
Advancements of UAV and Deep Learning Technologies for Weed Management in Farmland


Abstract
1. Introduction
2. UAV Platform and Application
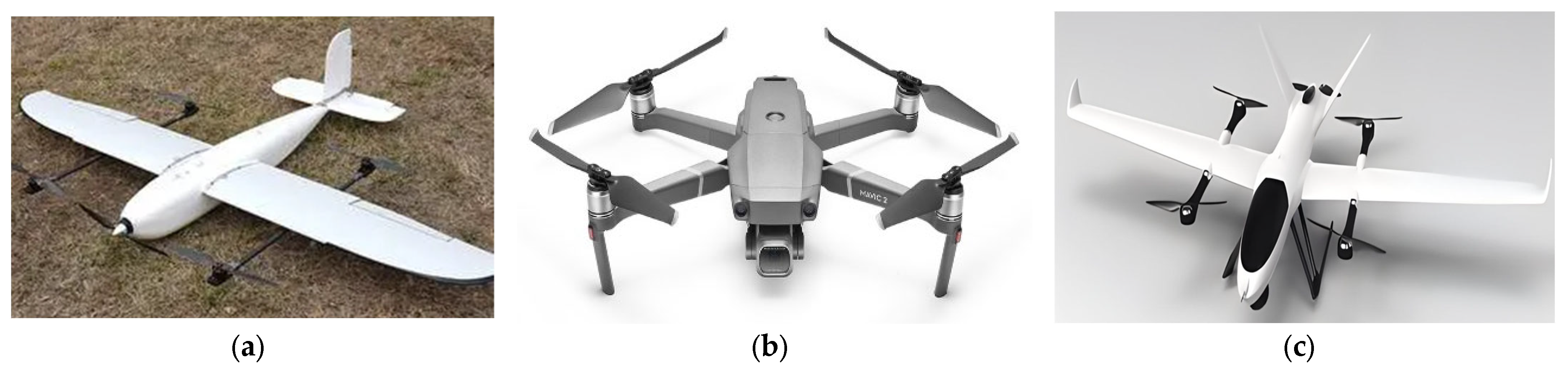
2.1. Types of UAV Platforms
2.1.1. Fixed-Wing UAV
2.1.2. Multi-Rotor UAV
2.1.3. Vertical Takeoff and Landing UAV
2.1.4. Brief Summary
2.2. Drone Platform Vision Sensor
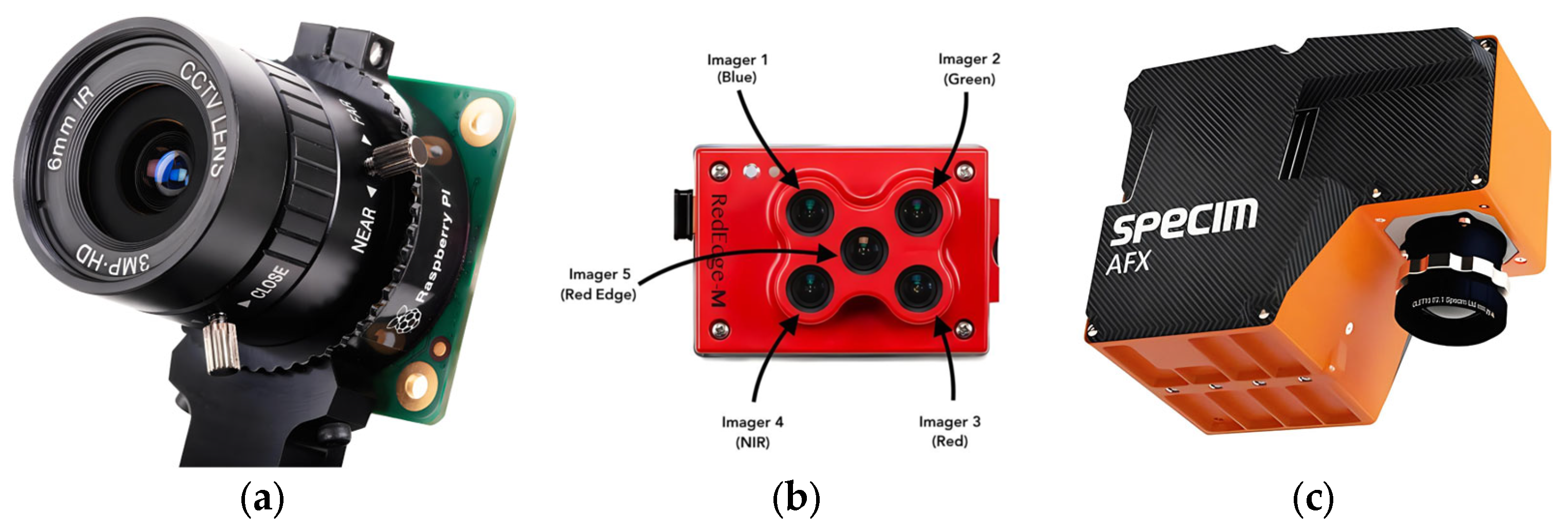
2.2.1. RGB Sensor
2.2.2. Hyperspectral Sensor
2.2.3. Multi-Spectral Sensor
2.2.4. Brief Summary
3. Application of Deep Learning to Weed Management
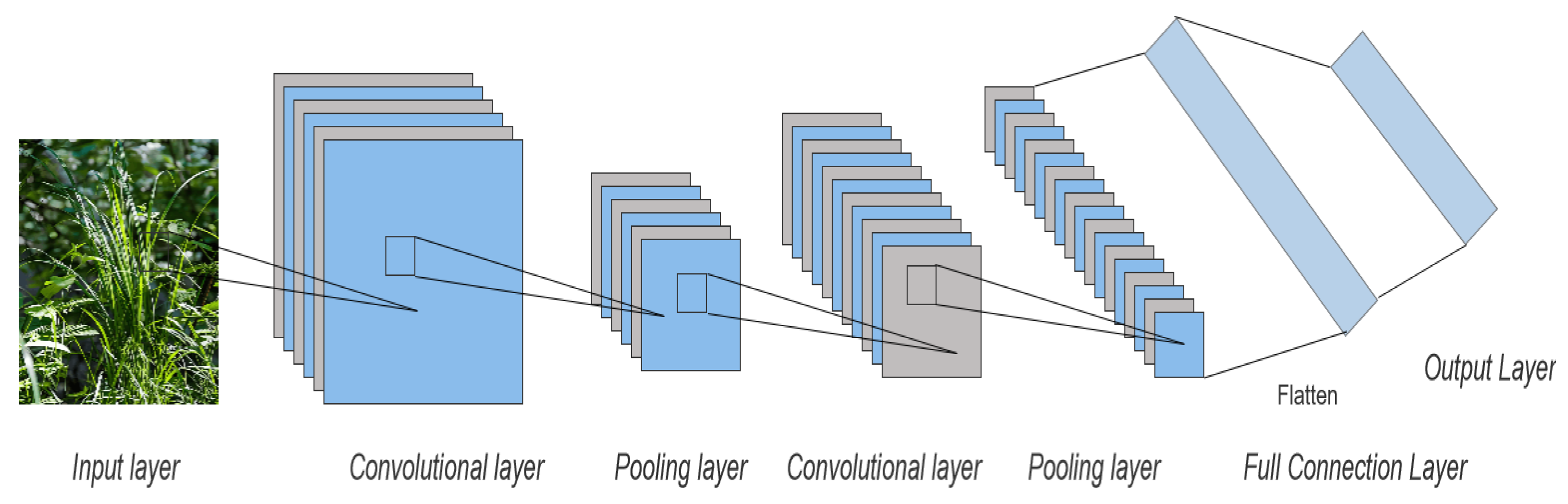
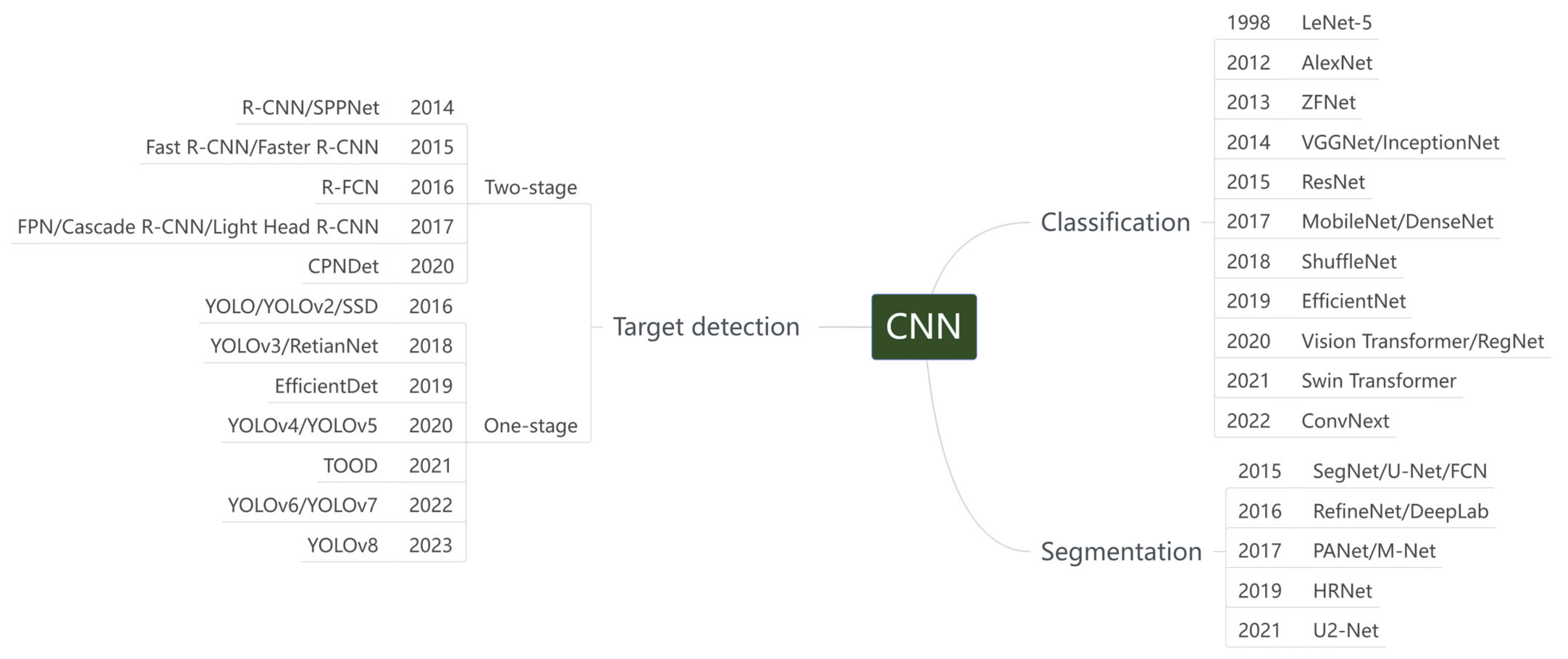
3.1. Convolutional Neural Network
3.2. Application of Convolutional Neural Networks
3.2.1. Object Detection
3.2.2. Image Segmentation
3.2.3. Image Classification
3.2.4. Brief Summary
- There are many kinds of weeds and different kinds of weeds have great differences in morphology and color, which brings difficulties to feature extraction and classifier design;
- In practical application, due to the influence of lighting, shadow, occlusion, and other factors, the quality of weed images is often poor, which will affect the accuracy of model recognition;
- The training of convolutional neural networks requires a large amount of labeled data, which increases the difficulty and cost of data collection and labeling.
4. Application of Drones and Deep Learning Techniques to Weed Management
4.1. Weed Detection and Classification
4.2. Weed Mapping

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Crop | Task | Types | Location | Dataset | Network | Improvement | UAV Types | F1 Score | Precision | Recall | Acc | Metrics |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [73] | Beet/parsley/ Spinach/Weed | Classification | RGB | Loire Region, France | 19,265 | Vision Transformers | Transfer learning | Pilgrim UAV | 97.1% | 98.5% | 95.7% | ||
| [75] | Sorghum/Weed | Segmentation | RGB | sorghum field, Southern Germany | 1300 | DeBlurWeedSeg | Deblurring | DJI Mavic 2 Pro | DS: 0.9048 | ||||
| [76] | Soybean/Weed | Detection | RGB | Heihe City, Heilongjiang Province, China | 3000 | YOLOv7-FWeed | M-MHSA | DJI Mavic 3M | 93.07% | 94.96% | 91.25% | mAP: 96.6% | |
| [77] | Soybean/Weed | Classification | RGB | Campo Grande, Brazil | 15,336 | ConvNets | SLIC Superpixel | DJI Phantom 3 Professional | 99.5% | ||||
| [78] | Soybean/Weed | Segmentation | RGB | Madison, Wisconsin, USA | 1181 | Self-built | ResNet101_v/DSASPP | DJI Phantom 4 V2 Pro | 90.5% | ||||
| [79] | Wheat spike/Weed | Detection | RGB | Rugao City, Jiangsu Province, China | 7000 | OSWSDet | YOLOv5 | DJITM Matrice TM 210 | 96% | 90% | AP: 90.5% | ||
| [82] | Cotton/Weed | Detection | RGB | Texas, USA | 1230 | Mask R-CNN | GAN/ transfer learning | Hylio AG-110 | mAPm: 0.8mAPb: 0.83 | ||||
| [83] | Pineapple/Weed | Identification | RGB | Zhangjiang, Guangdong Province, China | 2176 | PSPNet | ECA module | DJI mavic 2 | 87.79% | mPA: 88.6%mIOU: 80% | |||
| [84] | Ecological Irrigation Area | Classification | RGB/ Multispectral | Zhuozhou farm, Beijing City, China | 3266 | self-constructed CNN | MAML/ transfer learning | DJI M100 DJI Phantom 3 Pro | 96.02% | ||||
| [85] | Grassland | Mapping | RGB | Salmorth, Germany | 6773 | VGG16 | OBIA | DJI Phantom 3 Pro DJI Phantom 4 Pro | 78.7% | 71.43% | 87.50% | 92.1% | |
| [87] | Winter Wheat/ Weed | Mapping | RGB | Brunswick, Germany | 16,500 | DCNN | ResNet-18 | Hexa-copter system | 93.5% | 92.67% | 94% | ||
| [90] | Weed | Segmentation | RGB | Beijing, China | 100 | U-Net | Dilation convolution | DJI MAVIC 2 | 84.29% | 80.85% | 98.84% | IoU: 93.40% | |
| [91] | Sugar beet/Weed | Segmentation | Multispectral | Rheinbach, Germany Eschikon, Switzerland | DeepMultiFuse | Inspire-2 | 97.3% | mIOU: 97.1% | |||||
| [92] | Beet/Chicory/Weed | Detection | RGB | Central Belgium | 3373 | YOLOv7 | DJI phantom4 pro | 61.3% | 54.8% | mAP: 56.6% |
4.3. Drone Spray
4.4. Brief Summary
5. Conclusions
5.1. Data Acquisition
5.2. Dataset
5.3. Vision Sensor
5.4. Algorithm Selection
5.5. Difficulties in the Development of Drones and Deep Learning Technology
6. Conclusions and Future Trends
6.1. Data
6.2. Field Weed Management System
6.3. The Development of Drone Platforms
6.4. Accuracy of Weed Identification
6.5. Collaborative Drone Operations
6.6. The Generalization Ability of the Model
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Istiak, M.A.; Syeed, M.M.; Hossain, M.S.; Uddin, M.F.; Hasan, M.; Khan, R.H.; Azad, N.S. Adoption of Unmanned Aerial Vehicle (UAV) imagery in agricultural management: A systematic literature review. Ecol. Inform. 2023, 78, 102305. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K.; Ropelewska, E.; Gültekin, S.S. A Comprehensive Survey of the Recent Studies with UAV for Precision Agriculture in Open Fields and Greenhouses. Appl. Sci. 2022, 12, 1047. [Google Scholar] [CrossRef]
- Liu, Y.; Pu, H.; Sun, D.-W. Efficient extraction of deep image features using convolutional neural network (CNN) for applications in detecting and analysing complex food matrices. Trends Food Sci. Technol. 2021, 113, 193–204. [Google Scholar] [CrossRef]
- Naveed, A.; Muhammad, W.; Irshad, M.J.; Aslam, M.J.; Manzoor, S.M.; Kausar, T.; Lu, Y. Saliency-Based Semantic Weeds Detection and Classification Using UAV Multispectral Imaging. IEEE Access 2023, 11, 11991–12003. [Google Scholar] [CrossRef]
- Roslim, M.H.M.; Juraimi, A.S.; Che’ya, N.N.; Sulaiman, N.; Manaf, M.N.H.A.; Ramli, Z.; Motmainna, M. Using Remote Sensing and an Unmanned Aerial System for Weed Management in Agricultural Crops: A Review. Agronomy 2021, 11, 1809. [Google Scholar] [CrossRef]
- MacLaren, C.; Storkey, J.; Menegat, A.; Metcalfe, H.; Dehnen-Schmutz, K. An ecological future for weed science to sustain crop production and the environment. A review. Agron. Sustain. Dev. 2020, 40, 24. [Google Scholar] [CrossRef]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. A survey on deep learning-based identification of plant and crop diseases from UAV-based aerial images. Clust. Comput. 2022, 26, 1297–1317. [Google Scholar] [CrossRef]
- Darwin, B.; Dharmaraj, P.; Prince, S.; Popescu, D.E.; Hemanth, D.J. Recognition of Bloom/Yield in Crop Images Using Deep Learning Models for Smart Agriculture: A Review. Agronomy 2021, 11, 646. [Google Scholar] [CrossRef]
- Tian, H.; Wang, T.; Liu, Y.; Qiao, X.; Li, Y. Computer vision technology in agricultural automation—A review. Inf. Process. Agric. 2019, 7, 1–19. [Google Scholar] [CrossRef]
- Sakamoto, T.; Yokozawa, M.; Toritani, H.; Shibayama, M.; Ishitsuka, N.; Ohno, H. A crop phenology detection method using time-series MODIS data. Remote Sens. Environ. 2005, 96, 366–374. [Google Scholar] [CrossRef]
- White, M.A.; Nemani, R.R. Real-time monitoring and short-term forecasting of land surface phenology. Remote Sens. Environ. 2006, 104, 43–49. [Google Scholar] [CrossRef]
- Sakamoto, T.; Gitelson, A.A.; Arkebauer, T.J. MODIS-based corn grain yield estimation model incorporating crop phenology information. Remote Sens. Environ. 2013, 131, 215–231. [Google Scholar] [CrossRef]
- Sapkota, R.; Stenger, J.; Ostlie, M.; Flores, P. Towards reducing chemical usage for weed control in agriculture using UAS imagery analysis and computer vision techniques. Sci. Rep. 2023, 13, 6548. [Google Scholar] [CrossRef]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. Deep learning techniques to classify agricultural crops through UAV imagery: A review. Neural Comput. Appl. 2022, 34, 9511–9536. [Google Scholar] [CrossRef]
- Matongera, T.N.; Mutanga, O.; Dube, T.; Lottering, R.T. Detection and mapping of bracken fern weeds using multispectral remotely sensed data: A review of progress and challenges. Geocarto Int. 2016, 33, 209–224. [Google Scholar] [CrossRef]
- Qi, L.; Hu, C. To what extent can Ulva and Sargassum be detected and separated in satellite imagery? Harmful Algae 2021, 103, 102001. [Google Scholar] [CrossRef]
- Gašparović, M.; Zrinjski, M.; Barković, D.; Radočaj, D. An automatic method for weed mapping in oat fields based on UAV imagery. Comput. Electron. Agric. 2020, 173, 105385. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, H.; Wu, Z.; Wang, S.; Sun, H.; Senthilnath, J.; Wang, J.; Bryant, C.R.; Fu, Y. Modified Red Blue Vegetation Index for Chlorophyll Estimation and Yield Prediction of Maize from Visible Images Captured by UAV. Sensors 2020, 20, 5055. [Google Scholar] [CrossRef]
- Amarasingam, N.; Hamilton, M.; Kelly, J.E.; Zheng, L.; Sandino, J.; Gonzalez, F.; Dehaan, R.L.; Cherry, H. Autonomous Detection of Mouse-Ear Hawkweed Using Drones, Multispectral Imagery and Supervised Machine Learning. Remote Sens. 2023, 15, 1633. [Google Scholar] [CrossRef]
- Vasileiou, M.; Kyrgiakos, L.S.; Kleisiari, C.; Kleftodimos, G.; Vlontzos, G.; Belhouchette, H.; Pardalos, P.M. Transforming weed management in sustainable agriculture with artificial intelligence: A systematic literature review towards weed identification and deep learning. Crop. Prot. 2024, 176, 106522. [Google Scholar] [CrossRef]
- Rosle, R.; Che’ya, N.N.; Ang, Y.; Rahmat, F.; Wayayok, A.; Berahim, Z.; Ilahi, W.F.F.; Ismail, M.R.; Omar, M.H. Weed Detection in Rice Fields Using Remote Sensing Technique: A Review. Appl. Sci. 2021, 11, 10701. [Google Scholar] [CrossRef]
- Esposito, M.; Crimaldi, M.; Cirillo, V.; Sarghini, F.; Maggio, A. Drone and sensor technology for sustainable weed management: A review. Chem. Biol. Technol. Agric. 2021, 8, 18. [Google Scholar] [CrossRef]
- Chen, J.Y. UAV-guided navigation for ground robot tele-operation in a military reconnaissance environment. Ergonomics 2010, 53, 940–950. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, L.; Han, J.; Yu, J.; Huang, K. A near real-time deep learning approach for detecting rice phenology based on UAV images. Agric. For. Meteorol. 2020, 287, 107938. [Google Scholar] [CrossRef]
- Ashapure, A.; Jung, J.; Chang, A.; Oh, S.; Yeom, J.; Maeda, M.; Maeda, A.; Dube, N.; Landivar, J.; Hague, S.; et al. Developing a machine learning based cotton yield estimation framework using multi-temporal UAS data. ISPRS J. Photogramm. Remote Sens. 2020, 169, 180–194. [Google Scholar] [CrossRef]
- Alam Soeb, J.; Jubayer, F.; Tarin, T.A.; Al Mamun, M.R.; Ruhad, F.M.; Parven, A.; Mubarak, N.M.; Karri, S.L.; Meftaul, I.M. Tea leaf disease detection and identification based on YOLOv7 (YOLO-T). Sci. Rep. 2023, 13, 6078. [Google Scholar] [CrossRef]
- Ahmed, S.; Qiu, B.; Ahmad, F.; Kong, C.-W.; Xin, H. A State-of-the-Art Analysis of Obstacle Avoidance Methods from the Perspective of an Agricultural Sprayer UAV’s Operation Scenario. Agronomy 2021, 11, 1069. [Google Scholar] [CrossRef]
- Raeva, P.L.; Šedina, J.; Dlesk, A. Monitoring of crop fields using multispectral and thermal imagery from UAV. Eur. J. Remote Sens. 2018, 52, 192–201. [Google Scholar] [CrossRef]
- Wang, X.; Sun, H.; Long, Y.; Zheng, L.; Liu, H.; Li, M. Development of Visualization System for Agricultural UAV Crop Growth Information Collection. IFAC-PapersOnLine 2018, 51, 631–636. [Google Scholar] [CrossRef]
- Basiri, A.; Mariani, V.; Silano, G.; Aatif, M.; Iannelli, L.; Glielmo, L. A survey on the application of path-planning algorithms for multi-rotor UAVs in precision agriculture. J. Navig. 2022, 75, 364–383. [Google Scholar] [CrossRef]
- Thompson, L.J.; Puntel, L.A. Transforming Unmanned Aerial Vehicle (UAV) and Multispectral Sensor into a Practical Decision Support System for Precision Nitrogen Management in Corn. Remote Sens. 2020, 12, 1597. [Google Scholar] [CrossRef]
- Starý, K.; Jelínek, Z.; Kumhálová, J.; Chyba, J.; Balážová, K. Comparing RGB-based vegetation indices from UAV imageries to estimate hops canopy area. Agron. Res. 2020, 18, 2592–2601. [Google Scholar] [CrossRef]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef]
- Ge, H.; Ma, F.; Li, Z.; Du, C. Grain Yield Estimation in Rice Breeding Using Phenological Data and Vegetation Indices Derived from UAV Images. Agronomy 2021, 11, 2439. [Google Scholar] [CrossRef]
- Rozenberg, G.; Dias, J.L.C.S.; Anderson, W.M.; Sellers, B.A.; Boughton, R.K.; Piccolo, M.B.; Blank, L. Using a low-cost unmanned aerial vehicle for mapping giant smutgrass in bahiagrass pastures. Precis. Agric. 2022, 24, 971–985. [Google Scholar] [CrossRef]
- Banerjee, B.P.; Raval, S.; Cullen, P.J. UAV-hyperspectral imaging of spectrally complex environments. Int. J. Remote Sens. 2020, 41, 4136–4159. [Google Scholar] [CrossRef]
- Santos-Rufo, A.; Mesas-Carrascosa, F.-J.; García-Ferrer, A.; Meroño-Larriva, J.E. Wavelength Selection Method Based on Partial Least Square from Hyperspectral Unmanned Aerial Vehicle Orthomosaic of Irrigated Olive Orchards. Remote Sens. 2020, 12, 3426. [Google Scholar] [CrossRef]
- Li, Z.; Chen, Z.; Cheng, Q.; Duan, F.; Sui, R.; Huang, X.; Xu, H. UAV-Based Hyperspectral and Ensemble Machine Learning for Predicting Yield in Winter Wheat. Agronomy 2022, 12, 202. [Google Scholar] [CrossRef]
- Yao, L.; Wang, Q.; Yang, J.; Zhang, Y.; Zhu, Y.; Cao, W.; Ni, J. UAV-Borne Dual-Band Sensor Method for Monitoring Physiological Crop Status. Sensors 2019, 19, 816. [Google Scholar] [CrossRef]
- Stempliuk, S.; Menotti, D. Agriculture Multispectral Uav Image Registration Using Salient Features and Mutual Information. In Proceedings of the IGARSS 2020–2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 4108–4111. [Google Scholar]
- Hu, K.; Wang, Z.; Coleman, G.; Bender, A.; Yao, T.; Zeng, S.; Song, D.; Schumann, A.; Walsh, M. Deep learning techniques for in-crop weed recognition in large-scale grain production systems: A review. Precis. Agric. 2023, 25, 1–29. [Google Scholar] [CrossRef]
- Arsa, D.M.S.; Lee, J.; Won, O.; Kim, H. Korean Institute of Smart Media Deep Learning for Weeds’ Growth Point Detection based on U-Net. Smart Media J. 2022, 11, 94–103. [Google Scholar] [CrossRef]
- Hu, K.; Coleman, G.; Zeng, S.; Wang, Z.; Walsh, M. Graph weeds net: A graph-based deep learning method for weed recognition. Comput. Electron. Agric. 2020, 174, 105520. [Google Scholar] [CrossRef]
- Safonova, A.; Guirado, E.; Maglinets, Y.; Alcaraz-Segura, D.; Tabik, S. Olive Tree Biovolume from UAV Multi-Resolution Image Segmentation with Mask R-CNN. Sensors 2021, 21, 1617. [Google Scholar] [CrossRef]
- Kim, S.J.; Lee, J.S.; Kim, H.S. Deep learning-based Automatic Weed Detection on Onion Field. Smart Media J. 2018, 7, 16–21. [Google Scholar] [CrossRef]
- Chen, J.; Wang, H.; Zhang, H.; Luo, T.; Wei, D.; Long, T.; Wang, Z. Weed detection in sesame fields using a YOLO model with an enhanced attention mechanism and feature fusion. Comput. Electron. Agric. 2022, 202, 107412. [Google Scholar] [CrossRef]
- Haq, S.I.U.; Tahir, M.N.; Lan, Y. Weed Detection in Wheat Crops Using Image Analysis and Artificial Intelligence (AI). Appl. Sci. 2023, 13, 8840. [Google Scholar] [CrossRef]
- Punithavathi, R.; Rani, A.D.C.; Sughashini, K.R.; Kurangi, C.; Nirmala, M.; Ahmed, H.F.T.; Balamurugan, S.P. Computer Vision and Deep Learning-enabled Weed Detection Model for Precision Agriculture. Comput. Syst. Sci. Eng. 2023, 44, 2759–2774. [Google Scholar] [CrossRef]
- Guo, Z.; Goh, H.H.; Li, X.; Zhang, M.; Li, Y. WeedNet-R: A sugar beet field weed detection algorithm based on enhanced RetinaNet and context semantic fusion. Front. Plant Sci. 2023, 14, 1226329. [Google Scholar] [CrossRef]
- Alom, Z.; Yakopcic, C.; Hasan, M.; Taha, T.M.; Asari, V.K. Recurrent residual U-Net for medical image segmentation. J. Med. Imaging 2019, 6, 014006. [Google Scholar] [CrossRef]
- Shweta Kulkarni, S.A.A. IOT Based Weed Detection Using Image Processing and CNN. Int. J. Eng. Appl. Sci. Technol. 2019, 4, 606–609. [Google Scholar]
- Khan, A.; Ilyas, T.; Umraiz, M.; Mannan, Z.I.; Kim, H. CED-Net: Crops and Weeds Segmentation for Smart Farming Using a Small Cascaded Encoder-Decoder Architecture. Electronics 2020, 9, 1602. [Google Scholar] [CrossRef]
- Fawakherji, M. Crop and Weed Classication Using Pixel-wise Segmentation on Ground and Aerial Images. Int. J. Robot. Comput. 2020, 2, 39–57. [Google Scholar] [CrossRef]
- Champ, J.; Mora-Fallas, A.; Goëau, H.; Mata-Montero, E.; Bonnet, P.; Joly, A. Instance segmentation for the fine detection of crop and weed plants by precision agricultural robots. Appl. Plant Sci. 2020, 8, e11373. [Google Scholar] [CrossRef]
- Moazzam, S.I.; Khan, U.S.; Qureshi, W.S.; Tiwana, M.I.; Rashid, N.; Alasmary, W.S.; Iqbal, J.; Hamza, A. A Patch-Image Based Classification Approach for Detection of Weeds in Sugar Beet Crop. IEEE Access 2021, 9, 121698–121715. [Google Scholar] [CrossRef]
- Fathipoor, H.; Shah-Hosseini, R.; Arefi, H. Crop and Weed Segmentation on Ground-Based Images Using Deep Convolutional Neural Network. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, X-4/W1-202, 195–200. [Google Scholar] [CrossRef]
- Panda, B.; Mishra, M.K.; Mishra, B.S.P.; Tiwari, A.K. Parametric Analysis on Crop/Weed Classification via Optimized Convolutional Neural Network. In Proceedings of the 2021 Third International Conference on Intelligent Communication Technologies and Virtual Mobile Networks (ICICV), Tirunelveli, India, 4–6 February 2021; pp. 1477–1484. [Google Scholar]
- Benchallal, F.; Hafiane, A.; Ragot, N.; Canals, R. ConvNeXt based semi-supervised approach with consistency regularization for weeds classification. Expert. Syst. Appl. 2024, 239, 122222. [Google Scholar] [CrossRef]
- Olsen, A.; Konovalov, D.A.; Philippa, B.; Ridd, P.; Wood, J.C.; Johns, J.; Banks, W.; Girgenti, B.; Kenny, O.; Whinney, J.; et al. DeepWeeds: A Multiclass Weed Species Image Dataset for Deep Learning. Sci. Rep. 2019, 9, 2058. [Google Scholar] [CrossRef] [PubMed]
- Abdulsalam, M.; Aouf, N. Deep Weed Detector/Classifier Network for Precision Agriculture. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphaël, France, 15–18 September 2020; pp. 1087–1092. [Google Scholar]
- Vypirailenko, D.; Kiseleva, E.; Shadrin, D.; Pukalchik, M. Deep learning techniques for enhancement of weeds growth clas-sification. In Proceedings of the 2021 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Virtual, 17–20 May 2021; pp. 1–6. [Google Scholar]
- Mounashree, J.P.; Sushmitha, N.S.; Usha, B.S.; Anupama Shivamurthy, B.G. Automated Weed Removal System Using Convolutional Neural Network. Int. J. Eng. Appl. Sci. Technol. 2021, 6, 231–235. [Google Scholar]
- Makanapura, N.; Sujatha, C.; Patil, P.R.; Desai, P. Classification of plant seedlings using deep convolutional neural network architectures. J. Physics: Conf. Ser. 2022, 2161, 012006. [Google Scholar] [CrossRef]
- Tao, T.; Wei, X. A hybrid CNN–SVM classifier for weed recognition in winter rape field. Plant Methods 2022, 18, 29. [Google Scholar] [CrossRef]
- Sudars, K.; Jasko, J.; Namatevs, I.; Ozola, L.; Badaukis, N. Dataset of annotated food crops and weed images for robotic computer vision control. Data Brief. 2020, 31, 105833. [Google Scholar] [CrossRef]
- Aggarwal, V.; Ahmad, A.; Etienne, A.; Saraswat, D. 4Weed Dataset: Annotated Imagery Weeds Dataset. arXiv 2022, arXiv:2204.00080. [Google Scholar] [CrossRef]
- Bhosle, K.; Musande, V. Evaluation of CNN model by comparing with convolutional autoencoder and deep neural network for crop classification on hyperspectral imagery. Geocarto Int. 2020, 37, 813–827. [Google Scholar] [CrossRef]
- Genze, N.; Ajekwe, R.; Güreli, Z.; Haselbeck, F.; Grieb, M.; Grimm, D.G. Deep learning-based early weed segmentation using motion blurred UAV images of sorghum fields. Comput. Electron. Agric. 2022, 202, 168. [Google Scholar] [CrossRef]
- Al-Badri, A.H.; Ismail, N.A.; Al-Dulaimi, K.; Salman, G.A.; Khan, A.R.; Al-Sabaawi, A.; Salam, S.H. Classification of weed using machine learning techniques: A review—Challenges, current and future potential techniques. J. Plant Dis. Prot. 2022, 129, 745–768. [Google Scholar] [CrossRef]
- Fraccaro, P.; Butt, J.; Edwards, B.; Freckleton, R.P.; Childs, D.Z.; Reusch, K.; Comont, D. A Deep Learning Application to Map Weed Spatial Extent from Unmanned Aerial Vehicles Imagery. Remote Sens. 2022, 14, 4197. [Google Scholar] [CrossRef]
- Bah, M.D.; Hafiane, A.; Canals, R. Deep Learning with Unsupervised Data Labeling for Weed Detection in Line Crops in UAV Images. Remote Sens. 2018, 10, 1690. [Google Scholar] [CrossRef]
- Veeranampalayam Sivakumar, A.N.; Li, J.; Scott, S.; Psota, E.; Jhala, A.J.; Luck, J.D.; Shi, Y. Comparison of Object Detection and Patch-Based Classification Deep Learning Models on Mid- to Late-Season Weed Detection in UAV Imagery. Remote Sens. 2020, 12, 2136. [Google Scholar] [CrossRef]
- Reedha, R.; Dericquebourg, E.; Canals, R.; Hafiane, A. Transformer Neural Network for Weed and Crop Classification of High Resolution UAV Images. Remote Sens. 2022, 14, 592. [Google Scholar] [CrossRef]
- Shahi, T.B.; Xu, C.-Y.; Neupane, A.; Guo, W. Recent Advances in Crop Disease Detection Using UAV and Deep Learning Techniques. Remote Sens. 2023, 15, 2450. [Google Scholar] [CrossRef]
- Genze, N.; Wirth, M.; Schreiner, C.; Ajekwe, R.; Grieb, M.; Grimm, D.G. Improved weed segmentation in UAV imagery of sorghum fields with a combined deblurring segmentation model. Plant Methods 2023, 19, 87. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhang, W.; Zhou, H.; Yu, C.; Li, Q. Weed detection in soybean fields using improved YOLOv7 and evaluating herbicide reduction efficacy. Front. Plant Sci. 2024, 14, 1284338. [Google Scholar] [CrossRef] [PubMed]
- Dos Santos Ferreira, A.; Freitas, D.M.; da Silva, G.G.; Pistori, H.; Folhes, M.T. Weed detection in soybean crops using ConvNets. Comput. Electron. Agric. 2017, 143, 314–324. [Google Scholar] [CrossRef]
- Xu, B.; Fan, J.; Chao, J.; Arsenijevic, N.; Werle, R.; Zhang, Z. Instance segmentation method for weed detection using UAV imagery in soybean fields. Comput. Electron. Agric. 2023, 211, 107994. [Google Scholar] [CrossRef]
- Zhao, J.; Yan, J.; Xue, T.; Wang, S.; Qiu, X.; Yao, X.; Tian, Y.; Zhu, Y.; Cao, W.; Zhang, X. A deep learning method for oriented and small wheat spike detection (OSWSDet) in UAV images. Comput. Electron. Agric. 2022, 198, 107087. [Google Scholar] [CrossRef]
- Zou, K.; Liao, Q.; Zhang, F.; Che, X.; Zhang, C. A segmentation network for smart weed management in wheat fields. Comput. Electron. Agric. 2022, 202, 107303. [Google Scholar] [CrossRef]
- Anderegg, J.; Tschurr, F.; Kirchgessner, N.; Treier, S.; Schmucki, M.; Streit, B.; Walter, A. On-farm evaluation of UAV-based aerial imagery for season-long weed monitoring under contrasting management and pedoclimatic conditions in wheat. Comput. Electron. Agric. 2023, 204, 107558. [Google Scholar] [CrossRef]
- Sapkota, B.B.; Popescu, S.; Rajan, N.; Leon, R.G.; Reberg-Horton, C.; Mirsky, S.; Bagavathiannan, M.V. Use of synthetic images for training a deep learning model for weed detection and biomass estimation in cotton. Sci. Rep. 2022, 12, 19580. [Google Scholar] [CrossRef]
- Cai, Y.; Zeng, F.; Xiao, J.; Ai, W.; Kang, G.; Lin, Y.; Cai, Z.; Shi, H.; Zhong, S.; Yue, X. Attention-aided semantic segmentation network for weed identification in pineapple field. Comput. Electron. Agric. 2023, 210, 107881. [Google Scholar] [CrossRef]
- Wang, S.; Han, Y.; Chen, J.; He, X.; Zhang, Z.; Liu, X.; Zhang, K. Weed Density Extraction Based on Few-Shot Learning Through UAV Remote Sensing RGB and Multispectral Images in Ecological Irrigation Area. Front. Plant Sci. 2022, 12, 735230. [Google Scholar] [CrossRef] [PubMed]
- Lam, O.H.Y.; Dogotari, M.; Prüm, M.; Vithlani, H.N.; Roers, C.; Melville, B.; Zimmer, F.; Becker, R. An open source workflow for weed mapping in native grassland using unmanned aerial vehicle: Using Rumex obtusifolius as a case study. Eur. J. Remote Sens. 2020, 54, 71–88. [Google Scholar] [CrossRef]
- Rozenberg, G.; Kent, R.; Blank, L. Consumer-grade UAV utilized for detecting and analyzing late-season weed spatial distribution patterns in commercial onion fields. Precis. Agric. 2021, 22, 1317–1332. [Google Scholar] [CrossRef]
- de Camargo, T.; Schirrmann, M.; Landwehr, N.; Dammer, K.-H.; Pflanz, M. Optimized Deep Learning Model as a Basis for Fast UAV Mapping of Weed Species in Winter Wheat Crops. Remote Sens. 2021, 13, 1704. [Google Scholar] [CrossRef]
- Mohidem, N.A.; Che’ya, N.N.; Juraimi, A.S.; Ilahi, W.F.F.; Roslim, M.H.M.; Sulaiman, N.; Saberioon, M.; Noor, N.M. How Can Unmanned Aerial Vehicles Be Used for Detecting Weeds in Agricultural Fields? Agriculture 2021, 11, 1004. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; Mesas-Carrascosa, F.J.; Jiménez-Brenes, F.M.; de Castro, A.I.; López-Granados, F. Early Detection of Broad-Leaved and Grass Weeds in Wide Row Crops Using Artificial Neural Networks and UAV Imagery. Agronomy 2021, 11, 749. [Google Scholar] [CrossRef]
- Zou, K.; Chen, X.; Zhang, F.; Zhou, H.; Zhang, C. A Field Weed Density Evaluation Method Based on UAV Imaging and Modified U-Net. Remote Sens. 2021, 13, 310. [Google Scholar] [CrossRef]
- Khoshboresh-Masouleh, M.; Akhoondzadeh, M. Improving weed segmentation in sugar beet fields using potentials of multispectral unmanned aerial vehicle images and lightweight deep learning. J. Appl. Remote Sens. 2021, 15, 034510. [Google Scholar] [CrossRef]
- Gallo, I.; Rehman, A.U.; Dehkordi, R.H.; Landro, N.; La Grassa, R.; Boschetti, M. Deep Object Detection of Crop Weeds: Performance of YOLOv7 on a Real Case Dataset from UAV Images. Remote Sens. 2023, 15, 539. [Google Scholar] [CrossRef]
- Huang, H.; Lan, Y.; Yang, A.; Zhang, Y.; Wen, S.; Deng, J. Deep learning versus Object-based Image Analysis (OBIA) in weed mapping of UAV imagery. Int. J. Remote Sens. 2020, 41, 3446–3479. [Google Scholar] [CrossRef]
- Gao, J.; Liao, W.; Nuyttens, D.; Lootens, P.; Vangeyte, J.; Pižurica, A.; He, Y.; Pieters, J.G. Fusion of pixel and object-based features for weed mapping using unmanned aerial vehicle imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 43–53. [Google Scholar] [CrossRef]
- Feng, Q.; Yang, J.; Liu, Y.; Ou, C.; Zhu, D.; Niu, B.; Liu, J.; Li, B. Multi-Temporal Unmanned Aerial Vehicle Remote Sensing for Vegetable Mapping Using an Attention-Based Recurrent Convolutional Neural Network. Remote Sens. 2020, 12, 1668. [Google Scholar] [CrossRef]
- Basso, M.; Stocchero, D.; Henriques, R.V.B.; Vian, A.L.; Bredemeier, C.; Konzen, A.A.; De Freitas, E.P. Proposal for an Embedded System Architecture Using a GNDVI Algorithm to Support UAV-Based Agrochemical Spraying. Sensors 2019, 19, 5397. [Google Scholar] [CrossRef]
- Liu, B.; Bruch, R. Weed Detection for Selective Spraying: A Review. Curr. Robot. Rep. 2020, 1, 19–26. [Google Scholar] [CrossRef]
- Devi, G.; Sowmiya, N.; Yasoda, K.; Muthulakshmi, K.; Balasubramanian, K. Review on Application of Drones for Crop Health Monitoring and Spraying Pesticides and Fertilizer. J. Crit. Rev. 2020, 7, 667–672. [Google Scholar] [CrossRef]
- Yu, J.; Schumann, A.W.; Sharpe, S.M.; Li, X.; Boyd, N.S. Detection of grassy weeds in bermudagrass with deep convolutional neural networks. Weed Sci. 2020, 68, 545–552. [Google Scholar] [CrossRef]
- Yan, X.; Zhou, Y.; Liu, X.; Yang, D.; Yuan, H. Minimizing Occupational Exposure to Pesticide and Increasing Control Efficacy of Pests by Unmanned Aerial Vehicle Application on Cowpea. Appl. Sci. 2021, 11, 9579. [Google Scholar] [CrossRef]
- Wu, Z.; Chen, Y.; Zhao, B.; Kang, X.; Ding, Y. Review of Weed Detection Methods Based on Computer Vision. Sensors 2021, 21, 3647. [Google Scholar] [CrossRef] [PubMed]
- Salazar-Gomez, A.; Darbyshire, M.; Gao, J.; Sklar, E.I.; Parsons, S. Beyond Map: Towards practical object detection for weed spraying in precision agriculture. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 9232–9238. [Google Scholar]
- Jin, X.; Bagavathiannan, M.; Maity, A.; Chen, Y.; Yu, J. Deep learning for detecting herbicide weed control spectrum in turfgrass. Plant Methods 2022, 18, 94. [Google Scholar] [CrossRef] [PubMed]
- Hanif, A.S.; Han, X.; Yu, S.-H. Independent Control Spraying System for UAV-Based Precise Variable Sprayer: A Review. Drones 2022, 6, 383. [Google Scholar] [CrossRef]
- Chen, Y.; Qi, H.; Li, G.; Lan, Y. Weed control effect of unmanned aerial vehicle (UAV) application in wheat field. Int. J. Precis. Agric. Aviat. 2018, 1, 25–31. [Google Scholar] [CrossRef]
- Chen, H.; Lan, Y.; Fritz, B.K.; Hoffmann, W.C.; Liu, S. Review of agricultural spraying technologies for plant protection using unmanned aerial vehicle (UAV). Int. J. Agric. Biol. Eng. 2021, 14, 38–49. [Google Scholar] [CrossRef]
- Biglia, A.; Grella, M.; Bloise, N.; Comba, L.; Mozzanini, E.; Sopegno, A.; Pittarello, M.; Dicembrini, E.; Alcatrão, L.E.; Guglieri, G.; et al. UAV-spray application in vineyards: Flight modes and spray system adjustment effects on canopy deposit, coverage, and off-target losses. Sci. Total. Environ. 2022, 845, 157292. [Google Scholar] [CrossRef]
- Rasmussen, J.; Azim, S.; Nielsen, J. Pre-harvest weed mapping of Cirsium arvense L. based on free satellite imagery—The importance of weed aggregation and image resolution. Eur. J. Agron. 2021, 130, 126373. [Google Scholar] [CrossRef]
- Eide, A.; Koparan, C.; Zhang, Y.; Ostlie, M.; Howatt, K.; Sun, X. UAV-Assisted Thermal Infrared and Multispectral Imaging of Weed Canopies for Glyphosate Resistance Detection. Remote Sens. 2021, 13, 4606. [Google Scholar] [CrossRef]
- Raptis, E.K.; Krestenitis, M.; Egglezos, K.; Kypris, O.; Ioannidis, K.; Doitsidis, L.; Kapoutsis, A.C.; Vrochidis, S.; Kompatsiaris, I.; Kosmatopoulos, E.B. End-to-end Precision Agriculture UAV-Based Functionalities Tailored to Field Characteristics. J. Intell. Robot. Syst. 2023, 107, 23. [Google Scholar] [CrossRef]
- Wang, P.; Tang, Y.; Luo, F.; Wang, L.; Li, C.; Niu, Q.; Li, H. Weed25: A deep learning dataset for weed identification. Front. Plant Sci. 2022, 13, 1053329. [Google Scholar] [CrossRef] [PubMed]
- Krestenitis, M.; Raptis, E.K.; Kapoutsis, A.C.; Ioannidis, K.; Kosmatopoulos, E.B.; Vrochidis, S.; Kompatsiaris, I. CoFly-WeedDB: A UAV image dataset for weed detection and species identification. Data Brief. 2022, 45, 108575. [Google Scholar] [CrossRef]
- Gupta, S.K.; Yadav, S.K.; Soni, S.K.; Shanker, U.; Singh, P.K. Multiclass weed identification using semantic segmentation: An automated approach for precision agriculture. Ecol. Inform. 2023, 78, 102336. [Google Scholar] [CrossRef]
- Che’Ya, N.N.; Dunwoody, E.; Gupta, M. Assessment of Weed Classification Using Hyperspectral Reflectance and Optimal Multispectral UAV Imagery. Agronomy 2021, 11, 1435. [Google Scholar] [CrossRef]
- Xia, F.; Quan, L.; Lou, Z.; Sun, D.; Li, H.; Lv, X. Identification and Comprehensive Evaluation of Resistant Weeds Using Unmanned Aerial Vehicle-Based Multispectral Imagery. Front. Plant Sci. 2022, 13, 938604. [Google Scholar] [CrossRef]
- Costello, B.; Osunkoya, O.O.; Sandino, J.; Marinic, W.; Trotter, P.; Shi, B.; Gonzalez, F.; Dhileepan, K. Detection of Parthenium Weed (Parthenium hysterophorus L.) and Its Growth Stages Using Artificial Intelligence. Agriculture 2022, 12, 1838. [Google Scholar] [CrossRef]
- Rajakani, M.; Kavitha, R.J. Invasive weed optimization with deep transfer learning for multispectral image classification model. Multimedia Tools Appl. 2023, 2023, 1–16. [Google Scholar] [CrossRef]
- Sulaiman, N.; Che’ya, N.N.; Roslim, M.H.M.; Juraimi, A.S.; Noor, N.M.; Ilahi, W.F.F. The Application of Hyperspectral Remote Sensing Imagery (HRSI) for Weed Detection Analysis in Rice Fields: A Review. Appl. Sci. 2022, 12, 2570. [Google Scholar] [CrossRef]
- Deng, J.; Zhong, Z.; Huang, H.; Lan, Y.; Han, Y.; Zhang, Y. Lightweight Semantic Segmentation Network for Real-Time Weed Mapping Using Unmanned Aerial Vehicles. Appl. Sci. 2020, 10, 7132. [Google Scholar] [CrossRef]
- Chew, R.; Rineer, J.; Beach, R.; O’neil, M.; Ujeneza, N.; Lapidus, D.; Miano, T.; Hegarty-Craver, M.; Polly, J.; Temple, D.S. Deep Neural Networks and Transfer Learning for Food Crop Identification in UAV Images. Drones 2020, 4, 7. [Google Scholar] [CrossRef]
- Li, Y.; Qin, F.; He, Y.; Liu, B.; Liu, C.; Pu, X.; Wan, F.; Qiao, X.; Qian, W. The effect of season on Spartina alterniflora identification and monitoring. Front. Environ. Sci. 2022, 10, 1044839. [Google Scholar] [CrossRef]
- Qiao, X.; Li, Y.-Z.; Su, G.-Y.; Tian, H.-K.; Zhang, S.; Sun, Z.-Y.; Yang, L.; Wan, F.-H.; Qian, W.-Q. MmNet: Identifying Mikania micrantha Kunth in the wild via a deep Convolutional Neural Network. J. Integr. Agric. 2020, 19, 1292–1300. [Google Scholar] [CrossRef]
- Dutta, A.K.; Albagory, Y.; Sait, A.R.W.; Keshta, I.M. Autonomous Unmanned Aerial Vehicles Based Decision Support System for Weed Management. Comput. Mater. Contin. 2022, 73, 899–915. [Google Scholar] [CrossRef]
- He, M.-X.; Hao, P.; Xin, Y.-Z. A Robust Method for Wheatear Detection Using UAV in Natural Scenes. IEEE Access 2020, 8, 189043–189053. [Google Scholar] [CrossRef]
- Haq, M.A. CNN Based Automated Weed Detection System Using UAV Imagery. Comput. Syst. Sci. Eng. 2022, 42, 837–849. [Google Scholar] [CrossRef]
- Thomas, L.-F.; Änäkkälä, M.; Lajunen, A. Weakly Supervised Perennial Weed Detection in a Barley Field. Remote Sens. 2023, 15, 2877. [Google Scholar] [CrossRef]
- Bah, M.D.; Hafiane, A.; Canals, R. CRowNet: Deep Network for Crop Row Detection in UAV Images. IEEE Access 2019, 8, 5189–5200. [Google Scholar] [CrossRef]
- Anand, T.; Sinha, S.; Mandal, M.; Chamola, V.; Yu, F.R. AgriSegNet: Deep Aerial Semantic Segmentation Framework for IoT-Assisted Precision Agriculture. IEEE Sens. J. 2021, 21, 17581–17590. [Google Scholar] [CrossRef]
- Aeberli, A.; Johansen, K.; Robson, A.; Lamb, D.W.; Phinn, S. Detection of Banana Plants Using Multi-Temporal Multispectral UAV Imagery. Remote Sens. 2021, 13, 2123. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, X.; Jin, S.; Zhang, R. Simultaneous Navigation and Radio Mapping for Cellular-Connected UAV With Deep Reinforcement Learning. IEEE Trans. Wirel. Commun. 2021, 20, 4205–4220. [Google Scholar] [CrossRef]
- Zhang, W.; Miao, Z.; Li, N.; He, C.; Sun, T. Review of Current Robotic Approaches for Precision Weed Management. Curr. Robot. Rep. 2022, 3, 139–151. [Google Scholar] [CrossRef]
| Type | Remote Sensing Technologies | Advantages | Disadvantages |
|---|---|---|---|
| Space remote sensing | Spaceship | Widest coverage High spectral resolution Flexibility | High cost High technical difficulty High risk |
| Satellite | Wider coverage High spectral resolution High data accuracy | Complex data processing Sensitive to weather changes High cost Data not available all the time | |
| Aerial remote sensing | Aircraft | Wide coverage High spectral resolution | Sensitive to weather changes High cost Low spatial resolution |
| UAV | Low cost High spectral resolution High spatial resolution Data available all the time Not sensitive to clouds Accurate position Flexibility Real-time acquisition | Medium coverage Short endurance Sensitive to weather changes | |
| Ground remote sensing | vehicle | High spatial resolution | High cost Narrow coverage Destruct plants Soil compaction |
| Handheld device | Camera | Low cost Flexibility High resolution | Narrow coverage Unable to transmit in real-time |
| Type | Load | Advantages | Disadvantages |
|---|---|---|---|
| Fixed-wing UAV | 1.0~10 | Long endurance Large load Fast speed Strong wind resistance Simple structure Low cost | Unable to hover Excessive speed affects the image quality Demanding site High operation requirements |
| Multi-rotor UAV | 0.8~8 | Simple structure Low requirements for Takeoff and landing sites Flight stabilization Fixed-point takeoff Fixed-point landing | Short endurance Slow flight Susceptible to interference Small load Difficult to operate |
| VTOL UAV | 1.0~15 | Vertical takeoff Vertical landing Spot hover Large load Fast speed Low requirements for Takeoff and landing sites Flexibility | Complex structure High operation requirements Poor stability Susceptible to interference Difficulty in maintenance |
| Ref. | Crop Species | Task | Location | Model | F1 Score | Precision | mAP | Acc | Recall | Other Metric | Dataset | Image | Volume |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [46] | Sesame/Weed | Object detection | Nanning, Guangxi, China | YOLO-sesame | 92% | 90.30% | 96.16% | 94.53% | FPS: 36.8 | Self-made dataset | RGB | 1300 | |
| [47] | Wheat/Weed | Object detection | PMAS Arid Agriculture University | YOLOv4-Tiny | 92% | 89% | 97% | 96% | GFLOPs: 6.787 | Self-made dataset | RGB | 6000 | |
| [48] | Plant/Weed | Object detection | Faster RCNN | 98.34% | 98.33% | Sensitivity: 98.98S pecificity: 98.92 | Benchmark dataset [65] | RGB | 1118 | ||||
| [51] | Crop/Weed | Image segmentation | Indian | CNN | 85% | RGB | 250 | ||||||
| [52] | Crop/Weed | Image segmentation | CED-Net | 90.97% | 55.7% | MIoU:0.8344 Sensitivity:0.8968 | Public dataset | RGB | 1156 | ||||
| [53] | Crop/Weed | Image segmentation | VGG-UNet | 99% | 87% | 94.85% | MioU:0.91 | Public dataset | RGB/ multispectral | 10,985 | |||
| [54] | Crop/Weed | Image segmentation | Montoldre, Central France | Mask R-CNN | 85% | Self-made dataset | RGB | 104 | |||||
| [55] | Beet/Weed | Image segmentation | VGG-Beet | 92.4% | Public dataset | RGB | 1033 | ||||||
| [56] | Carrot/weed | Image segmentation | U-Net++ | 89.20% | 88.84% | 94.02% | 89.56% | IoU:81.31% | carrot-weed | RGB | 39 | ||
| [58] | Crop/Weed | Image classification | Eight locations, Northern Australia | ConvNeXt | 90.37% | 92.33% | FPS: 18.7/s | DeepWeeds 4-Weeds [66] | RGB | 18,127 | |||
| [59] | Crop/Weed | Image classification | Eight locations, Northern Australia | Inception-v3 ResNet-50 | 95.7% | 95.1%95.7% | DeepWeeds | RGB | 17,509 | ||||
| [60] | Corn/Weed | Image classification | London, United Kingdom | ResNet-50 +YOLO v2 | 94% | 90% | Self-made dataset | RGB | 1000 | ||||
| [61] | Weed | Image classification | Moscow, Russia | DenseNet169 | 93.45% | Leaf counting | RGB | 9649 | |||||
| [64] | Winter rape/Weed | Image classification | Zhenjiang City, Jiangsu province, China | VGG+SVM | 92.1% | Self-made dataset | RGB | 1500 |
| Datasets | Volume | Address | Recommendation |
|---|---|---|---|
| Weed25 | 14,035 | https://pan.baidu.com/s/1rnUoDm7IxxmX1n1LmtXNXw (accessed on 25 October 2023) password: rn5h | Weed classification |
| Annotated food crops and weed images | 1118 | http://creativecommons.org/licenses/by/4.0/ (accessed on 11 June 2020) | Weed detection |
| Crop line dataset | 5534 | doi:10.3390/rs10111690 (accessed on 17 July 2023) | Weed classification |
| CoFly-WeedDB | 201 | https://zenodo.org/records/6697343#.YrQpwHhByV4 (accessed on 5 September 2022) | Weed detection and Image segmentation |
| Multiclass Weeds Dataset | 7872 | https://figshare.com/s/934923139007f467c47e (accessed on 15 November 2023) | Image Segmentation |
| CWD30 dataset (weed) | 219,770 | https://arxiv.org/abs/2305.10084 (accessed on 17 May 2023) | Weed classification |
| Weed dataset | 7200 | https://gitee.com/Monster7/weed-datase/ (accessed on 26 February 2020) | Weed classification Weed detection |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Yu, F.; Zhang, Q.; Wang, M.; Yu, J.; Tan, Y. Advancements of UAV and Deep Learning Technologies for Weed Management in Farmland. Agronomy 2024, 14, 494. https://doi.org/10.3390/agronomy14030494
Zhang J, Yu F, Zhang Q, Wang M, Yu J, Tan Y. Advancements of UAV and Deep Learning Technologies for Weed Management in Farmland. Agronomy. 2024; 14(3):494. https://doi.org/10.3390/agronomy14030494
Chicago/Turabian StyleZhang, Jinmeng, Feng Yu, Qian Zhang, Ming Wang, Jinying Yu, and Yarong Tan. 2024. "Advancements of UAV and Deep Learning Technologies for Weed Management in Farmland" Agronomy 14, no. 3: 494. https://doi.org/10.3390/agronomy14030494
APA StyleZhang, J., Yu, F., Zhang, Q., Wang, M., Yu, J., & Tan, Y. (2024). Advancements of UAV and Deep Learning Technologies for Weed Management in Farmland. Agronomy, 14(3), 494. https://doi.org/10.3390/agronomy14030494