


Research on Path Tracking for an Orchard Mowing Robot Based on Cascaded Model Predictive Control and Anti-Slip Drive Control

 ,
,
Abstract
1. Introduction
2. Materials and Methods
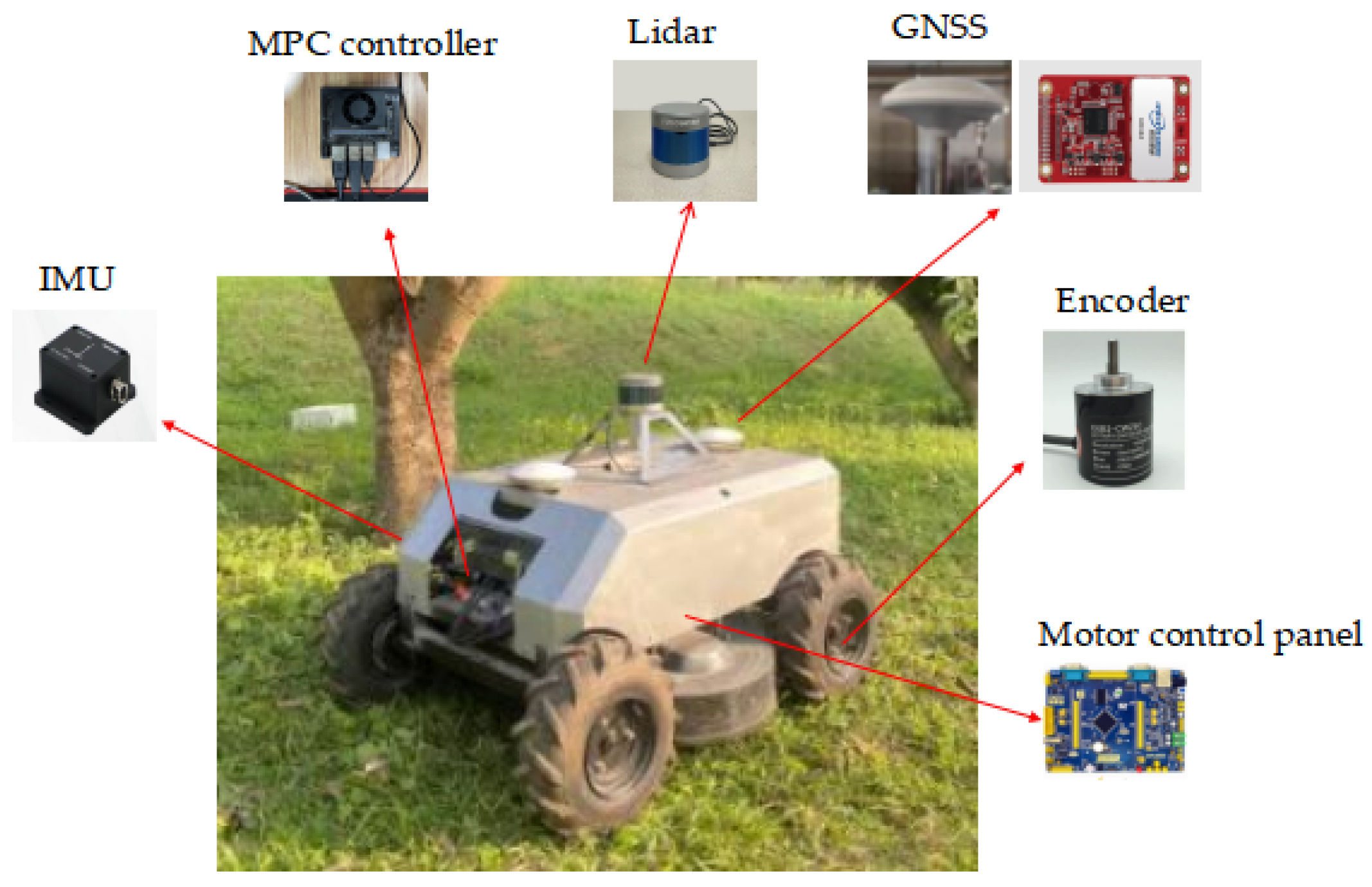
2.1. Test Materials
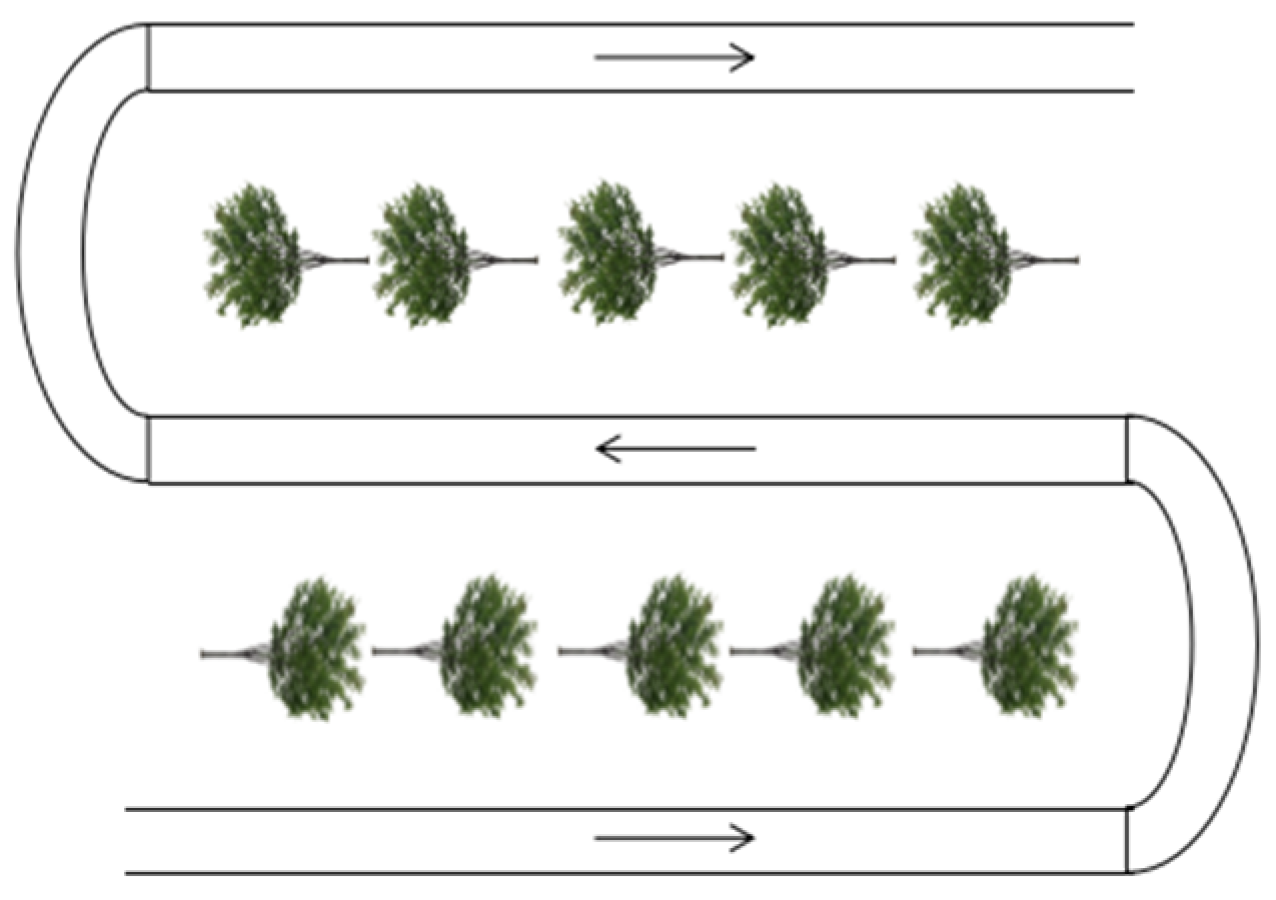
2.2. Experimental Methods
2.2.1. Method Design for Measuring the Slip Rate of a Mowing Robot
2.2.2. Path-Tracking Parameter Definition
3. Mower Path-Tracking Controller Design Based on Adaptive MPC and Slip-Rate-Based Fuzzy Control
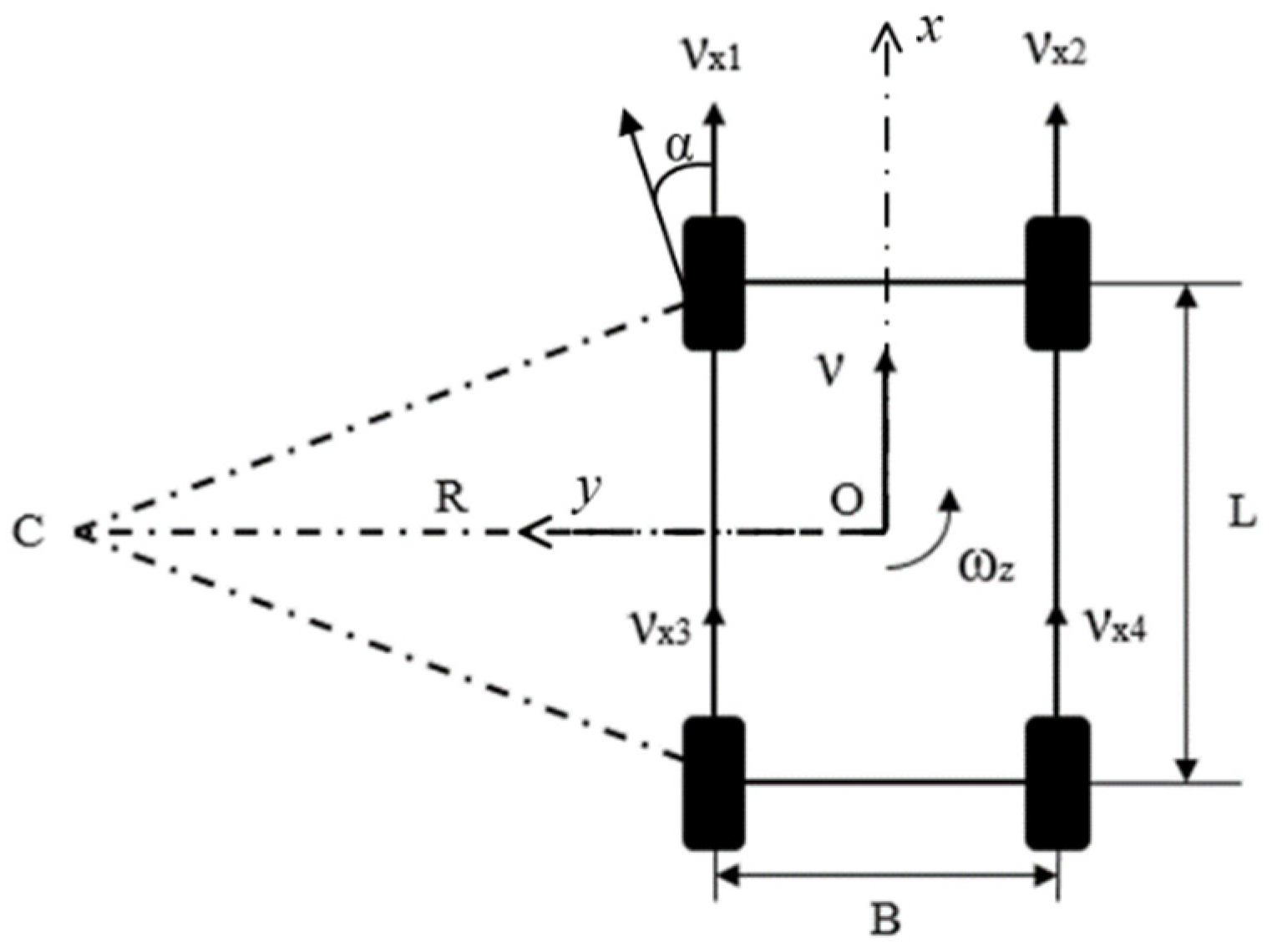
3.1. Four-Wheel Differential Kinematic Model of the Lawn Mower
3.2. Design of an Adaptive Time Domain Model of a Predictive Controller
3.2.1. Linear Error Discretization of the Kinematic Lawn Mower Model
3.2.2. Design of the Objective Function and Constraint Conditions
3.2.3. Optimization Problem-Solving
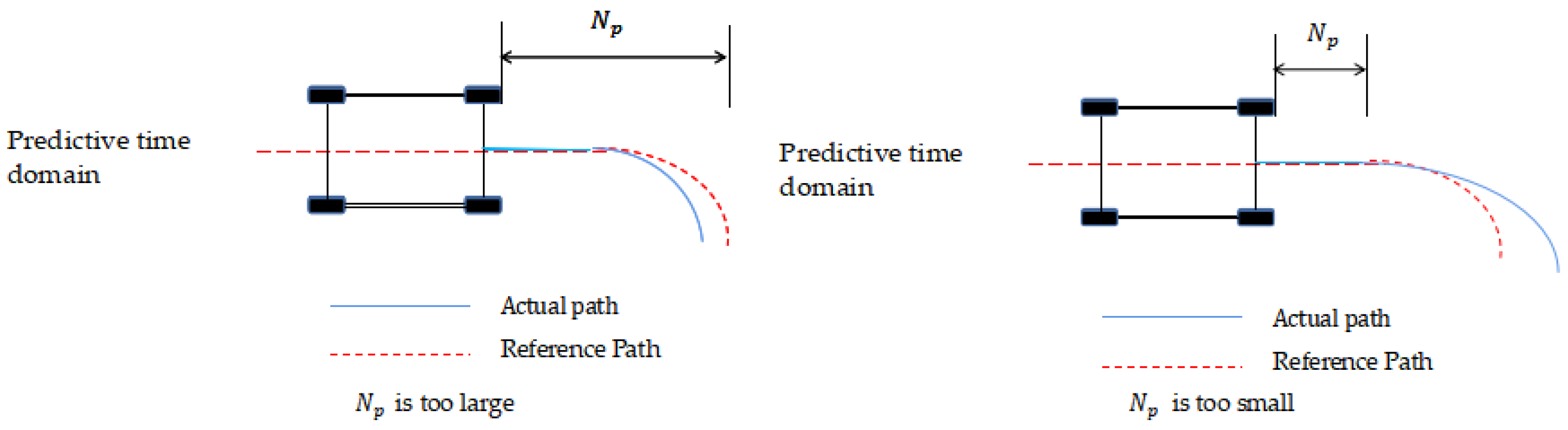
3.2.4. Adaptive Time Domain Module Design
3.3. Mower Driving Wheel Anti-Slip Control Based on Fuzzy Slip Rate Control
3.3.1. Establishing a Dynamic Model for the Driving Wheel of a Mower
3.3.2. Target Slip Rate Range of Lawn-Mowing Robots
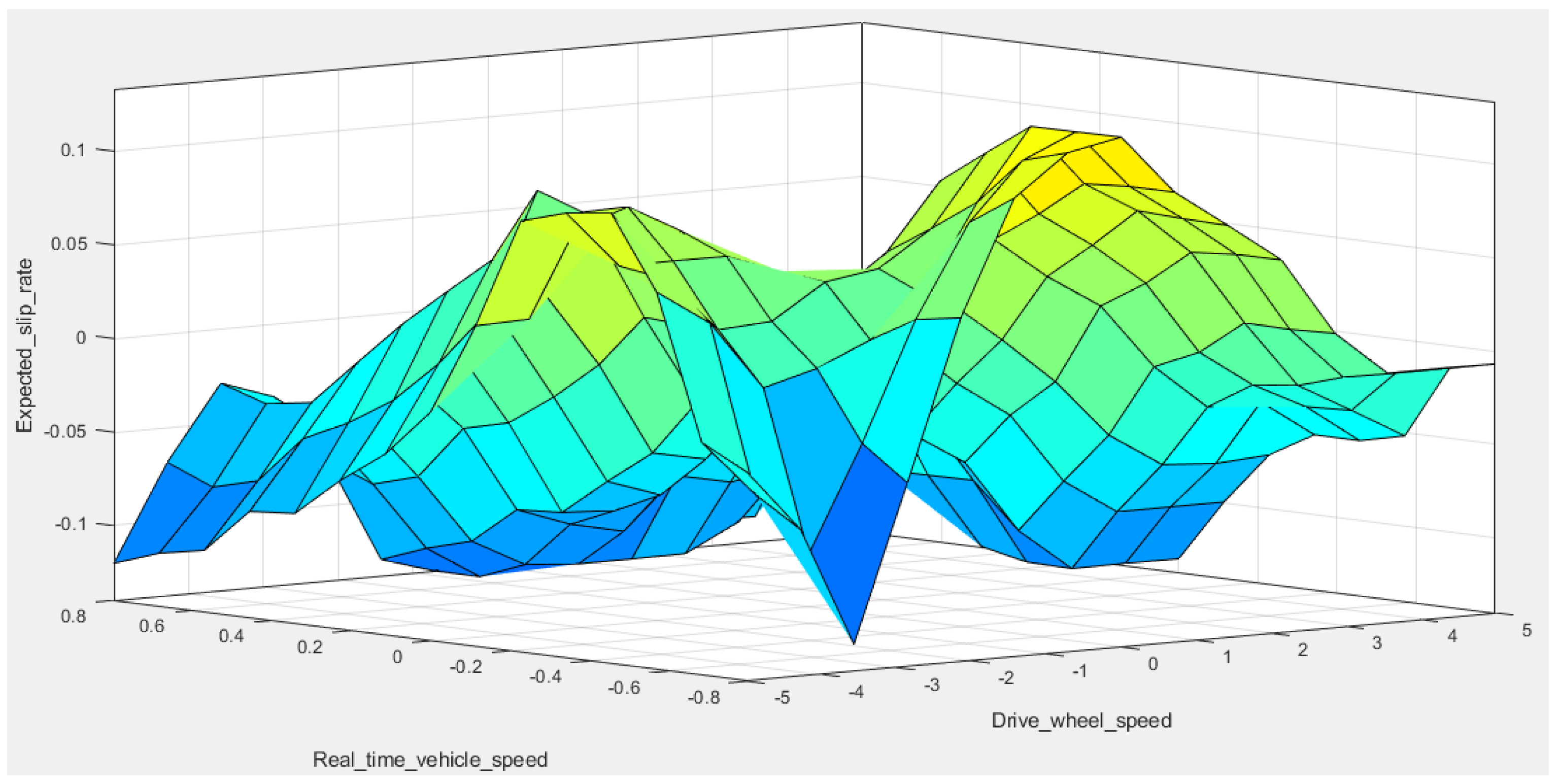
3.3.3. Fuzzy Controller Design Considering the Slip Rate
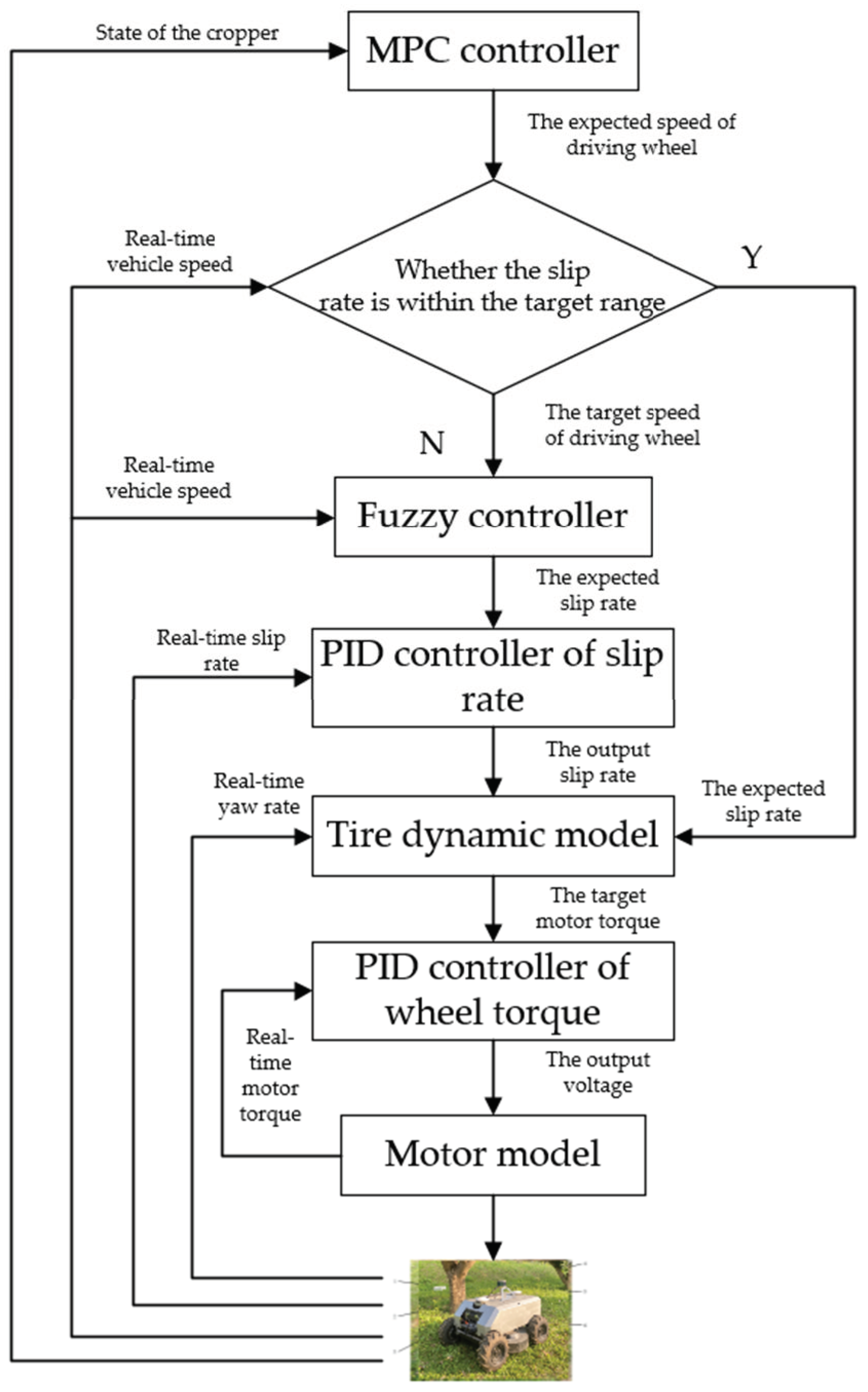
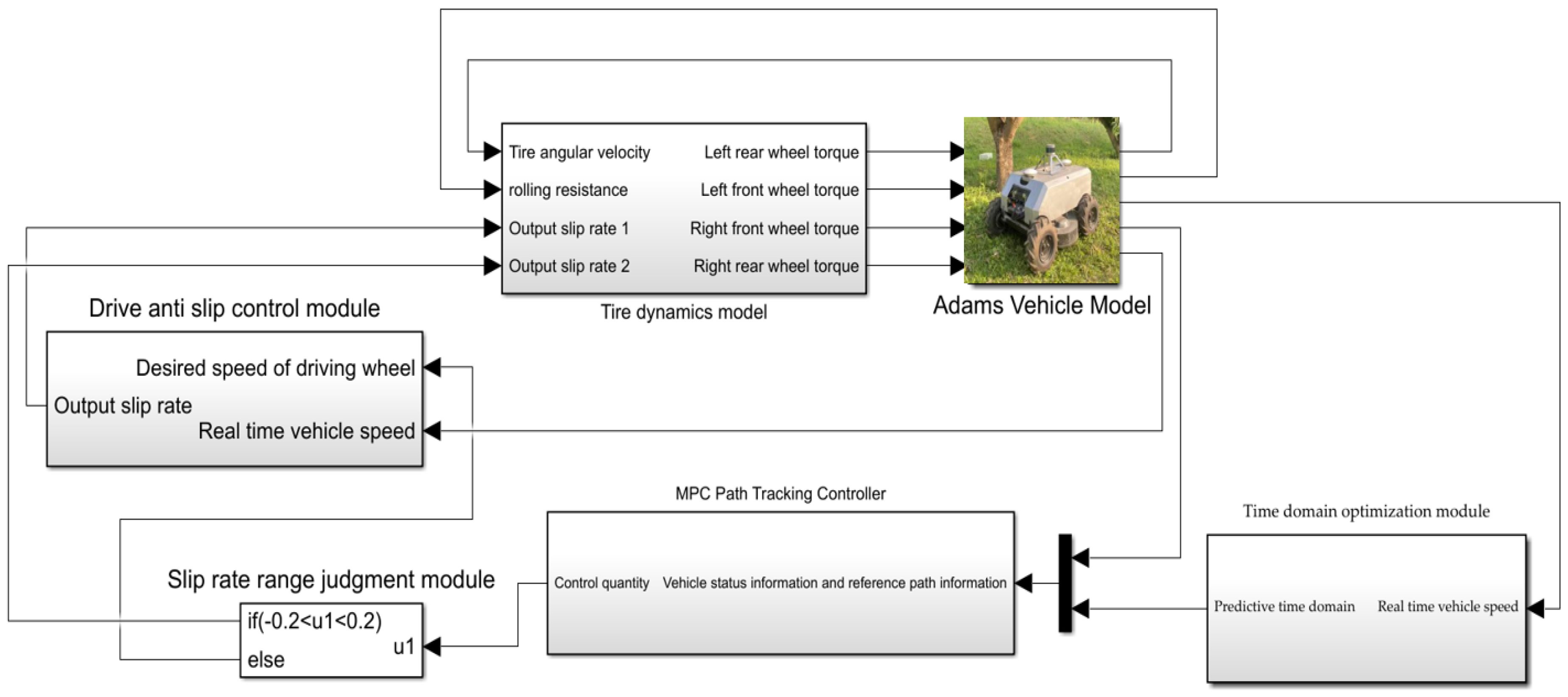
3.4. Path-Tracking Controller for Designing Adaptive MPC and Fuzzy Slip Rate Control Schemes
4. Results and Discussion
4.1. Path-Tracking Simulation
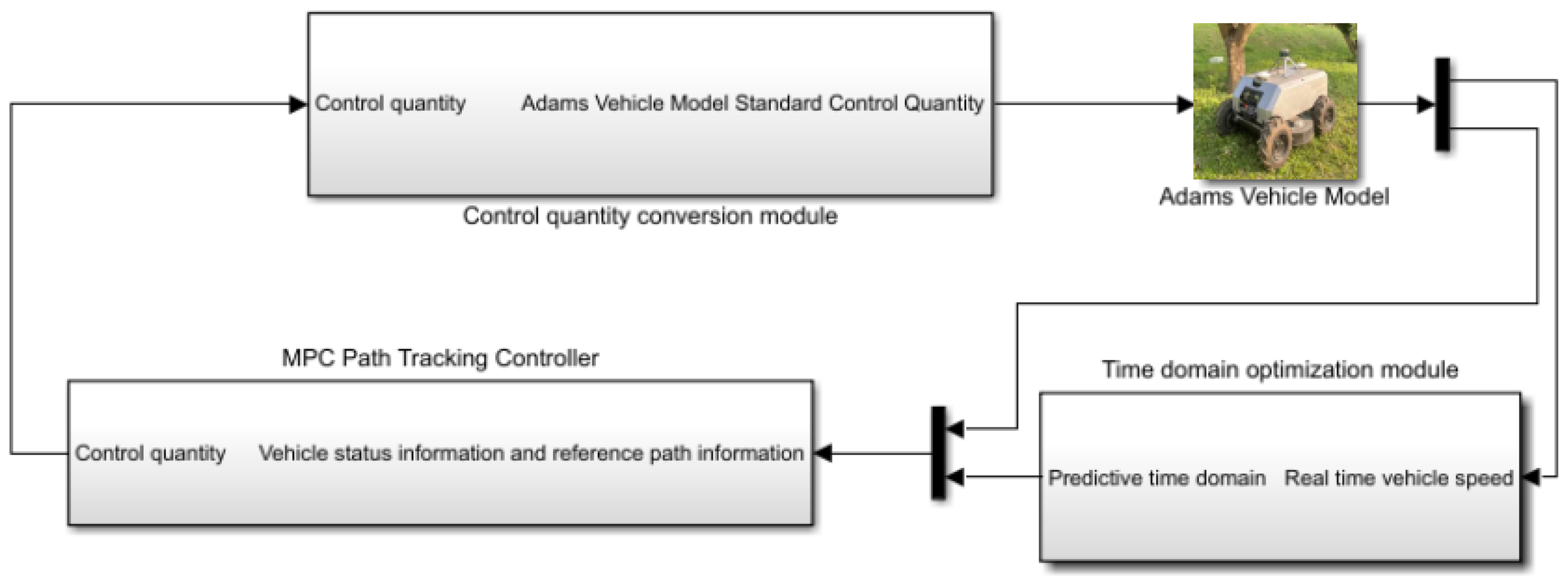
4.1.1. Adaptive MPC-Based Path-Tracking Simulation
4.1.2. Simulation Experiment Involving the Path-Tracking Controller Combined with Anti-Slip Drive Control
4.2. Field Trial Verification
5. Conclusions
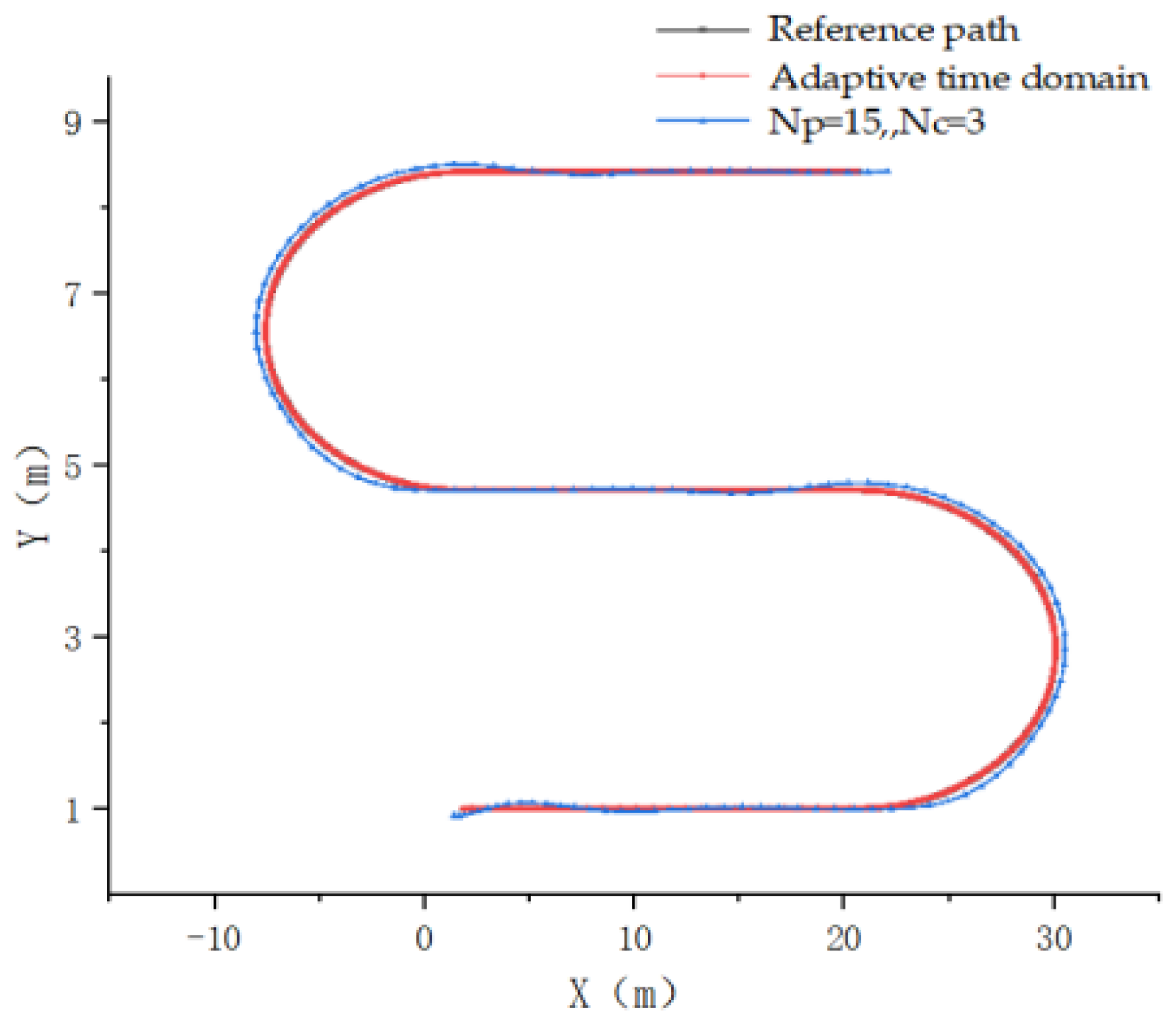
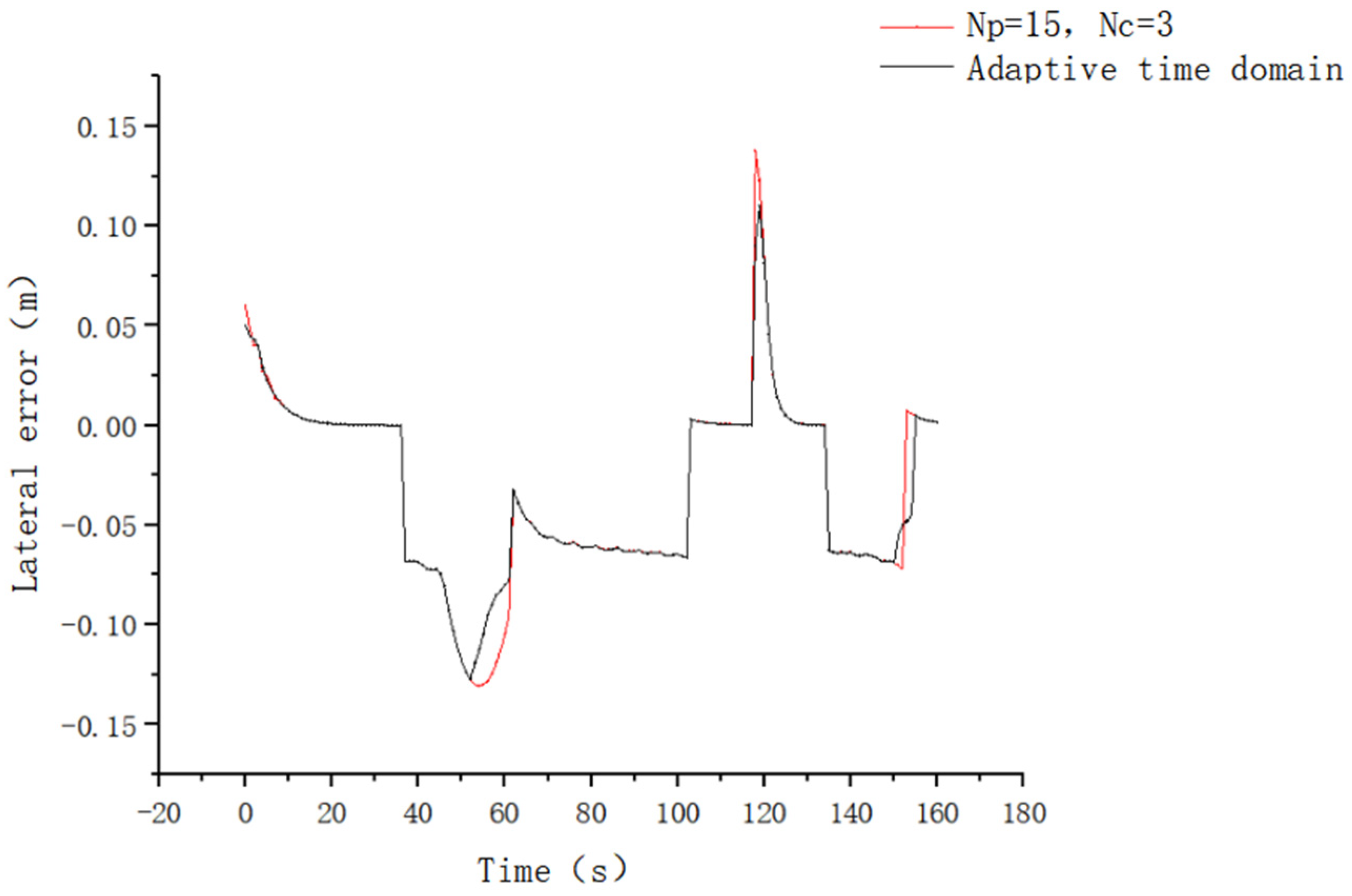
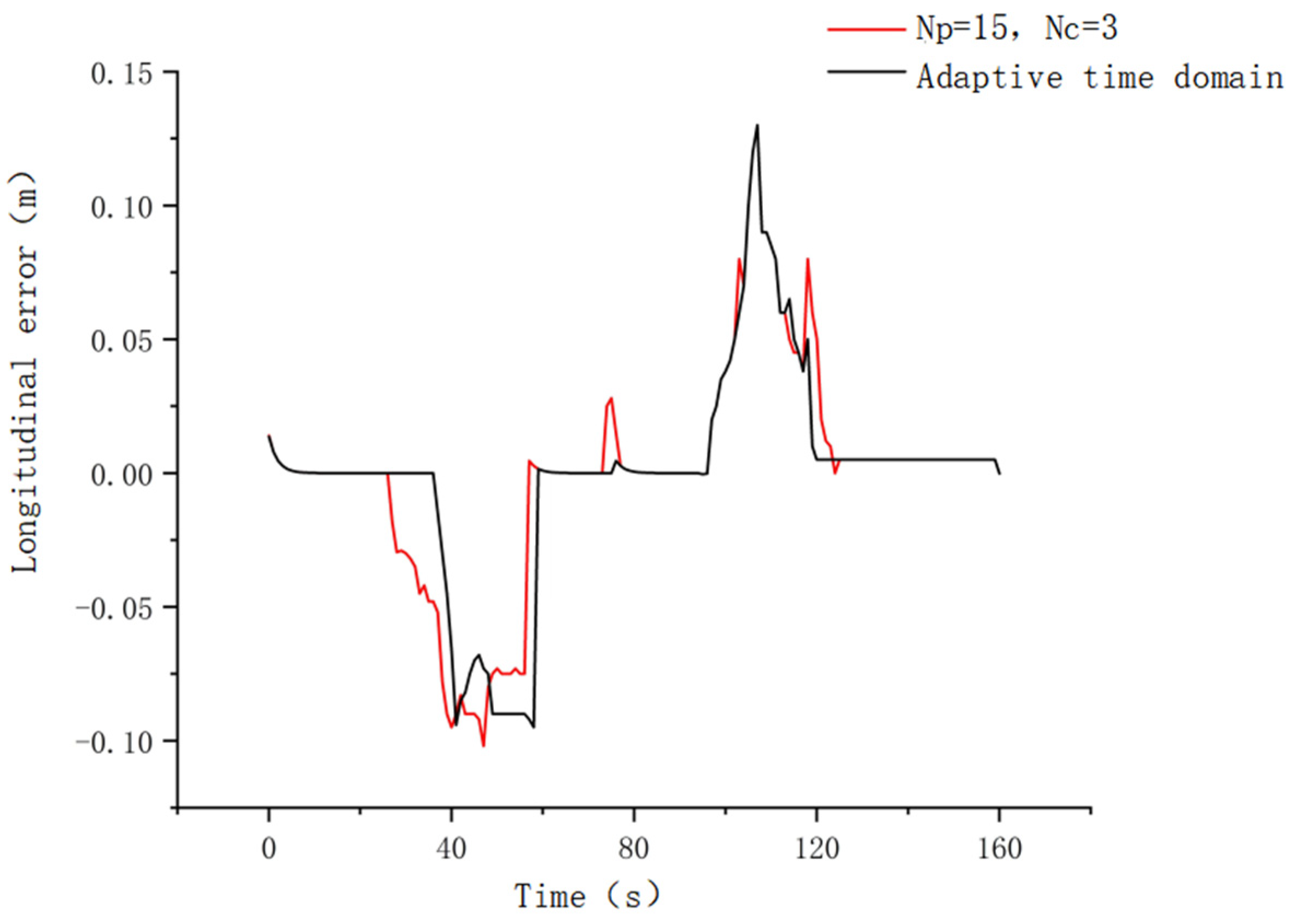
- The effectiveness of adaptive time domain MPC and traditional MPC path-tracking controller is compared in a MATLAB simulation. Compared with traditional MPC control, the adaptive time domain MPC path-tracking controller has an average lateral error absolute value that is 3.2 cm smaller and an average longitudinal error absolute value that is 1.7 cm smaller.
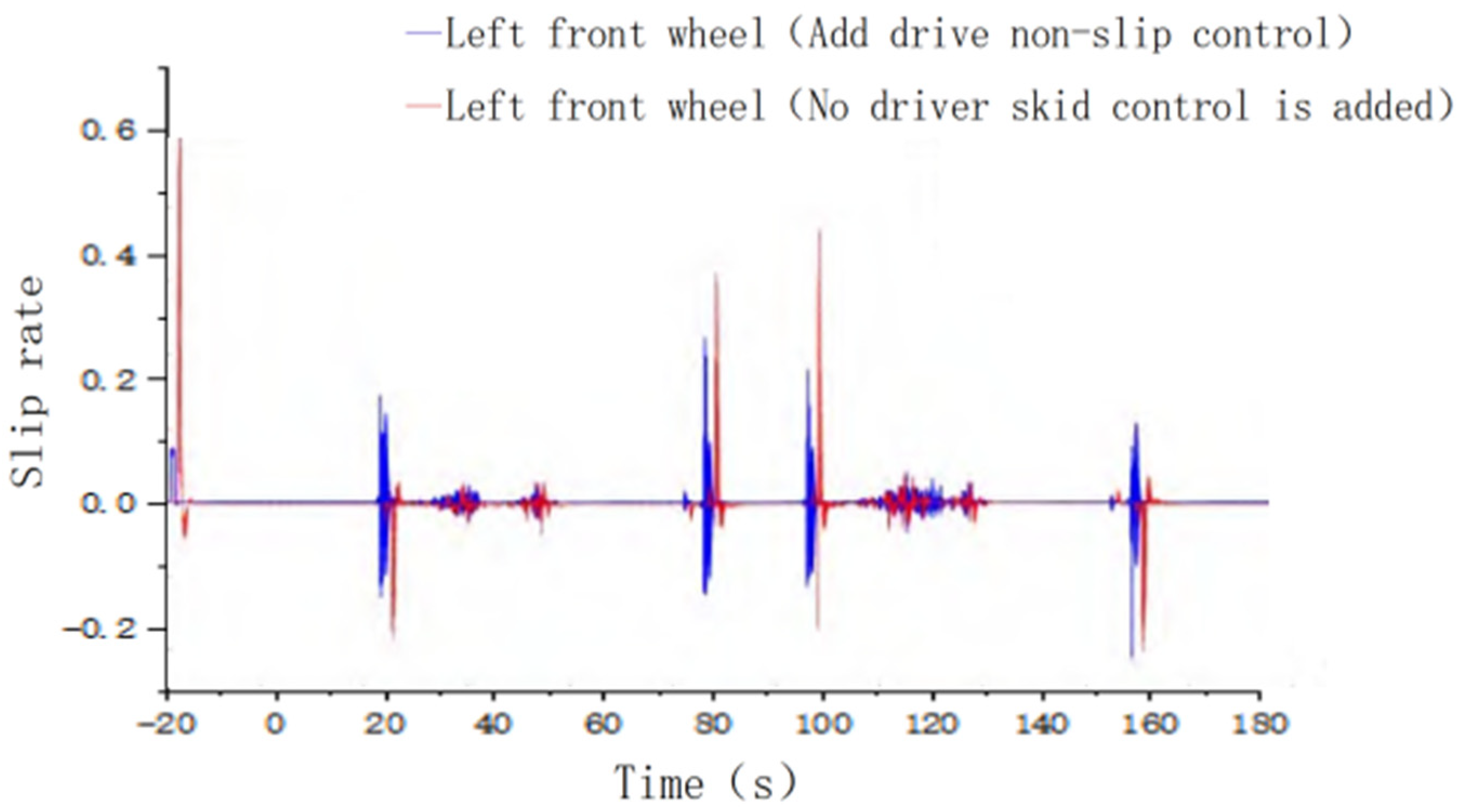
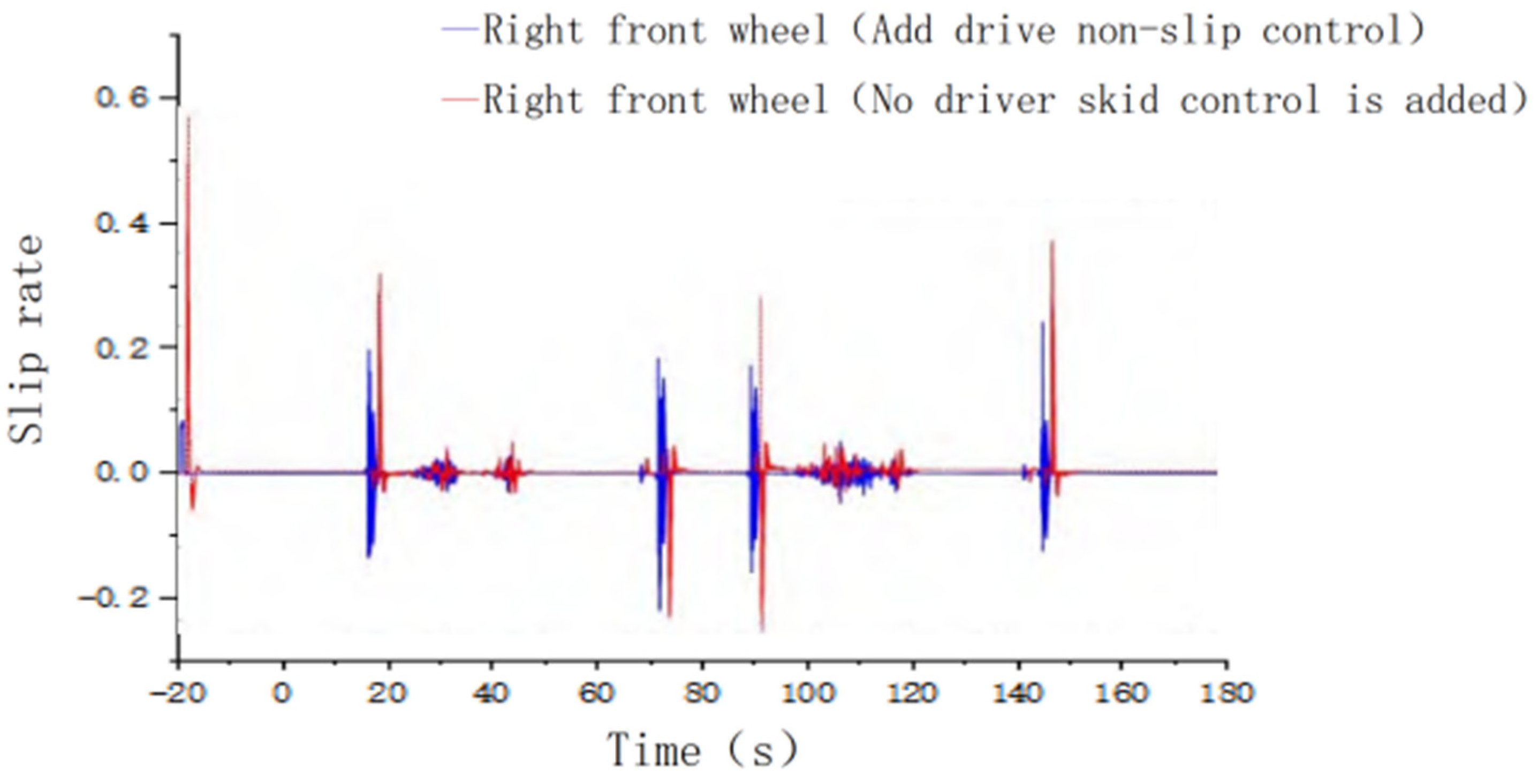
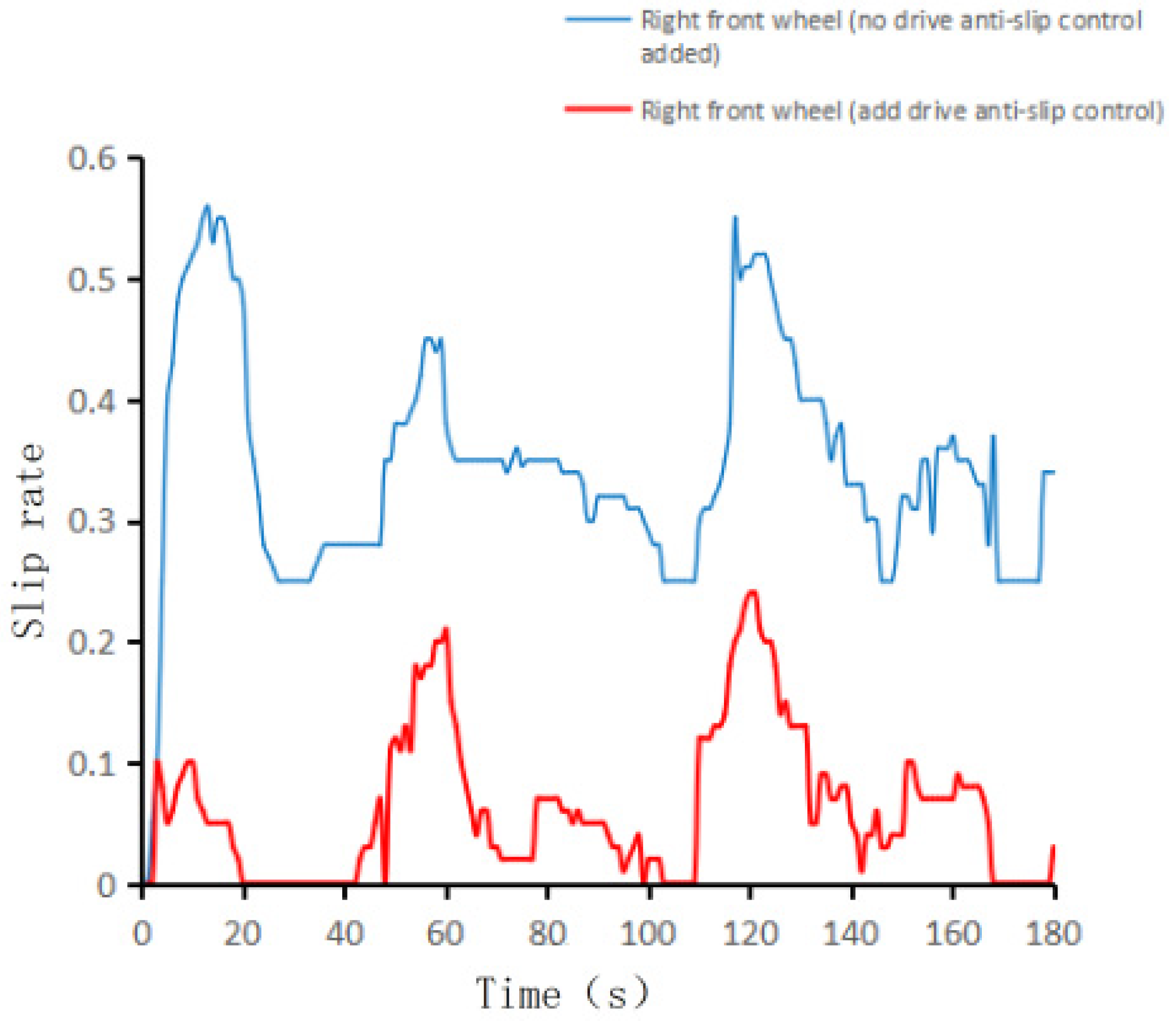
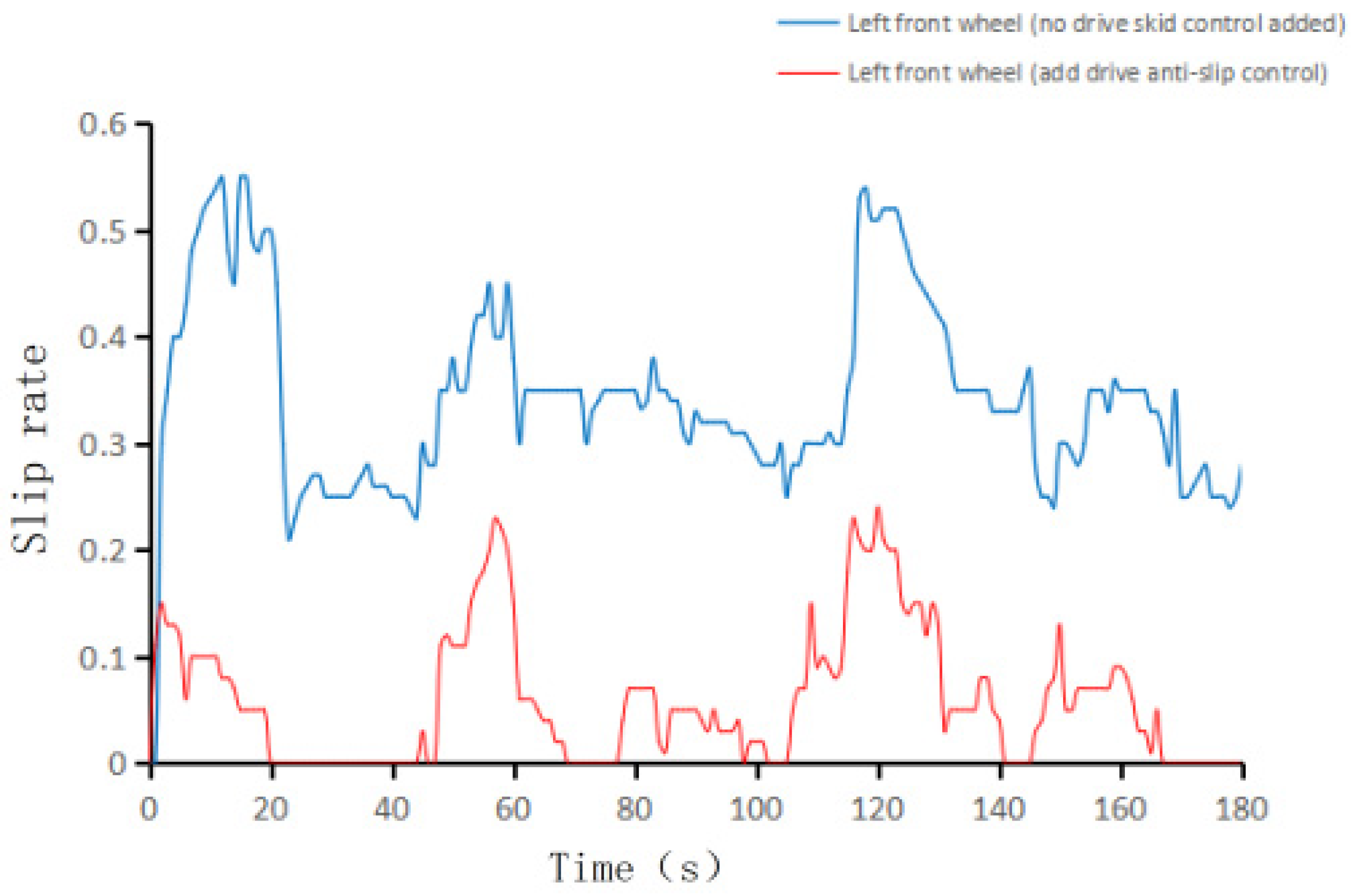
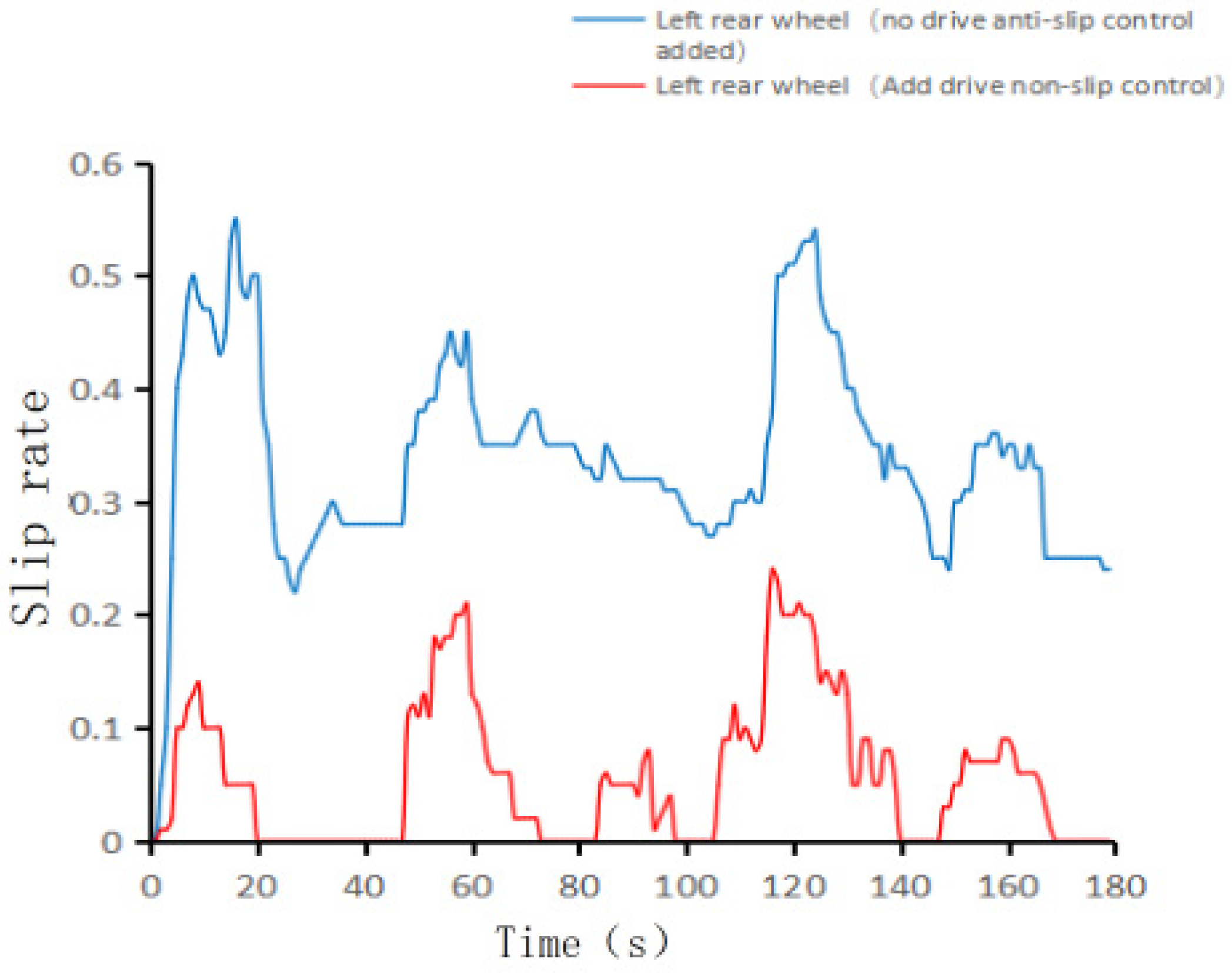
- Simulation experiments are conducted on the designed path-tracking controller combined with anti-slip driving control. The results show that the path-tracking controller with anti-slip driving control added can effectively maintain the slip rate of the driving wheel within the designed target slip rate range on random road surfaces, with an amplitude close to 0.2. The path-tracking controller without an added anti-slip drive controller exhibits a significant change in the slip rate, reaching an amplitude of 0.5. At this time, the lawn mower experiences severe slipping on random road surfaces, which has a significant impact on the effectiveness of path tracking.
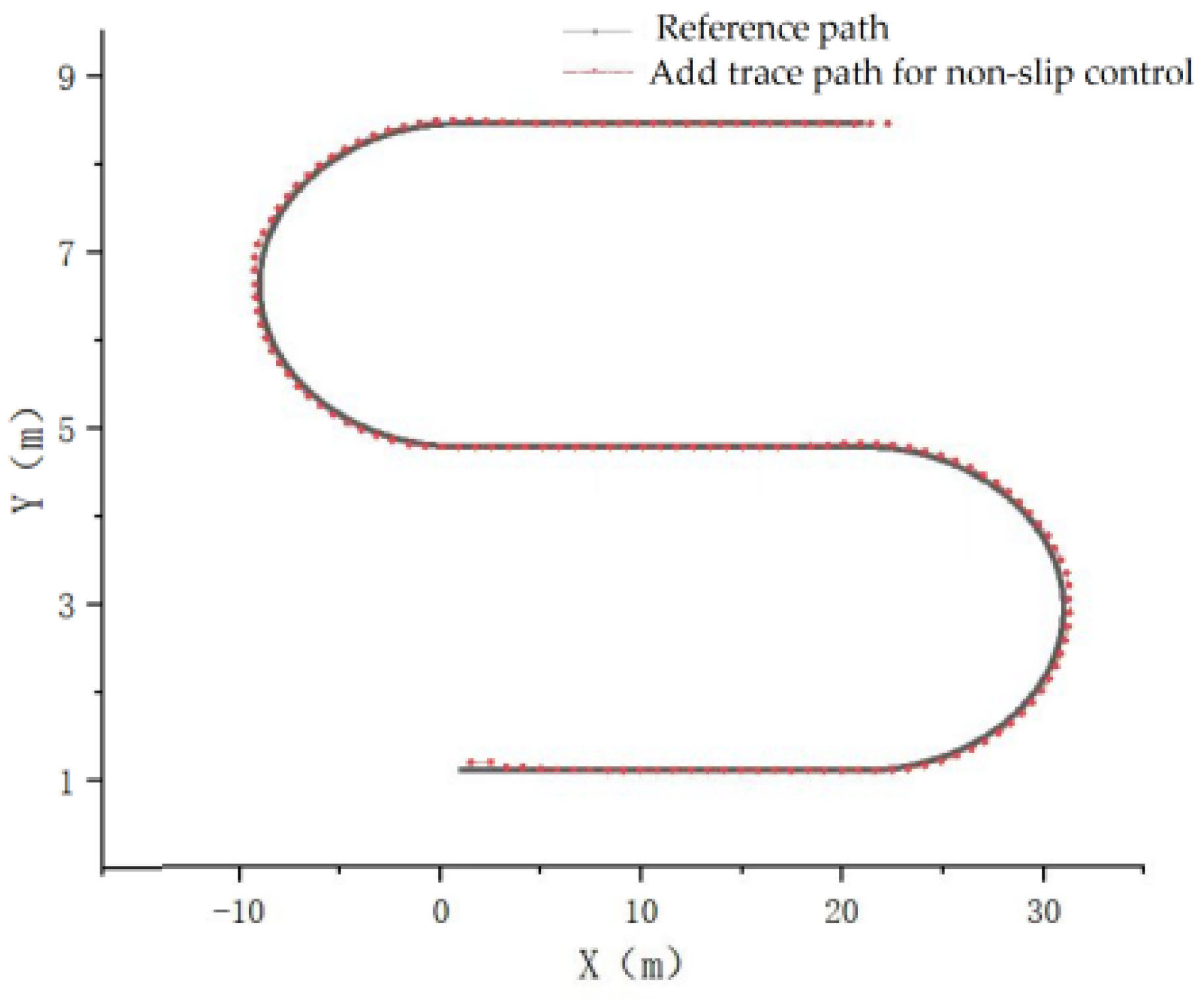
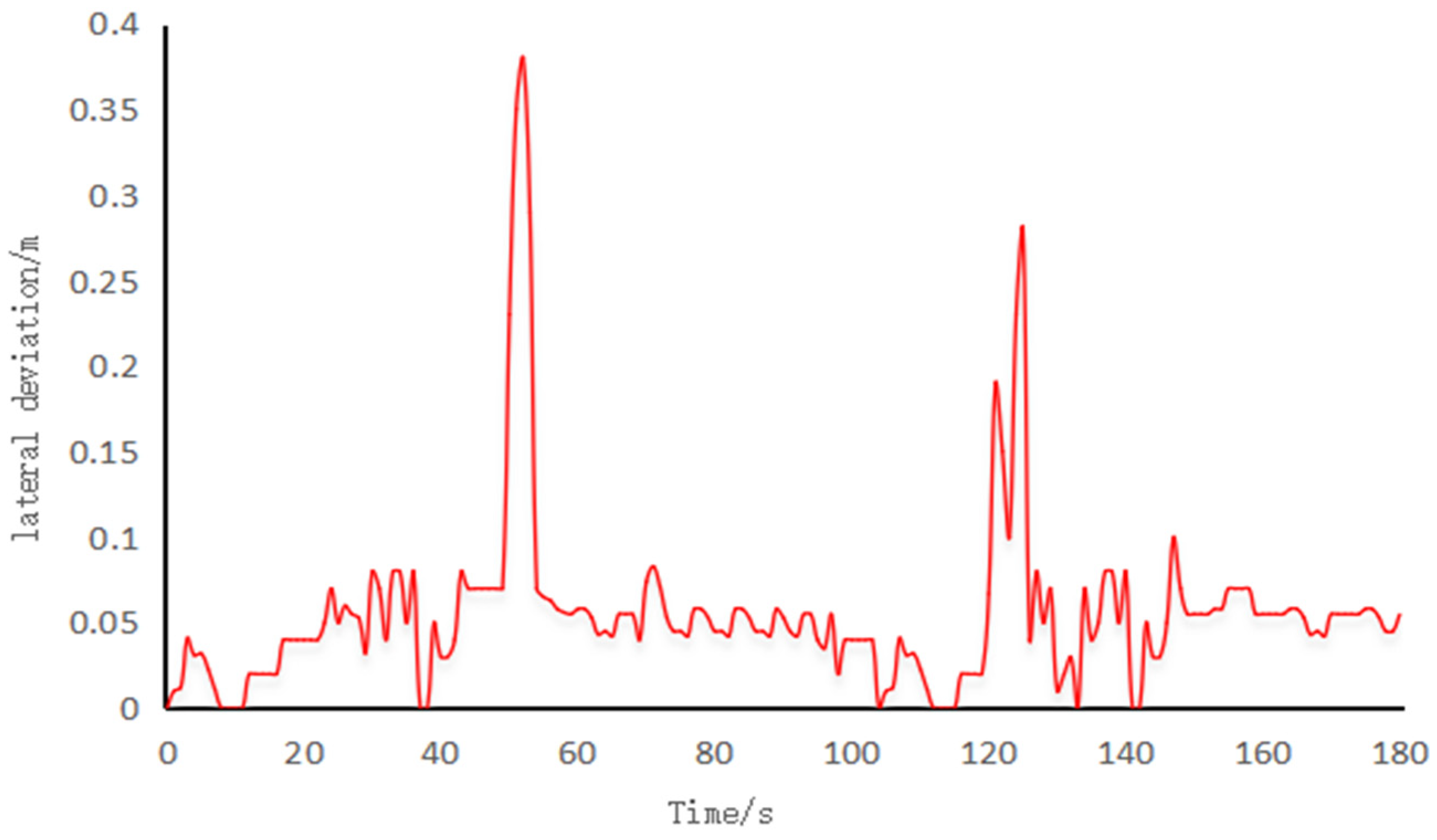
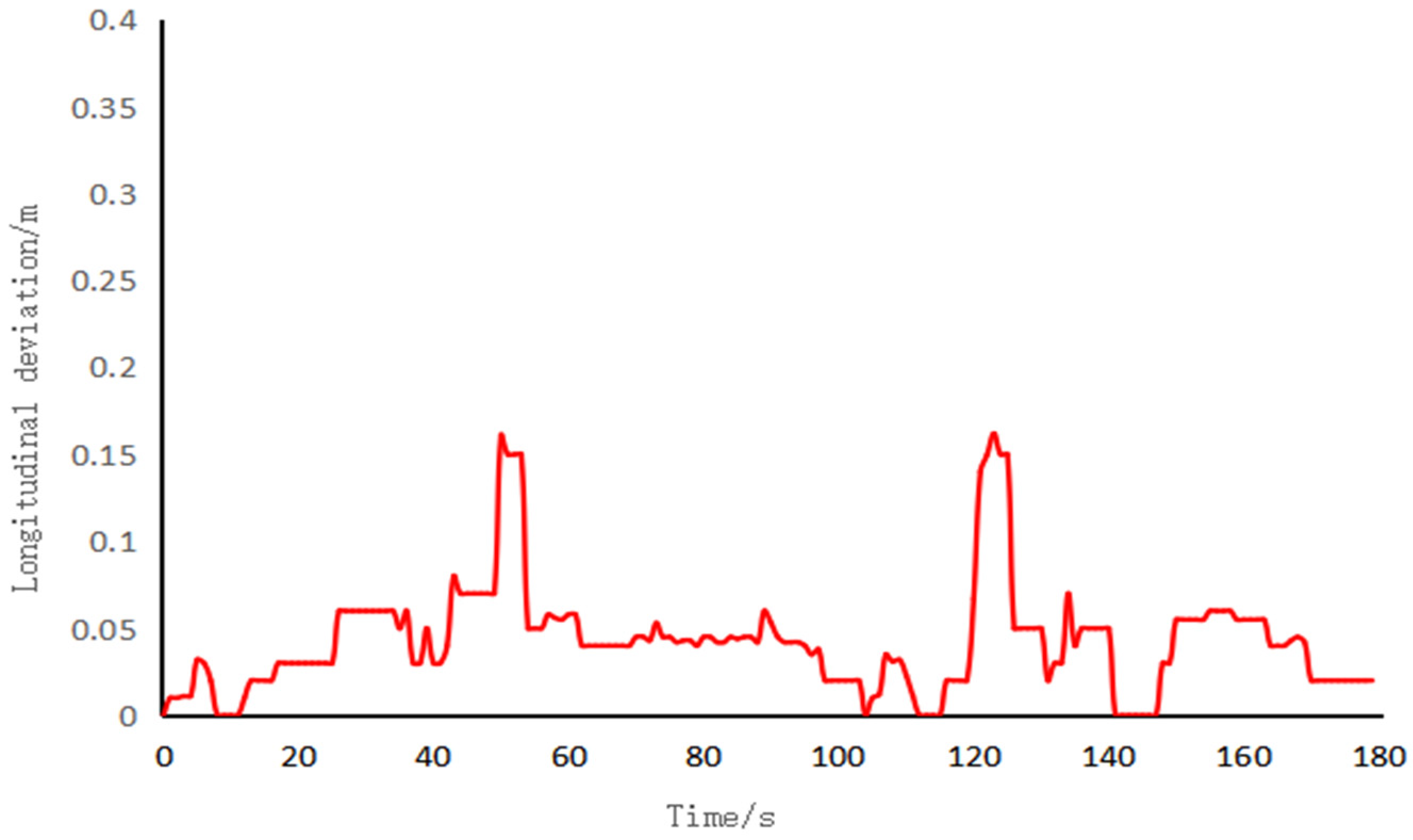
- The field test results show that the lawn mower equipped with a combination of anti-slip drive control and adaptive MPC path tracking has a good effect on tracking the reference path. The average lateral error value can be controlled within approximately 5 cm, and the average longitudinal error value can be controlled within 4 cm. At the same time, the slip rate of the driving wheel can be maintained within the target slip rate range, indicating that the proposed controller can reduce the sliding of the driving wheel while ensuring high path-tracking accuracy.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- FAO (Food and Agriculture Organization of the United Nations). Recommendations for Improved Weed Management; Plant Productionand Protection Division: Rome, Italy, 2006; pp. 1–56. [Google Scholar]
- Nishimura, Y.; Yamaguchi, T. Grass Cutting Robot for Inclined Surfaces in Hilly and Mountainous Areas. Sensors 2023, 23, 528. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Wang, L.; Li, Y.W.; Li, D.L. Model predictive control and its application in agriculture: A review. Comput. Electron. Agric. 2018, 151, 104–117. [Google Scholar] [CrossRef]
- Chen, S.P.; Xiong, G.M.; Chen, H.Y.; Negrut, D. MPC-based path tracking with PID speed control for high-speed autonomous vehicles considering time-optimal travel. J. Cent. South Univ. 2020, 27, 3702–3720. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, K.; Ma, S.; Sun, L.; Gao, W.; Dong, Z. Improved Linear Quadratic Regulator Lateral Path Tracking Approach Based on a Real-Time Updated Algorithm with Fuzzy Control and Cosine Similarity for Autonomous Vehicles. Electronics 2022, 11, 3703. [Google Scholar] [CrossRef]
- Zhang, C.; Gao, G.; Zhao, C.; Li, L.; Li, C.; Chen, X. Research on 4WS Agricultural Machine Path Tracking Algorithm Based on Fuzzy Control Pure Tracking Model. Machines 2022, 10, 597. [Google Scholar] [CrossRef]
- Zhong, C.-Q.; Wang, L.; Xu, C.-F. Path Tracking of Permanent Magnet Synchronous Motor Using Fractional Order Fuzzy PID Controller. Symmetry 2021, 13, 1118. [Google Scholar] [CrossRef]
- Jeong, Y.; Yim, S. Model Predictive Control-Based Integrated Path Tracking and Velocity Control for Autonomous Vehicle with Four-Wheel Independent Steering and Driving. Electronics 2021, 10, 2812. [Google Scholar] [CrossRef]
- Fue, K.; Porter, W.; Barnes, E.; Li, C.; Rains, G. Autonomous Navigation of a Center-Articulated and Hydrostatic Transmission Rover using a Modified Pure Pursuit Algorithm in a Cotton Field. Sensors 2020, 20, 4412. [Google Scholar] [CrossRef]
- Paramesh, S.; Suresh Rajendran, A. Unified seakeeping and manoeuvring model with a PID controller for path following of a KVLCC2 tanker in regular waves. Appl. Ocean Res. 2021, 116, 102860. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.K.; Wen, X.; Zhang, G.; Ma, Q.L.; Cheng, S.K.; Qi, j.; Xu, L.Y.; Chen, L.Q. An optimal goal point determination algorithm for automatic navigation of agricultural machinery: Improving the tracking accuracy of the Pure Pursuit algorithm. Comput. Electron. Agric. 2022, 194, 106760. [Google Scholar] [CrossRef]
- Sun, C.Y.; Sun, P.; Zhou, J.; Mao, J. Travel Reduction Control of Distributed Drive Electric Agricultural Vehicles Based on Multi-Information Fusion. Agriculture 2022, 12, 70. [Google Scholar] [CrossRef]
- Bai, G.; Meng, Y.; Liu, L.; Luo, W.; Gu, Q.; Liu, L. Review and Comparison of Path Tracking Based on Model Predictive Control. Electronics 2019, 8, 1077. [Google Scholar] [CrossRef]
- Wu, H.; Zhang, H.; Feng, Y. MPC-Based Obstacle Avoidance Path Tracking Control for Distributed Drive Electric Vehicles. World Electr. Veh. J. 2022, 13, 221. [Google Scholar] [CrossRef]
- Liu, G.H.; Zhang, H.; Zhang, D.; Shen, Y.; Wang, Z.J.; Xu, Y.D. High clearance four-wheel independent electric drive sprayer path tracking control based on self-correction controller. J. Phys. Conf. Ser. 2022, 2383, 012043. [Google Scholar] [CrossRef]
- Xu, J.H.; Lai, J.; Guo, R.; Lu, X.; Xu, L. Efficiency-Oriented MPC Algorithm for Path Tracking in Autonomous Agricultural Machinery. Agronomy 2022, 12, 1662. [Google Scholar] [CrossRef]
- Manikandan, S.; Kaliyaperumal, G.; Hakak, S.; Gadekallu, T.R. Curve-Aware Model Predictive Control (C-MPC) Trajectory Tracking for Automated Guided Vehicle (AGV) over On-Road, In-Door, and Agricultural-Land. Sustainability 2022, 14, 12021. [Google Scholar] [CrossRef]
- He, J.; Hu, L.; Wang, P.; Liu, Y.X.; Man, Z.X.; Tu, T.P.; Yang, L.N.; Li, Y.Y.; Yi, Y.L.; Li, W.C.; et al. Path tracking control method and performance test based on agricultural machinery pose correction. Comput. Electron. Agric. 2022, 200, 107185. [Google Scholar] [CrossRef]
- Huang, P.K.; Zhang, Z.G.; Luo, X.W.; Liu, Z.E.; Wang, H.; Yue, B.B.; Gao, W.W. Development of external acceleration identification and attitude estimation system of field working vehicle. Trans. Chin. Soc. Agric. Eng. 2019, 35, 9–15. [Google Scholar]
- Ge, L.H.; Zhao, Y.; Ma, F.W.; Guo, K.H. Towards longitudinal and lateral coupling control of autonomous vehicles using offset free MPC. Control Eng. Pract. 2022, 121, 105074. [Google Scholar] [CrossRef]
- Guo, J.C.; Shen, W.B.; Ning, J.S. Development of Lee’s exact method for Gauss–Krüger projection. J. Geod. 2020, 94, 58. [Google Scholar] [CrossRef]
- Liu, X.X.; Wang, W.; Li, X.L.; Liu, F.S.; He, Z.H.; Yao, Y.Z.; Ruan, H.P.; Zhang, T. MPC-based high-speed trajectory tracking for 4WIS robot. ISA Trans. 2022, 123, 413–424. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.R.; Yan, J.H.; Wang, H.; Ge, H.L.; Zhu, Z.Y.; Yang, G.J. Adaptive MPC trajectory tracking for AUV based on Laguerre function. Ocean Eng. 2022, 261, 111870. [Google Scholar] [CrossRef]
- Goncalo, C.P.; Wahlberg, B.; Pettersson, H.; Martensson, J. Adaptive reference aware MPC for lateral control of autonomous vehicles. Control Eng. Pract. 2023, 132, 105403. [Google Scholar] [CrossRef]
- Guan, L.; Liao, P.; Wang, A.; Shi, L.; Zhang, C.; Wu, X. Path tracking control of intelligent vehicles via a speed-adaptive MPC for a curved lane with varying curvature. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 09544070221133967. [Google Scholar] [CrossRef]
- Pacejka, H.B. Tire and Vehicle Dynamics; Elsevier: Oxford, UK, 2012. [Google Scholar]
- Juan, C.; Javier, P. A Procedure for Determining Tire-Road Friction Characteristics Using a Modification of the Magic Formula Based on Experimental Results. Sensors 2018, 18, 896. [Google Scholar]
- Bakker, G.E.; Pacejka, H.B.; Lidner, L. A New Tire Model with an Application in Vehicle Dynamics Studies. SAE Paper 1989, 98, 101–113. [Google Scholar]
- Yang, S.; Feng, J.; Song, B. Research on Decoupled Optimal Control of Straight-Line Driving Stability of Electric Vehicles Driven by Four-Wheel Hub Motors. Energies 2021, 14, 5766. [Google Scholar] [CrossRef]
- Stephen, B.J.; Emmanuel, G.D.; Afeez, A.; David, O.O.; Ban, M.K. Metaheuristic algorithms for PID controller parameters tuning: Review, approaches, and, open problems. Heliyon 2022, 8, e09399. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameters | Parameters |
|---|---|
| Length × width × height | 1051 × 831 × 460 (mm) |
| Wheel track (B) | 593 (mm) |
| Wheelbase (L) | 715 (mm) |
| Working speed | 0–1.5 (m/s) |
| Drive form | Four-wheel independent drive |
| Communication interface | CAN |
| Mowing robot quality | 70 ± 1 (kg) |
| Wheel radius | 165 (mm) |
| Rated motor power | 350 (W) |
| Maximum motor speed | 1500 (rad/min) |
| Fuzzy Quantity | Fuzzy Subset |
|---|---|
| v | NB NM NS Z PS PM PB |
| Np | NB NM NM Z PM PB PB |
| ω | v | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | Z | PS | PM | PB | |
| NB | Z | PB | PM | PM | PS | Z | Z |
| NM | PM | Z | PM | PS | PS | Z | NS |
| NS | PM | PM | Z | PS | Z | NS | NS |
| Z | NS | PM | PS | Z | NS | NM | NM |
| PS | NM | PS | NM | NS | Z | NM | NM |
| PM | NM | Z | NM | NM | NM | Z | NB |
| PB | NB | Z | NB | NM | NM | NB | Z |
| PID Controller Parameters | Value |
|---|---|
| Dwelling time/s | 0.02 |
| Proportional slip rate control | 3 |
| Integral slip rate control | 1 |
| Differential slip rate control | 0.6 |
| Proportional drive wheel motor speed control | 5 |
| Integral drive wheel motor speed control | 1.6 |
| Differential drive wheel motor speed control | 0.8 |
| Basic Parameters of the Model Predictive Controller | Numerical Value |
|---|---|
| Sampling time (s) | 0.2 |
| Reference speed (m/s) | 0.6 |
| Relaxation factor weight coefficient | 10 |
| Relaxation factor, | 10 |
| Weight matrix, Q | |
| Weight matrix, R |
| Time Domain Parameters | Adaptive Time Domain Parameters | |
|---|---|---|
| Absolute value of the maximum lateral error (m) | 0.13 | 0.115 |
| Average lateral error (m) | 0.075 | 0.043 |
| Absolute value of the maximum longitudinal error (m) | 0.135 | 0.085 |
| Mean value of the longitudinal error (m) | 0.058 | 0.041 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Wang, S.; Zhang, W.; Li, H.; Zeng, Y.; Wang, T.; Fei, K.; Qiu, X.; Jiang, R.; Mai, C.; et al. Research on Path Tracking for an Orchard Mowing Robot Based on Cascaded Model Predictive Control and Anti-Slip Drive Control. Agronomy 2023, 13, 1395. https://doi.org/10.3390/agronomy13051395
Li J, Wang S, Zhang W, Li H, Zeng Y, Wang T, Fei K, Qiu X, Jiang R, Mai C, et al. Research on Path Tracking for an Orchard Mowing Robot Based on Cascaded Model Predictive Control and Anti-Slip Drive Control. Agronomy. 2023; 13(5):1395. https://doi.org/10.3390/agronomy13051395
Chicago/Turabian StyleLi, Jun, Sifan Wang, Wenyu Zhang, Haomin Li, Ye Zeng, Tao Wang, Ke Fei, Xinrui Qiu, Runpeng Jiang, Chaodong Mai, and et al. 2023. "Research on Path Tracking for an Orchard Mowing Robot Based on Cascaded Model Predictive Control and Anti-Slip Drive Control" Agronomy 13, no. 5: 1395. https://doi.org/10.3390/agronomy13051395
APA StyleLi, J., Wang, S., Zhang, W., Li, H., Zeng, Y., Wang, T., Fei, K., Qiu, X., Jiang, R., Mai, C., & Cao, Y. (2023). Research on Path Tracking for an Orchard Mowing Robot Based on Cascaded Model Predictive Control and Anti-Slip Drive Control. Agronomy, 13(5), 1395. https://doi.org/10.3390/agronomy13051395