On-Farm Evaluation of Prescription Map-Based Variable Rate Application of Pesticides in Vineyards




Abstract
1. Introduction
- Development of canopy variable maps using information acquired by specific remote sensing.
- Establishment of a protocol to transform canopy maps into PPP prescription maps;
- Implementation of the corresponding hardware and software on a commercial sprayer to enable georeferenced variable spray application according the developed prescription maps;
- Quantification of the benefits of the developed prototype in the global context of spray application.
2. Materials and Methods
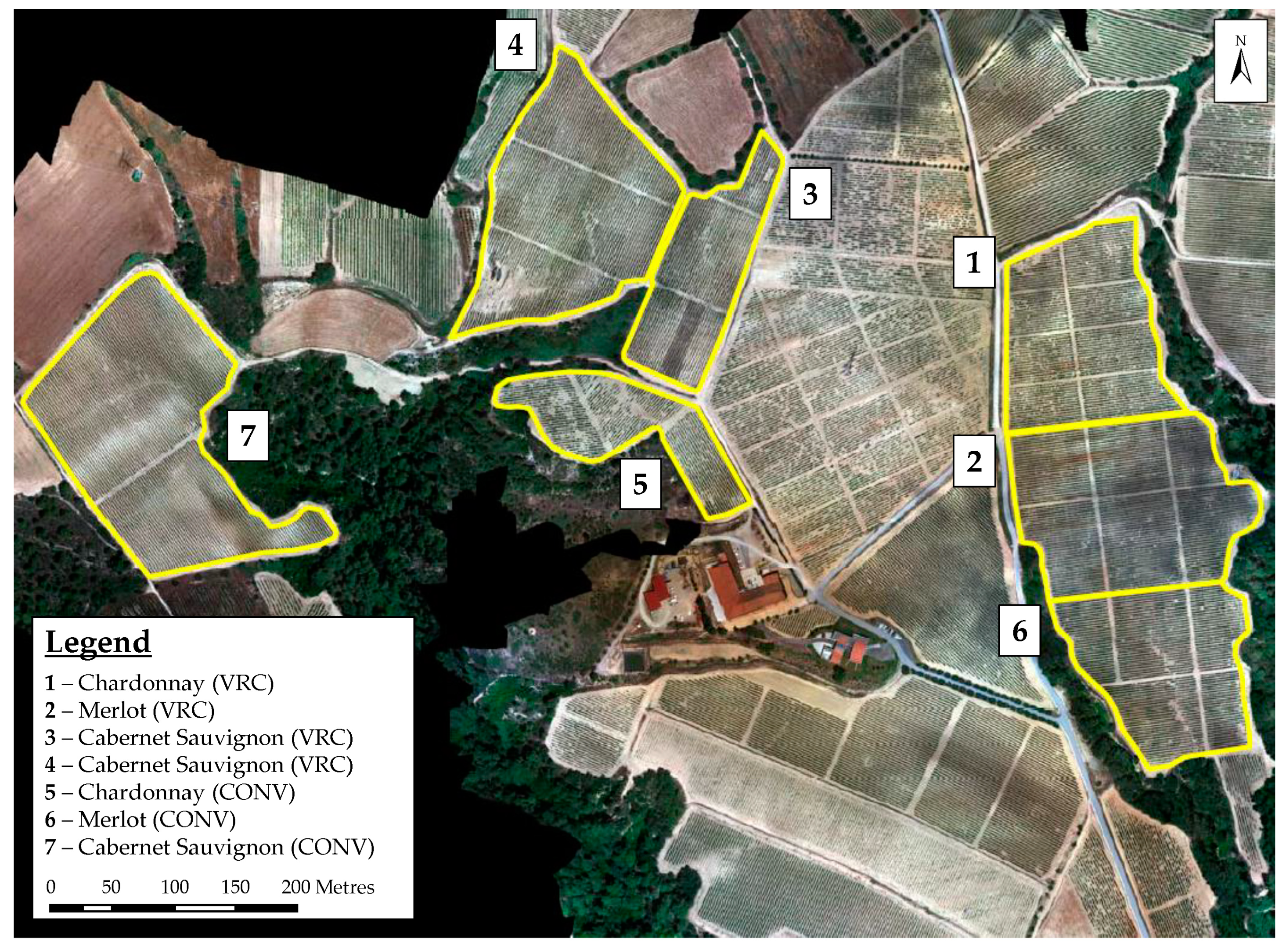
2.1. Experimental Site
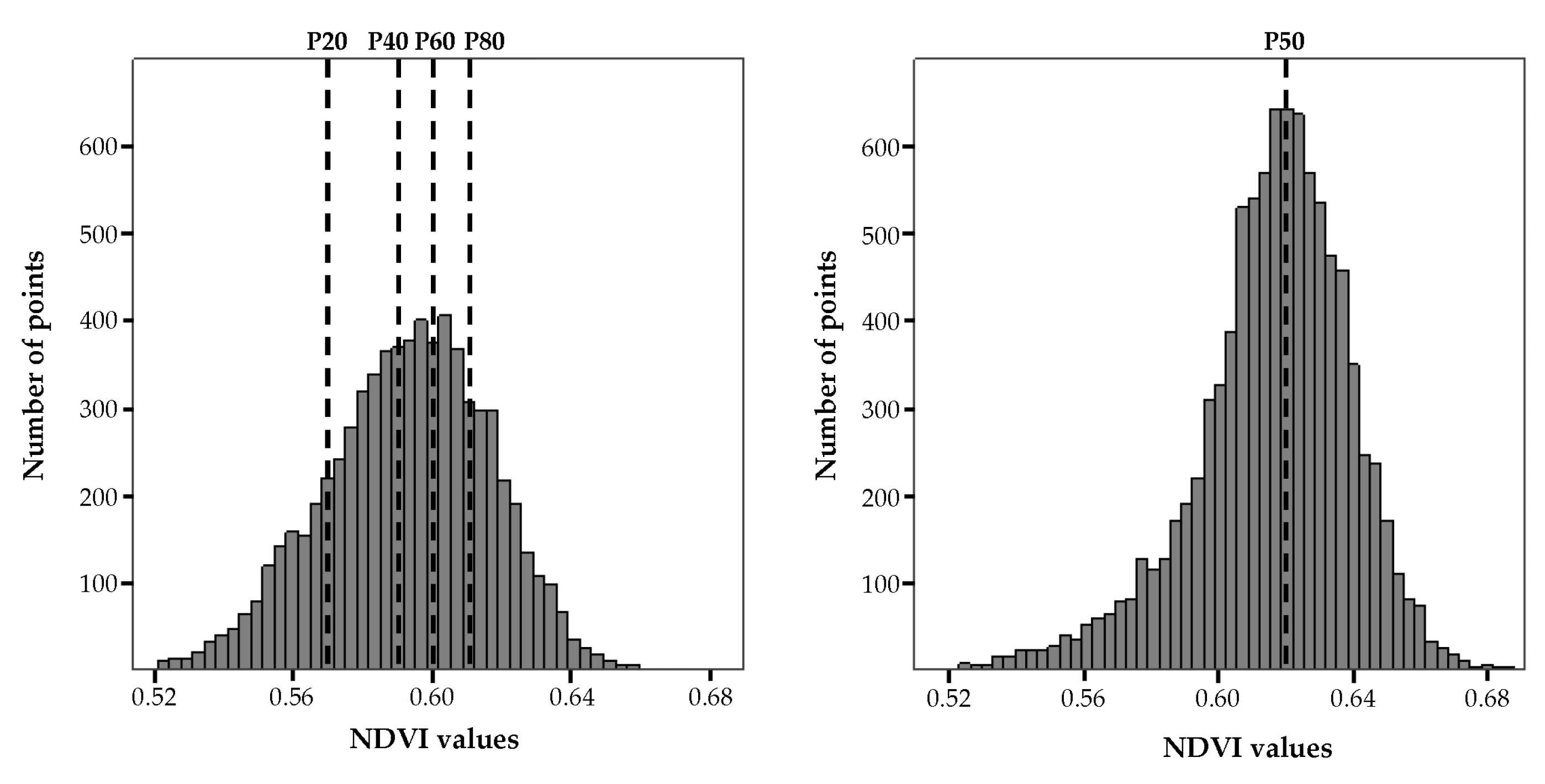
2.2. Generation of Canopy Vigor Maps
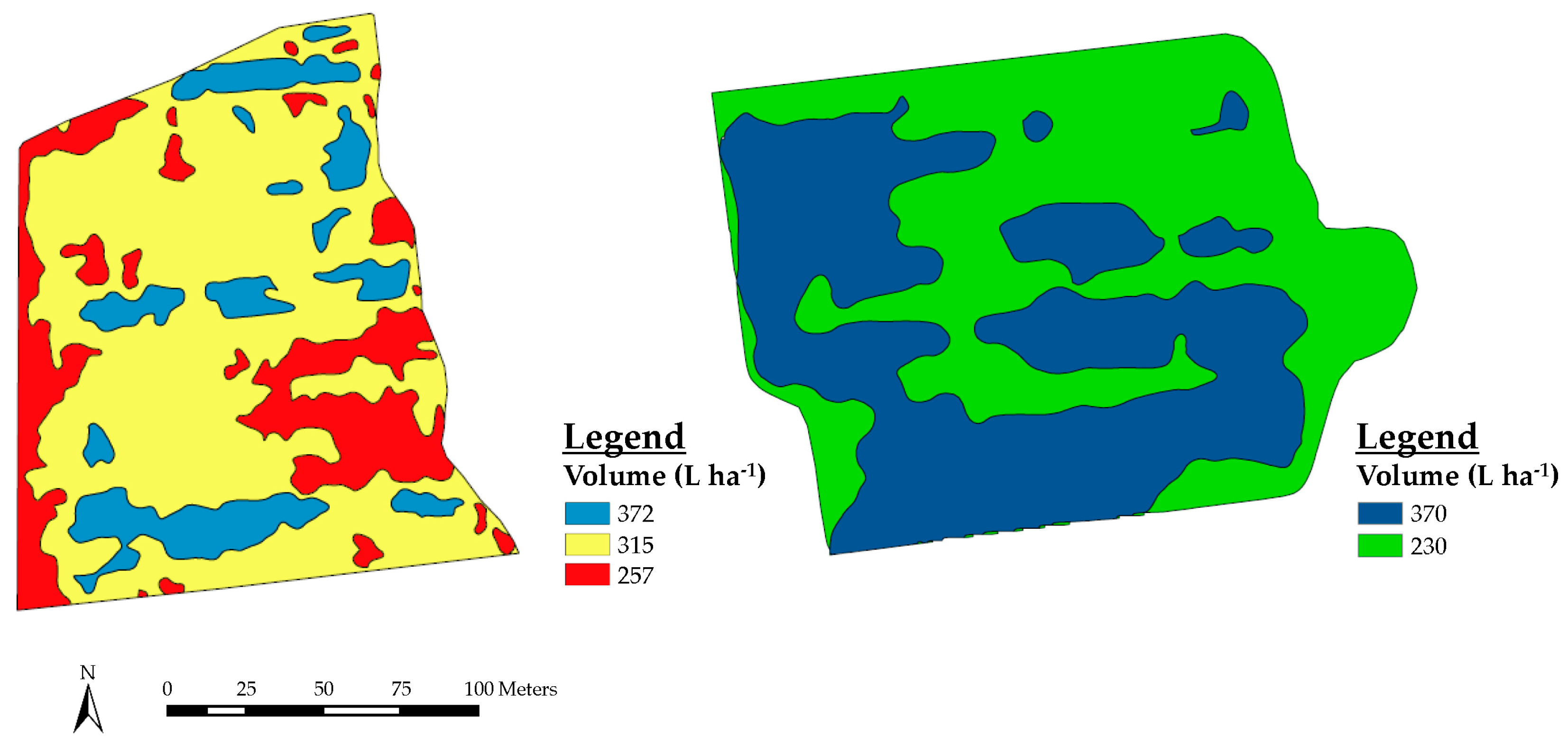
2.3. Generation of Prescription Maps for Variable Spray Application
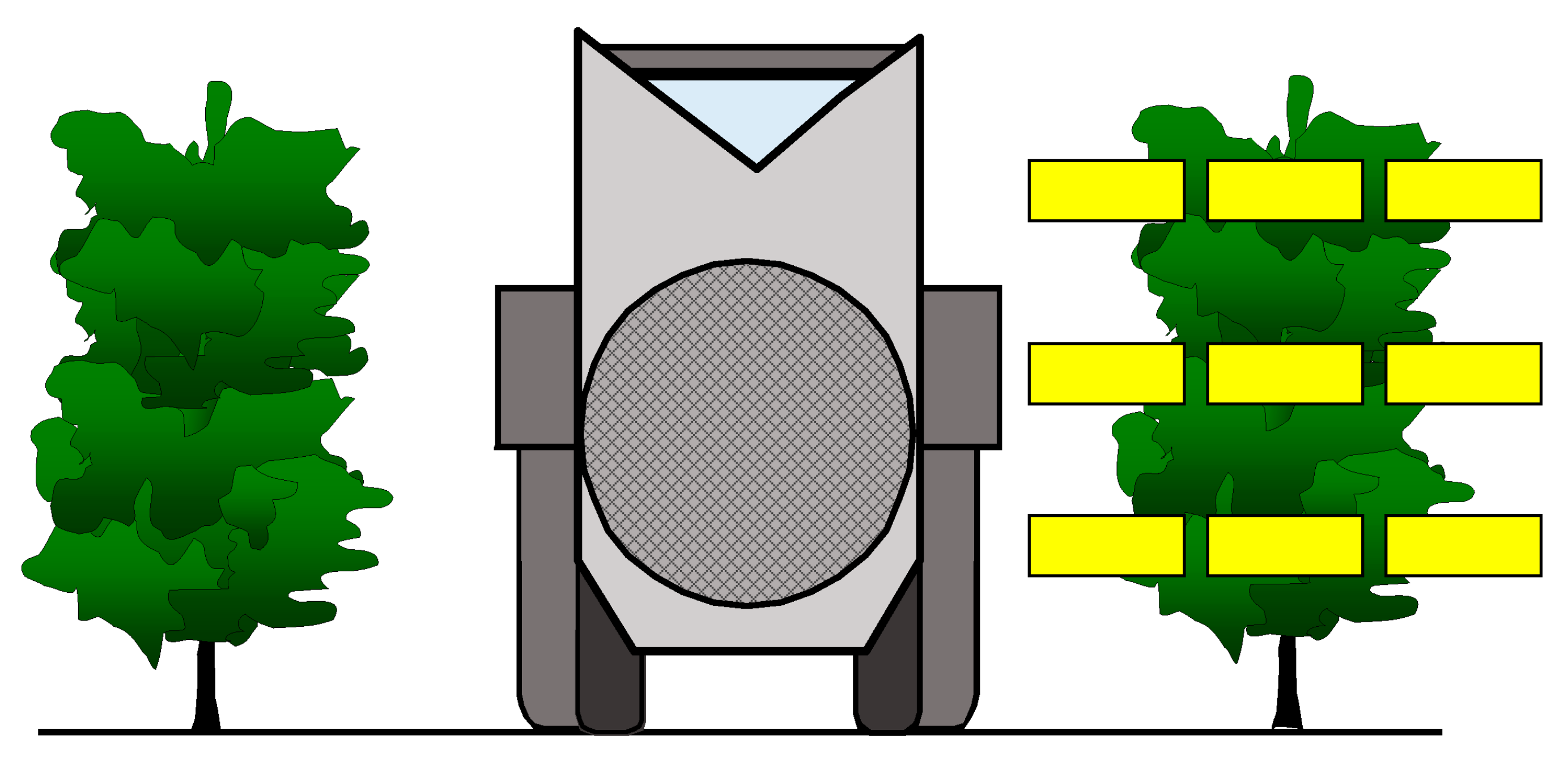
2.4. Adapted Sprayer for Variable Rate Application
2.5. Generation of Actual Variable Rate Application Maps
2.6. Evaluation of the System Accuracy
2.7. Evaluation of Spray Distribution Quality
2.8. Evaluation of the Biological Efficacy
2.9. Statistical Analyses
3. Results and Discussion
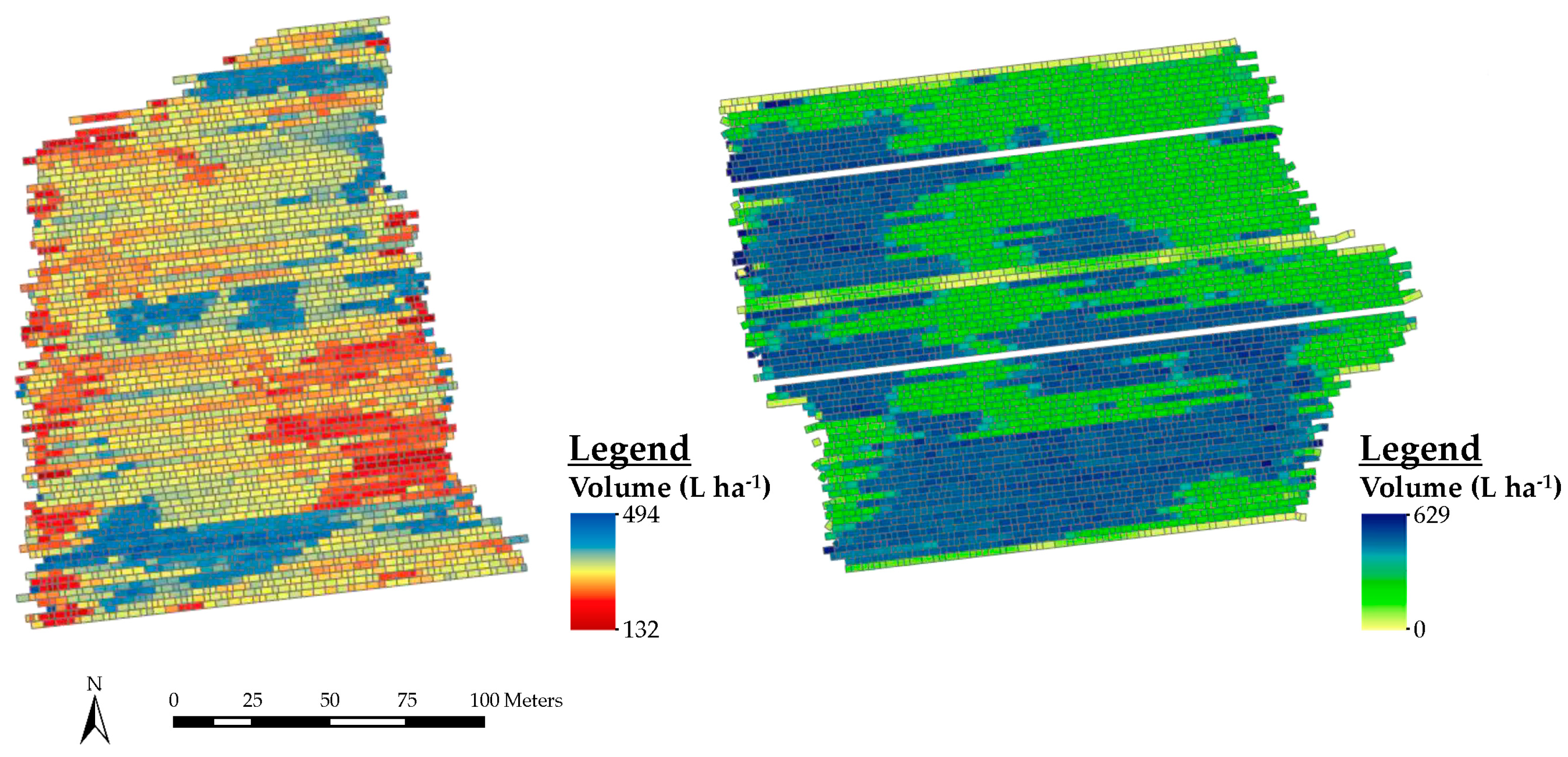
3.1. Canopy Vigor Maps, Prescription Maps and Actual Variable Rate Application Maps
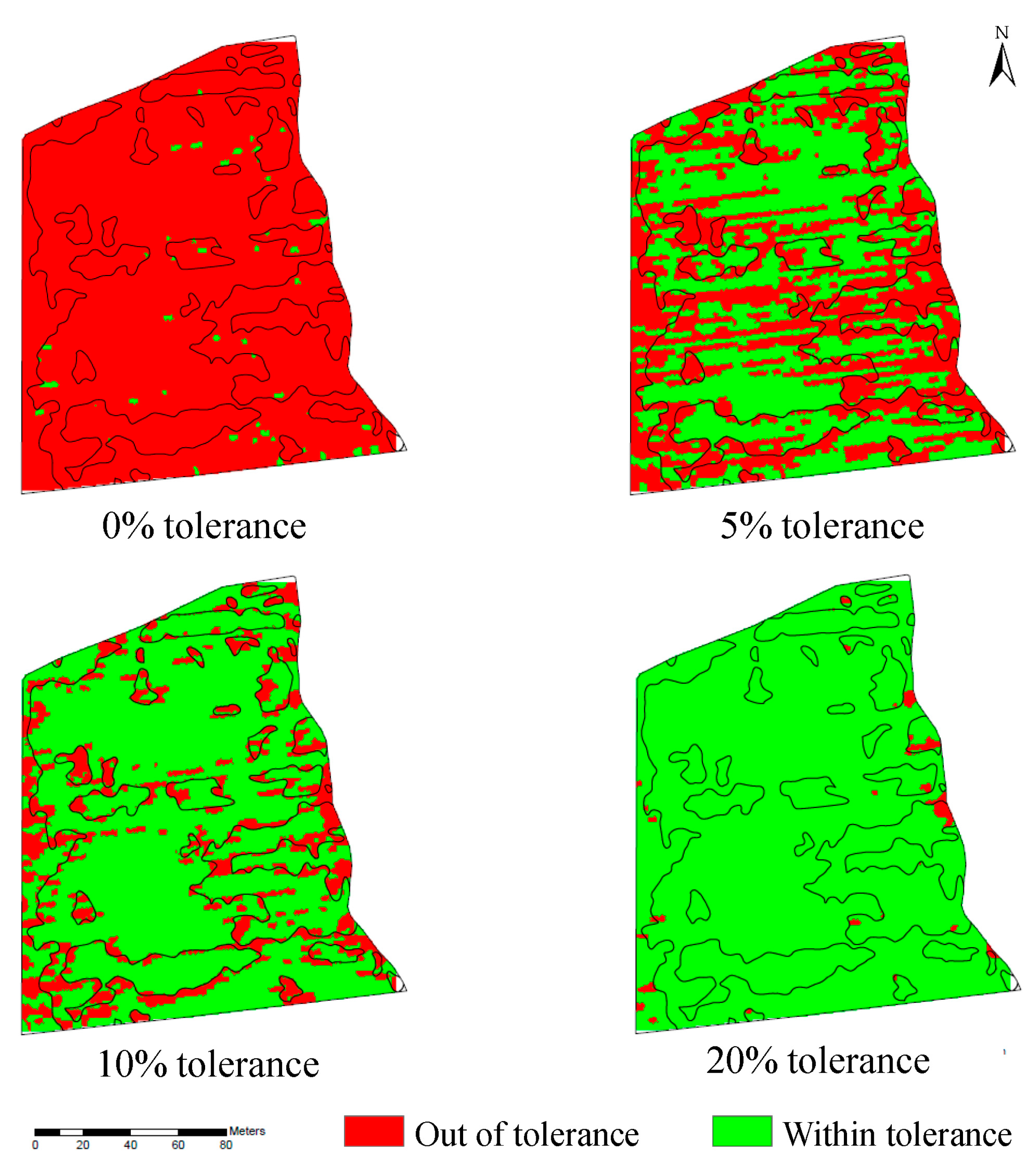
3.2. Accuracy of the System
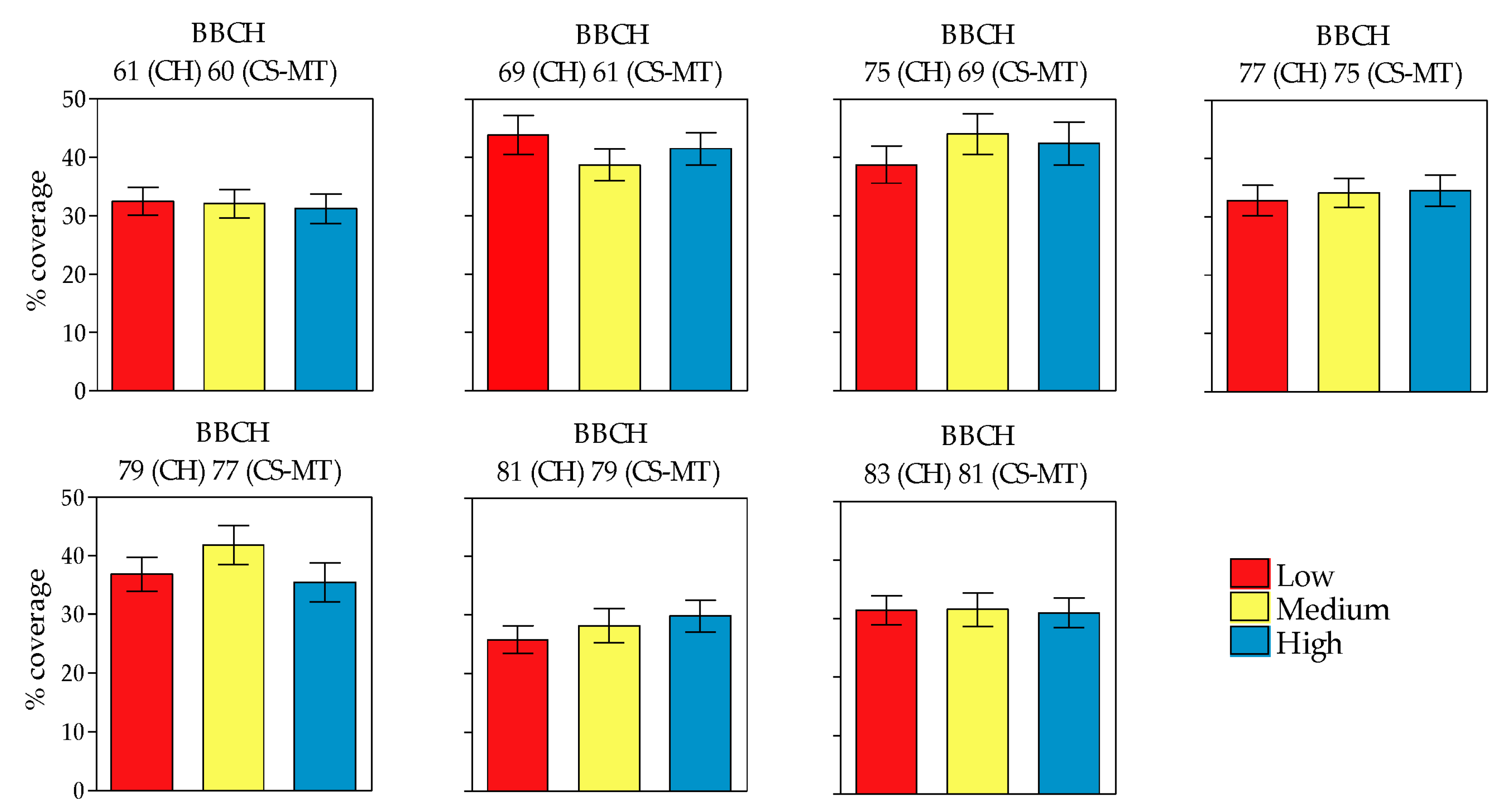
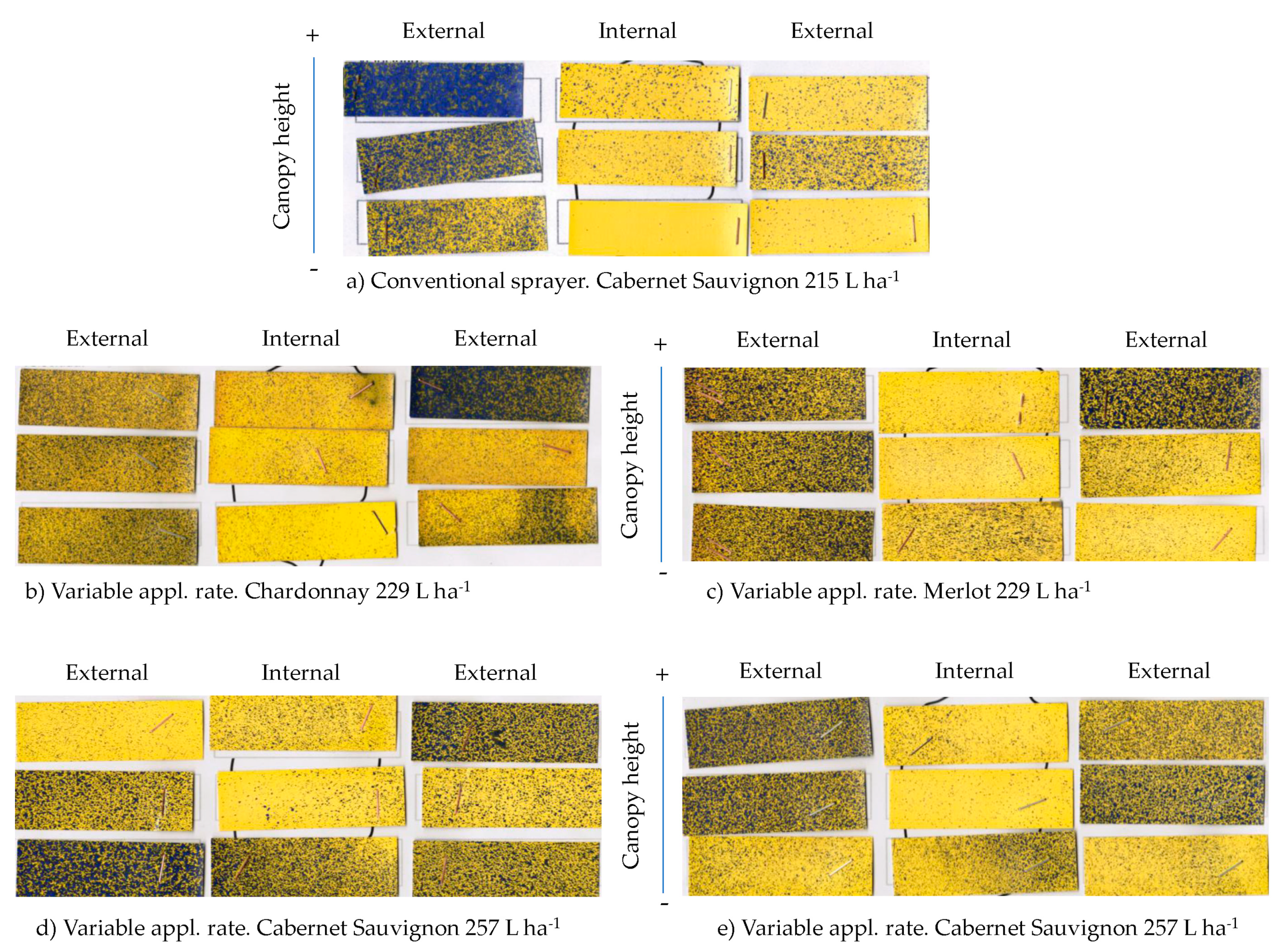
3.3. Evaluation of Spray Distribution Quality
3.4. Evaluation of the Biological Efficacy
4. Conclusions
- The classified vigor maps were simply transformed into prescription maps by taking into account the structural canopy characteristics;
- The system was able to read a prescription map and appropriately modify the working parameters (working pressure) depending on the position of the sprayer in the field;
- A system accuracy of approximately 80% was obtained, assuming a tolerance of 10% deviation;
- Despite changing the working pressure and volume rate between the vigor zones, the coverage values that were obtained during the spray applications can be considered similar in all cases. The coverage was also deemed adequate in minimum terms to ensure pest/disease control in all cases;
- The variable rate application process, based on the combination of vigor maps with the DSS Dosaviña® to determine the optimal volume rate, can obtain equivalent results regarding biological efficacy as a conventional pest application process;
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Giles, D.; Billing, R. Deployment and performance of a uav for crop spraying. Chem. Eng. Trans. 2015, 44, 307–312. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Llorens, J.; Rodriguez-Lizana, A.; Cuenca, A.; Gil, E.; Blanco-Roldán, G.L.; Gil-Ribes, J. Assessing the optimal liquid volume to be sprayed on isolated olive trees according to their canopy volumes. Sci. Total Environ. 2016, 568, 269–305. [Google Scholar] [CrossRef]
- Gil, E.; Campos, J.; Ortega, P.; Llop, J.; Gras, A.; Armengol, E.; Salcedo, R.; Gallart, M. Dosaviña: Tool to calculate the optimal volume rate and pesticide amount in vineyard spray applications based on a modified leaf wall area method. Comput. Electron. Agric. 2019, 160, 117–130. [Google Scholar] [CrossRef]
- Siegfried, W.; Viret, O.; Huber, B.; Wohlhauser, R. Dosage of plant protection products adapted to leaf area index in viticulture. Crop Prot. 2007, 26, 73–82. [Google Scholar] [CrossRef]
- Furness, G.O.; Thompson, A.J. Using point of first run-off and spray volume in litres per 100 metres per metre of canopy height for setting pesticide dose. Agric. Eng. Int. Gigr. Ejournal 2008, 10, 08006. [Google Scholar]
- Walklate, P.J.; Cross, J.V.; Pergher, G. Support system for efficient dosage of orchard and vineyard spraying products. Comput. Electron. Agric. 2011, 75, 355–362. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, H.; Ozkan, H.E. Development of a variable-rate-sprayer with laser scanning sensor to synchronize sprayer outputs to tree structures. Trans. ASABE 2012, 55, 773–781. [Google Scholar] [CrossRef]
- Codis, S.; Douzals, J.P. Comparaison des systèmes d’expression des doses de produits de protection de la vigne dans 5 pays européens et les besoins d’une harmonisation. In Proceedings of the AFPP-CIETAP-Conference Sur Les Techniques D’application de Produits de Protection des Plantes, Lyon, France, 15–16 March 2012; p. 10. [Google Scholar]
- Gil, E.; Gallart, M.; Llorens, J.; Llop, J.; Bayer, T.; Carvalho, C. Spray adjustments based on LWA concept in vineyard. Relationship between canopy and coverage for different application settings. In Proceedings of the Aspects of Applied Biology 122, International Advances in Pesticide Application, Oxford, UK, 8–10 January 2014; pp. 25–32. [Google Scholar]
- Garcerá, C.; Fonte, A.; Moltó, E.; Chueca, P. Sustainable use of pesticide applications in citrus: A support tool for volume rate adjustment. Int. J. Environ. Res. Public Health 2017, 14, 715–728. [Google Scholar] [CrossRef] [PubMed]
- Du, Q.; Chang, N.B.; Yang, C.; Srilakshmi, K.R. Combination of multispectral remote sensing, variable rate technology and environmental modeling for citrus pest management. J. Environ. Manag. 2008, 86, 14–26. [Google Scholar] [CrossRef]
- Escolà, A.; Rosell-Polo, J.R.; Planas, S.; Gil, E.; Pomar, J.; Camp, F.; Llorens, J.; Solanelles, F. Variable rate sprayer Part 1—Orchard prototype: Design, implementation and validation. Comput. Electron. Agric. 2013, 95, 122–135. [Google Scholar] [CrossRef]
- Gil, E.; Llorens, J.; Llop, J.; Escolà, A.; Rosell-Polo, J.R. Variable rate sprayer. Part 2—Vineyard 1 prototype: Design, implementation and validation. Comput. Electron. Agric. 2013, 95, 136–150. [Google Scholar] [CrossRef]
- De Castro, A.I.; Jiménez-Brenes, F.M.; Torres-Sánchez, J.; Peña, J.M.; Borra-Serrano, I.; López-Granados, F. 3-D characterization of vineyards using a novel UAV imagery-based OBIA procedure for precision viticulture applications. Remote Sens. 2018, 10, 584. [Google Scholar] [CrossRef]
- Hall, A.; Lamb, D.W.; Holzapfel, B.; Louis, J. Optical remote sensing applications in viticulture – A review. Aust. J. Grape Wine Res. 2002, 8, 36–47. [Google Scholar] [CrossRef]
- Johnson, L.F.; Roczen, D.E.; Youkhana, S.K.; Nemani, R.R.; Bosch, D.F. Mapping Vineyard leaf area with multispectral satellite imagery. Comput. Electron. Agric. 2003, 38, 37–48. [Google Scholar] [CrossRef]
- Baluja, J.; Diago, M.P.; Balda, P.; Zorer, R.; Meggio, F.; Morales, F.; Tardaguila, J. Assessment of vineyard water status variability by thermal and multispectral imagery using an Unmanned Aerial Vehicle (UAV). Irrig. Sci. 2012, 30, 511–522. [Google Scholar] [CrossRef]
- Albetis, J.; Duthoit, S.; Guttler, F.; Jacquin, A.; Goulard, M.; Poilvé, H.; Féret, J.-B.; Dedieu, G. Detection of Flavescence dorée grapevine disease using Unmanned Aerial Vehicle (UAV) multispectral imagery. Remote Sens. 2017, 9, 308. [Google Scholar] [CrossRef]
- Mathews, A.J.; Jensen, J.L.R. Visualizing and quantifying vineyard canopy LAI using an Unmanned Aerial Vehicle (UAV) collected high density structure from motion point cloud. Remote Sens. 2013, 5, 2164–2183. [Google Scholar] [CrossRef]
- Ballesteros, R.; Ortega, J.F.; Hernández, D.; Moreno, M.Á. Characterization of Vitis vinifera L. canopy using unmanned aerial vehicle-based remote sensing and photogrammetry techniques. Am. J. Enol. Vitic. 2015, 66, 120–129. [Google Scholar] [CrossRef]
- Poblete-Echeverría, C.; Olmedo, G.F.; Ingram, B.; Bardeen, M. Detection and segmentation of vine canopy in ultra-high spatial resolution rgb imagery obtained from Unmanned Aerial Vehicle (UAV): A case study in a commercial vineyard. Remote Sens. 2017, 9, 268. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F. Using 3D point clouds derived from UAV RGB imagery to describe vineyard 3D macro-structure. Remote Sens. 2017, 9, 111. [Google Scholar] [CrossRef]
- Campos, J.; Llop, J.; Gallart, M.; García-Ruíz, F.; Gras, A.; Salcedo, R.; Gil, E. Development of canopy vigor maps using UAV for site-specific management during vineyard spraying process. Precis. Agric. 2019, 20, 1136–1156. [Google Scholar] [CrossRef]
- EU. Directive 2009/128/EC of the European Parliament and of the Council of 21 October 2009 Establishing a Framework for Community Action to Achieve the Sustainable Use of Pesticides. Off. J. Eur. Union 2009, 309, 71–86. [Google Scholar]
- Vogel, J.W.; Wolf, R.E.; Dille, A. Evaluation of a Variable Rate Application System for Site-Specific Weed Management. In Proceedings of the 2005 ASAE Annual Meeting (p. 1); American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2005; Paper No. 051120. [Google Scholar]
- Michaud, M.; Watts, K.C.; Percival, D.C.; Wilkie, K.I. Precision pesticide delivery based on aerial spectral imaging. Can. J. Biosyst. Eng. 2008, 50, 2.9–2.15. [Google Scholar]
- D’Amico, M.; Coppola, A.; Chinnici, G.; Di Vita, G.; Pappalardo, G. Agricultural systems in the European Union: An analysis of regional differences. New Medit. 2013, 12, 28–34. [Google Scholar]
- European Commission. Precision Agriculture: An Opportunity for EU Farmers—Potential Support with the CAP 2014–2020; European Commission Agriculture and Rural Development: Brussels, Belgium, 2014. [Google Scholar]
- European Commission. Structure and Dynamics of EU Farms: Changes, Trends and Policy Relevance. In EU Agricultural Economics Briefs, 9; European Commission Agriculture and Rural Development: Brussels, Belgium, 2013. [Google Scholar]
- Meier, U. BBCH-Monograph. In Growth Stages of Plants-Entwicklungsstadien von Planzen—Estadios de Las Plantas-Développement des Plantes; Blackwell Wissenschaftsverlag: Berlin, Germany; Wien, Austria, 1977; p. 622. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. In Proceedings of the Third ERTS Symposium, NASA SP-351, Washington, DC, USA, 10–14 December 1973; pp. 309–317. [Google Scholar]
- QGIS Development Team. QGIS Geographic Information System. Open Source Geospatial Foundation. Available online: http://qgis.osgeo.org (accessed on 12 May 2018).
- EPPO. Standard Measurement Procedure in High Growing Crop Trials. Available online: https://www.eppo.int/media/uploaded_images/ACTIVITIES/plant_protect_products/Dose_exp_measure_procedure.pdf (accessed on 20 May 2018).
- Bartier, P.M.; Keller, C.P. Multivariate interpolation to incorporate thematic surface data using inverse distance weighting (IDW). Comput. Geosci. 1996, 22, 795–799. [Google Scholar] [CrossRef]
- Gil, E.; Escolà, A. Design of a decision support method to determine volume rate for vineyard spraying. Appl. Eng. Agric. 2009, 25, 145–151. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Rodríguez-Lizana, A.; Gil, E.; Agüera-Vega, J.; Gil-Ribes, J. Influence of liquid-volume and air flow rates on spray application quality and homogeneity in super-intensive olive tree canopies. Sci. Total Environ. 2015, 537, 250–259. [Google Scholar] [CrossRef]
- Llop, J.; Gil, E.; Gallart, M.; Contador, F.; Ercilla, M. Spray distribution evaluation of different setting of a hand-held trolley sprayer used in green house tomato crops. Pest Manag. 2015, 72, 505–516. [Google Scholar] [CrossRef]
- OEPP/EPPO. Guidelines for the Biological Evaluation of Fungicides: Plasmopara viticola. Bulletin OEPP/EPPO 2002, 31, 315–318. [Google Scholar]
- IBM Corp. IBM SPSS Statistics for Windows, Version 25.0; IBM Corp: Armonk, NY, USA, 2017. [Google Scholar]
- Acevedo-Opazo, C.; Tisseyre, B.; Guillaume, S.; Ojeda, H. The potential of high spatial resolution information to define within-vineyard zones related to vine water status. Precis. Agric. 2008, 9, 285–302. [Google Scholar] [CrossRef]
- Martinez-Casasnovas, J.; Agelet-Fernandez, J.; Arno, J.; Ramos, M. Analysis of vineyard differential management zones and relation to vine development, grape maturity and quality. Span. J. Agric. Res. 2012, 10, 326–337. [Google Scholar] [CrossRef]
- Bonilla, I.; Martínez de Toda, F.; Martínez-Casasnovas, J.A. Vine vigor, yield and grape quality assessment by airborne remote sensing over three years: Analysis of unexpected relationships in cv. Tempranillo. Span. J. Agric. Res. 2015, 13. [Google Scholar] [CrossRef]
- Kazmierski, M.; Glemas, P.; Rousseau, J.; Tisseyre, B. Temporal stability of within-field patterns of NDVI in non-irrigated Mediterranean vineyards. J. Int. Sci. Vigne Vin 2011, 45, 61–73. [Google Scholar] [CrossRef]
- Montero, F.J.; Meliá, J.; Brasa, A.; Segarra, D.; Cuesta, A.; Lanjeri, S. Assessment of vine development according to available water resources by using remote sensing in La Mancha, Spain. Agric. Water Manag. 1999, 40, 363–375. [Google Scholar] [CrossRef]
- Hørfarter, R.; Thorsted, M.D.; Stougård, K.; Poulsen, H.V. Precision spraying by combining a variable rate application map with an on/off map. Precision agriculture ’19. In Proceedings of the 12th European Conference on Precision Agriculture, Montpellier, France, 8–11 July 2019; pp. 53–59. [Google Scholar] [CrossRef]
- Zhang, N.; Wang, M.; Wang, N. Precision agriculture—A worldwide overview. Comput. Electron. Agric. 2002, 6, 113–132. [Google Scholar] [CrossRef]
- Arnó, J.; Martínez-Casasnovas, J.A.; Ribes-Dasi, M.; Rosell, J.R. Review. Precision Viticulture. Research topics, challenges and opportunities in site-specific vineyard management. Span. J. Agric. Res 2009, 7, 779–790. [Google Scholar]
- Chen, Y.; Ozkan, H.E.; Zhu, H.; Derk sen, R.C.; Krause, C.R. Spray de position in side tree canopies from a newly developed variable-rate air-assisted sprayer. Trans. ASABE 2013, 56, 1263–1272. [Google Scholar]
- Solanelles, F.; Escolà, A.; Planas, S.; Rosell, J.; Camp, F.; Gràcia, F. An electronic control system for pesticide application proportional to the canopy width of tree crops. Biosyst. Eng. 2006, 95, 473–481. [Google Scholar] [CrossRef]
- Gil, E.; Escolà, A.; Rosell, J.; Planas, S.; Val, L. Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Prot. 2007, 26, 1287–1297. [Google Scholar] [CrossRef]
- Balsari, P.; Doruchowski, G.; Marucco, P.; Tamagnone, M.; Van De Zande, J.; Wenneker, M. A system for adjusting the spray application to the target characteristics. Agric. Eng. Int. CIGR J. 2008, 10, 1–11. [Google Scholar]
- Carrara, M.; Comparetti, A.; Febo, P.; Orlando, S. Spatially variable rate herbicide application on Durum wheat in Sicily. Biosyst. Eng. 2004, 87, 387–392. [Google Scholar] [CrossRef]
- Balan, M.G.; Saab, O.J.G.A.; Ecker, A.E.A.; Migliorini, G.O. Description of the Application Method in Technical and Scientific Work on Insecticides. Acta Sci. Agron. 2016, 38, 9–17. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parcel | Variety | Treatment | Area (ha) | X coord. (m) | Y coord. (m) | Reference System |
|---|---|---|---|---|---|---|
| 1 | Chardonnay | VRA | 2.35 | 392,194 | 4,587,999 | ETRS 89 UTM31 |
| 2 | Merlot | VRA | 2.97 | 392,234 | 4,587,843 | |
| 3 | C. Sauvignon | VRA | 1.53 | 391,856 | 4,588,055 | |
| 4 | C. Sauvignon | VRA | 3.14 | 391,744 | 4,588,107 | |
| 5 | Chardonnay | CONV | 1.33 | 391,794 | 4,587,929 | |
| 6 | Merlot | CONV | 2.49 | 392,269 | 4,587,700 | |
| 7 | C. Sauvignon | CONV | 3.84 | 391,361 | 4,587,908 |
| LEAF AFFECTATION (%) | CATEGORY |
|---|---|
| 0 | 1 |
| <5 | 2 |
| 5–10 | 3 |
| 10–25 | 4 |
| 25–50 | 5 |
| 50–75 | 6 |
| >75 | 7 |
| Flight Date | 1 (Chardonnay) | 2 (Merlot) | 3 (C. Sauvignon) | 4 (C. Sauvignon) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L | M | H | L | M | H | L | M | H | L | M | H | |
| May 9th | 11.8 | 71.0 | 17.2 | 13.9 | 63.9 | 22.2 | 8.7 | 68.1 | 23.2 | 20.7 | 71.1 | 8.2 |
| June 11st | 20.4 | 66.0 | 13.6 | 24.2 | 56.2 | 19.6 | 24.6 | 65.2 | 10.2 | 18.5 | 59.8 | 21.7 |
| July 2nd | 18.1 | 55.2 | 26.7 | 50.9 | - | 49.1 | 24.6 | 45.7 | 29.7 | 27.4 | 48.0 | 24.6 |
| Application Date | Parameters | 1 (Chardonnay) | 2 (Merlot) | 3 (C. Sauvignon) | 4 (C. Sauvignon) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Low | Medium | High | Low | Medium | High | Low | Medium | High | Low | Medium | High | ||
| (a) | |||||||||||||
| May 24th BBCH 61 (CH) 60 (CS-MT) | High (m) | 0.65 | 0.76 | 1.01 | 0.50 | 0.63 | 0.74 | 0.45 | 0.68 | 0.85 | 0.71 | 0.73 | 0.79 |
| Width (m) | 0.37 | 0.44 | 0.51 | 0.31 | 0.38 | 0.43 | 0.28 | 0.39 | 0.38 | 0.55 | 0.55 | 0.65 | |
| Volume (L ha−1) | 185 * | 250 * | 310 * | 137 | 160 | 190 | 154 * | 185 * | 220 * | 216 * | 254 * | 291 * | |
| Nozzles (Color & nº) | Brown (6) | Brown (6) | Brown (6) | Brown (6) | |||||||||
| Pressure (bar) | 5.7 | 10.3 | 15.9 | 6.7 | 9.1 | 12.8 | 7.0 | 10.1 | 14.2 | 7.7 | 10.7 | 14.0 | |
| June 1st BBCH 69 (CH) 61 (CS-MT) | High (m) | 0.94 | 0.99 | 1.22 | 0.73 | 0.82 | 0.83 | 0.82 | 0.98 | 1.09 | 0.96 | 0.99 | 1.11 |
| Width (m) | 0.45 | 0.45 | 0.47 | 0.38 | 0.38 | 0.42 | 0.35 | 0.43 | 0.43 | 0.48 | 0.49 | 0.51 | |
| Volume (L ha−1) | 278 | 309 | 371 | 216 | 247 | 278 | 247 | 309 | 340 | 278 | 309 | 340 | |
| Nozzles (Color & nº) | Yellow (6) | Yellow (6) | Brown (4) Orange (4) | Yellow (8) | |||||||||
| Pressure (bar) | 7.1 | 8.8 | 12.8 | 7.6 | 10.0 | 12.7 | 8.3 | 13.1 | 15.9 | 7.1 | 8.8 | 10.7 | |
| June 6th BBCH 75 (CH) 69 (CS-MT) | High (m) | 0.92 | 1.08 | 1.10 | 0.79 | 0.73 | 0.87 | 0.85 | 1.13 | 1.14 | 1.06 | 1.04 | 1.29 |
| Width (m) | 0.50 | 0.45 | 0.57 | 0.47 | 0.50 | 0.87 | 0.41 | 0.48 | 0.51 | 0.52 | 0.49 | 0.53 | |
| Volume (L ha−1) | 309 | 377 | 444 | 206 | 247 | 278 | 206 | 283 | 315 | 286 | 336 | 437 | |
| Nozzles (Color & nº) | Yellow (6) Orange (2) | Yellow (6) | Brown (4) Yellow (4) | Yellow (6) Orange (2) | |||||||||
| Pressure (bar) | 7.4 | 11.2 | 15.6 | 6.9 | 10.0 | 12.7 | 5.7 | 10.9 | 13.6 | 6.3 | 8.8 | 15.1 | |
| June 20th BBCH 77 (CH) 75 (CS-MT) | High (m) | 0.92 | 1.11 | 1.27 | 0.76 | 0.88 | 1.07 | 0.88 | 1.03 | 1.35 | 0.92 | 1.08 | 1.26 |
| Width (m) | 0.37 | 0.44 | 0.48 | 0.35 | 0.35 | 0.42 | 0.34 | 0.4 | 0.54 | 0.37 | 0.38 | 0.45 | |
| Volume (L ha−1) | 257 | 315 | 372 | 229 | 257 | 315 | 257 | 315 | 372 | 257 | 286 | 437 | |
| Nozzles (Color & nº) | Yellow (8) | Brown (4) Yellow (4) | Yellow (8) | Yellow (6) Orange (2) | |||||||||
| Pressure (bar) | 6.0 | 9.2 | 12.8 | 7.1 | 9.0 | 13.6 | 6.0 | 9.2 | 12.8 | 5.1 | 6.3 | 15.1 | |
| (b) | |||||||||||||
| July 2nd BBCH 79 (CH) 77 (CS-MT) | High (m) | 0.94 | 1.01 | 1.16 | 0.86 | 0.98 | 1.07 | 0.94 | 1.11 | 1.31 | 1.06 | 1.20 | 1.31 |
| Width (m) | 0.36 | 0.41 | 0.45 | 0.40 | 0.42 | 0.48 | 0.38 | 0.39 | 0.42 | 0.33 | 0.34 | 0.38 | |
| Volume (L ha−1) | 257 | 286 | 343 | 257 | 286 | 315 | 257 | 315 | 372 | 315 | 343 | 372 | |
| Nozzles (Color & nº) | Brown (2) Yellow (6) | Brown (2) Yellow (6) | Yellow (8) | Yellow (8) | |||||||||
| Pressure (bar) | 7.4 | 9.2 | 13.3 | 7.4 | 9.2 | 11.2 | 6.0 | 9.2 | 12.8 | 9.2 | 10.9 | 12.8 | |
| July 12th BBCH 81 (CH) 79 (CS-MT) | High (m) | 0.89 | 1.01 | 1.10 | 0.79 | - | 1.06 | 0.88 | 1.09 | 1.29 | 0.92 | 1.11 | 1.25 |
| Width (m) | 0.38 | 0.43 | 0.52 | 0.43 | - | 0.53 | 0.36 | 0.39 | 0.47 | 0.34 | 0.36 | 0.42 | |
| Volume (L ha−1) | 257 | 286 | 372 | 230 | - | 370 | 257 | 286 | 372 | 257 | 315 | 343 | |
| Nozzles (Color & nº) | Yellow (8) | Brown (2) Yellow (6) | Yellow (8) | Yellow (8) | |||||||||
| Pressure (bar) | 6.0 | 7.5 | 12.8 | 5.8 | - | 15.6 | 6.0 | 7.5 | 12.8 | 6.0 | 9.2 | 10.9 | |
| July 20th BBCH 83 (CH) 81 (CS-MT) | High (m) | 0.83 | 0.99 | 1.06 | 0.79 | - | 1.03 | 0.87 | 1.03 | 1.26 | 0.89 | 1.09 | 1.20 |
| Width (m) | 0.37 | 0.44 | 0.46 | 0.40 | - | 0.52 | 0.37 | 0.41 | 0.53 | 0.33 | 0.36 | 0.43 | |
| Volume (L ha−1) | 229 | 286 | 315 | 229 | - | 336 | 257 | 286 | 400 | 257 | 315 | 343 | |
| Nozzles (Color & nº) | Brown (4) Yellow (4) | Brown (2) Yellow (6) | Yellow (8) | Yellow (8) | |||||||||
| Pressure (bar) | 7.1 | 11.2 | 13.6 | 5.8 | - | 12.8 | 6.0 | 7.5 | 14.9 | 6.0 | 9.2 | 10.9 | |
| Application Date | 1 (Chardonnay) | 2 (Merlot) | 3 (C. Sauvignon) | 4 (C. Sauvignon) |
|---|---|---|---|---|
| May 24th | 53.8 | 69.3 | 70.7 | 78.8 |
| June 1st | 75.2 | 81.8 | 78.7 | 82.2 |
| June 6th | 87.4 | 82.0 | 84.6 | 71.7 |
| June 20th | 77.4 | 81.5 | 74.4 | 68.2 |
| July 2nd | 75.0 | 84.3 | 56.6 | 75.2 |
| July 12th | 79.0 | 78.9 | 80.4 | 84.8 |
| July 20th | 83.5 | 78.0 | 79.3 | 81.9 |
| Application Date | 1 (Chardonnay) | 2 (Merlot) | 3 (C. Sauvignon) | 4 (C. Sauvignon) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Low | Medium | High | Low | Medium | High | Low | Medium | High | Low | Medium | High | |
| May 24th | 23 ± 2.2 | 14 ± 1.3 | 12 ± 2.4 | 32 ± 3.9 | 26 ± 5.8 | 20 ± 4.4 | 35 ± 2.0 | 38 ± 6.4 | 48 ± 5.6 | 38 ± 3.9 | 43 ± 5.8 | 42 ± 3.1 |
| June 1st | 29 ± 2.1 | 42 ± 2.7 | 39 ± 4.7 | - | 29 ± 6.6 | 37 ± 6.9 | 61 ± 6.6 | 42 ± 8.2 | 41 ± 4.5 | 41 ± 4.7 | 43 ± 4.7 | 47 ± 3.3 |
| June 6th | 64 ± 5.5 | 95 ± 1.8 | 71 ± 5.4 | 30 ± 1.2 | 30 ± 3.7 | 25 ± 4.1 | 33 ± 2.0 | 37 ± 3.2 | 28 ± 2.7 | 30 ± 5.3 | 31 ± 6.3 | 50 ± 1.8 |
| June 20th | 42 ± 7.1 | 37 ± 6.6 | 40 ± 3.9 | 30 ± 2.5 | 30 ± 8.6 | 33 ± 4.9 | 31 ± 2.3 | 34 ± 4.2 | 25 ± 2.4 | 28 ± 5.0 | 35 ± 2.3 | 40 ± 4.0 |
| July 2nd | 52 ± 4.5 | 80 ± 7.3 | 67 ± 2.7 | 29 ± 3.4 | 31 ± 6.0 | 27 ± 4.0 | 36 ± 9.8 | 29 ± 2.3 | 19 ± 4.0 | 30 ± 7.7 | 27 ± 2.8 | 32 ± 4.6 |
| July 12th | 29 ± 4.5 | 31 ± 1.5 | 38 ± 5.2 | 23 ± 1.1 | - | 31 ± 1.3 | 27 ± 5.5 | 25 ± 5.1 | 24 ± 9.0 | 25 ± 2.0 | 29 ± 1.1 | 26 ± 3.4 |
| July 20th | 28 ± 1.9 | 32 ± 1.4 | 35 ± 4.9 | 23 ± 3.7 | - | 27 ± 3.3 | 39 ± 3.3 | 33 ± 6.1 | 35 ± 4.8 | 35 ± 2.8 | 29 ± 1.7 | 27 ± 4.9 |
| Sampling Date | Indexes | 1 (CH) VRA | 5 (CH) CONV | 2 (MT) VRA | 6 (MT) CONV | 3 (CS) VRA | 4 (CS) VRA | 7 (CS) CONV |
|---|---|---|---|---|---|---|---|---|
| July 5th BBCH: 79 (CH); 77 (CS-MT) | Incidence | 11.6 | 30.8 | 10.0 | 12.5 | 7.6 | 4.5 | 26.1 |
| Degree infestation | 17.3 | 20.3 | 15.7 | 16.1 | 15.4 | 14.9 | 18.5 | |
| July 31st BBCH: 85 (CH-CS-MT) | Incidence | 11.3 | 17.3 | 23.0 | 13.6 | 12.1 | 4.5 | 15.2 |
| Degree infestation | 16.4 | 17.0 | 18.7 | 17.2 | 16.0 | 14.9 | 17.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Campos, J.; Gallart, M.; Llop, J.; Ortega, P.; Salcedo, R.; Gil, E. On-Farm Evaluation of Prescription Map-Based Variable Rate Application of Pesticides in Vineyards. Agronomy 2020, 10, 102. https://doi.org/10.3390/agronomy10010102
Campos J, Gallart M, Llop J, Ortega P, Salcedo R, Gil E. On-Farm Evaluation of Prescription Map-Based Variable Rate Application of Pesticides in Vineyards. Agronomy. 2020; 10(1):102. https://doi.org/10.3390/agronomy10010102
Chicago/Turabian StyleCampos, Javier, Montserrat Gallart, Jordi Llop, Paula Ortega, Ramón Salcedo, and Emilio Gil. 2020. "On-Farm Evaluation of Prescription Map-Based Variable Rate Application of Pesticides in Vineyards" Agronomy 10, no. 1: 102. https://doi.org/10.3390/agronomy10010102
APA StyleCampos, J., Gallart, M., Llop, J., Ortega, P., Salcedo, R., & Gil, E. (2020). On-Farm Evaluation of Prescription Map-Based Variable Rate Application of Pesticides in Vineyards. Agronomy, 10(1), 102. https://doi.org/10.3390/agronomy10010102