
Design of Chili Field Navigation System Based on Multi-Sensor and Optimized TEB Algorithm
 , , , , ,
, , , , , 
Abstract
1. Introduction
- Using LiDAR scanning to generate an accurate map of the chili pepper field.
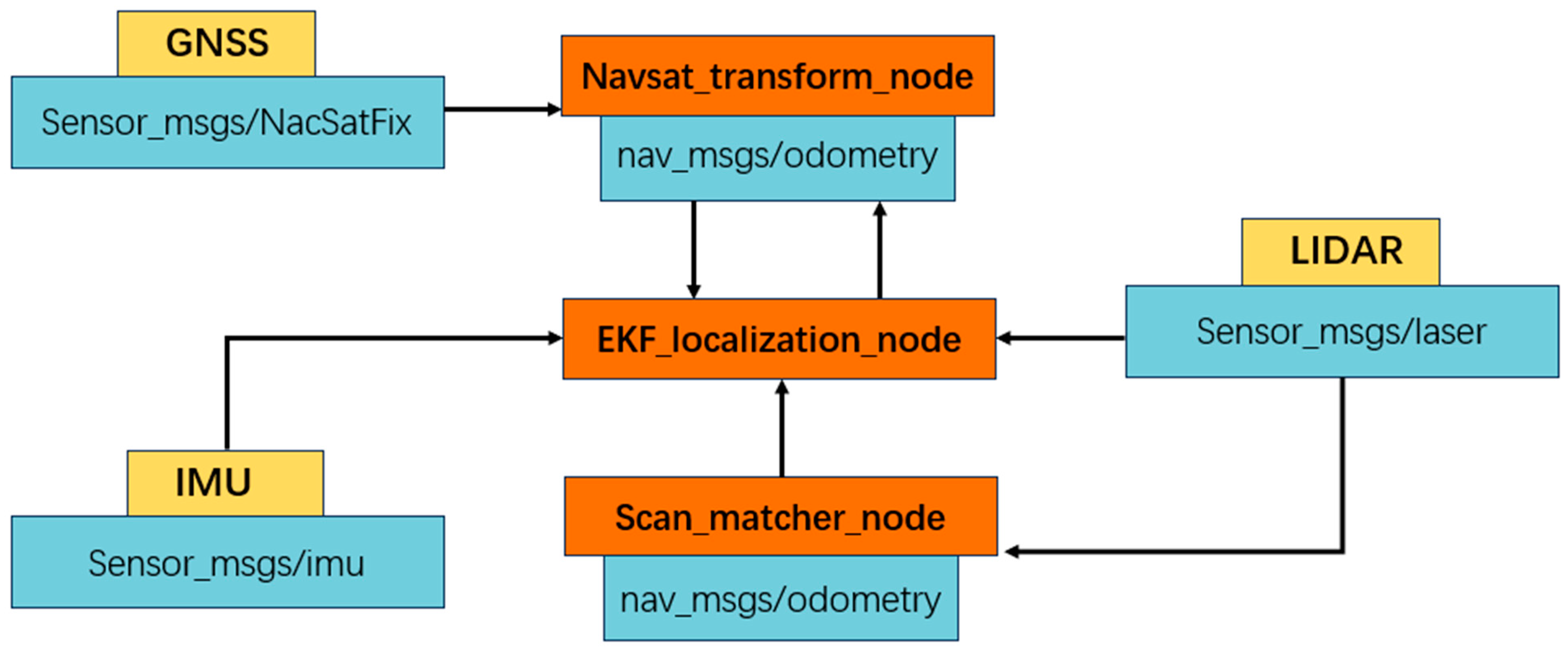
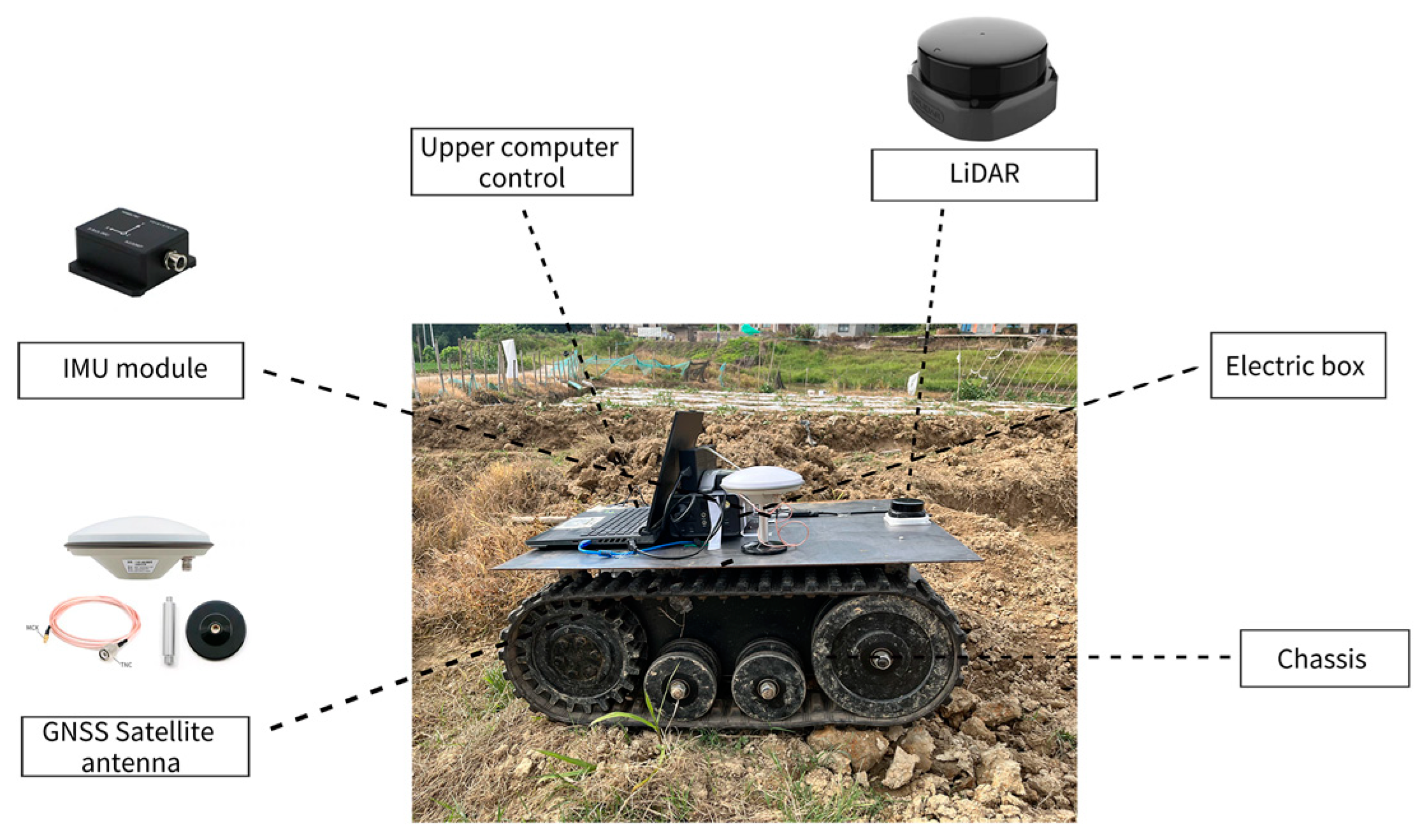
- Implementing an EKF to achieve data fusion of LiDAR, the IMU, and the GNSS, enabling real-time acquisition of environmental and self-localization data, thereby achieving precise localization with multi-sensor collaboration.
- Optimizing the TEB algorithm and integrating the A algorithm with the TEB algorithm for reasonable path planning in narrow fields and enabling autonomous obstacle avoidance and navigation through narrow, unattended fields to complete automatic cruising in chili pepper fields.
- Validating the accuracy and feasibility of the multi-sensor fusion and optimizing the TEB algorithm through experimental trials.
2. Materials and Methods
2.1. Measurement of Chili Fields
2.2. Multi-Sensor Data Fusion Positioning
2.2.1. Positioning Overall Scheme
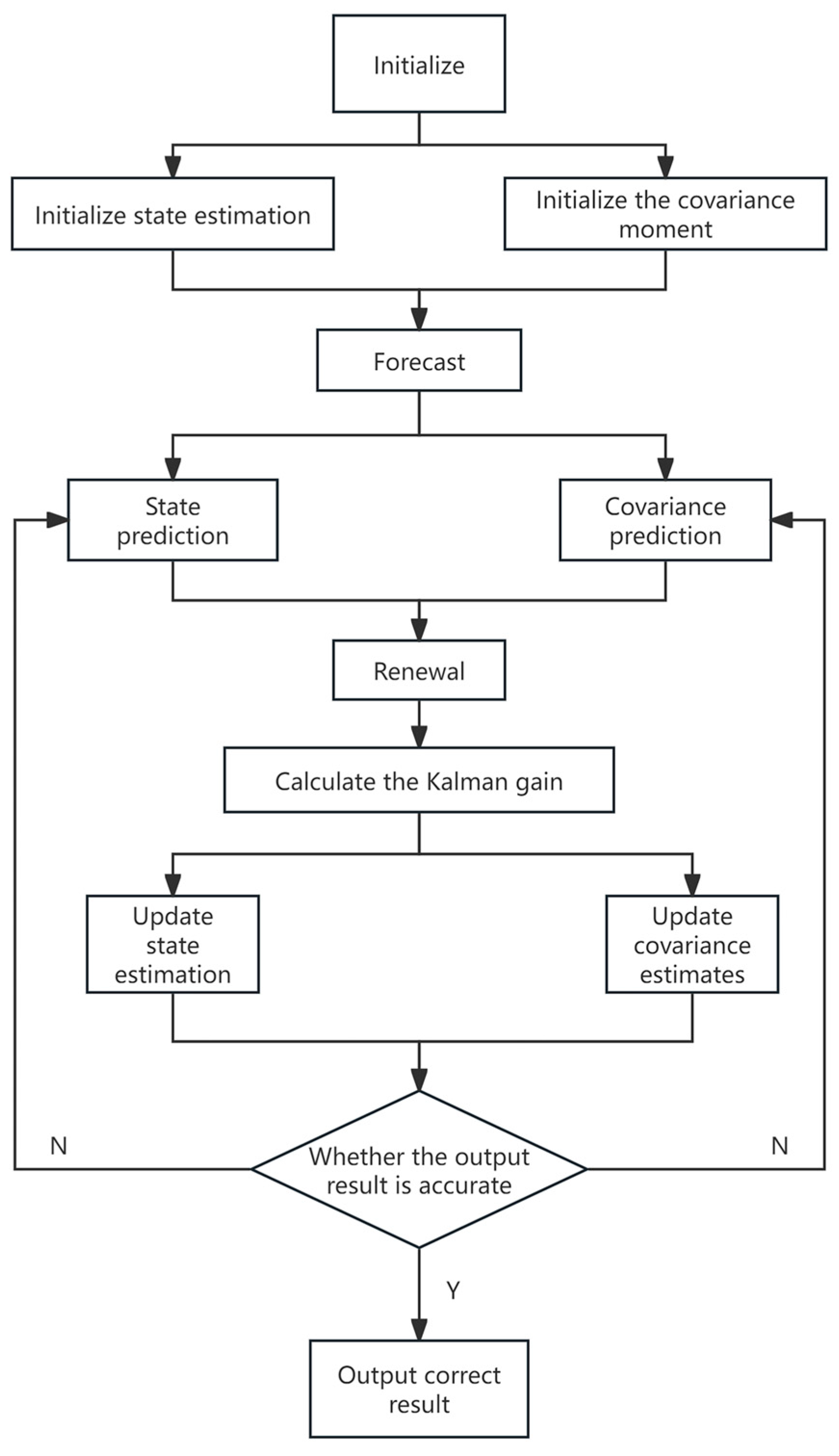
2.2.2. Data Fusion Analysis
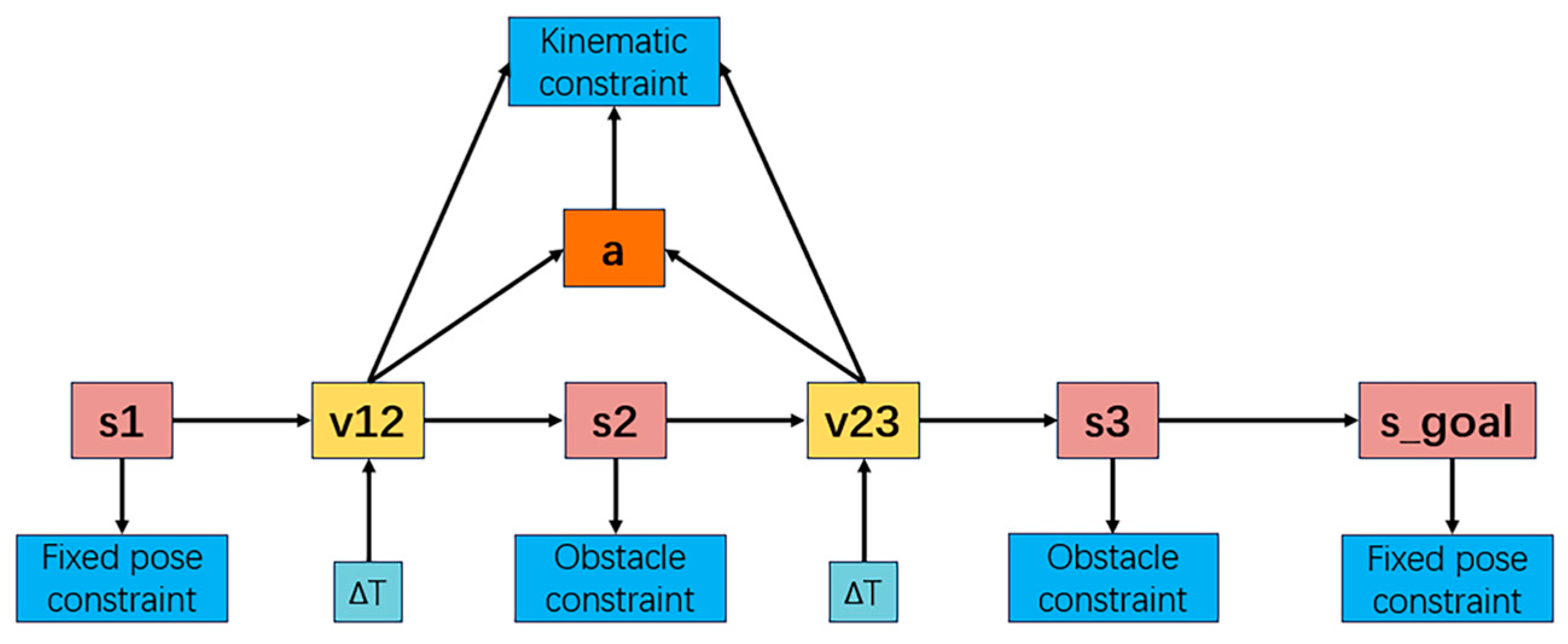
2.3. Optimize TEB Algorithm Construction and Analysis
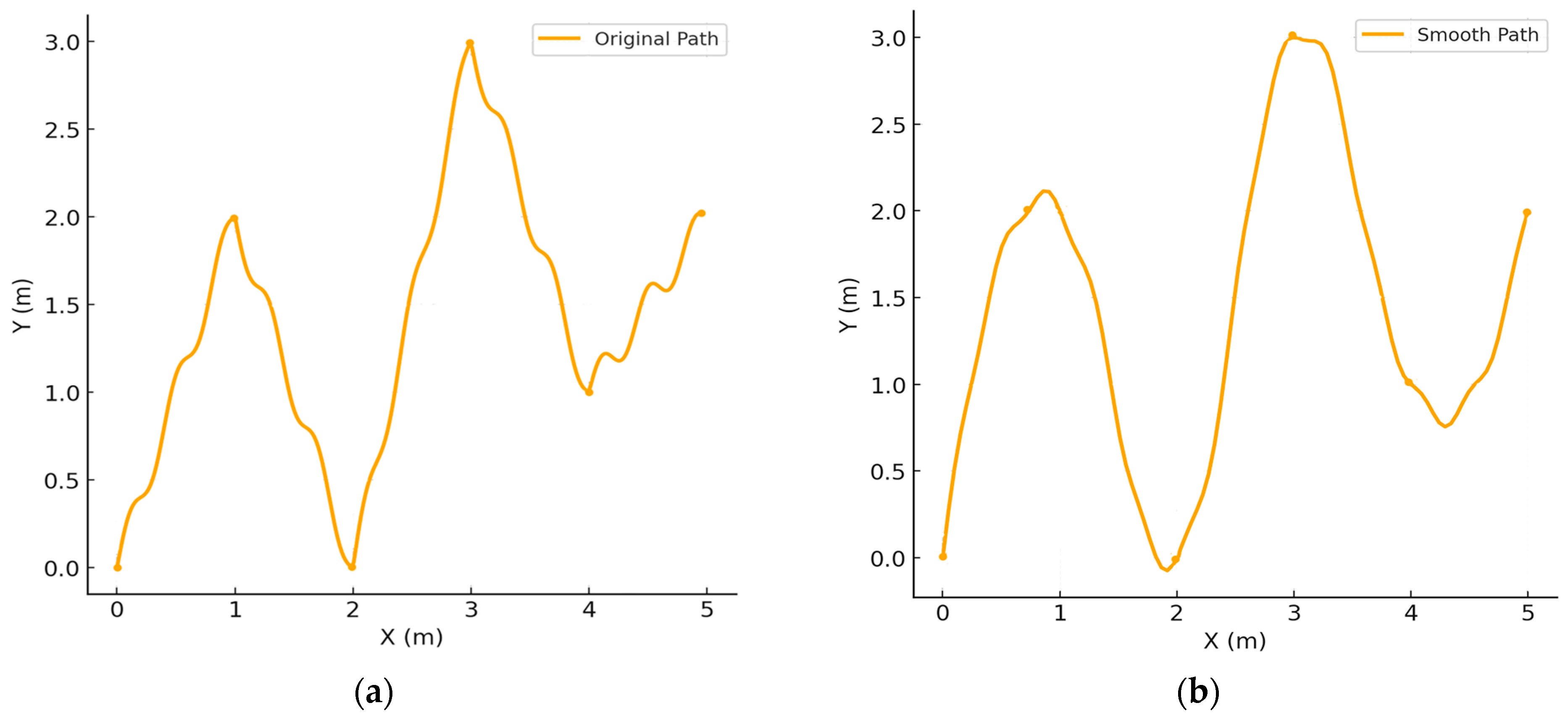
2.3.1. Cost Function Optimization for Path Smoothness
2.3.2. Uncertainty Strategy Optimization
2.3.3. Fusion Solution for Optimal Path
2.4. Experimental Design
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zou, X.; Ma, Y.; Dai, X.; Li, X.; Yang, S. Spread and Industry Development of Pepper in China. J. Hortic. 2020, 47, 1715–1726. [Google Scholar] [CrossRef]
- Lin, Q.; Xin, Z.; Kong, L.; Wang, X.; Yang, X.; He, W. Development status of China's chili pepper industry and breeding countermeasures. J. China Agric. Univ. 2023, 28, 82–95. [Google Scholar]
- Zhang, Z.; Zeng, L.; Zhang, W.; Ren, H.; Liu, L.; Zhang, Z.; Zou, X.; Qin, D.; Ou, L. Process Adaptability Appraisal of Fermented Chopped Chili Pepper Made from Fresh Chili Peppers of Different Varieties. Agronomy 2024, 14, 1833. [Google Scholar] [CrossRef]
- Lillywhite, J.; Tso, S. Consumers within the Spicy Pepper Supply Chain. Agronomy 2021, 11, 2040. [Google Scholar] [CrossRef]
- Zou, Z.; Zou, X. Geographical and Ecological Differences in Pepper Cultivation and Consumption in China. Front. Nutr. 2021, 8, 718517. [Google Scholar] [CrossRef]
- Qiao, L.; Zhao, B.; Zong, Y.; Kou, C.; Dong, Y. Development status, trend and countermeasures of chili industry in China. Chin. Veg. 2023, 11, 9–15. [Google Scholar]
- Wang, L.; Ma, Y.; Zhang, B. Market demand and breeding trend of chili pepper varieties in China. Chin. Veg. 2019, 8, 1–4. [Google Scholar] [CrossRef]
- Wang, D.; Huo, X.; Zong, Y.; Jia, H. The Current Status and Suggestions for High-Quality Development of the ”Jize Chili” Industry. North. Horticult. 2024, 20, 131–136. [Google Scholar]
- Deng, C.; Zhong, Q.; Shao, D.; Ren, Y.; Li, Q.; Wen, J.; Li, J. Potential Suitable Habitats of Chili Pepper in China under Climate Change. Plants 2024, 13, 1027. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, B.; Zhang, Z.; Cao, Y.; Yu, H.; Feng, X. Research progress, industrial status and outlook of chili pepper breeding in China during the 13th Five-Year Plan. Chin. Veg. 2021, 2, 21–29. [Google Scholar] [CrossRef]
- Fu, J.; Ji, C.; Liu, H.; Wang, W.; Zhang, G.; Gao, Y.; Zhou, Y.; Abdeen, M. Research Progress and Prospect of Mechanized Harvesting Technology in the First Season of Ratoon Rice. Agriculture 2022, 12, 620. [Google Scholar] [CrossRef]
- Zhang, M.; Ji, Y.; Li, S.; Cao, R.; Xu, H.; Zhang, Z. Progress of agricultural machinery navigation technology. J. Agric. Mach. 2020, 51, 1–18. [Google Scholar]
- Xie, B.; Jin, Y.; Faheem, M.; Gao, W.; Liu, J.; Jiang, H.; Cai, L.; Li, Y. Research progress of autonomous navigation technology for multi-agricultural scenes. Comput. Electron. Agric. 2023, 211, 107963. [Google Scholar] [CrossRef]
- Botta, A.; Cavallone, P.; Baglieri, L.; Colucci, G.; Tagliavini, L.; Quaglia, G. A Review of Robots, Perception, and Tasks in Precision Agriculture. Appl. Mech. 2022, 3, 830–854. [Google Scholar] [CrossRef]
- Tan, C.; Li, Y.; Wang, D.; Mao, W.; Yang, F. Research progress of automatic navigation technology of agricultural machinery. Agric. Mech. Res. 2020, 42, 7–14+32. [Google Scholar] [CrossRef]
- Cui, B.; Zhang, J.; Wei, X.; Cui, X.; Sun, Z.; Zhao, Y.; Liu, Y. Improved Information Fusion for Agricultural Machinery Navigation Based on Context-Constrained Kalman Filter and Dual-Antenna RTK. Actuators 2024, 13, 160. [Google Scholar] [CrossRef]
- Chen, T.; Xu, L.; Ahn, H.; Lu, E.; Liu, Y.; Xu, R. Evaluation of headland turning types of adjacent parallel paths for combine harvesters. Biosyst. Eng. 2023, 233, 93–113. [Google Scholar] [CrossRef]
- Wang, W.; Xing, C.; Feng, W. Development status and trend of autonomous navigation technology. J. Aviat. 2021, 42, 18–36. [Google Scholar]
- Gao, Q.; Lu, K.; Ji, Y.; Liu, J.; Xu, L.; Wei, G. A review of multi-sensor fusion SLAM research. Mod. Radar 2024, 46, 29–39. [Google Scholar]
- Zhong, Y.; Xue, M.; Yuan, H. Design of combined GNSS/INS navigation system for intelligent agricultural machines. J. Agric. Eng. 2021, 37, 40–46. [Google Scholar]
- Dai, H.; Bian, H.; Wang, R.; Ma, H. An INS/GNSS integrated navigation in GNSS denied environment using recurrent neural network. Def. Technol. 2020, 16, 334–340. [Google Scholar] [CrossRef]
- Abdelaziz, N.; El-Rabbany, A. Deep Learning-Aided Inertial/Visual/LiDAR Integration for GNSS-Challenging Environments. Sensors 2023, 23, 6019. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Lu, W.; Zeng, M.; Zhao, S. Multi-sensor fusion low-cost automatic navigation method for agricultural machines. China Test 2021, 47, 106–113+119. [Google Scholar]
- Yu, J.; Chen, Y.; Feng, C.; Su, Y.; Guo, J. A review on local path planning for intelligent construction robots. Comput. Eng. Appl. 2024, 60, 16–29. [Google Scholar]
- Zheng, K.; Han, B.; Wang, X. Ackerman robot motion planning system based on improved TEB algorithm. Sci. Technol. Eng. 2020, 20, 3997–4003. [Google Scholar]
- Chen, Y.; Shen, J.; Li, S. Research on dynamic obstacle avoidance strategy for multiple robots with improved TEB algorithm. Electro-Opt. Control. 2022, 29, 107–112. [Google Scholar]
- Chen, J.; Guo, C.; Liu, Y. A mobile robot path optimization method based on temporal elastic band. Sci. Technol. Eng. 2021, 21, 11212–11219. [Google Scholar]
- Wu, T.; Xie, Z.; Chen, K. Improved D*lite and time-elastic band method for mobile robot path planning. J. Sens. Technol. 2022, 35, 486–494. [Google Scholar]
- Chen, H.; Dou, P.; Cheng, C.; Wang, Z. Multi-objective point path planning in wind turbine waters based on Bi-RRT and TEB algorithms. Mar. Eng. 2024, 53, 130–136. [Google Scholar]
- Yin, X.; Dong, W.; Wang, X.; Yu, Y.; Yao, D. Route planning of mobile robot based on improved RRT star and TEB algorithm. Sci. Rep. 2024, 14, 8942. [Google Scholar] [CrossRef]
- Dai, W.; Zhang, L.; Wu, J.; Ma, X. Research on local path planning algorithm with improved TEB algorithm. Comput. Eng. Appl. 2022, 58, 283–288. [Google Scholar]
- Yang, J.; Qin, X.; Lei, J.; Lu, L.; Zhang, J.; Wang, Z. Design and Experiment of a Crawler-Type Harvester for Red Cluster Peppers in Hilly and Mountainous Regions. Agriculture 2024, 14, 1742. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, J.; Xu, Z.; Xu, Y. Interpretation of Land Use Planning Technical Regulations Based on Integration and Oriented to Transformation—”Urban Land Use Classification and Planning Land Use Standards (GB50137-2011)”. Urban Plan. 2012, 36, 42–48+92. [Google Scholar]
- Deng, P.; Luo, J. Robot Multi-sensor Fusion positioning Method in Complex Environment. Chin. J. Electron. Meas. Instrum. 2023, 37, 48–57. [Google Scholar]
- Zhang, S.; Zhang, Q.; Wang, G.; Wu, L.; Cai, Z.; Li, Y.; Lin, Z. A Combined Navigation Path Planning Method Based on Improved A* and Optimized TEB. Laser Mag. 2024, 45, 39–46. [Google Scholar]
- Luan, T.; Wang, H.; You, B.; Sun, M. A Pose-Assisted Point TEB Navigation Method for Autonomous Vehicles in Narrow Spaces. J. Instrum. Sci. Technol. 2023, 44, 121–128. [Google Scholar]
- Lv, Z.; Ni, L.; Peng, H.; Zhou, K.; Zhao, D.; Qu, G.; Yuan, W.; Gao, Y.; Zhang, Q. Research on Global Off-Road Path Planning Based on Improved A* Algorithm. ISPRS Int. J. Geo-Inf. 2024, 13, 362. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, J.; Zhang, Q. Local Path Planning of Outdoor Cleaning Robot Based on an Improved DWA. Robot 2020, 42, 617–625. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classical Kalman Filter | Extended Kalman Filter | Untraced Kalman Filter | |
|---|---|---|---|
| Advantage | Optimal estimation can be achieved under a linear model. | Positioning accuracy is high under a weakly nonlinear model | It can effectively address filter divergence issues in nonlinear systems resulting from heightened model nonlinearity or arbitrary noise distributions. |
| Disadvantage | Not applicable to systems with nonlinear dynamics and non-Gaussian noise. | Not suitable for strong nonlinear systems; Taylor series truncation errors reduce accuracy, and the calculation of the Jacobian matrix is complex. | When the posterior probability density follows a non-Gaussian model, significant errors may occur. |
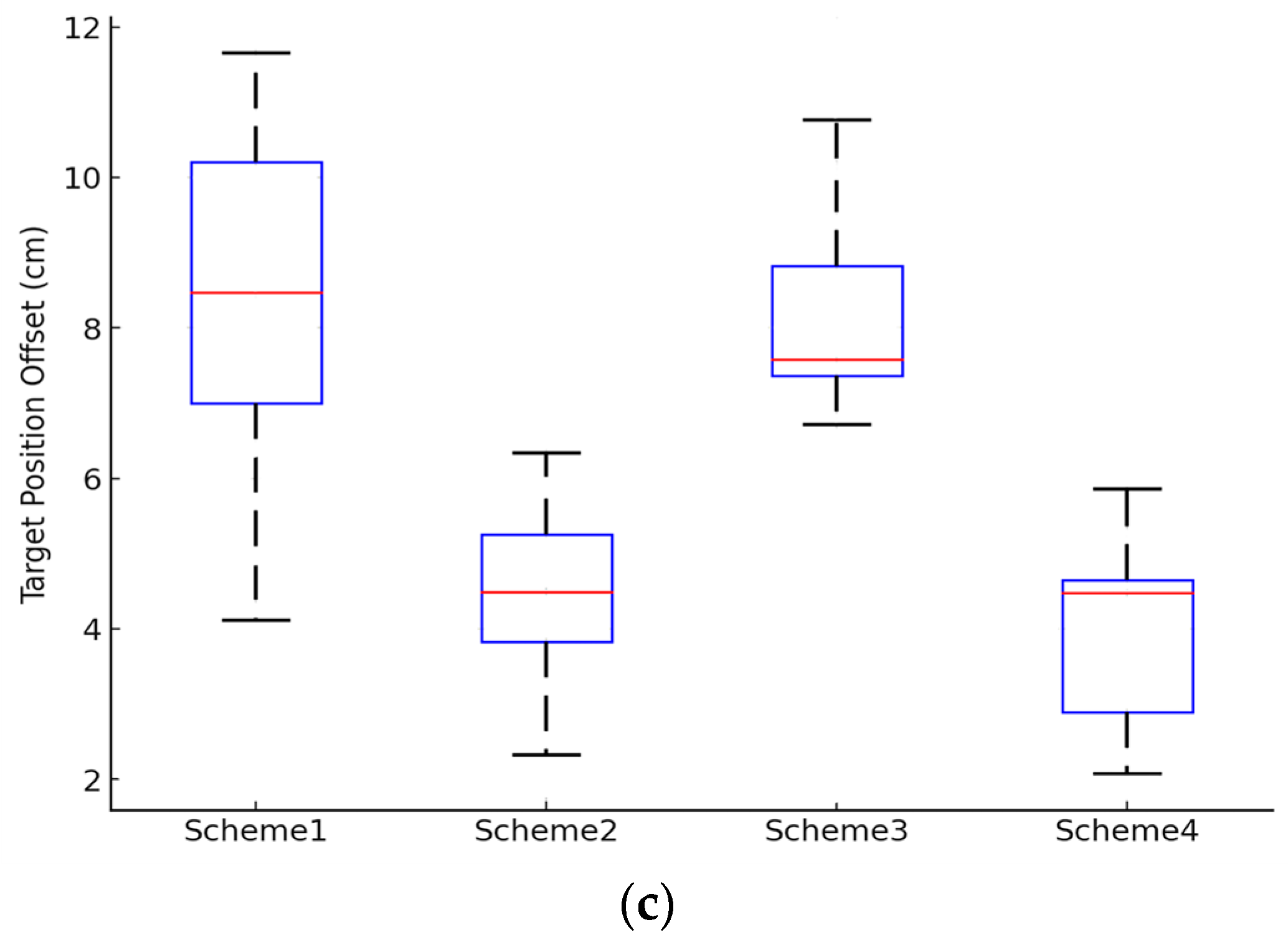
| LiDAR | IMU + GNSS | Standard TEB Algorithm | Optimized TEB Algorithm | The Number of Collisions/Time | Average Planned Path Length/m | Average Time Consumption/s | Average Target Position Offset/cm | |
|---|---|---|---|---|---|---|---|---|
| Scheme 1 | √ | √ | 8 | 11.37 | 30.27 | 8.35 | ||
| Scheme 2 | √ | √ | √ | 4 | 11.27 | 30.66 | 4.44 | |
| Scheme 3 | √ | √ | 6 | 10.93 | 28.13 | 8.16 | ||
| Scheme 4 | √ | √ | √ | 1 | 10.79 | 27.72 | 4.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, W.; Gu, Q.; Gu, H.; Xia, R.; Gao, Y.; Zhou, Z.; Luo, K.; Fang, X.; Zhang, Y. Design of Chili Field Navigation System Based on Multi-Sensor and Optimized TEB Algorithm. Agronomy 2024, 14, 2872. https://doi.org/10.3390/agronomy14122872
Han W, Gu Q, Gu H, Xia R, Gao Y, Zhou Z, Luo K, Fang X, Zhang Y. Design of Chili Field Navigation System Based on Multi-Sensor and Optimized TEB Algorithm. Agronomy. 2024; 14(12):2872. https://doi.org/10.3390/agronomy14122872
Chicago/Turabian StyleHan, Weikang, Qihang Gu, Huaning Gu, Rui Xia, Yuan Gao, Zhenbao Zhou, Kangya Luo, Xipeng Fang, and Yali Zhang. 2024. "Design of Chili Field Navigation System Based on Multi-Sensor and Optimized TEB Algorithm" Agronomy 14, no. 12: 2872. https://doi.org/10.3390/agronomy14122872
APA StyleHan, W., Gu, Q., Gu, H., Xia, R., Gao, Y., Zhou, Z., Luo, K., Fang, X., & Zhang, Y. (2024). Design of Chili Field Navigation System Based on Multi-Sensor and Optimized TEB Algorithm. Agronomy, 14(12), 2872. https://doi.org/10.3390/agronomy14122872