


Web Mapping for Farm Management Information Systems: A Review and Australian Orchard Case Study




Abstract
:1. Introduction
Context
2. Background
2.1. A Primer on the GNSS
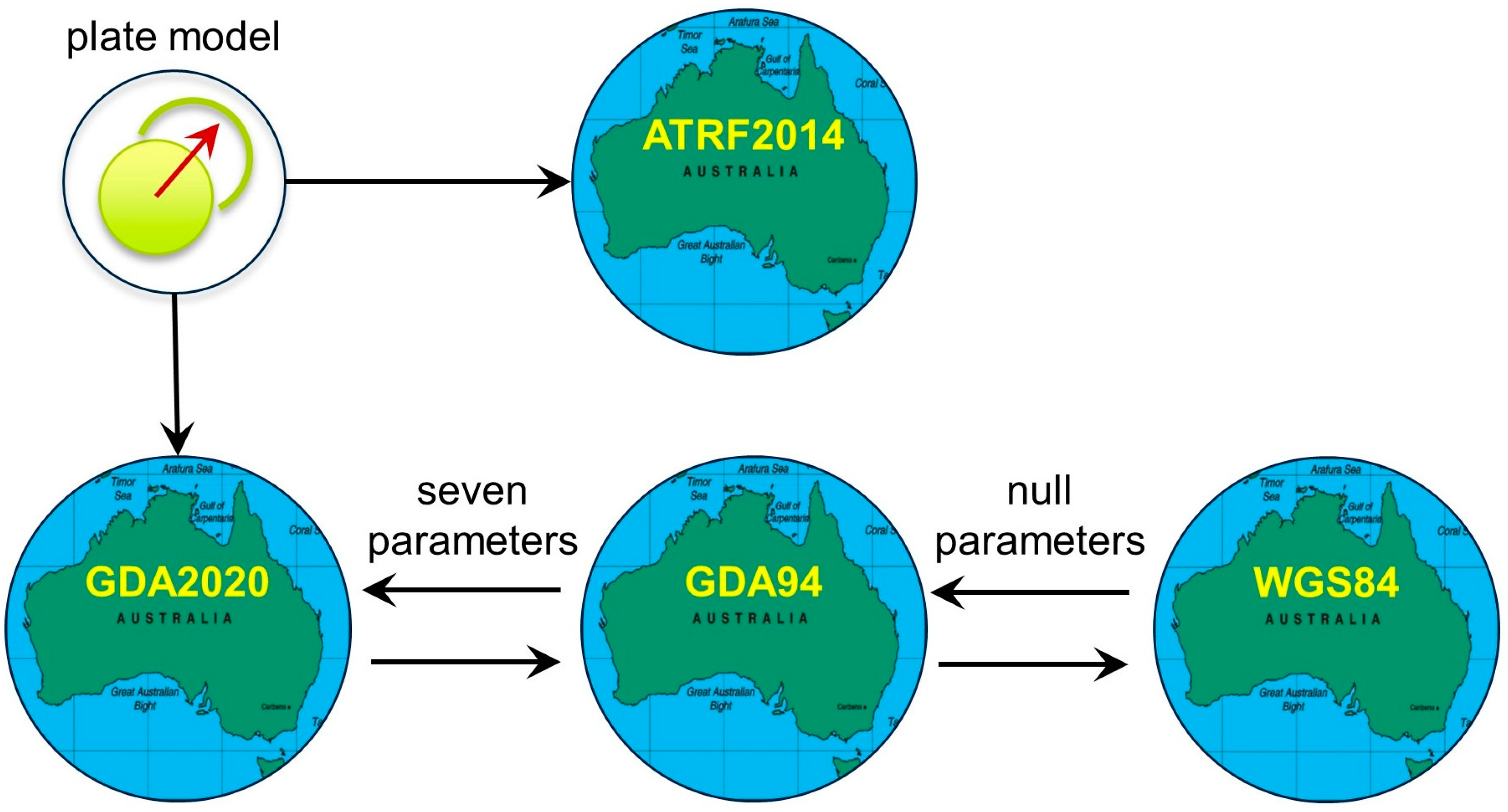
2.2. A Primer on GNSS Datums
2.3. A Primer on Web Mapping
2.4. Positional Accuracy of Web Imagery
3. Case Study Materials and Methods
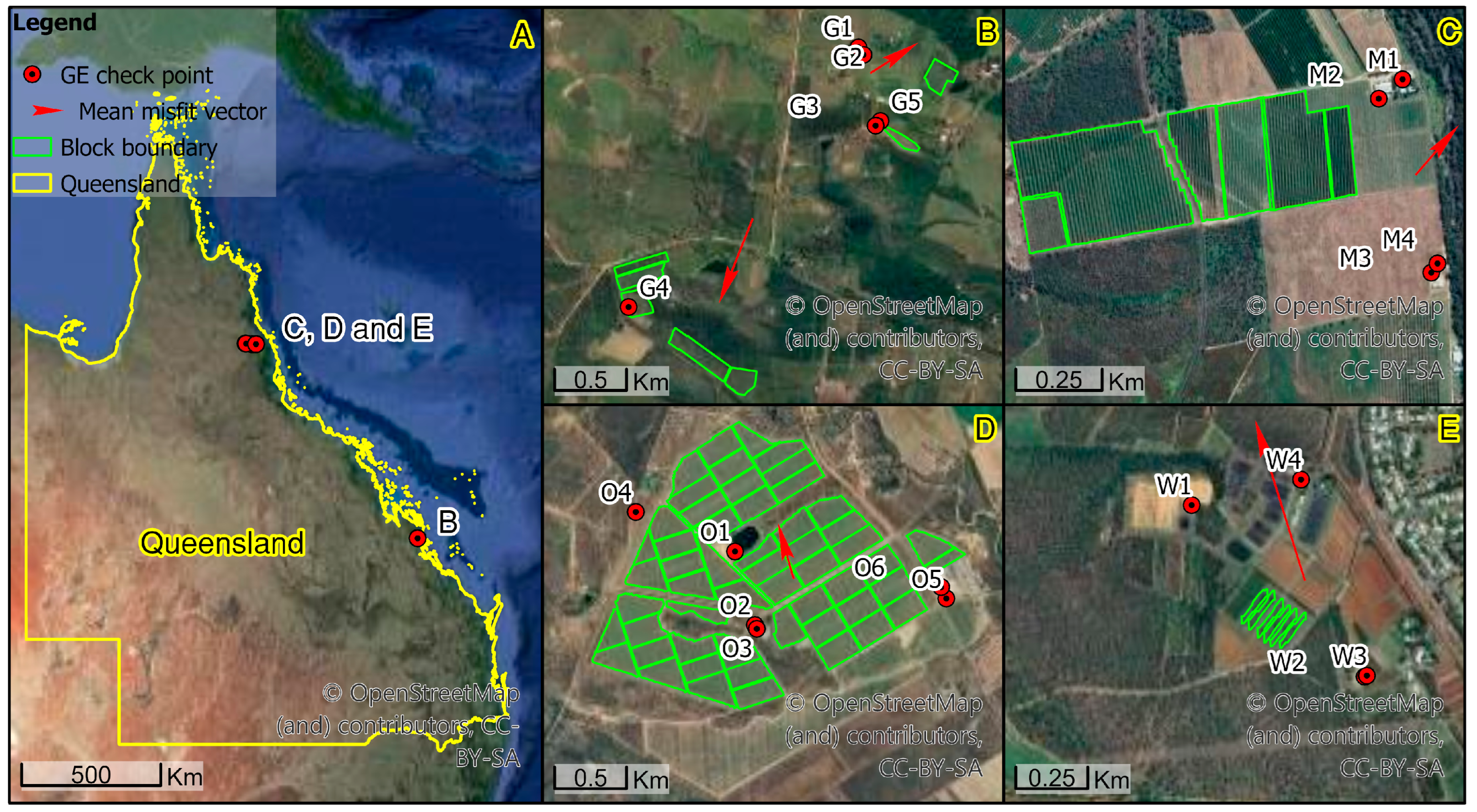
3.1. Study Area
3.2. GNSS Survey and Imagery Data
3.3. Accuracy Assessment and Position Correction
3.4. Adjustment of Misalignment
4. Case Study Results
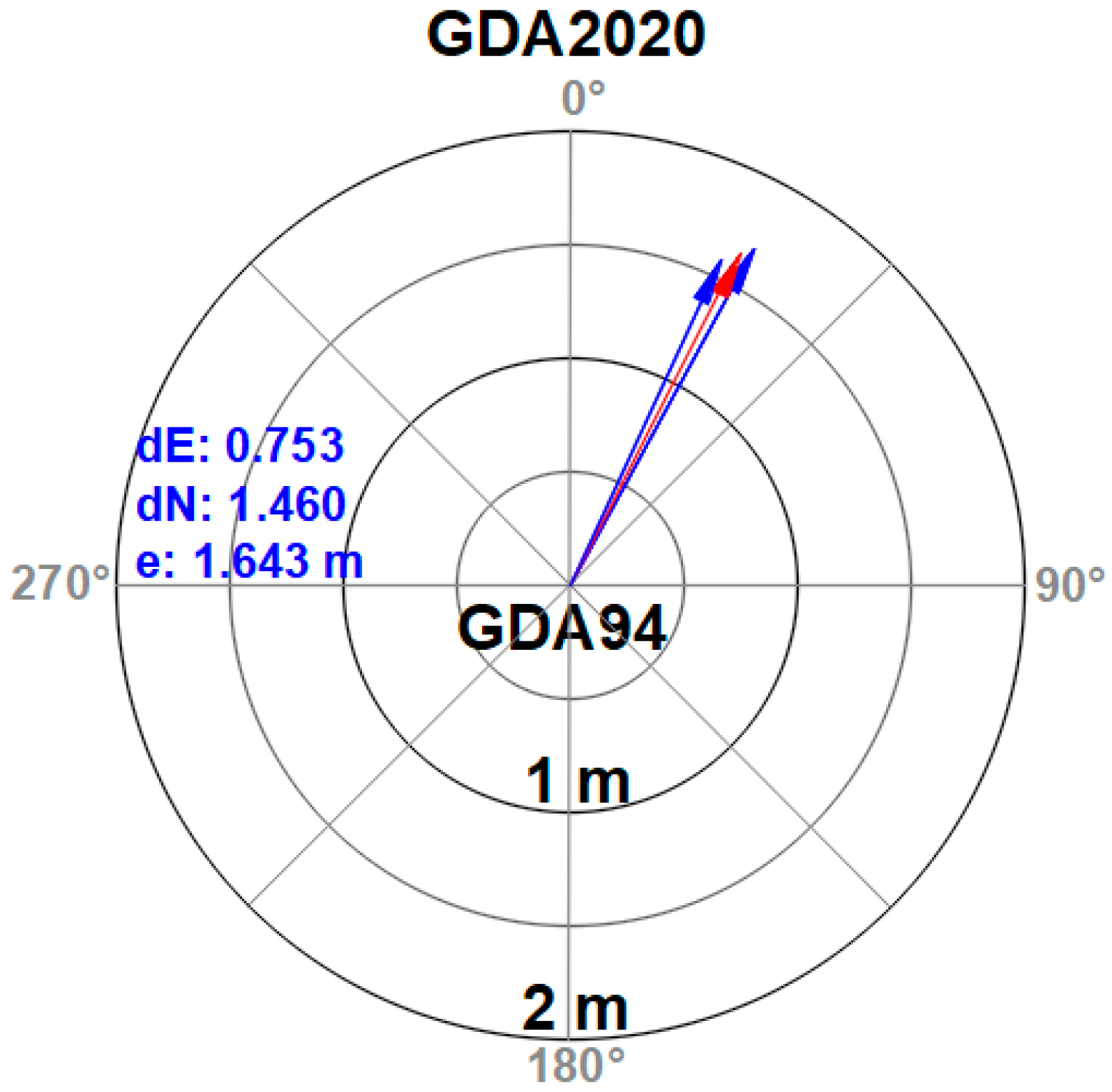
4.1. Tectonic Shift
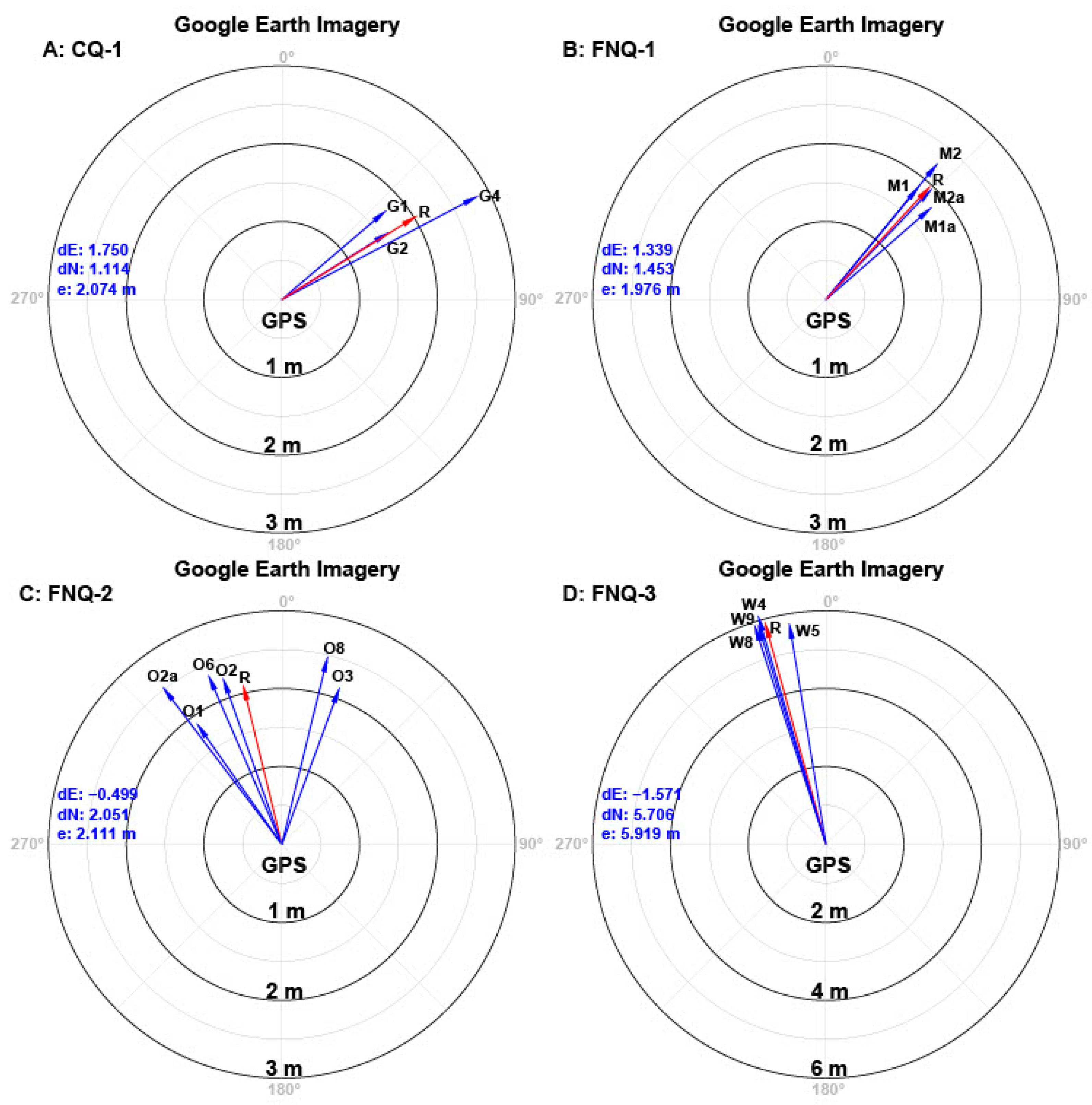
4.2. Current Imagery Misfit Vectors
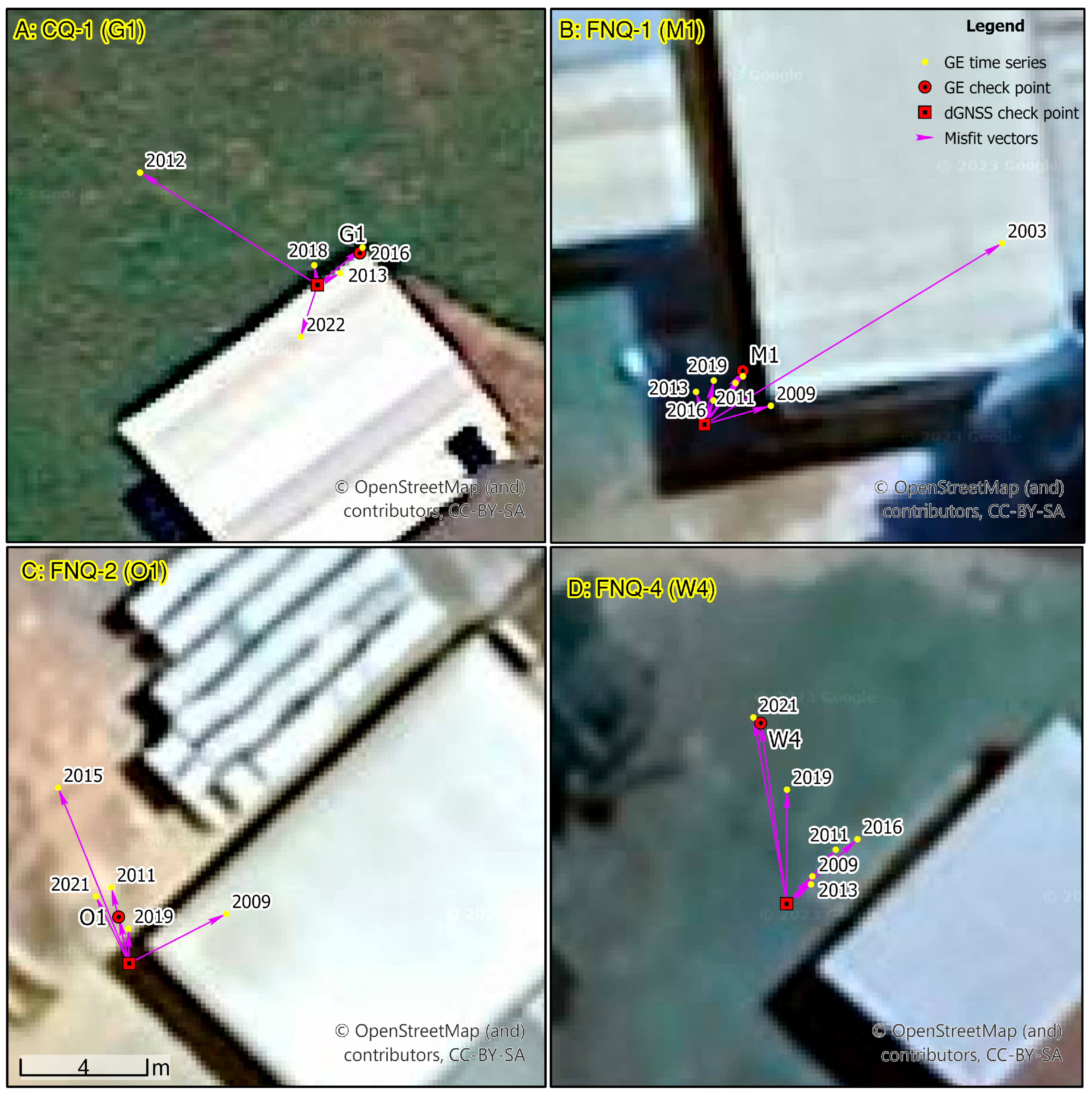
4.3. Historical Imagery Misfit Vectors
4.4. Misfit Vectors by Imagery Source
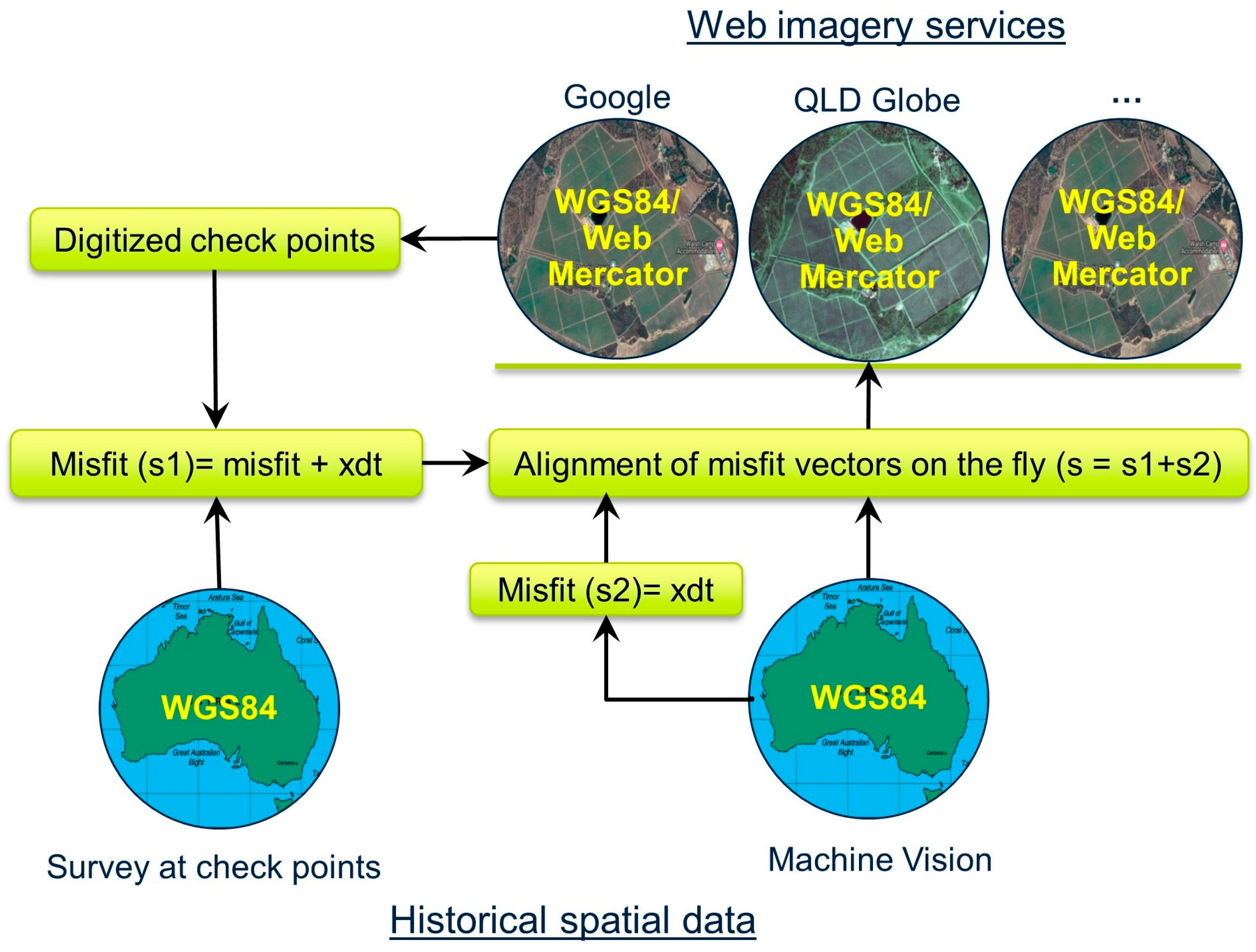
4.5. Misfit Adjustment for Web Mapping
- Establishment
- (i)
- Identify probable checkpoints in web imagery;
- (ii)
- Extract coordinates of these points using line segment intersection points;
- (iii)
- Acquire GCP location data using WGS84 (GDA2020 epoch) datum, GDA2020, or ATRF2014, or an equivalent national system;
- (iv)
- Estimate the misfit vector(s) from web imagery with respect to CPs (s1 = misfit + xdt) and plate model (s2 = xdt), where x is the magnitude of plate movement over the time interval (dt) between coordinate epoch and 2020.000 (of CP or MV) data;
- (v)
- Curate the misfit vector for each farm, each web imagery provider, and each date of the image.
- Implementation
- (i)
- Collect and curate field data with the metadata of the datum and the date of acquisition;
- (ii)
- For web map display, convert data to WGS84 (with GDA2020 epoch);
- (iii)
- Apply the misfit vector to all field-collected data ‘on-the-fly’ before display;
- (iv)
- Undertake client-side transformation WGS84 to Web Mercator datum by the web mapping application.
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Terms/Terminology | Definition |
|---|---|
| Continental/tectonic drift | The shift is due to the movement of tectonic plates. It could be specific to a continent, e.g., the Australian plate. |
| Coordinate conversion/transformation | Coordinate conversion: conversion of coordinates from geographic to projected coordinates within the same datum and vice versa. Coordinate transformation: transforming the coordinates from one datum to another datum. |
| CORS | The Continuously Operating Reference System is a network of GNSS that provides high-precision position and navigation data. |
| CS | The coordinate system is a mathematical framework to represent the spatial position of an object in space, and generally consists of two coordinate systems in mapping: geographic (degrees) and projected (metric). |
| Datum | The reference framework for the coordinates system, which defines position, orientation, and the shape of the Earth, e.g., WGS84. Datum could be local and global. Local datum: an earth model fitted to a specific area of interest, e.g., Australia. Global datum: an earth model fitted to encompass the whole Earth. |
| EPSG | The European Petroleum Survey Group denotes the specific identity of the coordinate reference system, e.g., 4326 for a WGS84 geographic coordinates system. |
| FMIS | The farm management information system is a digital software system that manages, processes, and delivers insight into data for informed decision making. |
| Geodesy | The science of measuring and understanding Earth’ surface, size, orientation, and gravitational field. |
| Georeferencing | A process of associating spatial coordinates to spatial data. |
| GNSS/DGNSS | The Global Navigation Satellite System is a satellite-based navigation system that provides location and time information. |
| GPS/DGPS | The Global Positioning System uses a network of satellites to specify the location on Earth’s surface. In DGGPS, D stands for differential, which is differentially corrected from the known station. |
| Image registration vs. rectification | Image registration: a process to align two or more images based on features. Image rectification: a process to rectify geometrical distortion in images. |
| IMU | An Inertial Measurement Unit that keeps track of the motion and orientation of the electronic device. |
| Mosaic | Mosaicking or compositing is the process of producing a seamless image from multiple imageries. |
| Orthorectification | A process of image rectification to minimize vertical distortion; the result is an orthophoto. |
| PPP | Precise point positioning is a GNSS that is used for highly accurate positioning. |
| RTK | A real-time kinematic is a satellite navigation technique used to enhance positional accuracy in real time. |
| SBAS | The satellite-based augmentation system is a system of geostationary satellites and ground stations to improve the accuracy of GNSS. |
| Spheroid/Ellipsoid/Geoid | Spheroid: a mathematical spherical model of an object in a 3D space. Ellipsoid: a mathematical elliptical model of an object with major and major axes in a 3D space. Geoid: Earth’s gravitational model to represent an equipotential surface as a reference to measure elevation. |
| Translation | The shifting of a pair of coordinates from one place to another. |
| UAV | An Unmanned Aerial Vehicle, also known as a drone, is remotely controlled by human operators to capture aerial imagery of earth surfaces. |
| UTM vs. Web Mercator | The Universal Transverse Mercator (UTM) is a cylindrical map projection system to represent Earth’s surface in a 2D space. Web Mercator, also known as Spherical Mercator, is widely used for web mapping. |
| Web map vs. web imagery | Web map: a map delivered via the web. Web imagery: imagery delivered via the web. |
| WMS | A Web Map Service is a protocol used for delivering geospatial data as web maps over the internet. |
| XYZ Tile Layer Service | A web service that provides access to map tiles to use in web mapping applications. XYZ refers to three parameters used to request map tiles: x for horizontal, y for vertical, and z for zoom level, e.g., https://example.com/Z/X/Y.png, accessed on 2 October 2023. |
Appendix B
| SN | Data | Metadata |
|---|---|---|
| 1. | Study area 1 | Location: Central Queensland, Country: Australia, Coordinate_epoch: 24 March 2022, Datum: WGS84, EPSG: 4326, Author: Central Queensland University |
| 2. | Study area 2 | Location: Far North Queensland, Country: Australia, Coordinate_epoch: 10 November 2022, Datum: WGS84, EPSG: 4326, Author: Central Queensland University |
| 3. | GE imagery CQ-1 | Location: Central Queensland, Country: Australia, Coordinate_epoch: 13 May 2016, Datum: WGS84, EPSG: 3857, Author: Central Queensland University |
| 4. | GE imagery FNQ-1 | Location: Central Queensland, Country: Australia, Coordinate_epoch: 13 May 2016, Datum: WGS84, EPSG: 3857, Author: Central Queensland University |
| 5. | GE imagery FNQ-2 | Location: Far North Queensland, Country: Australia, Coordinate_epoch: 18 July 2021, Datum: WGS84, EPSG: 3857, Author: Central Queensland University |
| 6. | GE imagery FNQ-3 | Location: Far North Queensland, Country: Australia, Coordinate_epoch: 18 July 2021, Datum: WGS84, EPSG: 3857, Author: Central Queensland University |
| 7. | MV data | Location: Far North Queensland, Country: Australia, Coordinate_epoch: 21 August 2022, Datum: WGS84, EPSG: 4326, Author: Central Queensland University |
- Data capture: Generally, GNSS spatial data are captured in the geographic coordinates of the World Geodetic System 1984 (WGS84), a global datum, requiring transformation into a local datum.
- Datum: For mapping in Australia, the Geoscience of Australia recommended local datum was the Geocentric Datum of Australia 1994 (GDA94) until 2017 and GDA2020 until 2030.
- Coordinate conversion: Geographic coordinates can be converted to projected coordinates and vice versa within the same datum. For example, the conversion of geographic coordinates to projected coordinates is only possible within the GDA94 datum, i.e., (GDA94)geographic ⇔ (GDA94)projected and (GDA2020)geographic ⇔ (GDA2020)projected or (WGS84)geographic ⇔ (WGS84)projected.
- Coordinate transformation: Geographic coordinates can be transformed from one datum to another. Datum could be local or global. If coordinates are in the projected coordinates system, they should be converted into the geographic coordinates system first. For example, (WGS84)geographic ⇔ (GDA94)geographic or (WGS84)projected => (WGS84)geographic ⇔ (GDA94)geographic => (GDA94)projected.
- Web map: If it is necessary that data be displayed on a web map, a misfit vector should be established empirically between the GNSS data and the specific web map, with this vector applied to all data before display.
References
- Li, X.; Barriot, J.-P.; Lou, Y.; Zhang, W.; Li, P.; Shi, C. Towards Millimeter-Level Accuracy in GNSS-Based Space Geodesy: A Review of Error Budget for GNSS Precise Point Positioning. Surv. Geophys. 2023, 44, 1–90. [Google Scholar] [CrossRef]
- Realini, E.; Caldera, S.; Pertusini, L.; Sampietro, D. Precise GNSS positioning using smart devices. Sensors 2017, 17, 2434. [Google Scholar] [CrossRef] [PubMed]
- Fontana, R.; Latterman, D. GPS Modernization and the Future. In Proceedings of the IAIN World Congress and the 56th Annual Meeting of The Institute of Navigation, San Diego, CA, USA, 26–28 June 2000. [Google Scholar]
- Controlled Traffic Farming. What Is Controlled Traffic Farming? 2023. Available online: https://www.actfa.net/controlled-traffic-farming/ (accessed on 12 April 2023).
- Gómez-Candón, D.; De Castro, A.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef]
- Anderson, N.T.; Walsh, K.B.; Koirala, A.; Wang, Z.; Amaral, M.H.; Dickinson, G.R.; Sinha, P.; Robson, A.J. Estimation of Fruit Load in Australian Mango Orchards Using Machine Vision. Agronomy 2021, 11, 1711. [Google Scholar] [CrossRef]
- Jabir, B.; Falih, N.; Rahmani, K. Accuracy and efficiency comparison of object detection open-source models. Int. J. Online Biomed. Eng. 2021, 17, 165. [Google Scholar] [CrossRef]
- Dorman, M. Introduction to Web Mapping, 1st ed.; Chapman and Hall/CRC: Boca Raton, FL, USA, 2020; p. 366. [Google Scholar]
- Tsiropoulos, Z.; Fountas, S. Farm management information system for fruit orchards. In Precision Agriculture’15; Wageningen Academic Publishers: Wageningen, The Netherlands, 2015; pp. 44–55. [Google Scholar]
- Jones, V.P.; Brunner, J.F.; Grove, G.G.; Petit, B.; Tangren, G.V.; Jones, W.E. A web-based decision support system to enhance IPM programs in Washington tree fruit. Pest Manag. Sci. Former. Pestic. Sci. 2010, 66, 587–595. [Google Scholar] [CrossRef] [PubMed]
- Forcén-Muñoz, M.; Pavón-Pulido, N.; López-Riquelme, J.A.; Temnani-Rajjaf, A.; Berríos, P.; Morais, R.; Pérez-Pastor, A. Irriman platform: Enhancing farming sustainability through cloud computing techniques for irrigation management. Sensors 2021, 22, 228. [Google Scholar] [CrossRef]
- Zuo, R.; Yin, B. Google Earth-aided visualization and interpretation of geochemical survey data. Geochem. Explor. Environ. Anal. 2022, 22, 2. [Google Scholar] [CrossRef]
- Baselga, S.; Olsen, M.J. Approximations, errors, and misconceptions in the use of map projections. Math. Probl. Eng. 2021, 2021, 1094602. [Google Scholar] [CrossRef]
- USA, GPS Accuracy. 2023. Available online: https://www.gps.gov/systems/gps/performance/accuracy/ (accessed on 12 April 2023).
- Catapult. Demystifying Sample Rate in Satellite-Based Athlete Tracking Technologies. 2023. Available online: https://www.catapultsports.com/blog/sample-rate-satellite-athlete-tracking-technologies (accessed on 17 April 2023).
- Claughton, D.; Coon, A. Inmarsat I-4F1 Satellite Outage Disables Tractor GPS Services for Farming Operations and Some Maritime Safety. 2023. Available online: https://www.abc.net.au/news/rural/2023-04-18/inmarsat-i-4f1-satelite-outage-asia-pacific-gps-farms/102234678 (accessed on 24 April 2023).
- Ginan. Ginan: GNSS Analysis Centre Software. 2023. Available online: https://www.ga.gov.au/scientific-topics/positioning-navigation/positioning-australia/about-the-program/analysis-centre-software (accessed on 24 April 2023).
- Zueva, A.; Novikov, E.; Pleshakov, D.; Gusev, I. System of Geodetic parameters. In Proceedings of the 9th Meeting of the International Committee on GNSS (ICG-9), Prague, Czech Republic, 10–14 November 2014; Available online: https://www.unoosa.org/pdf/icg/2014/icg-9/icg-9-jointstatement.pdf (accessed on 2 October 2023).
- Gendt, G.; Altamimi, Z.; Dach, R.; Söhne, W.; Springer, T.; Team, T.G.P. GGSP: Realisation and maintenance of the Galileo terrestrial reference frame. Adv. Space Res. 2011, 47, 174–185. [Google Scholar] [CrossRef]
- Kelly, K.M.; Dennis, M.L. Transforming between WGS84 realizations. J. Surv. Eng. 2022, 148, 04021031. [Google Scholar] [CrossRef]
- Donnelly, N.; Crook, C.; Haasdyk, J.; Harrison, C.; Rizos, C.; Roberts, C.; Stanaway, R. Dynamic datum transformations in Australia and New Zealand. Proc. Res. Locate 2014, 14, 48–59. [Google Scholar]
- Geoscience Australia. WGS84. 2023. Available online: https://www.ga.gov.au/scientific-topics/positioning-navigation/wgs84 (accessed on 20 March 2023).
- ISO 19115-2:2019(en); Geographic Information—Metadata—Part 2: Extensions for Acquisition and Processing. OBP: Geneva, Switzerland, 2023. Available online: https://www.iso.org/obp/ui/#iso:std:iso:19115:-2:ed-2:v1:en (accessed on 2 May 2023).
- AS/NZS ISO 19115.2:2019; Geographic Information—Metadata—Part 2: Extensions for Acquisition and Processing. Standards New Zealand: Wellington, New Zealand, 2023. Available online: https://www.standards.govt.nz/shop/asnzs-iso-19115-22019/ (accessed on 2 May 2023).
- GCJ-02. GCJ-02 Explained: The Chinese Coordinate System—For Developers. 2023. Available online: https://hackernoon.com/why-mapbox-was-the-best-tech-partner-for-my-chinese-coordinate-system-development-azo737mo (accessed on 24 April 2023).
- ATRF. Australian Terrestrial Reference Frame. 2023. Available online: https://www.icsm.gov.au/australian-terrestrial-reference-frame (accessed on 24 April 2023).
- ICSM. Geocentric Datum of Australia 2020. 2023. Available online: https://www.icsm.gov.au/gda2020 (accessed on 20 April 2023).
- Federal Register of Legislation. National Measurement Act 1960—Recognized-Value Standard of Measurement of Position 2012 (No. 1). 2023. Available online: https://www.legislation.gov.au/Details/F2012L00800 (accessed on 20 April 2023).
- Featherstone, W.E. An updated explanation of the geocentric datum of Australia (GDA) and its effects upon future mapping. Aust. Surv. 1996, 41, 121–130. [Google Scholar] [CrossRef]
- Maptiler. EPSG.io: Find Coordinate Systems Worldwide. 2023. Available online: https://epsg.io/about (accessed on 5 May 2023).
- Haasdyk, J.; Janssen, V. The many paths to a common ground: A comparison of transformations between GDA94 and ITRF. In Proceedings of the International Global Navigation Satellite Systems Society, IGNSS Symposium, University of New South Wales. Sydney, NSW, Australia, 15–17 November 2011. [Google Scholar]
- Veenendaal, B.; Brovelli, M.A.; Li, S. Review of web mapping: Eras, trends and directions. ISPRS Int. J. Geo-Inf. 2017, 6, 317. [Google Scholar] [CrossRef]
- Beeflamb. User Guide: Use Google My Maps to Map Your Farm. 2023. Available online: https://beeflambnz.com/knowledge-hub/PDF/use-google-my-maps-map-your-farm.pdf (accessed on 4 May 2023).
- ESRI. Esri Australia Technical Blog. 2023. Available online: https://esriaustraliatechblog.wordpress.com/tag/gda2020/ (accessed on 2 May 2023).
- Zhang, M.; Mei, J. The design and implementation of electronic farm system based on Google Maps. In Proceedings of the 2010 Third International Symposium on Intelligent Information Technology and Security Informatics, Jian, China, 2–4 April 2010. [Google Scholar]
- Hu, S.; Dai, T. Online map application development using Google Maps API, SQL database, and ASP.NET. Int. J. Inf. Commun. Technol. Res. 2013, 3, 102–110. [Google Scholar]
- Barnes, A.; White, R. Mapping emotions: Exploring the impact of the Aussie Farms Map. J. Contemp. Crim. Justice 2020, 36, 303–326. [Google Scholar] [CrossRef]
- Chen, A.; Leptoukh, G.; Kempler, S.; Lynnes, C.; Savtchenko, A.; Nadeau, D.; Farley, J. Visualization of A-Train vertical profiles using Google Earth. Comput. Geosci. 2009, 35, 419–427. [Google Scholar] [CrossRef]
- Benham, P.M.; Beckman, E.J.; DuBay, S.G.; Flores, L.M.; Johnson, A.B.; Lelevier, M.J.; Schmitt, C.J.; Wright, N.A.; Witt, C.C. Satellite imagery reveals new critical habitat for endangered bird species in the high Andes of Peru. Endanger. Species Res. 2011, 13, 145–157. [Google Scholar] [CrossRef]
- Battersby, S.E.; Finn, M.P.; Usery, E.L.; Yamamoto, K.H. Implications of web Mercator and its use in online mapping. Cartogr. Int. J. Geogr. Inf. Geovis. 2014, 49, 85–101. [Google Scholar] [CrossRef]
- Schmidt, C. OpenLayers: Free Maps for the Web. 2023. Available online: http://www.openlayers.org/ (accessed on 7 August 2023).
- Haklay, M.; Weber, P. Openstreetmap: User-generated street maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Guo, H.; Annoni, A.; Bian, L.; De Bie, K.; Campbell, F.; Craglia, M.; Ehlers, M.; Van Genderen, J.; Jackson, D. Next-generation digital earth. Proc. Natl. Acad. Sci. USA 2012, 109, 11088–11094. [Google Scholar] [CrossRef] [PubMed]
- Lesiv, M.; See, L.; Laso Bayas, J.C.; Sturn, T.; Schepaschenko, D.; Karner, M.; Moorthy, I.; McCallum, I.; Fritz, S. Characterizing the spatial and temporal availability of very high resolution satellite imagery in google earth and microsoft bing maps as a source of reference data. Land 2018, 7, 118. [Google Scholar] [CrossRef]
- Dmistry, S. A Short Guide to the Chinese Coordinate System. GCJ-02(gcj 02) Explained. 2023. Available online: https://abstractkitchen.com/blog/a-short-guide-to-chinese-coordinate-system/ (accessed on 4 May 2023).
- Yu, L.; Gong, P. Google Earth as a virtual globe tool for Earth science applications at the global scale: Progress and perspectives. Int. J. Remote Sens. 2012, 33, 3966–3986. [Google Scholar] [CrossRef]
- Potere, D. Horizontal positional accuracy of Google Earth’s high-resolution imagery archive. Sensors 2008, 8, 7973–7981. [Google Scholar] [CrossRef]
- State of Queensland. Queensland Imagery: Latest State Program. 2023. Available online: https://spatial-img.information.qld.gov.au:443/arcgis/rest/services/Basemaps/LatestStateProgram_AllUsers/ImageServer (accessed on 4 April 2023).
- Zhang, C.; Valente, J.; Kooistra, L.; Guo, L.; Wang, W. Opportunities of UAVs in orchard management. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 673–680. [Google Scholar] [CrossRef]
- NGA (National Geospatial-Intelligence Agency). NGA standardization document, Map Projections for GEOINT Content, Products, and Applications National Center for Geospatial Intelligence Standards: 3838 Vogel Road, Arnold. 2017. Available online: https://earth-info.nga.mil/php/download.php?file=coord-mapproj (accessed on 2 October 2023).
- Gómez-Candón, D.; López-Granados, F.; Caballero-Novella, J.J.; Pena-Barragán, J.M.; García-Torres, L. Understanding the errors in input prescription maps based on high spatial resolution remote sensing images. Precis. Agric. 2012, 13, 581–593. [Google Scholar] [CrossRef]
- Goudarzi, M.A.; Landry, R.J. Assessing horizontal positional accuracy of Google Earth imagery in the city of Montreal, Canada. Geod. Cartogr. 2017, 43, 56–65. [Google Scholar] [CrossRef]
- Mohammed, N.Z.; Ghazi, A.; Mustafa, H.E. Positional accuracy testing of Google Earth. Int. J. Multidiscip. Sci. Eng. 2013, 4, 6–9. [Google Scholar]
- Pulighe, G.; Baiocchi, V.; Lupia, F. Horizontal accuracy assessment of very high resolution Google Earth images in the city of Rome, Italy. Int. J. Digit. Earth 2016, 9, 342–362. [Google Scholar] [CrossRef]
- Mulu, Y.A.; Derib, S.D. Positional Accuracy Evaluation of Google Earth in Addis Ababa, Ethiopia. Artif. Satell. 2019, 54, 43–56. [Google Scholar] [CrossRef]
- Methakullachat, D.; Witchayangkoon, B. Coordinates comparison of Goolge® Maps and orthophoto maps in Thailand. Int. Trans. J. Eng. Manag. Appl. Sci. Technol. 2019, 10, 1–8. [Google Scholar]
- Pendleton, C. The world according to Bing. IEEE Comput. Graph. Appl. 2010, 30, 15–17. [Google Scholar] [CrossRef]
- HxGN SmartNet Aus. 2023. Available online: https://hxgnsmartnet.com/en-au/services/customer-login (accessed on 12 April 2023).
- Von Gioi, R.G.; Jakubowicz, J.; Morel, J.-M.; Randall, G. LSD: A line segment detector. Image Process. On Line 2012, 2, 35–55. [Google Scholar] [CrossRef]
- Queensland Government. Survey Control Mark Report. 2023. Available online: http://qspatial.information.qld.gov.au (accessed on 22 March 2023).
- Benchmrk. The Most Accurate Locations in Australia. 2023. Available online: https://geolocarta.com/benchmrk (accessed on 13 April 2023).
- ASPRS. ASPRS positional accuracy standards for digital geospatial data. Photogramm. Eng. Remote Sens. 2015, 81, A1–A26. [Google Scholar] [CrossRef]
- FGDC. Geospatial Positioning Accuracy Standards Part 3: National Standard for Spatial Data Accuracy; National Aeronautics and Space Administration: Virginia, NV, USA, 1998.
- Kraus, K. Photogrammetry: Geometry from Images and Laser Scans; Walter de Gruyter: Berlin, Germany, 2007; Volume 1. [Google Scholar]
- Janssen, V. GDA2020, AUSGeoid2020 and ATRF: An introduction. In Proceedings of the Association of Public Authority Surveyors Conference (APAS2017), Shoal Bay, Australia, 20–22 March 2017. [Google Scholar]


| Farm | Latitude (°) | Longitude (°) | Elevation (m) | Landscape | Survey Date |
|---|---|---|---|---|---|
| CQ-1 | 23.025080 | 150.641167 | 50–81 | Hilly | 24 March 2022 |
| FNQ-1 | 17.131778 | 145.303059 | 499–521 | Plain | 10 November 2023 |
| FNQ-2 | 17.112235 | 145.100360 | 459–501 | Plain | 10 November 2023 |
| FNQ-3 | 17.134072 | 145.427091 | 587–591 | Plain | 10 November 2023 |
| Farm | SCM | GDA94 Coordinates | GDA20 Coordinates | Misfit Vectors | |||
|---|---|---|---|---|---|---|---|
| Latitude (°) | Longitude (°) | Latitude (°) | Longitude (°) | Magnitude (m) | Bearing (°) | ||
| CQ-1 | 147698 | −23.032350 | 150.629297 | −23.032338 | 150.629304 | 1.581 | 25.1876 |
| CQ-2 | 046749 | −23.313954 | 150.517036 | −23.313941 | 150.517043 | 1.580 | 24.9753 |
| FNQ-1 | 073155 | −17.115310 | 145.283933 | −17.115297 | 145.283940 | 1.687 | 28.6620 |
| FNQ-2 | 140459 | −17.132102 | 145.098745 | −17.132088 | 145.098752 | 1.687 | 28.5861 |
| FNQ-3 | 208477 | −17.126252 | 145.425309 | −17.126239 | 145.425317 | 1.684 | 28.7109 |
| Mean misfit vector | 1.643 | 27.2794 | |||||
| Farm | CP | GNSS Coordinates | GEI Coordinates | Misfit Vectors | |||
|---|---|---|---|---|---|---|---|
| Latitude (°) | Longitude (°) | Latitude (°) | Longitude (°) | Magnitude (m) | Bearing (°) | ||
| CQ-1 | G1 | −23.019277 | 150.635479 | −23.019268 | 150.635491 | 1.768 | 49.5702 |
| G2 | −23.019747 | 150.635811 | −23.019739 | 150.635825 | 1.628 | 57.9389 | |
| G3 | −23.024222 | 150.636543 | −23.024210 | 150.636568 | 2.854 | 62.2218 | |
| Mean misfit vector in 2016 | 2.074 | 57.5329 | |||||
| G4 | −23.035339 | 150.619628 | −23.035369 | 150.619612 | 3.661 | 205.1533 | |
| G5 | −23.023893 | 150.636911 | −23.023918 | 150.636902 | 2.897 | 197.2232 | |
| Mean misfit vector in 2022 | 3.271 | 201.6509 | |||||
| FNQ-1 | M1 | −17.131629 | 145.303576 | −17.131613 | 145.303587 | 1.883 | 39.4433 |
| M2 | −17.132104 | 145.302916 | −17.132092 | 145.302924 | 1.804 | 48.9154 | |
| M3 | −17.136690 | 145.304139 | −17.136673 | 145.304154 | 2.263 | 39.3829 | |
| M4 | −17.136450 | 145.304314 | −17.136441 | 145.304331 | 1.970 | 43.7701 | |
| Mean misfit vector in 2021 | 1.976 | 42.6576 | |||||
| FNQ-2 | O1 | −17.109832 | 145.086829 | −17.109819 | 145.086826 | 1.897 | 324.8323 |
| O2 | −17.114471 | 145.087914 | −17.114457 | 145.087916 | 2.266 | 340.4727 | |
| O3 | −17.114718 | 145.088043 | −17.114699 | 145.088031 | 2.533 | 322.8433 | |
| O4 | −17.107115 | 145.080498 | −17.107099 | 145.080504 | 2.146 | 20.2694 | |
| O5 | −17.113312 | 145.100384 | −17.113289 | 145.100384 | 2.372 | 336.5229 | |
| O6 | −17.112584 | 145.100071 | −17.112566 | 145.100081 | 2.482 | 13.7519 | |
| Mean misfit vector in 2021 | 2.111 | 346.3344 | |||||
| FNQ-3 | W4 | −17.129009 | 145.423667 | −17.128958 | 145.423660 | 5.758 | 350.5385 |
| W1 | −17.129677 | 145.420099 | −17.129622 | 145.420084 | 6.131 | 343.4351 | |
| W2 | −17.135245 | 145.425488 | −17.135193 | 145.425472 | 5.928 | 341.8832 | |
| W3 | −17.135216 | 145.425558 | −17.135162 | 145.425542 | 5.898 | 342.7705 | |
| Mean misfit vector in 2021 | 5.919 | 344.6045 | |||||
| Farm/CP | Imagery Date | GEI Coordinates | Misfit Vectors | ||
|---|---|---|---|---|---|
| Latitude (°) | Longitude (°) | Magnitude (m) | Bearing (°) | ||
| CQ-1/G1 | 2 August 2012 | −23.019245 | 150.635429 | 6.178747 | 303.3369 |
| 5 August 2013 | −23.019274 | 150.635485 | 0.784156 | 65.3325 | |
| 13 May 2016 | −23.019266 | 150.635492 | 1.767559 | 49.5702 | |
| 19 January 2018 | −23.019271 | 150.635478 | 0.569779 | 354.9467 | |
| 11 February 2022 | −23.019292 | 150.635474 | 1.733135 | 193.8136 | |
| Mean misfit vector | 1.036 | 316.4531 | |||
| FNQ-1/M1 | 15 July 2003 | −17.131577 | 145.303660 | 10.633708 | 237.1640 |
| 10 July 2009 | −17.131623 | 145.303595 | 2.089216 | 253.0876 | |
| 18 June 2011 | −17.131617 | 145.303585 | 1.603096 | 215.3983 | |
| 28 June 2013 | −17.131619 | 145.303574 | 1.057875 | 165.7280 | |
| 25 September 2016 | −17.131622 | 145.303578 | 0.806052 | 199.0387 | |
| 14 July 2019 | −17.131616 | 145.303579 | 1.408654 | 190.9744 | |
| 10 April 2021 | −17.131615 | 145.303587 | 1.909719 | 217.0331 | |
| Mean misfit vector | 2.593 | 227.0259 | |||
| FNQ-2/O1 | 10 July 2009 | −17.109818 | 145.086856 | 3.317411 | 241.4570 |
| 19 August 2011 | −17.109811 | 145.086824 | 2.445809 | 166.6781 | |
| 15 September 2015 | −17.109782 | 145.086809 | 5.909510 | 158.1297 | |
| 14 July 2019 | −17.109822 | 145.086829 | 1.087267 | 178.4557 | |
| 15 June 2021 | −17.109813 | 145.086819 | 2.329465 | 153.7840 | |
| Mean misfit vector | 2.532 | 175.8819 | |||
| FNQ-3/W4 | 8 December 2009 | −17.129002 | 145.423675 | 1.158942 | 221.7447 |
| 18 June 2011 | −17.128994 | 145.423681 | 2.242521 | 220.8642 | |
| 28 June 2013 | −17.129004 | 145.423674 | 0.952090 | 230.1685 | |
| 25 September 2016 | −17.128991 | 145.423688 | 2.937458 | 226.3162 | |
| 14 July 2019 | −17.128977 | 145.423668 | 3.568632 | 179.7362 | |
| 18 July 2021 | −17.128957 | 145.423658 | 5.915459 | 169.8191 | |
| Mean misfit vector | 2.523 | 195.4489 | |||
| Farm/CP | Misfit Vectors in Web Imagery | |||||||
|---|---|---|---|---|---|---|---|---|
| Bing | ESRI | QLD Globe | ||||||
| Magnitude (m) | Bearing (°) | Magnitude (m) | Bearing (°) | Magnitude (m) | Bearing (°) | Magnitude (m) | Bearing (°) | |
| CQ-1/G1 | 5.712 | 225.053691 | 1.768 | 49.570205 | 1.141 | 251.483588 | 0.429 | 69.585256 |
| FNQ-1/M1 | 2.357 | 218.344693 | 1.883 | 219.443312 | 4.218 | 261.485087 | 1.919 | 190.089089 |
| FNQ-2/O1 | 4.049 | 268.553544 | 1.897 | 144.832330 | 2.596 | 290.962091 | 4.306 | 114.349462 |
| FNQ-3/W4 | 4.774 | 164.826241 | 5.758 | 170.538496 | 1.918 | 306.876470 | 1.024 | 161.457136 |
| Mean | 3.365 | 218.086680 | 1.963 | 163.813842 | 2.319 | 276.766311 | 1.556 | 136.118854 |
| Imagery | RMSEx (m) | RSMEy (m) | RMSExy (m) |
|---|---|---|---|
| Bing | 3.018 | 3.199 | 4.398 |
| 1.155 | 3.086 | 3.295 | |
| ESRI | 2.588 | 0.823 | 2.716 |
| QLD | 1.985 | 1.386 | 2.421 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dhonju, H.K.; Walsh, K.B.; Bhattarai, T. Web Mapping for Farm Management Information Systems: A Review and Australian Orchard Case Study. Agronomy 2023, 13, 2563. https://doi.org/10.3390/agronomy13102563
Dhonju HK, Walsh KB, Bhattarai T. Web Mapping for Farm Management Information Systems: A Review and Australian Orchard Case Study. Agronomy. 2023; 13(10):2563. https://doi.org/10.3390/agronomy13102563
Chicago/Turabian StyleDhonju, Hari Krishna, Kerry Brian Walsh, and Thakur Bhattarai. 2023. "Web Mapping for Farm Management Information Systems: A Review and Australian Orchard Case Study" Agronomy 13, no. 10: 2563. https://doi.org/10.3390/agronomy13102563
APA StyleDhonju, H. K., Walsh, K. B., & Bhattarai, T. (2023). Web Mapping for Farm Management Information Systems: A Review and Australian Orchard Case Study. Agronomy, 13(10), 2563. https://doi.org/10.3390/agronomy13102563