Fog Classification by Their Droplet Size Distributions: Application to the Characterization of Cerema’s Platform




Abstract
1. Introduction
- to characterize the two types of fogs of the platform. The objective is to show that these fogs are significantly different, over a large amount of data.
- to show that these two types of fog DSDs are similar to natural fogs.
2. Cerema’s Platform
2.1. Presentation of the Platform
2.2. An Example of Platform Use Cases
2.3. Mechanical fog Production System and Limitation of This Study
3. Methods
3.1. Choice of Parameters
3.2. Methodology
- small droplets fog (SD fog), with a main diameter mode around 0.5–1 m, produced with normal tap water.
- medium droplets fog (MD fog), with two diameter modes around 0.5–1 m and 7–10 m, produced with demineralized water.
- fog type (SD or MD),
- MOR (temporal resolution of one second),
- DSD (temporal resolution of one second).
- A study of the correlation between the parameters was made.
- This resulted in a restriction of the parameters analyzed. It is important to limit redundancy in the parameters used as much as possible.
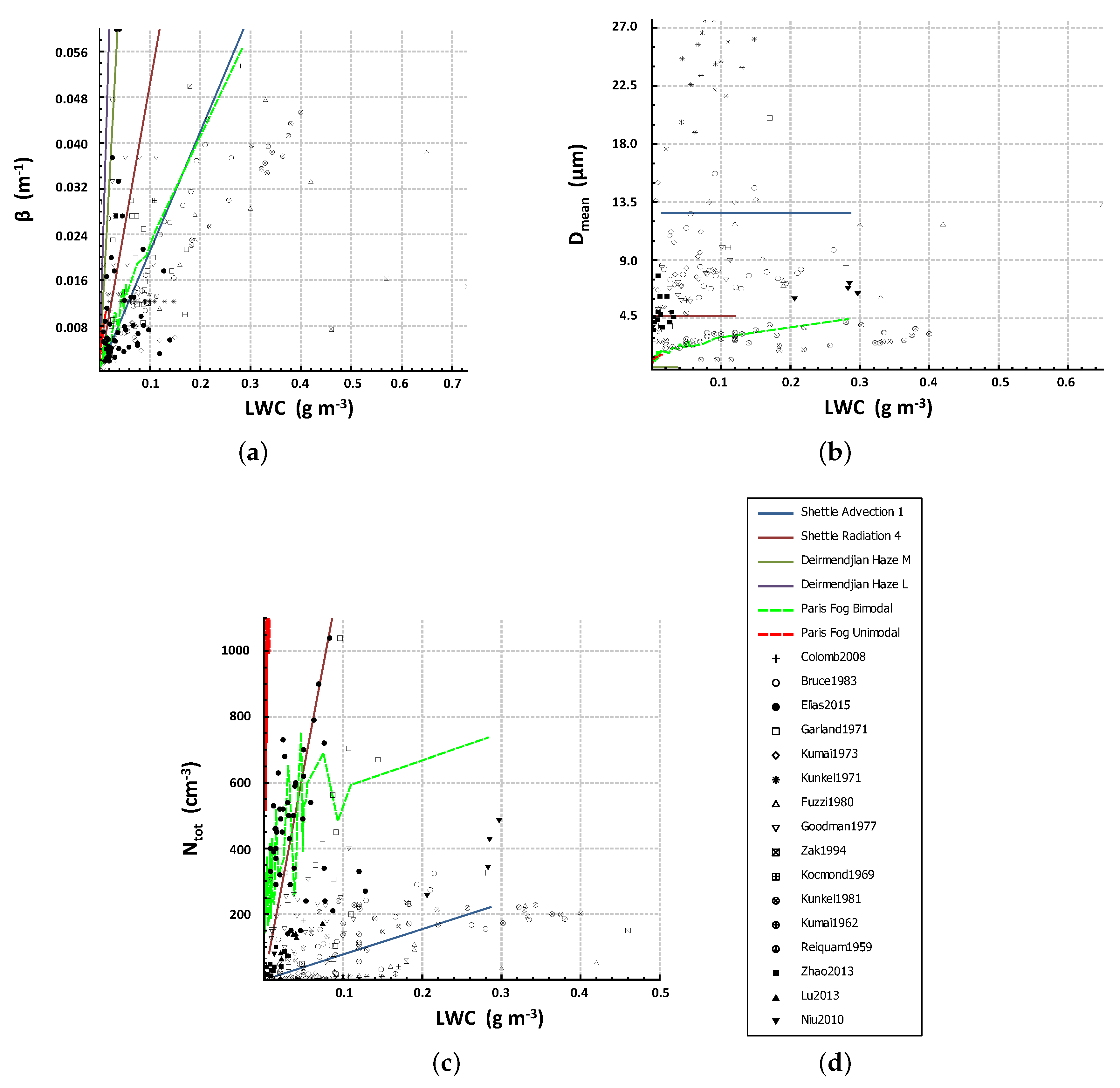
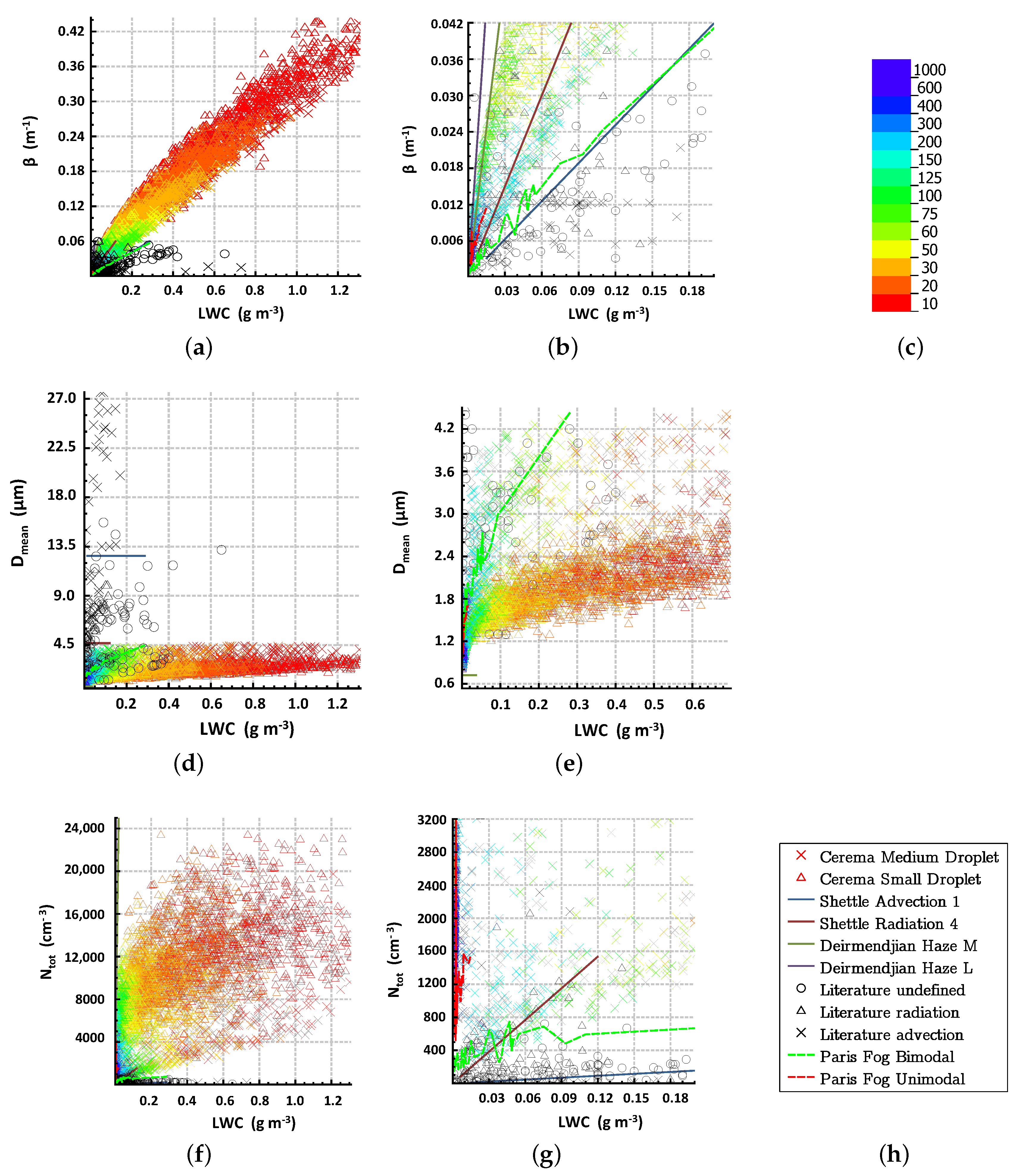
- Once the parameters are limited in number, a qualitative and descriptive analysis was proposed. It is based on a graphical comparison by pairs of parameters. Whenever possible, data from the literature were added to the data from the platform. Data from natural fogs were also added in order to measure the correspondence between the fogs produced within the platform and natural fogs.
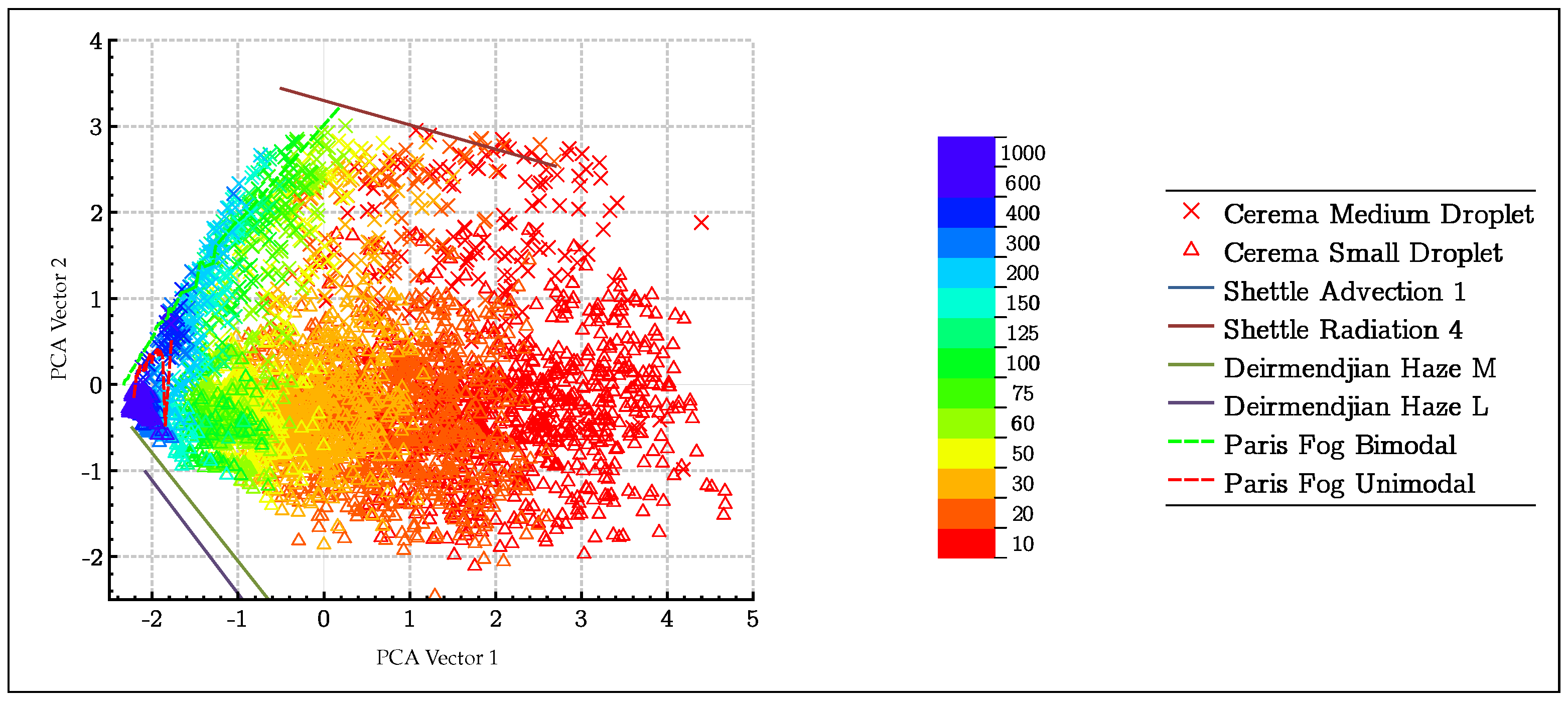
- In order to be able to compare the parameters against each other, a principal component analysis (PCA) will be performed. This will provide the most relevant combinations of parameters to sort the two types of fogs produced in the platform. This will also make it possible to verify how a type of parameter classifies the two types of fogs produced within the platform.
- The two descriptive and qualitative analyses are followed by a quantitative analysis based on a metric. The latter consists of calculating a coefficient, known hereafter as a Fog Classification Coefficient (FCC). This coefficient is calculated along the lines of the first round of the K-mean method. The K-mean method is an unsupervised classification method. It involves classifying a set of data into N groups, without labelled data for learning. The FCC is calculated in the following way for a given pair of parameters (Figure 5):
- –
- The input data for the calculation of the FCC are the coordinates according to two chosen parameters, calculated on each of the DSDs in the database. In Figure 5a, the two types of fogs (crosses and circles) are drawn along two axes corresponding to two parameters and each point corresponds to one DSD in the database.
- –
- –
- The second step consists of calculating the distance to the centre of each group for each data point. The two distances obtained (distances to the centre of the group of MD and SD fogs) are compared for each data point. The data point is then assigned to the group with the smaller distance (Figure 5c). In Figure 5c, each group is on either side of the black line.
- –
- Finally, once all data points are assigned to one of the two groups, the number of well-classified points is calculated (Figure 5d). The FCC is the rate of well-classified data points. In Figure 5d, well-classified points are green and wrongly classified points are red. It should be noted that for the calculation of the FCC, here we use a supervised method (with known label), although the original K-mean is unsupervised.
- One FCC is then obtained per pair of parameters, or by pairs of PCA vectors. The FCCs vary between 0 and 1, and the closer the value is to 1, the more effectively the pair of parameters taken into account allows for efficient separation of the two fog types (MD and SD). This classification coefficient has many advantages. This metric is in fact not dependent on units, nor on orders of magnitude (one parameter can vary between and 10 while another can vary between 0 and ). It, therefore, allows an impartial and quantified comparison of the very varied and heterogeneous fog DSD parameters proposed in this article.
4. Results
4.1. Choice of Parameters by Correlation
4.2. Descriptive Analysis
4.3. Statistical Analysis
- Overall, on all the data.
- By sorting the data by MOR packet (this presupposes having the external reference MOR data, given here by the transmissometer).
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ADAS | Advance driving assistance systems |
| DSD | Droplet size distribution |
| FCC | Fog Classification Coefficient |
| LiDAR | Light Detection And Ranging |
| LWC | Liquid water content |
| MD | Medium Droplets |
| MOR | Meteorological optical range |
| PCA | Principal Component Analysis |
| PSA | Particle Size Analyser |
| SD | Small Droplets |
| ToF | Time of Flight |
References
- Gultepe, I.; Tardif, R.; Michaelides, S.C.; Cermak, J.; Bott, A.; Bendix, J.; Müller, M.D.; Pagowski, M.; Hansen, B.; Ellrod, G.; et al. Fog research: A review of past achievements and future perspectives. Pure Appl. Geophys. 2007, 164, 1121–1159. [Google Scholar] [CrossRef]
- Duchamp, G.; Sibel, R.M.; Colomb, M.; Tomatis, A.; Hobert, L.; Mahler, T.; Ritter, W.; Kutila, M.; Manninen, A.; Laukkanen, S.; et al. DENSE D2.2 System Needs and Benchmarking; Technical Report; DENSE H2020 Project; Daimler AG: Ulm, Germany, 2017. [Google Scholar]
- World Meteorological Organization. Guide to Meteorological Instruments and Methods of Observation; 2014 edition updated in 2017; WMO-No. 8; World Meteorological Organization: Geneva, Switzerland, 2014; p. 1163. [Google Scholar]
- Duthon, P.; Colomb, M.; Bernardin, F. Light Transmission in Fog: The Influence of Wavelength on the Extinction Coefficient. Appl. Sci. 2019, 9, 2843. [Google Scholar] [CrossRef]
- Haeffelin, M.; Bergot, T.; Elias, T.; Tardif, R.; Carrer, D.; Chazette, P.; Colomb, M.; Drobinski, P.; Dupont, E.; Dupont, J.C.; et al. PARISFOG: Shedding new light on fog physical processes. Bull. Am. Meteorol. Soc. 2010, 91, 767–783. [Google Scholar] [CrossRef]
- Elias, T.; Dupont, J.C.; Hammer, E.; Hoyle, C.R.; Haeffelin, M.; Burnet, F.; Jolivet, D. Enhanced extinction of visible radiation due to hydrated aerosols in mist and fog. Atmos. Chem. Phys. 2015, 15, 6605–6623. [Google Scholar] [CrossRef]
- Colomb, M.; Bernardin, F.; Morange, P. Paramétrisation de la visibilité et modelisation de la distribution granulométrique à partir de données microphysiques. In Proceedings of the Séminaire AMA 2008 Météo France, Toulouse, France, 22–24 January 2008; pp. 1–10. [Google Scholar]
- Colomb, M.; Duthon, P.; Laukkanen, S. Deliverable D 2.1: Characteristics of Adverse Weather Conditions; Technical Report; DENSE H2020 Project; Daimler AG: Ulm, Germany, 2017. [Google Scholar]
- Colomb, M.; Hirech, K.; André, P.; Boreux, J.; Lacôte, P.; Dufour, J. An innovative artificial fog production device improved in the European project “FOG”. Atmos. Res. 2008, 87, 242–251. [Google Scholar] [CrossRef]
- Cavallo, V.; Colomb, M.; Doré, J. Distance Perception of Vehicle Rear Lights in Fog. Hum. Factors 2001, 43, 442–451. [Google Scholar] [CrossRef]
- Quétard, B.; Quinton, J.C.; Colomb, M.; Pezzulo, G.; Barca, L.; Izaute, M.; Appadoo, O.K.; Mermillod, M. Combined effects of expectations and visual uncertainty upon detection and identification of a target in the fog. Cogn. Process. 2015, 16, 343–348. [Google Scholar] [CrossRef]
- Bernardin, F.; Bremond, R.; Ledoux, V.; Pinto, M.; Lemonnier, S.; Cavallo, V.; Colomb, M. Measuring the effect of the rainfall on the windshield in terms of visual performance. Accid. Anal. Prev. 2014, 63, 83–88. [Google Scholar] [CrossRef]
- Marchetti, M.; Boucher, V.; Dumoulin, J.; Colomb, M. Retrieving visibility distance in fog combining infrared thermography, Principal Components Analysis and Partial Least-Square regression. Infrared Phys. Technol. 2015, 71, 289–297. [Google Scholar] [CrossRef]
- Pinchon, N.; Cassignol, O.; Nicolas, A.; Leduc, P.; Tarel, J.P.; Bremond, R.; Julien, G.; Pinchon, N.; Cassignol, O.; Nicolas, A.; et al. All-weather vision for automotive safety: Which spectral band? In Proceedings of the SIA Vision 2016—International Conference Night Drive Tests and Exhibition, Paris, France, 13–14 October 2016. [Google Scholar]
- Dahmane, K.; Duthon, P.; Bernardin, F.; Colomb, M.; Essoukri Ben Amara, N.; Chausse, F. The Cerema pedestrian database: A specific database in adverse weather conditions to evaluate computer vision pedestrian detectors. In Proceedings of the 7th Conference on Sciences of Electronics, Technologies of Information and Telecommunications (SETIT), Hammamet, Tunisia, 18–20 December 2016; pp. 480–485. [Google Scholar]
- Bijelic, M.; Mannan, F.; Gruber, T.; Ritter, W.; Dietmayer, K.; Heide, F. Seeing Through Fog Without Seeing Fog: Deep Sensor Fusion in the Absence of Labeled Training Data. arXiv 2019, arXiv:1902.08913. [Google Scholar]
- Bijelic, M.; Kysela, P.; Gruber, T.; Ritter, W.; Dietmayer, K. Recovering the Unseen: Benchmarking the Generalization of Enhancement Methods to Real World Data in Heavy Fog. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Long Beach, CA, USA, 16–20 June 2019; pp. 11–21. [Google Scholar]
- Bernardin, F.; Colomb, M.; Egal, F.; Morange, P.; Boreux, J. Droplet distribution models for visibility calculation. In Proceedings of the 5th International Conference on Fog, Fog Collection and Dew, Munster, Germany, 25–30 July 2010; pp. 2–5. [Google Scholar]
- Stewart, D.A.; Essenwanger, O.M. A survey of fog and related optical propagation characteristics. Rev. Geophys. 1982, 20, 489–495. [Google Scholar] [CrossRef]
- Pinnick, R.G.; Hoihjelle, D.L.; Fernandez, G.; Stenmark, E.B.; Lindberg, J.D.; Hoidale, G.B.; Jennings, S.G. Vertical Structure in Atmospheric Fog and Haze and Its Effects on Visible and Infrared Extinction. J. Atmos. Sci. 1978, 35, 2020–2032. [Google Scholar] [CrossRef][Green Version]
- Gerber, H.E. Microstructure of a radiation fog. J. Atmos. Sci. 1981, 38, 454–458. [Google Scholar] [CrossRef]
- Kunkel, B.A. Parameterization of droplet terminal velocity and extinction coefficient in fog models. J. Clim. Appl. Meteorol. 1984, 23, 34–41. [Google Scholar] [CrossRef]
- Garland, J.A. Some fog droplet size distributions obtained by an impaction method. Q. J. R. Meteorol. Soc. 1971, 97, 483–494. [Google Scholar] [CrossRef]
- Kumai, M. Arctic Fog Droplet Size Distribution and Its Effect on Light Attenuation. J. Atmos. Sci. 1973, 30, 635–643. [Google Scholar] [CrossRef]
- Kunkel, B.A. Fog Drop-Size Distributions Measured with a Laser Hologram Camera. J. Appl. Meteorol. 1971, 10, 482–486. [Google Scholar] [CrossRef][Green Version]
- Fuzzi, S.; Gazzi, M.; Pesci, C.; Vicentini, V. A linear impactor for fog droplet sampling. Atmos. Environ. 1980, 14, 797–801. [Google Scholar] [CrossRef]
- Goodman, J. The Microstructure of California Coastal Fog and Stratus. J. Appl. Meteorol. 1977, 16, 1056–1067. [Google Scholar] [CrossRef]
- Allen Zak, J. Drop Size Distributions and Related Properties of Fog for Five; Technical Report; April 1994; NASA: Washington, DC, USA, 1994. [Google Scholar] [CrossRef]
- Kunkel, B.A. Comparison of Fog Drop Size Spectra Measured by Light Scattering and Impaction Techniques; Technical Report; Air Force Geophysics Laboratory, Air Force Systems Command, United States Air Force: Washington, DC, USA, 1981. [Google Scholar]
- García-García, F.; Virafuentes, U.; Montero-Martínez, G. Fine-scale measurements of fog-droplet concentrations: A preliminary assessment. Atmos. Res. 2002, 64, 179–189. [Google Scholar] [CrossRef]
- Kunkel, B.A. Microphysical Properties of Fog at Otis AFB; Technical Report; Air Force Geophysics Laboratory, Air Force Systems Command, United States Air Force: Washington, DC, USA, 1982. [Google Scholar]
- Thies, B.; Egli, S.; Bendix, J. The influence of drop size distributions on the relationship between liquid water content and radar reflectivity in radiation fogs. Atmosphere 2017, 8, 142. [Google Scholar] [CrossRef]
- Zhao, L.; Niu, S.; Zhang, Y.; Xu, F. Microphysical Characteristics of Sea Fog over the East Coast of Leizhou Peninsula, China. Adv. Atmos. Sci. 2013, 30, 1154–1172. [Google Scholar] [CrossRef]
- Lu, C.; Liu, Y.; Niu, S.; Zhao, L.; Yu, H.; Cheng, M. Examination of Microphysical Relationships and Corresponding Microphysical Processes in Warm Fogs. Acta Meteorol. Sin. 2013, 27, 832–848. [Google Scholar] [CrossRef]
- Niu, S.; Lu, C.; Liu, Y.; Zhao, L.; Lü, J.; Yang, J. Analysis of the Microphysical Structure of Heavy Fog sing a Droplet Spectrometer: A Case Study. Adv. Atmos. Sci. 2010, 27, 1259–1275. [Google Scholar] [CrossRef]
- Meyer, M.B.; Jiusto, J.E.; Lala, G.G. Measurements of visual range and radiation- fog ( haze) microphysics. J. Atmos. Sci. 1980, 37, 622–629. [Google Scholar] [CrossRef]
- Hindman, E.E.; Ross Heimdahl, O.E. Calculated effects of haze droplets on visibility in natural and treated warm fogs. Opt. Acta 1979, 26, 671–678. [Google Scholar] [CrossRef]
- Gultepe, I.; Müller, M.D.; Boybeyi, Z. A new visibility parameterization for warm-fog applications in numerical weather prediction models. J. Appl. Meteorol. Climatol. 2006, 45, 1469–1480. [Google Scholar] [CrossRef]
- Gultepe, I.; Minnis, P.; Milbrandt, J.; Cober, S.G.; Nguyen, L.; Flynn, C.; Hansen, B. The Fog Remote Sensing and Modeling (FRAM) field project: Visibility analysis and remote sensing of fog. In Remote Sensing Applications for Aviation Weather Hazard Detection and Decision Support; International Society for Optics and Photonics: Bellingham, WA, USA, 2008; Volume 7088, p. 708803. [Google Scholar] [CrossRef]
- Deirmendjian, D. Electromagnetic Scattering on Spherical Polydispersions; American Elsevier Pub. Co.: New York, NY, USA, 1969. [Google Scholar] [CrossRef]
- Shettle, E.P.; Fenn, R.W. Models for the aerosols of the lower atmosphere and the effects of humidity variations on their optical properties. Environ. Res. Pap. 1979, 676, 89. [Google Scholar] [CrossRef]
- Mallow, J.V. Empirical fog droplet size distribution functions with finite limits. J. Atmos. Sci. 1975, 32, 440–443. [Google Scholar] [CrossRef][Green Version]
- Tampieri, F.; Tomasi, C. Size distribution models of fog and cloud droplets in terms of the modified gamma function. Tellus 1976, 28, 333–347. [Google Scholar] [CrossRef][Green Version]
- Duthon, P.; Bernardin, F.; Chausse, F.; Colomb, M. Methodology used to evaluate computer vision algorithms in adverse weather conditions. In Proceedings of the 6th Transport Research Arena, Warsaw, Poland, 18–21 April 2016. [Google Scholar]
- Colomb, M.; Duthon, P.; Bernardin, F. Spectral reflectance characterization of the road environment to optimize the choice of autonomous vehicle sensors. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1085–1090. [Google Scholar] [CrossRef]
- Cerema Adverse Weather Platform. 2018. Available online: https://www.cerema.fr/fr/innovation-recherche/innovation/offres-technologie (accessed on 4 June 2020).
- Li, Y.; Duthon, P.; Colomb, M.; Ibanez-Guzman, J. What happens for a ToF LiDAR in fog? Trans. Intell. Transp. Syst. 2020. accepted. [Google Scholar]
- Laj, P.; Fuzzi, S.; Ricci, L.; Orsi, G.; Berner, A. The size dependant composition of fog-drops. Trans. Ecol. Environ. 1999, 28, 464–469. [Google Scholar]
- Berg, O.H.; Swietlicki, E.; Frank, G.; Martinsson, B.; Cederfelt, S.I.; Laj, P.; Ricci, L.; Berner, A.; Ulrike, D.; Galambos, Z.; et al. Comparison of observed and modeled hygroscopic behavior of atmospheric particles. Contrib. Atmos. Phys. 1998, 71, 47–64. [Google Scholar]
- Schwenkel, J.; Maronga, B. Towards a Better Representation of Fog Microphysics in Large-Eddy Simulations Based on an Embedded Lagrangian Cloud Model. Atmosphere 2020, 11, 466. [Google Scholar] [CrossRef]
- Mazoyer, M. Impact du Processus d’activation sur les Propriétés Microphysiques des Brouillards et sur leur Cycle de vie. Ph.D. Thesis, University of Toulouse, Toulouse, France, 2016. [Google Scholar]
- Mazoyer, M.; Burnet, F.; Denjean, C.; Roberts, G.C.; Haeffelin, M.; Dupont, J.C.; Elias, T. Experimental study of the aerosol impact on fog microphysics. Atmos. Chem. Phys. 2019, 19, 4323–4344. [Google Scholar] [CrossRef]
- Hu, Y.X.; Stamnes, K. An accurate parameterization of the radiative properties of water clouds suitable for use in climate models. J. Clim. 1993, 6, 728–742. [Google Scholar] [CrossRef]
- European Center for Information and Communication Technologies. 2019. Available online: https://dense247.eu/home/ (accessed on 4 June 2020).
- Bijelic, M.; Muench, C.; Ritter, W.; Kalnishkan, Y.; Dietmayer, K. Robustness Against Unknown Noise for Raw Data Fusing Neural Networks. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, ITSC, Maui, HI, USA, 4–7 November 2018; pp. 2177–2184. [Google Scholar] [CrossRef]
- Kutila, M.; Pyykönen, P.; Ritter, W.; Sawade, O.; Schäufele, B. Automotive LIDAR sensor development scenarios for harsh weather conditions. In Proceedings of the IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 265–270. [Google Scholar] [CrossRef]
- Kutila, M.; Pyykönen, P.; Holzhüter, H.; Colomb, M.; Duthon, P. Automotive LiDAR performance verification in fog and rain. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Model | Measure |
|---|---|---|
| Transmissometer | Degreane Horizon TR30 | MORs from 10 to 500 m ± 1% and from 500 to 1000 m ± 5%. |
| Particle Size Analyser | PALAS WELAS 2100 | DSD of fog over the range 0.3–17 m in 60 classes of diameter in this range. uncertainty for total concentration above cm. |
| Rain gauge | LSI DQA136 | Rainfall rate from 0.2 to 60 mm h ± 0.2 mm h and from 60 to 600 mm h ± 1%. |
| Spectro-pluviometer | OTT Parsivel | Rainfall rate from 0.001 to 1200 mm h ± 5%, rain DSDs and velocity. |
| Video-photocolorimeter | TECHNOTEAM LMK 98-4 | Luminance from 0.003 to 50,000 cd m in the visible range. |
| Reference cameras | Xenics | Visible, near-infrared, short-waves infrared and long-wave infrared bandwidths. |
| Spectroradiometer | Spectral Evolution PSR3500+ | Spectral radiance in the range 350 to 2450 nm. |
| LWC | |||||||
|---|---|---|---|---|---|---|---|
| 1.00 | |||||||
| 0.75 | 1.00 | ||||||
| LWC | 0.98 | 0.63 | 1.00 | ||||
| 0.61 | 0.18 | 0.64 | 1.00 | ||||
| 0.66 | 0.24 | 0.70 | 0.99 | 1.00 | |||
| 0.69 | 0.31 | 0.73 | 0.96 | 0.99 | 1.00 | ||
| 0.72 | 0.42 | 0.75 | 0.85 | 0.91 | 0.96 | 1.00 |
| PCA Vector Number | Beta | Ntot | LWC | Dmoy | Eigen Value Ratio | |
|---|---|---|---|---|---|---|
| 0 | 0.572028 | 0.485398 | 0.530654 | 0.394436 | 1.0000 | |
| 1 | −0.035516 | −0.66099 | 0.0897689 | 0.744159 | 0.2986 | |
| 2 | −0.310566 | 0.545225 | −0.563421 | 0.537433 | 0.0718 | |
| 3 | −0.758335 | 0.173813 | 0.626821 | 0.0425807 | 0.0025 |
| FCC | ||
|---|---|---|
| PCA Vector 1 | PCA Vector 2 | 0.930 |
| 0.922 | ||
| 0.831 | ||
| LWC | 0.793 | |
| LWC | 0.741 | |
| 0.709 | ||
| LWC | 0.523 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duthon, P.; Colomb, M.; Bernardin, F. Fog Classification by Their Droplet Size Distributions: Application to the Characterization of Cerema’s Platform. Atmosphere 2020, 11, 596. https://doi.org/10.3390/atmos11060596
Duthon P, Colomb M, Bernardin F. Fog Classification by Their Droplet Size Distributions: Application to the Characterization of Cerema’s Platform. Atmosphere. 2020; 11(6):596. https://doi.org/10.3390/atmos11060596
Chicago/Turabian StyleDuthon, Pierre, Michèle Colomb, and Frédéric Bernardin. 2020. "Fog Classification by Their Droplet Size Distributions: Application to the Characterization of Cerema’s Platform" Atmosphere 11, no. 6: 596. https://doi.org/10.3390/atmos11060596
APA StyleDuthon, P., Colomb, M., & Bernardin, F. (2020). Fog Classification by Their Droplet Size Distributions: Application to the Characterization of Cerema’s Platform. Atmosphere, 11(6), 596. https://doi.org/10.3390/atmos11060596