
A Data-Driven Dynamic Obstacle Avoidance Method for Liquid-Carrying Plant Protection UAVs


 ,
,  and
and 
Abstract
:1. Introduction
2. Material and Methods
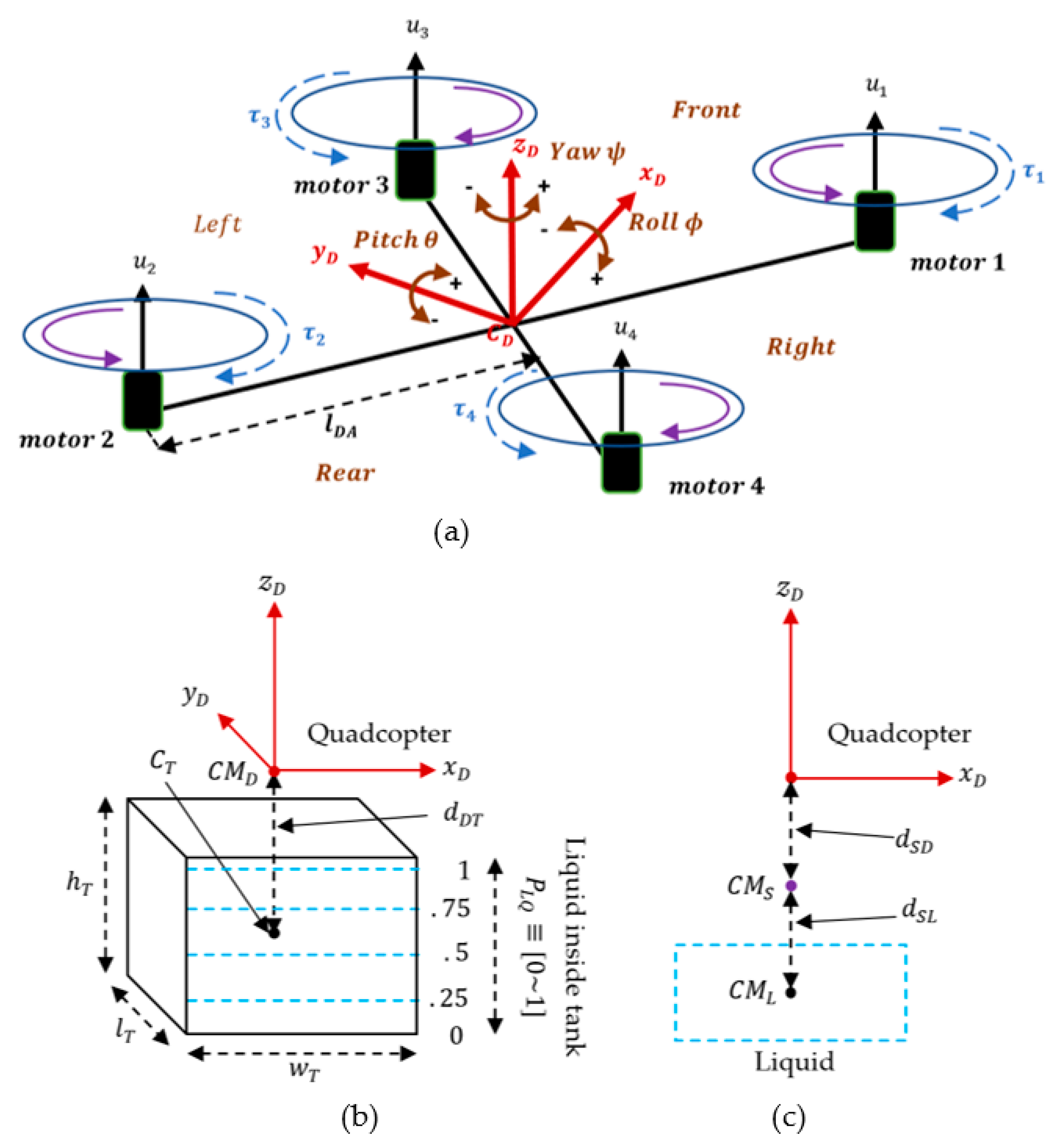
2.1. Model
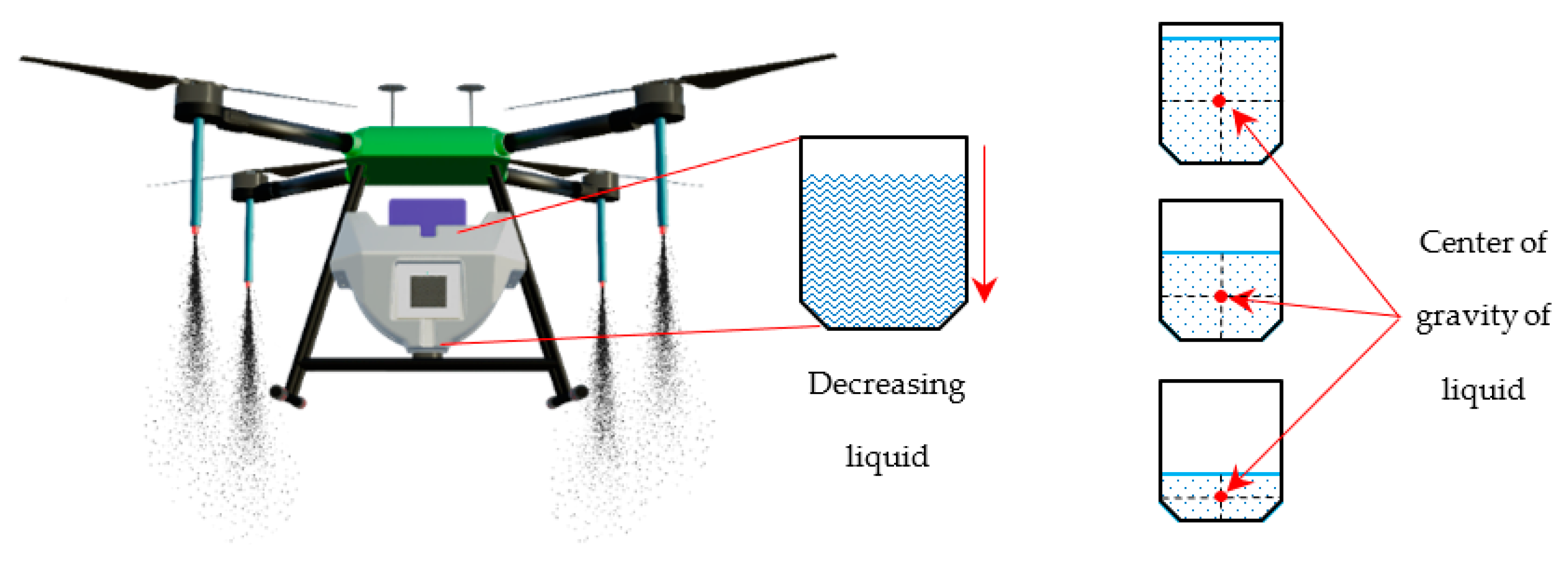
2.1.1. Quadrotor and Tank Liquid Level Formation
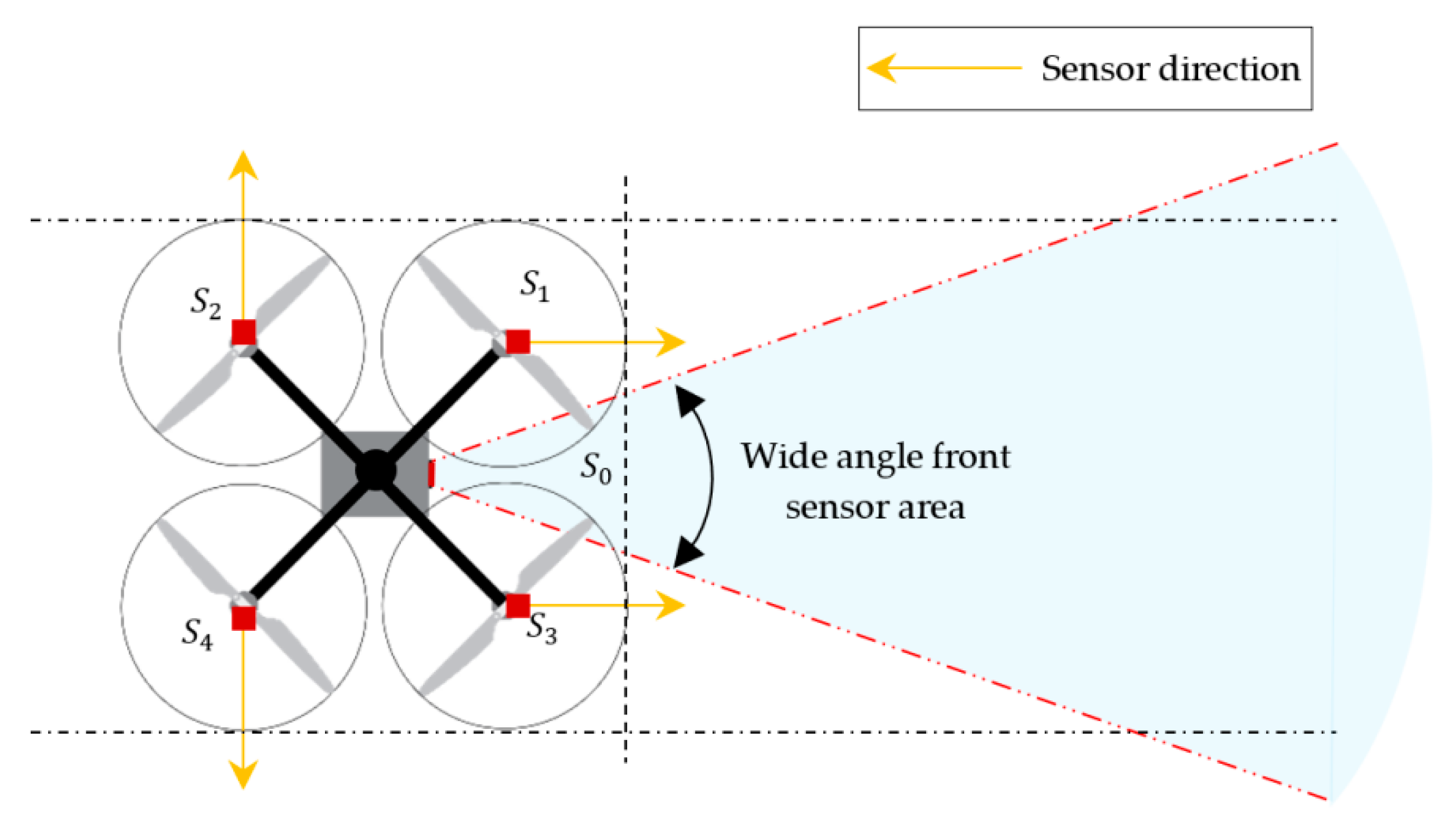
2.1.2. Sensor Model
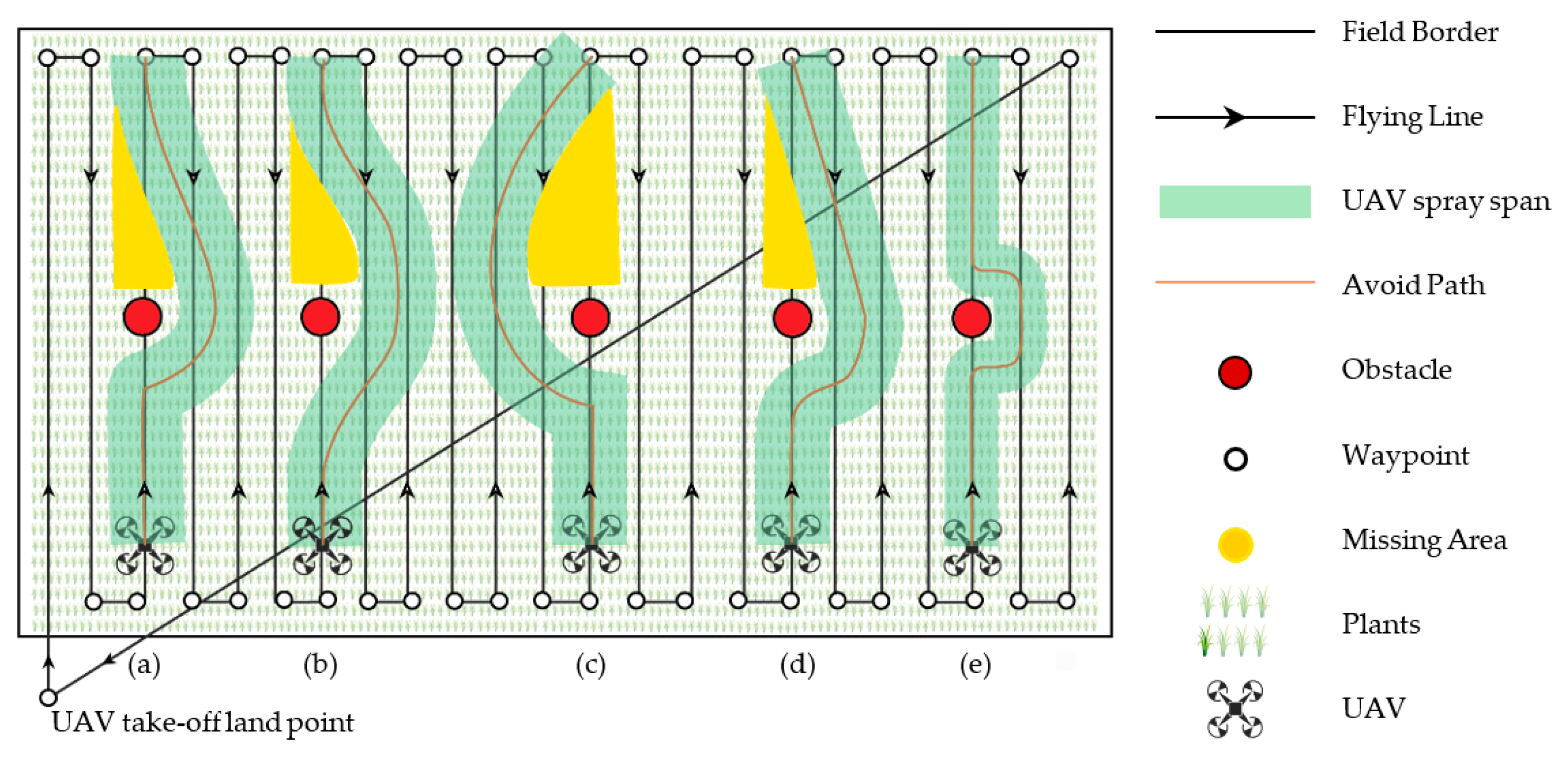
2.2. Path Planning Algorithm
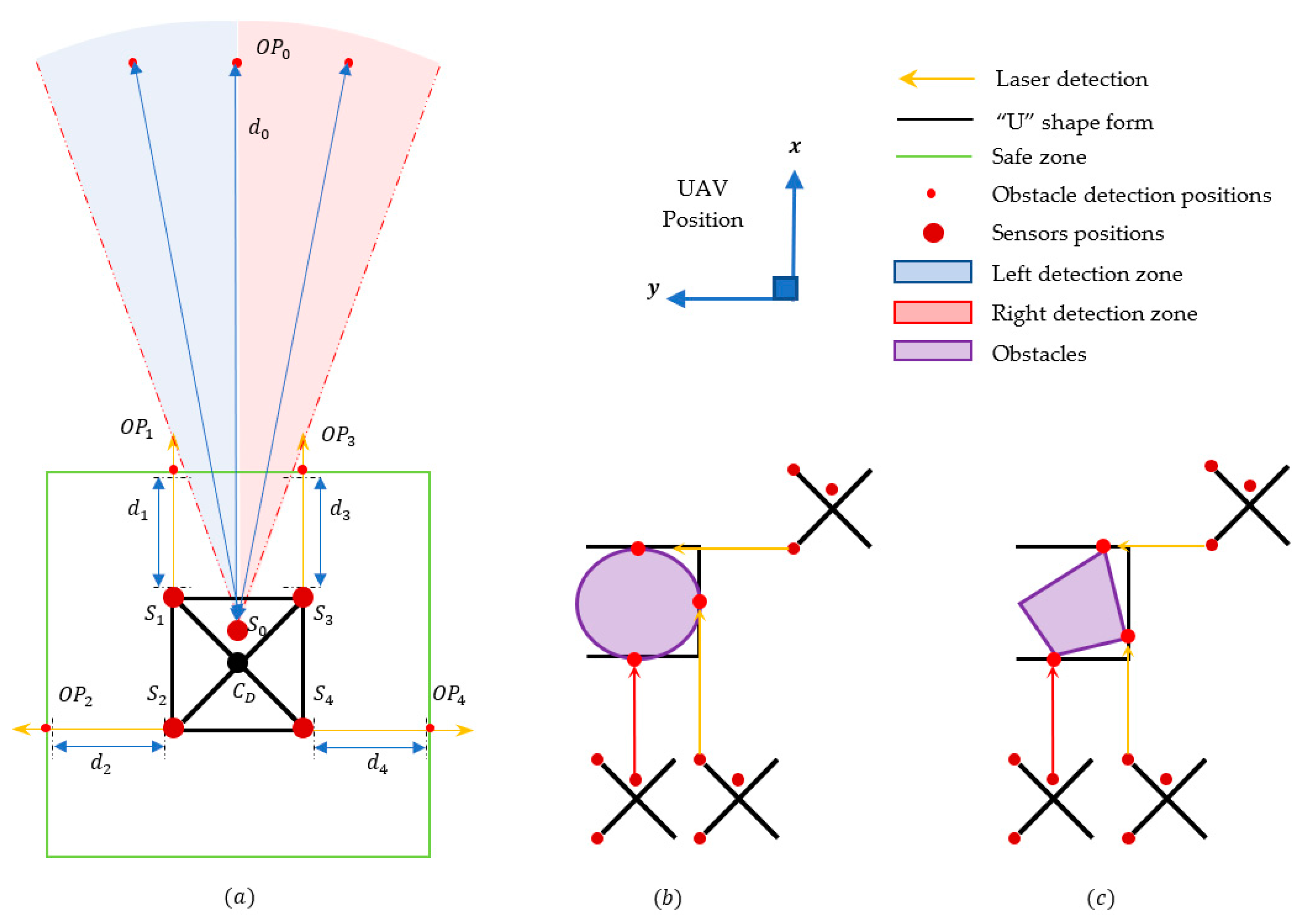
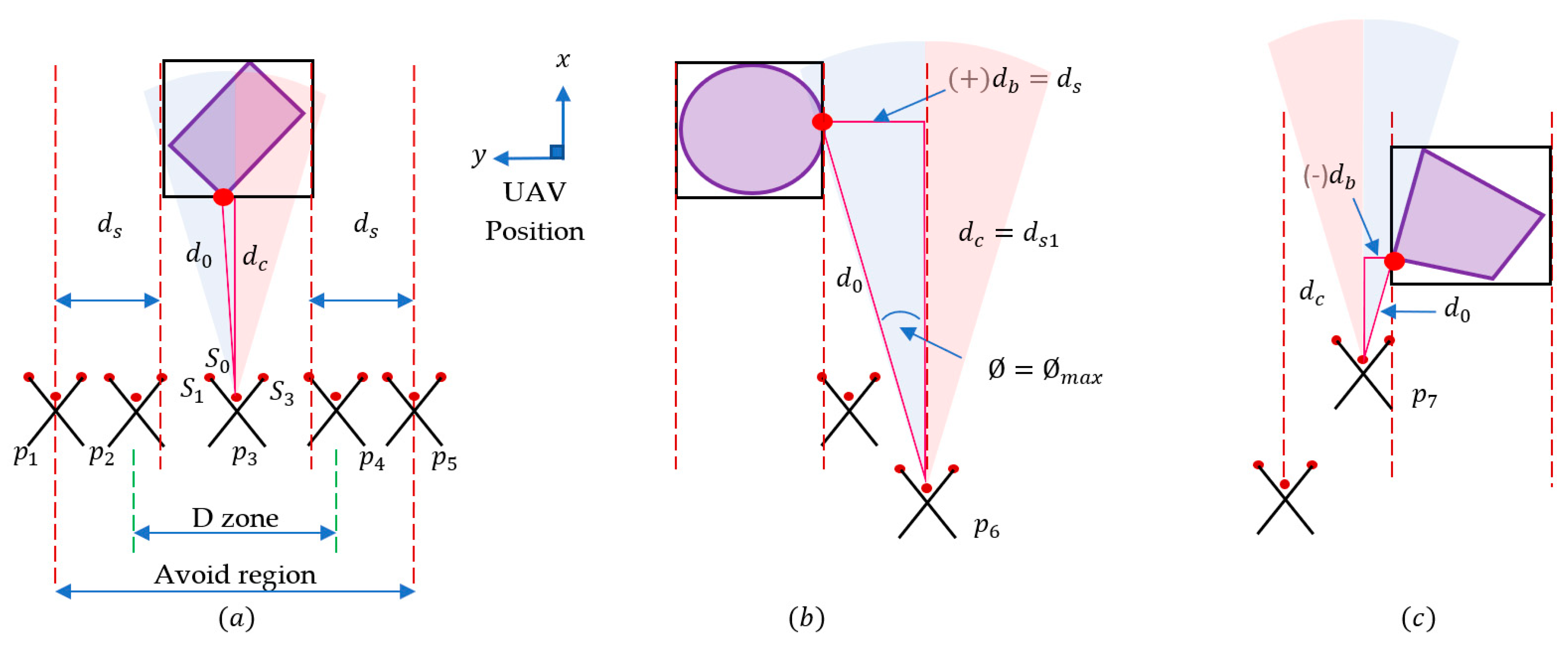
2.2.1. Distance Definition
Safe Distance around the Obstacle
Slowdown Distance
Obstacle Information and Formation
First Safe Distance and Maneuver Direction
Algorithm Formation with State Machine
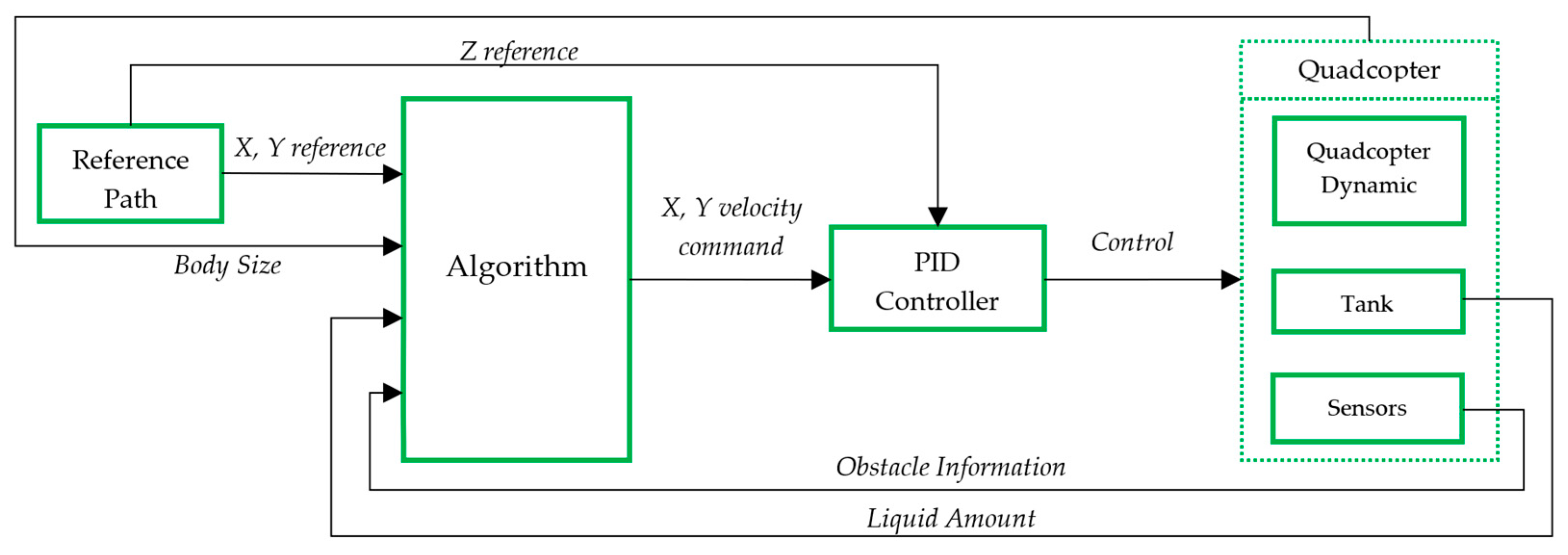
2.3. Data-Driven Control
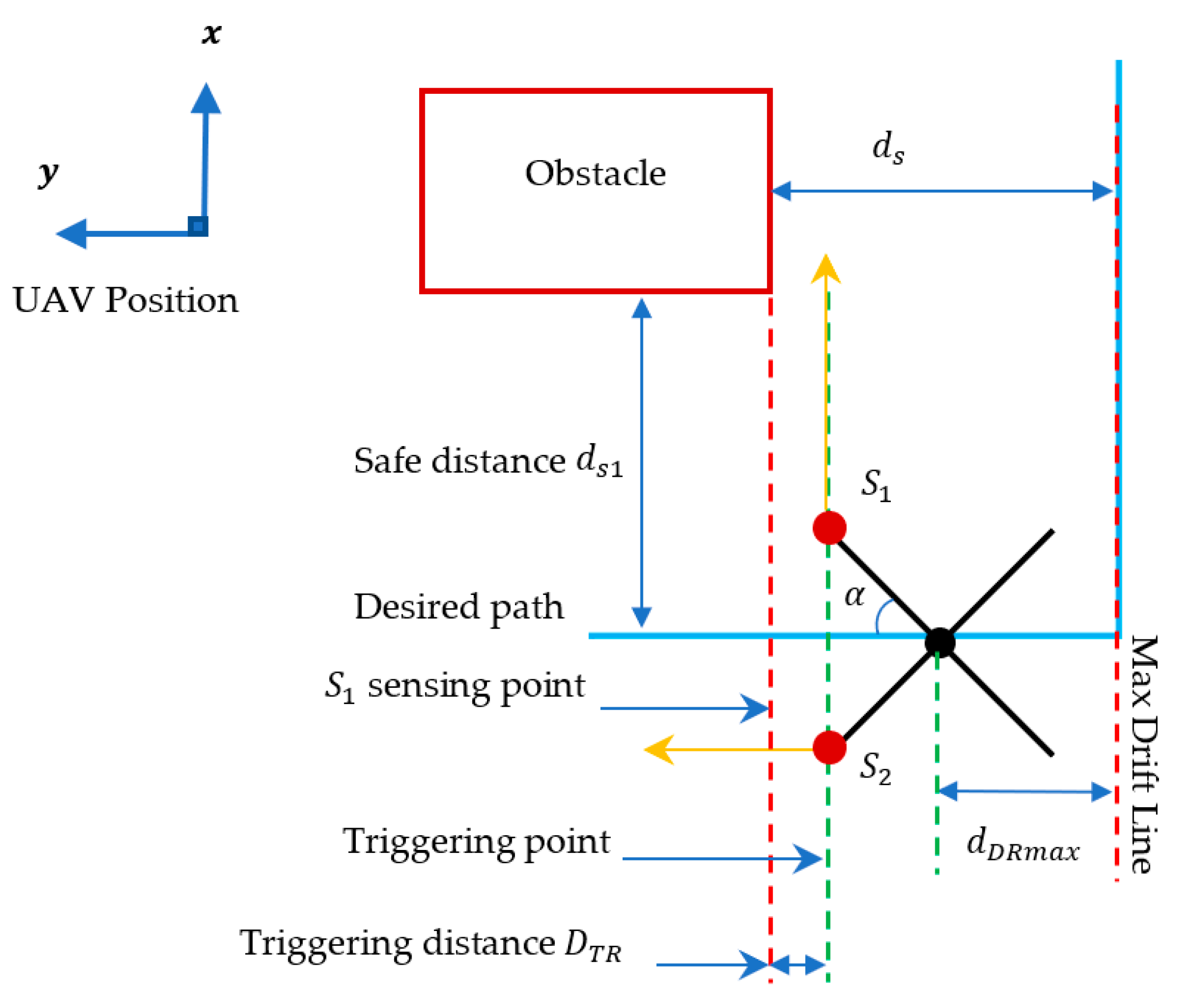
2.3.1. Drift Distance
2.3.2. Avoidance Velocity
2.3.3. Triggering Time
3. Numerical Simulation
3.1. Performance Simulation and Results
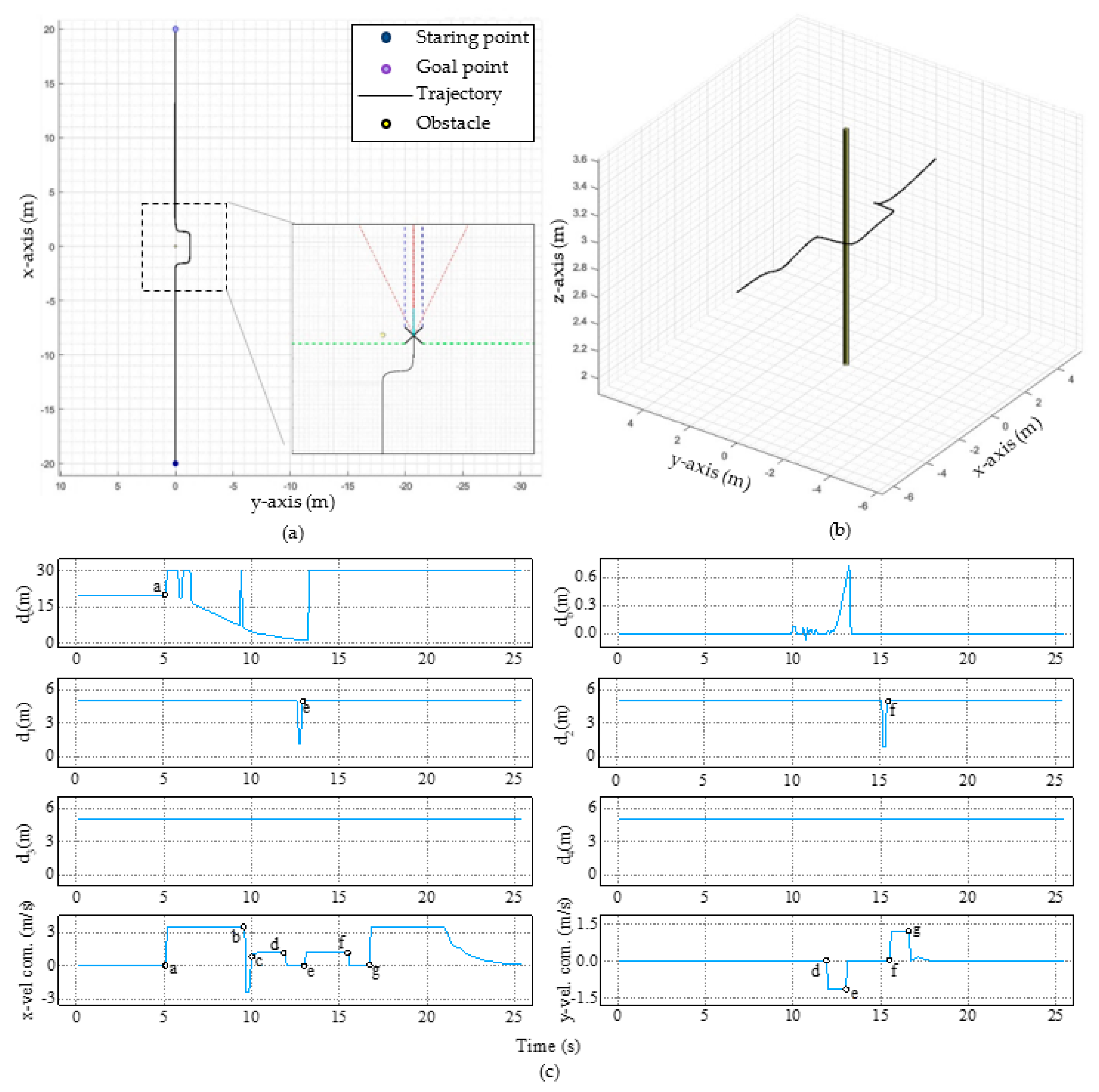
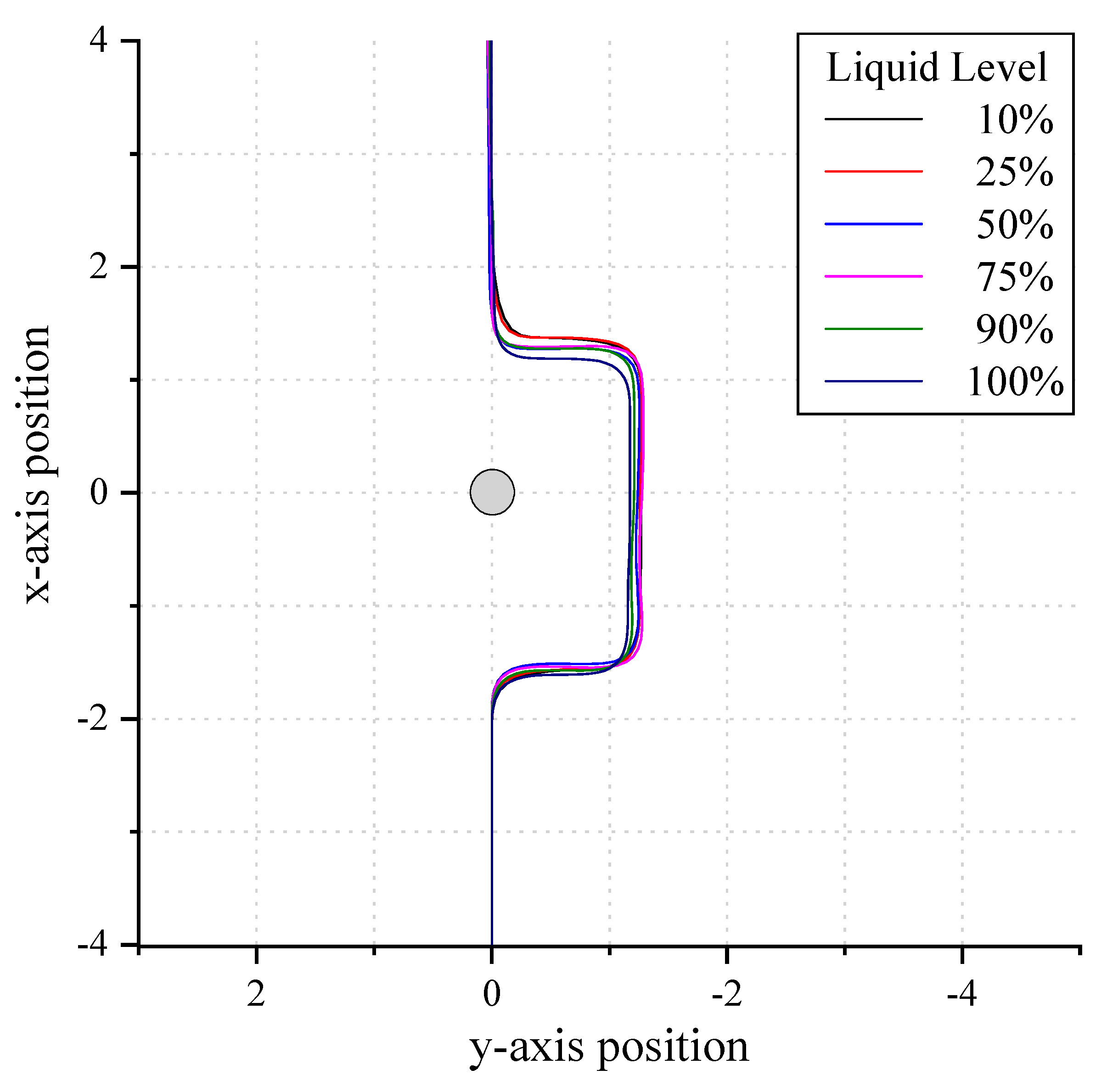
3.1.1. Test Segment 1 (Single-Obstacle Avoidance Tests)
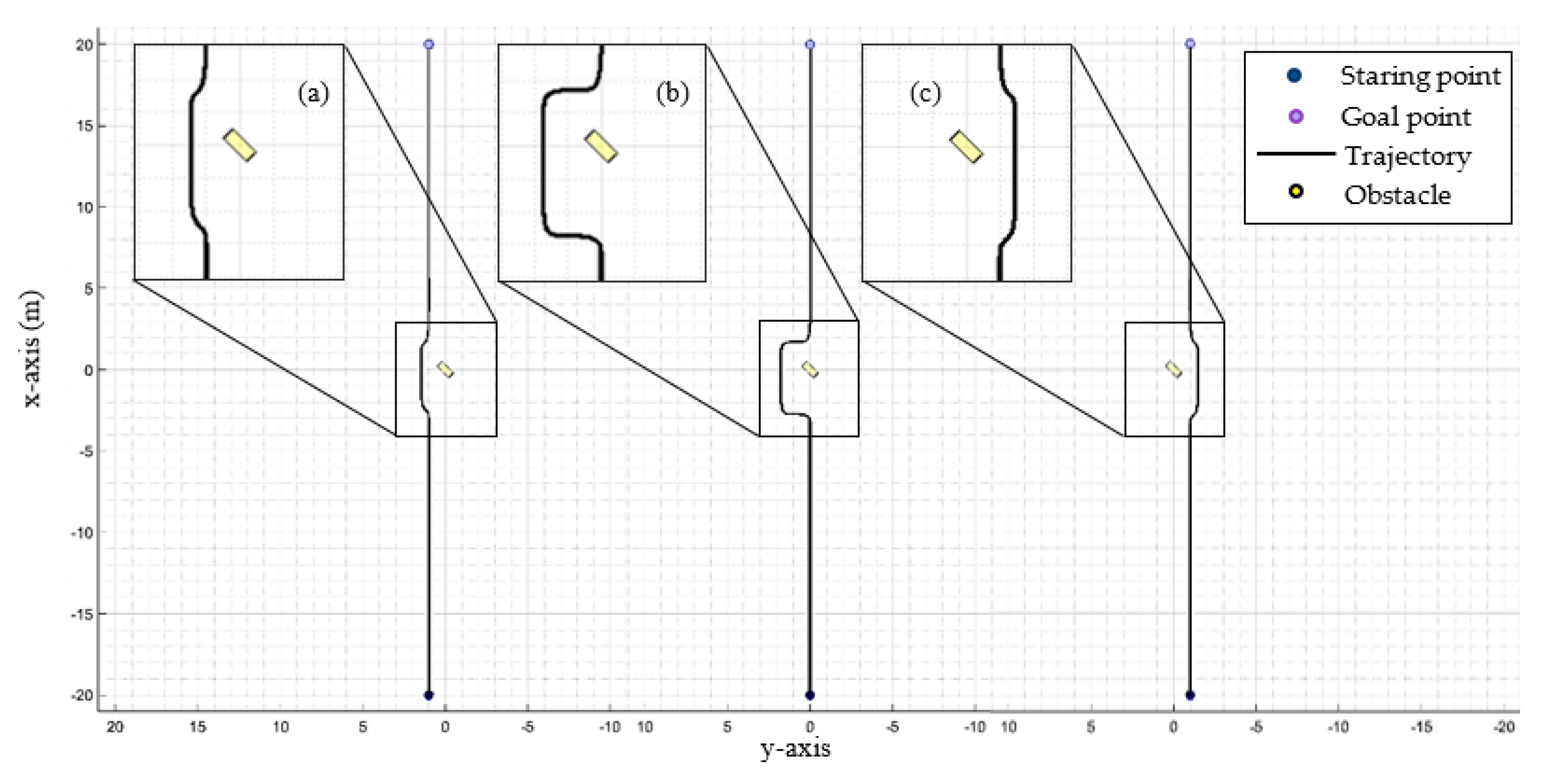
3.1.2. Test Segment 2 (Possible Obstacle Situations in the Farmland)
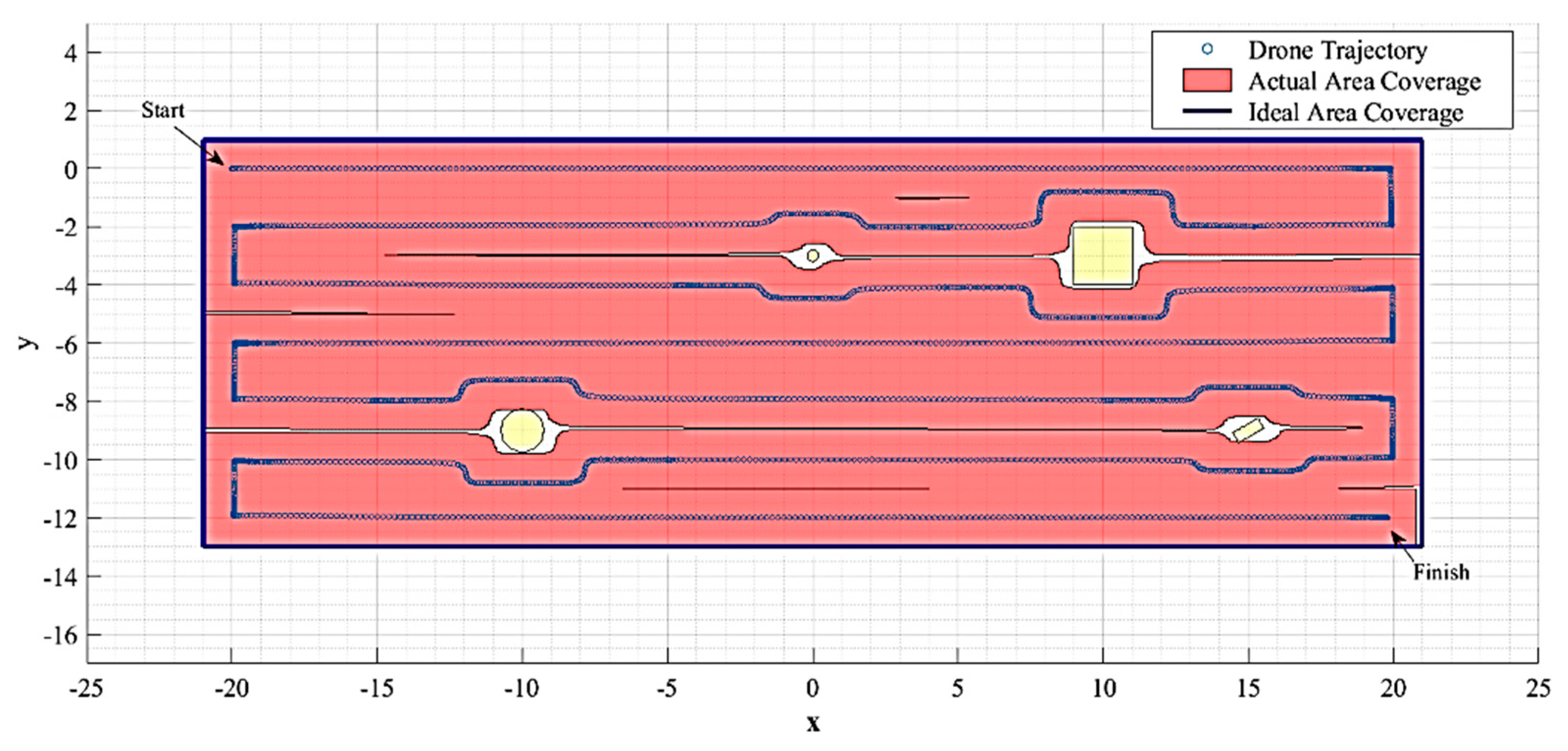
3.1.3. Test Segment 3 (Spraying Mission Simulation and Performance)
3.1.4. Test Segment 4 (Scalability)
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Suprem, A.; Mahalik, N.; Kim, K. A review on application of technology systems, standards and interfaces for agriculture and food sector. Comput. Stand. Interfaces 2013, 35, 355–364. [Google Scholar] [CrossRef]
- Mogili, U.R.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Sanca, A.S.; Alsina, P.J.; Jés de Jesus, F.C. Dynamic modelling of a quadrotor aerial vehicle with nonlinear inputs. In Proceedings of the 2008 IEEE Latin American Robotic Symposium, Natal, Brazil, 29–30 October 2008; pp. 143–148. [Google Scholar] [CrossRef]
- Ryll, M.; Bülthoff, H.; Giordano, P.R. A Novel Overactuated Quadrotor Unmanned Aerial Vehicle: Modeling, Control, and Experimental Validation. IEEE Trans. Control Syst. Technol. 2014, 23, 540–556. [Google Scholar] [CrossRef] [Green Version]
- Marino, S.; Alvino, A. Detection of Spatial and Temporal Variability of Wheat Cultivars by High-Resolution Vegetation Indices. Agronomy 2019, 9, 226. [Google Scholar] [CrossRef] [Green Version]
- Surový, P.; Ribeiro, N.A.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Cilia, C.; Panigada, C.; Rossini, M.; Meroni, M.; Busetto, L.; Amaducci, S.; Boschetti, M.; Picchi, V.; Colombo, R. Nitrogen Status Assessment for Variable Rate Fertilization in Maize through Hyperspectral Imagery. Remote Sens. 2014, 6, 6549–6565. [Google Scholar] [CrossRef] [Green Version]
- Zaman-Allah, M.; Vergara, O.; Araus, J.L.; Tarekegne, A.; Magorokosho, C.; Zarco-Tejada, P.J.; Hornero, A.; Albà, A.H.; Das, B.; Craufurd, P.; et al. Unmanned aerial platform-based multi-spectral imaging for field phenotyping of maize. Plant Methods 2015, 11, 35. [Google Scholar] [CrossRef] [Green Version]
- Chang, A.; Jung, J.; Maeda, M.M.; Landivar, J. Crop height monitoring with digital imagery from Unmanned Aerial System (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- Honkavaara, E.; Kaivosoja, J.; Mäkynen, J.; Pellikka, I.; Pesonen, L.; Saari, H.; Salo, H.; Hakala, T.; Marklelin, L.; Rosnell, T. Hyperspectral reflectance signatures and point clouds for precision agriculture by light weight uav imaging system. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I-7, 353–358. [Google Scholar] [CrossRef] [Green Version]
- Pflanz, M.; Nordmeyer, H.; Schirrmann, M. Weed Mapping with UAS Imagery and a Bag of Visual Words Based Image Classifier. Remote Sens. 2018, 10, 1530. [Google Scholar] [CrossRef] [Green Version]
- Rasmussen, J.; Nielsen, J.; Garciaruiz, F.; Christensen, S.; Streibig, J.C. Potential uses of small unmanned aircraft systems (UAS) in weed research. Weed Res. 2013, 53, 242–248. [Google Scholar] [CrossRef]
- Rahnemoonfar, M.; Sheppard, C. Deep Count: Fruit Counting Based on Deep Simulated Learning. Sensors 2017, 17, 905. [Google Scholar] [CrossRef] [Green Version]
- Lou, Z.; Xin, F.; Han, X.; Lan, Y.; Duan, T.; Fu, W. Effect of Unmanned Aerial Vehicle Flight Height on Droplet Distribution, Drift and Control of Cotton Aphids and Spider Mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Q.; Xin, F.; Lou, Z.; Zhou, T.; Wang, G.; Han, X.; Lan, Y.; Fu, W. Effect of Aviation Spray Adjuvants on Defoliant Droplet Deposition and Cotton Defoliation Efficacy Sprayed by Unmanned Aerial Vehicles. Agronomy 2019, 9, 217. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, F.; Qiu, B.; Dong, X.; Ma, J.; Huang, X.; Ahmed, S.; Chandio, F.A. Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron. Agric. 2020, 172, 105350. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, H.; Liao, C.; Zhang, Q.; Cenglin, X.; Juying, H.; Zhang, J.; Yan, H.; Li, J.; Xiwen, L. Effects of Supplementary Pollination by Single-rotor Agricultural Unmanned Aerial Vehicle in Hybrid Rice Seed Production. Agric. Sci. Technol. 2017, 18, 543–552. [Google Scholar]
- Xiongkui, H.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar] [CrossRef]
- Xue, X.; Lan, Y.; Sun, Z.; Chang, C.; Hoffmann, W.C. Develop an unmanned aerial vehicle based automatic aerial spraying system. Comput. Electron. Agric. 2016, 128, 58–66. [Google Scholar] [CrossRef]
- Chakravarthy, A.; Ghose, D. Obstacle avoidance in a dynamic environment: A collision cone approach. IEEE Trans. Syst. Man, Cybern.-Part A Syst. Hum. 1998, 28, 562–574. [Google Scholar] [CrossRef] [Green Version]
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Kumar, B.A.; Ghose, D. Radar-assisted collision avoidance/guidance strategy for planar flight. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 77–90. [Google Scholar] [CrossRef] [Green Version]
- Olivares-Mendez, M.A.; Mejias, L.; Campoy, P.; Mellado-Bataller, I. Cross-Entropy Optimization for Scaling Factors of a Fuzzy Controller: A See-and-Avoid Approach for Unmanned Aerial Systems. J. Intell. Robot. Syst. 2012, 69, 189–205. [Google Scholar] [CrossRef] [Green Version]
- Zou, Y.; Wang, C.; Wang, J.; Yan, G. Obstacle-Avoidance Control Method for Unmanned Aerial Vehicle (UAV), Flight Controller and Uav. U.S. Patent 20190271992A1, 5 September 2019. [Google Scholar]
- Zou, Y. Method of Controlling Obstacle Avoidance for Unmanned Aerial Vehicle and Unmanned Aerial Vehicle. U.S. Patent 20190278303A1, 12 September 2019. [Google Scholar]
- Richards, A.; How, J.P. Aircraft trajectory planning with collision avoidance using mixed integer linear programming. In Proceedings of the 2002 American Control Conference (IEEE Cat. No. CH37301), Anchorage, AK, USA, 8–10 May 2002; pp. 1936–1941. [Google Scholar] [CrossRef]
- Lozano-Perez, T.; Wesley, M.A. An algorithm for planning collision-free paths among polyhedral obstacles. Commun. ACM 1979, 22, 560–570. [Google Scholar] [CrossRef]
- Wang, X.; Yadav, V.; Balakrishnan, S.N. Cooperative UAV Formation Flying with Obstacle/Collision Avoidance. IEEE Trans. Control Syst. Technol. 2007, 15, 672–679. [Google Scholar] [CrossRef]
- Park, J.; Baek, H. Stereo vision based obstacle collision avoidance for a quadrotor using ellipsoidal bounding box and hierarchical clustering. Aerosp. Sci. Technol. 2020, 103, 105882. [Google Scholar] [CrossRef]
- Ferrick, A.; Fish, J.; Venator, E.; Lee, G.S. UAV obstacle avoidance using image processing techniques. In Proceedings of the 2012 IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 23–24 April 2012; pp. 73–78. [Google Scholar] [CrossRef]
- Naderhirn, M.; Langthaler, P.; del Re, L. Robust Hybrid Control for Unknown Obstacle Avoidance. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 6181. [Google Scholar] [CrossRef]
- Shanmugavel, M.; Tsourdos, A.; White, B.A. Collision avoidance and path planning of multiple UAVs using flyable paths in 3D. In Proceedings of the 2010 15th International Conference on Methods and Models in Automation and Robotics, Miedzyzdroje, Poland, 23–26 August 2010; pp. 218–222. [Google Scholar] [CrossRef]
- Lalish, E.; Morgansen, K.A.; Tsukamaki, T. Decentralized reactive collision avoidance for multiple unicycle-type vehicles. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 5055–5061. [Google Scholar] [CrossRef]
- Smith, A.; Harmon, F. UAS collision avoidance algorithm minimizing impact on route surveillance. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 6179. [Google Scholar] [CrossRef]
- Cai, X.; De Queiroz, M. Adaptive Rigidity-Based Formation Control for Multirobotic Vehicles with Dynamics. IEEE Trans. Control Syst. Technol. 2014, 23, 389–396. [Google Scholar] [CrossRef]
- Huang, S.; Teo, R.S.H.; Tan, K.K. Collision avoidance of multi unmanned aerial vehicles: A review. Annu. Rev. Control 2019, 48, 147–164. [Google Scholar] [CrossRef]
- Huang, X.; Dong, X.; Ma, J.; Liu, K.; Ahmed, S.; Lin, J.; Qiu, B. The Improved A* Obstacle Avoidance Algorithm for the Plant Protection UAV with Millimeter Wave Radar and Monocular Camera Data Fusion. Remote Sens. 2021, 13, 3364. [Google Scholar] [CrossRef]
- Oksanen, T.; Visala, A. Coverage path planning algorithms for agricultural field machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.; Busato, P.; Berruto, R. Benefits from optimal route planning based on B-patterns. Biosyst. Eng. 2013, 115, 389–395. [Google Scholar] [CrossRef]
- Fengbo, Y.; Xinyu, X.; Ling, Z.; Zhu, S. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover. Int. J. Agric. Biol. Eng. 2017, 10, 41–53. [Google Scholar] [CrossRef] [Green Version]
- Bodur, M.; Mehrolhassani, M.B.A.M. Satellite Images-based Obstacle Recognition and Trajectory Generation for Agricultural Vehicles. Int. J. Adv. Robot. Syst. 2015, 12, 188. [Google Scholar] [CrossRef]
- Ahmed, S.; Qiu, B.; Ahmad, F.; Kong, C.-W.; Xin, H. A State-of-the-Art Analysis of Obstacle Avoidance Methods from the Perspective of an Agricultural Sprayer UAV’s Operation Scenario. Agronomy 2021, 11, 1069. [Google Scholar] [CrossRef]
- Zhou, K.; Jensen, A.L.; Sørensen, C.G.; Busato, P.; Bothtis, D. Agricultural operations planning in fields with multiple obstacle areas. Comput. Electron. Agric. 2014, 109, 12–22. [Google Scholar] [CrossRef]
- Wang, K.; Meng, Z.; Wang, L.; Wu, Z.; Wu, Z. Practical Obstacle Avoidance Path Planning for Agriculture UAVs. In Advances and Trends in Artificial Intelligence. From Theory to Practice; Springer: Berlin/Heidelberg, Germany, 2019; pp. 196–203. [Google Scholar] [CrossRef]
- Ahmed, S.; Xin, H.; Faheem, M.; Qiu, B. Stability Analysis of a Sprayer UAV with a Liquid Tank with Different Outer Shapes and Inner Structures. Agriculture 2022, 12, 379. [Google Scholar] [CrossRef]
- Lan, Y.; Chen, S. Current status and trends of plant protection UAV and its spraying technology in China. Int. J. Precis. Agric. Aviat. 2018, 1, 1–9. [Google Scholar] [CrossRef]
- Lan, Y.; Wang, G. Development Situation and Prospect of Plant Protection UAV in China. Agric. Eng. Technol. 2018, 38, 17–27. [Google Scholar] [CrossRef]
- Quan, Q. Introduction to Multicopter Design and Control, 1st ed.; Springer: Singapore, 2017; pp. 99–120. [Google Scholar]
- Xiang, J.; Zhang, M. Millimeter-Wave Radar and Its Applications; National Defense Industry Press: Beijing, China, 2005. [Google Scholar]
- Donges, A.; Noll, R. Laser Measurement Technology; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Antonucci, F.; Armano, M.; Audley, H.; Auger, G.; Benedetti, M.; Binetruy, P.; Bogenstahl, J.; Bortoluzzi, D.; Bosetti, P.; Brandt, N.; et al. The LISA Pathfinder mission. Class. Quantum Gravity 2012, 29, 124014. [Google Scholar] [CrossRef]
- Rahman, M.; Fan, S.; Zhang, Y.; Chen, L. A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture. Agriculture 2021, 11, 22. [Google Scholar] [CrossRef]
- Rankin, G.; Tirkel, A.; Leukhin, A. Millimeter wave array for UAV imaging MIMO radar. In Proceedings of the 2015 16th International Radar Symposium (IRS), Dresden, Germany, 24–26 June 2015; pp. 499–504. [Google Scholar] [CrossRef]
- Pham, D.D.; Suh, Y.S. Remote length measurement system using a single point laser distance sensor and an inertial measurement unit. Comput. Stand. Interfaces 2016, 50, 153–159. [Google Scholar] [CrossRef]
- Ahmed, S. Dynamic_OA_for_Sprayer_UAV. Available online: https://github.com/shibbir7ahmed/Dynamic_OA_for_Sprayer_UAV (accessed on 26 March 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Operation | Binary Condition | Logical Condition | Next State |
|---|---|---|---|---|
| Follow reference path | 1 | |||
| 0 | ||||
| 1 | ||||
| 0 | ||||
| Decide Avoiding Direction | 1 | |||
| 0 | ||||
| Fly right count time + | 1 | |||
| 0 | ||||
| Fly Left count time + | 1 | |||
| 0 | ||||
| time | 1 | |||
| 0 | ||||
| Fly forward | 1 | |||
| 0 | ||||
| Fly forward | 1 | |||
| 0 | ||||
| time | 1 | |||
| 0 | ||||
| Fly left count time − | 1 | |||
| 0 | ||||
| Fly right count time − | 1 | |||
| 0 |
| Quadrotor | Tank | Millimeter-wave Sensor | Laser Sensor | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Mass | Mass | Frequency | Frequency | ||||||
| Arm Length | Size | FoV Hor. | FoV | Single point | |||||
| Moment of inertia | FoV Ver. | Length | |||||||
| Length | |||||||||
| Liquid level | |||||||||
| Gravity | |||||||||
| Max Trust | |||||||||
| Drift Distance | Liquid Level | |||||
|---|---|---|---|---|---|---|
| 0 | 0.5 | 0.75 | 0.9 | 1.0 | ||
| Velocity | 0.50 | 0.26 | 0.27 | 0.25 | 0.27 | 0.30 |
| 0.75 | 0.38 | 0.39 | 0.38 | 0.43 | 0.58 | |
| 1.00 | 0.51 | 0.52 | 0.52 | 0.67 | 0.94 | |
| 1.10 | 0.56 | 0.57 | 0.57 | 0.78 | 1.12 | |
| 1.25 | 0.63 | 0.65 | 0.71 | 0.95 | 1.41 | |
| Liquid Level | Travel Time | y-Max Move (cm) | z-Max Fall (cm) | Roll Max (deg) | |
|---|---|---|---|---|---|
| Positive | Negative | ||||
| 0.10 | 25.8 | 127.1 | 13.5 | 10.8 | 10.8 |
| 0.25 | 25.5 | 126.8 | 17.5 | 11.7 | 11.9 |
| 0.50 | 27.9 | 125.2 | 15.6 | 12.2 | 12.6 |
| 0.75 | 36.5 | 128.6 | 9.3 | 11.1 | 11.4 |
| 0.90 | 39.1 | 121.1 | 5.0 | 8.2 | 8.2 |
| 1.00 | 43.3 | 117.4 | 2.5 | 4.7 | 4.7 |
| Obstacle’s Information | Mission Waypoint Coordinates (x, y, z) | |||||||
|---|---|---|---|---|---|---|---|---|
| Obstacle | Type | Size (m) | Location (x, y, z) | Rotation/Tilt | Direction ⇓ | 4-m Path Gap | 3-m Path Gap | 2-m Path Gap |
| 1 | Circular | 1 | ||||||
| 2 | Squire | 2 | ||||||
| 3 | Circular | 3 | ||||||
| 4 | Rectangular | 4 | ||||||
| 5 | ||||||||
| 6 | ||||||||
| 7 | ||||||||
| 8 | ||||||||
| 9 | ||||||||
| 10 | ||||||||
| 11 | ||||||||
| 12 | ||||||||
| 13 | ||||||||
| 14 | ||||||||
| 15 | ||||||||
| Configuration | Liquid Level (%) | Mission Time (s) | Average z-Axis Fall (cm) | Actual Length (m) | Increased Length (m) | Area Coverage (%) |
|---|---|---|---|---|---|---|
| Path gap 4 m, Velocity 5 ms−1, Path length 175 m, Total area 704 m2 | 10 | 121.9 | 3.13 | 177.13 | 2.13 | 98.64 |
| 25 | 124.2 | 4.09 | 177.67 | 2.67 | 98.58 | |
| 50 | 140.3 | 3.29 | 177.84 | 2.84 | 98.63 | |
| 75 | 198.1 | 1.72 | 178.12 | 3.12 | 98.9 | |
| 100 | 205.9 | 0.56 | 177.13 | 2.13 | 99.23 | |
| Path gap 3 m, Velocity 3.5 ms−1, Path length 215 m, Total area 645 m2 | 10 | 164.1 | 1.74 | 224.63 | 9.63 | 98.26 |
| 25 | 165.2 | 2.30 | 225.03 | 10.03 | 98.22 | |
| 50 | 184.7 | 2.07 | 225.19 | 10.19 | 98.30 | |
| 75 | 254.6 | 1.18 | 225.00 | 10.00 | 98.55 | |
| 100 | 294.8 | 0.34 | 224.55 | 9.55 | 98.98 | |
| Path gap 2 m, Velocity 2.5 ms−1, Path length 295 m, Total area 588 m2 | 10 | 240.9 | 0.80 | 299.10 | 4.10 | 98.05 |
| 25 | 243.3 | 1.13 | 299.68 | 4.69 | 98.08 | |
| 50 | 263.3 | 1.27 | 300.65 | 5.65 | 98.02 | |
| 75 | 338.8 | 0.95 | 301.22 | 6.22 | 98.13 | |
| 100 | 389.5 | 0.33 | 299.17 | 4.17 | 98.47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, S.; Qiu, B.; Kong, C.-W.; Xin, H.; Ahmad, F.; Lin, J. A Data-Driven Dynamic Obstacle Avoidance Method for Liquid-Carrying Plant Protection UAVs. Agronomy 2022, 12, 873. https://doi.org/10.3390/agronomy12040873
Ahmed S, Qiu B, Kong C-W, Xin H, Ahmad F, Lin J. A Data-Driven Dynamic Obstacle Avoidance Method for Liquid-Carrying Plant Protection UAVs. Agronomy. 2022; 12(4):873. https://doi.org/10.3390/agronomy12040873
Chicago/Turabian StyleAhmed, Shibbir, Baijing Qiu, Chun-Wei Kong, Huang Xin, Fiaz Ahmad, and Jinlong Lin. 2022. "A Data-Driven Dynamic Obstacle Avoidance Method for Liquid-Carrying Plant Protection UAVs" Agronomy 12, no. 4: 873. https://doi.org/10.3390/agronomy12040873
APA StyleAhmed, S., Qiu, B., Kong, C.-W., Xin, H., Ahmad, F., & Lin, J. (2022). A Data-Driven Dynamic Obstacle Avoidance Method for Liquid-Carrying Plant Protection UAVs. Agronomy, 12(4), 873. https://doi.org/10.3390/agronomy12040873