (3.9) | 3.0 (2.9) | 2.9 (2.8) |
| Curvature (10−2) | 0.61 (0.73) | 0.60 (0.74) | 0.41 (0.41) | 0.27 (0.33) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.-C.; Paul, S.; Lee, D.-I. Evaluation of Rainfall Forecasts by Three Mesoscale Models during the Mei-Yu Season of 2008 in Taiwan. Part III: Application of an Object-Oriented Verification Method. Atmosphere 2020, 11, 705. https://doi.org/10.3390/atmos11070705
Wang C-C, Paul S, Lee D-I. Evaluation of Rainfall Forecasts by Three Mesoscale Models during the Mei-Yu Season of 2008 in Taiwan. Part III: Application of an Object-Oriented Verification Method. Atmosphere. 2020; 11(7):705. https://doi.org/10.3390/atmos11070705
Chicago/Turabian StyleWang, Chung-Chieh, Sahana Paul, and Dong-In Lee. 2020. "Evaluation of Rainfall Forecasts by Three Mesoscale Models during the Mei-Yu Season of 2008 in Taiwan. Part III: Application of an Object-Oriented Verification Method" Atmosphere 11, no. 7: 705. https://doi.org/10.3390/atmos11070705
APA StyleWang, C.-C., Paul, S., & Lee, D.-I. (2020). Evaluation of Rainfall Forecasts by Three Mesoscale Models during the Mei-Yu Season of 2008 in Taiwan. Part III: Application of an Object-Oriented Verification Method. Atmosphere, 11(7), 705. https://doi.org/10.3390/atmos11070705