Sensing and Automation in Pruning of Apple Trees: A Review


Abstract
1. Introduction
2. Tree Training Systems
3. Pruning Strategies for Automated Pruning
4. Machine Vision Sensing for Branch Detection and 3D Reconstruction
4.1. Tree/Branch Detection/Reconstruction using Machine Vision System
4.2. Lidar Based Machine Vision System
4.3. Camera Based Machine Vision System
4.4. Branch Detection/Reconstruction for Automated Pruning
5. Automated Pruning System
6. Discussion: Challenges and Solutions
7. Conclusions
- Tree architecture is very critical for adopting automated orchard operations such as pruning and harvesting. Intensive tree orchard with narrow tree canopy or even 2D planar fruiting wall would be suitable for fully autonomous pruning system in the future.
- To develop robotic pruning, simple and quantified pruning rules are the essential of practical pruning strategies.
- Many studies have focused on the tree branch identification and reconstruction, however the accuracy and efficiency still needs to be improved for practical pruning operation.
- Robotic pruning technologies have been successfully investigated in some uniformed crops, such as grapevines. With the adoption of intensive tree architecture as well as the improvement of cutting end-effector, it is very promising to have a robotic pruning system for tree fruit crops.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- USDA-NASS. Noncitrus Fruits and Nuts: 2015 Summary. Available online: https://usda.mannlib.cornell.edu/usda/nass/NoncFruiNu//2010s/2016/NoncFruiNu-07-06-2016.pdf (accessed on 6 July 2016).
- Fennimore, S.A.; Doohan, D.J. Directions. Weed Technol. 2008, 22, 364–372. [Google Scholar] [CrossRef]
- Calvin, L.; Martin, P. The U.S. Produce Industry and Labor: Facing the Future in a Global Economy; Economic Research Services, USDA: Washington, DC, USA, 2010. [Google Scholar]
- Gonzalez-Barrera, A. More Mexicans Leaving Than Coming to the U.S. Pew Research Center. 2015. Available online: http://www.pewhispanic.org/2015/11/19/more-mexicans-leaving-than-coming-to-the-u-s/ (accessed on 19 November 2015).
- Noguchi, N.; Kise, M.; Ishii, K.; Terao, H. Field automation using robot tractor. In Automation Technology for Off-Road Equipment Proceedings of the 2002 Conference; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2002; p. 239. [Google Scholar]
- Kise, M.; Zhang, Q.; Más, F.R. A stereovision-based crop row detection method for tractor-automated guidance. Biosyst. Eng. 2005, 90, 357–367. [Google Scholar] [CrossRef]
- Zhang, Q.; Pierce, F.J. Agricultural Automation: Fundamentals and Practices; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Karkee, M.; Zhang, Q. Mechanization and automation technologies in specialty crop production. Resour. Mag. 2012, 19, 16–17. [Google Scholar]
- Lesser, K.; Harsh, R.M.; Seavert, C.; Lewis, K.; Baugher, T.; Schupp, J.; Auvil, T. Mobile platforms increase orchard management efficiency and profitability. In International Symposium on Application of Precision Agriculture for Fruits and Vegetables; International Society for Horticultural Science: Leuven, Belgium, 2008; Volume 824, pp. 361–364. [Google Scholar]
- Hamner, B.; Bergerman, M.; Singh, S. Autonomous orchard vehicles for specialty crops production. In Proceedings of the ASABE Annual International Meeting, Louisville, KY, USA, 7–10 August 2011; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2011; p. 1. [Google Scholar]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and systems for fruit detection and localization: A review. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- De Kleine, M.E.; Karkee, M. A semi-automated harvesting prototype for shaking fruit tree limbs. Trans. ASABE 2015, 58, 1461–1470. [Google Scholar]
- Davidson, J.R.; Silwal, A.; Hohimer, C.J.; Karkee, M.; Mo, C.; Zhang, Q. Proof-of-concept of a robotic apple harvester. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 634–639. [Google Scholar]
- He, L.; Baugher, T. Engineering opportunities for fruit growers. PA Fruit News 2018, 4, 10–12. [Google Scholar]
- Feucht, J.R.; Larsen, H. Training and pruning fruit trees. In Colorado State University Extension; Fact Sheet No. 7.003; Colorado State University: Fort Collins, CO, USA, 2009. [Google Scholar]
- WSU Tree Fruit. Pruning and Training Systems. Available online: http://treefruit.wsu.edu/orchard-management/pruning-and-training-systems/?print-view=true (accessed on 21 August 2018).
- Gallardo, K.; Taylor, M.; Hinman, H. 2009 Cost Estimates of Establishing and Producing Gala Apples in Washington; Washington State University: Washington, DC, USA, 2011; FS005E. [Google Scholar]
- Hansen, M. Fruiting Walls Suit Machinery. Good Fruit Grow. 2011, 62, 24–25. [Google Scholar]
- Penn State Extension. Fetzer, L. Orchard Pruning—Safety Tips. Available online: https://extension.psu.edu/orchard-pruning-safety-tips (accessed on 25 December 2017).
- Sansavini, S. Mechanical pruning of fruit trees. Symp. High Density Plant. 1976, 65, 183–198. [Google Scholar] [CrossRef]
- Ferree, D.C.; Lakso, A.N. Effect of selected dormant pruning techniques in a hedge-row apple orchard. J. Am. Soc. Hort. Sci. 1979, 104, 736–739. [Google Scholar]
- Ferree, D.C. Influence of various times of summer hedging on yield and growth of apple trees. Ohio Agric. Res. Dev. Cent. Res. Circ. 1984, 283, 33–37. [Google Scholar]
- Lehnert, R. Robotic Pruning. Available online: https://www.goodfruit.com/robotic-pruning/ (accessed on 1 November 2012).
- Dorigoni, A.; Lezzer, P.; Dallabetta, N.; Serra, S.; Musacchi, S. Bi-axis: An alternative to slender spindle for apple orchards. Acta Hortic. 2011, 903, 581–588. [Google Scholar] [CrossRef]
- Robinson, T.; Hoying, S.; Sazo, M.M.; DeMarree, A.; Dominguez, L. A Vision for Apple Orchard Systems of the Future. New York State Horticultural Society. Available online: http://nyshs.org/wp-content/uploads/2016/10/Pages-11-16-from-NYFQ-Book-Fall-2013-5.pdf (accessed on 3 November 2013).
- Hoying, S.; Robinson, T.; Fargione, M. The Tall Spindle Planting System. Available online: https://cpb-us-e1.wpmucdn.com/blogs.cornell.edu/dist/0/7265/files/2016/12/The-Tall-Spindle-Planting-System-2746zv0.pdf (accessed on 21 August 2018).
- Weber, M.S. The super spindle system. Acta Hortic. 1998, 513, 271–278. [Google Scholar] [CrossRef]
- Lehnert, R. Techniques and Benefits of a Fruit Wall. Available online: https://www.goodfruit.com/dorigoni/ (accessed on 28 January 2014).
- Warmund, M.R. The Vertical Axis System: A Training Method for Growing Apple Trees. University of Missouri Extension. Available online: https://extension2.missouri.edu/g6024 (accessed on 15 January 2018).
- Hoying, S.; Robinson, T.; Fargione, M. The Vertical Axis Planting System. Available online: https://cpb-us-e1.wpmucdn.com/blogs.cornell.edu/dist/0/7265/files/2016/12/The-Vertical-Axis-Planting-System-u3z03v.pdf (accessed on 21 August 2016).
- Anderson, T. Training Fruit Trees Using the Solaxe System. Available online: https://www.fredericknewspost.com/news/environment/training-fruit-trees-using-the-solaxe-system/article_141d613e-c3c6-5ee5-bb1d-e8c6f17d0db4.html (accessed on 17 September 2016).
- Dininny, S. Orchard Mechanization Gains Momentum. Available online: https://www.goodfruit.com/mechanization-momentum/ (accessed on 8 August 2017).
- DuPont, T.; Lewis, K. Robot Ready Tree Canopies. WSU. Tree Fruit. Available online: http://treefruit.wsu.edu/article/robot-ready-canopies/ (accessed on 2 February 2018).
- Willaume, M.; Lauri, P.É.; Sinoquet, H. Light interception in apple trees influenced by canopy architecture manipulation. Trees 2004, 18, 705–713. [Google Scholar] [CrossRef]
- Zhang, J.; Whiting, M.D.; Zhang, Q. Diurnal pattern in canopy light interception for tree fruit orchard trained to an upright fruiting offshoots (UFO) architecture. Biosyst. Eng. 2015, 129, 1–10. [Google Scholar] [CrossRef]
- Robinson, T.L.; Lakso, A.N.; Carpenter, S.G. Canopy development, yield, and fruit quality of empire and ’delicious’ apple trees grown in four orchard production systems for ten years. J. Am. Soc. Hortic. Sci. 1991, 116, 179–187. [Google Scholar]
- Hampson, C.R.; Quamme, H.A.; Brownlee, R.T. Canopy growth, yield, and fruit quality of ’Royal Gala’ apple trees grown for eight years in five tree training systems. Hortic. Sci. 2002, 37, 627–631. [Google Scholar]
- Whiting, M.D.; Lang, G.; Ophardt, D. Rootstock and training system affect sweet cherry growth, yield, and fruit quality. Hortic. Sci. 2005, 40, 582–586. [Google Scholar]
- Balmer, M.; Blanke, M. Developments in high density cherries in Germany. IV Int. Cherry Symp. 2001, 667, 273–278. [Google Scholar] [CrossRef]
- Lyons, D.J.; Heinemann, P.H.; Schupp, J.R.; Baugher, T.A.; Liu, J. Development of a selective automated blossom thinning system for peaches. Trans. ASABE 2015, 58, 1447–1457. [Google Scholar]
- Zhang, Z.; Heinemann, P.H.; Liu, J.; Schupp, J.R.; Baugher, T.A. Design and field test of a low-cost apple harvest-assist unit. Trans. ASABE 2016, 59, 1149–1156. [Google Scholar]
- He, L.; Fu, H.; Sun, D.; Karkee, M.; Zhang, Q. Shake-and-catch harvesting for fresh market apples in trellis-trained trees. Trans. ASABE 2017, 60, 353–360. [Google Scholar]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, integration, and field evaluation of a robotic apple harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar] [CrossRef]
- Karkee, M.; Adhikari, B.; Amatya, S.; Zhang, Q. Identification of pruning branches in tall spindle apple trees for automated pruning. Comput. Electron. Agric. 2014, 103, 127–135. [Google Scholar] [CrossRef]
- Robinson, T.L.; Domingurz, L.I.; Acosta, F. Pruning strategy affects fruit size, yield and biennial bearing of Gala and Honeycrisp Apples. N. Y. Fruit Q. 2014, 22, 27–32. [Google Scholar] [CrossRef]
- Schupp, J. Pruning by the Numbers. Available online: http://shaponline.org/wp-content/uploads/2012/03/Pruning-by-the-Numbers-Jim-Schupp.pdf (accessed on 15 March 2018).
- Schupp, J.R.; Winzeler, H.E.; Kon, T.M.; Marini, R.P.; Baugher, T.A.; Kime, L.F.; Schupp, M.A. A method for quantifying whole-tree pruning severity in mature tall spindle apple plantings. Hortic. Sci. 2017, 52, 1233–1240. [Google Scholar] [CrossRef]
- Zhang, X.; He, L.; Majeed, Y.; Karkee, M.; Whiting, M.D.; Zhang, Q. A Study of the influence of pruning strategy effect on vibrational harvesting of apples. In Proceedings of the 2017 ASABE Annual International Meeting, Spokane, Washington, DC, USA, 16–19 July 2017; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2017; p. 1. [Google Scholar]
- Ferree, D.C.; Rhodus, W.T. Apple tree performance with mechanical hedging or root pruning in intensive orchards. J. Am. Soc. Hortic. Sci. 1993, 118, 707–713. [Google Scholar]
- Wertheim, S.J. Pruning of slender spindle type trees. Acta Hortic. 1976, 65, 173–180. [Google Scholar] [CrossRef]
- He, L.; Fu, H.; Karkee, M.; Zhang, Q. Effect of fruit location on apple detachment with mechanical shaking. Biosyst. Eng. 2017, 157, 63–71. [Google Scholar] [CrossRef]
- Chen, Y.R.; Chao, K.; Kim, M.S. Machine vision technology for agricultural applications. Comput. Electron. Agric. 2002, 36, 173–191. [Google Scholar] [CrossRef]
- Davies, E.R. The application of machine vision to food and agriculture: A review. Imaging Sci. J. 2009, 57, 197–217. [Google Scholar] [CrossRef]
- McCarthy, C.L.; Hancock, N.H.; Raine, S.R. Applied machine vision of plants: A review with implications for field deployment in automated farming operations. Intell. Serv. Robot. 2010, 3, 209–217. [Google Scholar] [CrossRef]
- Radcliffe, J.; Cox, J.; Bulanon, D.M. Machine vision for orchard navigation. Comput. Ind. 2018, 98, 165–171. [Google Scholar] [CrossRef]
- Vázquez-Arellano, M.; Griepentrog, H.W.; Reiser, D.; Paraforos, D.S. 3-D imaging systems for agricultural applications—A review. Sensors 2016, 16, 618. [Google Scholar] [CrossRef] [PubMed]
- Brandtberg, T.; Warner, T.A.; Landenberger, R.E.; McGraw, J.B. Detection and analysis of individual leaf-off tree crowns in small footprint, high sampling density LIDAR data from the eastern deciduous forest in North America. Remote Sens. Environ. 2003, 85, 290–303. [Google Scholar] [CrossRef]
- Edson, C.; Wing, M.G. Airborne light detection and ranging (LIDAR) for individual tree stem location, height, and biomass measurements. Remote Sens. 2011, 3, 2494–2528. [Google Scholar] [CrossRef]
- Van Aardt, J.A.; Wynne, R.H.; Scrivani, J.A. Lidar-based mapping of forest volume and biomass by taxonomic group using structurally homogenous segments. Photogram. Eng. Remote Sens. 2008, 74, 1033–1044. [Google Scholar] [CrossRef]
- Amatya, S.; Karkee, M.; Zhang, Q.; Whiting, M.D. Automated detection of branch shaking locations for robotic cherry harvesting using machine vision. Robotics 2017, 6, 31. [Google Scholar] [CrossRef]
- Zhang, J.; He, L.; Karkee, M.; Zhang, Q.; Zhang, X.; Gao, Z. Branch detection with apple trees trained in fruiting wall architecture using stereo vision and regions-convolutional neural network (R-CNN). In Proceedings of the 2017 ASABE Annual International Meeting, Spokane, Washington, DC, USA, 16–19 July 2017; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2017; p. 1. [Google Scholar]
- Tagarakis, A.; Liakos, V.; Chatzinikos, T.; Koundouras, S.; Fountas, S.; Gemtos, T. Using laser scanner to map pruning wood in vineyards. Precis. Agric. 2013, 13, 633–639. [Google Scholar]
- Botterill, T.; Paulin, S.; Green, R.; Williams, S.; Lin, J.; Saxton, V.; Mills, S.; Chen, X.; Corbett-Davies, S. A robot system for pruning grape vines. J. Field Robot. 2017, 34, 1100–1122. [Google Scholar] [CrossRef]
- Corbett-Davies, S.; Botterill, T.; Green, R.; Saxton, V. An expert system for automatically pruning vines. In Proceedings of the 27th Conference on Image and Vision Computing, Dunedin, New Zealand, 26–28 November 2012; ACM: New York, NY, USA, 2012; pp. 55–60. [Google Scholar]
- Naugle, J.A.; Rehkugler, G.E.; Throop, J.A. Grapevine cordon following using digital image processing. Trans. ASAE 1989, 32, 309–0315. [Google Scholar] [CrossRef]
- Medeiros, H.; Kim, D.; Sun, J.; Seshadri, H.; Akbar, S.A.; Elfiky, N.M.; Park, J. Modeling dormant fruit trees for agricultural automation. J. Field Robot. 2017, 34, 1203–1224. [Google Scholar] [CrossRef]
- Chattopadhyay, S.; Akbar, S.A.; Elfiky, N.M.; Medeiros, H.; Kak, A. Measuring and modeling apple trees using time-of-flight data for automation of dormant pruning applications. In Proceedings of the Applications of Computer Vision 2016 IEEE Winter Conference, Lake Placid, NY, USA, 7–10 March 2016; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2016; pp. 1–9. [Google Scholar]
- Elfiky, N.M.; Akbar, S.A.; Sun, J.; Park, J.; Kak, A. Automation of dormant pruning in specialty crop production: An adaptive framework for automatic reconstruction and modeling of apple trees. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Boston, MA, USA, 7–12 June 2015; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2015; pp. 65–73. [Google Scholar]
- Tabb, A.; Medeiros, H. A robotic vision system to measure tree traits. arXiv, 2017; arXiv:1707.05368. [Google Scholar]
- Tabb, A.; Medeiros, H. Automatic segmentation of trees in dynamic outdoor environments. Comput. Ind. 2018, 98, 90–99. [Google Scholar] [CrossRef]
- Akbar, S.A.; Chattopadhyay, S.; Elfiky, N.M.; Kak, A. A Novel Benchmark RGBD Dataset for Dormant Apple Trees and its Application to Automatic Pruning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Boston, MA, USA, 8–10 June 2015; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2016; pp. 81–88. [Google Scholar]
- Akbar, S.A.; Elfiky, N.M.; Kak, A. A novel framework for modeling dormant apple trees using single depth image for robotic pruning application. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2016; pp. 5136–5142. [Google Scholar]
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. Simple Tree—An efficient open source tool to build tree models from TLS clouds. Forests 2015, 6, 4245–4294. [Google Scholar] [CrossRef]
- Li, R.; Bu, G.; Wang, P. An automatic tree skeleton extracting method based on point cloud of terrestrial laser scanner. Int. J. Opt. 2017. [Google Scholar] [CrossRef]
- Bucksch, A.; Fleck, S. Automated detection of branch dimensions in woody skeletons of fruit tree canopies. Photogram. Eng. Remote Sens. 2011, 77, 229–240. [Google Scholar] [CrossRef]
- Pla, F.; Juste, F.; Ferri, F.; Vicens, M. Colour segmentation based on a light reflection model to locate citrus fruits for robotic harvesting. Comput. Electron. Agric. 1993, 9, 53–70. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Ceres, R.; Pons, J.L. A vision system based on a laser range-finder applied to robotic fruit harvesting. Mach. Vis. Appl. 2000, 11, 321–329. [Google Scholar] [CrossRef]
- Hannan, M.W.; Burks, T.F.; Bulanon, D.M. A Machine Vision Algorithm Combining Adaptive Segmentation and Shape Analysis for Orange Fruit Detection. Agric. Eng. Int. 2018, 5, 1281. [Google Scholar]
- Silwal, A.; Karkee, M.; Zhang, Q. A hierarchical approach to apple identification for robotic harvesting. Trans. ASABE 2016, 59, 1079–1086. [Google Scholar]
- Nielsen, M.; Slaughter, D.C.; Gliever, C. Vision-based 3D peach tree reconstruction for automated blossom thinning. IEEE Trans. Ind. Inform. 2012, 8, 188–196. [Google Scholar] [CrossRef]
- Tan, P.; Zeng, G.; Wang, J.; Kang, S.B.; Quan, L. Image-based tree modeling. ACM Trans. Graph. 2007, 26, 87. [Google Scholar] [CrossRef]
- Cheng, Z.L.; Zhang, X.P.; Chen, B.Q. Simple reconstruction of tree branches from a single range image. J. Comput. Sci. Technol. 2007, 22, 846–858. [Google Scholar] [CrossRef]
- McFarlane, N.J.B.; Tisseyre, B.; Sinfort, C.; Tillett, R.D.; Sevila, F. Image analysis for pruning of long wood grape vines. J. Agric. Eng. Res. 1997, 66, 111–119. [Google Scholar] [CrossRef]
- Gao, M.; Lu, T.F. Image processing and analysis for autonomous grapevine pruning. In Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation 2006, Luoyang, China, 25–28 June 2006; Institute of Electrical and Electronics Engineers: Piscataway, New Jersey, USA, 2006; pp. 922–927. [Google Scholar]
- Hosseini, S.M.; Jafari, A. Designing an algorithm for pruning grapevine based on 3D image processing. Iran. J. Biosyst. Eng. 2017, 48, 289–297. [Google Scholar]
- Karkee, M.; Adhikari, B. A method for three-dimensional reconstruction of apple trees for automated pruning. Trans. ASABE 2015, 58, 565–574. [Google Scholar]
- Tabb, A. Three-dimensional reconstruction of fruit trees by a shape from silhouette method. In Proceedings of the ASABE Annual International Meeting 2009, Reno, Nevada, 21–24 June 2009; Paper No. 096138. ASABE: St. Joseph, MI, USA, 2009. [Google Scholar]
- Martí, B.V.; González, E.F. The influence of mechanical pruning in cost reduction, production of fruit, and biomass waste in citrus orchards. Appl. Eng. Agric. 2010, 26, 531–540. [Google Scholar] [CrossRef]
- Dias, A.B.; Patrocinio, S.; Pereira, S.; Brites, T.; Pita, V.; Mota Barroso, J.M. Evaluation of the use of a disc-saw machine in winter pruning ‘Rocha’ pears orchard—An account of five years. XII Int. Pear Symp. 2014, 1094, 281–288. [Google Scholar] [CrossRef]
- Gautz, L.D.; Bittenbender, H.C.; Mauri, S. Effect of mechanized pruning on coffee regrowth and fruit maturity timing. In Proceedings of the ASAE Annual Meeting, Chicago, IL, USA, 28–31 July 2002; Paper No. 021110. ASAE: Washington, DC, USA, 2002. [Google Scholar]
- Morris, J.R.; Cawthon, D.L.; Fleming, J.W. Effect of mechanical pruning on yield and quality of ‘Concord’ grapes. Ark. Farm. Res. 1975, 24, 12. [Google Scholar]
- Bates, T.; Morris, J. Mechanical cane pruning and crop adjustment decreases labor costs and maintains fruit quality in New York ‘Concord’ grape production. Hortic. Technol. 2009, 19, 247–253. [Google Scholar]
- Poni, S.; Tombesi, S.; Palliotti, A.; Ughini, V.; Gatti, M. Mechanical winter pruning of grapevine: Physiological bases and applications. Sci. Hortic. 2016, 204, 88–98. [Google Scholar] [CrossRef]
- Cline, H. Mechanical Vine Pruning Dramatically Reduces Costs. Western FarmPress. Available online: https://www.westernfarmpress.com/mechanical-vine-pruning-dramatically-reduces-costs (accessed on 1 February 2002).
- Guimond, C.M.; Lang, G.A.; Andrews, P.K. Timing and severity of summer pruning affects flower initiation and shoot regrowth in sweet cherry. Hortic. Sci. 1998, 33, 647–649. [Google Scholar]
- Albarracín, V.; Hall, A.J.; Searles, P.S.; Rousseaux, M.C. Responses of vegetative growth and fruit yield to winter and summer mechanical pruning in olive trees. Sci. Hortic. 2017, 225, 185–194. [Google Scholar] [CrossRef]
- Moore, P.W. Mechanical pruning for citrus. Calif. Agric. 1958, November. 7–9. [Google Scholar]
- Vivaldi, G.A.; Strippoli, G.; Pascuzzi, S.; Stellacci, A.M.; Camposeo, S. Olive genotypes cultivated in an adult high-density orchard respond differently to canopy restraining by mechanical and manual pruning. Sci. Hortic. 2015, 192, 391–399. [Google Scholar] [CrossRef]
- Moore-Gough, C.; Gough, R.E. Pruning Fruit Trees in Montana. Available online: http://msuextension.org/publications/YardandGarden/MT199215AG.pdf (accessed on 10 March 2007).
- Jensen, F.; Christensen, L.; Beede, R.; Leavitt, G. Effects of mechanical pruning on grapes. Calif. Agric. 1980, 34, 33–34. [Google Scholar]
- Sevilla, F. A robot to prune the grapevine. In Proceedings of the Agri-Mation 1 Conference and Exposition, Chicago, IL, USA, 25–28 February 1985. [Google Scholar]
- Ochs, E.S.; Gunkel, W.W. Robotic Grape Pruner Field Performance Simulation. In Proceedings of the Annual International Meeting, Chicago, IL, USA, 12–17 December 1993; No. 933528. ASAE: Washington, DC, USA, 1993. [Google Scholar]
- Lee, M.F.; Gunkel, W.W.; Throop, J.A. A Digital Regulator and Tracking Controller Design for an Electrohydraulic Robotic Grape Pruner. In Proceedings of the 5th International Conference on Computers in Agriculture, Orlando, FL, USA, 6–9 February 1994; ACM: New York, NY, USA, 1994; pp. 23–28. [Google Scholar]
- Kondo, N.; Shibano, Y.; Mohri, K.; Monta, M. Basic studies on robot to work in vineyard 2: Discriminating, position detecting and harvesting experiments using a visual sensor. J. Jpn. Soc. Agric. Mach. 1994, 56, 45–53. [Google Scholar]
- Kondo, N.; Shibano, Y.; Mohri, K.; Monta, M. Basic studies on robot to work in vineyard 1: Manipulator and harvesting hand. J. Jpn. Soc. Agric. Mach. 1993, 55, 85–94. [Google Scholar]
- Koselka, T. Intelligent Robotic Grapevine Pruning. Vitculture and Enology Extension News, Washington State University. Available online: http://wine.wsu.edu/wp-content/uploads/sites/66/2010/07/2012-Fall-FINAL.pdf (accessed on 12 March 2018).
- Holz, D.; Ichim, A.E.; Tombari, F.; Rusu, R.B.; Behnke, S. Registration with the point cloud library: A modular framework for aligning in 3-D. IEEE Robot. Autom. Mag. 2015, 22, 110–124. [Google Scholar] [CrossRef]
- Newcombe, R.A.; Fox, D.; Seitz, S.M. Dynamicfusion: Reconstruction and tracking of non-rigid scenes in real-time. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2015, Boston, MA, USA, 7–12 June 2015; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2015; pp. 343–352. [Google Scholar]
- Nguyen, T.T.; Vandevoorde, K.; Kayacan, E.; De Baerdemaeker, J.; Saeys, W. Apple detection algorithm for robotic harvesting using a RGB-D camera. In Proceedings of the International Conference of Agricultural Engineering, Zurich, Switzerland, 6–10 July 2014; Agricultural Engineering: Zurich, Switzerland, 2014. [Google Scholar]
- Zhu, D.; Chen, B.; Yang, Y.; Lianxi, H.; Yang, M.; Qiao, Y. Method of haze-removal based on dark channel prior in visual system of apple harvest robot. Trans. Chin. Soc. Agric. Eng. 2016, 32, 151–158. [Google Scholar]
- Ye, Y.; Wang, Z.; Jones, D.; He, L.; Taylor, M.E.; Hollinger, G.A.; Zhang, Q. Bin-dog: A robotic platform for bin management in orchards. Robotics 2017, 6, 12. [Google Scholar] [CrossRef]
- Barth, R.; Hemming, J.; van Henten, E.J. Design of an eye-in-hand sensing and servo control framework for harvesting robotics in dense vegetation. Biosyst. Eng. 2016, 146, 71–84. [Google Scholar] [CrossRef]
- Korayem, M.H.; Shafei, A.M.; Seidi, E. Symbolic derivation of governing equations for dual-arm mobile manipulators used in fruit-picking and the pruning of tall trees. Comput. Electron. Agric. 2014, 105, 95–102. [Google Scholar] [CrossRef]
- Megalingam, R.K.; Vignesh, N.; Sivanantham, V.; Elamon, N.; Sharathkumar, M.S.; Rajith, V. Low cost robotic arm design for pruning and fruit harvesting in developing nations. In Proceedings of the 10th International Conference on Intelligent Systems and Control (ISCO) 2016, Coimbatore, India, 7–8 January 2016; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar]
- Krissian, K.; Malandain, G.; Ayache, N.; Vaillant, R.; Trousset, Y. Model-based detection of tubular structures in 3d images. Comput. Vis. Image Underst. 2000, 80, 130–171. [Google Scholar] [CrossRef]
- Chuang, J.H.; Tsai, C.H.; Ko, M.C. Skeletonisation of three-dimensional object using generalized potential field. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1241–1251. [Google Scholar]
- Duan, Y.; Yang, L.; Qin, H.; Samaras, D. Shape reconstruction from 3D and 2D data using PDE-based deformable surfaces. In Proceedings of the European Conference on Computer Vision, Prague, Czech Republic, 11–14 May 2004; Springer: Berlin, Germany, 2004; pp. 238–251. [Google Scholar]
- He, L. New concept of mechanical/robotic pruning end-effector for fruit trees. Unpublished document. 2018. in preparation. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Training Systems | Specifications | Pruning Complexity | References |
|---|---|---|---|
| Bi-axis | - Most in Italy and new to Washington - Two-stem tree architecture - High density and trellis required - Pre-formed and split-branch tree required | - Short shoot length reduced pruning mass - Well adopted for mechanical harvesting | [24,25] |
| Tall spindle | - High density - Most common system in Eastern north America - One leader with narrow canopy - No permanent branches | - No pruning of leader - Limb renewal pruning is used - Summer hedging applicable | [25,26] |
| Super spindle | - Super high density and trellis required - Low operation cost | - No pruning of leader - Limb renewal pruning is used - Summer hedging applicable | [25,27] |
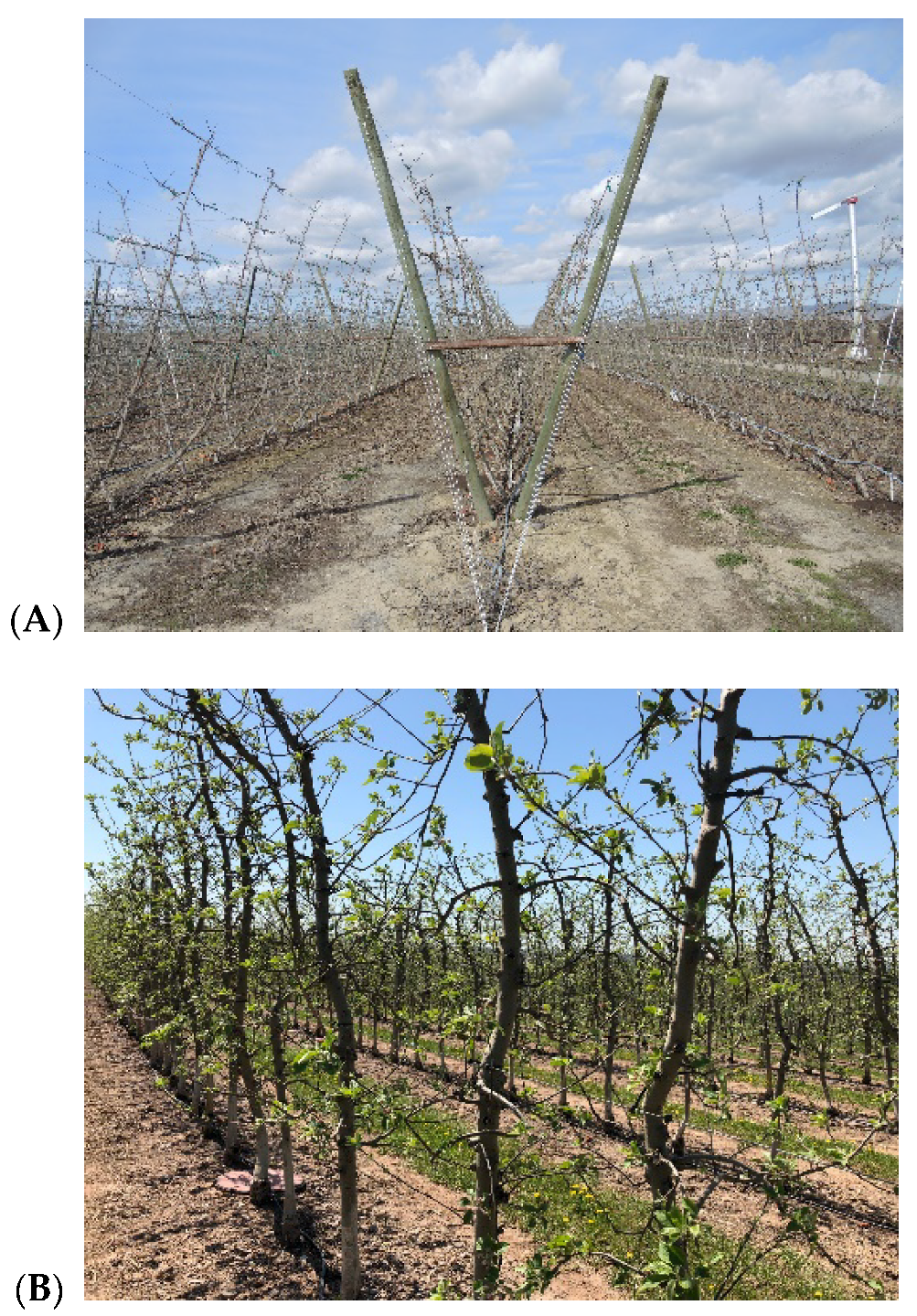
| V-trellis/Vertical fruiting wall | - Fruiting wall (2D) - Common system in Washington - Horizontal branches on trellis wire - Designed for precision pruning | - High accessibility of branches - Compatible for robotic pruning | [25,28] |
| Vertical axis | - Narrow pyramidal shape - Central leader with support post - Support by a trellis | - Lateral branches are renewed periodically | [29,30] |
| Solaxe | - Common in south France, part of Spain and Chile - Extensive limb bending - Central leader | - Removal of shoot close to trunk and other large shoots - Limit pruning is required after properly training in first few years | [25,31] |
| Tree Training System | Pruning Rules | Technical Difficulties for Automated Pruning | References |
|---|---|---|---|
| Tall spindle | - Limb renewal pruning: elimination of large branches | - Obtain location of each branch - Identity base diameter of each individual branches - Machine Accessibility | [45,47] |
| Tall spindle | - Certain branch length and spacing | - Measure the length of each branch - Determine the density of the branches | [44] |
| Super/tall Spindle | - Branch simplification pruning: removing lateral secondary branches | - Identify the diameter and length of each secondary branches | [45] |
| Vertical/V-trellis fruiting wall | - Keep secondary branches in certain length | - Identify the diameter and length of each secondary branches | [48] |
| Trellis training central leader | - Hedging and topping | - Identify tree structure - Determine the cutting location | [49] |
| Slender spindle | - Remove tree top - Remove unwanted shoot | - Identify tree structure - Determine the cutting location | [50] |
| Hedgerow | - Hedging and topping | - Identify tree structure - Determine the cutting location | [20] |
| Application | Sensors | Technique Difficulties | References |
|---|---|---|---|
| Forest tree inventory | Airborne laser scanner | - Relatively low accuracy - Difficult to detect small trees | [57,58,59] |
| Mechanical harvesting | 3D camera (ToF *)Kinect v2 | - Leaves/fruits may block the branches - Affected by the direct sunlight | [60,61] |
| Robotic grapevine pruning | Laser scanner (ToF) | - Only for wood estimation - Efficacy needs to be improved | [62] |
| 3 Grey Grasshopper2 color cameras | - Moving canes are not modeled - Incorrect 3D structure around vine head - Requires stops at each plant | [63,64] | |
| RGB camera | - Not for precise pruning - Not suit for big distance variation of cane base | [65] | |
| Robotic fruit tree pruning | Laser scanner/ToF | - Human intervention is necessary for part of registration | [66] |
| 3D camera (CamCube 3.0 **) | - Overlap branch removal rate is about 70% - More pruning criteria will be considered | [44] | |
| Kinect v2 | - Color information is required to improve performance - Separate two adjacent/close trees | [67,68] | |
| RGB-D camera(ToF) | - The operation of 3D reconstruction is offline - The speed is low | [69,70,71,72] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, L.; Schupp, J. Sensing and Automation in Pruning of Apple Trees: A Review. Agronomy 2018, 8, 211. https://doi.org/10.3390/agronomy8100211
He L, Schupp J. Sensing and Automation in Pruning of Apple Trees: A Review. Agronomy. 2018; 8(10):211. https://doi.org/10.3390/agronomy8100211
Chicago/Turabian StyleHe, Long, and James Schupp. 2018. "Sensing and Automation in Pruning of Apple Trees: A Review" Agronomy 8, no. 10: 211. https://doi.org/10.3390/agronomy8100211
APA StyleHe, L., & Schupp, J. (2018). Sensing and Automation in Pruning of Apple Trees: A Review. Agronomy, 8(10), 211. https://doi.org/10.3390/agronomy8100211