Author Contributions
Conceptualization, X.D. and Y.W.; methodology, X.D. and Z.Y.; software, D.C.; validation, X.D. and Y.Z.; formal analysis, Y.W. and K.L.; investigation, Z.Y.; resources, D.C.; data curation, Y.Z.; writing—original draft preparation, X.D.; writing—review and editing, X.D. and Y.W.; visualization, D.C. and Z.H.; supervision, Y.C. and Y.Z.; project administration, Y.C.; funding acquisition, Y.C. All authors have read and agreed to the published version of the manuscript.
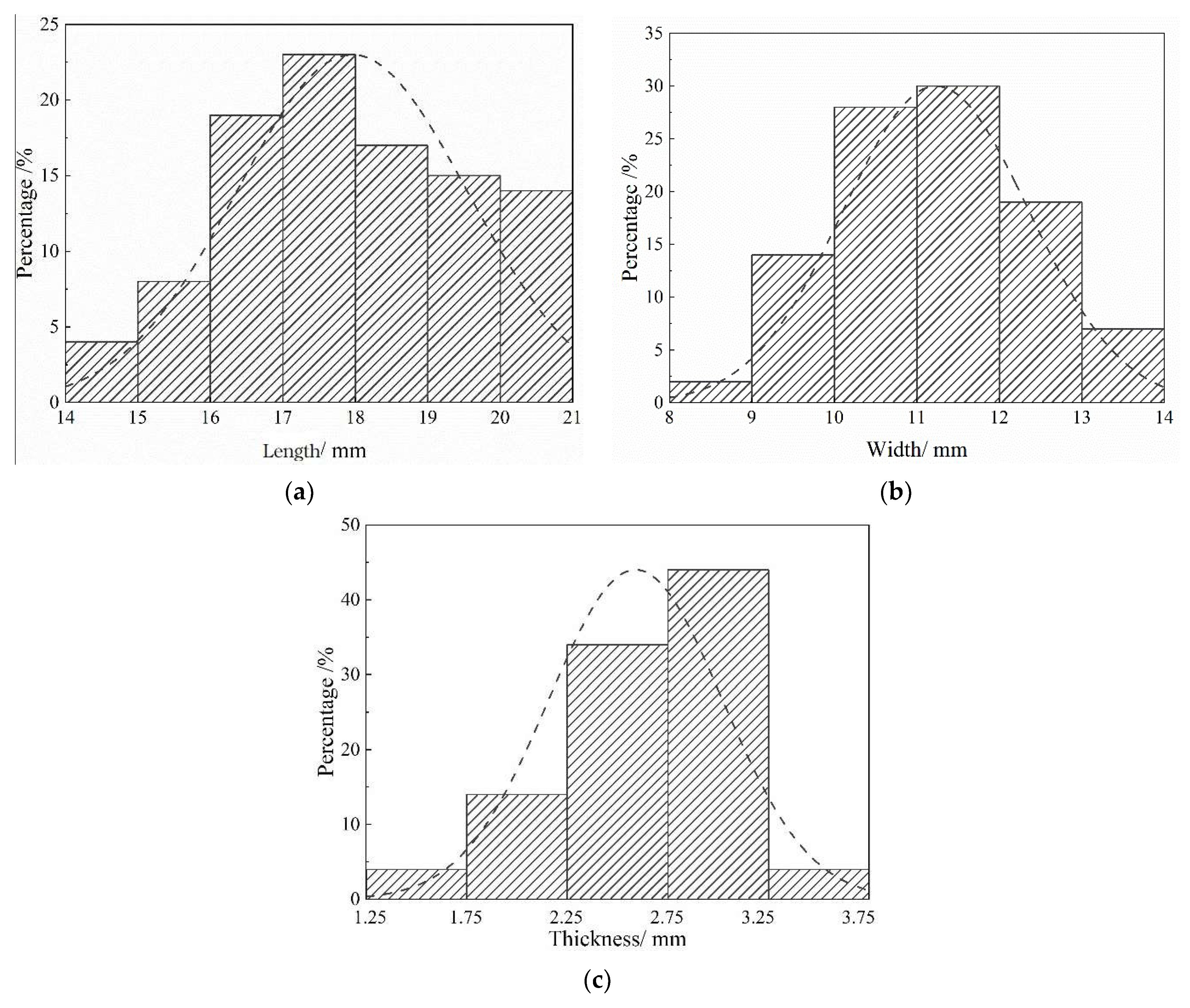
Figure 1.
Dimension distribution of the seeds: (a) length, (b) width, and (c) thickness.
Figure 1.
Dimension distribution of the seeds: (a) length, (b) width, and (c) thickness.
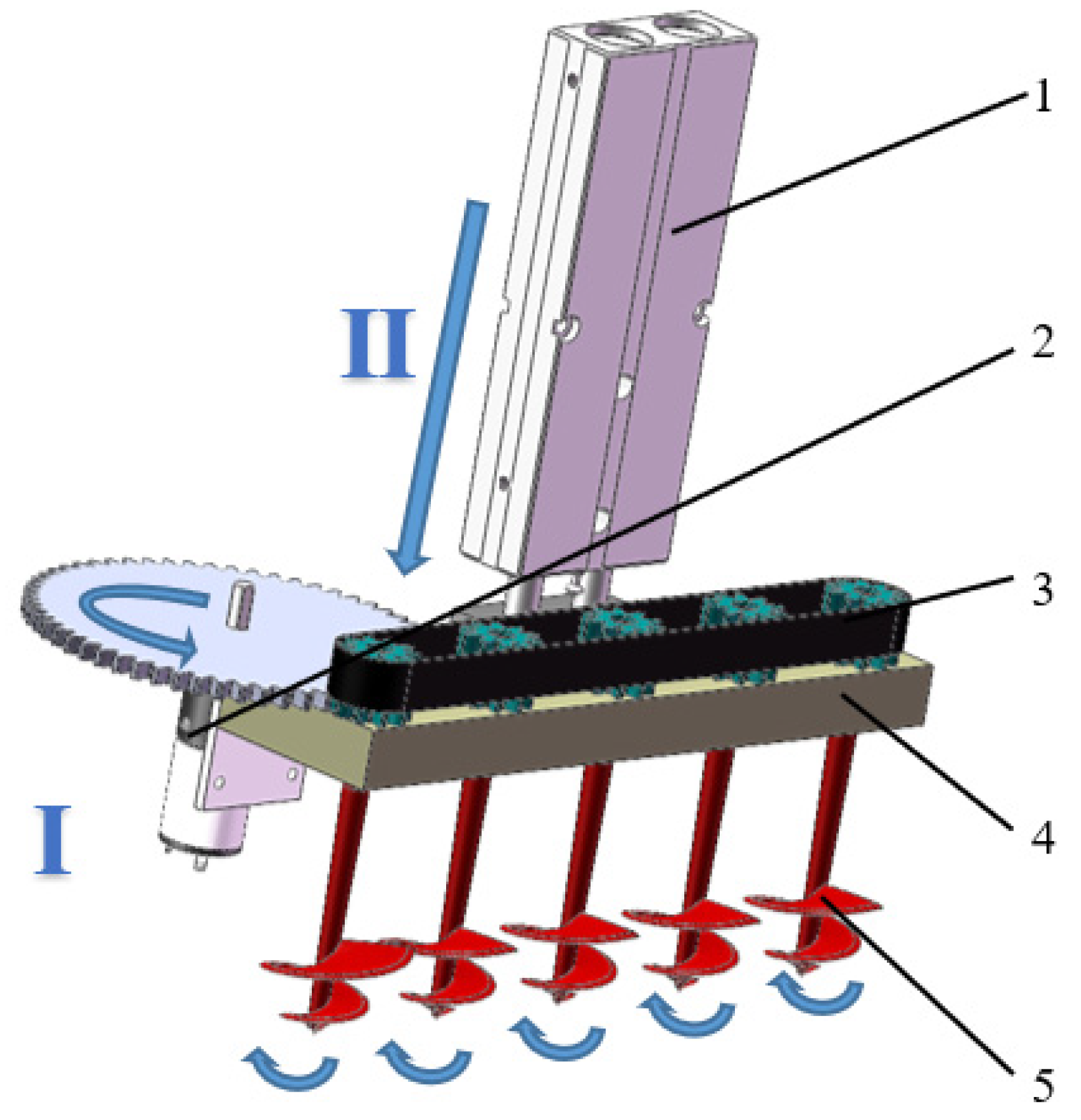
Figure 2.
(I) The gear motor drives the five spiral bits to rotate. (II) The end-effector moves downwards by pushing the cylin-der. Spiral digging end-effector module: 1. cylinder, 2. gear motor, 3. synchronous belt, 4. connecting plate, and 5. spiral bits.
Figure 2.
(I) The gear motor drives the five spiral bits to rotate. (II) The end-effector moves downwards by pushing the cylin-der. Spiral digging end-effector module: 1. cylinder, 2. gear motor, 3. synchronous belt, 4. connecting plate, and 5. spiral bits.
Figure 3.
The main size of drill tip.
Figure 3.
The main size of drill tip.
Figure 4.
Conical spiral line with equal pitch variable pitch. Note: γ is cone top angle, °; D is top diameter of helical blade, mm; H is length of helical blade, mm, and d is bottom diameter of helical blade, mm.
Figure 4.
Conical spiral line with equal pitch variable pitch. Note: γ is cone top angle, °; D is top diameter of helical blade, mm; H is length of helical blade, mm, and d is bottom diameter of helical blade, mm.
Figure 5.
Particle diameter distribution.
Figure 5.
Particle diameter distribution.
Figure 6.
Device components of physical test on the substrate AOR: 1. funnel, 2. substrate, 3. steel plate, and 4. funnel holding device.
Figure 6.
Device components of physical test on the substrate AOR: 1. funnel, 2. substrate, 3. steel plate, and 4. funnel holding device.
Figure 7.
Substrate boundary profile processing: (a) original image, (b) gray processing, (c) binarization, (d) extract contour, and (e) contour pixel coordinates.
Figure 7.
Substrate boundary profile processing: (a) original image, (b) gray processing, (c) binarization, (d) extract contour, and (e) contour pixel coordinates.
Figure 8.
Comparison of simulation test (a) and physical test (b) of parameter calibration.
Figure 8.
Comparison of simulation test (a) and physical test (b) of parameter calibration.
Figure 9.
Digging Performance: 1. substrate, 2. tray.
Figure 9.
Digging Performance: 1. substrate, 2. tray.
Figure 10.
The traditional protrusions penetrating end-effector.
Figure 10.
The traditional protrusions penetrating end-effector.
Figure 11.
The influence of cone angle (a) spiral angle, (b) rotational speed, and (c) on hole digging capability (triangle ▲: cross-section width; square ■: particle overflow percentage; round ●: dig time).
Figure 11.
The influence of cone angle (a) spiral angle, (b) rotational speed, and (c) on hole digging capability (triangle ▲: cross-section width; square ■: particle overflow percentage; round ●: dig time).
Figure 12.
Simulation of hole digging process: 1. spiral bits, 2. substrate particles, 3. plug tray. (a) substrate particles into the plug tray, (b) natural settlement of particles, (c) the spiral bit spun into the substrate particles, (d) the spiral bit rotated for 2.09 s, (e) the spiral blade was lifted up, and (f) a hole was formed.
Figure 12.
Simulation of hole digging process: 1. spiral bits, 2. substrate particles, 3. plug tray. (a) substrate particles into the plug tray, (b) natural settlement of particles, (c) the spiral bit spun into the substrate particles, (d) the spiral bit rotated for 2.09 s, (e) the spiral blade was lifted up, and (f) a hole was formed.
Figure 13.
Spiral digging end-effector photo.
Figure 13.
Spiral digging end-effector photo.
Figure 14.
Comparison of physical test and simulation test on spiral digging: (a) soil profile measurement and (b) contour of the hole.
Figure 14.
Comparison of physical test and simulation test on spiral digging: (a) soil profile measurement and (b) contour of the hole.
Table 1.
Factors and levels table of Plackett–Burman Design.
Table 1.
Factors and levels table of Plackett–Burman Design.
| Factors | Levels |
|---|
| −1 | 0 | 1 |
|---|
| A-Substrate particles shear modulus (MPa) | 2.90 | 6.45 | 10.00 |
| B-Substrate–substrate restitution coefficient | 0.10 | 0.40 | 0.70 |
| C-Substrate–substrate static friction coefficient | 0.30 | 0.73 | 1.16 |
| D-Substrate–substrate rolling friction coefficient | 0.00 | 0.28 | 0.56 |
| E-Substrate–steel restitution coefficient | 0.10 | 0.35 | 0.60 |
| F-Substrate–steel static friction coefficient | 0.20 | 0.40 | 0.60 |
| G-Surface energy (J·m−2) | 0.00 | 0.50 | 1.00 |
| H-Contact plasticity ratio | 0.30 | 0.50 | 0.70 |
| J-Tensile exp. | 1.50 | 3.25 | 5.00 |
| K-Tangential stiff multiplier | 0.05 | 0.525 | 1.00 |
Table 2.
Scheme and results of Plackett–Burman Design.
Table 2.
Scheme and results of Plackett–Burman Design.
| No. | Test Factors | Angle of Repose (°) |
|---|
| A | B | C | D | E | F | G | H | J | K | L |
|---|
| 1 | 1 | 1 | −1 | 1 | 1 | 1 | −1 | −1 | 1 | −1 | −1 | 31.21 |
| 2 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | 1 | 1 | 25.83 |
| 3 | 1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | 1 | 69.41 |
| 4 | −1 | 1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | 1 | 60.96 |
| 5 | −1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | 1 | −1 | −1 | 43.74 |
| 6 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | 39.26 |
| 7 | 1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 40.44 |
| 8 | 1 | 1 | −1 | −1 | −1 | 1 | 1 | 1 | −1 | 1 | −1 | 28.05 |
| 9 | 1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | 1 | −1 | 1 | 19.86 |
| 10 | −1 | 1 | 1 | 1 | −1 | −1 | 1 | −1 | 1 | 1 | −1 | 76.84 |
| 11 | 1 | −1 | 1 | 1 | 1 | −1 | −1 | 1 | −1 | 1 | −1 | 63.88 |
| 12 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | 16.71 |
| 13 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 62.95 |
Table 3.
ANOVA of Plackett–Burman Design test’s result.
Table 3.
ANOVA of Plackett–Burman Design test’s result.
| Source of Variance | Mean Square | df | F-Value | p-Value |
|---|
| Model | 450.44 | 10 | 247.85 | 0.0494 * |
| A | 9.17 | 1 | 5.05 | 0.2666 |
| B | 78.49 | 1 | 43.19 | 0.0961 |
| C | 573.12 | 1 | 315.35 | 0.0358 * |
| D | 2322.14 | 1 | 1277.72 | 0.0178 * |
| E | 21.15 | 1 | 11.64 | 0.1815 |
| F | 141.38 | 1 | 77.79 | 0.0719 |
| G | 1254.40 | 1 | 690.22 | 0.0242 * |
| H | 1.83 | 1 | 1.01 | 0.4986 |
| J | 15.17 | 1 | 8.34 | 0.2122 |
| K | 87.53 | 1 | 48.16 | 0.0911 |
| Residual | 1.82 | 1 | | |
| Cor Total | 4873.00 | 12 | | |
Table 4.
Scheme and results of path of steepest ascent method.
Table 4.
Scheme and results of path of steepest ascent method.
| No. | Test Factors | Angle of Repose (°) | Relative Error (%) |
|---|
| C | D | G |
|---|
| 1 | 0.2 | 0.00 | 0.0 | 25.20 | 35.43 |
| 2 | 0.4 | 0.12 | 0.2 | 46.27 | 18.55 |
| 3 | 0.6 | 0.24 | 0.4 | 51.78 | 32.67 |
| 4 | 0.8 | 0.36 | 0.6 | 57.21 | 46.58 |
| 5 | 1.0 | 0.48 | 0.8 | 61.26 | 56.96 |
| 6 | 1.2 | 0.60 | 1.0 | 67.81 | 73.74 |
Table 5.
Factors and levels table of Central Composite Design.
Table 5.
Factors and levels table of Central Composite Design.
| Levels | C | D | G |
|---|
| −1.682 | 0.0636414 | −0.0818151 | −0.136359 |
| −1 | 0.2 | 0 | 0 |
| 0 | 0.4 | 0.12 | 0.2 |
| 1 | 0.6 | 0.24 | 0.4 |
| 1.682 | 0.736359 | 0.321815 | 0.536359 |
Table 6.
Scheme and results of Central Composite Design.
Table 6.
Scheme and results of Central Composite Design.
| No. | Test Factors | Angle of Repose (°) |
|---|
| C | D | G |
|---|
| 1 | 0 | 0 | 0 | 44.30 |
| 2 | 1 | 1 | 1 | 59.52 |
| 3 | −1 | 1 | −1 | 35.96 |
| 4 | 1.682 | 0 | 0 | 43.55 |
| 5 | 0 | 0 | 1.682 | 51.83 |
| 6 | 0 | −1.682 | 0 | 26.51 |
| 7 | 0 | 0 | 0 | 47.73 |
| 8 | 0 | 0 | 0 | 47.32 |
| 9 | 0 | 0 | 0 | 46.28 |
| 10 | 0 | 1.682 | 0 | 58.04 |
| 11 | 0 | 0 | 0 | 43.52 |
| 12 | −1.682 | 0 | 0 | 26.09 |
| 13 | −1 | 1 | 1 | 47.27 |
| 14 | 1 | −1 | 1 | 34.39 |
| 15 | 0 | 0 | 0 | 42.52 |
| 16 | −1 | −1 | −1 | 27.33 |
| 17 | 0 | 0 | 0 | 44.22 |
| 18 | 1 | 1 | −1 | 54.59 |
| 19 | 0 | 0 | 0 | 41.73 |
| 20 | −1 | −1 | 1 | 39.27 |
| 21 | 0 | 0 | 0 | 45.20 |
| 22 | 0 | 0 | −1.682 | 37.53 |
| 23 | 1 | −1 | −1 | 28.12 |
Table 7.
ANOVA of Central Composite Design quadratic model.
Table 7.
ANOVA of Central Composite Design quadratic model.
| Source of Variance | Sum of Squares | df | Mean Square | F Value | p Value |
|---|
| Model | 1924.35 | 9 | 213.82 | 57.31 | <0.0001 ** |
| C | 230.89 | 1 | 230.89 | 61.89 | <0.0001 ** |
| D | 1076.62 | 1 | 1076.62 | 288.57 | <0.0001 ** |
| G | 250.59 | 1 | 250.59 | 67.17 | <0.0001 ** |
| CD | 152.86 | 1 | 152.86 | 40.97 | <0.0001 ** |
| CG | 18.15 | 1 | 18.15 | 4.86 | 0.0460 * |
| DG | 0.4851 | 1 | 0.4851 | 0.1300 | 0.7242 |
| C2 | 185.48 | 1 | 185.48 | 49.72 | <0.0001 ** |
| D2 | 9.69 | 1 | 9.69 | 2.60 | 0.1311 |
| G2 | 0.0765 | 1 | 0.0765 | 0.0205 | 0.8883 |
| Residual | 48.50 | 13 | 3.73 | | |
| Lack of Fit | 14.38 | 5 | 2.88 | 0.6745 | 0.6548 |
| Pure Error | 34.12 | 8 | 4.26 | | |
| Cor Total | 1972.85 | 22 | | | |
Table 8.
ANOVA of Central Composite Design modified model.
Table 8.
ANOVA of Central Composite Design modified model.
| Source of Variance | Sum of Squares | df | Mean Square | F Value | p Value |
|---|
| Model | 1914.08 | 6 | 319.01 | 86.86 | <0.0001 ** |
| C | 230.89 | 1 | 230.89 | 62.87 | <0.0001 ** |
| D | 1076.62 | 1 | 1076.62 | 293.14 | <0.0001 ** |
| G | 250.59 | 1 | 250.59 | 68.23 | <0.0001 ** |
| CD | 152.86 | 1 | 152.86 | 41.62 | <0.0001 ** |
| CG | 18.15 | 1 | 18.15 | 4.94 | 0.0410 * |
| C2 | 184.97 | 1 | 184.97 | 50.36 | <0.0001 ** |
| Residual | 58.76 | 16 | 3.67 | | |
| Lack of Fit | 24.65 | 8 | 3.08 | 0.7224 | 0.6718 |
| Pure Error | 34.12 | 8 | 4.26 | | |
| Cor Total | 1972.85 | 22 | | | |
Table 9.
Factors and levels of orthogonal test.
Table 9.
Factors and levels of orthogonal test.
| Levels | Test Factors |
|---|
| γ-Cone Angle (°) | α-Spiral Angle (°) | r-Rotational Speed (r·min−1) |
|---|
| 1 | 27.5 | 75 | 180 |
| 2 | 30.0 | 80 | 240 |
| 3 | 32.5 | 85 | 300 |
Table 10.
Results of orthogonal tests.
Table 10.
Results of orthogonal tests.
| No. | γ | α | r | Cross-Section Width (mm) | Particle Overflow Percentage (%) | Dig Time (s) |
|---|
| 1 | 3 | 3 | 1 | 22.6 | 5.22 | 2.68 |
| 2 | 1 | 2 | 3 | 21.7 | 2.88 | 1.48 |
| 3 | 3 | 1 | 3 | 23.0 | 8.30 | 1.62 |
| 4 | 1 | 3 | 2 | 21.5 | 1.33 | 2.18 |
| 5 | 2 | 3 | 3 | 22.6 | 4.04 | 1.60 |
| 6 | 3 | 2 | 2 | 22.8 | 6.96 | 1.94 |
| 7 | 2 | 2 | 1 | 21.6 | 3.68 | 2.54 |
| 8 | 2 | 1 | 2 | 22.1 | 5.46 | 2.16 |
| 9 | 1 | 1 | 1 | 20.9 | 2.31 | 2.62 |
Table 11.
Analysis of variance.
Table 11.
Analysis of variance.
| | Cross-Section Width | Particle Overflow Percentage | Dig Time |
|---|
| γ | α | r | γ | α | r | γ | α | r |
|---|
| III sum of squares | 3.08 | 0.10 | 0.82 | 32.50 | 5.01 | 2.74 | 0.00 | 0.05 | 1.64 |
| df | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Mean square | 1.54 | 0.05 | 0.41 | 16.25 | 2.51 | 1.37 | 0.00 | 0.03 | 0.82 |
| F-value | 198.14 ** | 6.14 | 52.43 * | 2340.22 ** | 360.94 ** | 197.54 ** | 0.10 | 7.66 | 253.25 ** |
Table 12.
Cross-sectional width test results.
Table 12.
Cross-sectional width test results.
| No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|
| Cross-sectional width (mm) | 20.73 | 24.24 | 24.47 | 22.92 | 23.64 | 22.44 | 22.25 | 26.3 | 23.34 | 22.09 |
| Relative error (%) | 10.26 | 4.94 | 5.93 | 0.78 | 2.34 | 2.86 | 3.68 | 13.85 | 1.04 | 4.37 |

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}