Monitoring Tropospheric Gases with Small Unmanned Aerial Systems (sUAS) during the Second CLOUDMAP Flight Campaign



Abstract
1. Introduction
2. Experimental Methods
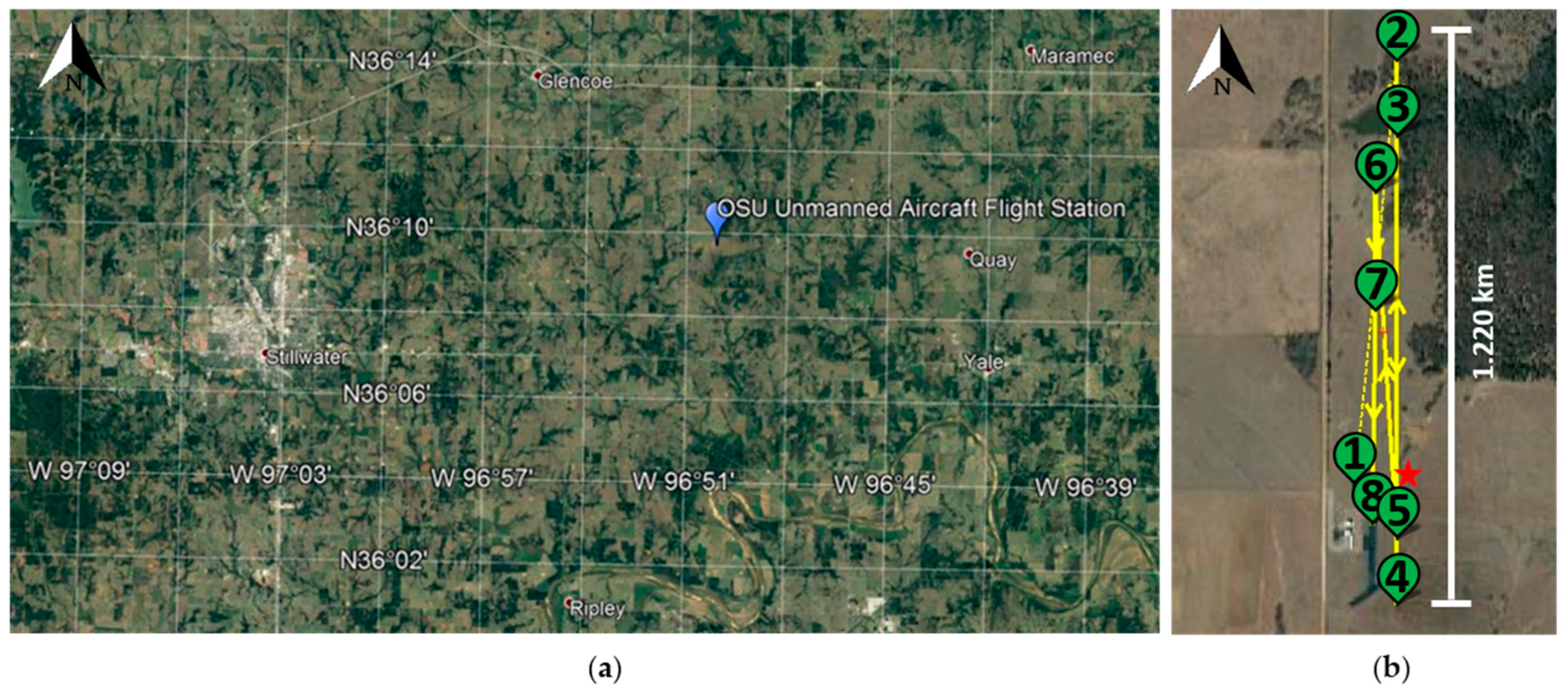
2.1. Description of Campaign Site
2.2. Description of Flight Patterns
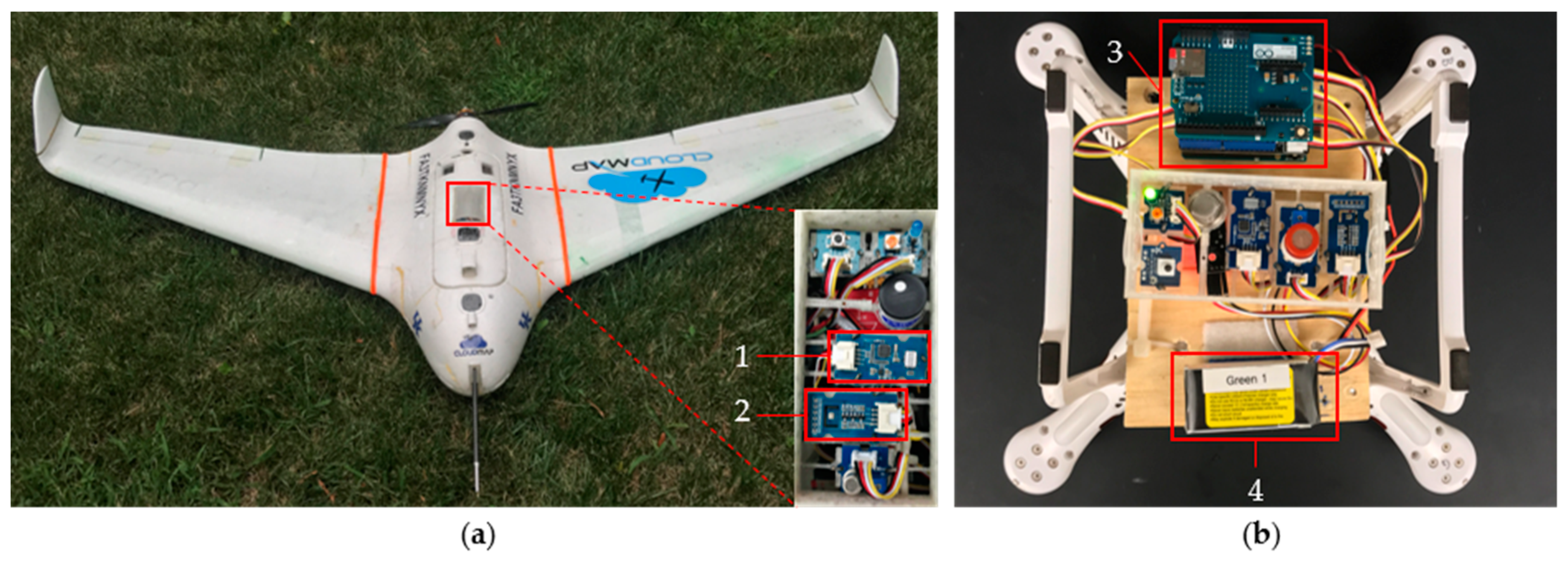
2.3. Gas Sensing Packages
2.4. Correction for Variable Air Speed and Solar Irradiation
2.5. Experiments for Data Collection
2.6. Data Analysis
3. Results and Discussion
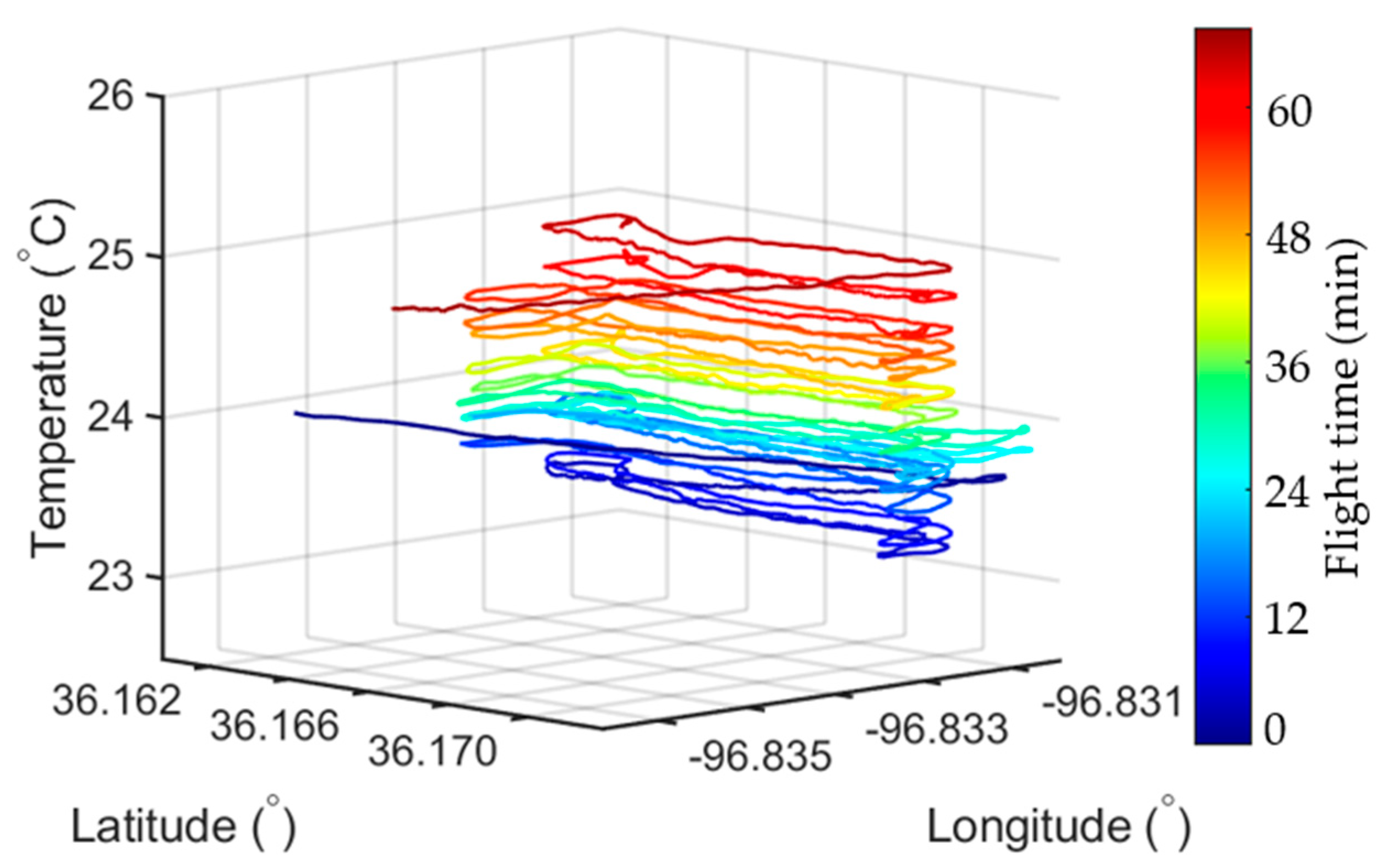
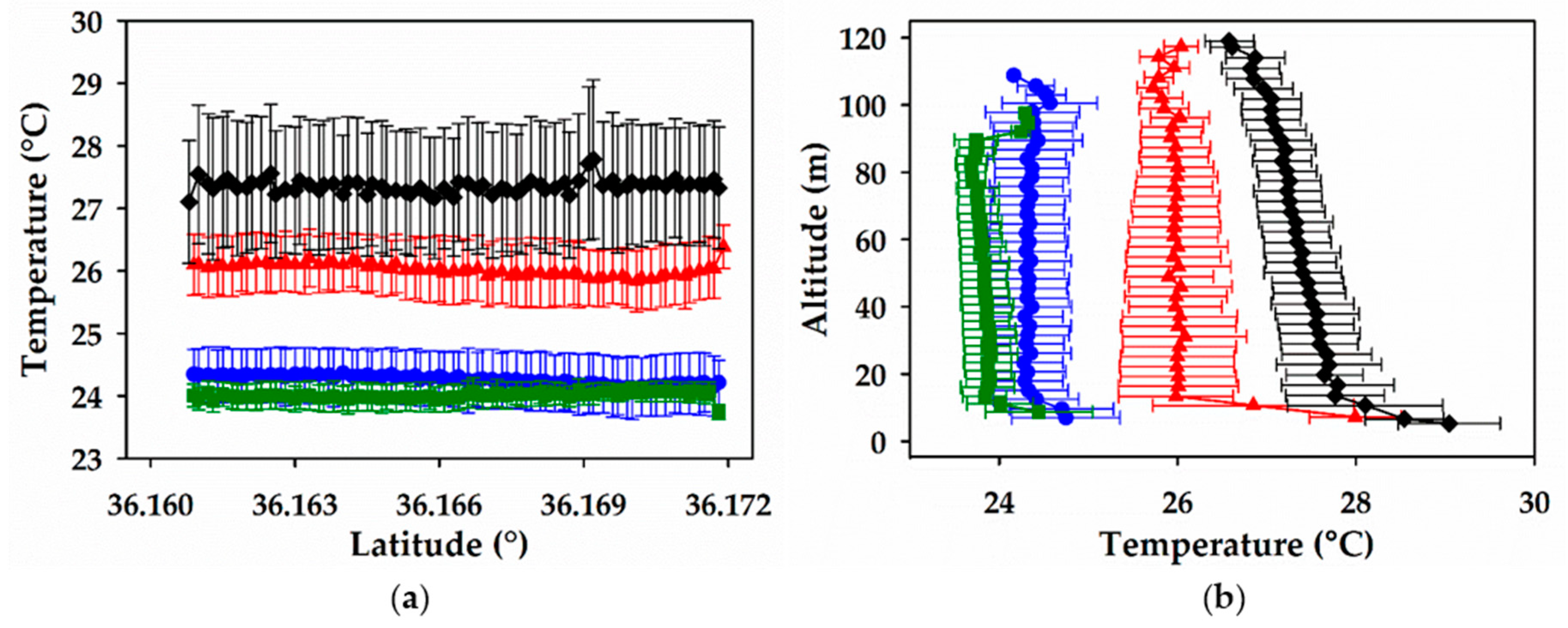
3.1. Physical Measurements
3.1.1. Temperature Profiles
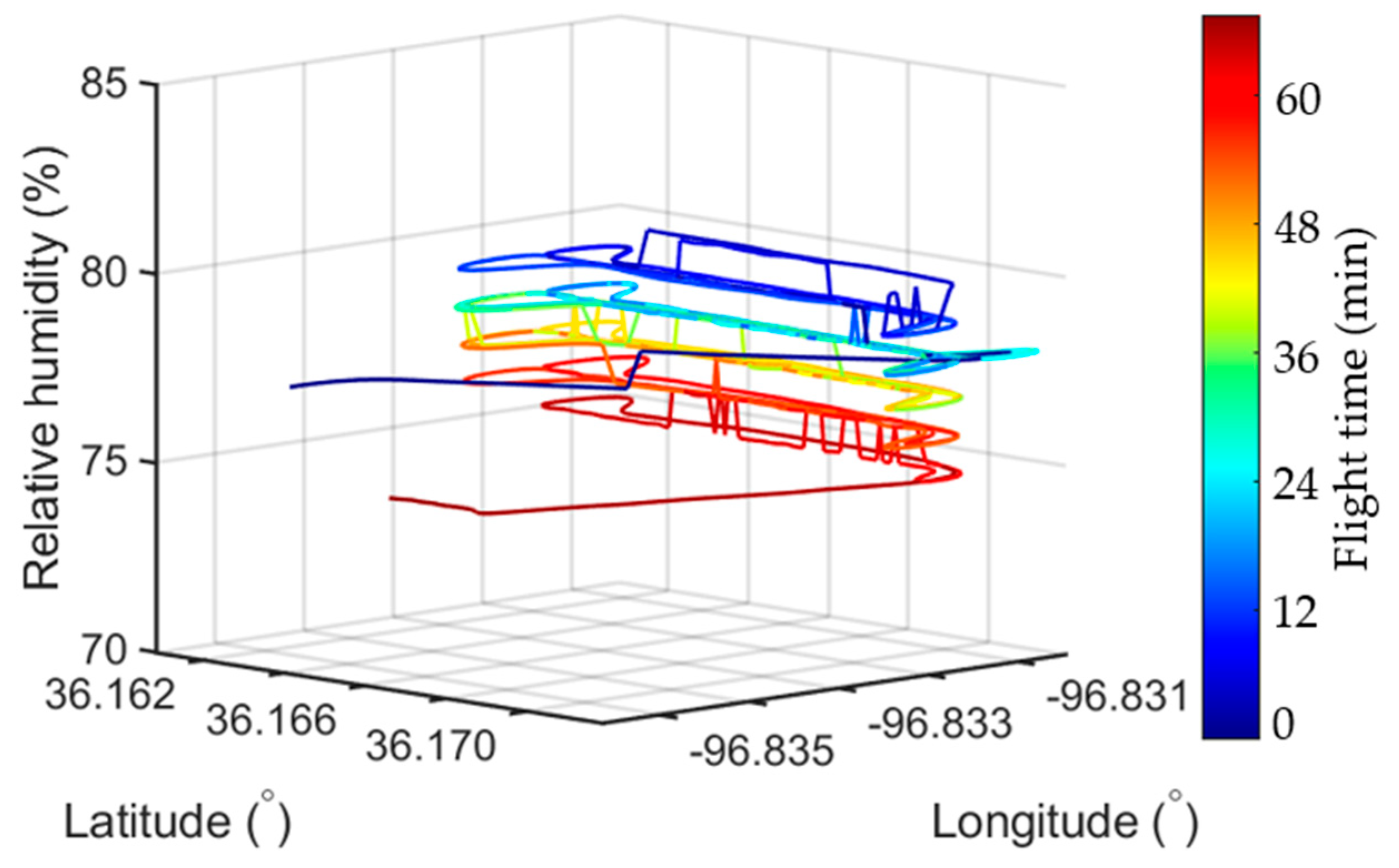
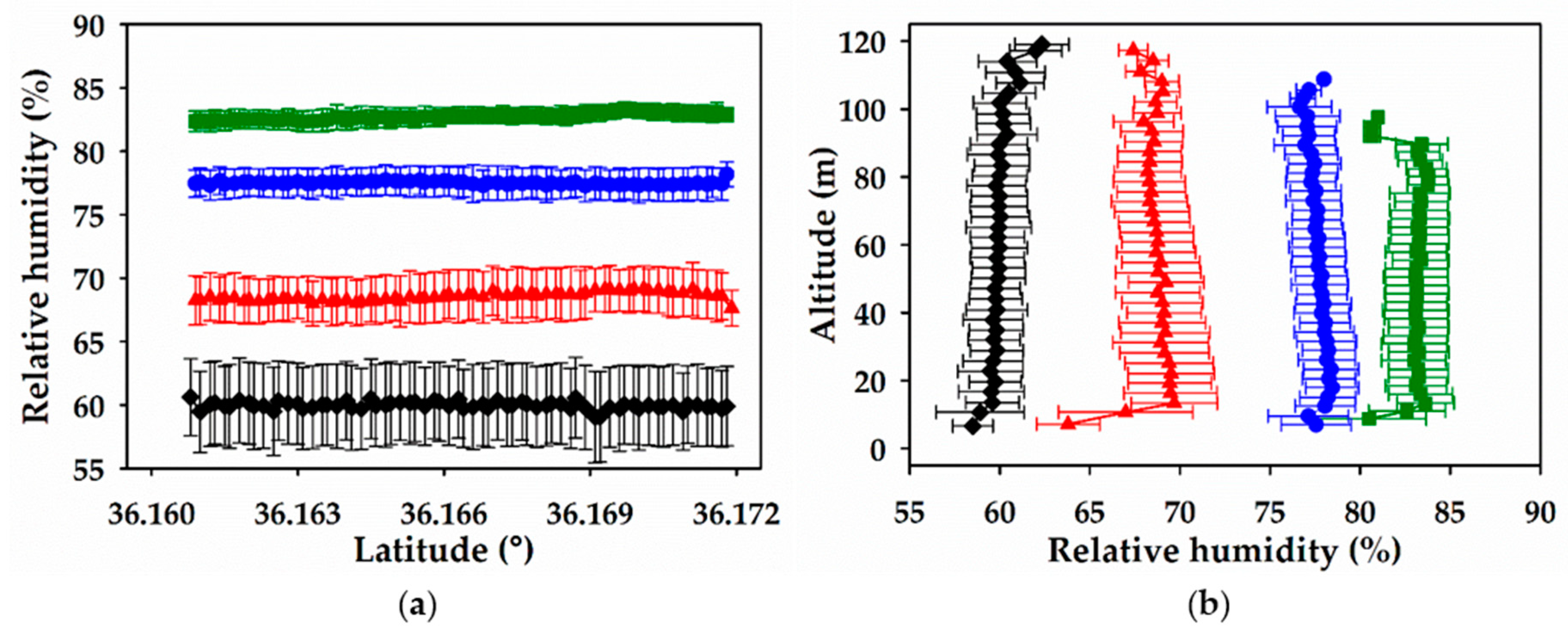
3.1.2. Relative Humidity Profiles
3.2. Trace Gas Measurements
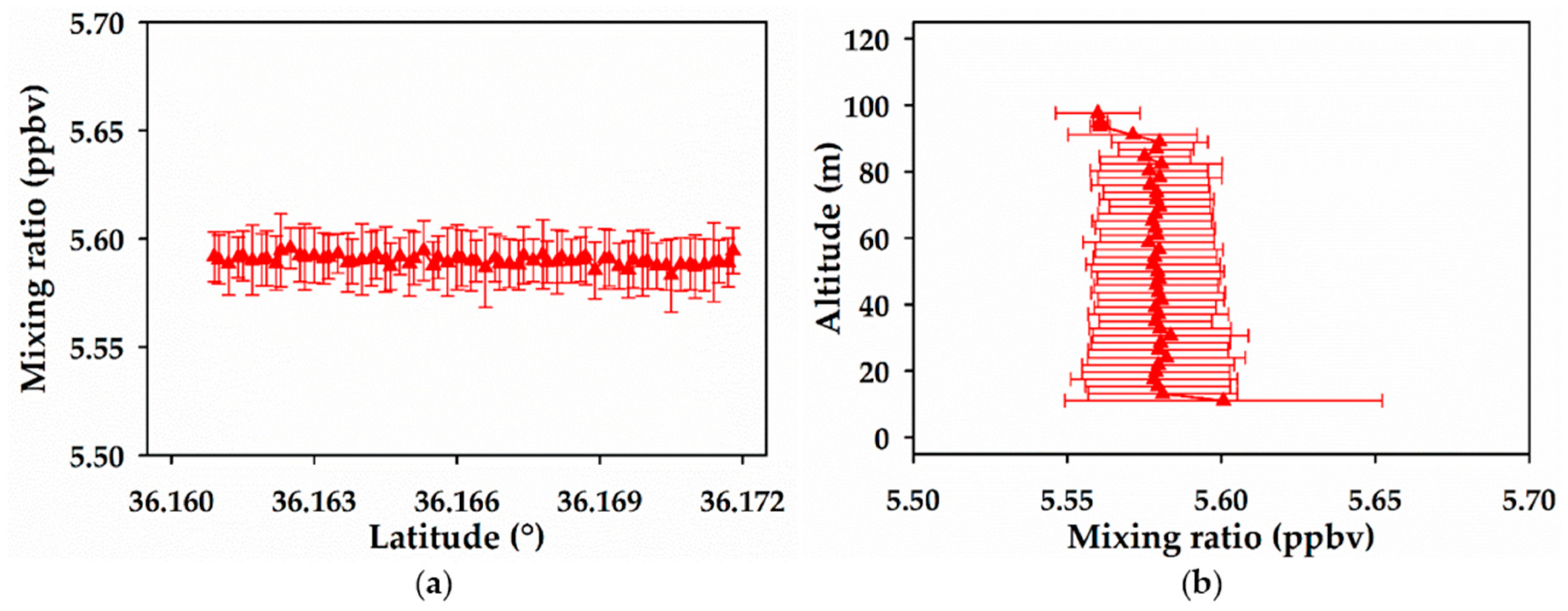
3.2.1. NH3 Profiles
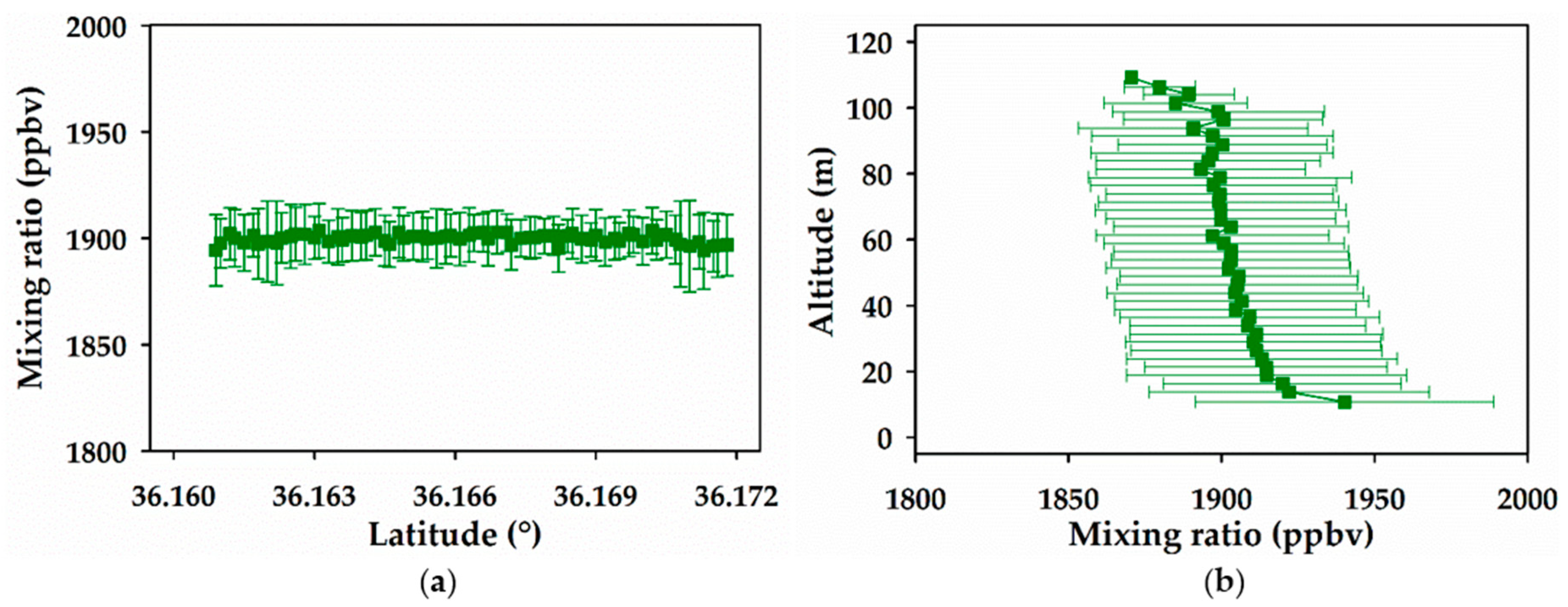
3.2.2. CH4 Profiles
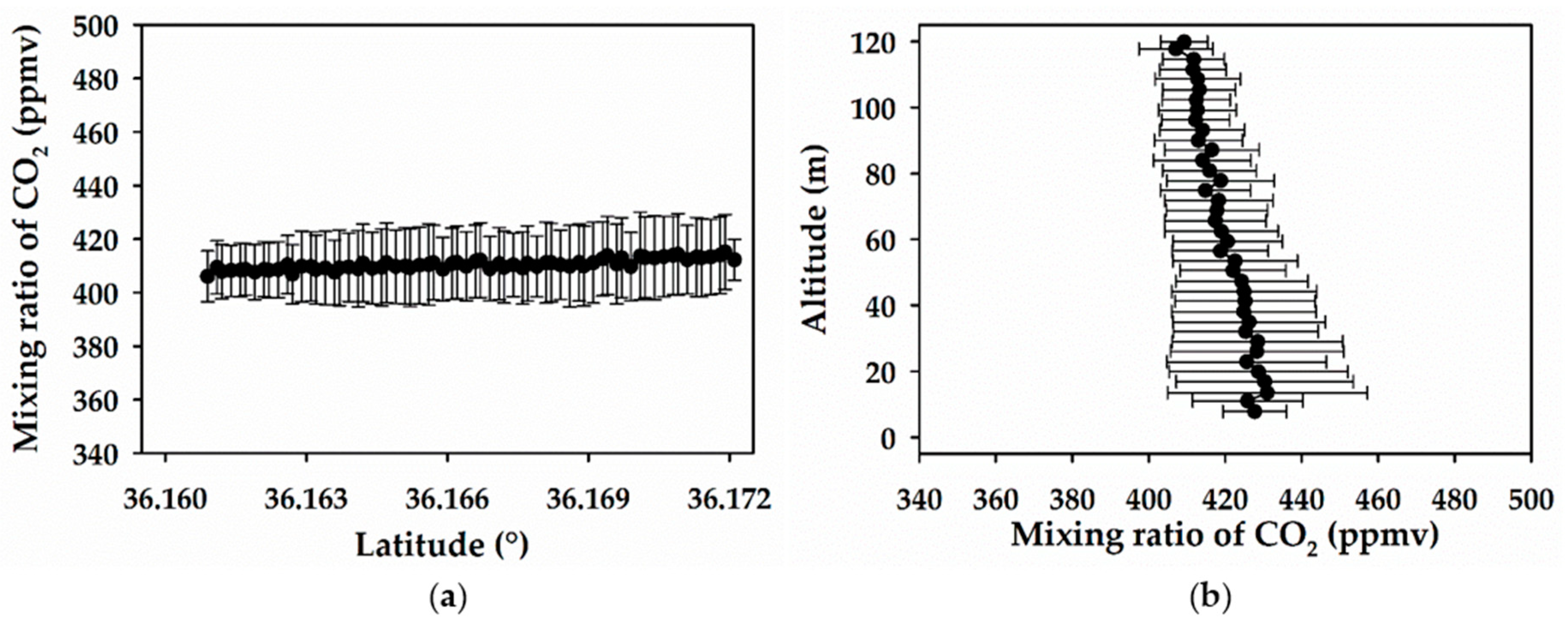
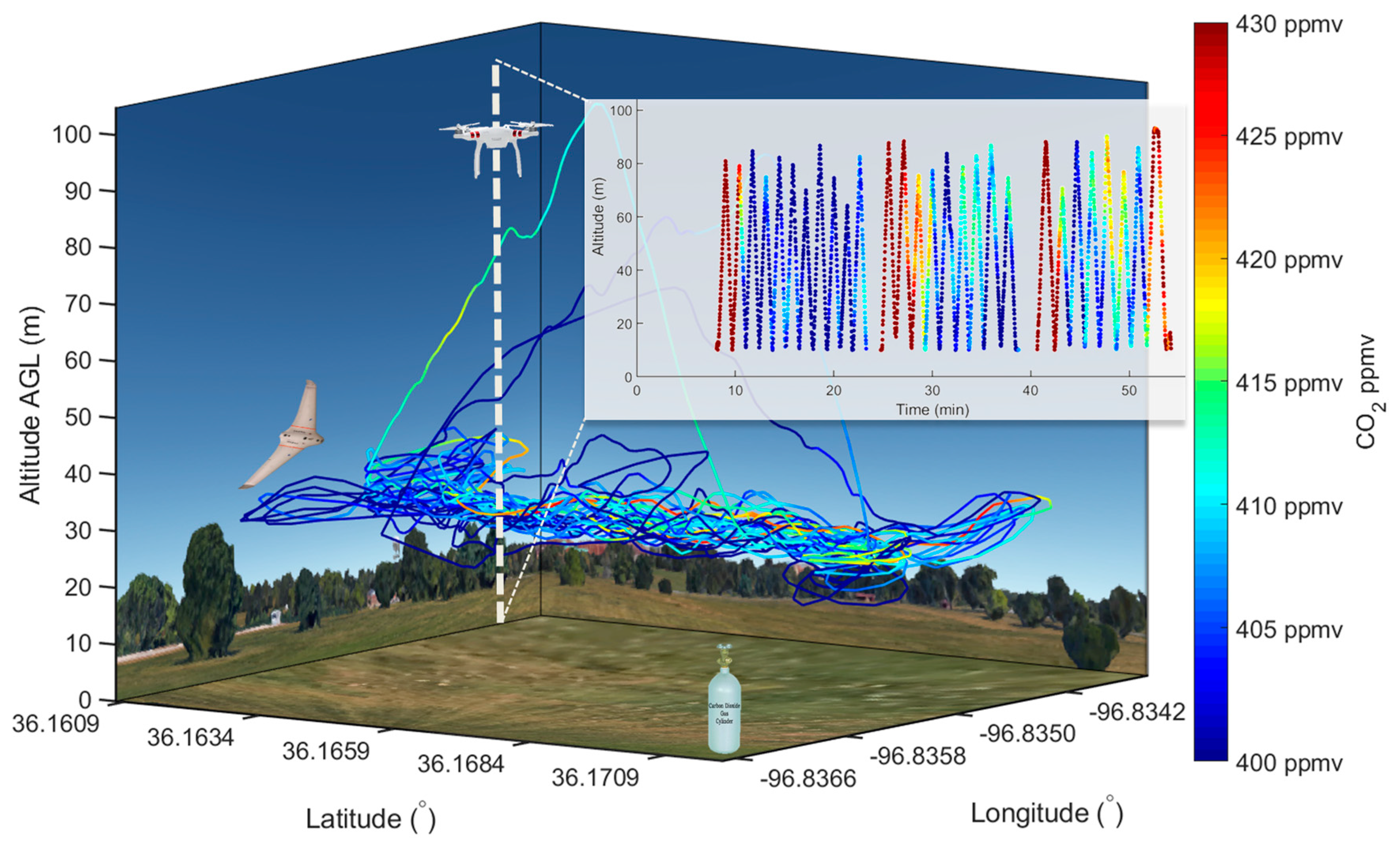
3.2.3. CO2 Profiles
3.2.4. Environmental Implications of sUAS for Monitoring Trace Gases
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gases | Operating Range (ppbv) | Accuracy (% of Measured Value) | Precision (ppbv) | Resolution (ppbv) |
|---|---|---|---|---|
| Methane | 1000–6000 | ±1.24% | 180 | 10 |
| Ammonia | 500.0–9040 | ±0.20% | 30 | 10 |
| Carbon dioxide | 80,000–1,622,000 | <±1% | <2000 | 1000 |
| Meteorological Variable | Accuracy | Precision | Response Time |
|---|---|---|---|
| Temperature | ±1.0 °C | ±0.005 °C | 0.5 s to 66% full signal |
| Pressure | ±1.0 hPa | ±0.002 hPa | - |
| Relative Humidity | ±3% | ±2% | 1 s to 63% of full signal |
References
- Gimeno, L. Grand challenges in atmospheric science. Front. Earth Sci. 2013, 1, 1–5. [Google Scholar] [CrossRef]
- Watson, A.Y.; Bates, R.R.; Kennedy, D. Mathematical Modeling of the Effect of Emission Sources on Atmospheric Pollutant Concentrations; National Academy of Science: Washington, DC, USA, 1988; Volume 1, p. 704. [Google Scholar]
- Witte, B.M.; Singler, R.F.; Bailey, S.C. Development of an unmanned aerial vehicle for the measurement of turbulence in the atmospheric boundary layer. Atmosphere 2017, 8, 195. [Google Scholar] [CrossRef]
- Rigby, M.; Prinn, R.G.; O’Doherty, S.; Miller, B.R.; Ivy, D.; Mühle, J.; Harth, C.M.; Salameh, P.K.; Arnold, T.; Weiss, R.F.; et al. Recent and future trends in synthetic greenhouse gas radiative forcing. Geophys. Res. Lett. 2014, 41, 2623–2630. [Google Scholar] [CrossRef]
- Köhler, P.; Nehrbass-Ahles, C.; Schmitt, J.; Stocker, T.F.; Fischer, H. A 156 kyr smoothed history of the atmospheric greenhouse gases CO2, CH4, and N2O and their radiative forcing. Earth Syst. Sci. Data 2017, 9, 363–387. [Google Scholar] [CrossRef]
- Pachauri, R.K.; Allen, M.R.; Barros, V.R.; Broome, J.; Cramer, W.; Christ, R.; Church, J.A.; Clarke, L.; Dahe, Q.; Dasgupta, P.; et al. Climate Change 2014: Synthesis Report. Contribution of Working Groups I, II and III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2014; p. 151. [Google Scholar]
- Snyder, C.W. Evolution of global temperature over the past two million years. Nature 2016, 538, 226–228. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Wang, X.; Fan, J.; Xiao, W.; Wang, Y. Effects of air pollution on hospital emergency room visits for respiratory diseases: Urban-suburban differences in Eastern China. Int. J. Environ. Res. Public Health 2016, 13, 341. [Google Scholar] [CrossRef] [PubMed]
- Dominici, F.; Peng, R.D.; Barr, C.D.; Bell, M.L. Protecting human health from air pollution: Shifting from a single-pollutant to a multi-pollutant approach. Epidemiology 2010, 21, 187–194. [Google Scholar] [CrossRef] [PubMed]
- Nhung, N.T.T.; Schindler, C.; Dien, T.M.; Probst-Hensch, N.; Perez, L.; Künzli, N. Acute effects of ambient air pollution on lower respiratory infections in Hanoi children: An eight-year time series study. Environ. Int. 2018, 110, 139–148. [Google Scholar] [CrossRef] [PubMed]
- Fischer, M. Airborne methane emission measurements for selected oil and gas facilities across California. Environ. Sci. Technol. 2017, 51, 12981–12987. [Google Scholar]
- Lavoie, T.N.; Shepson, P.B.; Gore, C.A.; Stirm, B.H.; Kaeser, R.; Wulle, B.; Lyon, D.; Rudek, J. Correction to assessing the methane emissions from natural gas-fired power plants and oil refineries. Environ. Sci. Technol. 2017, 51, 5856–5857. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Choi, Y.; Woo, J.; Kang, W.; Jung, J. Estimating and comparing greenhouse gas emissions with their uncertainties using different methods: A case study for an energy supply utility. J. Air Waste Manag. Assoc. 2014, 64, 1164–1173. [Google Scholar] [CrossRef]
- Schuyler, T.J.; Guzman, M.I. Unmanned aerial systems for monitoring trace tropospheric gases. Atmosphere 2017, 8, 206. [Google Scholar] [CrossRef]
- CLOUDMAP. Collaboration Leading Operational Unmanned Aerial System Development for Meteorology and Atmospheric Physics. Available online: http://www.cloud-map.org/ (accessed on 1 March 2018).
- Google Maps. Stillwater, OK, USA. Available online: https://tinyurl.com/y5euoj5o (accessed on 30 August 2017).
- Mesonet. Stillwater, OK Mesonet Daily Averages. Available online: http://www.mesonet.org/index.php/weather/daily_data_retrieval (accessed on 30 August 2017).
- Zhou, R.; Guzman, M.I. Photocatalytic reduction of fumarate to succinate on ZnS mineral surfaces. J. Phys. Chem. C 2016, 120, 7349–7357. [Google Scholar] [CrossRef]
- Eugene, A.J.; Guzman, M.I. Reactivity of ketyl and acetyl radicals from direct solar actinic photolysis of aqueous pyruvic acid. J. Phys. Chem. A 2017, 121, 2924–2935. [Google Scholar] [CrossRef] [PubMed]
- Hemingway, B.; Frazier, A.; Elbing, B.; Jacob, J. Vertical sampling scales for atmospheric boundary layer measurements from small unmanned aircraft systems (sUAS). Atmosphere 2017, 8, 176. [Google Scholar] [CrossRef]
- Barchyn, T.E.; Hugenholtz, C.H.; Myshak, S.; Bauer, J. A UAV-based system for detecting natural gas leaks. J. Unmanned Veh. Syst. 2018, 6, 18–30. [Google Scholar] [CrossRef]
- Ammonia Monitoring Network; National Atmospheric Deposition Program: Madison, WI, USA, 2016.
- Dlugokencky, E.J.; Lang, P.M.; Crotwell, A.M.; Mund, J.W.; Crotwell, M.J.; Thoning, K.W. Atmospheric Methane Dry Air Mole Fractions from the NOAA ESRL Carbon Cycle Cooperative Global Air Sampling Network; National Oceanic and Atmospheric Administration: Boulder, CO, USA, 2017; pp. 1983–2016.
- Tans, P.; Keeling, R. Trends in Atmospheric Carbon Dioxide at Mauna Loa; Earth System Research Laboratory, National Oceanic and Atmospheric Administration: Boulde, CO, USA, 2016.











| Total Exp. | Gas | Mean Mixing Ratio (ppbv, except for CO2 that is in ppmv) | ||||
|---|---|---|---|---|---|---|
| Skywalker X8 | DJI P3 | RV | ||||
| 50 m AGL | 50 m AGL | 90 m AGL | 15 m AGL | |||
| 2 | CH4 | 1899.8 (± 5.4) | 1898.5 (± 52.6) | 1855.2 (± 30.1) | 1914.1 (± 59.7) | 1898.4 |
| 2 | NH3 | 5.58 (± 0.01) | 5.58 (± 0.04) | 5.56 (± 0.04) | 5.59 (± 0.05) | 5.58 |
| 3 | CO2 | 409 (± 8) | 407 (± 20) | 405 (± 20) | 409 (± 20) | 407.71 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schuyler, T.J.; Bailey, S.C.C.; Guzman, M.I. Monitoring Tropospheric Gases with Small Unmanned Aerial Systems (sUAS) during the Second CLOUDMAP Flight Campaign. Atmosphere 2019, 10, 434. https://doi.org/10.3390/atmos10080434
Schuyler TJ, Bailey SCC, Guzman MI. Monitoring Tropospheric Gases with Small Unmanned Aerial Systems (sUAS) during the Second CLOUDMAP Flight Campaign. Atmosphere. 2019; 10(8):434. https://doi.org/10.3390/atmos10080434
Chicago/Turabian StyleSchuyler, Travis J., Sean C. C. Bailey, and Marcelo I. Guzman. 2019. "Monitoring Tropospheric Gases with Small Unmanned Aerial Systems (sUAS) during the Second CLOUDMAP Flight Campaign" Atmosphere 10, no. 8: 434. https://doi.org/10.3390/atmos10080434
APA StyleSchuyler, T. J., Bailey, S. C. C., & Guzman, M. I. (2019). Monitoring Tropospheric Gases with Small Unmanned Aerial Systems (sUAS) during the Second CLOUDMAP Flight Campaign. Atmosphere, 10(8), 434. https://doi.org/10.3390/atmos10080434