
Key Technologies for an Orchard Variable-Rate Sprayer: Current Status and Future Prospects

 ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Detection unit
2.1. Target Parameter Detection
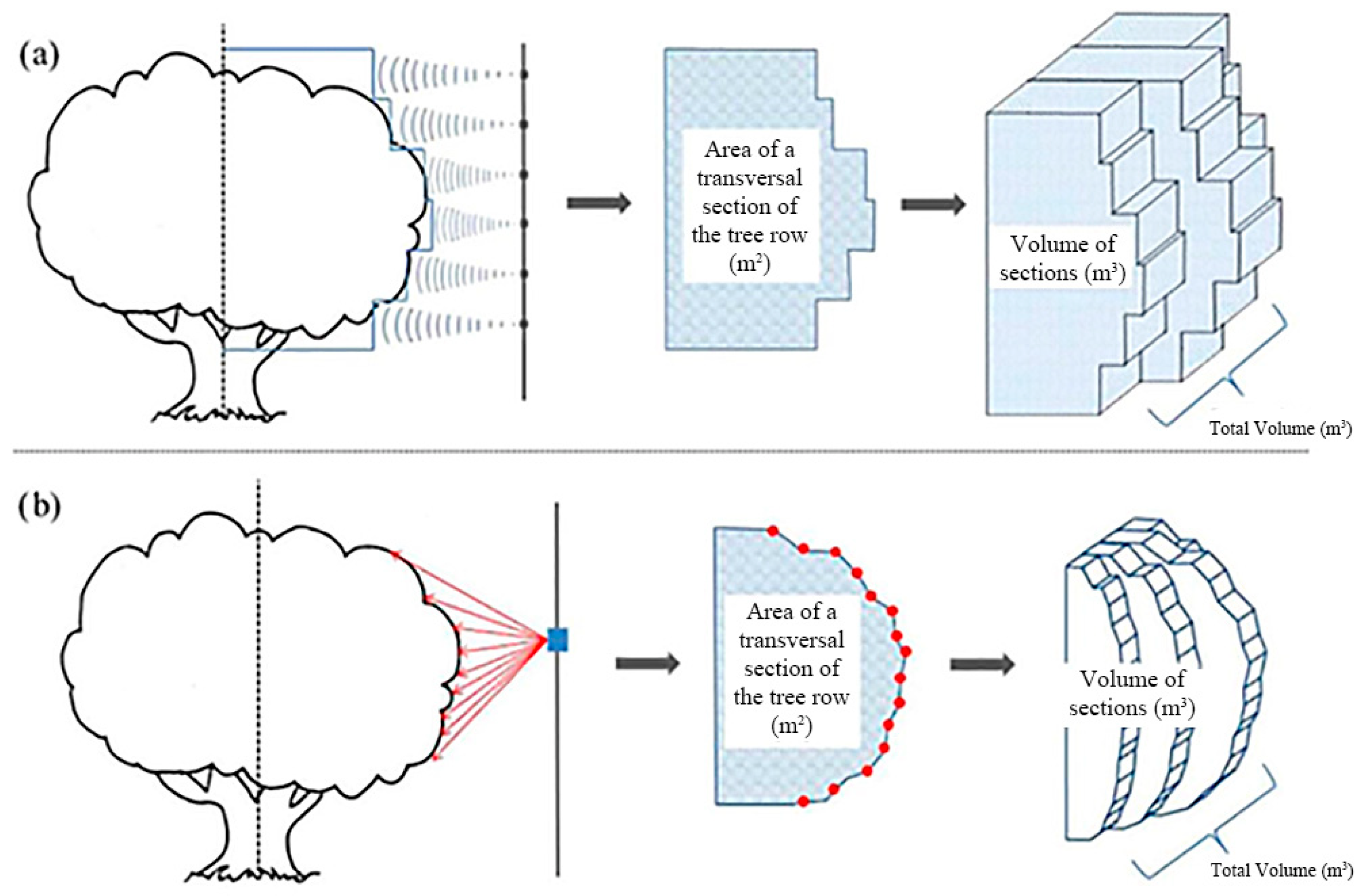
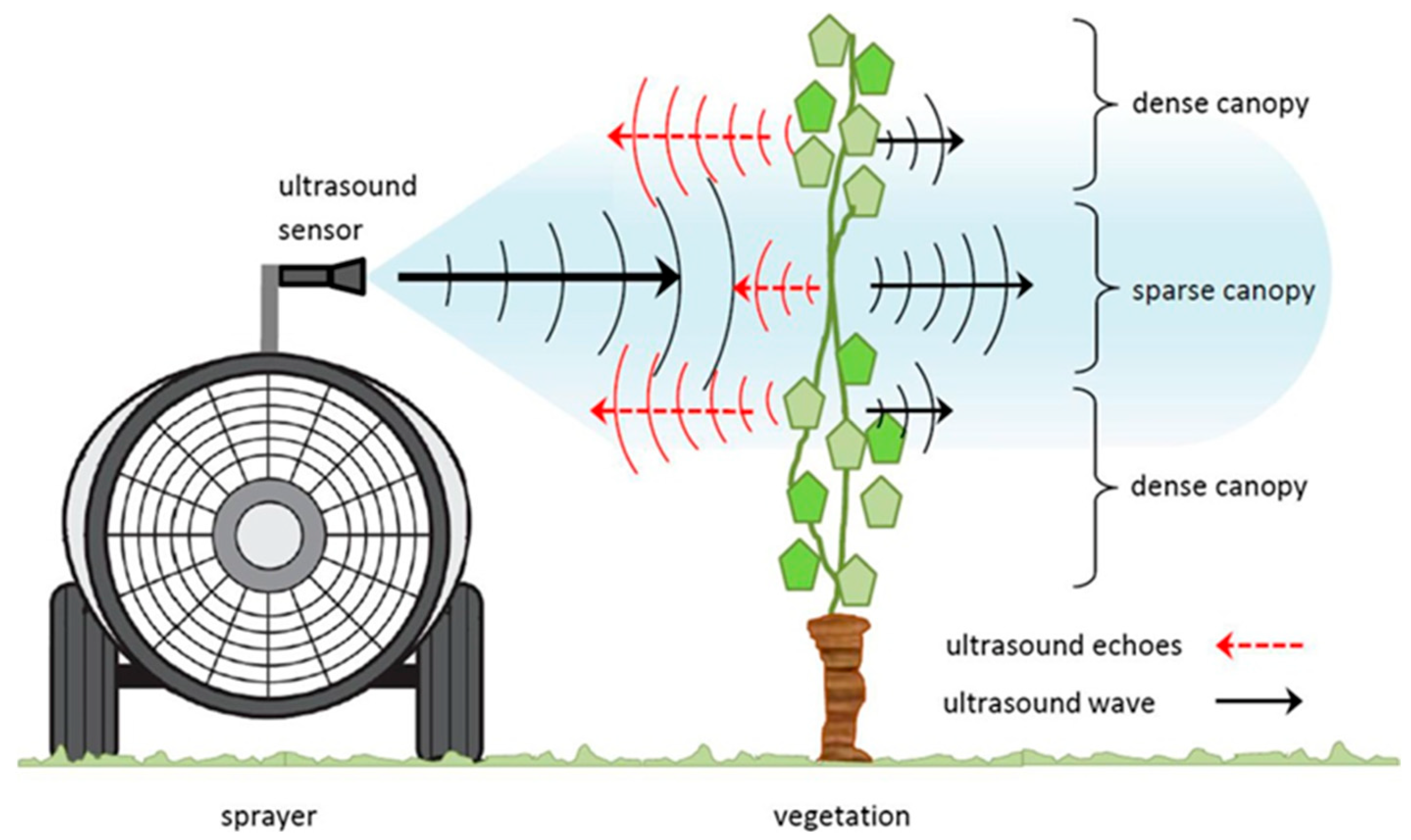
2.1.1. Ultrasonic Sensor
2.1.2. LiDAR
2.2. Detection of Plant Diseases and Pests and Their Severity
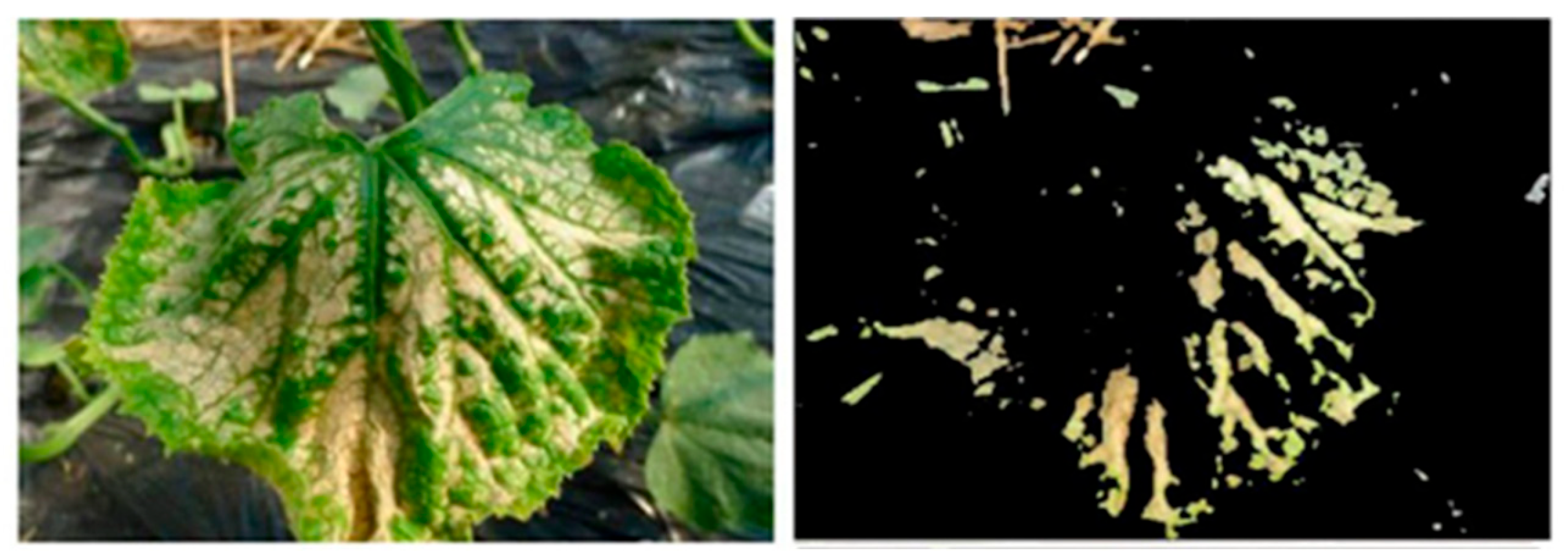
2.2.1. Machine Vision
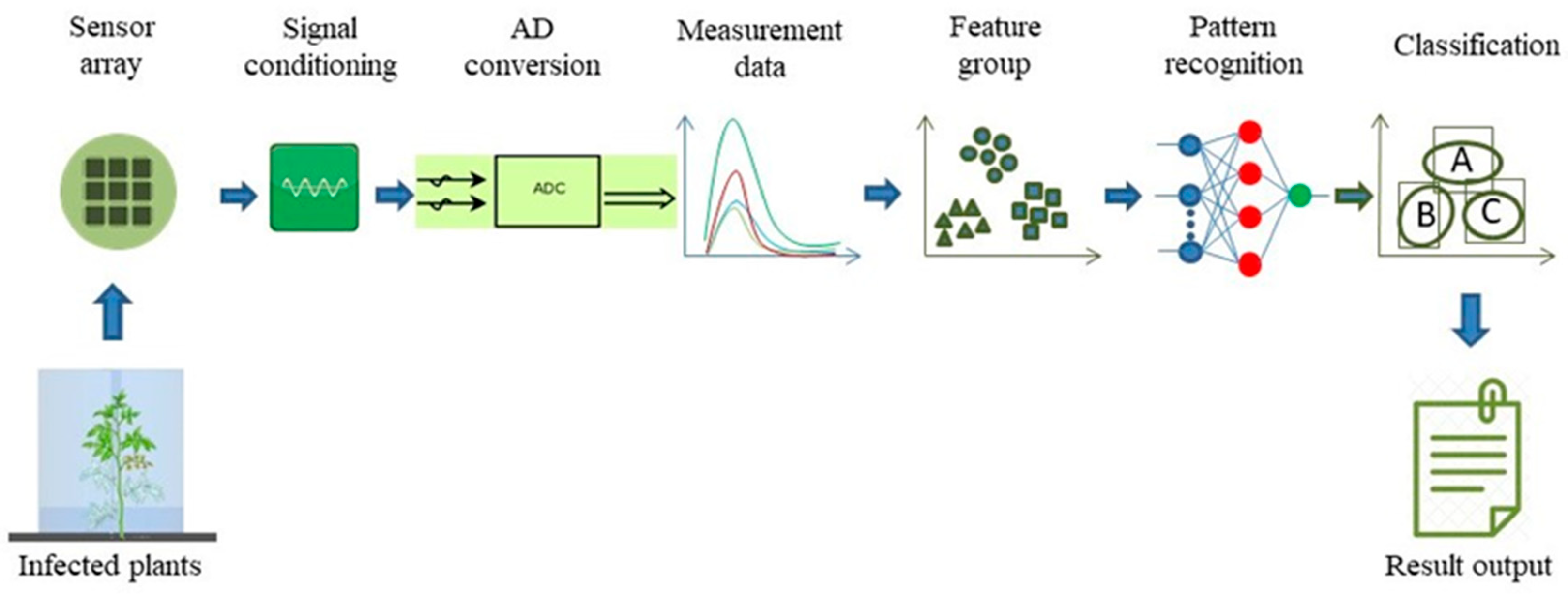
2.2.2. E-Nose
2.3. Detection of Meteorological Conditions
3. Variable Control Unit
3.1. Variable Flow Rate Control Unit
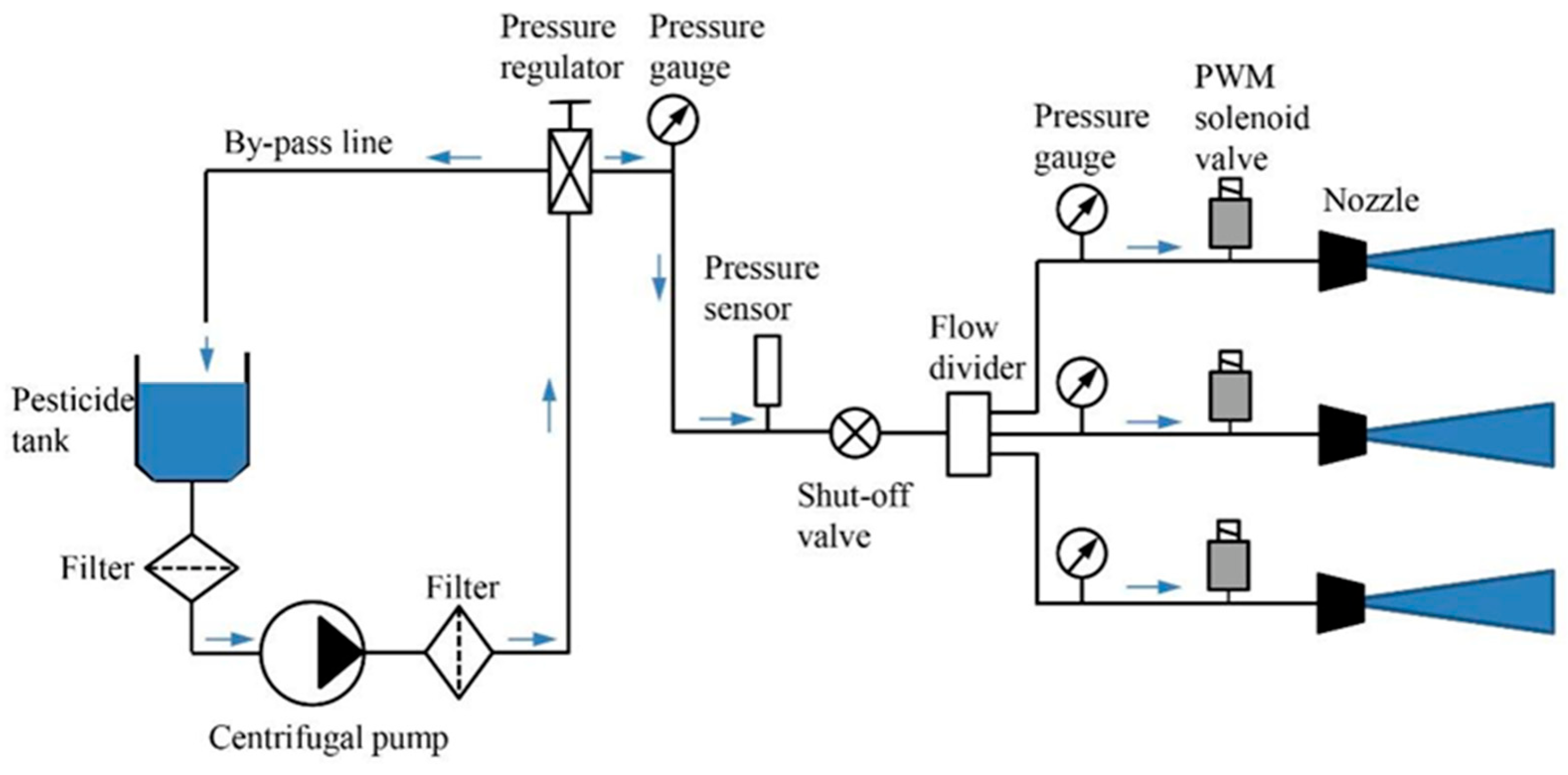
3.1.1. Pressure-Based Flow Rate Control Unit
3.1.2. PWM-Based Flow Rate Control Unit
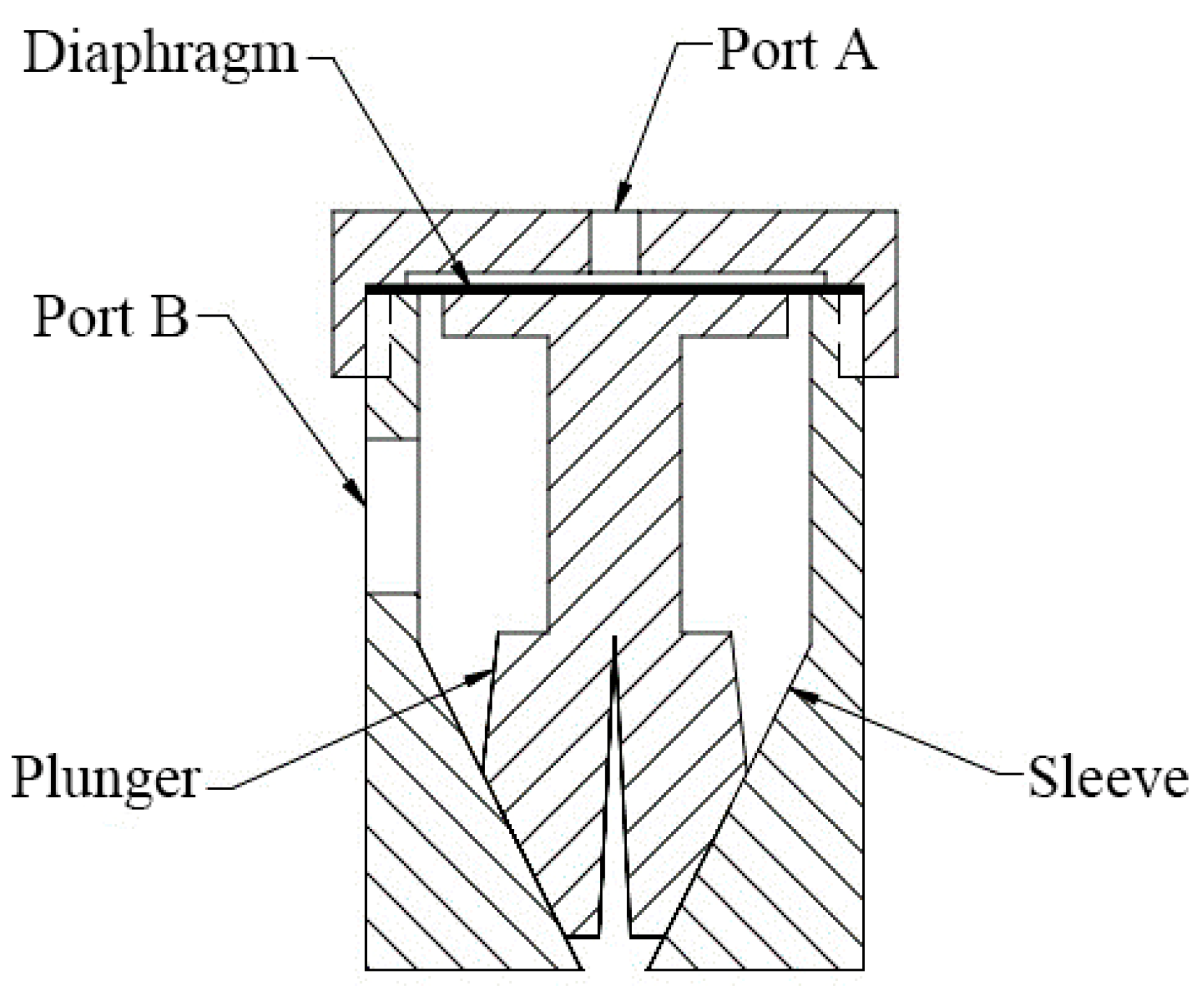
3.1.3. Changing a Nozzle Orifice
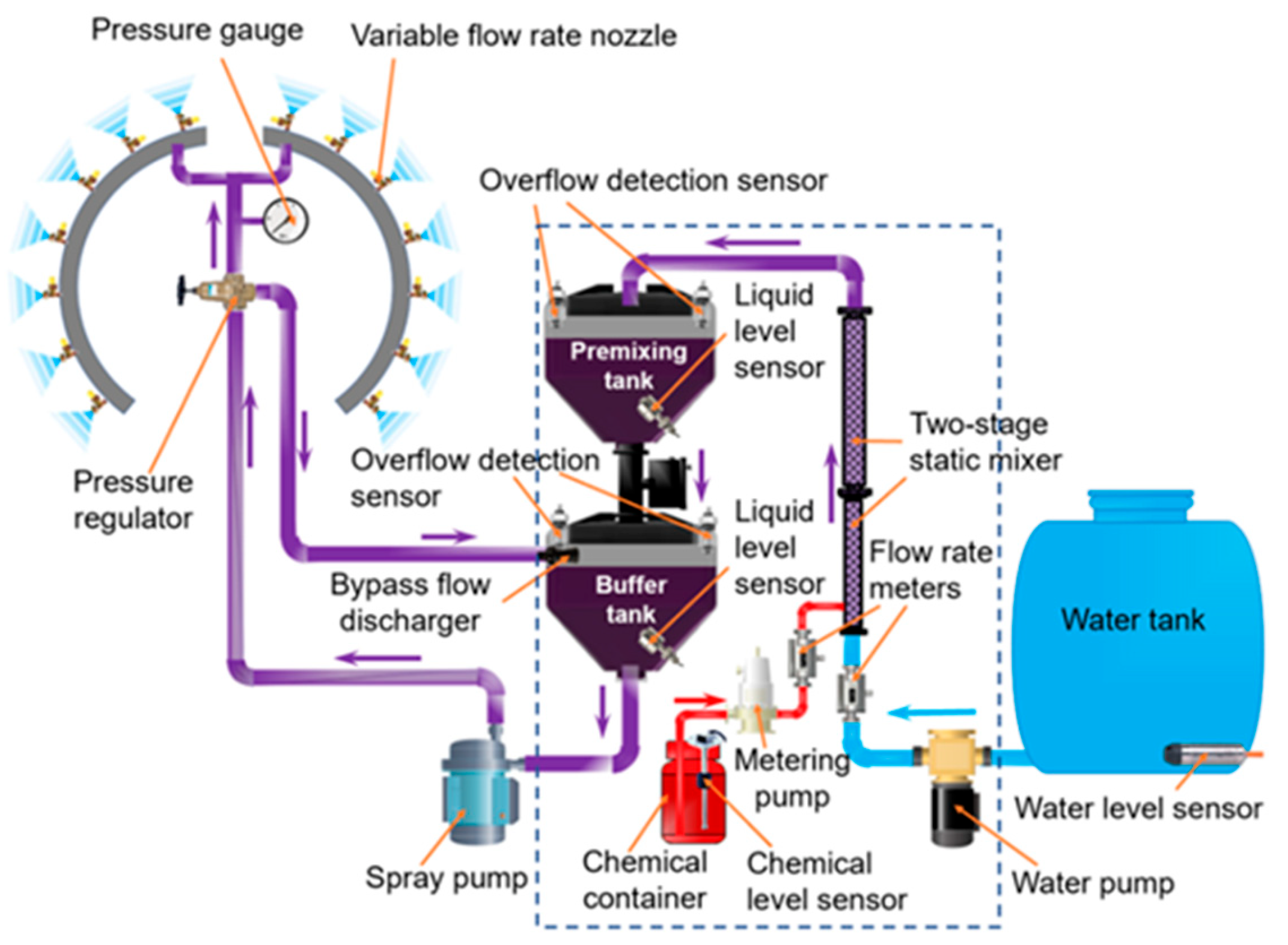
3.2. Variable Concentration Control Unit
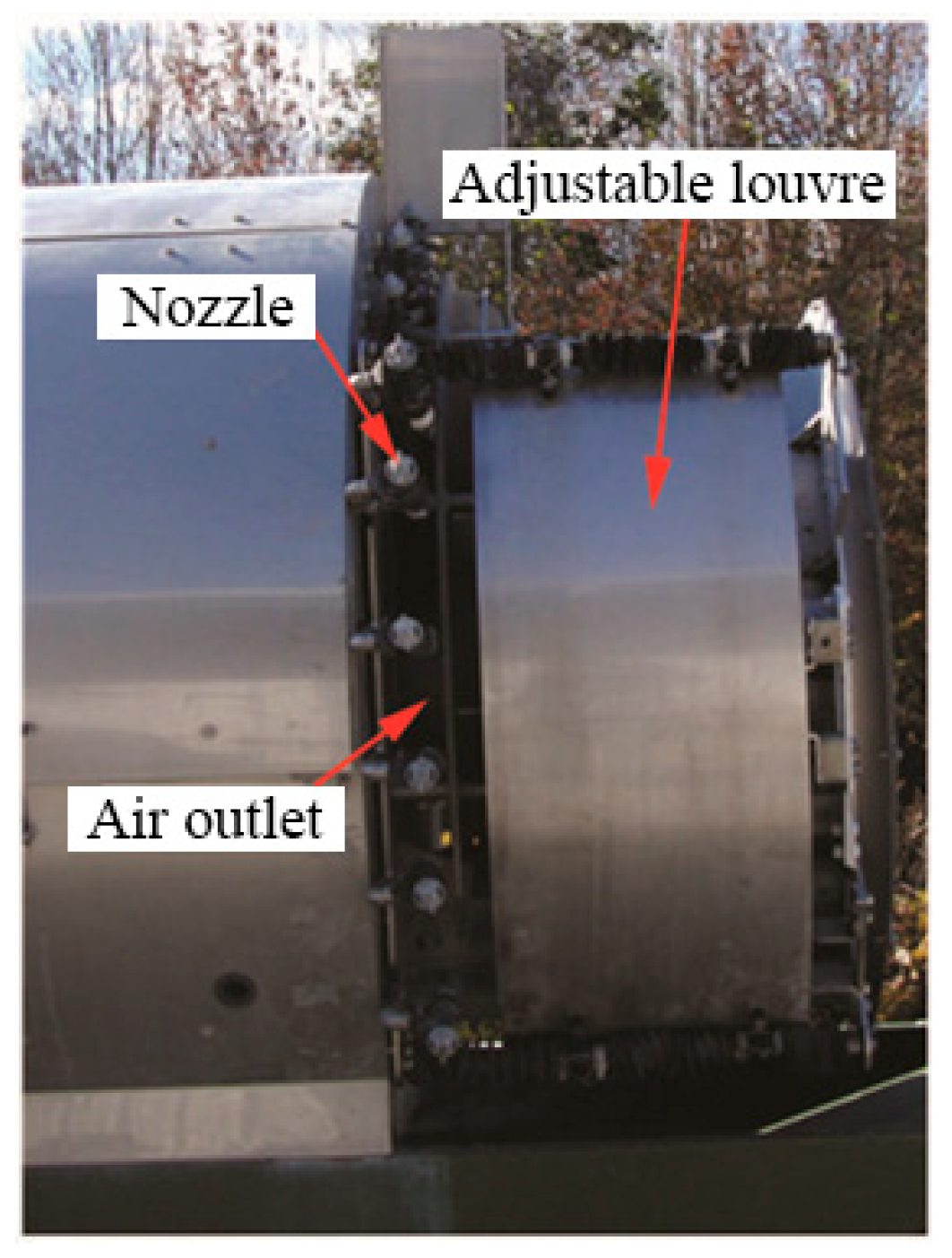
3.3. Variable Air Supply Control Unit
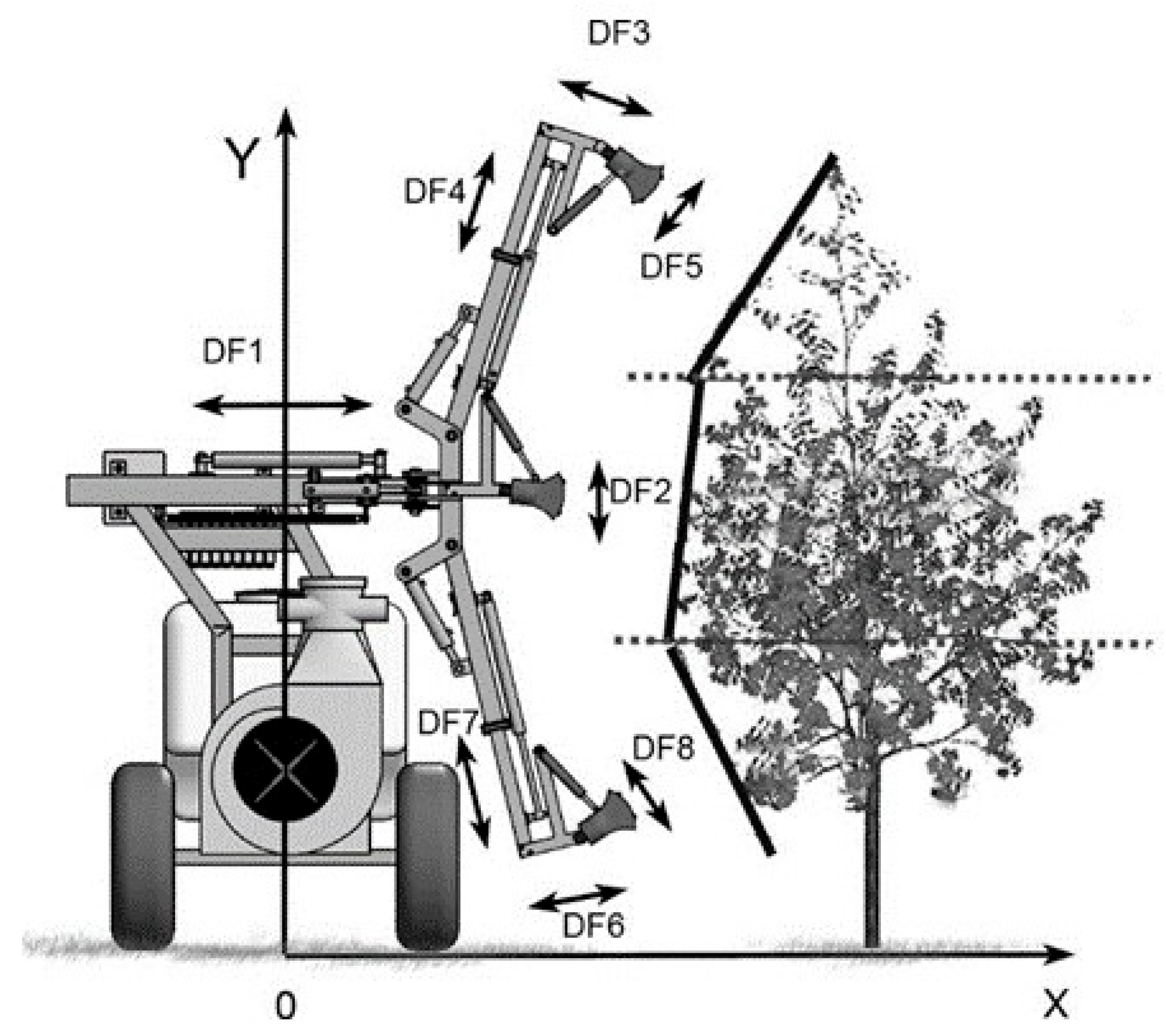
3.4. Variable Nozzle Position and Type
4. Signal-Processing Algorithm
4.1. Key Points in Establishing an Algorithm
4.2. Application Dosage Models
4.3. Application Mode
5. Research Status on an Orchard Variable-Rate Sprayer
6. Further Prospects and Conclusions
6.1. Further Prospects
- (1)
- Accurate real-time detection of canopy density is a future research direction. Although researchers have verified the relationship between the intensity of ultrasonic echo and the foliage density in the laboratory, whether it can be used for online detection still needs in-depth research. Further verification of the internal structure perception and the canopy density estimation method based on laser-scanning sensors are also needed.
- (2)
- Accurate real-time detection of plant diseases and pests and their severity is another research direction. Optimizing the image technology based on machine vision, improving the efficiency of image segmentation and classification algorithms, and realizing the recognition of plant diseases and pests and the real-time variable application of pesticides are future research focuses. In addition, researchers need to pay due attention to deeply studying the electronic nose technology, reducing the cost of an electronic nose, and improving its detection accuracy and efficiency.
- (3)
- Real-time acquisition of meteorological conditions and real-time adjustment of the operating parameters of variable sprayers based on these conditions will be another research direction regarding intelligent sprayers.
- (4)
- It is worth modifying and optimizing the air demand theory, developing the air regulation device with independent control of air speed and air volume, and improving the efficiency of the air regulation device.
- (5)
- In terms of the variable concentration control unit, chemical concentration accuracy and spray mixture uniformity demand further laboratory and field validation.
6.2. Conclusions
- (1)
- In terms of target parameter detection, ultrasonic sensors and laser-scanning sensors are widely used for target position and canopy volume detection. Variable-rate sprayers based on these two sensors have been tested in the laboratory and field and are being commercially applied. The detection of canopy density based on these two sensors has been preliminarily verified in laboratory and field experiments, while the detection of plant diseases and insect pests and their severity based on machine vision and the electronic nose is still in the stage of laboratory research. Besides, the variable-rate sprayer based on meteorological conditions is in the “conception” stage.
- (2)
- Among the three variable flow rate control units, the PWM-based unit is the most widely used one, followed by the pressure-based unit. The variable concentration control unit has been preliminarily verified in the laboratory. The variable air supply control unit has been tested in laboratory and field experiments. However, it is still far from practical application. Among the four methods of changing the air supply, adjusting fan speed and adjusting air outlet area are the most commonly used options.
- (3)
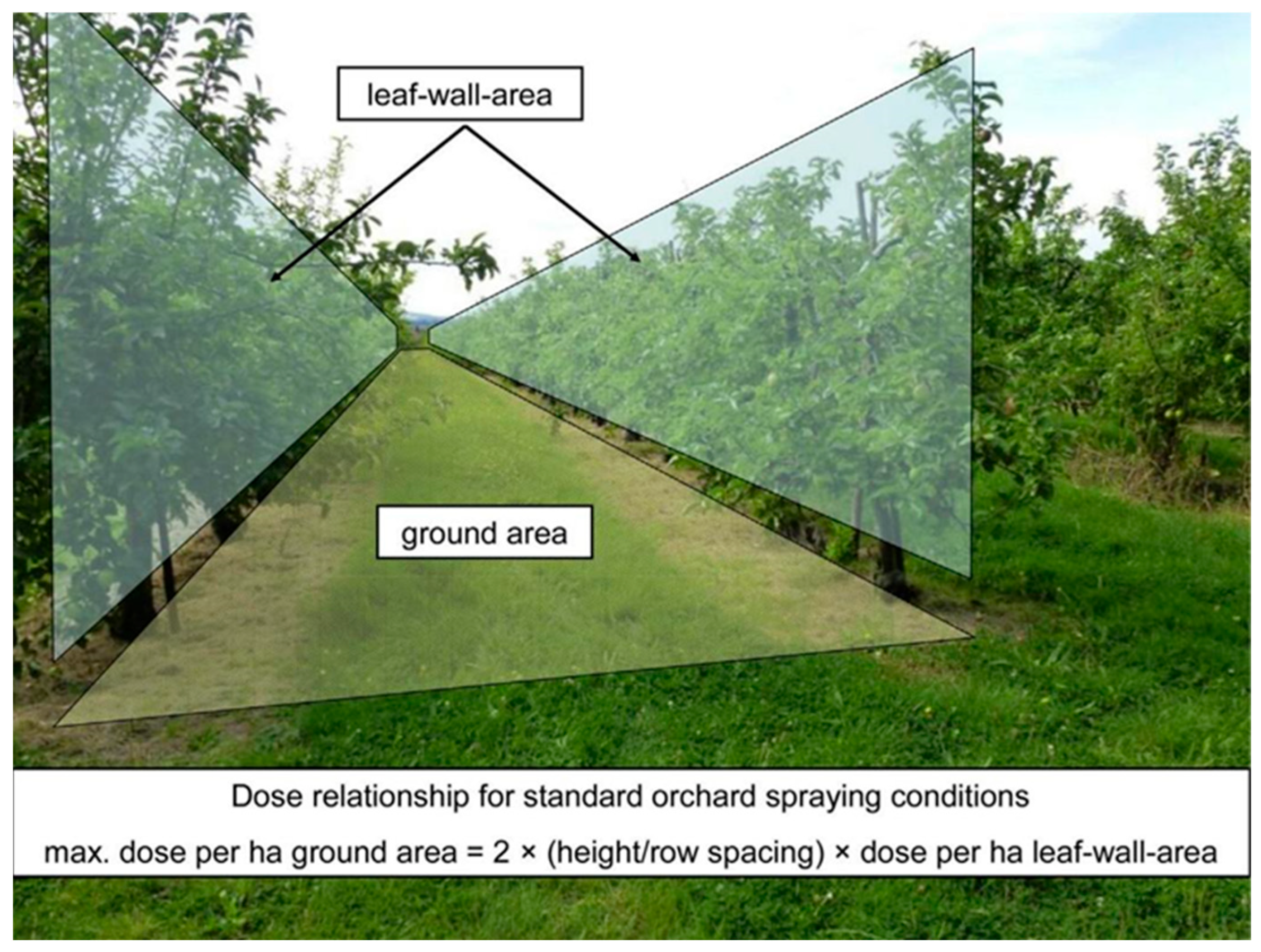
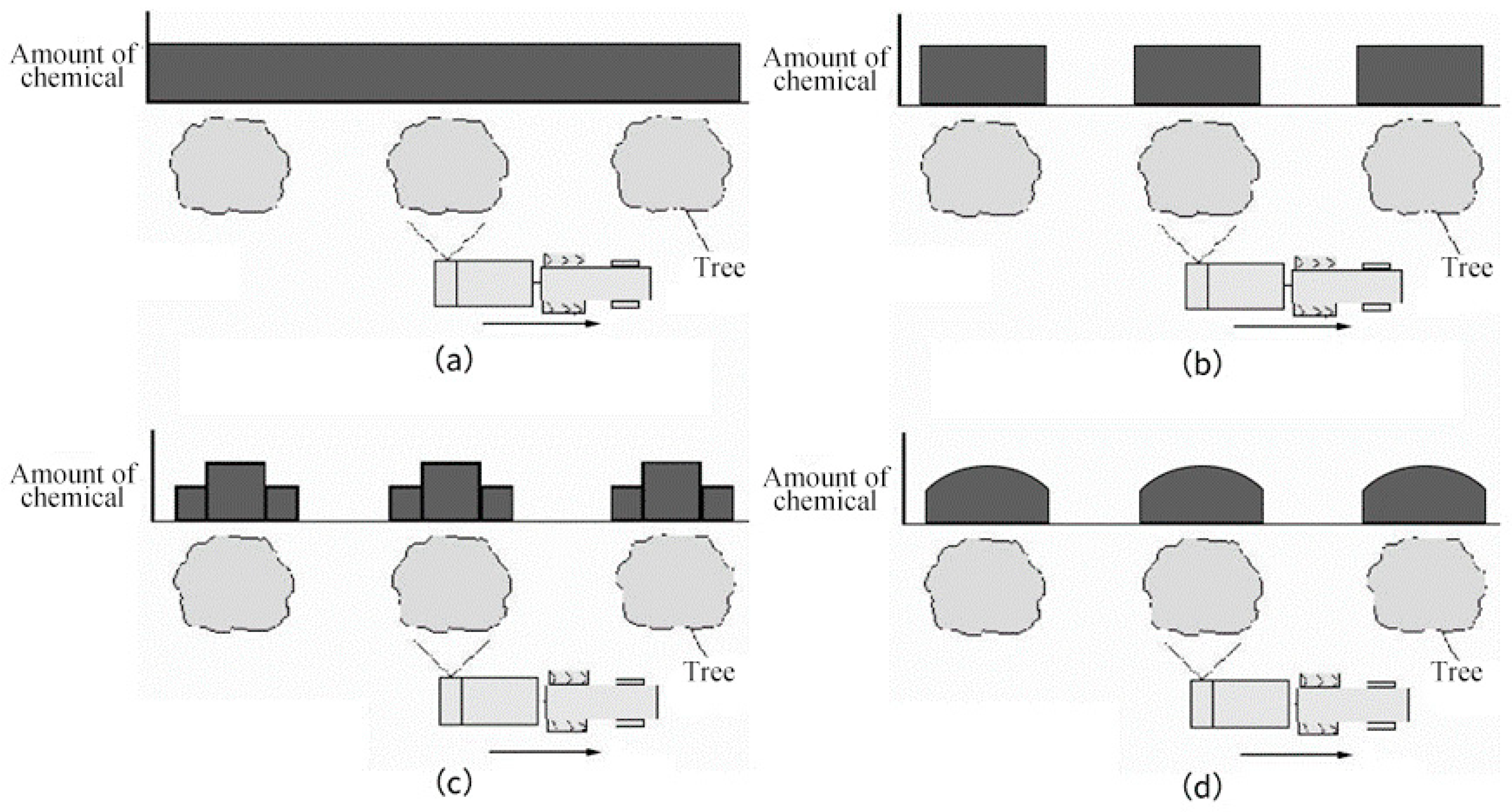
- The TRV and LWA dosage models have been accepted by national regulatory authorities and agrochemical manufacturers, and are widely used. The continuous application mode adjusts the flow rate in a continuous way, which realizes the variable-rate application in a true sense.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shen, Y.; Zhu, H.; Liu, H.; Chen, Y.; Ozkan, E. Development of a laser-guided, embedded-computer-controlled, air-assisted precision sprayer. Trans. ASABE 2017, 60, 1827–1838. [Google Scholar] [CrossRef]
- Colaço, A.F.; Molin, J.P.; Rosell, J.R.; Escolà, A. Spatial variability in commercial orange grove. Part 1: Canopy volume and height. Precis. Agric. 2019, 20, 788–804. [Google Scholar] [CrossRef]
- Colaço, A.F.; Molin, J.P.; Rosell, J.R.; Escolà, A. Spatial variability in commercial orange grove. Part 2: Relating canopy geometry to soil attributes and historical yield. Precis. Agric. 2019, 20, 805–822. [Google Scholar] [CrossRef]
- Owen-Smith, P.; Perry, R.; Wise, J.; Jamil, R.Z.R.; Gut, L.; Sundin, G.; Grieshop, M. Spray coverage and pest management efficacy of a solid set canopy delivery system in high density apples. Pest Manag. Sci. 2019, 75, 3050–3059. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Derksen, R.C.; Guler, H.; Krause, C.R.; Ozkan, H.E. Foliar deposition and off-target loss with different spray techniques in nursery applications. Trans. ASABE 2006, 49, 325–334. [Google Scholar] [CrossRef]
- Zhu, H.; Zondag, R.H.; Derksen, R.C.; Reding, M.; Krause, C.R. Influence of spray volume on spray deposition and coverage within nursery trees. J. Environ. Hortic. 2008, 26, 51–57. [Google Scholar] [CrossRef]
- Fox, R.D.; Derksen, R.C.; Zhu, H.; Brazee, R.D.; Svensson, S.A. A history of air-blast sprayer development and future prospects. Trans. ASABE 2008, 51, 405–410. [Google Scholar] [CrossRef]
- Gu, J.; Zhu, H.; Ding, W.; Jeon, H.Y. Droplet size distributions of adjuvant-amended sprays from an air-assisted five-port PWM nozzle. At. Sprays 2011, 21, 263–274. [Google Scholar] [CrossRef]
- Zhai, C.; Zhao, C.; Ning, W.; Long, J.; Wang, X.; Weckler, P.; Zhang, H. Research progress on precision control methods of air-assisted spraying in orchards. Trans. Chin. Soc. Agric. Eng. 2018, 34, 1–15. [Google Scholar] [CrossRef]
- Abbas, I.; Liu, J.; Faheem, M.; Noor, R.S.; Shaikh, S.A.; Solangi, K.A.; Raza, S.M. Different real-time sensor technologies for the application of variable-rate spraying in agriculture. Sens. Actuators A Phys. 2020, 316, 112265. [Google Scholar] [CrossRef]
- Gu, C.; Wang, X.; Wang, X.; Yang, F.; Zhai, C. Research progress on variable-rate spraying technology in orchards. Appl. Eng. Agric. 2020, 36, 927–942. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef]
- Petrović, D.; Jurišić, M.; Tadić, V.; Plaščak, I.; Barač, Ž. Different sensor systems for the application of variable rate technology in permanent crops. Teh. Glas. 2018, 12, 188–195. [Google Scholar] [CrossRef]
- Gil, E.; Escolà, A.; Rosell, J.R.; Planas, S.; Val, L. Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Prot. 2007, 26, 1287–1297. [Google Scholar] [CrossRef]
- Balsari, P.; Doruchowski, G.; Marucco, P.; Tamagnone, M.; Van de Zande, J.; Wenneker, M. A system for adjusting the spray application to the target characteristics. Agric. Eng. Int. CIGR J. 2008. [Google Scholar]
- Palleja, T.; Landers, A.J. Real time canopy density estimation using ultrasonic envelope signals in the orchard and vineyard. Comput. Electron. Agric. 2015, 115, 108–117. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Lai, Q.; Zhang, Z. Review of variable-rate sprayer applications based on real-time sensor technologies. In Automation in Agriculture: Securing Food Supplies for Future Generations; InTech Publishing: London, UK, 2018; pp. 53–79. [Google Scholar]
- Dou, H.; Zhai, C.; Chen, L.; Wang, X.; Zou, W. Comparison of orchard target-oriented spraying systems using photoelectric or ultrasonic sensors. Agriculture 2021, 11, 753. [Google Scholar] [CrossRef]
- Maldaner, L.F.; Molin, J.P.; Canata, T.F.; Martello, M. A system for plant detection using sensor fusion approach based on machine learning model. Comput. Electron. Agric. 2021, 189, 106382. [Google Scholar] [CrossRef]
- Zhou, H.; Jia, W.; Li, Y.; Ou, M. Method for estimating canopy thickness using ultrasonic sensor technology. Agriculture 2021, 11, 1011. [Google Scholar] [CrossRef]
- Tumbo, S.D.; Salyani, M.; Whitney, J.D.; Wheaton, T.A.; Miller, W.M. Investigation of laser and ultrasonic ranging sensors for measurements of citrus canopy volume. Appl. Eng. Agric. 2002, 18, 367–372. [Google Scholar] [CrossRef]
- Colaço, A.F.; Molin, J.P.; Rosell, J.R.; Escolà, A. Application of light detection and ranging and ultrasonic sensors to high-throughput phenotyping and precision horticulture: Current status and challenges. Hortic. Res. 2018, 5, 35. [Google Scholar] [CrossRef] [PubMed]
- Palleja, T.; Landers, A.J. Real time canopy density validation using ultrasonic envelope signals and point quadrat analysis. Comput. Electron. Agric. 2017, 134, 43–50. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, H.; Ozkan, H.E. Development of a variable-rate sprayer with laser scanning sensor to synchronize spray outputs to tree structures. Trans. ASABE 2012, 55, 773–781. [Google Scholar] [CrossRef]
- Petrović, D.; Banaj, D.; Banaj, A.; Barač, Ž.; Vidaković, I.; Tadić, V. The impact of conventional and sensor spraying on drift and deposit in cherry orchard. Teh. Vjesn. 2019, 26, 1211–1217. [Google Scholar] [CrossRef]
- Zaman, Q.U.; Salyani, M. Effects of foliage density and ground speed on ultrasonic measurement of citrus tree volume. Appl. Eng. Agric. 2004, 20, 173–178. [Google Scholar] [CrossRef]
- Palleja, T.; Tresanchez, M.; Teixido, M.; Sanz, R.; Rosell, J.R.; Palacin, J. Sensitivity of tree volume measurement to trajectory errors from a terrestrial LIDAR scanner. Agric. For. Meteorol. 2010, 150, 1420–1427. [Google Scholar] [CrossRef]
- Jeon, H.Y.; Zhu, H.; Derksen, R.; Ozkan, E.; Krause, C. Evaluation of ultrasonic sensor for variable-rate spray applications. Comput. Electron. Agric. 2011, 75, 213–221. [Google Scholar] [CrossRef]
- Cheraiet, A.; Naud, O.; Carra, M.; Codis, S.; Lebeau, F.; Taylor, J. An algorithm to automate the filtering and classifying of 2D LiDAR data for site-specific estimations of canopy height and width in vineyards. Biosyst. Eng. 2020, 200, 450–465. [Google Scholar] [CrossRef]
- Wei, J.; Salyani, M. Development of a laser scanner for measuring tree canopy characteristics: Phase 1. Prototype development. Trans. ASAE 2004, 47, 2101–2107. [Google Scholar] [CrossRef]
- Wei, J.; Salyani, M. Development of a laser scanner for measuring tree canopy characteristics: Phase 2. Foliage density measurement. Trans. ASAE 2005, 48, 1595–1601. [Google Scholar] [CrossRef]
- Palacin, J.; Palleja, T.; Tresanchez, M.; Sanz, R.; Llorens, J.; Ribes-Dasi, M.; Masip, J.; Arno, J.; Escola, A.; Rosell, J.R. Real-time tree-foliage surface estimation using a ground laser scanner. IEEE Trans. Instrum. Meas. 2007, 56, 1377–1383. [Google Scholar] [CrossRef]
- Sanz-Cortiella, R.; Llorens-Calveras, J.; Rosell, J.R.; Gregorio-Lopez, E.; Palacin-Roca, J. Characterisation of the LMS200 laser beam under the influence of blockage surfaces: Influence on 3D scanning of tree orchards. Sensors 2011, 11, 2751–2772. [Google Scholar] [CrossRef]
- Bietresato, M.; Carabin, G.; Vidoni, R.; Gasparetto, A.; Mazzetto, F. Evaluation of a LiDAR-based 3D-stereoscopic vision system for crop-monitoring applications. Comput. Electron. Agric. 2016, 124, 1–13. [Google Scholar] [CrossRef]
- Wangler, R.J.; Fowler, K.L.; McConnell, R.E., II. Object sensor and method for use in controlling an agricultural sprayer. U.S. Patent No. 5278423, 11 January 1994. [Google Scholar]
- Rosell, J.R.; Sanz, R.; Llorens, J.; Arnó, J.; Escolà, A.; Ribes-Dasi, M.; Masip, J.; Camp, F.; Gràcia, F.; Solanelles, F.; et al. A tractor-mounted scanning LIDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements. Biosyst. Eng. 2009, 102, 128–134. [Google Scholar] [CrossRef]
- Rosell, J.R.; Llorens, J.; Sanz, R.; Arnó, J.; Ribes-Dasi, M.; Masip, J.; Escolà, A.; Camp, F.; Solanelles, F.; Gràcia, F.; et al. Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning. Agric. For. Meteorol. 2009, 149, 1505–1515. [Google Scholar] [CrossRef]
- Cai, J.; Wang, X.; Gao, Y.; Yang, S.; Zhao, C. Design and performance evaluation of a variable-rate orchard sprayer based on a laser-scanning sensor. Int. J. Agric. Biol. Eng. 2019, 12, 51–57. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, H.; Shen, Y.; Chen, Y.; Ozkan, H.E. Evaluation of a laser scanning sensor for variable-rate tree sprayer development. In Proceedings of the 2013 ASABE Annual International Meeting, Kansas, MO, USA, 21–24 July 2013. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, H. Evaluation of a laser scanning sensor in detection of complex-shaped targets for variable-rate sprayer development. Trans. ASABE 2016, 59, 1181–1192. [Google Scholar] [CrossRef]
- Zhang, M.; Lv, X.; Chang, Y.; Qiu, W. Research progress analysis of target precision detection system for orchards. J. Chin. Agric. Mech. 2016, 37, 227–233. [Google Scholar] [CrossRef]
- Qiao, B.; He, X.; Wang, Z.; Han, L.; Liu, W.; Dong, X.; Liang, W. Development of variable-rate spraying system for high clearance wide boom sprayer based on LiDAR scanning. Trans. Chin. Soc. Agric. Eng. 2020, 36, 89–95. [Google Scholar] [CrossRef]
- Clark, M.F.; Adams, A.N. Characteristics of the microplate method of enzyme-linked immunosorbent assay for the detection of plant viruses. J. Gen. Virol. 1977, 34, 475–483. [Google Scholar] [CrossRef]
- Nishi, K.; Isobe, S.-I.; Zhu, Y.; Kiyama, R. Fluorescence-based bioassays for the detection and evaluation of food materials. Sensors 2015, 15, 25831–25867. [Google Scholar] [CrossRef] [PubMed]
- Cui, S.; Ling, P.; Zhu, H.; Keener, H.M. Plant pest detection using an artificial nose system: A review. Sensors 2018, 18, 378–395. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Wang, X. Plant diseases and pests detection based on deep learning: A review. Plant Methods 2021, 17, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Singh, V.; Misra, A.K. Detection of plant leaf diseases using image segmentation and soft computing techniques. Info. Proc. Agric. 2017, 4, 41–49. [Google Scholar] [CrossRef]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Zhang, L.; Wen, S.; Zhang, H.; Zhang, Y.; Deng, Y. Detection of helminthosporium leaf blotch disease based on UAV imagery. Appl. Sci. 2019, 9, 558. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Zhang, D.; Nanehkaran, Y.A.; Sun, Y. A cognitive vision method for the detection of plant disease images. Mach. Vis. Appl. 2021, 32, 1–18. [Google Scholar] [CrossRef]
- Soh, A.C.; Radzi, N.F.M.; Yusof, U.K.M.; Ishak, A.J.; Hassan, M.K. Development of electronic nose for classification of aromatic herbs using artificial intelligent techniques. J. Eng. Sci. Technol. 2018, 13, 3043–3057. [Google Scholar]
- Sun, Y.; Wang, J.; Cheng, S. Early diagnosis of Botrytis cinerea infestation of tomato plant by electronic nose. Appl. Eng. Agric. 2018, 34, 667–674. [Google Scholar] [CrossRef]
- Oates, M.J.; Abu-Khalaf, N.; Molina-Cabrera, C.; Ruiz-Canales, A.; Ramos, J.; Bahder, B.W. Detection of lethal bronzing disease in cabbage palms (Sabal palmetto) using a low-cost electronic nose. Biosensors 2020, 10, 188. [Google Scholar] [CrossRef]
- Şennik, E.; Erden, F.; Constantino, N.; Oh, Y.; Dean, R.A.; Oralkan, Ö. Electronic nose system based on a functionalized capacitive micromachined ultrasonic transducer (CMUT) array for selective detection of plant volatiles. Sens. Actuators B Chem. 2021, 341, 130001. [Google Scholar] [CrossRef]
- Cellini, A.; Blasioli, S.; Biondi, E.; Bertaccini, A.; Braschi, I.; Spinelli, F. Potential applications and limitations of electronic nose devices for plant disease diagnosis. Sensors 2017, 17, 2596. [Google Scholar] [CrossRef]
- Tadić, V.; Marković, M.; Plaščak, I.; Stošić, M.; Lukinac-Čačić, J.; Vujčić, B. Impact of technical spraying factors on leaf area coverage in an apple orchard. Teh. Vjesn. 2014, 21, 1117–1124. [Google Scholar]
- Nuyttens, D.; De Schampheleire, M.; Steurbaut, W.; Baetens, K.; Verboven, P.; Nicolai, B.; Ramon, H.; Sonck, B. Experimental study of factors influencing the risk of drift from field sprayers, Part 1: Meteorological conditions. Asp. Appl. Biol. 2006, 77, 331–339. [Google Scholar]
- Arvidsson, T.; Bergström, L.; Kreuger, J. Spray drift as influenced by meteorological and technical factors. Pest Manag. Sci. 2011, 67, 586–598. [Google Scholar] [CrossRef]
- Bahrouni, H.; Chaabane, H.; Marzougui, N.; Meriem, S.B.; Houcine, B.; Abdallah, M.A.B. Effect of sprayer parameters and wind speed on spray retention and soil deposits of pesticides: Case of artichoke cultivar. Plant Prot. Sci. 2021, 57, 333–343. [Google Scholar] [CrossRef]
- Hołownicki, R.; Doruchowski, G.; Świechowski, W.; Godyń, A.; Konopacki, P.J. Variable air assistance system for orchard sprayers; concept, design and preliminary testing. Biosyst. Eng. 2017, 163, 134–149. [Google Scholar] [CrossRef]
- Giles, D.K.; Comino, J.A. Variable flow control for pressure atomization nozzles. J. Commer. Veh. SAE Trans. 1989, 98, 237–249. [Google Scholar] [CrossRef]
- Giles, D.K. Independent control of liquid flow rate and spray droplet size from hydraulic atomizers. At. Sprays 1997, 7, 161–181. [Google Scholar] [CrossRef]
- Han, S.; Hendrickson, L.L.; Ni, B.; Zhang, Q. Modification and testing of a commercial sprayer with PWM solenoids for precision spraying. Appl. Eng. Agric. 2001, 17, 591–594. [Google Scholar] [CrossRef]
- Gopalapillai, S.; Tian, L.; Zheng, J. Evaluation of a flow control system for site-specific herbicide applications. Trans. ASAE 1999, 42, 863–870. [Google Scholar] [CrossRef]
- Anglund, E.A.; Ayers, P.D. Field evaluation of response times for a variable rate (pressure-based and injection) liquid chemical applicator. Appl. Eng. Agric. 2003, 19, 273–282. [Google Scholar] [CrossRef]
- Qiu, B.; Li, Z.; Wu, H.; Sha, J. Experimental study on variable-rate spraying equipment response capability. Trans. Chin. Soc. Agric. Eng. 2007, 23, 148–152. [Google Scholar]
- King, B.A.; Wall, R.W. Distributed instrumentation for optimum control of variable speed electric pumping plants with center pivots. Appl. Eng. Agric. 2000, 16, 45–50. [Google Scholar] [CrossRef]
- Mangus, D.L.; Sharda, A.; Engelhardt, A.; Flippo, D.; Strasser, R.; Luck, J.D.; Griffin, T. Analyzing the nozzle spray fan pattern of an agricultural sprayer using pulse width modulation technology to generate an on-ground coverage map. Trans. ASABE 2017, 60, 315–325. [Google Scholar] [CrossRef]
- Silva, J.E.; Zhu, H.; da Cunha, J.P.A.R. Spray outputs from a variable-rate sprayer manipulated with PWM solenoid valves. Appl. Eng. Agric. 2018, 34, 527–534. [Google Scholar] [CrossRef]
- Butts, T.R.; Butts, L.E.; Luck, J.D.; Fritz, B.K.; Hoffmann, W.C.; Kruger, G.R. Droplet size and nozzle tip pressure from a pulse-width modulation sprayer. Biosyst. Eng. 2019, 178, 52–69. [Google Scholar] [CrossRef]
- Grella, M.; Gioelli, F.; Marucco, P.; Zwertvaegher, I.; Mozzanini, E.; Mylonas, N.; Nuyttens, D.; Balsari, P. Field assessment of a pulse width modulation (PWM) spray system applying different spray volumes: Duty cycle and forward speed effects on vines spray coverage. Precis. Agric. 2022, 23, 219–252. [Google Scholar] [CrossRef]
- Wei, Z.; Zhu, H.; Zhang, Z.; Salcedo, R.; Duan, D. Droplet size spectrum, activation pressure, and flow rate discharged from PWM flat-fan nozzles. Trans. ASABE 2021, 64, 313–325. [Google Scholar] [CrossRef]
- Fabula, J.; Sharda, A.; Kang, Q.; Flippo, D. Nozzle flow rate, pressure drop, and response time of pulse width modulation (PWM) nozzle control systems. Trans. ASABE 2021, 64, 1519–1532. [Google Scholar] [CrossRef]
- Jiang, H.; Zhang, L.; Liu, G.; Shi, W. Experiment on dynamic spray deposition uniformity for PWM variable spray of single nozzle. Trans. Chin. Soc. Agric. Mach. 2017, 48, 41–46. [Google Scholar] [CrossRef]
- Bui, Q.D. Design and Development of a Variable-Flow Fan Nozzle Using Phase-Partition Air Sampling for Drift Assessment; The University of Tennessee: Knoxville, TN, USA, 1997. [Google Scholar]
- Womac, A.R. Atomization characteristics of high-flow variable-orifice flooding nozzles. Trans. ASAE 2001, 44, 463–471. [Google Scholar] [CrossRef]
- Womac, A.R.; Bui, Q.D. Design and tests of a variable-flow fan nozzle. Trans. ASAE 2002, 45, 287–295. [Google Scholar] [CrossRef]
- Bui, Q.D. VariTarget—A new nozzle with variable flow rate and droplet optimization. In Proceedings of the 2005 ASAE Annual Meeting, Tampa, FL, USA, 17–20 July 2005. [Google Scholar] [CrossRef]
- Luck, J.D.; Pitla, S.K.; Sama, M.P.; Shearer, S.A. Flow, spray pattern, and droplet spectra characteristics of an electronically actuated variable-orifice nozzle. Trans. ASABE 2015, 58, 261–269. [Google Scholar] [CrossRef][Green Version]
- Luck, J.D.; Sama, M.P.; Pitla, S.K.; Shearer, S.A. Pneumatic control of a variable orifice nozzle. In Proceedings of the 2010 ASABE Annual International Meeting, Pittsburgh, PA, USA, 20–23 June 2010. [Google Scholar] [CrossRef]
- Shen, Y.; Zhu, H. Embedded computer-controlled premixing inline injection system for air-assisted variable-rate sprayers. Trans. ASABE 2015, 58, 39–46. [Google Scholar] [CrossRef]
- Reichard, D.L.; Ladd, T.L. Pesticide injection and transfer system for field sprayers. Trans. ASAE 1983, 26, 683–686. [Google Scholar] [CrossRef]
- Zhu, H.; Fox, R.D.; Ozkan, H.E.; Brazee, R.D.; Derksen, R.C. A system to determine lag time and mixture uniformity for inline injection sprayers. Appl. Eng. Agric. 1998, 14, 103–110. [Google Scholar] [CrossRef]
- Felizardo, K.R.; Mercaldi, H.V.; Cruvinel, P.E.; Oliveira, V.A.; Steward, B.L. Modeling and model validation of a chemical injection sprayer system. Appl. Eng. Agric. 2016, 32, 285–297. [Google Scholar] [CrossRef][Green Version]
- Zhang, Z.; Zhu, H.; Guler, H.; Shen, Y. Improved premixing in-line injection system for variable-rate orchard sprayers with Arduino platform. Comput. Electron. Agric. 2019, 162, 389–396. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, H.; Salcedo, R.; Wei, Z. Assessment of chemical concentration accuracy and mixture uniformity of premixing in-line injection system. Comput. Electron. Agric. 2020, 176, 105670. [Google Scholar] [CrossRef]
- Salcedo, R.; Zhu, H.; Zhang, Z.; Wei, Z.; Chen, L.; Ozkan, E.; Falchieri, D. Foliar deposition and coverage on young apple trees with PWM-controlled spray systems. Comput. Electron. Agric. 2020, 178, 105794. [Google Scholar] [CrossRef]
- Qiu, W.; Zhao, S.; Ding, W.; Sun, C.; Lu, J.; Li, Y.; Gu, J. Effects of fan speed on spray deposition and drift for targeting air-assisted sprayer in pear orchard. Int. J. Agric. Biol. Eng. 2016, 94, 53–62. [Google Scholar] [CrossRef]
- Li, L.; He, X.; Song, J.; Liu, Y.; Wang, Z.; Li, J.; Jia, X.; Liu, Z. Comparative experiment on profile variable rate spray and conventional air assisted spray in orchards. Trans. Chin. Soc. Agric. Eng. 2017, 33, 56–63. [Google Scholar] [CrossRef]
- Khot, L.R.; Ehsani, R.; Albrigo, G.; Landers, A.J.; Larbi, P.A. Spray pattern investigation of an axial-fan airblast precision sprayer using a modified vertical patternator. Appl. Eng. Agric. 2012, 28, 647–654. [Google Scholar] [CrossRef]
- Jiang, H.; Niu, C.; Liu, L.; Wang, D.; Wang, J.; Mao, W. Design and experiment of air volume control system of orchard multi-pipe air sprayer. J. Agric. Mach. 2020, 51, 298–307. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Rodríguez-Lizana, A.; Cuenca, A.; González-Sánchez, E.J.; Blanco-Roldán, G.L.; Gil-Ribes, J.A. Improving plant protection product applications in traditional and intensive olive orchards through the development of new prototype air-assisted sprayers. Crop Prot. 2017, 94, 44–58. [Google Scholar] [CrossRef]
- Vujčić, B.; Tadić, V.; Marković, M.; Lukinac-Čačić, J.; Stošić, M.; Plaščak, I. Impact of technical spraying factors on vertical liquid distribution with Agromehanika AGP 440 axial fan sprayer. Teh. Vjesn. 2015, 22, 367–373. [Google Scholar] [CrossRef]
- Osterman, A.; Godeša, T.; Hočevar, M.; Širok, B.; Stopar, M. Real-time positioning algorithm for variable-geometry air-assisted orchard sprayer. Comput. Electron. Agric. 2013, 98, 175–182. [Google Scholar] [CrossRef]
- Zhou, L.; Fu, X.; Ding, W.; Ding, S.; Chen, J.; Chen, Z. Design and experiment of combined disc air-assisted orchard sprayer. Trans. Chin. Soc. Agric. Eng. 2015, 31, 64–71. [Google Scholar] [CrossRef]
- Zhou, L.; Xue, X.; Zhou, L.; Zhang, L.; Ding, S.; Chang, C.; Zhang, X.; Chen, C. Research situation and progress analysis on orchard variable rate spraying technology. Trans. Chin. Soc. Agric. Eng. 2017, 33, 80–92. [Google Scholar] [CrossRef]
- Rovira-Más, F.; Reid, J.F.; Zhang, Q. Stereovision data processing with 3D density maps for agricultural vehicles. Trans. ASABE 2006, 49, 1213–1222. [Google Scholar] [CrossRef]
- Chueca, P.; Garcerá, C.; Moltó, E.; Gutiérrez, A. Development of a sensor-controlled sprayer for applying low-volume bait treatments. Crop Prot. 2008, 27, 1373–1379. [Google Scholar] [CrossRef]
- Byers, R.E.; Hickey, K.D.; Hill, C.H. Base gallonage per acre. Va. Fruit 1971, 60, 19–23. [Google Scholar]
- Sutton, T.B.; Unrath, C.R. Evaluation of the tree-row-volume model for full-season pesticide application on apples. Plant Dis. 1988, 72, 629–632. [Google Scholar] [CrossRef]
- Furness, G.O.; Magarey, P.A.; Miller, P.H.; Drew, H.J. Fruit tree and vine sprayer calibration based on canopy size and length of row: Unit canopy row method. Crop Prot. 1998, 17, 639–644. [Google Scholar] [CrossRef]
- Garcerá, C.; Fonte, A.; Moltó, E.; Chueca, P. Sustainable use of pesticide applications in citrus: A support tool for volume rate adjustment. Int. J. Environ. Res. Public Health 2017, 14, 715. [Google Scholar] [CrossRef]
- Koch, H. How to achieve conformity with the dose expression and sprayer function in high crops. Pflanzenschutz Nachr. Bayer 2007, 60, 71–84. [Google Scholar]
- EPPO (European Plant Protection Organization). Conclusions and recommendations. Plenary session. In Proceedings of the Workshop on Harmonized Dose Expression for the Zonal Evaluation of Plant Protection Products in High Growing Crops, Vienna, Austria, 18–20 October 2016. [Google Scholar]
- Walklate, P.J.; Cross, J.V. Regulated dose adjustment of commercial orchard spraying products. Crop Prot. 2013, 54, 65–73. [Google Scholar] [CrossRef]
- Gil, E.; Campos, J.; Ortega, P.; Llop, J.; Gras, A.; Armengol, E.; Salcedo, R.; Gallart, M. DOSAVINA: Tool to calculate the optimal volume rate and pesticide amount in vineyard spray applications based on a modified leaf wall area method. Comput. Electron. Agric. 2019, 160, 117–130. [Google Scholar] [CrossRef]
- Frießleben, R.; Rosslenbroich, H.; Elbert, A. Dose expression in plant protection product field testing in high crops: Need for harmonization. Pflanzenschutz Nachr. Bayer 2007, 60, 85–96. [Google Scholar]
- Giles, D.K.; Delwiche, M.J.; Dodd, R.B. Sprayer control by sensing orchard crop characteristics: Orchard architecture and spray liquid savings. J. Agric. Eng. Res. 1989, 43, 271–289. [Google Scholar] [CrossRef]
- Moltó, E.; Martín, B.; Gutiérrez, A. PM-power and machinery: Pesticide loss reduction by automatic adaptation of spraying on globular trees. J. Agric. Eng. Res. 2001, 78, 35–41. [Google Scholar] [CrossRef]
- Solanelles, F.; Escolà, A.; Planas, S.; Rosell, J.R.; Camp, F.; Gràcia, F. An electronic control system for pesticide application proportional to the canopy width of tree crops. Biosyst. Eng. 2006, 95, 473–481. [Google Scholar] [CrossRef]
- Berk, P.; Stajnko, D.; Lakota, M.; Belsak, A. Real time fuzzy logic system for continuous control solenoid valve in the process of applying the plant protection product. Agric. Eng. 2015, 15, 1–9. [Google Scholar]
- Jeon, H.Y.; Zhu, H. Development of a variable-rate sprayer for nursery liner applications. Trans. ASABE 2012, 55, 303–312. [Google Scholar] [CrossRef]
- Maghsoudi, H.; Minaei, S.; Ghobadian, B.; Masoudi, H. Ultrasonic sensing of pistachio canopy for low-volume precision spraying. Comput. Electron. Agric. 2015, 112, 149–160. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, H.; Shen, Y.; Chen, Y.; Ozkan, H.E. Development of digital flow control system for multi-channel variable-rate sprayers. Trans. ASABE 2014, 57, 273–281. [Google Scholar] [CrossRef]
- Zhu, H.; Liu, H.; Shen, Y.; Liu, H.; Zondag, R.H. Spray deposition inside multiple-row nursery trees with a laser-guided sprayer. J. Environ. Hortic. 2017, 35, 13–23. [Google Scholar] [CrossRef]
- Zhu, H.; Rosetta, R.; Reding, M.E.; Zondag, R.H.; Ranger, C.M.; Canas, L.; Fulcher, A.; Derksen, R.C.; Ozkan, H.E.; Krause, C.R. Validation of a laser-guided variable-rate sprayer for managing insects in ornamental nurseries. Trans. ASABE 2017, 60, 337–345. [Google Scholar] [CrossRef]
- Chen, L.; Wallhead, M.; Zhu, H.; Fulcher, A. Control of insects and diseases with intelligent variable-rate sprayers in ornamental nurseries. J. Environ. Hortic. 2019, 37, 90–100. [Google Scholar] [CrossRef]
- Ortega, P.; Salas, B.; Balsari, P.; Polder, G.; Fountas, S.; Nuyttens, D.; Jesus, J.; Balafoutis, T.; Gil, E. H2020—OPTIMA—Optimised Pest Integrated Management to precisely detect and control plant diseases in perennial crops and open-field vegetables. Asp. Appl. Biol. 2020, 144, 221–227. [Google Scholar]
- Gil, E.; Ortega, P.; Salas, B.; Andreu, F.; Berger, L.T.; Fountas, S.; Nuyttens, D. Development of a methodology to select the optimal application technologies in apple crop—EU project OPTIMA H2020. Asp. Appl. Biol. 2020, 144, 67–75. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Measuring Principle | Advantage | Disadvantage |
|---|---|---|---|
| Ultrasonic sensor | Measure the flight time period from the time when an ultrasonic wave is emitted to the time when it hits the target and reflects back to determine the distance from the sensor to the target |
|
|
| LiDAR sensor |
|
|
|
| Target Detection | Sensor | Development Level |
|---|---|---|
| Target position and volume | Ultrasonic sensor; LiDAR sensor | Mature technology and commercialized application |
| Canopy density | Ultrasonic sensor; LiDAR sensor | Preliminarily verified in laboratory and field experiments |
| Plant diseases and pests and their severity | Machine vision; E-nose | In the stage of laboratory research |
| Meteorological conditions | Meteorological sensor | In the “conception” stage |
| Control Method | Adjusting Direction | Air velocity Change | Air Volume Change |
|---|---|---|---|
| adjust fan speed | ↑ 1 | ↑ 1 | ↑ 1 |
| adjust air inlet area | ↑ 1 | ↑ 1 | ↑ 1 |
| adjust air outlet area | ↑ 1 | ↓ 2 | ↑ 1 |
| adjust the distance | ↑ 1 | ↓ 2 | ↓ 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Z.; Xue, X.; Salcedo, R.; Zhang, Z.; Gil, E.; Sun, Y.; Li, Q.; Shen, J.; He, Q.; Dou, Q.; et al. Key Technologies for an Orchard Variable-Rate Sprayer: Current Status and Future Prospects. Agronomy 2023, 13, 59. https://doi.org/10.3390/agronomy13010059
Wei Z, Xue X, Salcedo R, Zhang Z, Gil E, Sun Y, Li Q, Shen J, He Q, Dou Q, et al. Key Technologies for an Orchard Variable-Rate Sprayer: Current Status and Future Prospects. Agronomy. 2023; 13(1):59. https://doi.org/10.3390/agronomy13010059
Chicago/Turabian StyleWei, Zhiming, Xinyu Xue, Ramón Salcedo, Zhihong Zhang, Emilio Gil, Yitian Sun, Qinglong Li, Jingxin Shen, Qinghai He, Qingqing Dou, and et al. 2023. "Key Technologies for an Orchard Variable-Rate Sprayer: Current Status and Future Prospects" Agronomy 13, no. 1: 59. https://doi.org/10.3390/agronomy13010059
APA StyleWei, Z., Xue, X., Salcedo, R., Zhang, Z., Gil, E., Sun, Y., Li, Q., Shen, J., He, Q., Dou, Q., & Zhang, Y. (2023). Key Technologies for an Orchard Variable-Rate Sprayer: Current Status and Future Prospects. Agronomy, 13(1), 59. https://doi.org/10.3390/agronomy13010059