
Developing a Realistic Simulation Environment for Robotics Harvesting Operations in a Vegetable Greenhouse

 ,
,  ,
,
Abstract
:1. Introduction
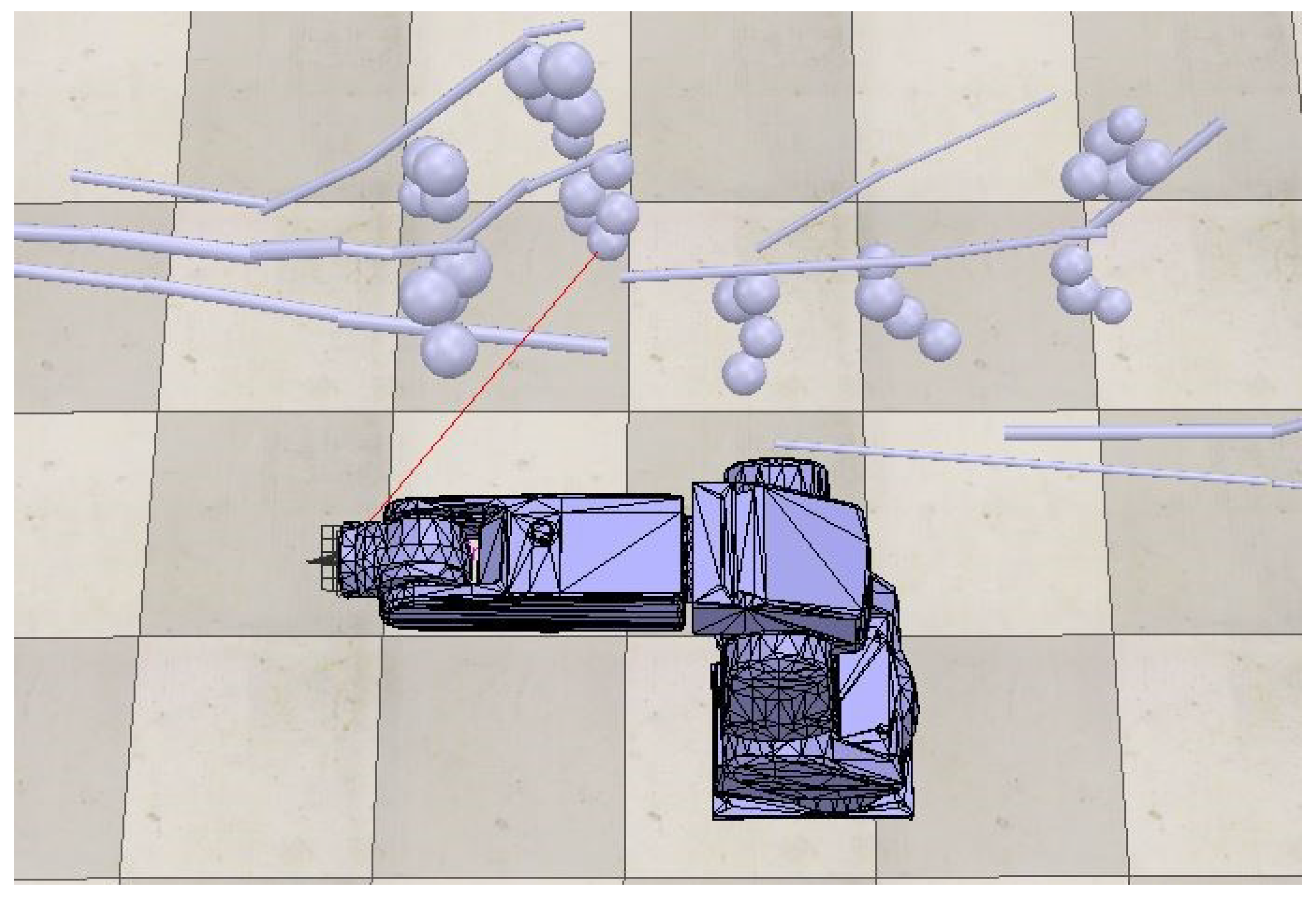
- Present a method to create a realistic simulation of vegetable greenhouse environments that include various obstacles and clutter. The method integrates real-world data into a physics-based robotics simulation software.
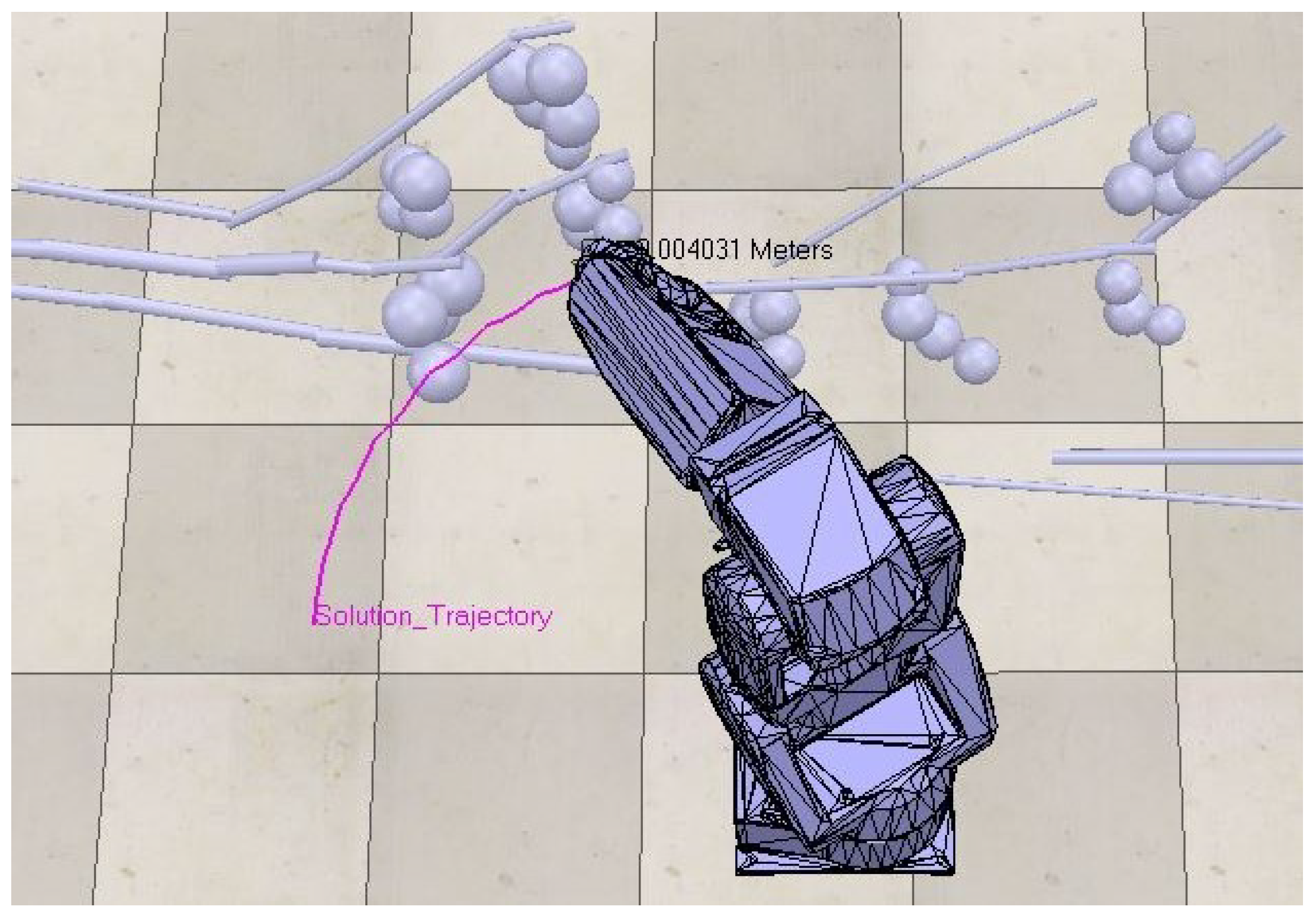
- Demonstrate how to use this environment to test robotics harvesting operations.
2. Materials and Methods
2.1. Robotics Simulation Platform
2.2. Three-Dimensional Mapping of a Vegetable Greenhouse
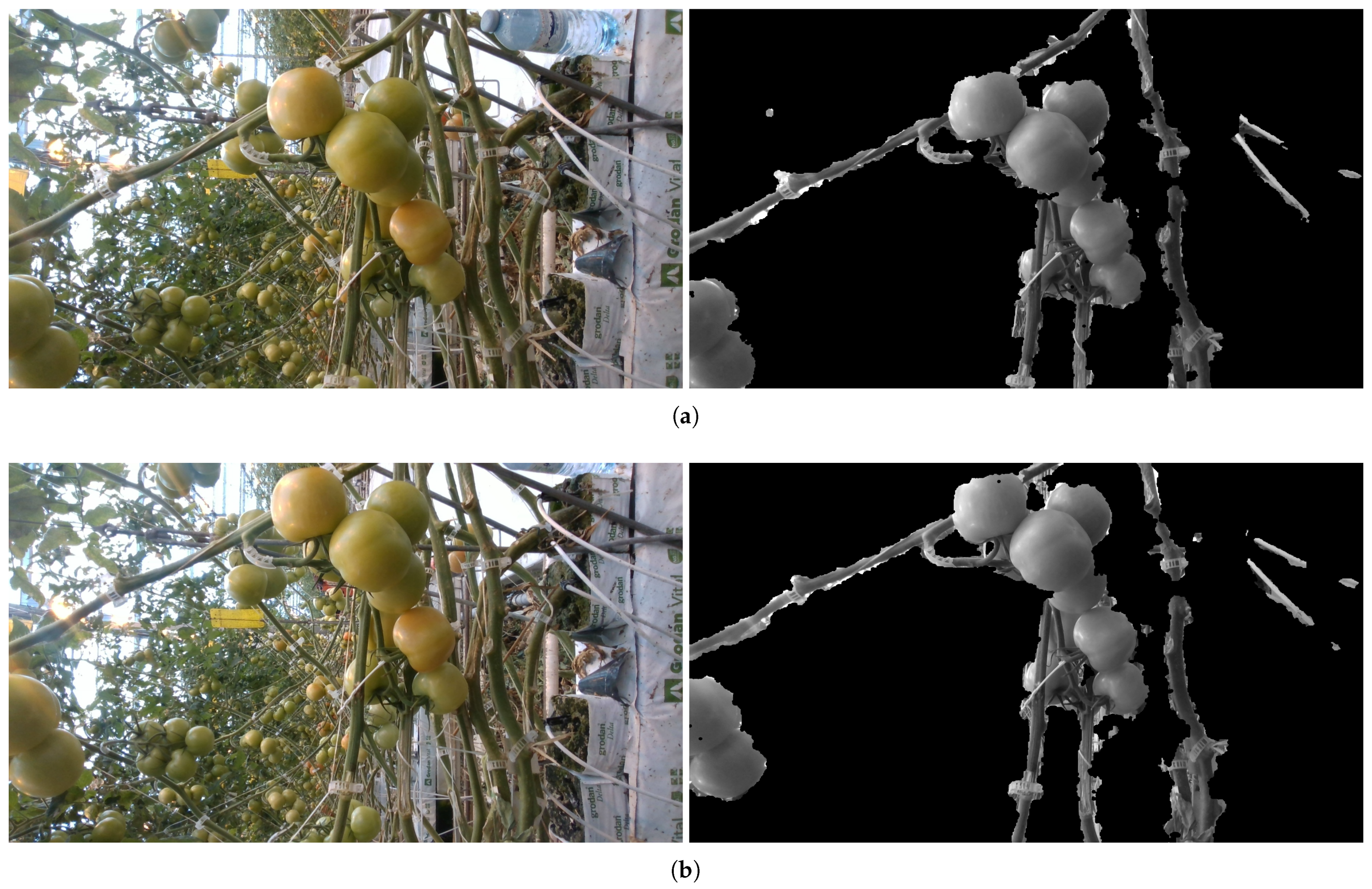
2.2.1. RGB-D Image Capture System
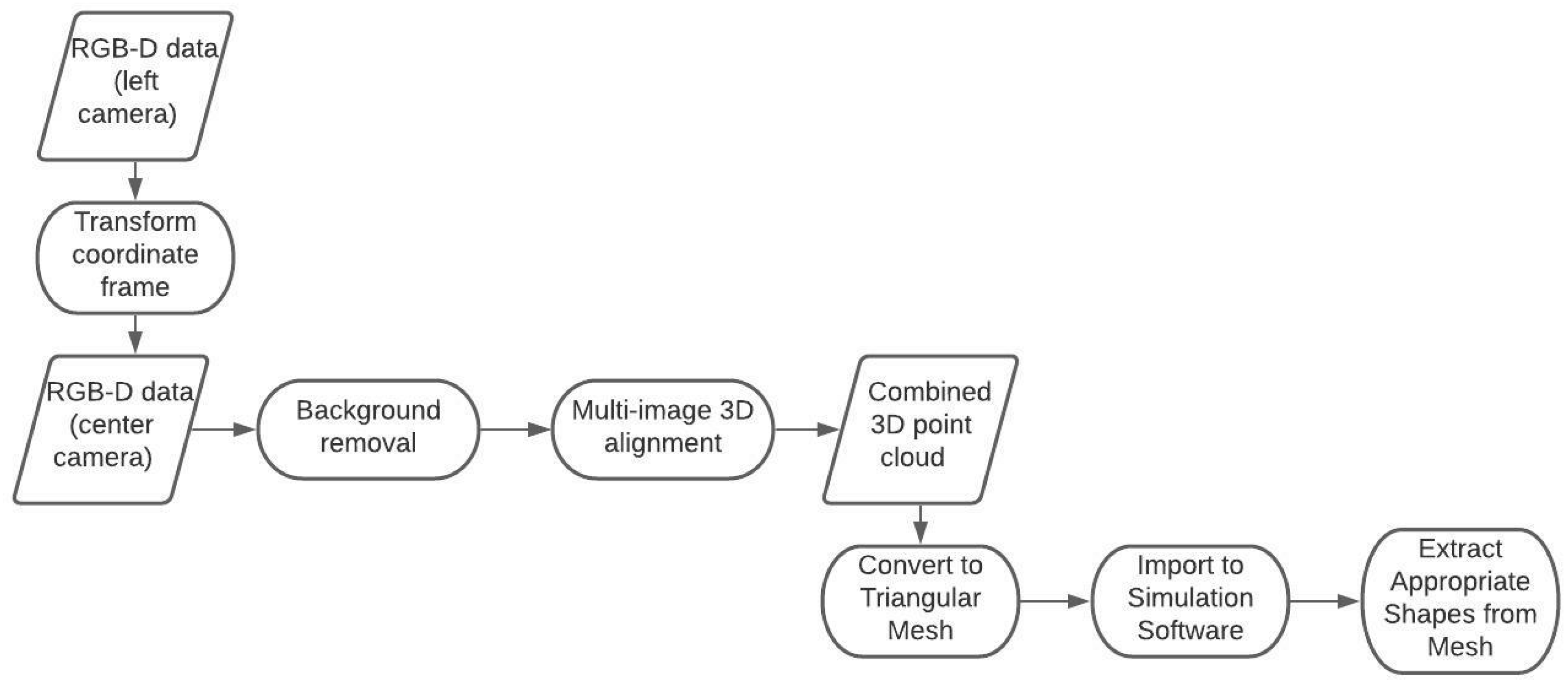
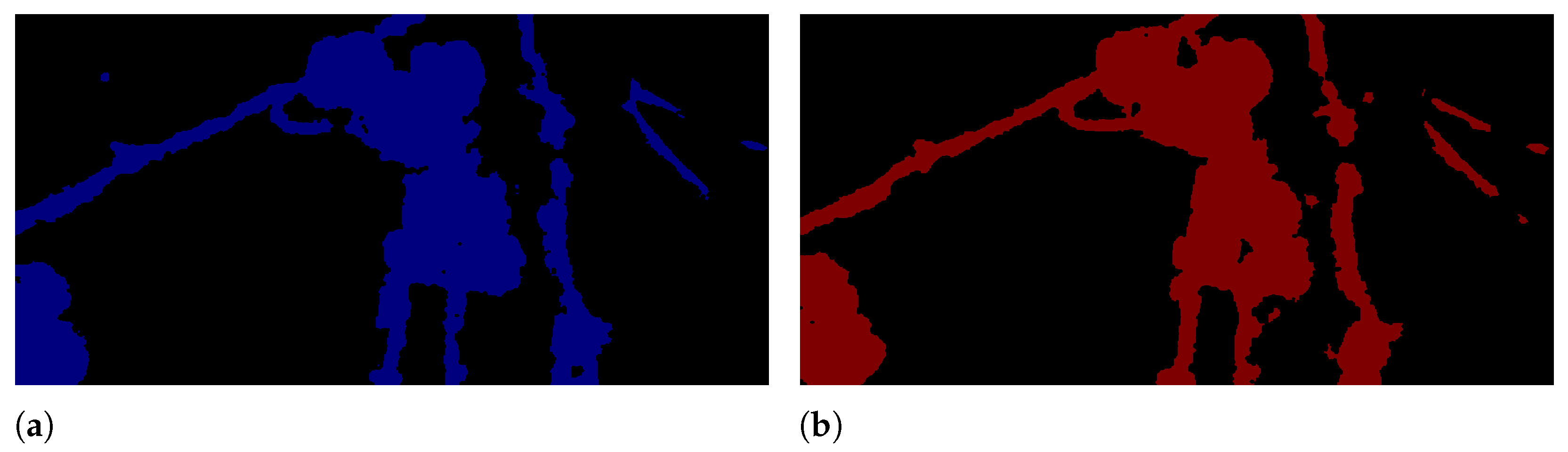
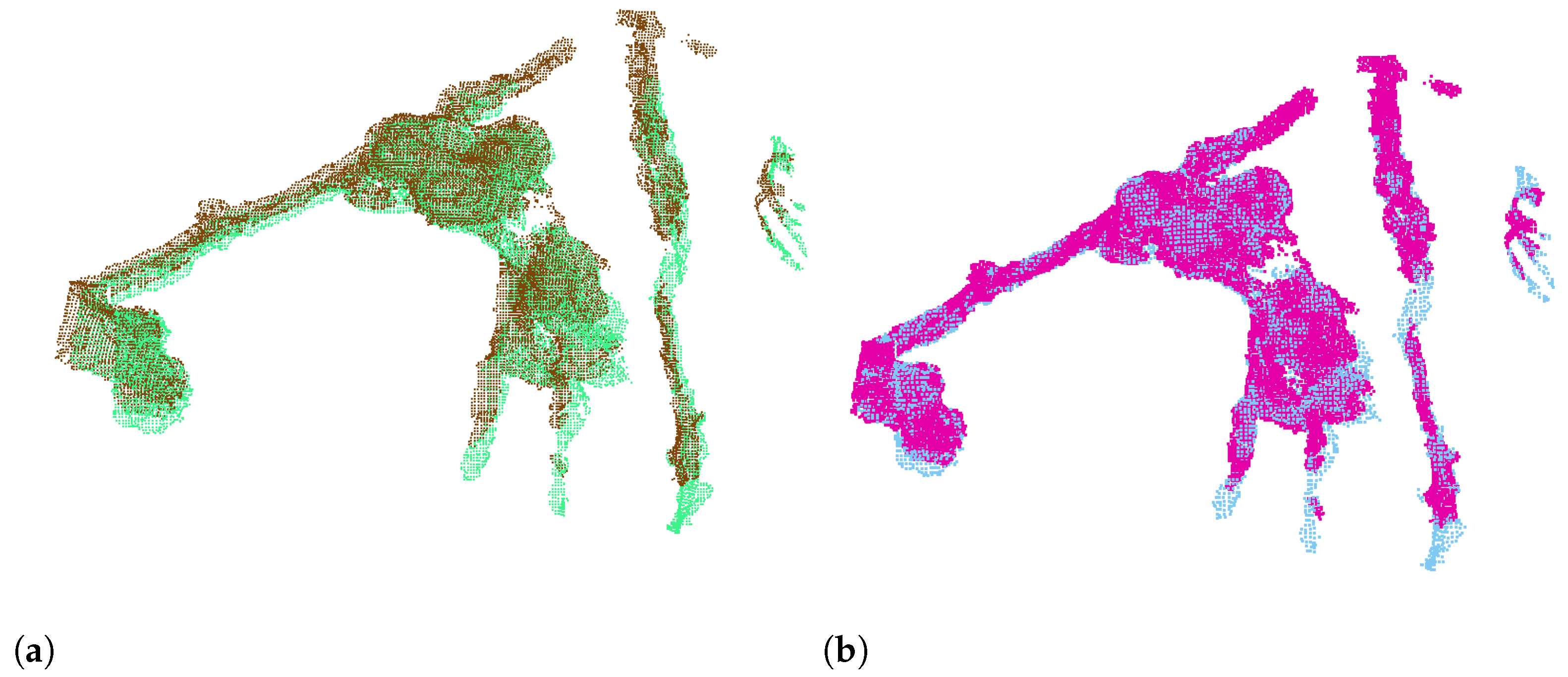
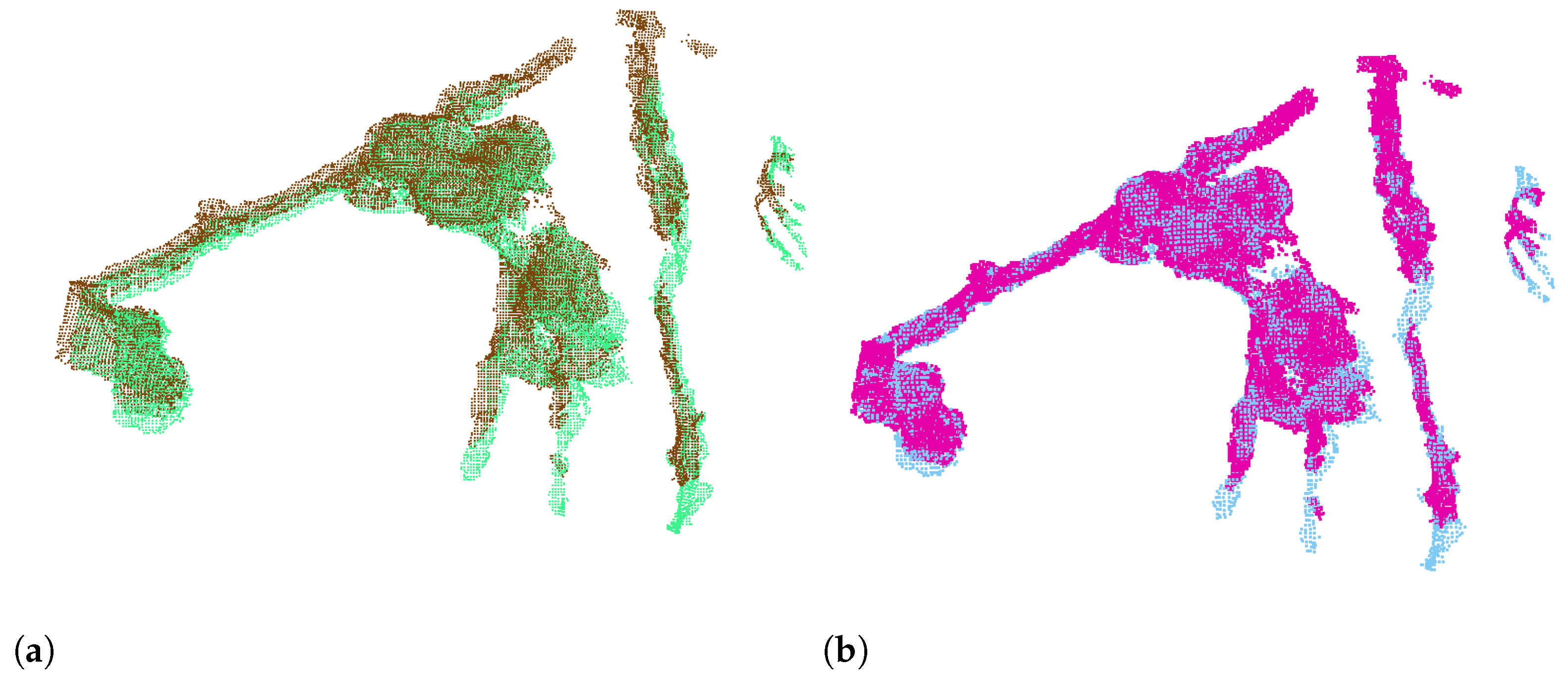
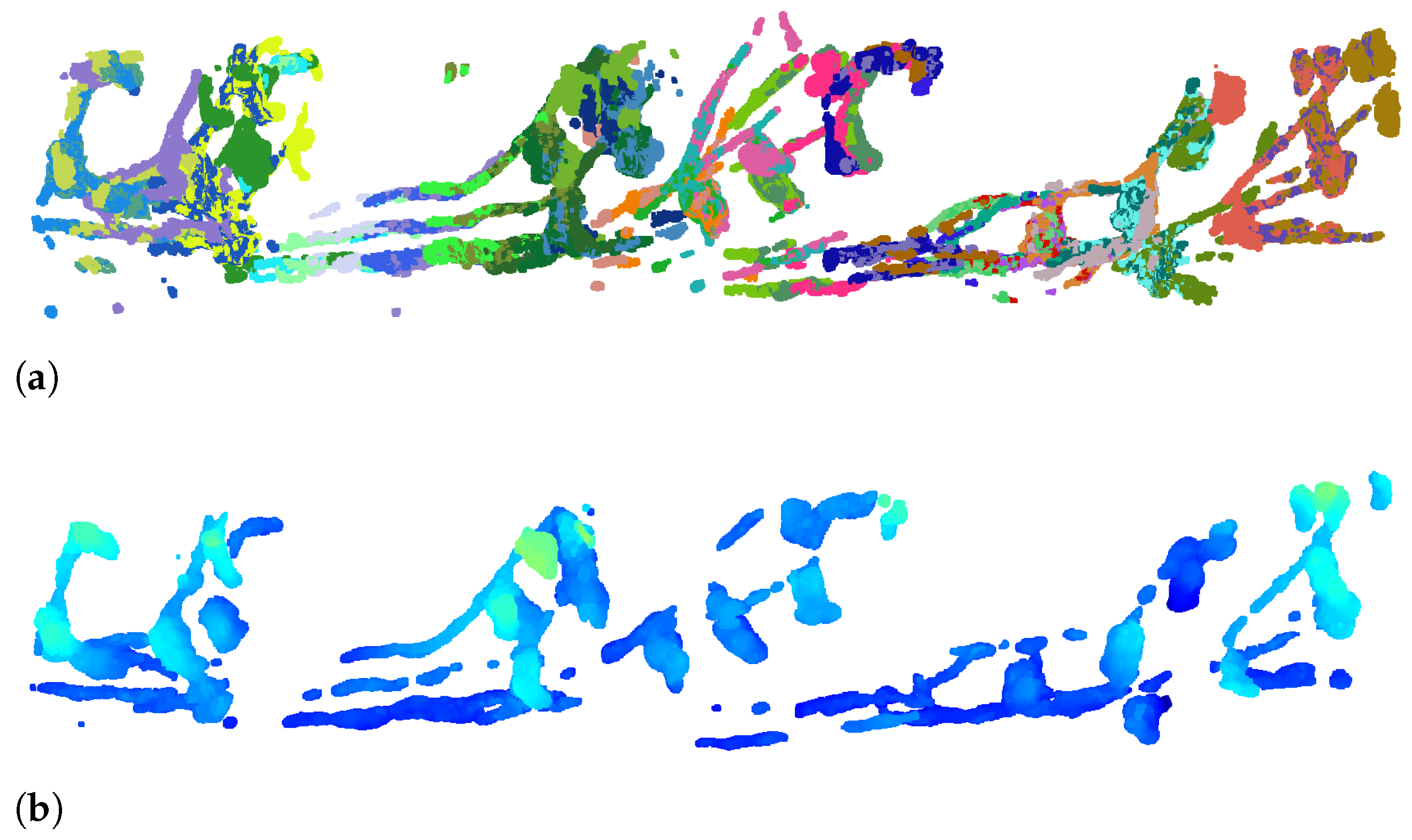
2.2.2. RGB-D Image Processing
2.3. Simulation Environment
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Statistics Canada, Government of Canada. Area, Production and Farm Gate Value of Marketed Vegetables. February 2021. Available online: https://www150.statcan.gc.ca/t1/tbl1/en/tv.action?pid=3210036501 (accessed on 3 March 2021).
- Reuters, K.J. Canada’s Greenhouse Labour Shortage Worsens as Cannabis Growers Snap up Workers. July 2019. Available online: https://www.huffingtonpost.ca/entry/greenhouse-jobs-canada_ca_5d40567ce4b0d24cde064d6f (accessed on 3 March 2021).
- Carpin, S. Randomized motion planning: A tutorial. Int. J. Robot. Autom. 2006, 21. [Google Scholar] [CrossRef] [Green Version]
- Hwang, Y.K.; Ahuja, N. A potential field approach to path planning. IEEE Trans. Robot. Autom. 1992, 8, 23–32. [Google Scholar] [CrossRef] [Green Version]
- Cohen, B.J.; Chitta, S.; Likhachev, M. Search-based planning for manipulation with motion primitives. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2902–2908. [Google Scholar]
- Ratliff, N.; Zucker, M.; Bagnell, J.A.; Srinivasa, S. CHOMP: Gradient optimization techniques for efficient motion planning. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 489–494. [Google Scholar]
- Kavraki, L.; Latombe, J.-C. (18) (PDF) probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef] [Green Version]
- Lavalle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning, Report No. TR 98-11, Computer Science Department, Iowa State University. Available online: http://janowiec.cs.iastate.edu/papers/rrt.ps (accessed on 27 August 2021).
- Sucan, I.; Kavraki, L. (15) (PDF) kinodynamic motion planning by interior-exterior cell exploration. In Proceedings of the Algorithmic Foundation of Robotics VIII, Selected Contributions of the Eight International Workshop on the Algorithmic Foundations of Robotics, WAFR 2008, Guanajuato, Mexico, 7–9 December 2008. [Google Scholar]
- Ladd, A.M.; Kavraki, L.E. Motion planning in the presence of drift, underactuation and discrete system changes. In Proceedings of the 2005 Robotics: Science and Systems I, Massachusetts Institute of Technology, Cambridge, MS, USA, 8–11 June 2005. [Google Scholar]
- Sanchez-Ante, G.; Latombe, J.-C. (14) (PDF) a Single-Query Bi-Directional Probabilistic Roadmap Planner with Lazy Collision Checking. In International Symposium Robotics Research; Springer: Berlin, Germany, 2000. [Google Scholar]
- Latombe, J.-C. Motion Planning: A Journey of Robots, Molecules, Digital Actors, and Other Artifacts; SAGE Publications Ltd. STM: Thousand Oaks, CA, USA, 1999; Volume 18, pp. 1119–1128. [Google Scholar]
- Bontsema, J.; Best, S.; Baur, J.; Ringdahl, O.; Oberti, R.; Evain, S.; Debilde, B.; Ulbrich, H.; Hellström, T.; Hočevar, M.; et al. CROPS: Clever Robots for Crops. Eng. Technol. Ref. 2015, 1. [Google Scholar] [CrossRef]
- Nguyen, T.; Kayacan, E.; De Baedemaeker, J.; Saeys, W. Task and Motion Planning for Apple Harvesting Robot. In Proceedings of the Conference on Modelling and Control in Agriculture, Espoo, Finland, 27–30 August 2013. [Google Scholar]
- Shamshiri, R.R.; Hameed, I.A.; Pitonakova, L.; Weltzien, C.; Balasundram, S.K.; Yule, I.J.; Grift, T.E.; Chowdhary, G. Simulation software and virtual environments for acceleration of agricultural robotics: Features highlights and performance comparison. Int. J. Agric. Biolical Eng. 2018, 11, 15–31. [Google Scholar] [CrossRef]
- Shamshiri, R.R.; Hameed, I.A.; Weltzien, M.K.A.C. Robotic harvesting of fruiting vegetables: A simulation approach in v-REP, ROS and MATLAB. In Automation in Agriculture—Securing Food Supplies for Future Generations; InTechOpen: London, UK, 2018. [Google Scholar]
- Tran, T.; Becker, A.; Grzechca, D. Environment Mapping Using Sensor Fusion of 2D Laser Scanner and 3D Ultrasonic Sensor for a Real Mobile Robot. Sensors 2021, 21, 3184. [Google Scholar] [CrossRef] [PubMed]
- Pitonakova, L.; Giuliani, M.; Pipe, A.; Winfield, A. Feature and performance comparison of the v-REP, gazebo and ARGoS robot simulators. In Towards Autonomous Robotic Systems; Giuliani, M., Assaf, T., Giannaccini, M.E., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 357–368. [Google Scholar]
- Bradski, G. The OpenCV Library. Dr. Dobb’s J. Softw. Tools 2000, 120, 122–125. [Google Scholar]
- Zhou, Q.Y.; Park, J.; Koltun, V. Open3D: A Modern Library for 3D Data Processing. arXiv 2018, arXiv:1801.09847. [Google Scholar]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vision 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Coppelia Robotics. CoppeliaSim. Available online: coppeliarobotics.com (accessed on 27 August 2021).
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiane, M.; Ganovelli, F.; Ranzuglia, G. MeshLab: An Open-Source Mesh Processing Tool. Italian Chapter Conference. 2008. Available online: http://dx.doi.org/10.2312/LocalChapterEvents/ItalChap/ItalianChapConf2008/129-136 (accessed on 27 August 2021).
- Devaurs, D.; Simeon, T.; Cortes, J. Enhancing the transition-based RRT to deal with complex cost spaces. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4120–4125. [Google Scholar]
- Hsu, D.; Latombe, J.; Motwani, R. Path planning in expansive configuration spaces. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 20–25 April 1997; Volume 3, pp. 2719–2726. [Google Scholar]
- Hauser, K. Lazy collision checking in asymptotically-optimal motion planning. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Washington State Convention Center, Seattle, WA, USA, 25–30 May 2015; pp. 2951–2957. [Google Scholar]
- Wspanialy, P.; Moussa, M. A detection and severity estimation system for generic diseases of tomato greenhouse plants. Comput. Electron. Agric. 2020, 178, 105701. [Google Scholar] [CrossRef]
- Van De Walker, B.; Moussa, M. Evaluation of robotic grasp planning approaches for picking operations in a vegetable greenhouse. In Proceedings of the European Conference on Mobile Robots 2021 Workshop on Agricultural Robotics and Automation, Poster Presentation, Bonn, Germany, 31 August–3 September 2021. [Google Scholar]
- Benos, L.; Bechar, A.; Bochtis, D. Safety and ergonomics in human-robot interactive agricultural operations. Biosyst. Eng. 2020, 8, 55–72. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van De Walker, B.; Byrne, B.; Near, J.; Purdie, B.; Whatman, M.; Weales, D.; Tarry, C.; Moussa, M. Developing a Realistic Simulation Environment for Robotics Harvesting Operations in a Vegetable Greenhouse. Agronomy 2021, 11, 1848. https://doi.org/10.3390/agronomy11091848
Van De Walker B, Byrne B, Near J, Purdie B, Whatman M, Weales D, Tarry C, Moussa M. Developing a Realistic Simulation Environment for Robotics Harvesting Operations in a Vegetable Greenhouse. Agronomy. 2021; 11(9):1848. https://doi.org/10.3390/agronomy11091848
Chicago/Turabian StyleVan De Walker, Brent, Brendan Byrne, Joshua Near, Blake Purdie, Matthew Whatman, David Weales, Cole Tarry, and Medhat Moussa. 2021. "Developing a Realistic Simulation Environment for Robotics Harvesting Operations in a Vegetable Greenhouse" Agronomy 11, no. 9: 1848. https://doi.org/10.3390/agronomy11091848
APA StyleVan De Walker, B., Byrne, B., Near, J., Purdie, B., Whatman, M., Weales, D., Tarry, C., & Moussa, M. (2021). Developing a Realistic Simulation Environment for Robotics Harvesting Operations in a Vegetable Greenhouse. Agronomy, 11(9), 1848. https://doi.org/10.3390/agronomy11091848