Three-Dimensional Wind Measurements with the Fibered Airborne Coherent Doppler Wind Lidar LIVE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Experiments
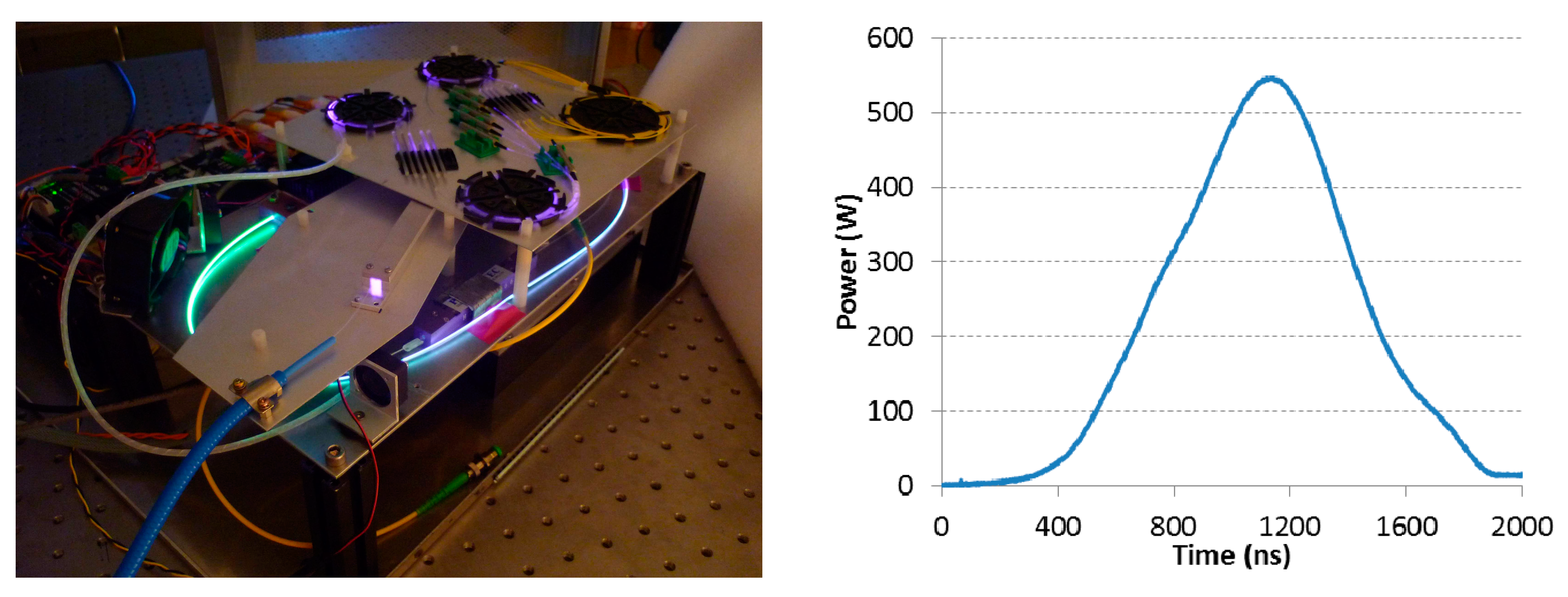
2.1. Fiber Laser Design
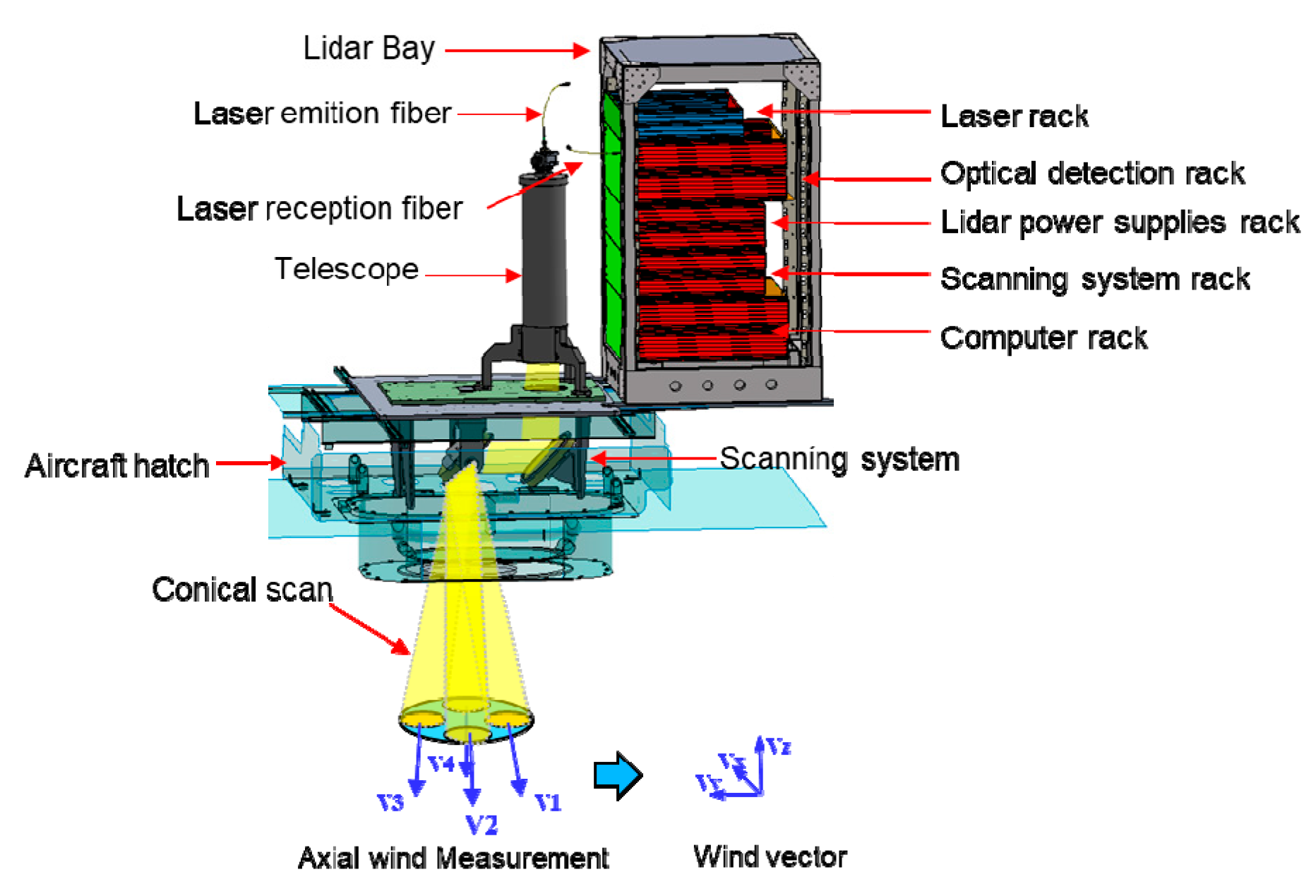
2.2. Lidar Design
- A rack for various Lidar power supplies.
- A control rack for the scanning system.
- A rack for the emission of the Lidar beam including the Onera laser source.
- A rack for the Lidar signal reception and its coherent detection.
- A rackable computer for real time processing.
2.3. Lidar Signal Processing
3. Results
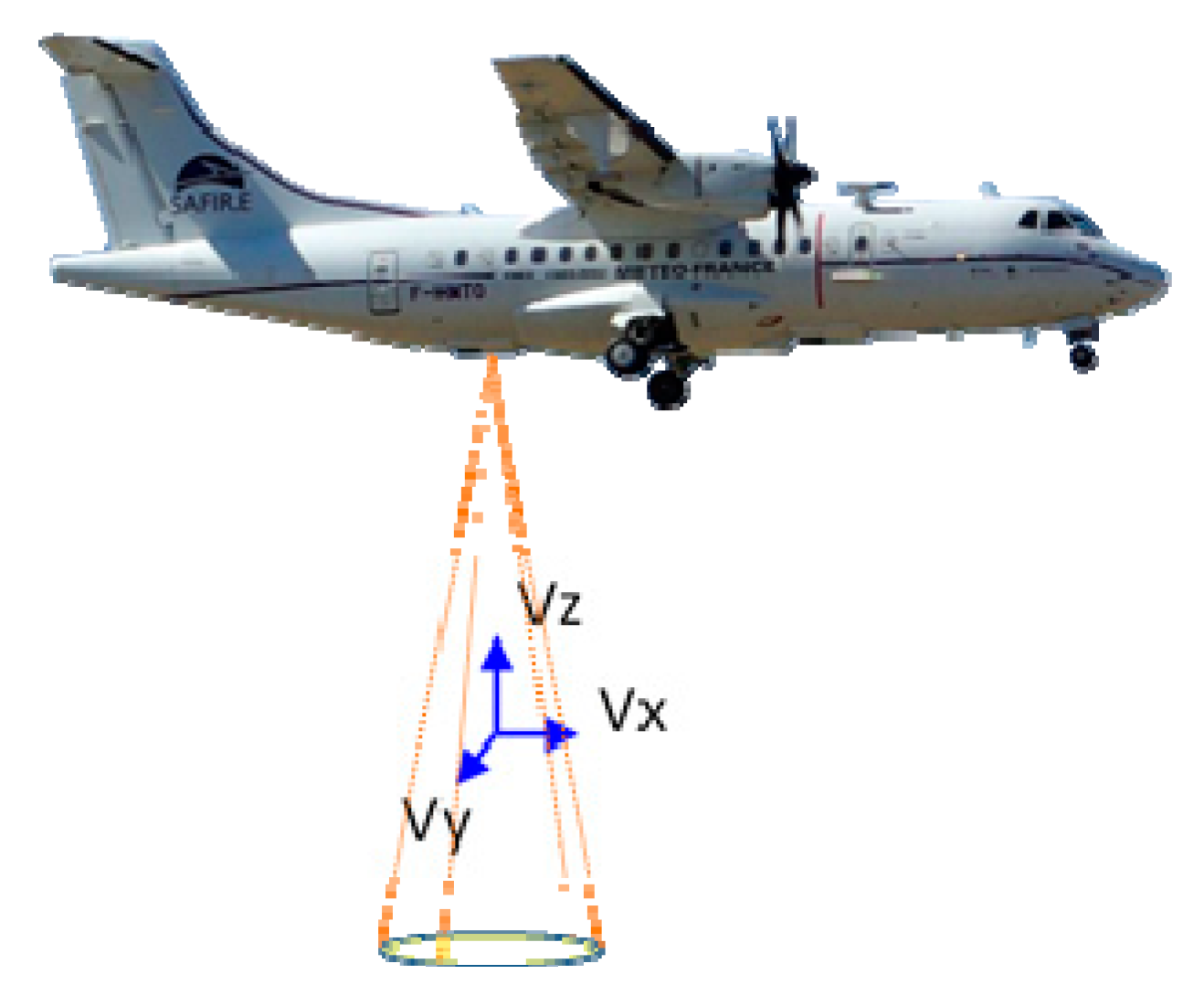
3.1. Flight Test Campaign
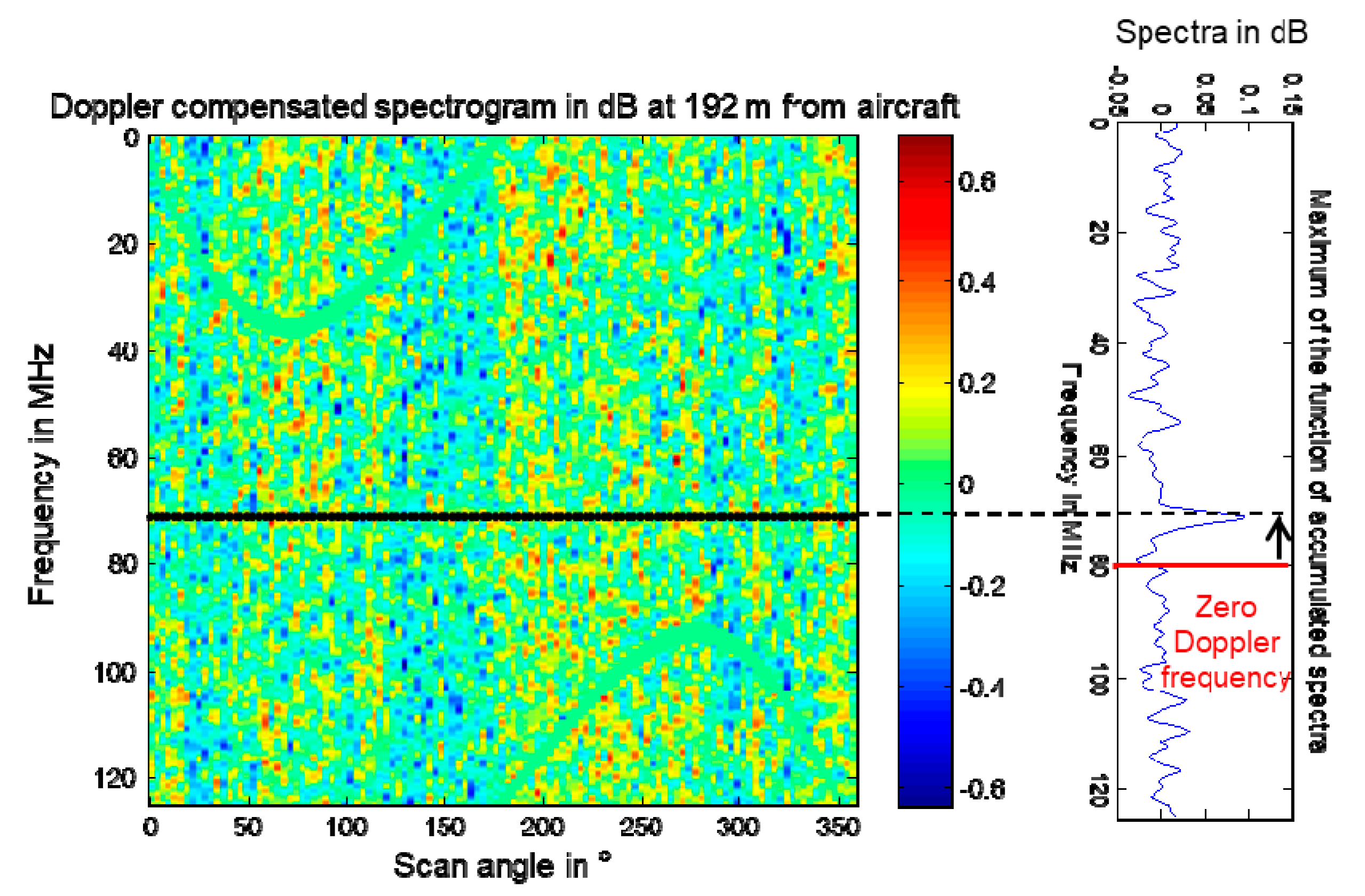
3.2. Flight Test Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bilbro, J.; Fichtl, G.; Fitzjarrald, D.; Krause, M.; Lee, R. Airborne Doppler lidar wind field measurements. Bull. Am. Meteorol. Soc. 1984, 65, 348–359. [Google Scholar] [CrossRef]
- Targ, R.; Kavaya, M.J.; Huffaker, R.M.; Bowles, R.L. Coherent lidar airborne windshear sensor: Performance evaluation. Appl. Opt. 1992, 30, 2013–2026. [Google Scholar] [CrossRef] [PubMed]
- Reitebuch, O.; Werner, C.; Leike, I.; Delville, P.; Flamant, P.H.; Cress, A.; Engelbart, D. Experimental Validation of Wind Profiling Performed by the Airborne 10-μm Heterodyne Doppler Lidar WIND. J. Atmos. Ocean. Technol. 2001, 18, 1331–1344. [Google Scholar] [CrossRef]
- Targ, R.; Hawley, J.G.; Steakley, B.C.; Ames, L.L. Airborne lidar wind detection at 2 µm. Proc. SPIE 1995, 2464, 109–115. [Google Scholar]
- Targ, R.; Steakley, B.C.; Hawley, J.G.; Ames, L.L.; Forney, P.; Swanson, D.; Stone, R.; Otto, R.G.; Zarifis, V.; Brockman, P.; et al. Coherent lidar airborne wind sensor II: Flight-test results at 2 and 10 μm. Appl. Opt. 1996, 35, 7117–7127. [Google Scholar] [CrossRef] [PubMed]
- Weissmann, M.; Busen, R.; Dörnbrack, A.; Rahm, S.; Reitebuch, O. Targeted observations with an airborne wind lidar. J. Atmos. Ocean. Technol. 2005, 22, 1706–1719. [Google Scholar] [CrossRef]
- Dolfi-Bouteyre, A.; Augere, B.; Besson, C.; Canat, G.; Fleury, D.; Gaudo, T.; Goular, D.; Lombard, L.; Planchat, C.; Valla, M.; et al. 1.5 μm all fiber pulsed lidar for wake vortex monitoring. In Proceedings of the 2008 Conference on Lasers and Electro-Optics and 2008 Conference on Quantum Electronics and Laser Science, San Jose, CA, USA, 4–9 May 2008. [Google Scholar]
- Kameyama, S.; Ando, T.; Asaka, K.; Hirano, Y.; Wadaka, S. Compact all-fiber pulsed coherent Doppler lidar system for wind sensing. Appl. Opt. 2007, 46, 1953–1962. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Zhu, X.; Diao, W.; Zhang, X.; Liu, Y.; Bi, D.; Chen, W. All-Fiber Airborne Coherent Doppler Lidar to Measure Wind Profiles. EPJ Web Conf. 2016, 119, 10002. [Google Scholar] [CrossRef]
- Dolfi-Bouteyre, A.; Canat, G.; Lombard, L.; Valla, M.; Durécu, A.; Besson, C. Long-range wind monitoring in real time with optimized coherent lidar. Opt. Eng. 2016, 56, 031217. [Google Scholar] [CrossRef]
- Canat, G.; Jetschke, S.; Lombard, L.; Unger, S.; Bourdon, P.; Kirchhof, J.; Dolfi, A.; Jolivet, V.; Vasseur, O. Multifilament-core fibers for high energy pulse amplification at 1.5 µm with excellent beam quality. Opt. Lett. 2008, 33, 2071–2073. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Diao, W.; Liu, Y.; Liu, J.; Hou, X.; Chen, W. Single-frequency polarized eye-safe all-fiber laser with peak power over kilowatt. Appl. Phys. B 2014, 115, 123–127. [Google Scholar] [CrossRef]
- Durécu, A.; Bourdon, P.; Gustave, F.; Jacqmin, H.; le Gouët, J.; Lombard, L. High Peak Power Single-Frequency Amplifier Based on a Er-Yb Doped Polarization Maintaining LMA Fiber. Opt. Soc. Am. 2018, 120. [Google Scholar] [CrossRef]
- Durécu, A.; Pureur, V.; Cariou, J.; le Gouët, J.; Lombard, L.; Bourdon, P. High Peak Power Single-Frequency ASE-reduced PM LMA fiber amplifier. In Proceedings of the European Conference on Lasers and Electro-Optics 2017, Munich, Germany, 25–29 June 2017. [Google Scholar]
- Smalikho, I. Techniques of wind vector estimation from data measured with a scanning coherent Doppler lidar. J. Atmos. Ocean. Technol. 2003, 20, 276–291. [Google Scholar] [CrossRef]
- Lombard, L.; Valla, M.; Planchat, C.; Goular, D.; Augère, B.; Bourdon, P.; Canat, G. Eyesafe coherent detection wind lidar based on a beam-combined pulsed laser source. Opt. Lett. 2015, 40, 1030–1033. [Google Scholar] [CrossRef] [PubMed]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Augere, B.; Valla, M.; Durécu, A.; Dolfi-Bouteyre, A.; Goular, D.; Gustave, F.; Planchat, C.; Fleury, D.; Huet, T.; Besson, C. Three-Dimensional Wind Measurements with the Fibered Airborne Coherent Doppler Wind Lidar LIVE. Atmosphere 2019, 10, 549. https://doi.org/10.3390/atmos10090549
Augere B, Valla M, Durécu A, Dolfi-Bouteyre A, Goular D, Gustave F, Planchat C, Fleury D, Huet T, Besson C. Three-Dimensional Wind Measurements with the Fibered Airborne Coherent Doppler Wind Lidar LIVE. Atmosphere. 2019; 10(9):549. https://doi.org/10.3390/atmos10090549
Chicago/Turabian StyleAugere, Beatrice, Matthieu Valla, Anne Durécu, Agnès Dolfi-Bouteyre, Didier Goular, François Gustave, Christophe Planchat, Didier Fleury, Thierry Huet, and Claudine Besson. 2019. "Three-Dimensional Wind Measurements with the Fibered Airborne Coherent Doppler Wind Lidar LIVE" Atmosphere 10, no. 9: 549. https://doi.org/10.3390/atmos10090549
APA StyleAugere, B., Valla, M., Durécu, A., Dolfi-Bouteyre, A., Goular, D., Gustave, F., Planchat, C., Fleury, D., Huet, T., & Besson, C. (2019). Three-Dimensional Wind Measurements with the Fibered Airborne Coherent Doppler Wind Lidar LIVE. Atmosphere, 10(9), 549. https://doi.org/10.3390/atmos10090549