1. Introduction
By providing sources of energy, the atmospheric boundary layer (ABL) plays a major role in the development of many meteorological phenomena, including convective initiation and tornado-genesis [
1]. For example, knowledge of the ABL stability and strength of the inversion at the top of the ABL are critical in severe weather prediction [
2]. Improved observational coverage of the ABL will (1) provide better input for numerical weather models, (2) contribute to the improvement of ABL parameterizations, and (3) increase the understanding of ABL processes. Unfortunately, the current observations of the ABL are inadequate. Towers do not reach high enough [
2,
3]; 10 m is standard, although towers as high as 300 m exist [
4]. Rawinsondes (or weather balloons) only provide a snapshot of the ABL, because they are only typically released twice daily [
2]. Weather balloons also ascend too rapidly through the lowest levels of the ABL [
3] and the location of the vertical profiles is dependent on atmospheric conditions [
5]. Furthermore, the sensor package is typically not recoverable for reuse [
3]. Surface-based remote sensing instruments, like microwave radiometers, wind profilers, and sodars, provide vertical profiles at a single point and, therefore, do not provide good horizontal resolution [
2]. The same applies to tethered balloons. Surface-based remote sensing instruments also have difficulty resolving thermodynamic fields near the surface [
2,
6]. Radar provides good horizontal coverage, but it might overshoot the ABL and does not provide thermodynamic information (temperature and relative humidity). Satellite remote sensors can measure vertical thermodynamic and kinematic profiles with good horizontal coverage, but vertical resolutions in the ABL are too coarse [
3].
An advantage of small unmanned aerial vehicles (UAV)s is their ability to fly in airspaces or situations that are too difficult or dangerous for manned aircraft, such as, for example, in and around thunderstorms [
7] or at low altitude [
8]. UAVs are perfectly suited for taking observations in sensitive ecosystems [
5]. An advantage of rotary wing UAVs over their fixed-wing cousins is their capability to (1) hover; (2) ascend vertically at a fixed horizontal location [
3,
7]; and, (3) land on a small spatial footprint [
3]. Other scenarios where UAVs can play a role in atmospheric sensing are (1) to determine atmospheric stability and wind characteristics in the event of dangerous gas releases [
1,
5]; (2) monitoring freezing conditions around temperature-sensitive crops, like citrus; (3) investigating micro-climates in farm fields for precision agriculture; and, (4) observing the structure of meteorological phenomena, like sea breezes and cold fronts.
The recent development of low-cost, easy to use small UAV, and miniaturized thermodynamic sensors have enormous potential to help close the gap in ABL observations [
2,
3,
6]. With the development of UAV technology, however, comes the need to improve knowledge of best practices for accurate measurement [
7]. The calibration of meteorological sensors is performed under controlled laboratory conditions [
9]. However, calibration or reliance on manufacturer specifications is not sufficient for determining the accuracy and reliability of atmospheric measurements that are made by UAVs, because they do not account for the impacts of turbulence, solar heating, sensor placement on the platform, and how accurately the actual atmosphere is represented.
Therefore, validating sensors that are intended for the use on UAVs is another critical step towards acquiring accurate UAV-based measurements [
9]. Validation is performed by comparing measurements from UAV sensors to collocated measurements from independent instruments of generally accepted high quality. Several researchers have recently investigated the validation of sensors in laboratory and field settings, as well as optimal sensor placement on the UAV platform as a function of external (to the sensor) heating sources and aspiration. The results from laboratory and stationary field testing are addressed here. Optimal sensor placement on the UAV will be examined in a companion paper. Only the results from prior temperature sensor comparisons are summarized here.
In [
2], the accuracy and precision of the International Met Systems Inc.’s iMET-XQ sensor was evaluated. The iMET-XQ sensors used were the original version without the aluminum coating. First, the accuracy of the sensors was assessed by comparing the iMET-XQ temperature measurements with a National Institutes for Standards and Technology (NIST)-traceable Thermometrics platinum resistance thermometer (PRT) standard, in a calibration chamber. In the chamber, three temperature (T = 10, 20, and 30 °C) and five relative humidity (RH = 20, 40, 60, 80, and 94%) set points were used, for a total of 15 Temperature/Relative Humidity (T/RH) combinations. Three iMET-XQ sensors were tested, and a fan aspirated the chamber. The authors reported “the temperature measurements from all three iMET-XQ sensors were typically within ±0.1 °C of the NIST-traceable Thermometrics PRT standard”. They noted a cool bias in the iMET-XQ measurements of up to 0.3 °C at low temperature and RH combinations, most notably at the 10 °C and 20% RH set point. It was concluded that the chamber measurements from the iMET-XQ sensors were within manufacturer specifications (accuracy of ±0.3 °C).
Next, ref. [
2] conducted field experiments on an instrumented tower. The experiments took place at a site near Knoxville, Tennessee. The iMET-XQ measurements were compared to an aspirated Thermometrics PRT. The iMET-XQ sensors were installed inside a radiation shield on the tower, at 2 m above ground level (AGL), adjacent to the PRT. When none of the sensors were aspirated, the correlation coefficient (r) between the iMET-XQ and tower sensor temperature measurements was 0.95. When all of the sensors were aspirated, r dropped slightly to 0.94, but this could be due to random error. It was not reported how long the experiments lasted, how many experiments were conducted, or what time of year they took place. Temperature difference statistics were not reported.
The iMET-XQ temperature sensors are bead thermistors. Thermistors can suffer from self-heating when a current is continually run through them [
3]. In ref. [
3], an experiment to assess the effects from thermistor self-heating was conducted. A fan, pulling air across three iMET-XF PT 100 thermistors at 6 m s
−1, was alternately switched on and off for periods of 2–3 min each. The experiment took place in an indoor chamber. After the fan was turned on, the temperatures measured by the iMET-XQ thermistors dropped over 1 °C in under 20 s. After the fan was off, the sensors measured a temperature increase. It is concluded that this heating was due to a combination of sensor self-heating and the fan motor radiating heat towards the sensors. Proper aspiration can minimize the thermistor self-heating bias [
3,
6].
In ref. [
6], chamber experiments to assess the bias (accuracy) and precision of iMET-XF PT 100 thermistors were conducted, as well as the effects from using aspirated shields. Three sensors were placed inside an aspirated L-duct, inside a chamber. The temperature was varied between 10 and 30 °C, changing 10 °C every hour. Three more sensors were placed in an aspirated chamber, in which the temperature varied over a larger range: −40 to 60 °C, changing by 10 °C every ten minutes. Linear temperature biases were obtained for each thermistor by comparing 1-min. averaged measurements to National Institute of Standards and Technology (NIST) traceable sensors. Additionally, 1-s temperature averages were used to compute mean absolute temperature differences (MATD) between the sensors themselves, while taking the previously determined sensor biases into account. This was done for every 1-s interval to obtain a distribution of MATDs (their formula 1). For the L-duct sensors, the entire MATD distribution was below 0.09 °C with an interquartile range (IQR) of 0.06 °C. Therefore, it was concluded that the sensors in the L-duct are highly precise under steady-state conditions with constant fan aspiration. For the rotor arm sensors, 95% of the MATDs were below 0.12 °C with an IQR of 0.05 °C. The reason for this distribution to be more skewed was attributed to the larger temperature range to which the sensors were subjected in the chamber.
Past studies have explored the importance of aspiration of UAV-based sensors in radiation shields, because radiation shields or other sensor enclosures may warm in sunny conditions. In [
7], measurements from many different UAVs and multiple sensor types and configurations were compared to measurements from an 18 m tower. Some of the temperature sensors were aspirated (by rotorwash), some were shielded, some were neither, and some were both. Temperature measurements from shielded, but unaspirated, sensors showed the warmest bias when compared to the reference on the tower, sensors that were neither shielded nor aspirated showed a slightly smaller warm bias, and sensors that were both shielded and aspirated reported the smallest warm bias (their Figure 10). Sensors that were unshielded but aspirated showed a small cool bias. In [
10], the sensors were mounted underneath the body of a rotary wing UAV; this way, the sensors were shielded from solar radiation. Aspiration came from the motion of the UAV relative to the air (it ascended and descended at a rate of 3.0 m s
−1). The measurements were compared to sensors on a tethered weather balloon [
11]. The maximum deviations between the UAV and balloon measurements did not exceed manufacturer specified accuracy figures.
From prior chamber experiments, it was concluded that the iMET-XQ temperature measurements were within the manufacturer specified accuracy of a NIST-traceable standard [
2]. Hence, chamber experiments will not be repeated in the current study. It was also reported that thermistors are prone to self-heating, but this can be mitigated by proper aspiration [
3,
6]. No guidelines were given to define ‘proper’, for example, an air flow speed. To our knowledge, in the past, only one experiment was conducted with iMET-XQ sensors in a stationary location on an instrumented tower [
2]. However, this experiment involved only iMET-XQ sensors in a radiation shield and results from varying weather conditions were not addressed.
In this study, aluminum coated iMET-XQ sensors were used to address their accuracy and precision in a stationary position on an instrumented tower, while being subjected to varying weather conditions. A large number of experiments were conducted to include a wide variety of solar radiation and wind conditions. Unexposed temperature measurements are compared to shielded measurements to assess the need for a radiation shield, given that the iMET-XQ sensor is aluminum coated. Past studies have confirmed that radiation shields may warm under sunny conditions [
6,
11], therefore, the aluminum coating may be a good alternative.
2. Data and Methodology
In this study, the performance of the iMET-XQ (InterMET Inc.) temperature sensor under various weather conditions is evaluated. It is intuitively obvious and has been well documented in the literature [
12] that the accuracy of temperature sensors decreases when exposed to direct sunlight. The versions of the iMET-XQ sensors that were used in these experiments are coated in aluminum to reduce warming effects from solar and terrestrial radiation. This is based on radiosonde technology; radiosondes are ventilated by the relative airflow during flight [
13,
14]. The manufacturer specified accuracy of the iMET-XQ bead thermistor sensor is ±0.3 °C and the response time is two seconds.
All of the experiments were conducted at the South Alabama Mesonet [
15] weather station on the campus of the University of South Alabama. The tower has temperature sensors at four levels: 1.5, 2, 9.5, and 10 m AGL. The sensors at 1.5 and 9.5 m are a model 107 thermistor probe from Campbell Scientific Inc. with a manufacturer stated accuracy of ±0.4 °C for a temperature range of −24 to 48 °C. At 2 m and 10 m, HMP45C (Campbell Scientific Inc.) platinum resistance temperature detectors are used. The accuracy of this sensor ranges between ±0.2 °C at 20 °C and ±0.3 °C at 40 °C and 0 °C. All temperature sensors are housed in radiation shields that are aspirated by the wind. Wind speed is measured at two levels (2 and 10 m) by R. M. Young 05103 propeller wind monitors. Solar radiation is measured by a Li-Cor LI200R-PT pyranometer and vertical wind speed is measured at 10 m while using an R.M. Young 27016T propeller anemometer. The tower temperature and wind speed measurements are minute averages. The iMET-XQ 1 Hz measurements are averaged over corresponding minutes in order to calculate consistent temperature differences and to quantify statistical relationships with meteorological parameters. Pyranometer measurements are taken once per minute at the beginning of each minute. Vertical windspeed measurements consist of an instantaneous measurement at the beginning of each minute, as well as a minimum and maximum measurement during each minute. To obtain an approximation of a minute average, the absolute values of the minimum, maximum, and instantaneous vertical wind speed measurements are averaged each minute.
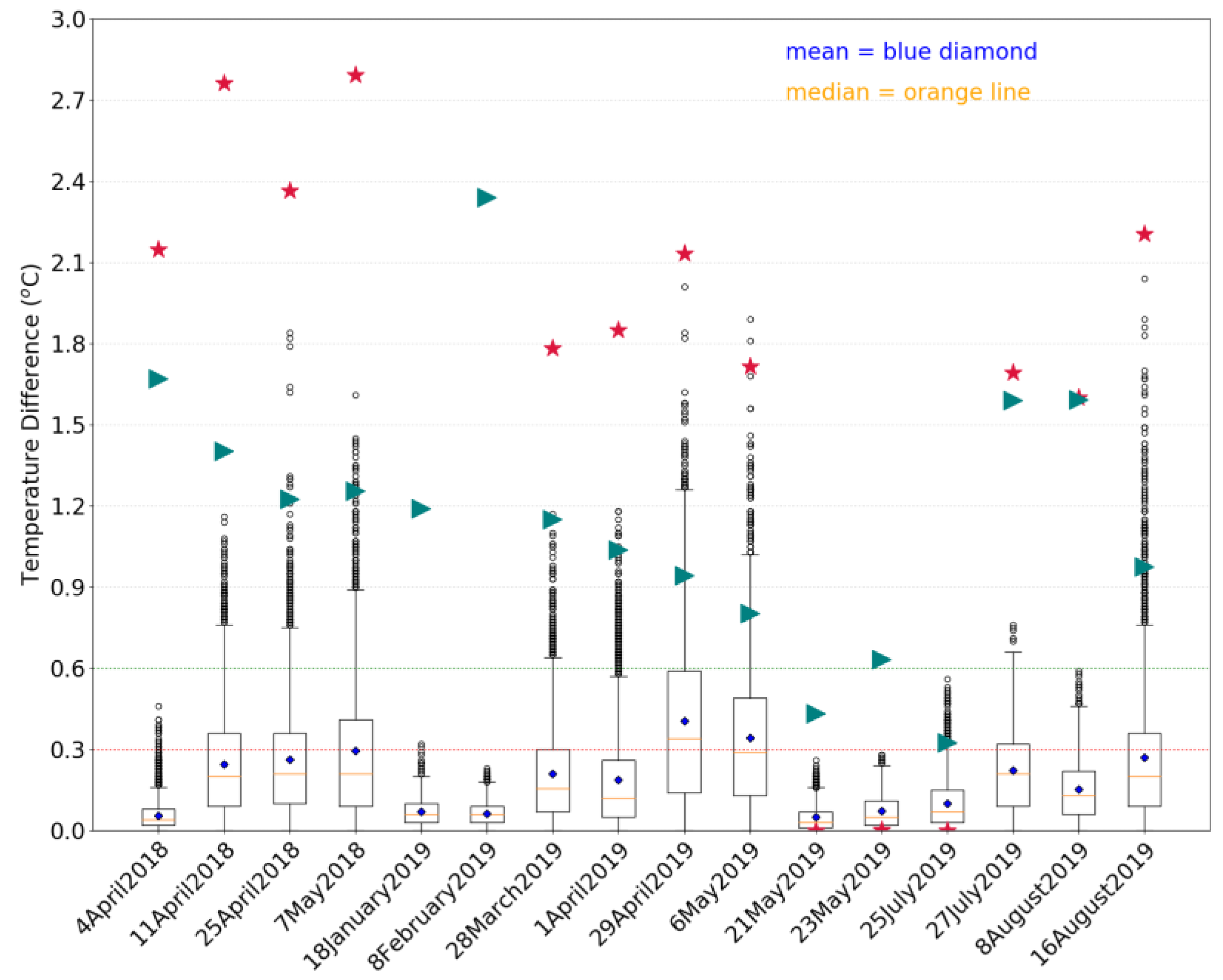
The experiments were conducted in the spring of 2018 and 2019 and in the summer of 2019. Two sets of experiments were conducted to evaluate the performance of the iMET-XQ: (1) Tower and (2) Radiation Shield experiments (details below).
Table 1 and
Table 2 list dates and other information for each set of experiments.
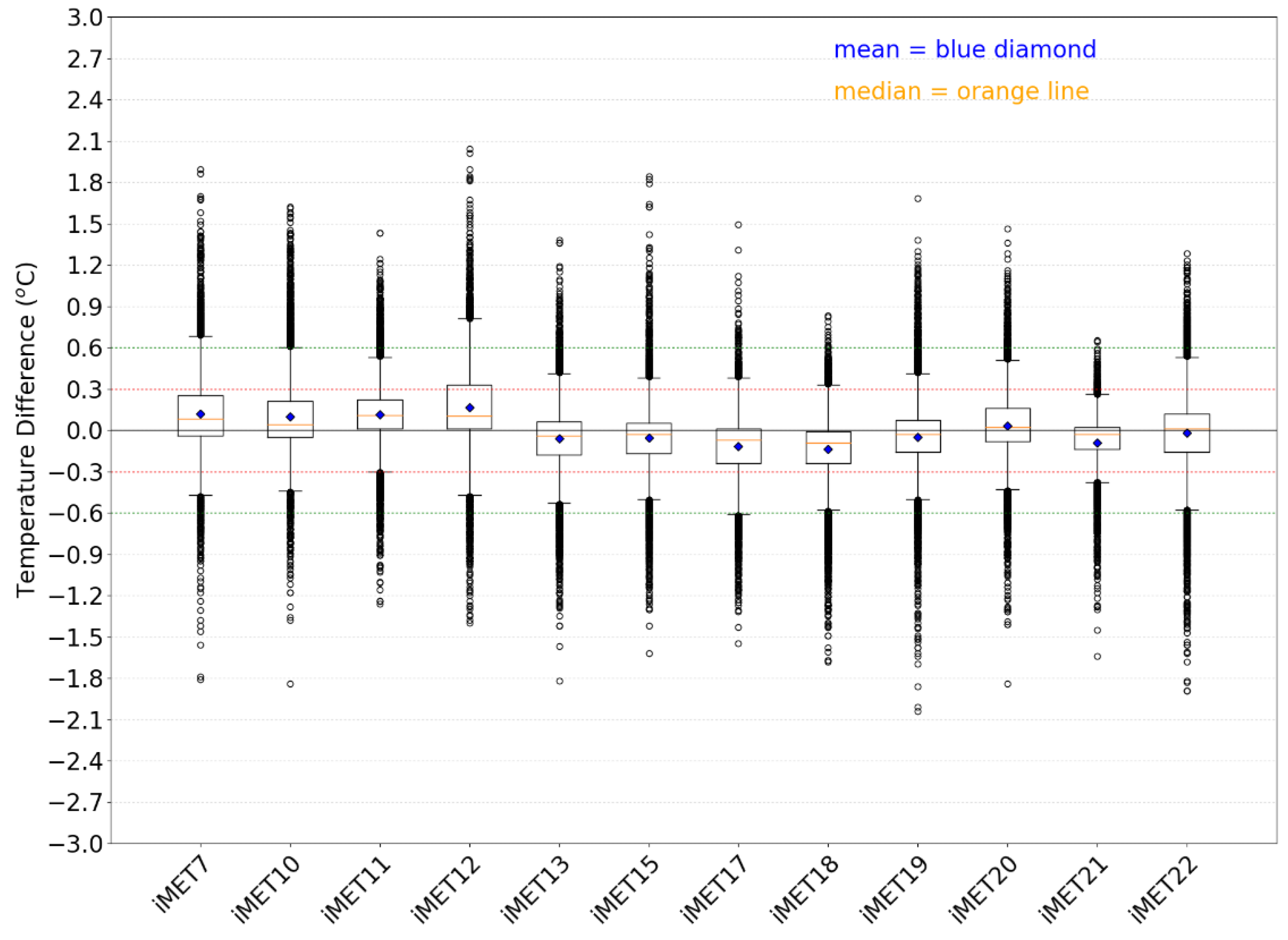
The goal of the Tower experiments is to assess iMET-XQ accuracy and precision, in a fixed location, under various weather conditions. Twelve different iMET-XQ sensors were placed side-by-side on a wooden board suspended, facing north, from the 2 m cross-arm of the Mesonet tower (
Figure 1). In this manner, their elevation was almost equivalent to the 1.5 m thermistor on the tower. Hence, this sensor will function as the standard reference sensor to which the iMET-XQ temperatures are compared to assess the accuracy. The iMET-XQ sensors are inter-compared with one-another to assess the precision of the iMET-XQ temperature sensors. The closer the measurements are to one another, the more precise the sensors are. Since 12 iMET-XQ sensors were used, there are 66 possible unique pairs of iMET-XQ sensors. The iMET-XQ sensors are not compared to themselves. The iMET-XQ sensors were given numbers for easy identification.
In the Radiation Shield experiments, one iMET-XQ was placed in an identical radiation shield as that used for the 2 m HMP-45C temperature sensor to assess the need for a radiation shield on the aluminum-coated iMET-XQ sensors. The radiation shields were located 76 cm apart, at the same height, on the 2 m cross-arm of the Mesonet tower. An exposed -XQ sensor was placed next to the shielded iMET-XQ sensor, at the same height.
Figure 1 and
Figure 2 show the configuration. The same two iMET-XQ sensors were used in each of the 16 Radiation Shield experiments. The iMET-XQ temperature measurements were compared to the HMP-45C temperature measurements.
Data Quality Control (QC)
Both iMET-XQ and tower data were quality controlled by using automated range checks. Upper and lower limits of the range tests (
Table 3) were the same for both platforms. Values that were outside of these limits were set to missing. Following the automated QC range test, the timeseries of all experiments were manually reviewed for data outliers. Outliers were identified by comparison to like sensors. For temperature, these consisted of the temperatures from all iMET-XQ sensors and from the 1.5 m and 2 m tower sensors. The 2 m wind speed and direction values were compared to 10 m wind speed and direction. Solar radiation was compared to photosynthetically active radiation, also recorded by the South Alabama Mesonet. After completing the range test, it became clear that the pyranomter on the mesonet tower malfunctioned on three experiment days (18 January, 6 January, and 8 February 2019) and the data were set to missing. The same applied for iMET21’s temperature sensor, which malfunctioned (recorded large negative values) beginning on 12 March 2019. The manual like-sensor tests did not flag any extreme outliers and no data were set to missing as a result. Sometimes, the iMET-XQ sensors randomly lost Global Positioning System (GPS) connectivity, in those cases, no data were collected. The missing data include data that were discarded after the QC process as well as data missing due to loss of GPS connectivity.
4. Conclusions
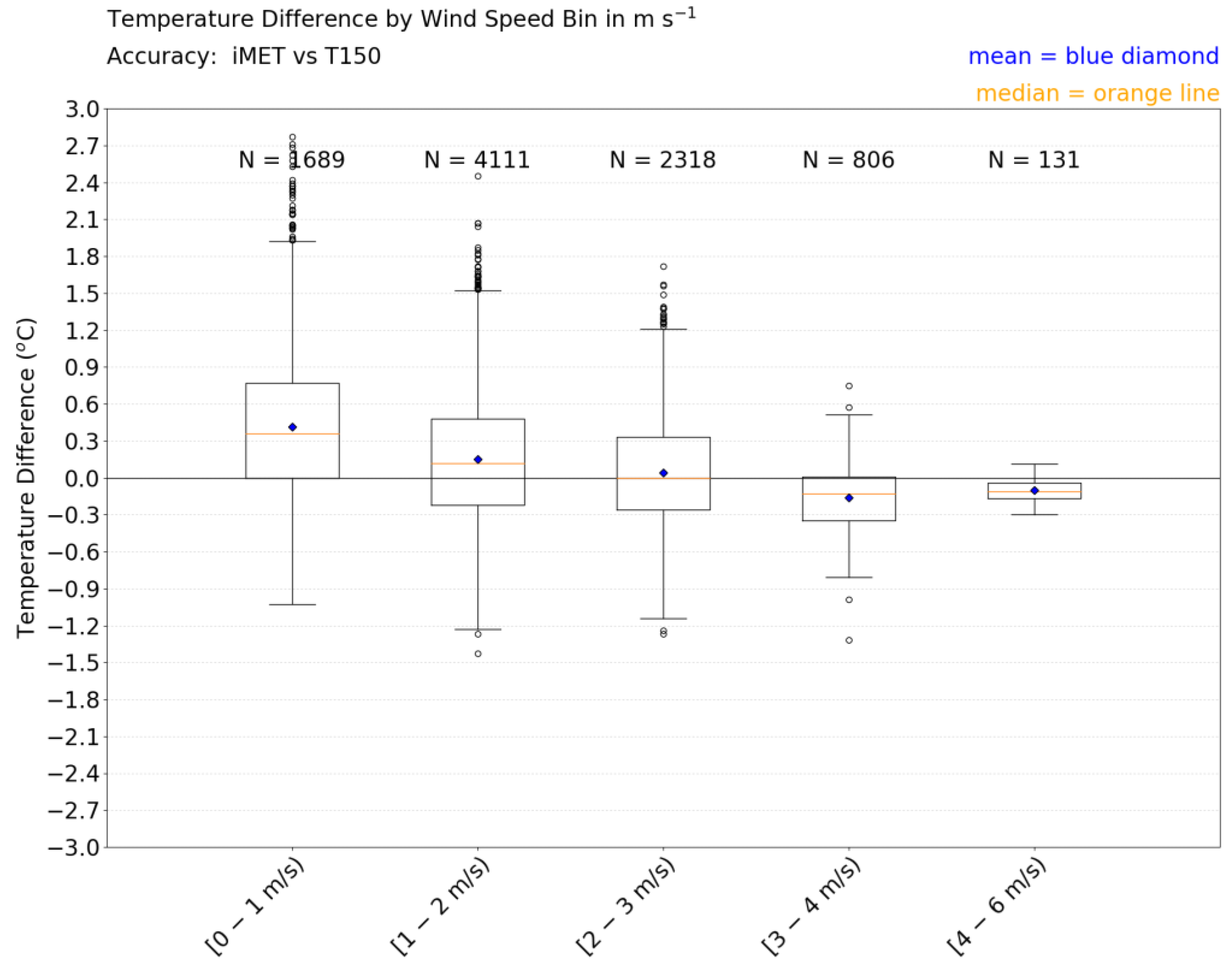
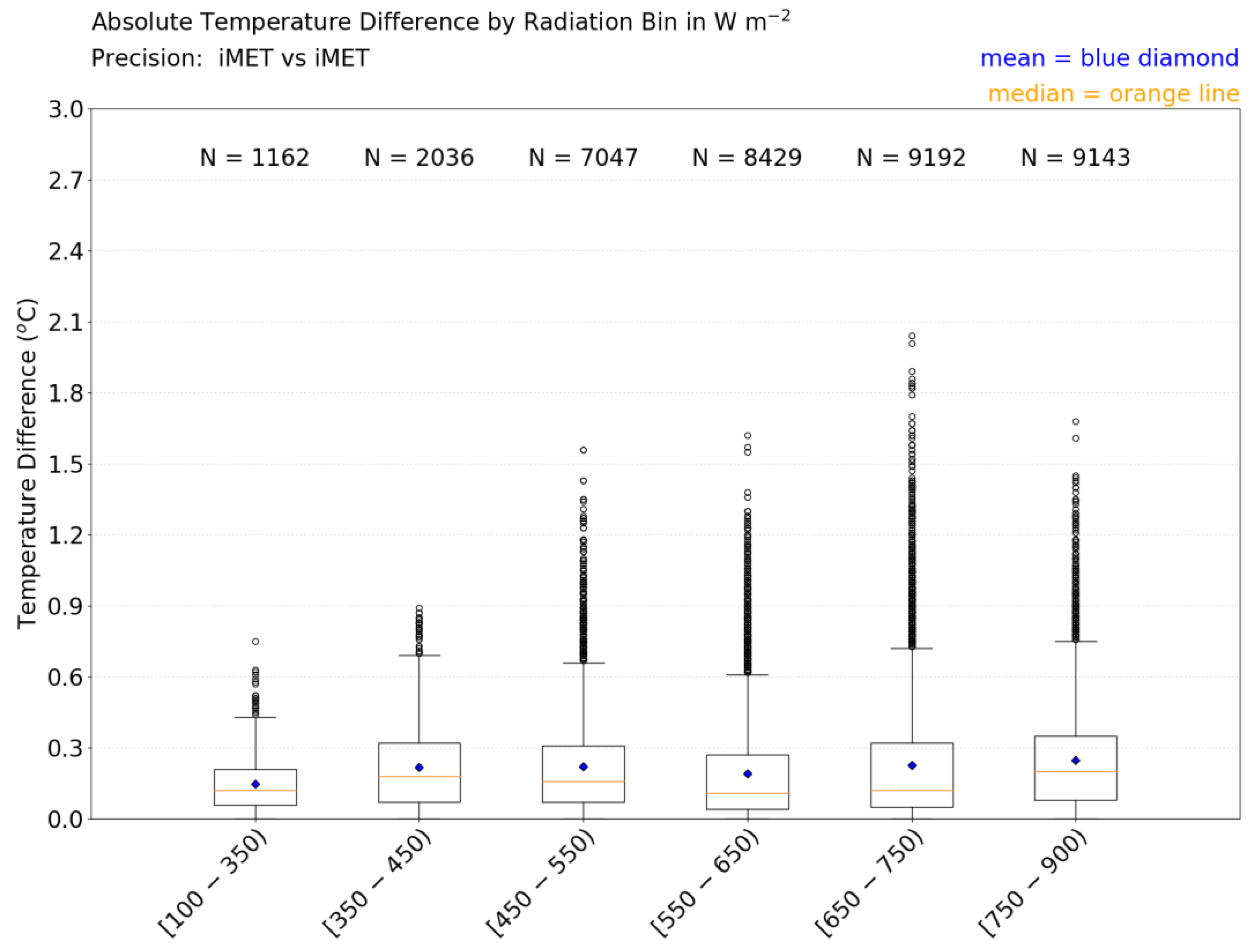
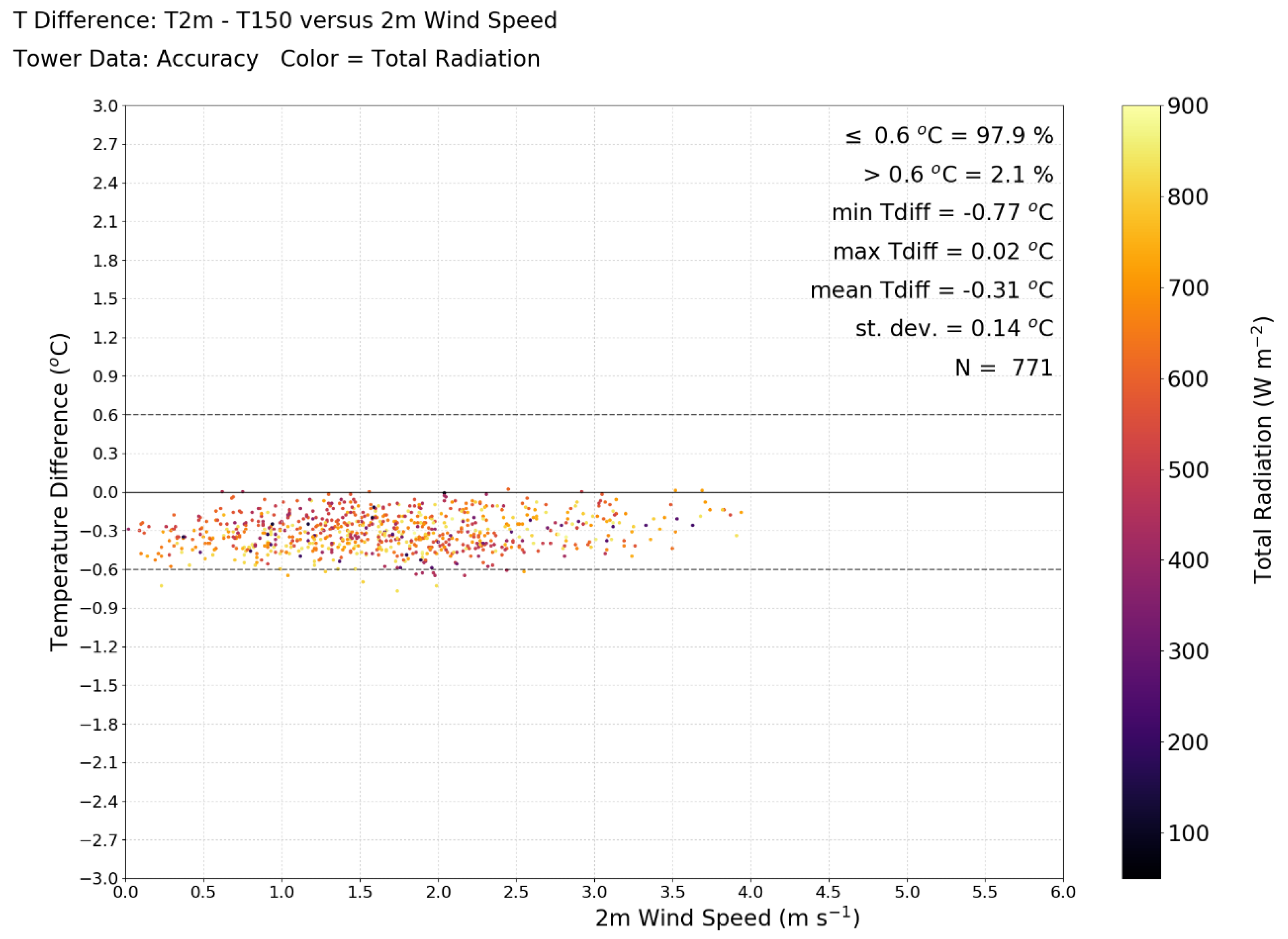
iMET-XQ temperature precision and accuracy was assessed in outdoor conditions, while the sensors were mounted on an instrumented tower under a range of solar radiation and wind speed conditions. Precision was assessed by comparing the sensors to one another. Accuracy was assessed by comparing the iMET-XQ temperatures to a standard reference sensor (also a thermistor) on the tower. The iMET-XQ sensors were considered to be precise and accurate when temperature differences with one another or the reference sensors were within manufacturer specified sensor accuracy. Temperature differences of less than the sum of both sensor accuracies (assuming the bias from each sensor was in the same direction) were also deemed as acceptable.
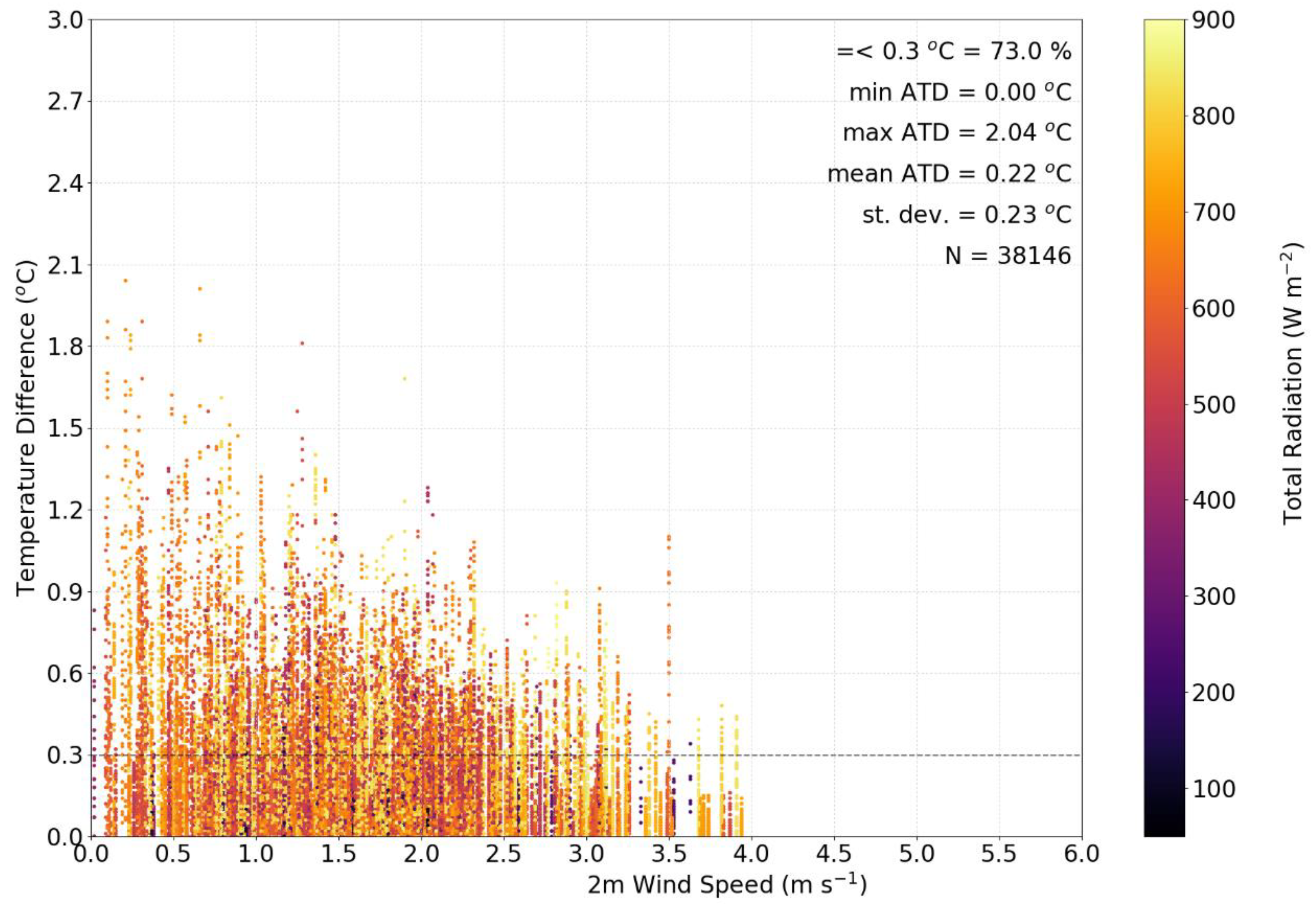
The iMET-XQ thermistors were extremely precise in optimal outdoor conditions with solar radiation values close to zero, even when limited aspiration occurred (wind speed values below 2 m s−1).
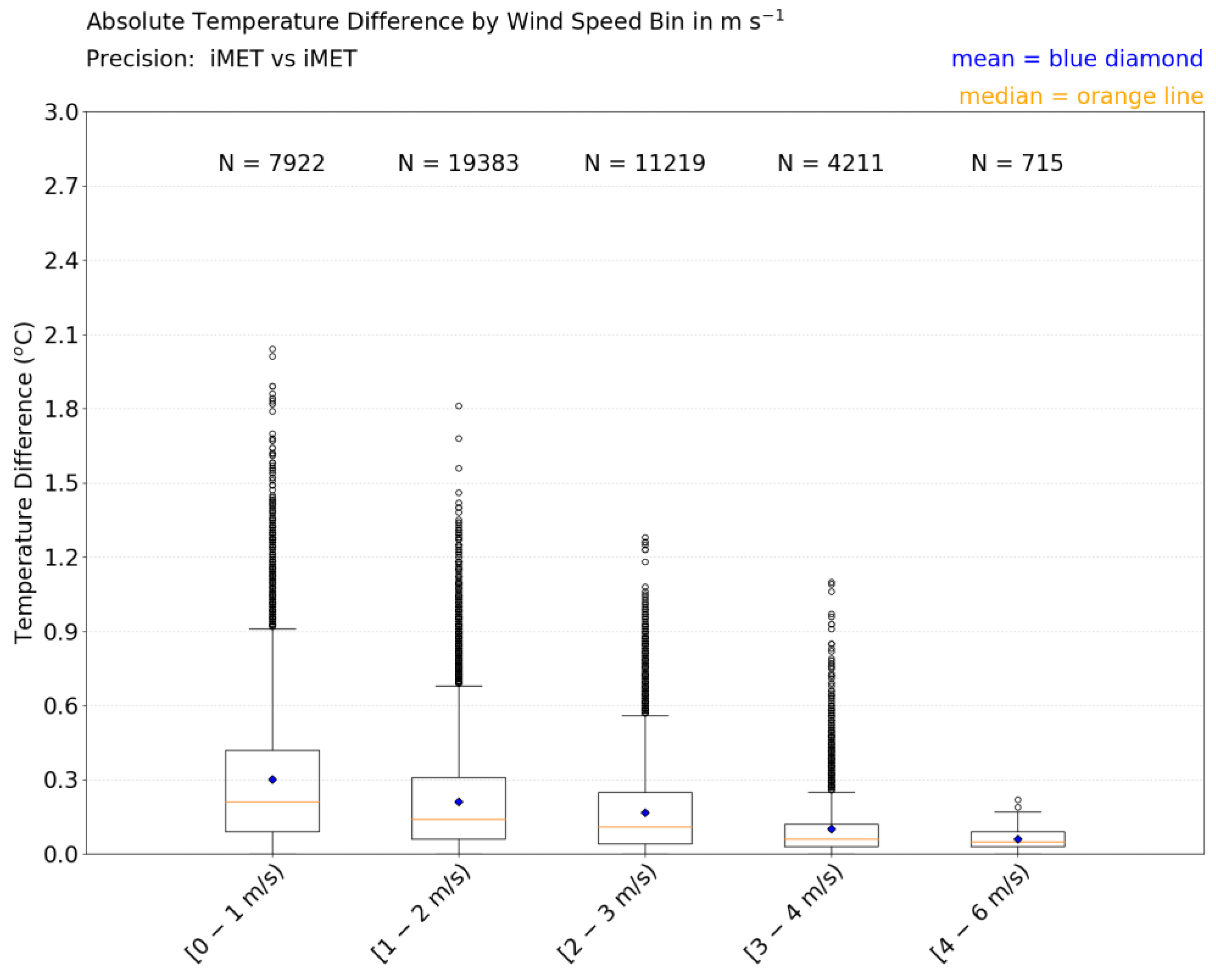
The spread and mean values of temperature differences between iMET-XQ sensor pairs both decrease with increasing wind speed, and these differences are statistically significant. Not unexpectedly, but for the first time quantified, the precision of the iMET-XQ temperature measurements in an outdoor setting increases with increasing wind speed. In lower wind speeds, any solar radiation value that is above zero can cause temperature differences between individual sensors to be large, even if they are located side-by-side facing the same direction relative to the sun. Individual sensors may randomly warm due to self-heating and/or long-wave radiation emitted from surrounding objects. Sufficient aspiration allows for the sensors to take more consistent temperature measurements.
Just like iMET-XQ temperature precision, the accuracy of iMET-XQ temperature measurements improves with an increasing windspeed. No significant improvement in accuracy is observed for wind speeds larger than 3 m s−1. Hence, this speed is recommended for optimal sensor aspiration. However, the optimal aspiration value for the iMET-XQ might well be lower, because the tower sensor’s accuracy also improves with increased wind speed (its radiation shield is naturally aspirated by wind speed), which causes the iMET-XQ and tower measurements to converge. It was also shown that the wind speed threshold value that is required for compensating for iMET-XQ sensor warming due to solar radiation appeared to depend on the magnitude of the solar radiation. This further affirms the conclusion that aspiration values lower than 3 m s−1 may be fine, except in extremely sunny conditions.
It was shown that sufficient aspiration might, in fact, occur for wind speeds of 2 m s−1, except in extremely sunny conditions. Therefore, when mounting iMET-XQ sensors on a UAV, it is recommended that, if at all possible, the UAV either fly at 3 m s−1, be embedded in winds of those speeds, or to use the propeller wash of the vehicle to aspirate the sensors. In overcast conditions, winds as low as 2 m s−1 will suffice to aspirate the iMET-XQ.
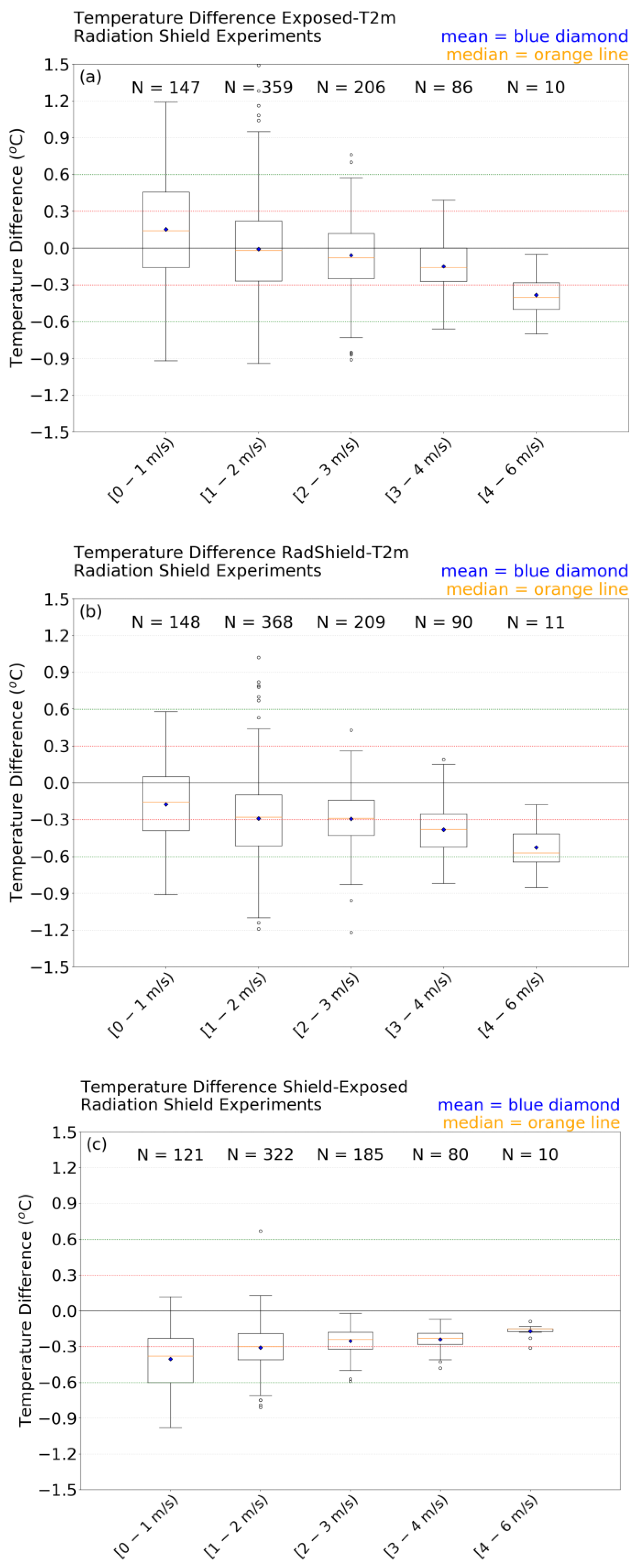
It was concluded that the aluminum coating on the iMET-XQ sensor is effective at minimizing sensor warming from both long-wave and short-wave radiation by comparing temperature measurements from shielded and unshielded iMET-XQ sensors to those of the shielded HMP-45C sensor on the tower.
In strong wind speeds, an exposed iMET-XQ sensor almost always records a cooler temperature than the shielded reference sensor on the tower, no matter the radiation values. The iMET-XQ sensor’s aluminum coating minimizes heating from short-wave radiation. Additionally, the exposed sensor is completely unobstructed and wind freely flows around it providing optimal aspiration. In weak wind speeds (<2 m s−1), the performance of the iMET-XQ depends on solar radiation values. In overcast conditions, the sensors’ temperatures converge because there is less solar radiation to warm the sensors. In sunny and calm conditions, the iMET-XQ’s aluminum coating is not sufficient to offset the lack of aspiration and, as a result, the sensor warms up more than the shielded reference sensor on the tower. This means that an exposed iMET-XQ sensor performs well in most cases, except in very sunny and calm conditions.
A shielded iMET-XQ sensor almost always records cooler temperatures than the shielded reference sensor on the tower. It is concluded that the aluminum coating on the iMET-XQ sensor is effective in preventing the sensor from warming due to the long wave radiation emitted from the radiation shield.
Not unexpectedly, a shielded iMET-XQ almost exclusively records cooler temperatures than an exposed iMET-XQ sensor. However, the spread in temperature difference decreases and temperature differences approach zero as the wind speed increases. This confirms that the iMET-XQ sensors do not need to be shielded in stronger winds; an exposed unit records almost identical temperatures to a shielded unit so long as the aspiration is adequate. For wind speeds over 2 m s−1, all of the temperature differences are within twice the manufacturer specified accuracy.
In conclusion, it can be stated that the aluminum coating on the iMET-XQ sensor works well, except in very sunny (>400 W m−2) and calm conditions (winds < 2 m s−1). Therefore, the iMET-XQ sensors with aluminum coating do not need to be shielded. However, they do need to be aspirated. When they are, they are precise and accurate.
The iMET-XQ sensors perform best at dusk, but most UAV flights are likely to occur during the day when solar radiation values are high. Thankfully, the winds also usually increase during the day time due to turbulence. Furthermore, the iMET-XQ sensors can be placed in a location on the UAV, where they are aspirated by propeller wash and will gain additional aspiration if the UAV moves vertically or flies horizontal transects.
In a follow up paper [
16], an application is presented to illustrate that the uncertainties in the temperature measurements that are presented in this paper are insignificant when observing atmospheric phenomena, like morning inversions or sea breeze structure, or when measuring temperatures over an agricultural field, for example. However, when used for numerical weather model initialization or to study convective initiation, temperature accuracy should be even more accurate. An informal consensus of atmospheric scientists, National Weather Service, and other subject matter experts in the community [
9] recommended that, for temperature, the measurement accuracy goal should be ±0.2 °C. When properly aspirated, the iMET-XQ temperature sensors are certainly capable of reaching this level of accuracy. The tower data that were collected in the current study were examined for this level of accuracy. It was found that, for wind speeds between 3 and 4 m s
−1, 51.5% of the absolute values of TD are below 0.2 °C. For wind speeds between 4 and 6 m s
−1, 84.0% of the absolute values of TD are below 0.2 °C. The rotor wash from an off-the-shelf UAV was measured in [
16] and directly beneath the propellers, an inch below the propellers, was found to be between 3 and 3.5 m s
−1. Accordingly, if placed under the propellers the accuracy will be at the required level at least 50% of the time. Therefore, in extremely sunny conditions, the sensors may also need to be shielded to reach this level of accuracy. Work is in progress to develop specialized UAVs with such capabilities [
3,
6].



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











