
Research on a Map-Based Cooperative Navigation System for Spraying–Dosing Robot Group



 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
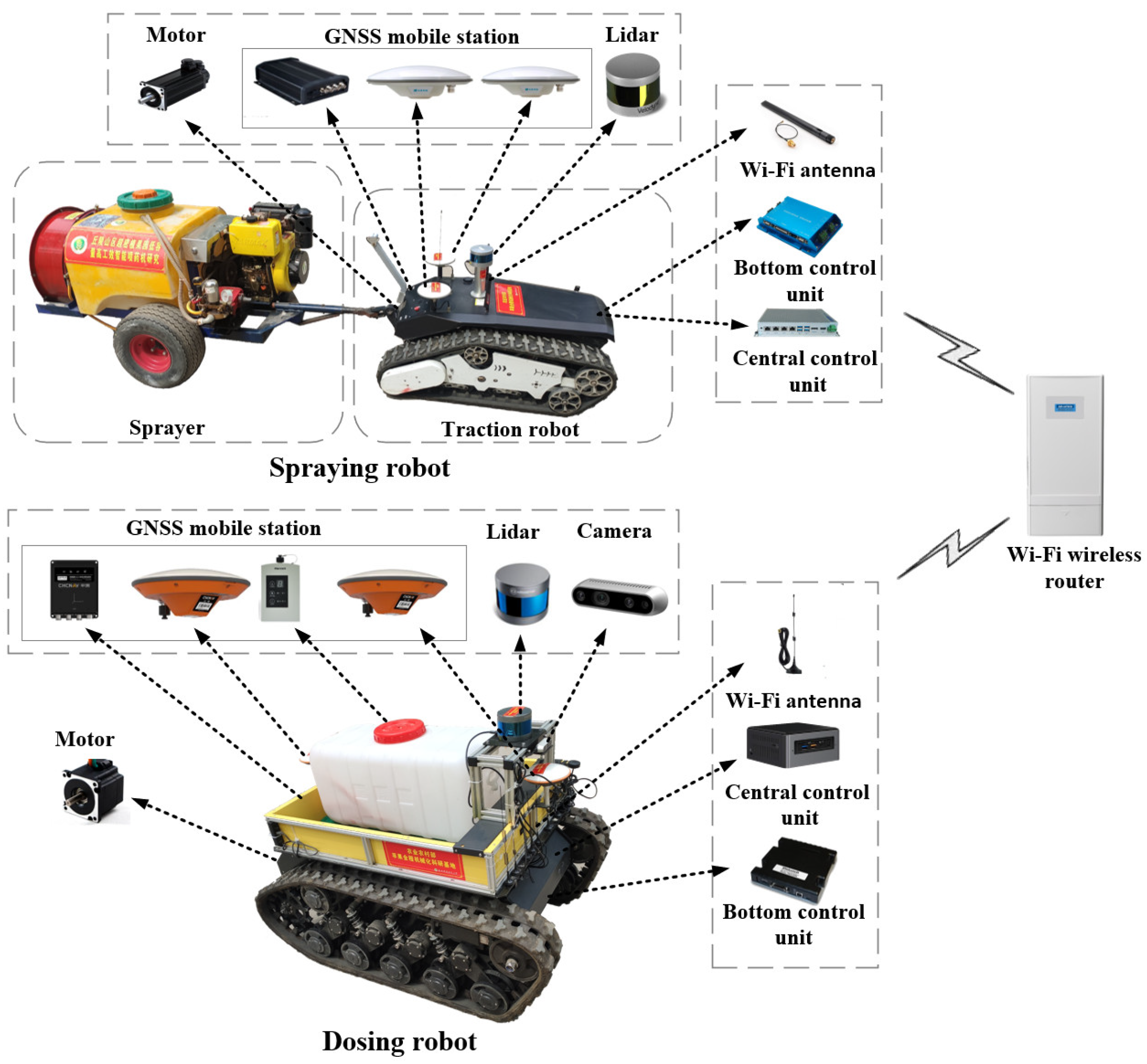
2.1. Structure and Design
2.1.1. Navigation System
2.1.2. Communication System Design
2.2. Map Construction
2.2.1. Feature Classification
2.2.2. Posture Estimation
2.2.3. Map Optimization
2.3. Motion Control
2.3.1. Pure Pursuit Control
2.3.2. D-A Control
2.4. Collaborative Navigation Strategy
3. Results
3.1. Communication Experiment
3.2. Cooperative Navigation Control Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vasconez, J.P.; Kantor, G.A.; Cheein, F.A.A. Human–robot interaction in agriculture, A survey and current challenges. Biosyst. Eng. 2019, 179, 35–48. [Google Scholar] [CrossRef]
- Vásconez, J.P.; Cheein, F.A.A. Workload and production assessment in the avocado harvesting process using human-robot collaborative strategies. Biosyst. Eng. 2022, 223, 56–77. [Google Scholar] [CrossRef]
- Vasconez, J.P.; Guevara, L.; Cheein, F.A. Social robot navigation based on HRI non-verbal communication: A case study on avocado harvesting. In Proceedings of the 34th ACM/SIGAPP Symposium on Applied Computing, Limassol, Cyprus, 8–12 April 2019; pp. 957–960. [Google Scholar]
- Tourrette, T.; Deremetz, M.; Naud, O.; Lenain, R.; Laneurit, J.; De Rudnicki, V. Close coordination of mobile robots using radio beacons, A new concept aimed at smart spraying in agriculture. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 7727–7734. [Google Scholar]
- National Bureau of Statistics of China. China Statistical Yearbook; National Bureau of Statistics of China: Beijing, China, 2021.
- Zheng, Y.; Jiang, S.; Chen, B.; Lü, H.; Wan, C.; Kang, F. Review on technology and equipment of mechanization in hilly orchard. Trans. Chin. Soc. Agric. 2020, 51, 1–20. [Google Scholar]
- Liu, Z.; Wang, X.; Ren, Z.; Mao, W.; Yang, F. Crawler tractor navigation path tracking control algorithm based on virtual radarmodel. Trans. Chin. Soc. Agric. Mach. 2021, 52, 375–385. [Google Scholar]
- Gu, C.; Wang, X.; Wang, X.; Yang, F.; Zhai, C. Research progress on variable-rate spraying technology in orchards. Appl. Eng. Agric. 2020, 36, 927–942. [Google Scholar] [CrossRef]
- Zhai, C.Y.; Zhao, C.J.; Ning, W.; John, L.; Wang, X.; Paul, W.; Zhang, H.H. Research progress on precision control methods of air-assisted spraying in orchards. Trans. Chin. Soc. Agric. Eng. 2018, 34, 1–15. [Google Scholar]
- Liu, L.; Liu, Y.; He, X.; Liu, W. Precision Variable-Rate Spraying Robot by Using Single 3D LIDAR in Orchards. Agronomy 2022, 12, 2509. [Google Scholar] [CrossRef]
- Jo, K.; Lee, J.; Kim, J. Cooperative multi-robot localization using differential position data. In Proceedings of the 2007 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Zurich, Switzerland, 4–7 September 2007. [Google Scholar]
- Mueller-Sim, T.; Jenkins, M.; Abel, J.; Kantor, G. The Robotanist, A Ground-based Agricultural Robot for High-throughput Crop Phenotyping. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3634–3639. [Google Scholar]
- Zhang, L.; Zhu, X.; Huang, J.; Huang, J.; Xie, J.; Xiao, X.; Yin, G.; Wang, X.; Li, M.; Fang, K. BDS/IMU Integrated Auto-Navigation System of Orchard Spraying Robot. Appl. Sci. 2022, 12, 8173. [Google Scholar] [CrossRef]
- Xu, A.; Cao, N.; Sui, X.; Wang, C.; Gao, S. Cooperative vehicle positioning method based on BDS/UWB. Sci. Surv. Mapp. 2020, 45, 1–8. [Google Scholar]
- Li, M.; Imou, K.; Wakabayashi, K.; Yokoyama, S. Review of research on agricultural vehicle autonomous guidance. Int. J. Agric. Biol. Eng. 2009, 2, 1–16. [Google Scholar]
- Radcliffe, J.; Cox, J.; Bulanon, D.M. Machine vision for orchard navigation. Comput. Ind. 2018, 98, 165–171. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, C.; Gao, Z.; Sugirbay, A.; Chen, J.; Chen, Y. Research on 2D Laser Automatic Navigation Control for Standardized Orchard. Appl. Sci. 2020, 10, 2763. [Google Scholar] [CrossRef]
- Zhang, M.; Ji, Y.; Li, S.; Cao, R.; Xu, H.; Zhan, Z. Research Progress of Agricultural Machinery Navigation Technology. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–18. [Google Scholar]
- Yan, C.; Xu, L.; Yuan, Q.; Ma, S.; Niu, C.; Zhao, S. Design and experiments of vineyard variable spraying control system based on binocular vision. Trans. Chin. Soc. Agric. Eng. 2021, 37, 13–22. [Google Scholar]
- Liu, W.; He, X.; Liu, Y.; Wu, Z.; Yuan, C.; Liu, L.; Qi, P.; Li, T. Navigation method between rows for orchard based on 3D LiDAR. Trans. Chin. Soc. Agric. Eng. 2021, 37, 165–174. [Google Scholar]
- Santos, L.C.; Aguiar, A.S.; Santos, F.N.; Valente, A.; Ventura, J.B.; Sousa, A.J. Navigation Stack for Robots Working in Steep Slope Vineyard. In Advances. in Intelligent Systems and Computing, Proceedings of the Intelligent Systems and Applications, London, UK, 3–4 September 2020; Arai, K., Kapoor, S., Bhatia, Eds.; Springer: Cham, Switzerland, 2021; Volume 1250, p. 1250. [Google Scholar]
- Xue, X.; Xu, X.; Li, Z.; Hong, T.; Xie, J.; Chen, J.; Song, S. Design and test of variable spray model based on leaf wall area in orchards. Trans. Chin. Soc. Agric. Eng. 2020, 36, 16–22. [Google Scholar]
- Cheein, F.A.; Steiner, G.; Paina, G.P.; Carelli, R. Optimized EIF-SLAM algorithm for precision agriculture mapping based on stems detection. Comput. Electron. Agric. 2011, 78, 195–207. [Google Scholar] [CrossRef]
- Gimenez, J.; Herrera, D.; Tosetti, S.; Carelli, R. Optimization methodology to fruit grove mapping in precision agriculture. Comput. Electron. Agric. 2015, 116, 88–100. [Google Scholar] [CrossRef]
- Shalal, N.; Low, T.; McCarthy, C.; Hancock, N. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion—Part A, Tree detection. Comput. Electron. Agric. 2015, 119, 254–266. [Google Scholar] [CrossRef]
- Mao, W.; Liu, H.; Wang, D.; Yang, F.; Liu, Z. An Improved AODV Routing Protocol for Multi-Robot Communication in Orchard. Smart Agric. 2021, 3, 96. [Google Scholar]
- Mao, W.; Liu, Z.; Liu, H.; Yang, F.; Wang, M. Research Progress on Synergistic Technologies of Agricultural Multi-Robots. Appl. Sci. 2021, 11, 1448. [Google Scholar] [CrossRef]
- Mao, W.; Liu, H.; Hao, W.; Yang, F.; Liu, Z. Development of a Combined Orchard Harvesting Robot Navigation System. Remote Sens. 2022, 14, 675. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, H.; Mao, W.; Yang, F.; Wang, W.; Qin, J. Research on Wireless Signal Propagation Characteristics of Traditional Apple Orchard for Multi-robot. Trans. Chin. Soc. Agric. Mach. 2022, 53, 283–293. [Google Scholar]
- Zhou, Z.; Cao, J.; Di, S. Overview of 3D Lidar SLAM algorithms. Chin. J. Sci. Instrum. 2021, 42, 13–27. [Google Scholar]
- Shan, T.; Englot, B. Lego-loam, Lightweight and ground-optimized lidar odometry and mapping on variable terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping. In Proceedings of the 2020 IEEE/RSJ international conference on intelligent robots and systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 5135–5142. [Google Scholar]
- Chai, S.; Yao, L.; Xu, L.; Chen, Q.; Xu, T.; Yang, Y. Research on greenhouse agricultural machinery path tracking based on dynamic look ahead distance pure pursuit model. J. Chin. Agric. Mech. 2021, 42, 58–64. [Google Scholar]
- Mao, W.; Liu, H.; Wang, X.; Yang, F.; Liu, Z.; Wang, Z. Design and experiment of a dual navigation mode orchard transport robot. Trans. Chin. Soc. Agric. Mach. 2022, 53, 27–39. [Google Scholar]
- Zhou, J.; He, Y. Research Progress on Navigation Path Planning of Agricultural Machinery. Trans. Chin. Soc. Agric. Mach. 2021, 52, 1–14. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Distance/m | Group Number | Received Packets/PCS | Packet Loss/% | Average Packet Loss/% |
|---|---|---|---|---|---|
| A | 84.4 | 1 | 494 | 1.2 | 1.7 |
| 2 | 490 | 2 | |||
| 3 | 491 | 1.8 | |||
| B | 88.1 | 1 | 491 | 1.8 | 2.1 |
| 2 | 488 | 2.4 | |||
| 3 | 489 | 2.2 | |||
| C | 91.3 | 1 | 485 | 3.0 | 3.4 |
| 2 | 483 | 3.4 | |||
| 3 | 481 | 3.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, J.; Wang, W.; Mao, W.; Yuan, M.; Liu, H.; Ren, Z.; Shi, S.; Yang, F. Research on a Map-Based Cooperative Navigation System for Spraying–Dosing Robot Group. Agronomy 2022, 12, 3114. https://doi.org/10.3390/agronomy12123114
Qin J, Wang W, Mao W, Yuan M, Liu H, Ren Z, Shi S, Yang F. Research on a Map-Based Cooperative Navigation System for Spraying–Dosing Robot Group. Agronomy. 2022; 12(12):3114. https://doi.org/10.3390/agronomy12123114
Chicago/Turabian StyleQin, Jifeng, Wang Wang, Wenju Mao, Minxin Yuan, Heng Liu, Zhigang Ren, Shuaiqi Shi, and Fuzeng Yang. 2022. "Research on a Map-Based Cooperative Navigation System for Spraying–Dosing Robot Group" Agronomy 12, no. 12: 3114. https://doi.org/10.3390/agronomy12123114
APA StyleQin, J., Wang, W., Mao, W., Yuan, M., Liu, H., Ren, Z., Shi, S., & Yang, F. (2022). Research on a Map-Based Cooperative Navigation System for Spraying–Dosing Robot Group. Agronomy, 12(12), 3114. https://doi.org/10.3390/agronomy12123114