
Bionic Optimization Design and Experiment of Reciprocating Cutting System on Single-Row Tea Harvester


Abstract
:1. Introduction
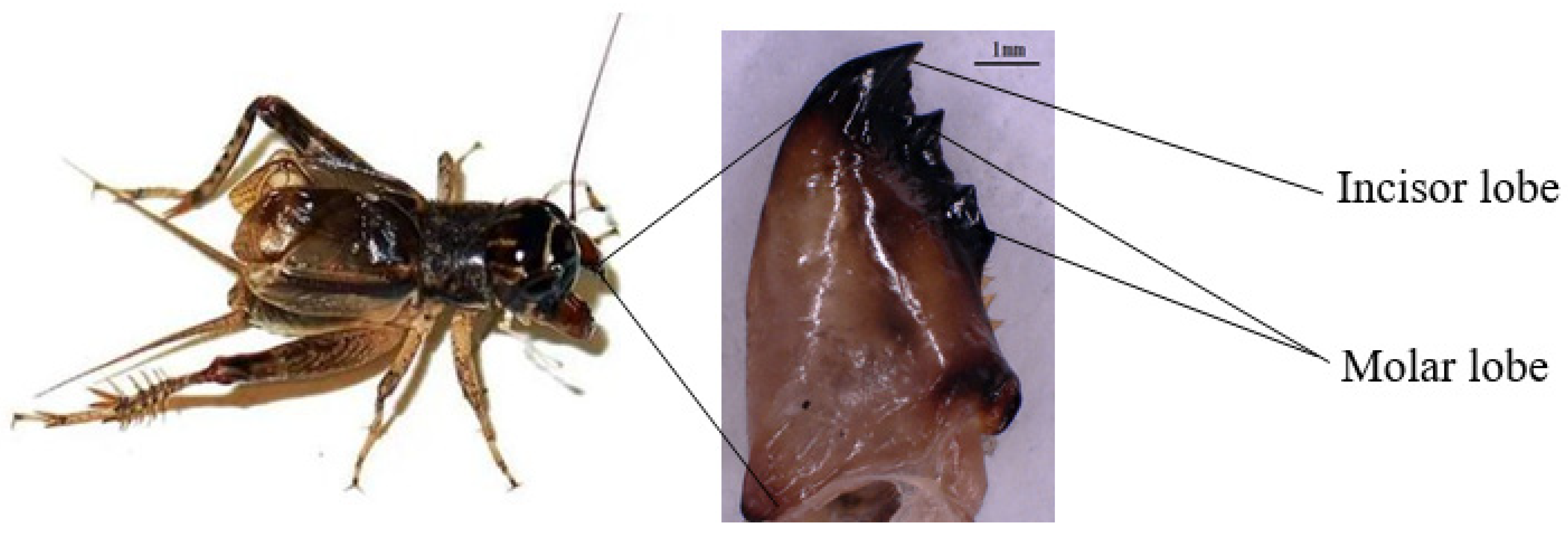
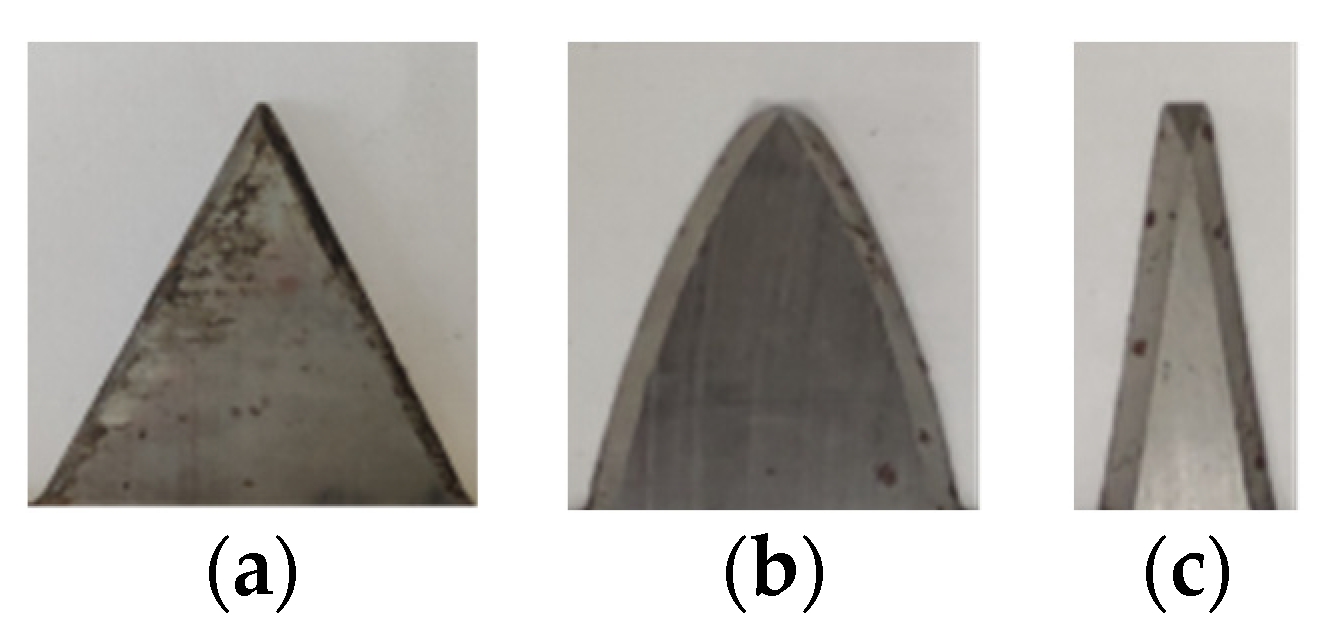
2. Curved Structural Characteristics of Cricket Tooth
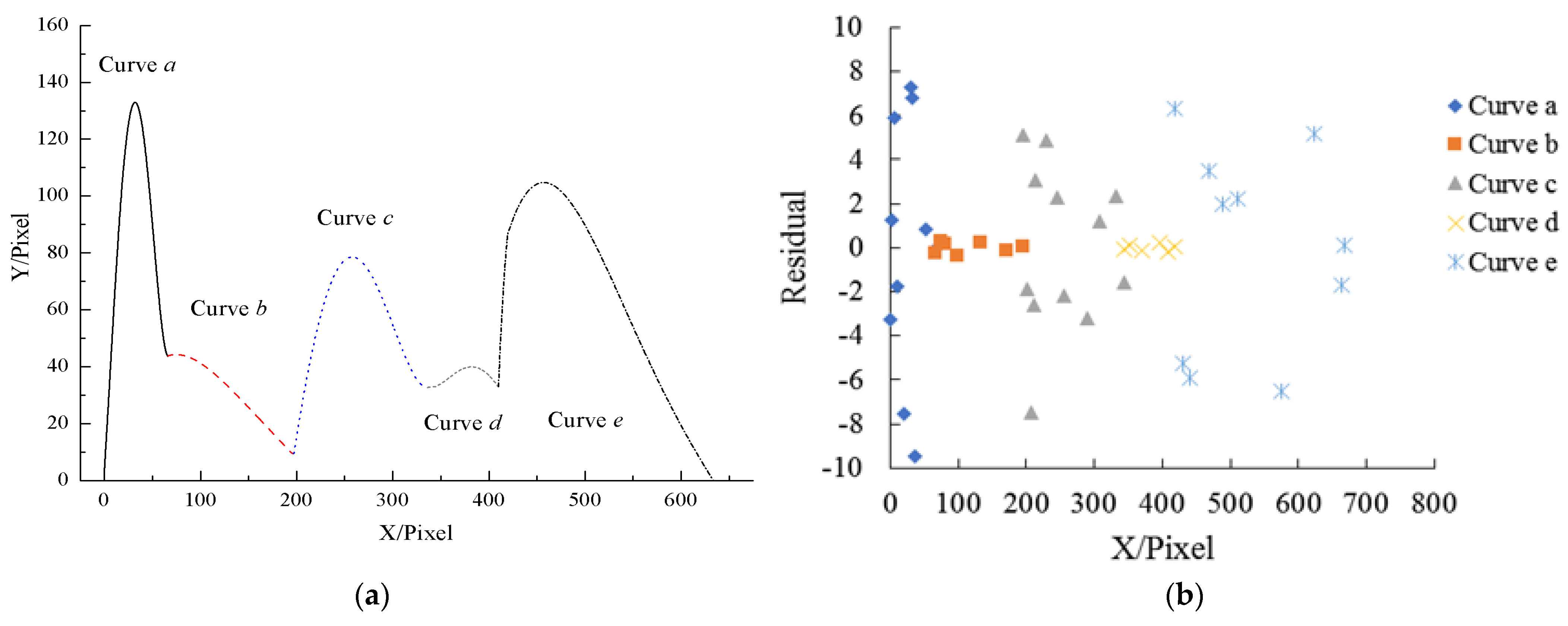
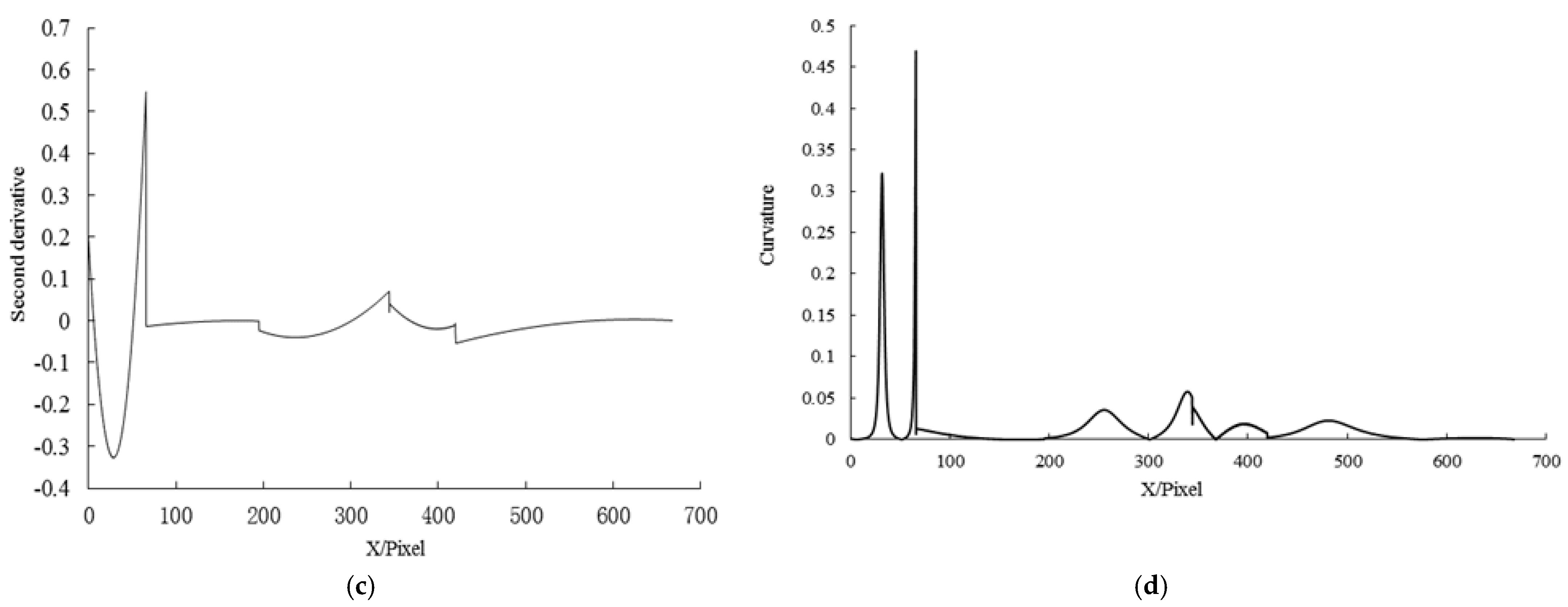
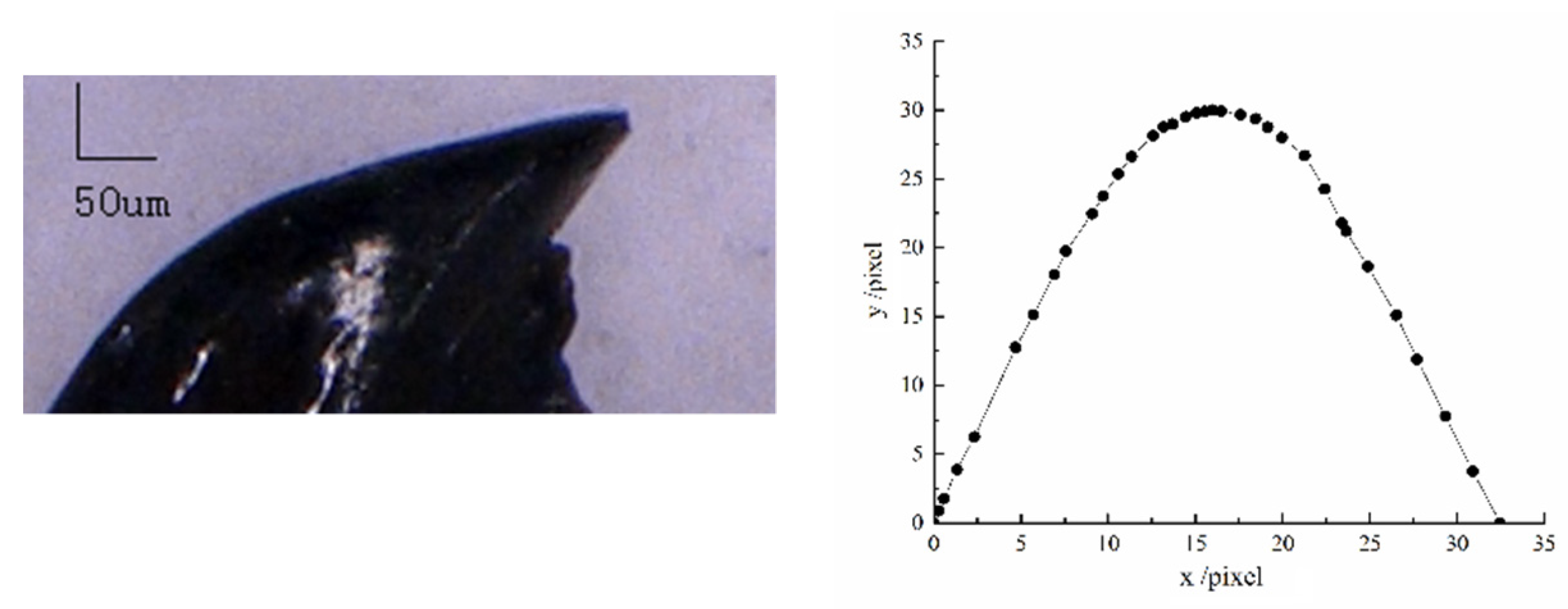
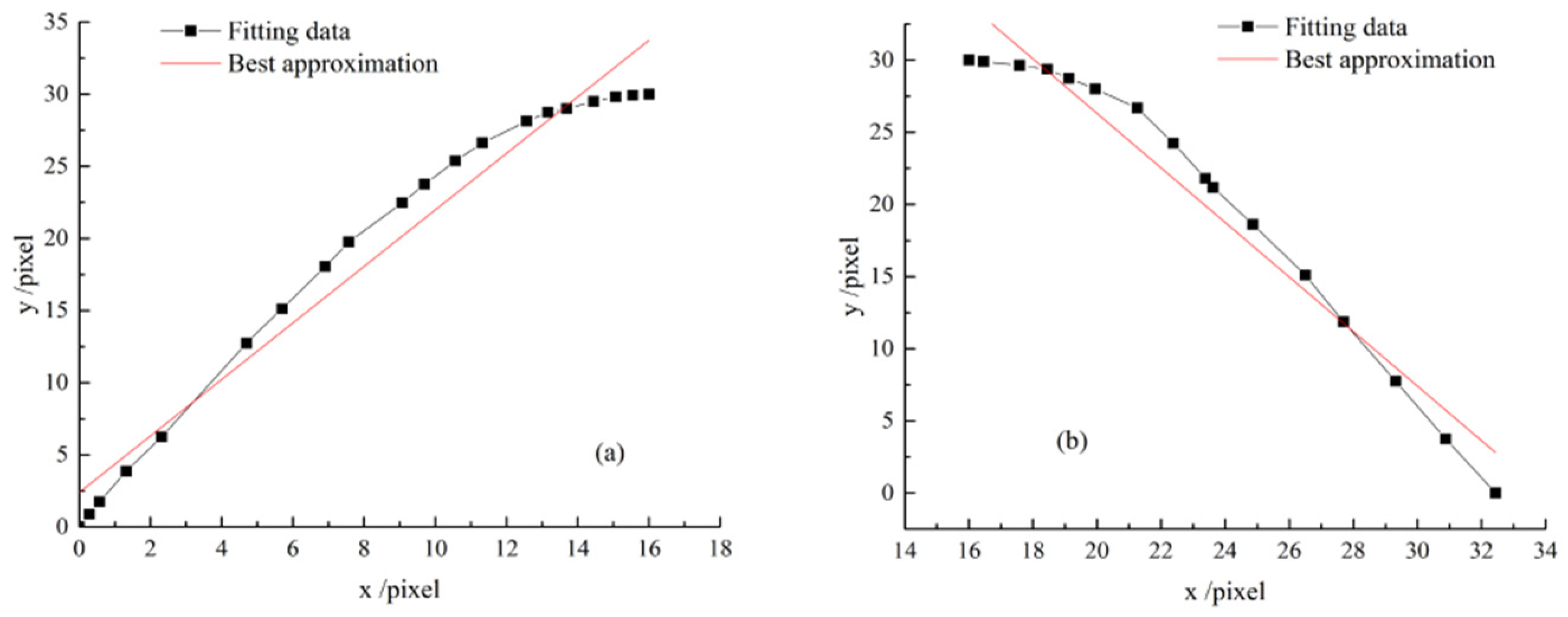
3. Bionic Curve Extraction and Analysis
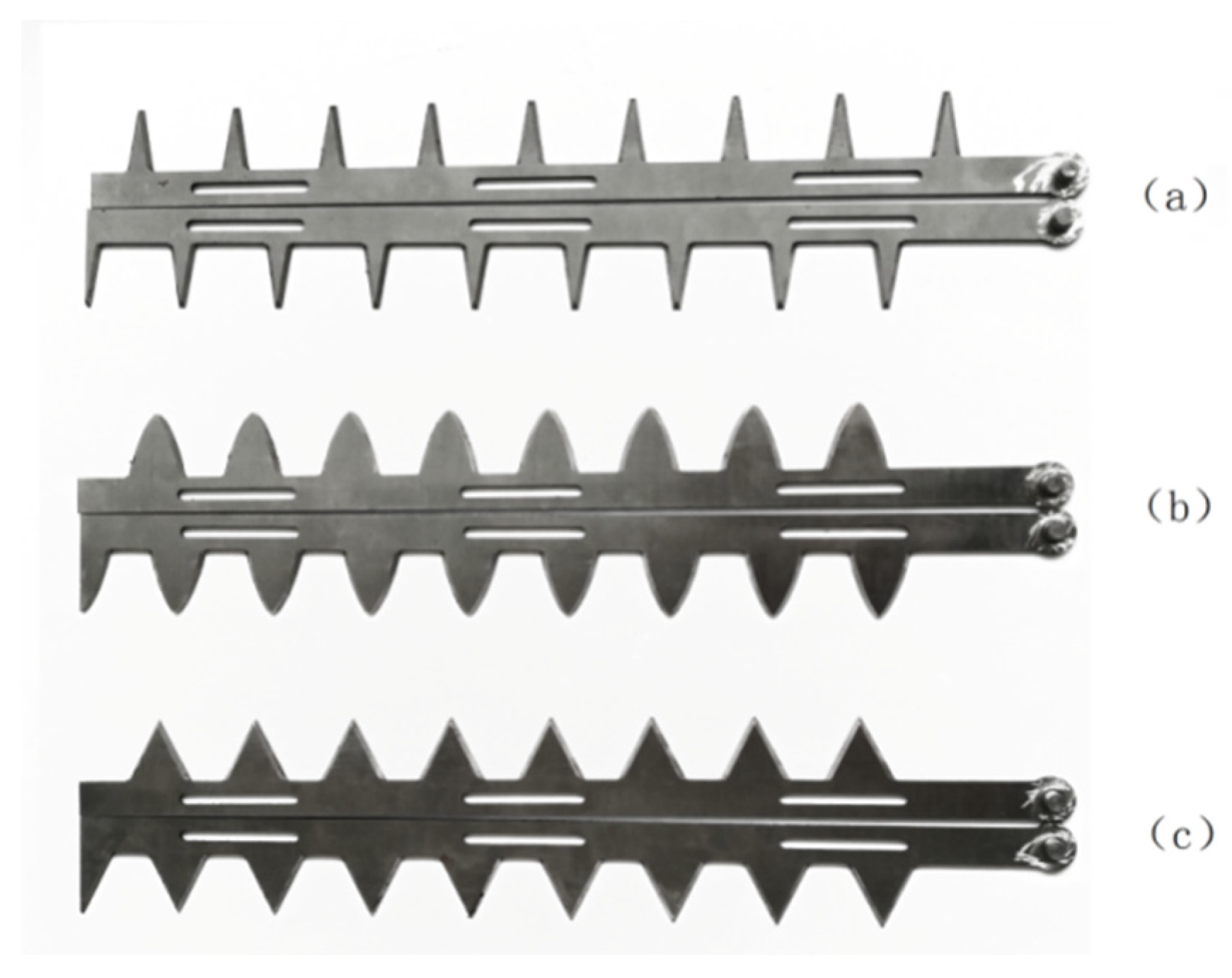
4. Bionic Blade Design
5. Cutting Performance Test of Cutting Blade
5.1. Test Methods
5.2. Test Results and Analysis
5.2.1. Cutting Force Analysis
5.2.2. Cutting Power Consumption Analysis
0.46x12 − 0.3x22 + 0.39x32
6. Field Cutting Experiment
6.1. Experimental Design
6.2. Test Results and Analysis
6.3. Parameter Combination Optimization and Verification
7. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Food and Agriculture Organization of the United Nations, Statistics Division (FAOSTAT). World Tea Production in 2017. Crops/World Regions/Production Quantity from Picklists. 2019. Available online: https://www.fao.org/faostat/zh/#search/tea (accessed on 19 September 2016).
- Manikanta, M.; Niranjan, R.S.; Neha, S.; Yashas, K.B.; Hemalatha, J.N. Implementation of tea harvester. Int. J. Eng. Res. Technol. 2020, 7, 1358–1363. [Google Scholar] [CrossRef]
- Li, J.H. 2019 China tea consumption market report. Tea World 2019, 11, 43–51. [Google Scholar]
- Pang, R.; Zhao, X.J.; Du, J.B.; Tong, J.W.; Huang, P.; Shang, H.G.; Leng, Y. A brief analysis on tea import and export trade in China during 2021. China Tea 2022, 44, 25–30. [Google Scholar]
- Gamage, A.; Wickramaratne, W.P.R. Quality of life and quality of work life as determinants of employee productivity: Self-reports of tea harvesters in Sri Lanka. Emerg. Mark. J. 2021, 11, 51–59. [Google Scholar]
- Oxford Business Group. Growth Prospects for Sri Lanka’s Tea Industry. 2016. Available online: http://www.oxfordbusinessgroup.com (accessed on 19 September 2016).
- Bai, Q.H. Experimental study on reciprocating cutting tea cutter. J. Anhui Inst. Technol. 1985, 2, 32–47. [Google Scholar]
- Xiao, H.R.; Qin, G.M.; Song, Z.Y. Study on the development strategy of tea production mechanization. China Tea 2011, 7, 8–11. [Google Scholar]
- Abesinghe, A.M.S.K.; Amaratunga, K.S.P.; Ekanayake, E.M.A.C.; Kavindi, M.A.R.; Mohotti, A.J. Developing a selective tea plucking mechanism using image processing for a drone-based tea harvesting machine. Glob. Sci. J. 2020, 11, 526–533. [Google Scholar]
- Li, Y.M.; Qin, T.D.; Chen, J.; Zhao, Z. Experimental study and analysis on mechanical property of corn stalk reciprocating cutting. Trans. CSAE 2011, 27, 160–164. [Google Scholar]
- Huang, M.S.; Li, Y.M.; Chen, A.Y.; Xu, L.Z. Design and test of double-cutterbar structure on wide header for main crop rice harvesting. Appl. Sci. 2020, 10, 4432. [Google Scholar] [CrossRef]
- Guo, J.; Zhang, Q.Y.; Muhammad, S.M.; Ji, C.Y.; Zhao, Z. Design and experiment of bionic mole’s toe arrangement serrated blade for soil-rototilling and straw-shattering. Trans. CSAE 2017, 33, 43–50. [Google Scholar]
- Johnson, P.C.; Clementson, C.L.; Mathanker, S.K.; Grift, T.E.; Hansen, A.C. Cutting energy characteristics of miscanthus x giganteus stems with varying oblique angle and cutting speed. Biosyst. Eng. 2012, 112, 42–48. [Google Scholar] [CrossRef]
- Sunil, K.M.; Tony, E.G.; Alan, C.H. Effect of blade oblique angle and cutting speed on cutting energy for energycane stems. Biosyst. Eng. 2015, 113, 64–70. [Google Scholar]
- Han, Y.; Xiao, H.R.; Qiu, G.M.; Song, Z.Y.; Ding, W.Q.; Mei, S. Studies on develop situations of tea-leaf picker both at home and abroad. J. Chin. Agric. Mech. 2014, 35, 20–24. [Google Scholar]
- Liu, Y.; Li, Z.K.; Wu, H.T. Design and analysis of reciprocating cutter velocity parameter’s optimization. Res. Agric. Mech. 2011, 8, 42–45. [Google Scholar]
- Song, Y.Y.; Li, W.N.; Li, B.; Zhang, Z.Z. Design and test of crawler type intelligent tea picker. Res. Agric. Mech. 2020, 8, 123–127. [Google Scholar]
- Wu, X.K.; Li, B.; Wang, X.Y.; Li, S.Q.; Zeng, C. Design and analysis of single knapsack tea plucking machine. Res. Agric. Mech. 2017, 39, 92–96. [Google Scholar]
- Yang, Y.W.; Tong, J.; Ma, Y.H.I.; Li, M.; Jiang, X.H.; Li, J.G. Design and experiment of bionic soil-cutting blade based on multi-claw combination of mole rat. Trans. CSAM 2018, 49, 122–128. [Google Scholar]
- Ren, L.Q.; Han, Z.W.; Li, J.Q.; Tong, J. Experimental investigation of bionic rough curved soil cutting blade surface to reduce soil adhesion and friction. Soil Tillage Res. 2006, 85, 1–12. [Google Scholar] [CrossRef]
- Ball, G.E.; Acorn, J.H.; Shpeley, D. Mandibles and labrum-epipharynx of tiger beetles: Basic structure and evolution (Coleoptera, Carabidae, Cicindelitae). ZooKeys 2011, 147, 39–83. [Google Scholar]
- Wang, W.; Aibing, Y.U.; Chai, G.; Wang, J.; Xie, Z.; Wu, Z.J. Development of cutting tool bionic technology. Ordnance Mater. Sci. Eng. 2013, 36, 92–97. [Google Scholar]
- Yang, Y.W.; Li, M.; Jin, T.; Ma, Y. Study on the interaction between soil and the five-claw combination of a mole using the discrete element method. Appl. Bionics Biomech. 2018, 2018, 7854052. [Google Scholar] [CrossRef] [PubMed]
- Tong, J.; Xu, S. Design of a bionic blade for vegetable chopper. J. Bionic Eng. 2017, 14, 163–171. [Google Scholar] [CrossRef]
- Stevenson, P.A.; Rillich, J. Fight or flee? Lessons from insects on aggression. Neuroforum 2019, 25, 3–14. [Google Scholar]
- Chang, Z.Y.; Liu, W.; Tong, J.; Guo, L.; Xie, H.; Yang, X.; Mu, H.F.; Chen, D.H. Design and experiments of biomimetic stubble cutter. J. Bionic Eng. 2016, 13, 335–343. [Google Scholar] [CrossRef]
- Tian, K.P.; Li, X.W.; Shen, C.; Zhang, B.; Huang, J.C.; Wang, J.G.; Zhou, Y. Design and test of cutting blade of cannabis harvester based on longicorn bionic principle. Trans. CSAE 2017, 33, 56–61. [Google Scholar]
- Du, Z.; Hu, Y.G.; Lu, Y.Z.; Pang, J.; Li, X.P. Design of structural parameters of cutters for tea harvest based on biomimetic methodology. Appl. Bionics Biomech. 2021, 2021, 8798299. [Google Scholar] [CrossRef]
- Jin, X.Y. Optimum cutting speed of tea picking machine and light pruning machine. J. Fujian Agric. For. Univ. 1993, 4, 470–475. [Google Scholar]
- Qian, Z.G.; Ru, L.J. Design of 6CDW-220 miniature tea picking machine. Chin. Tea Process. 2015, 2, 58–60. [Google Scholar]
- Shi, Y.Y.; Chen, M.; Wang, X.C.; Zhang, Y.N.; Odhiambo, M.O. Dynamic simulation and experiments on artemisia selengensis orderly harvester cutter. Trans. CSAM 2017, 48, 110–116. [Google Scholar]
- Box, G.E.P.; Behnken, D.W. Some new three level designs for the study of quantitative variables. Technometrics 1960, 2, 455–475. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Defining the effect of sweep tillage tool cutting edge geometry on tillage forces using 3D discrete element modelling. Inf. Process. Agric. 2015, 2, 130–141. [Google Scholar] [CrossRef] [Green Version]
- Jia, H.L.; Li, C.Y.; Zhang, Z.H.; Wang, G. Design of bionic saw blade for corn stalk cutting. J. Bionic Eng. 2013, 10, 497–505. [Google Scholar] [CrossRef]
- Eissa, A.A.; Gomaa, H.B.; Baiomay, M.H.; Ibrahim, A.A.A. Physical and mechanical characteristics for some agricultural residues. Misr J. Agric. Eng. 2018, 25, 121–147. [Google Scholar]
- Tavaokli, H.; Mohtasebi, S.S.; Jafari, A. Effects of moisture content, internode position and loading rate on the bending characteristics of barley straw. Res. Agric. Eng. 2009, 55, 45–51. [Google Scholar] [CrossRef] [Green Version]
- Navas, E.; Fernandez, R.; Manuel Armada, D.S.; Gonzalez-de-Santos, P. A design criterion based on shear energy consumption for robotic harvesting tools. Agronomy 2020, 10, 734. [Google Scholar] [CrossRef]
- Hu, J.P.; Pan, J.H.; Dai, B.W.; Chai, X.Y.; Sun, Y.X.; Xu, L.Z. Development of an attitude adjustment crawler chassis for combine harvester and Experiment of adaptive leveling system. Agronomy 2022, 12, 717. [Google Scholar] [CrossRef]
- Xie, B.W.; Jin, M.H.; Duan, J.L.; Yang, Z.; Xu, S.Q.; Luo, Y.K.; Wang, H.J. Design and analysis of a flexible adaptive supporting device for banana harvest. Agronomy 2022, 12, 593. [Google Scholar] [CrossRef]
- Wang, B.; Li, R.Q.; Sun, J.X.; Wei, D.H.; Chen, Y.Y. Experiment on mechanical properties of mulberry in spring cutting period. Equip. Manuf. Technol. 2021, 12, 13–19. [Google Scholar]
- Sun, J.F.; Huo, D.F.; Li, B.; Xing, K.F.; Wang, W.Q.; Yang, Z. Wear Performance of electric pruning scissors based on bionic micro-structure. Trans. CSAM 2020, 51, 593–602. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Factor | ||
|---|---|---|---|
| Inter-Node Number | Tea Variety | Blade Type | |
| −1 | 2 | Maolv | Ordinary blade |
| 0 | 3 | Zhongcha108 | Bionic blade e |
| 1 | 4 | Baicha | Bionic blade f |
| No. | Factor | Evaluation Index | |||
|---|---|---|---|---|---|
| x1 | x2 | x3 | y | w | |
| 1 | 0 | 1 | 1 | 12.025 | 1.395 |
| 2 | 1 | 0 | 0 | 17.554 | 3.096 |
| 3 | 0 | −1 | 1 | 13.626 | 1.055 |
| 4 | −1 | −1 | 0 | 12.161 | 0.851 |
| 5 | −1 | 1 | 0 | 13.321 | 1.777 |
| 6 | 0 | 0 | 0 | 13.626 | 1.055 |
| 7 | 1 | −1 | 0 | 11.973 | 0.714 |
| 8 | 1 | 1 | 0 | 12.937 | 1.093 |
| 9 | 1 | 0 | 0 | 11.756 | 0.886 |
| 10 | −1 | 0 | 1 | 11.286 | 0.935 |
| 11 | 1 | 0 | −1 | 12.835 | 1.344 |
| 12 | 1 | 0 | 1 | 12.869 | 0.824 |
| 13 | 0 | 1 | 0 | 13.655 | 1.494 |
| 14 | −1 | 0 | −1 | 13.626 | 1.055 |
| 15 | 0 | 0 | 1 | 13.626 | 1.055 |
| 16 | 0 | 0 | 0 | 13.626 | 1.055 |
| 17 | −1 | 0 | −1 | 11.961 | 2.585 |
| Source | Sun of Squares | df | Mean Square | F Value | p Value |
|---|---|---|---|---|---|
| Model | 29.91 | 9 | 3.32 | 15.39 | 0.0008 ** |
| A-A | 9.04 | 1 | 9.04 | 41.84 | 0.0003 ** |
| B-B | 0.41 | 1 | 0.41 | 1.88 | 0.2128 |
| C-C | 3.82 | 1 | 3.82 | 17.68 | 0.004 ** |
| AB | 0.0053 | 1 | 0.0053 | 0.025 | 0.8796 |
| AC | 7.63 | 1 | 7.63 | 35.33 | 0.0006 ** |
| BC | 0.029 | 1 | 0.029 | 0.13 | 0.7253 |
| A^2 | 1.07 | 1 | 1.07 | 4.93 | 0.0618 |
| B^2 | 7.69 | 1 | 7.69 | 35.61 | 0.0006 ** |
| C^2 | 0.38 | 1 | 0.38 | 1.74 | 0.2285 |
| Residual | 1.51 | 7 | 0.22 | ||
| Lack of fit | 1.51 | 3 | 0.5 | ||
| Pure error | 0 | 4 | 0 | ||
| Cor total | 31.43 | 16 | |||
| R2 | 0.9519 | ||||
| Adj. R2 | 0.89 |
| Source | Sun of Squares | df | Mean Square | F Value | p Value |
|---|---|---|---|---|---|
| Model | 5.45 | 9 | 0.61 | 3.79 | 0.0465 * |
| A-A | 0.77 | 1 | 0.77 | 4.83 | 0.064 |
| B-B | 0.0076 | 1 | 0.0076 | 0.047 | 0.8341 |
| C-C | 2.74 | 1 | 2.74 | 17.13 | 0.0044 ** |
| AB | 0.044 | 1 | 0.044 | 0.28 | 0.6158 |
| AC | 0.015 | 1 | 0.015 | 0.092 | 0.7711 |
| BC | 0.000001 | 1 | 0.000001 | 0.0000063 | 0.9981 |
| A^2 | 0.88 | 1 | 0.88 | 5.49 | 0.0516 |
| B^2 | 0.39 | 1 | 0.39 | 2.41 | 0.1643 |
| C^2 | 0.63 | 1 | 0.63 | 3.96 | 0.087 |
| Residual | 1.12 | 7 | 0.16 | ||
| Lack of fit | 1.12 | 3 | 0.37 | ||
| Pure error | 0 | 4 | 0 | ||
| Cor total | 6.57 | 16 | |||
| R2 | 0.8296 | ||||
| Adj. R2 | 0.6104 |
| Level | Factor | |||
|---|---|---|---|---|
| A | B/° | C | ||
| Cutting Speed/m·s−1 | Forward Speed/m·s−1 | |||
| 1 | 0.48 | 0.60 | −3 | Ordinary cutter |
| 2 | 0.64 | 0.80 | 0 | Bionic cutter e |
| 3 | 0.80 | 1.00 | 3 | Bionic cutter f |
| No. | A | B/° | C | M/% | N/% | |
|---|---|---|---|---|---|---|
| Cutting Speed/m·s−1 | Forward Speed/m·s−1 | |||||
| 1 | 0.48 | 0.60 | −3 | Ordinary cutter | 90.94 | 5.18 |
| 2 | 0.48 | 0.60 | 0 | Bionic cutter e | 90.53 | 5.13 |
| 3 | 0.48 | 0.60 | 3 | Bionic cutter f | 81.60 | 5.61 |
| 4 | 0.64 | 0.80 | −3 | Bionic cutter e | 93.13 | 3.57 |
| 5 | 0.64 | 0.80 | 0 | Bionic cutter f | 96.04 | 5.04 |
| 6 | 0.64 | 0.80 | 3 | Ordinary cutter | 80.50 | 7.07 |
| 7 | 0.80 | 1.00 | −3 | Bionic cutter f | 94.41 | 3.99 |
| 8 | 0.80 | 1.00 | 0 | Ordinary cutter | 93.01 | 4.15 |
| 9 | 0.80 | 1.00 | 3 | Bionic cutter e | 87.64 | 4.58 |
| Integrity rate | Index | A | B | C | ||
| Mean value-1 | 87.689 | 92.827 | 87.816 | |||
| Mean value-2 | 89.558 | 92.524 | 90.433 | |||
| Mean value-3 | 91.351 | 83.247 | 90.348 | |||
| Range | 3.662 | 9.580 | 2.284 | |||
| Factor order | B > A > C | |||||
| Better combination | A3B1C2 | |||||
| Missing rate | Index | 5.307 | 4.247 | 5.466 | ||
| Mean value-1 | 5.227 | 4.771 | 4.428 | |||
| Mean value-2 | 4.238 | 5.755 | 4.879 | |||
| Mean value-3 | 1.069 | 1.508 | 1.039 | |||
| Range | 5.307 | 4.247 | 5.466 | |||
| Factor order | B > A > C | |||||
| Better combination | A3B1C2 | |||||
| Integrity Rate | Missing Rate | ||||||
|---|---|---|---|---|---|---|---|
| Factor | Freedom | Sum of Squares of Deviations | F Value | Factor | Freedom | Sum of Squares of Deviations | F Value |
| A | 2 | 20.11 | 1.56 | A | 2 | 2.13 | 1.57 |
| B | 2 | 177.94 | 13.79 * | B | 2 | 3.52 | 2.61 |
| C | 2 | 13.27 | 1.03 | C | 2 | 1.63 | 1.21 |
| Error | 2 | 12.91 | Error | 2 | 1.35 | ||
| Total | 8 | 224.23 | Total | 8 | 8.62 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, Z.; Li, D.; Ji, J.; Zhang, L.; Li, X.; Wang, H. Bionic Optimization Design and Experiment of Reciprocating Cutting System on Single-Row Tea Harvester. Agronomy 2022, 12, 1309. https://doi.org/10.3390/agronomy12061309
Du Z, Li D, Ji J, Zhang L, Li X, Wang H. Bionic Optimization Design and Experiment of Reciprocating Cutting System on Single-Row Tea Harvester. Agronomy. 2022; 12(6):1309. https://doi.org/10.3390/agronomy12061309
Chicago/Turabian StyleDu, Zhe, Denghui Li, Jiangtao Ji, Liyuan Zhang, Xinping Li, and Huankun Wang. 2022. "Bionic Optimization Design and Experiment of Reciprocating Cutting System on Single-Row Tea Harvester" Agronomy 12, no. 6: 1309. https://doi.org/10.3390/agronomy12061309
APA StyleDu, Z., Li, D., Ji, J., Zhang, L., Li, X., & Wang, H. (2022). Bionic Optimization Design and Experiment of Reciprocating Cutting System on Single-Row Tea Harvester. Agronomy, 12(6), 1309. https://doi.org/10.3390/agronomy12061309