
The Development of an Air Suction Precision Seed-Metering Device for Rice Plot Breeding

 ,
,
Abstract
1. Introduction
2. Materials and Methods
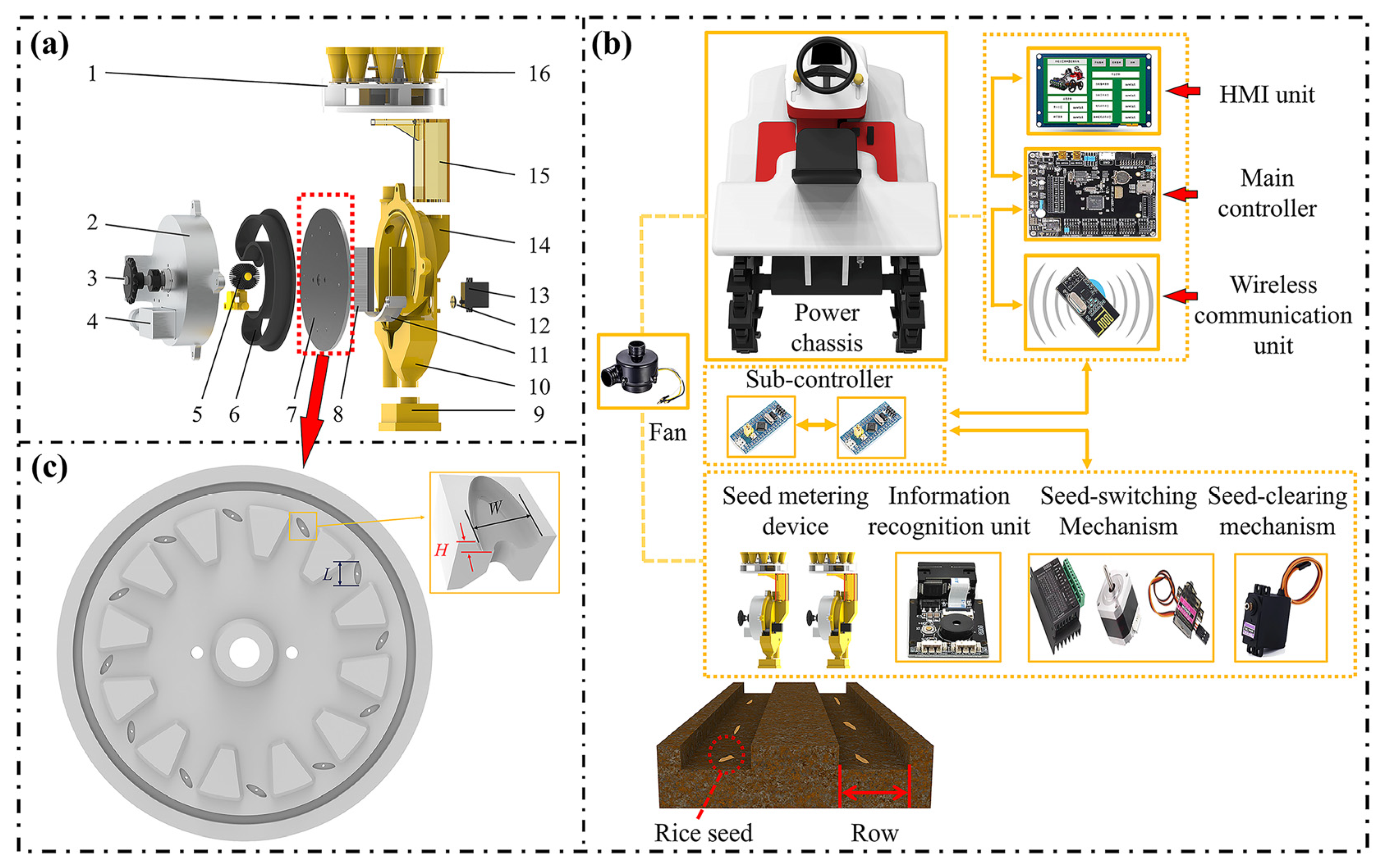
2.1. Overall Structure of the Seed-Metering Device
2.1.1. Control Scheme for the Seed-Switching and Clearing System
2.1.2. Working Principle
2.2. Mechanical Structure Design of the Seed-Metering Unit
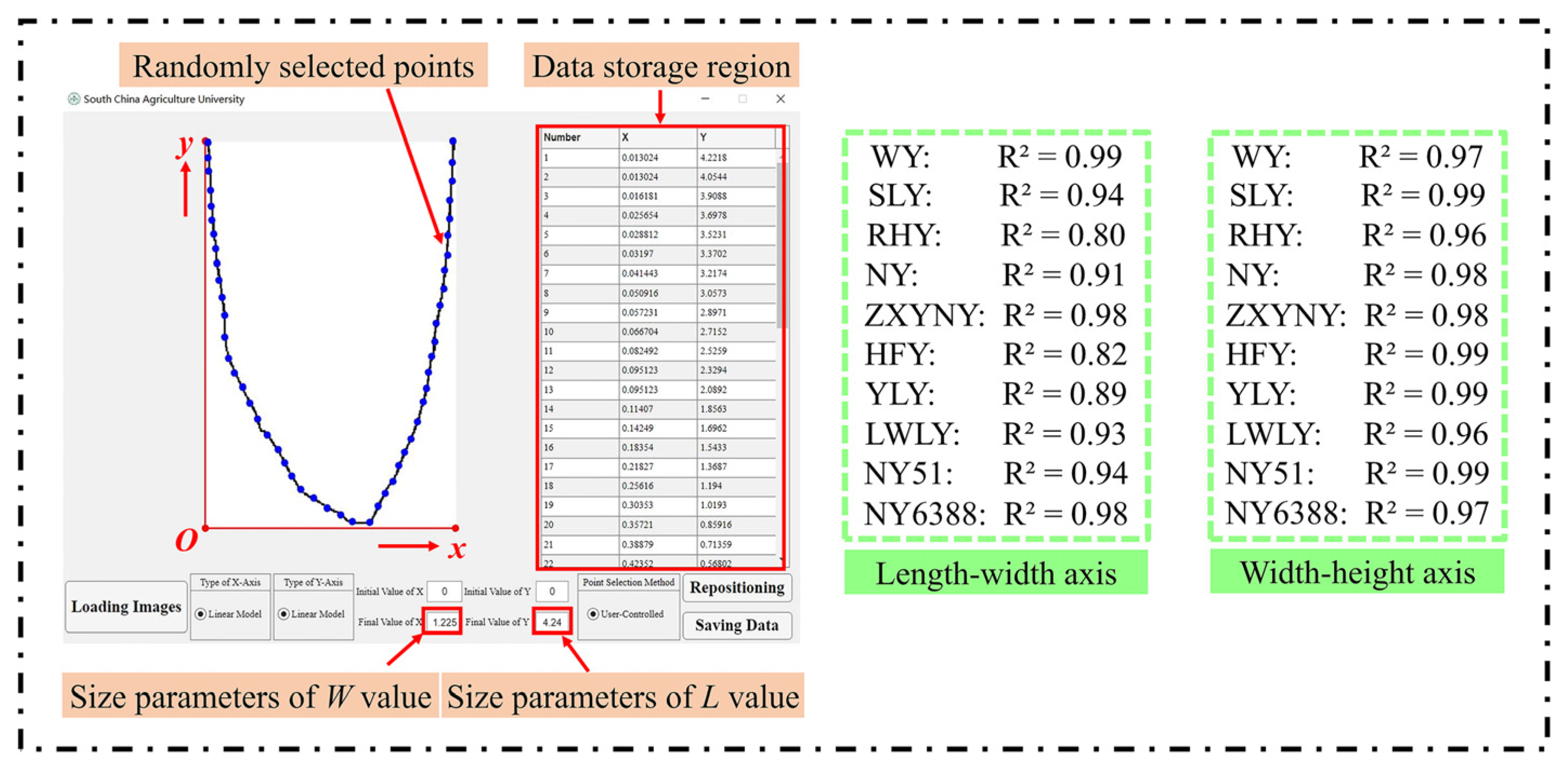
2.2.1. Structural Design of the Seed-Metering Disc
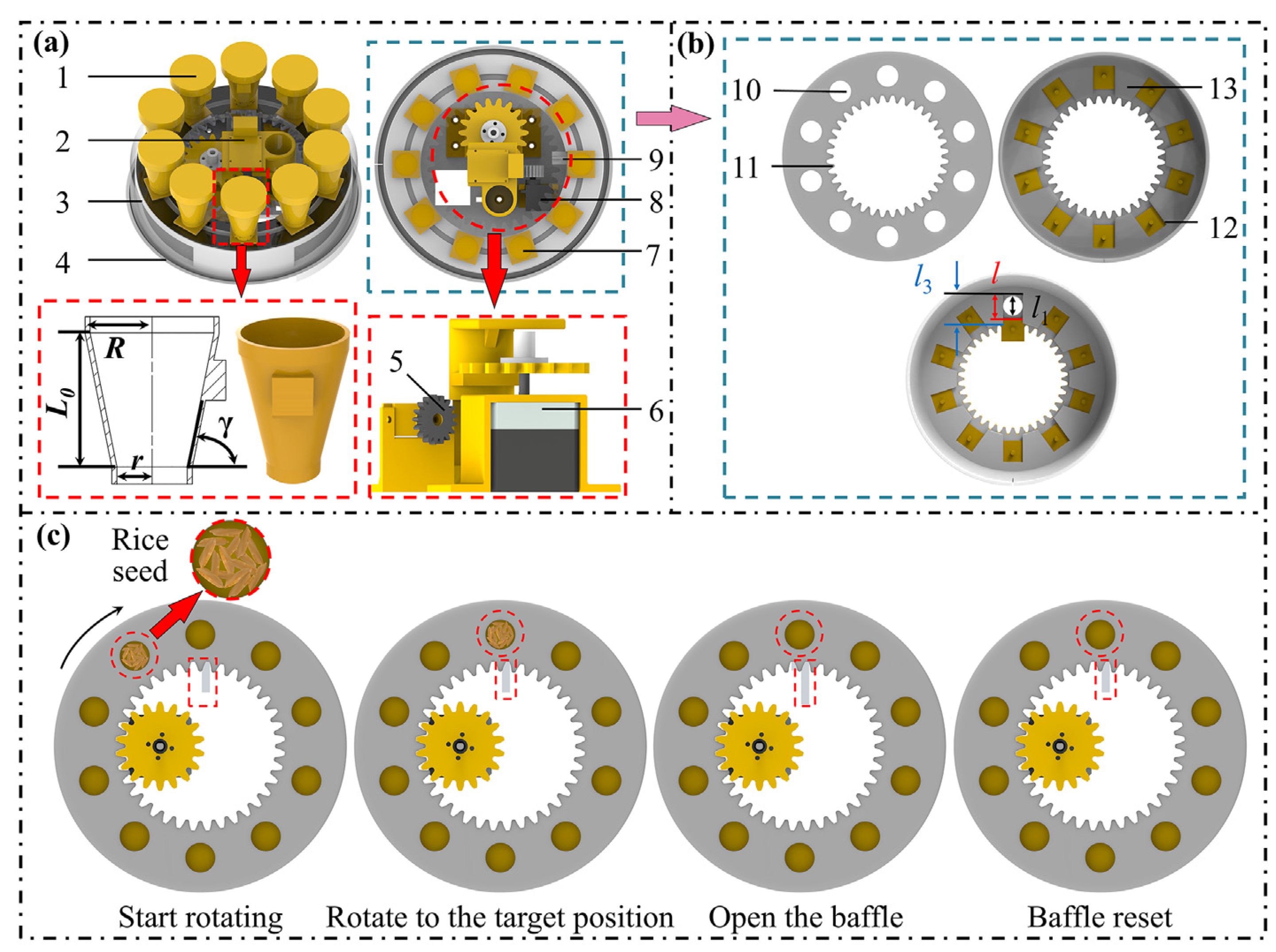
2.2.2. Seed-Switching Mechanism
- (1)
- Structural design of the seed supply box
- (2)
- Structural design of the seed-switching disc
- (3)
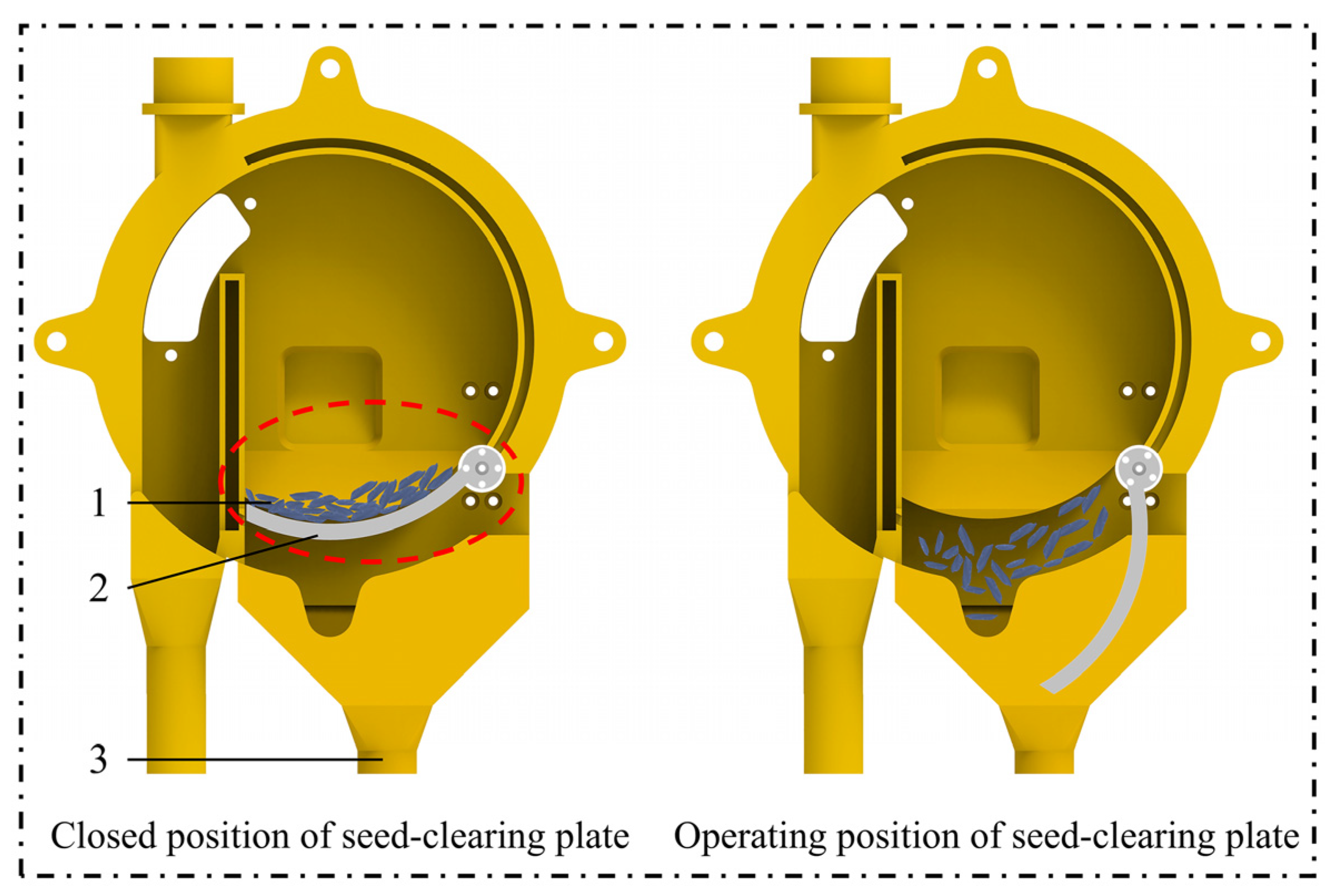
- Seed-clearing mechanism design
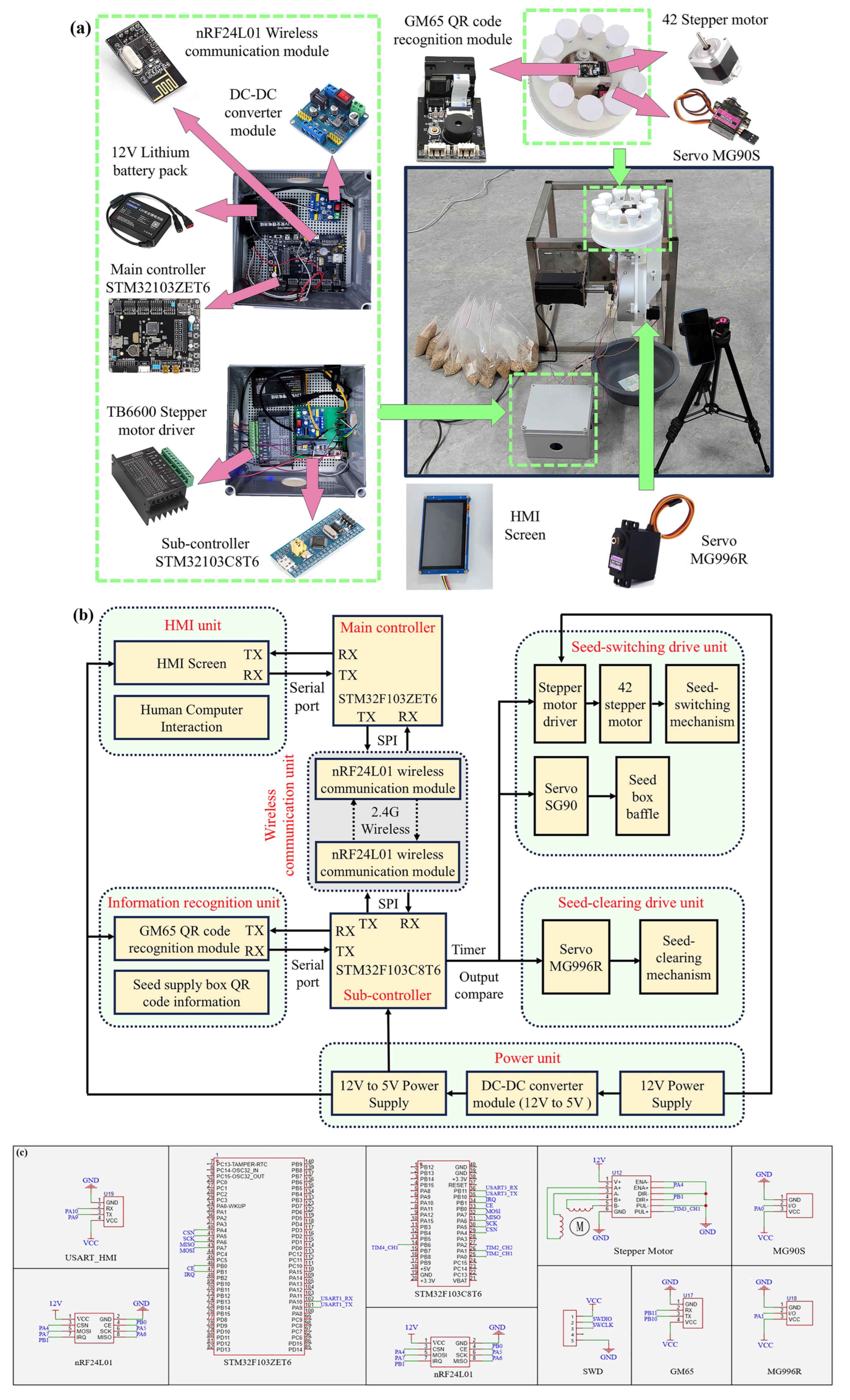
2.3. Hardware Design of the Control System
2.3.1. Main Controller
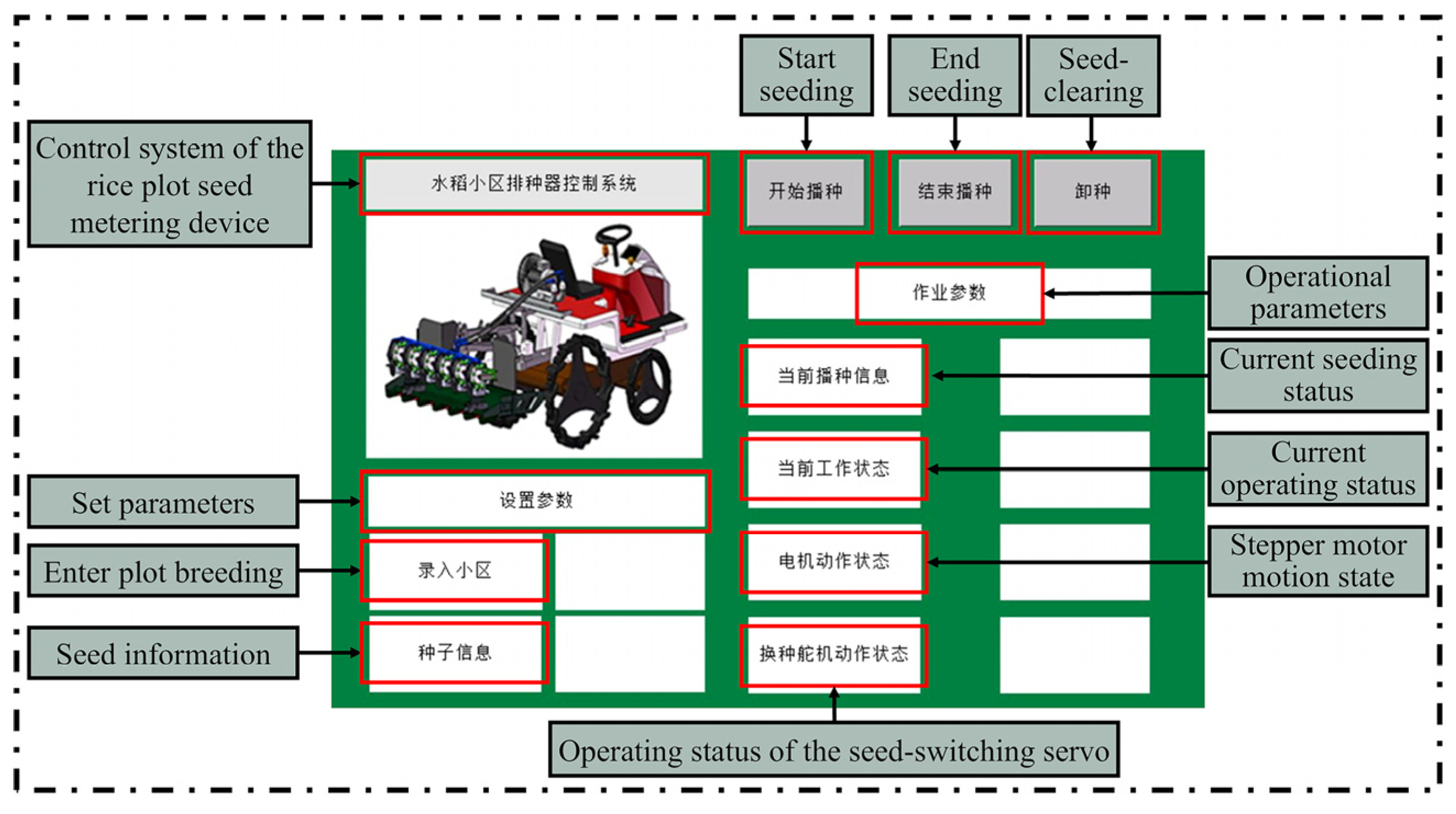
2.3.2. Human–Machine Interface Unit
2.3.3. Wireless Communication Unit
2.3.4. Sub-Controller
- (1)
- Seed-switching drive unit
- (2)
- Seed-clearing drive unit
2.4. Control System Software Design
2.4.1. Main Controller Software Design
2.4.2. Human–Machine Interface Design
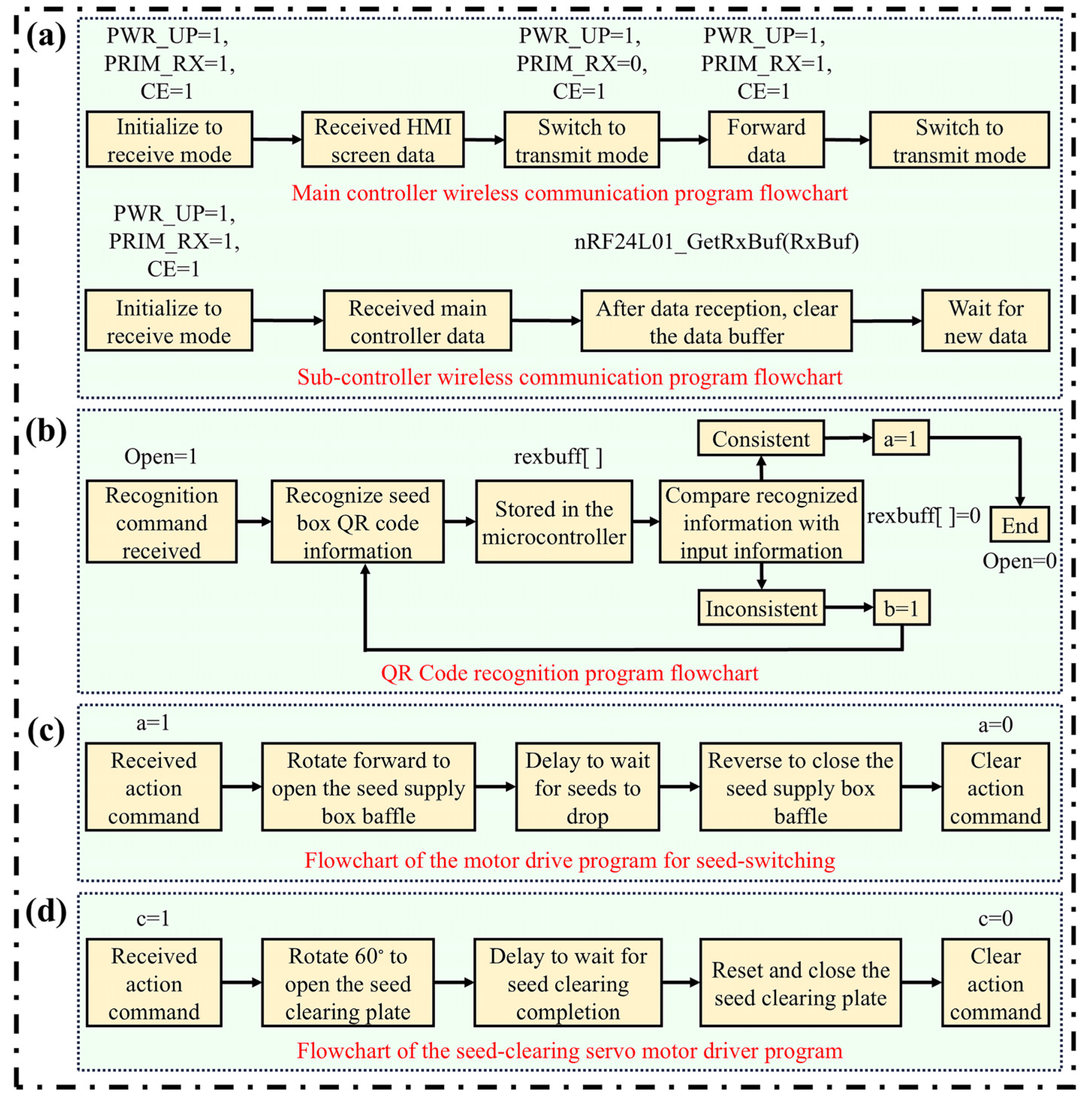
2.4.3. Wireless Communication Program Design
2.4.4. Sub-Controller Software Design
- (1)
- Information recognition program design
- (2)
- Seed-switching drive program design
- (3)
- Seed-clearing servo drive program design
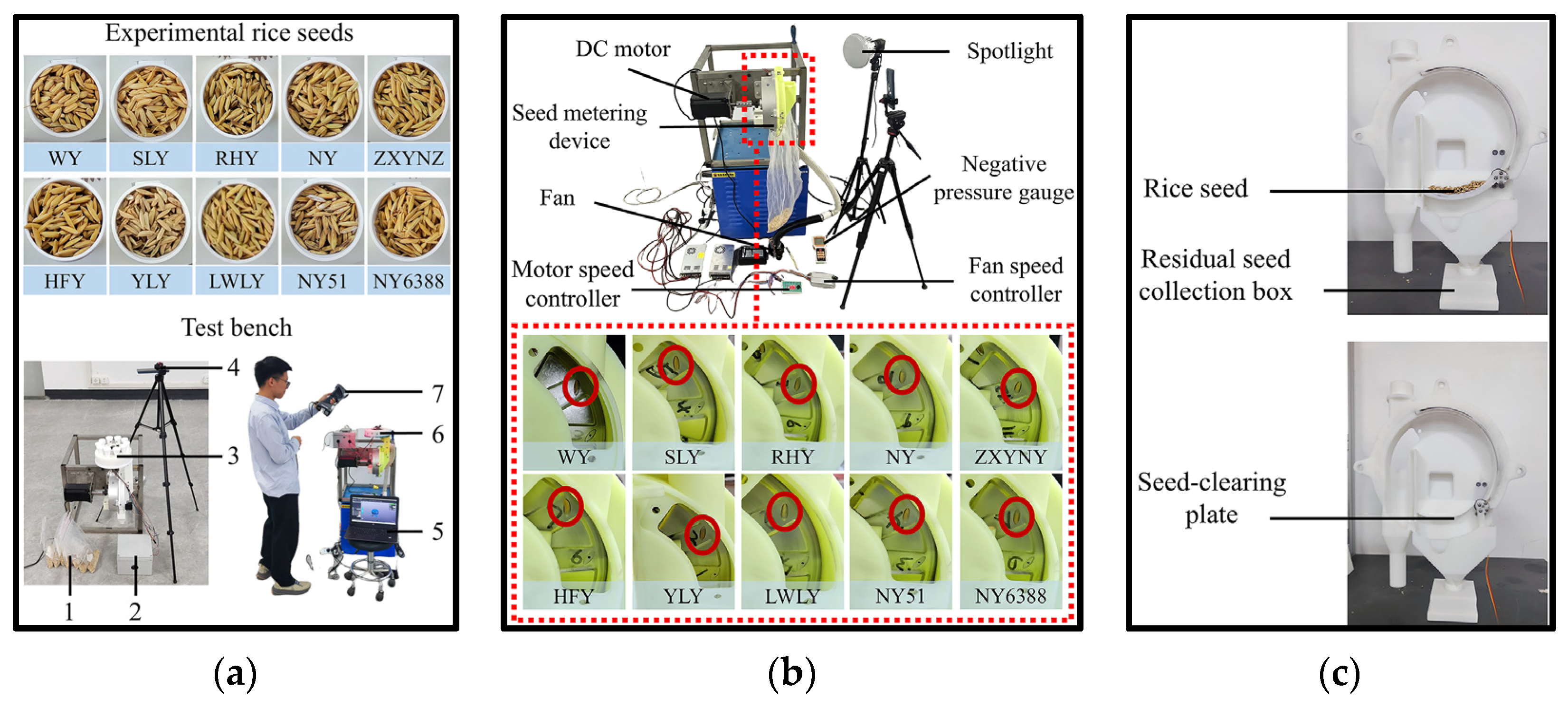
2.5. Performance Evaluation Test
2.5.1. Seed-Switching Performance Evaluation Experiment
2.5.2. Seed-Filling Performance Evaluation Experiment
2.5.3. Seed-Clearing Performance Evaluation Experiment
2.5.4. Double-Row Seed-Metering Device Synchronization Test
3. Results
3.1. Seed-Switching Performance Evaluation Test Results
3.2. Seed-Filling Performance Test Results
3.3. Seed-Clearing Performance Test Results
3.4. Double-Row Seed-Metering Device Synchronization Test Results
4. Discussion
- (1)
- In the seed-switching stage, an innovative variety identification and indexing strategy based on QR code recognition was developed. By coordinating the GM65 recognition module with a stepper motor, the system enables non-contact, contamination-free, and traceable high-efficiency seed switching, effectively reducing the risk of cross-contamination between varieties. The proposed mechanism avoids the response delays and structural complexity associated with traditional manual switching and multi-stage mechanical transmission, significantly improving the accuracy and operational efficiency of the seed-switching process, and providing stable and reliable technical support for continuous multi-variety seeding [10,32]. Furthermore, compared with the 10–15 s switching time required by existing automatic seed supply devices [41], the seed supply mechanism designed in this study achieves a substantial improvement in switching efficiency, further enhancing the system’s practicality and application value in high-frequency rice plot breeding tasks.
- (2)
- In the seed-metering stage, addressing the challenges posed by the varying shapes and sizes of rice grains, a method based on active extraction of seed contours and proportional iterative design was proposed. An optimized horizontal shallow-bowl suction hole structure was developed, which enabled high-precision seed filling at a rate of 1–2 seeds per hole, while also enhancing the device’s adaptability to multiple rice varieties.
- (3)
- In the seed-clearing stage, this study designed and implemented an automatic open–close seed-clearing device controlled by an MG996R servo, featuring rapid response and efficient removal of residual seeds. The device utilizes a servo-driven precise opening and closing mechanism, enabling complete seed clearance within a short period. Compared to existing seed-clearing mechanisms that typically require approximately 9 s to complete the process [42], the proposed device significantly reduces the clearing duration and improves operational efficiency. This effectively lowers the risk of cross-contamination between different seed varieties and provides reliable support for rapid switching between seeding tasks.
- (4)
- Additionally, a double-row seeding collaborative operation platform was developed based on a “1 + 2” master-slave multi-controller architecture. The system was validated to accurately perform seed-switching, seed-metering, and seed-clearing tasks under both standard and non-standard variety arrangements, demonstrating high consistency and stable responsiveness in multi-machine operation scenarios.
5. Conclusions
- (1)
- In this study, an air suction precision seed-metering control system for seed switching and seed clearing in rice plot breeding was developed. The system utilizes an HMI screen as the human–machine interaction terminal, with an STM32F103ZET6 microcontroller serving as the main controller and STM32F103C8T6 microcontrollers as sub-controllers. Data communication is achieved through nRF24L01 wireless modules. The control system enables the precise execution of seed-switching, seed-metering, and seed-clearing operations.
- (2)
- A seed-switching mechanism was developed, driven by a 42 stepper motor and an MG90S servo, with precise variety identification achieved through a GM65 QR code recognition module. The seed-switching disc accommodates 10 independently partitioned seed supply boxes, with each switching operation involving a 36° rotation. The average time for a single seed-switching operation was 0.83 s, the maximum absolute rotational error per step was less than 0.4°, and the cumulative absolute rotational error was less than 0.03°.
- (3)
- To evaluate the coordinated performance of the seed-metering system, a double-row seed-metering linkage test was conducted. The results showed that the master controller could effectively coordinate with multiple sub-controllers to achieve the precise control of each seed-metering device. In addition, the designed seed-switching and seed-clearing control system, along with its supporting mechanisms, enables rapid connection and replacement with the seed supply boxes and seed-metering discs of air suction precision rice seeders, meeting the flexible deployment requirements of rice plot breeding and field operations.
- (4)
- Although the seed-metering device developed in this study has demonstrated significant achievements in operational precision and coordination performance, further efforts will be made to enhance the adaptability of the seed-metering mechanism to complex field conditions. In future work, seed-metering trials involving a broader range of rice varieties will be conducted to comprehensively verify its operational compatibility with multiple rice varieties. In addition, extensive plot seeding trials for breeding will be carried out in various typical application scenarios, including dryland, paddy fields, and breeding stations, to evaluate the adaptability and stability of the seed-metering mechanism under different working environments.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| HFY | Hengfengyou 1179 |
| HMI | human–machine interaction |
| LWLY | Longwang Liangyou 889 |
| L-H | Length–Height |
| NY | Nayou 6618 |
| NY51 | Nayou 51 |
| NY6388 | Nayou 6388 |
| RHY | Ruanhuayou 1179 |
| SLY | Shenliangyou 1978 |
| WY | Wuyou 1179 |
| W-H | Width–Height |
| YLY | Y Liangyou 1378 |
| ZXYNZ | Zengxiangyou Nanzhan |
References
- FAO. Statistical Yearbook 2023—World Food and Agriculture. Available online: https://reliefweb.int/report/world/fao-statistical-yearbook-2023-world-food-and-agriculture (accessed on 5 April 2024).
- China Statistical Yearbook 2023. Available online: https://www.stats.gov.cn/sj/ndsj/2023/indexeh.htm (accessed on 4 March 2025).
- Shang, S.; Wu, X.; Yang, R.; Li, G.; Yang, X.; Chen, D. Research status and prospect of plot-sowing equipment and technology. Trans. Chin. Soc. Agric. Mach. 2021, 52, 1–20. [Google Scholar]
- Wang, X. Study on Air-Suction Precision Seeder for Rice Breeding in Community. Master’s Thesis, South China Agricultural University, Guangzhou, China, 2023. [Google Scholar]
- Zhao, J.; Gao, L.; Wang, J.; Zhang, W.; Qu, M. Design and experiment of a combined machine for returning straw fine powder to field. Tech. Autom. Appl. 2025, 44, 10–13. [Google Scholar]
- Wintersteiger. Smart Feed. Available online: https://www.wintersteiger.com/en/Plant-Breeding-and-Research/Products/Product-range/Plot-drills/590-Smart-Feed (accessed on 5 April 2024).
- Zurn Harvesting. ZÜRN D96. Available online: https://zuern-harvesting.de/feldversuchstechnik/zuern-d96/ (accessed on 5 July 2024).
- Almaco. Row Crop Planting System. Available online: https://www.almaco.com/equipment/planting-systems/row-crop-planting-systems/powerplant-automated-planting-system/ (accessed on 25 October 2023).
- Haldrup. Haldrup SR-30. Available online: https://en.haldrup.net/haldrup-products/haldrup-seeders/haldrup-sr-30/ (accessed on 7 January 2025).
- Dun, G.; Liu, W.; Mao, N.; Wu, X.; Ji, W.; Ma, H. Optimization design and experiment of alternate post changing seed metering device for soybean plot breeding. J. Jilin Univ. (Eng. Technol. Ed.) 2023, 53, 285–296. [Google Scholar]
- Hao, J.; Qin, J.; Yang, S.; Ai, Q.; Ma, Z. Design and experiments of a precision sowing unit with the spoon clip for single peanut seed planting in plot. Trans. Chin. Soc. Agric. Eng. 2023, 39, 33–41. [Google Scholar]
- Yang, W.; Fang, X.; Li, J.; Li, L. Design and experiment of air-suction precision seed meter with self-clearing seed chamber for corn plot test. Trans. Chin. Soc. Agric. Eng. 2019, 50, 64–73. [Google Scholar]
- Zhang, Y.; Tang, Y.; He, D.; Shi, J.; Hao, L.; Li, J.; Sun, D.; Li, H.; Zhang, Z.; Ye, S.; et al. Design and Test of Electromagnetic Vibration Type Fine and Small-Amount Seeder for Millet. Agriculture 2024, 14, 1528. [Google Scholar] [CrossRef]
- Yuan, X.; Huang, C.; Tao, G.; Yi, S.; Li, Y. Design and Experiment of Oil-Electric Hybrid Air-Suction Sorghum Plot Seeder. Agriculture 2024, 14, 432. [Google Scholar] [CrossRef]
- Wang, W.; Shi, W.; Liu, C.; Wang, Y.; Liu, L.; Chen, L. Development of automatic wheat seeding quantity control system based on Doppler radar speed measurement. Artif. Intell. Agric. 2025, 13, 12–25. [Google Scholar] [CrossRef]
- Wang, J.; Liao, M.; Xia, H.; Chen, R.; Li, J.; Li, J.; Yang, J. Study on a Novel Reseeding Device of a Precision Potato Planter. Agriculture 2024, 14, 1824. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, H.; Shi, Z.; Jin, W.; Chen, Y.; Yu, Y. Design and experiments of seed pickup status monitoring system for cotton precision dibblers. Trans. Chin. Soc. Agric. Eng. 2022, 38, 9–19. [Google Scholar]
- Li, Y.; Wan, L.; Xu, Z.; Yuan, H.; Chen, H.; Song, J. Design of automatic control system for plot batch seed cleaning machine. Trans. Chin. Soc. Agric. Eng. 2021, 37, 9–17. [Google Scholar]
- Liao, Q.; Luo, Z.; Yang, H.; Li, M.; Shen, W.; Wang, L. Variable-rate seeding control system based on RTK speed measurement for rapeseed direct seeder. Trans. Chin. Soc. Agric. Mach. 2024, 55, 65–74. [Google Scholar]
- Wang, H.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Xiao, T.; Li, H.; Du, Z.; Xie, C. Comparative investigation and evaluation of electric-drive seed-metering systems across diverse speed ranges for enhanced high-precision seeding applications. Comput. Electron. Agric. 2024, 222, 108976. [Google Scholar] [CrossRef]
- Qian, C.; Qin, W.; Jiang, Y.; Huang, Z.; Zhang, M.; Wang, Z.; Yang, W.; Zang, Y. Parameter optimization and experiment of the vacuum seed meter with double holes for direct seeding of rice. Int. J. Agric. Biol. Eng. 2025, 18, 89–99. [Google Scholar]
- Bao, G.; Zhang, Z.; Liu, L.; Li, J.; Tao, C.; Yang, W. Study on the Adsorption Mechanism of Spherical Particles near the Seed Metering Disk Surface by Narrow Elongated Suction Holes. Agriculture 2025, 15, 657. [Google Scholar] [CrossRef]
- Ding, L.; Yuan, Y.; Dou, Y.; Li, C.; He, Z.; Guo, G.; Zhang, Y.; Chen, B.; Li, H. Design and Experiment of Air-Suction Maize Seed-Metering Device with Auxiliary Guide. Agriculture 2024, 14, 169. [Google Scholar] [CrossRef]
- Chamara, N.; Bai, G.; Ge, Y. AICropCAM: Deploying classification, segmentation, detection, and counting deep-learning models for crop monitoring on the edge. Comput. Electron. Agric. 2023, 215, 108420. [Google Scholar] [CrossRef]
- Ma, J.; Li, Y.; Du, K.; Zheng, F.; Zhang, L.; Gong, Z.; Jiao, W. Segmenting ears of winter wheat at flowering stage using digital images and deep learning. Comput. Electron. Agric. 2020, 168, 105159. [Google Scholar] [CrossRef]
- Nadia, A.; Sharmin, S.R.; Afroz, J.; Muhammad, A.E.R.; Anisur, R. Inspection of paddy seed varietal purity using machine vision and multivariate analysis. J. Agric. Food Res. 2021, 3, 100109. [Google Scholar]
- Suresh, K.R.; Durgaprasad, P.; José, L.D.P.; Abderrahim, W.; Rajue, C.S.K.; Maddina, D.K.; Muneerah, A.N.; Ali, J.C. Contour analysis for heat transfer rate in a wedge geometry with non-uniform shapes nanofluid: Gradient descent machine learning technique. Results Eng. 2024, 23, 102714. [Google Scholar]
- María, C.Z.C.; Servando, D.L.C.R. A MATLAB App for calculating the age-dependent degree of erosion of monogenetic scoria cones from DEM data. MethodsX 2021, 8, 101454. [Google Scholar]
- Zha, X.; Chen, L.; Chen, D.; He, Y.; Yang, R. Design and Testing of a Branched Air-Chamber Type Pneumatic Seed Metering Device for Rice. Agriculture 2024, 14, 1934. [Google Scholar] [CrossRef]
- NY/T 1300-2022; Technical Code of Practice for the Variety Trial and Informatization of Crops—Rice (Oryza sativa L.). Ministry of Agriculture and Rural Affairs of the People’s Republic of China: Beijing, China, 2022.
- GB/T 6973-2005; Testing Methods of Single Seed Drills (Precision Drills). General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China: Beijing, China, 2005.
- Chen, H.; Wang, H.; Wang, Y.; Shi, N.; Wei, Z.; Dou, Y. Design and experiment of three-leaf type air-suction seed meter with automatic clear and replace seeds features for soybean plot test. Trans. Chin. Soc. Agric. Mach. 2020, 51, 75–85. [Google Scholar]
- Deng, S.; Feng, Y.; Cheng, X.; Wang, X.; Zhang, X.; Wei, Z. Disturbance analysis and seeding performance evaluation of a pneumatic-seed spoon interactive precision maize seed-metering device for plot planting. Biosyst. Eng. 2024, 247, 221–240. [Google Scholar] [CrossRef]
- Ma, X.; Gong, Q.; Wang, Q.; Xu, D.; Zhou, Y.; Chen, G.; Cao, X.; Wang, L. Design of an Air Suction Wheel-Hole Single Seed Drill for a Wheat Plot Dibbler. Agriculture 2022, 12, 1735. [Google Scholar] [CrossRef]
- Ma, Y. Design and Experiment of Rice Breeding Fine Quantity Sowing Device. Master’s Thesis, South China Agricultural University, Guangzhou, China, 2016. [Google Scholar]
- Yang, R.; Wang, J.; Shang, S.; Zha, X.; Pan, Z.; Wang, Z. Design and Experiment of Potato Breeding Planter with Rotary Table Grid. Trans. Chin. Soc. Agric. Mach. 2023, 54, 84–93. [Google Scholar]
- Liu, D.; Ma, J.; Qiao, X.; Xin, P.; Zhang, X.; Wang, J.; Zheng, D. The design of and experiments with a double-row seed-metering device for buckwheat breeding in an experimental area. Agronomy 2023, 13, 2857. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, D.; Yang, L.; Cui, T.; Song, W.; He, X.; Wu, H.; Dong, J. Optimal Design and Experiment of Critical Components of Hand-Pushing Corn Plot Precision Planter. Agriculture 2022, 12, 2103. [Google Scholar] [CrossRef]
- Wang, H.; Tang, Y.; Dong, Z.; Wang, M.; Zhao, J. Self-alignment algorithm of wheat plot breeding path based on Beidou satellite positioning. J. Zhejiang Agric. Univ. 2019, 31, 1709–1716. [Google Scholar]
- Roberto, E.T.; Rossana, M.C.A.; Erwin, Q.; Peralta, E.K. Development of a single-row push type plot seeder with mechatronic seed feeding device for corn (Zea mays L) field breeding experiment. In Proceedings of the 5th International Conference on Agriculture, Environment, and Food Security, Jember, Indonesia, 18 November 2021. [Google Scholar]
- Liu, S.; Shang, S.; Yang, R.; Zheng, Y.; Wang, Y.; Li, Q. Design of Automatic Supplying Seed System for Plot Seeder of Rape. Trans. Chin. Soc. Agric. Mach. 2011, 42, 91–95. [Google Scholar]
- Ran, Y.; Wang, S.; Wang, Y.; Yu, Y.; Li, H. Design of Cleaning Device for Plot Seed Planter in Soybean. Soybean Sci. Technol. 2019, 6, 16–20. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rice Seed Varieties | Size Parameters | Static Friction Angle/° (Rice Seed–Stainless Steel Interface) | Thousand Kernel Weight/g | |||
|---|---|---|---|---|---|---|
| L/mm | W/mm | H/mm | L-H | W-H | ||
| WY | 8.48 | 2.45 | 1.57 | 33.69 | 21.49 | 24.34 |
| SLY | 8.95 | 2.49 | 1.61 | 36.31 | 27.85 | 22.66 |
| RHY | 9.21 | 1.89 | 1.41 | 35.96 | 18.75 | 18.11 |
| NY | 9.90 | 1.92 | 1.46 | 32.96 | 20.61 | 18.71 |
| ZXYNZ | 9.12 | 1.90 | 1.33 | 32.60 | 18.26 | 18.94 |
| HFY | 9.71 | 2.14 | 1.53 | 35.32 | 18.71 | 21.29 |
| YLY | 9.19 | 2.30 | 1.61 | 31.13 | 22.92 | 20.63 |
| LWLY | 8.82 | 1.93 | 1.41 | 32.26 | 18.76 | 21.30 |
| NY51 | 9.01 | 1.87 | 1.36 | 27.78 | 17.71 | 18.72 |
| NY6388 | 9.03 | 2.01 | 1.53 | 26.99 | 16.21 | 18.82 |
| Seed Varieties | Length–Width Axis | Width–Height Axis |
|---|---|---|
| WY | y = 120.7x6 − 457.6x5 + 680.7x4 − 497.0x3 + 187.8x2 − 38.2x + 4.54 | y′ = 2.9x′2 − 2.8x′ + 0.72 |
| SLY | y = 127.1x6 − 493.9x5 + 741.5x4 − 535.7x3 + 195.3x2 − 37.1x + 4.05 | y′ = 1.9x′2 − 2.3x′ + 0.78 |
| RHY | y = 244.9x6 − 651.9x5 + 711.5x4 − 427.3x3 + 165.0x2 − 38.8x + 3.94 | y′ = 2.8x′2 − 2.8x′ + 0.69 |
| NY | y = 698.8x6 − 2115.4x5 + 2499.7x4 − 1443.4x3+ 425.1x2 − 63.1x + 4.62 | y′ = 2.7x′2 − 2.5x′ + 0.61 |
| ZXYNZ | y = 451.0x6 − 1263.1x5 + 1439.7x4 − 840.7x3 + 264.2x2 − 45.7x + 4.60 | y′ = 2.7x′2 − 2.6x′ + 0.64 |
| HFY | y = 201.75x6 − 601.7x5 + 735.5x4–495.0x3 + 204.1x2 − 46.5x + 4.31 | y′ = 2.5x′2 − 2.7x′ + 0.74 |
| YLY | y = 303.1x6 − 1042.4x5 + 1384.3x4 − 890.8x3 + 292.4x2 − 50.14x + 4.66 | y′ = 2.2x′2 − 2.5x′ + 0.71 |
| LWLY | y = 774.5x6 − 2322.9x5 + 2718.6x4 − 1558.4x3+ 456.8x2 − 66.9x + 4.56 | y′ = 2.5x′2 − 2.5x′ + 0.69 |
| NY51 | y = 14.0x6 − 84.7x5 + 198.8x4 − 224.8x3 + 125.7x2 − 32.8x + 3.69 | y′ = 0.9x′2 − 1.6x′ + 0.69 |
| NY6388 | y = 14.8x6 − 91.1x5 + 218.0x4 − 254.6x3 + 151.9x2 − 44.4x + 5.48 | y′ = 0.6x′2 − 1.3x′ + 0.76 |
| Seed Quantity | Missing Seed Rate/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| WY | SLY | RHY | NY | ZXYNZ | HFY | YLY | LWLY | NY51 | NY6388 | |
| 300 | 29.2 | 21.3 | 49.3 | 40.0 | 12.7 | 39.3 | 13.3 | 22.0 | 40.0 | 60.7 |
| 400 | 10.8 | 6.0 | 31.3 | 10.0 | 6.0 | 10.0 | 4.7 | 10.7 | 10.0 | 22.6 |
| 500 | 8.4 | 2.0 | 6.7 | 5.3 | 2.0 | 4.7 | 1.3 | 3.3 | 5.3 | 0.7 |
| Levels | Factors | |
|---|---|---|
| Rotational Speed/r·min−1 (A) | Negative Pressure/Pa (B) | |
| 1 | 20 | 2400 |
| 2 | 40 | 2800 |
| 3 | 60 | 3200 |
| 4 | 3600 | |
| Seed Varieties | Seed-Switching Time/s | Theoretical Rotation Angle/° | Actual Rotation Angle/° | Single-Step Angle Error/° | Total Error/° |
|---|---|---|---|---|---|
| WY | 0.80 | 36 | 36.05 | 0.05 | 0.05 |
| SLY | 0.97 | 36 | 36.08 | 0.08 | 0.13 |
| RHY | 0.83 | 36 | 36.10 | 0.10 | 0.23 |
| NY | 0.83 | 36 | 35.88 | −0.12 | 0.11 |
| ZXYNZ | 0.77 | 36 | 36.20 | 0.20 | 0.31 |
| HFY | 0.73 | 36 | 35.61 | −0.39 | −0.08 |
| YLY | 0.63 | 36 | 36.06 | 0.06 | −0.02 |
| LWLY | 1.13 | 36 | 36.12 | 0.12 | 0.10 |
| NY51 | 0.83 | 36 | 35.78 | −0.22 | −0.12 |
| NY6388 | 0.80 | 36 | 36.09 | 0.09 | −0.03 |
| Factor | Value | Seed Varieties | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| WY | SLY | RHY | NY | ZXYNZ | HFY | YLY | LWLY | NY51 | NY6388 | ||
| Missing Seed Rate | |||||||||||
| A | SD | 11.0 | 9.2 | 9.1 | 6.9 | 4.9 | 15.1 | 12.4 | 13.6 | 8.0 | 7.3 |
| B | 4.1 | 5.1 | 2.2 | 5.2 | 7.0 | 4.5 | 11.2 | 7.5 | 5.0 | 4.2 | |
| A | F | 68.2 | 36.9 | 17.9 | 6.2 | 4.7 | 56.4 | 21.0 | 17.8 | 7.6 | 18.7 |
| B | 9.6 | 11.2 | 1.1 | 3.5 | 9.6 | 5.1 | 17.2 | 5.4 | 3.0 | 6.1 | |
| A | p | ** | ** | ** | * | – | ** | ** | ** | * | ** |
| B | * | ** | – | – | * | * | ** | * | – | * | |
| Factor | Value | Single and Double Seed Rate | |||||||||
| A | SD | 11.6 | 8.7 | 7.8 | 5.6 | 6.2 | 14.6 | 12.2 | 12.4 | 7.6 | 3.1 |
| B | 3.4 | 4.8 | 0.9 | 4.1 | 5.2 | 3.2 | 10.5 | 6.7 | 2.3 | 2.1 | |
| A | F | 79.1 | 9.2 | 7.8 | 4.5 | 6.4 | 60.4 | 17.1 | 15.4 | 4.9 | 6.9 |
| B | 6.7 | 2.8 | 0.1 | 2.4 | 4.6 | 2.9 | 12.6 | 4.6 | 0.5 | 1.0 | |
| A | p | ** | * | * | – | * | ** | ** | ** | – | * |
| B | * | – | – | – | – | – | ** | – | – | – | |
| Factor | Value | Multiple Seed Rate | |||||||||
| A | SD | 0.8 | 1.6 | 1.3 | 3.4 | 2.1 | 1.1 | 0.3 | 1.3 | 1.00 | 3.1 |
| B | 0.9 | 3.0 | 1.9 | 2.1 | 3.3 | 1.0 | 0.9 | 1.1 | 2.79 | 2.1 | |
| A | F | 13.4 | 0.5 | 1.2 | 37.2 | 2.6 | 2.0 | 0.2 | 4.0 | 1.9 | 4.9 |
| B | 14.9 | 1.7 | 2.4 | 15.1 | 6.1 | 1.7 | 1.7 | 3.0 | 14.4 | 2.1 | |
| A | p | ** | – | – | ** | – | – | – | – | – | – |
| B | ** | – | – | ** | * | – | – | – | ** | – | |
| Number | Factor | WY | SLY | RHY | NY | ZXYNZ | HFY | YLY | LWLY | NY51 | NY6388 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | |||||||||||
| 1 | 1 | 1 | 49.6 | 49.1 | 49.6 | 49.0 | 49.2 | 49.3 | 48.5 | 49.4 | 49.0 | 49.5 |
| 2 | 1 | 2 | 49.9 | 49.6 | 49.8 | 49.3 | 48.7 | 49.4 | 49.5 | 49.5 | 48.6 | 49.7 |
| 3 | 1 | 3 | 49.7 | 49.7 | 49.5 | 49.7 | 49.8 | 49.7 | 49.6 | 49.6 | 49.0 | 49.8 |
| 4 | 1 | 4 | 49.9 | 49.6 | 49.4 | 49.0 | 49.7 | 49.4 | 49.7 | 49.5 | 48.5 | 49.4 |
| 5 | 2 | 1 | 48.9 | 48.9 | 49.9 | 49.4 | 48.6 | 48.6 | 48.2 | 48.4 | 48.4 | 48.9 |
| 6 | 2 | 2 | 49.0 | 49.2 | 48.9 | 49.4 | 49.1 | 48.5 | 49.4 | 49.4 | 48.2 | 49.2 |
| 7 | 2 | 3 | 49.2 | 49.3 | 48.2 | 49.5 | 49.2 | 49.0 | 49.3 | 49.2 | 48.8 | 48.6 |
| 8 | 2 | 4 | 49.2 | 48.4 | 49.2 | 49.4 | 49.2 | 48.1 | 49.4 | 49.2 | 48.6 | 49.2 |
| 9 | 3 | 1 | 48.3 | 48.2 | 48.4 | 48.1 | 48.2 | 47.5 | 47.5 | 47.3 | 47.5 | 48.5 |
| 10 | 3 | 2 | 48.5 | 48.5 | 49.0 | 49.0 | 48.5 | 47.8 | 47.6 | 48.6 | 48.2 | 49.0 |
| 11 | 3 | 3 | 48.7 | 49.1 | 48.8 | 49.0 | 48.6 | 48.0 | 48.6 | 48.7 | 47.9 | 49.1 |
| 12 | 3 | 4 | 49.0 | 48.8 | 49.0 | 49.2 | 49.2 | 48.3 | 48.9 | 48.5 | 48.4 | 49.3 |
| Seed | Seed-Clearing Time/s | Residual Seeds Numbers | Seed-Clearing Rate/% | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 300 | 400 | 500 | 300 | 400 | 500 | 300 | 400 | 500 | |
| WY | 0.9 | 1.0 | 1.0 | 0 | 0 | 0 | 100 | 100 | 100 |
| SLY | 0.8 | 0.8 | 0.9 | 0 | 0 | 0 | 100 | 100 | 100 |
| RHY | 0.8 | 0.8 | 0.9 | 0 | 0 | 0 | 100 | 100 | 100 |
| NY | 0.9 | 1.0 | 1.0 | 0 | 0 | 0 | 100 | 100 | 100 |
| ZXYNZ | 0.8 | 0.8 | 0.9 | 0 | 0 | 0 | 100 | 100 | 100 |
| HFY | 0.8 | 0.9 | 1.0 | 0 | 0 | 0 | 100 | 100 | 100 |
| YLY | 0.8 | 0.8 | 0.9 | 0 | 0 | 0 | 100 | 100 | 100 |
| LWLY | 0.8 | 0.8 | 0.9 | 0 | 0 | 0 | 100 | 100 | 100 |
| NY51 | 0.8 | 0.9 | 0.9 | 0 | 0 | 0 | 100 | 100 | 100 |
| NY6388 | 0.8 | 0.9 | 1.0 | 0 | 0 | 0 | 100 | 100 | 100 |
| Number | Seed-Switching Disc Actuation Time/s | Recognition Time/s | Total Duration/s | Action Compliance with Expectations |
|---|---|---|---|---|
| 1 | 1.4 | 0.2 | 1.6 | Yes |
| 2 | 1.5 | 0.3 | 1.8 | Yes |
| 3 | 1.4 | 0.3 | 1.7 | Yes |
| 4 | 1.4 | 0.2 | 1.6 | Yes |
| 5 | 1.5 | 0.2 | 1.7 | Yes |
| 6 | 1.5 | 0.3 | 1.8 | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, W.; Li, Y.; Qian, C.; Fan, Z.; Yan, D.; Zou, G.; Liu, S.; Wang, Z.; Zang, Y.; Zhang, M. The Development of an Air Suction Precision Seed-Metering Device for Rice Plot Breeding. Agronomy 2025, 15, 1642. https://doi.org/10.3390/agronomy15071642
Qin W, Li Y, Qian C, Fan Z, Yan D, Zou G, Liu S, Wang Z, Zang Y, Zhang M. The Development of an Air Suction Precision Seed-Metering Device for Rice Plot Breeding. Agronomy. 2025; 15(7):1642. https://doi.org/10.3390/agronomy15071642
Chicago/Turabian StyleQin, Wei, Yuwu Li, Cheng Qian, Zhuorong Fan, Daoqing Yan, Guo Zou, Siqian Liu, Zaiman Wang, Ying Zang, and Minghua Zhang. 2025. "The Development of an Air Suction Precision Seed-Metering Device for Rice Plot Breeding" Agronomy 15, no. 7: 1642. https://doi.org/10.3390/agronomy15071642
APA StyleQin, W., Li, Y., Qian, C., Fan, Z., Yan, D., Zou, G., Liu, S., Wang, Z., Zang, Y., & Zhang, M. (2025). The Development of an Air Suction Precision Seed-Metering Device for Rice Plot Breeding. Agronomy, 15(7), 1642. https://doi.org/10.3390/agronomy15071642