
Impact of Leaf Occlusions on Yield Assessment by Computer Vision in Commercial Vineyards


 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Layout
2.2. Assessment of Yield Components and Occlusion Rate
2.3. Image Acquisition and Processing
2.4. Leaf Occlusion Rate and Canopy Features by Image Analysis
2.5. Statistical Analysis
3. Results and Discussion
3.1. Yield Components
3.2. Canopy Status
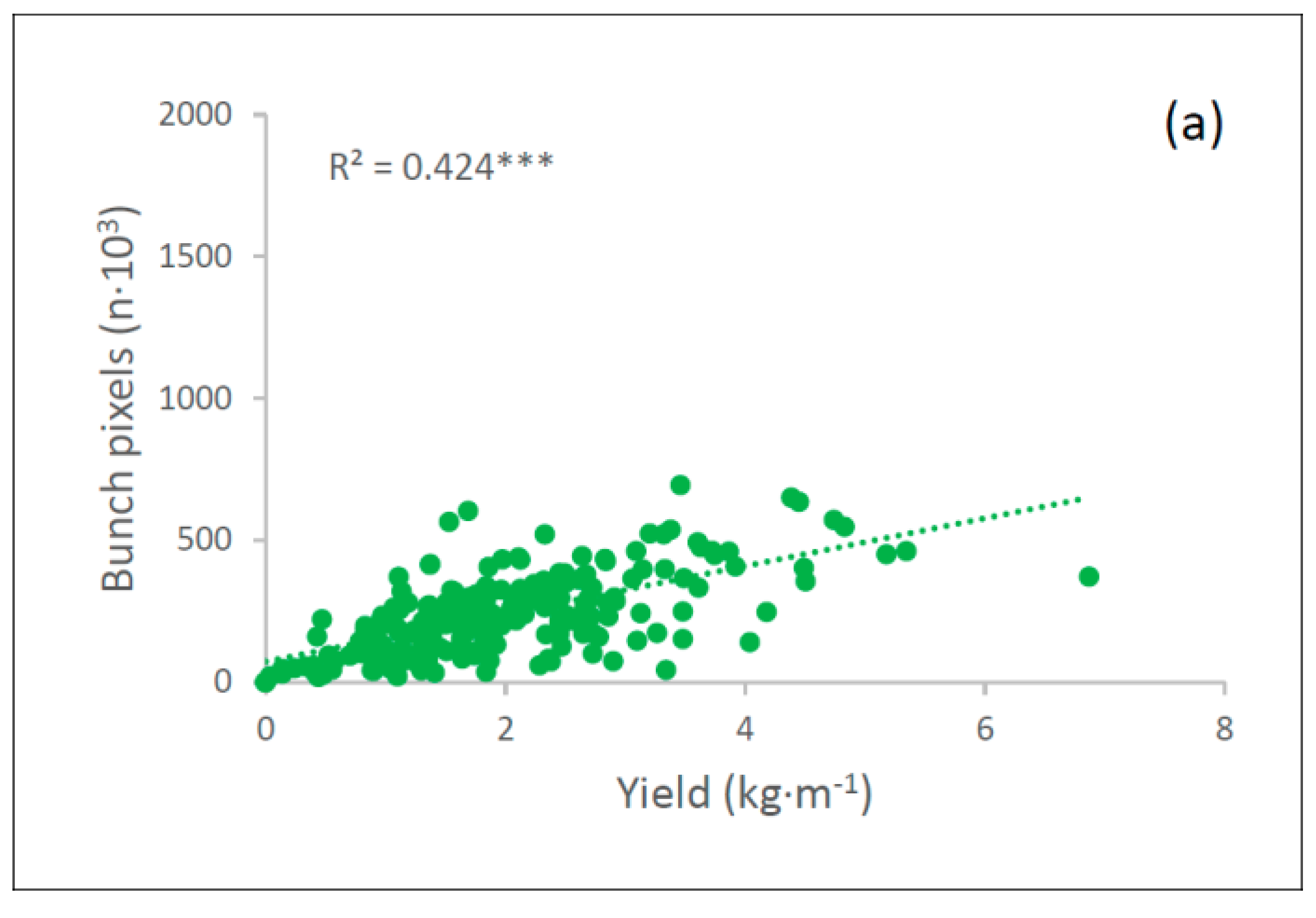
3.3. Yield Estimation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Dunn, G.; Martin, S. The Current Status of Crop Forecasting in the Australian Wine Industry. In Proceedings of the ASVO Seminar Series: Grapegrowing at the Edge, Tanunda, Australia, 10–11 July 2003; Australian Society of Viticulture and Oenology: Tanunda, Australia, 2003; pp. 4–8. [Google Scholar]
- Martin, S.; Dunstone, R.; Dunn, G. How to Forecast Wine Grape Deliveries Using Grape Forecaster Excel Workbook Version 7; Department of Primary Industries: Adelaide, Australia, 2003. [Google Scholar]
- Taylor, J.A.; Tisseyre, B.; Leroux, C. A simple index to determine if within-field spatial production variation exhibits potential management effects: Application in vineyards using yield monitor data. Precis. Agric. 2018, 20, 880–895. [Google Scholar] [CrossRef]
- Cubero, S.; Aleixos, N.; Moltó, E.; Gómez-Sanchis, J.; Blasco, J. Advances in Machine Vision Applications for Automatic Inspection and Quality Evaluation of Fruits and Vegetables. Food Bioprocess Technol. 2011, 4, 487–504. [Google Scholar] [CrossRef]
- Lorente, D.; Aleixos, N.; Gomezsanchis, J.; Cubero, S.; García-Navarrete, O.L.; Blasco, J. Recent Advances and Applications of Hyperspectral Imaging for Fruit and Vegetable Quality Assessment. Food Bioprocess Technol. 2012, 5, 1121–1142. [Google Scholar] [CrossRef]
- Palacios, F.; Diago, M.P.; Tardaguila, J. A Non-Invasive Method Based on Computer Vision for Grapevine Cluster Compactness Assessment Using a Mobile Sensing Platform under Field Conditions. Sensors 2019, 19, 3799. [Google Scholar] [CrossRef] [PubMed]
- Millan, B.; Diago, M.P.; Aquino, A.; Palacios, F.; Tardaguila, J. Vineyard pruning weight assessment by machine vision: Towards an on-the-go measurement system. OENO One 2019, 53, 307–319. [Google Scholar] [CrossRef]
- Diago, M.; Aquino, A.; Millan, B.; Palacios, F.; Tardaguila, J. On-the-go assessment of vineyard canopy porosity, bunch and leaf exposure by image analysis. Aust. J. Grape Wine Res. 2019, 25, 363–374. [Google Scholar] [CrossRef]
- Dunn, G.M.; Martin, S.R. Yield prediction from digital image analysis: A technique with potential for vineyard assessments prior to harvest. Aust. J. Grape Wine Res. 2008, 10, 196–198. [Google Scholar] [CrossRef]
- Nuske, S.; Wilshusen, K.; Achar, S.; Yoder, L.; Narasimhan, S.; Singh, S. Automated Visual Yield Estimation in Vineyards. J. Field Robot. 2014, 31, 837–860. [Google Scholar] [CrossRef]
- Kicherer, A.; Klodt, M.; Sharifzadeh, S.; Cremers, D.; Töpfer, R.; Herzog, K. Automatic image-based determination of pruning mass as a determinant for yield potential in grapevine management and breeding. Aust. J. Grape Wine Res. 2017, 23, 120–124. [Google Scholar] [CrossRef]
- Millan, B.; Velasco-Forero, S.; Aquino, A.; Tardaguila, J. On-the-Go Grapevine Yield Estimation Using Image Analysis and Boolean Model. J. Sensors 2018, 2018, 1–14. [Google Scholar] [CrossRef]
- Aquino, A.; Millan, B.; Diago, M.-P.; Tardaguila, J. Automated early yield prediction in vineyards from on-the-go image acquisition. Comput. Electron. Agric. 2018, 144, 26–36. [Google Scholar] [CrossRef]
- Grimm, J.; Herzog, K.; Rist, F.; Kicherer, A.; Töpfer, R.; Steinhage, V. An adaptable approach to automated visual detection of plant organs with applications in grapevine breeding. Biosyst. Eng. 2019, 183, 170–183. [Google Scholar] [CrossRef]
- Zabawa, L.; Kicherer, A.; Klingbeil, L.; Töpfer, R.; Kuhlmann, H.; Roscher, R. Counting of grapevine berries in images via semantic segmentation using convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2020, 164, 73–83. [Google Scholar] [CrossRef]
- Liu, S.; Li, X.; Wu, H.; Xin, B.; Tang, J.; Petrie, P.R.; Whitty, M. A robust automated flower estimation system for grape vines. Biosyst. Eng. 2018, 172, 110–123. [Google Scholar] [CrossRef]
- Palacios, F.; Bueno, G.; Salido, J.; Diago, M.P.; Hernández, I.; Tardaguila, J. Automated grapevine flower detection and quantification method based on computer vision and deep learning from on-the-go imaging using a mobile sensing platform under field conditions. Comput. Electron. Agric. 2020, 178, 105796. [Google Scholar] [CrossRef]
- Palacios, F.; Melo-Pinto, P.; Diago, M.P.; Tardaguila, J. Deep Learning and Computer Vision for Assessing the Number of Total Berries and Yield in Commercial Vineyards. Comput. Electron. Agric. under review.
- Smart, R.; Robinson, M. Sunlight into Wine: A Handbook for Winegrape Canopy Management; Winetitles: Adelaide, Australia, 1991; 88p. [Google Scholar]
- Pastore, C.; Allegro, G.; Valentini, G.; Muzzi, E.; Filippetti, I. Anthocyanin and flavonol composition response to veraison leaf removal on Cabernet Sauvignon, Nero d’Avola, Raboso Piave and Sangiovese Vitis vinifera L. cultivars. Sci. Hortic. 2017, 218, 147–155. [Google Scholar] [CrossRef]
- Austin, C.N.; Wilcox, W.F. Effects of Sunlight Exposure on Grapevine Powdery Mildew Development. Phytopathology. 2012, 102, 857–866. [Google Scholar] [CrossRef]
- Tardaguila, J.; De Toda, F.M.; Poni, S.; Diago, M.P. Impact of Early Leaf Removal on Yield and Fruit and Wine Composition of Vitis Vinifera L. Graciano and Carignan. Am. J. Enol. Vitic. 2010, 61, 372–381. [Google Scholar]
- Diago, M.-P.; Correa, C.; Millán, B.; Barreiro, P.; Valero, C.; Tardaguila, J. Grapevine Yield and Leaf Area Estimation Using Supervised Classification Methodology on RGB Images Taken under Field Conditions. Sensors 2012, 12, 16988–17006. [Google Scholar] [CrossRef]
- Diago, M.P.; Krasnow, M.; Bubola, M.; Millán, B.; Tardaguila, J. Assessment of Vineyard Canopy Porosity Using Machine Vision. Am. J. Enol. Vitic. 2016, 67, 229–238. [Google Scholar] [CrossRef]
- Agoston, M.K. Computer Graphics and Geometric Modeling: Implementation and Algo-rithms; Springer: London, UK, 2005. [Google Scholar]
- Soille, P. Erosion and Dilation. In Morphological Image Analysis; Springer Science and Business Media LLC: London, UK, 2004; pp. 63–103. [Google Scholar]
- Victorino, G.F.; Braga, R.; Santos-Victor, J.; Lopes, C.M. Yield components detection and image-based indicators for non-invasive grapevine yield prediction at different phenological phases. OENO One 2020, 54, 833–848. [Google Scholar] [CrossRef]
- Gatti, M.; Dosso, P.; Maurino, M.; Merli, M.C.; Bernizzoni, F.; Pirez, F.J.; Platè, B.; Bertuzzi, G.C.; Poni, S. MECS-VINE®: A New Proximal Sensor for Segmented Mapping of Vigor and Yield Parameters on Vineyard Rows. Sensors 2016, 16, 2009. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vineyard Plot | Cordon | Row Spacing (m) | Vine Spacing (m) | Altitude (m) | Row Orientation |
|---|---|---|---|---|---|
| A | Single | 3.0 | 1.0 | 700 | NE–SW |
| B | Single | 3.0 | 1.0 | 680 | NE–SW |
| C | Double | 2.5 | 1.20 | 510 | E–W |
| D | Double | 2.5 | 1.20 | 500 | NE–SW |
| E | Double | 2.5 | 1.10 | 555 | N–S |
| Plot | Mean | SD | CV | Min | Max | Skewness | Kurtosis | |
|---|---|---|---|---|---|---|---|---|
| Yield (kg·m−1) | A | 2.33 | 0.97 | 41.68 | 0.58 | 4.04 | −0.02 | −0.93 |
| B | 1.96 | 1.02 | 51.77 | 0.19 | 5.34 | 0.86 | 1.68 | |
| C | 2.82 | 1.24 | 44.07 | 0.52 | 6.63 | 0.60 | 0.29 | |
| D | 2.79 | 1.66 | 59.51 | 0.00 | 6.20 | 0.23 | −0.45 | |
| E | 2.60 | 1.47 | 56.67 | 0.00 | 6.18 | 0.52 | −0.02 | |
| ALL | 2.53 | 1.35 | 53.26 | 0.00 | 6.63 | 0.56 | 0.30 | |
| Bunch Number (Number per Meter) | A | 9.78 | 2.94 | 30.04 | 4.41 | 15.45 | −0.12 | −0.89 |
| B | 8.70 | 3.48 | 40.01 | 1.33 | 15.52 | 0.01 | −0.51 | |
| C | 9.51 | 3.36 | 35.31 | 1.59 | 17.65 | −0.22 | −0.20 | |
| D | 9.00 | 4.76 | 52.85 | 0.00 | 20.00 | −0.10 | −0.40 | |
| E | 8.36 | 4.16 | 49.72 | 0.00 | 17.19 | 0.16 | −0.84 | |
| ALL | 9.06 | 3.84 | 42.41 | 0.00 | 20.00 | −0.11 | −0.30 | |
| Bunch Weight (kg) | A | 0.23 | 0.05 | 21.79 | 0.12 | 0.31 | −0.47 | −0.57 |
| B | 0.23 | 0.09 | 39.64 | 0.07 | 0.58 | 1.80 | 4.87 | |
| C | 0.30 | 0.09 | 28.99 | 0.18 | 0.71 | 2.13 | 7.53 | |
| D | 0.28 | 0.13 | 44.89 | 0.00 | 0.58 | −0.54 | 0.54 | |
| E | 0.35 | 0.12 | 34.08 | 0.00 | 0.65 | −0.36 | 1.81 | |
| ALL | 0.28 | 0.11 | 38.87 | 0.00 | 0.71 | 0.64 | 3.26 |
| Plot | Mean (%) | SD | CV | Min | Max | Skewness | Kurtosis | |
|---|---|---|---|---|---|---|---|---|
| No Defoliation | A | 16.31 | 9.41 | 57.72 | 4.24 | 43.88 | 1.13 | 0.66 |
| B | 7.62 | 7.46 | 97.93 | 0.34 | 29.71 | 1.45 | 1.27 | |
| C | 21.78 | 9.36 | 42.98 | 7.50 | 50.14 | 0.67 | 0.44 | |
| D | 24.40 | 12.48 | 51.15 | 5.77 | 68.88 | 1.31 | 2.32 | |
| E | 25.75 | 10.04 | 39.00 | 4.72 | 45.38 | −0.14 | −0.56 | |
| ALL | 19.80 | 11.81 | 59.65 | 0.34 | 68.88 | 0.65 | 0.65 | |
| Partial Defoliation | A | 25.73 | 11.34 | 44.08 | 8.84 | 50.54 | 0.57 | −0.62 |
| B | 12.67 | 8.94 | 70.60 | 1.12 | 42.94 | 1.39 | 1.88 | |
| C | 31.73 | 12.37 | 38.99 | 8.41 | 63.90 | 0.44 | 0.07 | |
| D | 34.21 | 12.33 | 36.05 | 9.96 | 70.76 | 0.64 | 0.83 | |
| E | 35.38 | 11.97 | 33.84 | 13.47 | 62.83 | 0.06 | −0.70 | |
| ALL | 28.71 | 14.01 | 48.81 | 1.12 | 70.76 | 0.26 | −0.35 | |
| Full Defoliation | A | 60.76 | 6.65 | 10.95 | 41.32 | 77.46 | −0.31 | 0.80 |
| B | 40.51 | 9.38 | 23.14 | 15.79 | 60.00 | −0.40 | 0.12 | |
| C | 55.44 | 9.86 | 17.79 | 32.34 | 76.51 | −0.36 | −0.50 | |
| D | 60.13 | 10.30 | 17.13 | 43.61 | 89.05 | 0.75 | 0.10 | |
| E | 53.95 | 9.08 | 16.83 | 30.09 | 71.27 | −0.46 | −0.31 | |
| ALL | 54.47 | 11.48 | 21.08 | 15.79 | 89.05 | −0.33 | 0.38 |
| Plot | Mean (%) | SD | CV | Min | Max | Skewness | Kurtosis | |
|---|---|---|---|---|---|---|---|---|
| No Defoliation | A | 60.17 | 15.06 | 25.02 | 12.16 | 82.27 | −1.02 | 1.26 |
| B | 54.62 | 15.12 | 27.69 | 19.16 | 82.32 | −0.56 | −0.27 | |
| C | 28.51 | 12.03 | 42.20 | 7.44 | 60.72 | 0.31 | −0.30 | |
| D | 41.46 | 15.42 | 37.21 | 3.17 | 71.70 | −0.64 | −0.17 | |
| E | 32.92 | 13.47 | 40.91 | 9.65 | 72.21 | 0.28 | 0.03 | |
| ALL | 42.33 | 18.48 | 43.65 | 3.17 | 82.32 | 0.07 | −0.78 | |
| Partial Defoliation | A | 41.60 | 12.82 | 30.82 | 9.61 | 66.00 | −0.62 | −0.14 |
| B | 36.42 | 12.90 | 35.41 | 10.10 | 61.00 | 0.04 | −0.75 | |
| C | 17.01 | 8.82 | 51.83 | 3.47 | 44.66 | 0.72 | 0.54 | |
| D | 28.37 | 11.36 | 40.04 | 2.56 | 52.92 | −0.27 | −0.59 | |
| E | 19.48 | 9.90 | 50.81 | 2.31 | 48.99 | 0.38 | 0.17 | |
| ALL | 27.67 | 14.44 | 52.17 | 2.31 | 66.00 | 0.35 | −0.66 | |
| Full Defoliation | A | 0.62 | 0.24 | 10.56 | 0.01 | 0.86 | 0.37 | −0.50 |
| B | 0.35 | 0.12 | 10.57 | 0.02 | 0.66 | 0.94 | 0.14 | |
| C | 0.48 | 0.25 | 22.52 | 0.01 | 0.74 | 0.33 | 0.91 | |
| D | 0.07 | 0.10 | 46.42 | 0.00 | 0.23 | 0.98 | 0.56 | |
| E | 0.56 | 0.14 | 46.18 | 0.00 | 0.76 | 0.92 | 0.70 | |
| ALL | 0.42 | 0.17 | 24.80 | 0.01 | 0.86 | 1.20 | 1.15 |
| Plot | Mean (%) | SD | CV | Min | Max | Skewness | Kurtosis | |
|---|---|---|---|---|---|---|---|---|
| No Defoliation | A | 5.49 | 3.28 | 59.73 | 0.90 | 14.69 | 0.85 | 0.09 |
| B | 5.88 | 3.59 | 61.05 | 1.00 | 14.96 | 0.99 | 0.45 | |
| C | 11.88 | 6.03 | 50.79 | 1.19 | 28.60 | 0.53 | 0.27 | |
| D | 13.03 | 7.18 | 55.08 | 0.93 | 32.08 | 0.18 | −0.58 | |
| E | 15.12 | 5.56 | 36.77 | 3.10 | 29.48 | 0.31 | 0.21 | |
| ALL | 10.68 | 6.63 | 62.10 | 0.90 | 32.08 | 0.60 | −0.21 | |
| Partial Defoliation | A | 11.15 | 3.20 | 28.68 | 3.95 | 17.02 | −0.31 | −0.42 |
| B | 11.51 | 5.13 | 44.58 | 3.00 | 23.47 | 0.16 | −0.52 | |
| C | 15.81 | 6.60 | 41.72 | 4.10 | 30.14 | 0.28 | −0.51 | |
| D | 16.48 | 7.86 | 47.68 | 0.97 | 36.47 | −0.14 | −0.18 | |
| E | 19.15 | 6.67 | 34.80 | 5.98 | 37.16 | 0.70 | 0.40 | |
| ALL | 15.12 | 6.88 | 45.50 | 0.97 | 37.16 | 0.50 | 0.30 | |
| Full Defoliation | A | 17.57 | 4.12 | 23.45 | 5.60 | 26.24 | −0.37 | 0.76 |
| B | 17.66 | 6.40 | 36.26 | 5.31 | 32.59 | 0.18 | −0.13 | |
| C | 19.18 | 7.30 | 38.07 | 5.23 | 32.73 | 0.01 | −0.88 | |
| D | 19.10 | 8.84 | 46.26 | 0.92 | 37.35 | −0.59 | −0.14 | |
| E | 20.54 | 7.49 | 36.48 | 6.07 | 44.74 | 0.83 | 1.05 | |
| ALL | 18.91 | 7.15 | 37.83 | 0.92 | 44.74 | 0.09 | 0.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Íñiguez, R.; Palacios, F.; Barrio, I.; Hernández, I.; Gutiérrez, S.; Tardaguila, J. Impact of Leaf Occlusions on Yield Assessment by Computer Vision in Commercial Vineyards. Agronomy 2021, 11, 1003. https://doi.org/10.3390/agronomy11051003
Íñiguez R, Palacios F, Barrio I, Hernández I, Gutiérrez S, Tardaguila J. Impact of Leaf Occlusions on Yield Assessment by Computer Vision in Commercial Vineyards. Agronomy. 2021; 11(5):1003. https://doi.org/10.3390/agronomy11051003
Chicago/Turabian StyleÍñiguez, Rubén, Fernando Palacios, Ignacio Barrio, Inés Hernández, Salvador Gutiérrez, and Javier Tardaguila. 2021. "Impact of Leaf Occlusions on Yield Assessment by Computer Vision in Commercial Vineyards" Agronomy 11, no. 5: 1003. https://doi.org/10.3390/agronomy11051003
APA StyleÍñiguez, R., Palacios, F., Barrio, I., Hernández, I., Gutiérrez, S., & Tardaguila, J. (2021). Impact of Leaf Occlusions on Yield Assessment by Computer Vision in Commercial Vineyards. Agronomy, 11(5), 1003. https://doi.org/10.3390/agronomy11051003