
Recent Advancements in Rubber Composites for Physical Activity Monitoring Sensors: A Critical Review



Abstract
1. Introduction
- [i]
- Carbon black: Carbon black is a fine black product obtained from the incomplete combustion of heavy petroleum. It is widely acknowledged that carbon black can reinforce rubber matrix and has thus been used as filler for more than a century [30]. It is widely used in tires and strain sensors due to its high reinforcing and electrical properties. The main properties of carbon black are small particle size, high surface area, and favorable surface chemistry. These properties can be detailed as the particle size of carbon black ranges from 10 to 500 nm [31]. The smaller the particle size, the better the reinforcement offered to the rubber matrix. Similarly, the larger surface area provides better reinforcing properties by improving the filler–rubber interfacial area. Similarly, the higher structure carbon blacks have more branches and voids that result in improved properties like reinforcing properties and electrical and thermal properties [32]. Moreover, the oxygen-carrying functional groups simulate its surface activity. This activity is enhanced by interfacial interactions between filler and rubber matrix. Carbon black has various applications as a reinforcing agent in tires, strain sensors, and automotive components like vibration-damping components [33,34]. Overall, carbon black plays a crucial role in enhancing the reinforcing properties of the rubber matrix, making it useful for various applications like automotive or strain sensing.
- [ii]
- Graphene: Graphene is a single layer of sp2 hybridized carbon atoms arranged in a two-dimensional honeycomb lattice. Graphene is also known as the mother of all carbon allotropic forms like carbon nanotube and graphite [35]. It is well known for its wonderful mechanical, electrical, and thermal properties. These unique properties make it an ideal filler candidate to make the rubber matrix useful for strain-sensing applications [36]. For example, the addition of graphene in rubber matrix composites makes them ultra-strong and able to withstand high mechanical deformation. Their high electrical properties also make them useful for superior electrical conductivity. This is due to high electron mobility of graphene [37]. For sensor applications, the piezoresistive effect and short response time of graphene enhance the strain sensitivity. This allows them to detect even minor stimuli. Graphene provides fatigue resistance and promotes repeated bending and stretching without performance degradation [38]. Moreover, graphene also reduces noise and improves the accuracy of strain measurements, thereby making the strain sensor robust and exhibit high performance. This noise can be mechanical, electrical, material-inherent, or contact noise. Here, the mechanical noise can be sourced from mechanical vibrations and shocks, thereby leading to unstable energy outputs. Then, electrical noise is due to internal parasitic components in the sensor, and it distorts output signal integrity. Then, the material-inherent noise is sourced from non-uniform filler dispersion for composite-based sensors. This type of noise can lead to inconsistent signal generation or random charging during loading/de-loading cycles. Finally, the contact noise originates from a variable contact area, pressure, or surface property under cyclic mechanical deformations. These composites have various applications, such as health monitoring, wearable electronics, and robotics [39]. Therefore, adding graphene to strain sensors paves the way for innovative applications in various fields, including structural health monitoring.
- [iii]
- Carbon nanotubes: Carbon nanotubes with cylindrical morphology are also known as robust fillers used in reinforcing rubber matrix. They can be single-wall (SWCNT) or multi-wall carbon nanotubes (MWCNT). When added to a rubber matrix, the carbon nanotubes offer a great combination of mechanical, electrical, and thermal properties [40]. Therefore, the carbon nanotubes enhance the performance and sensitivity of strain sensors, enabling their use in various advanced applications. Moreover, these carbon nanotubes exhibit a high aspect ratio, i.e., high length-to-diameter ratio. This high value helps enhance interaction with the polymer matrix and improves load transfer [41]. The role of carbon nanotubes used in strain sensing involves improved sensitivity. This is based on short response time, high durability, signal stability and high flexibility. These factors can be understood as the networks of carbon nanotubes in rubber matrix altering under mechanical strain, altering the resistance and improving the detection of even small deformations [42]. The carbon nanotubes improve mechanical properties and ensure that sensors can withstand repeated bending and stretching cycles that are crucial for robust wearable applications.
- [iv]
- Carbon nanofibers: Carbon nanofibers are also cylindrical in morphology like carbon nanotubes, with a diameter ranging from 10–100 nm and lengths up to several micrometers. Therefore, they have a large aspect ratio with the combined properties of carbon nanotubes and traditional carbon fibers [45]. Their properties include high tensile strength, thereby contributing strong mechanical reinforcement to the rubber matrix. Moreover, they offer an optimum balance to strength, flexibility, and stretchability. These are critical for strain-sensing measurements [46]. Carbon nanofibers also offer high electrical conductivity, thereby contributing a strong piezoresistive effect that is crucial for strain sensing. Thus, the change in resistance is critical under the change in mechanical strain, enabling high sensitivity for strain sensors [47]. Moreover, the high thermal conductivity of carbon nanofibers makes them ideal for heat dissipation in rubber composite under mechanical strain [48]. Therefore, carbon nanofibers make the composites thermally stable under large mechanical deformations. As discussed already, carbon fibers have a great impact on strain sensitivity when used in sensing applications. Some other crucial prospects are enhanced piezoresistive sensitivity, high durability, and electrical signal stability [49]. Therefore, they are important for applications such as structural health monitoring, wearable electronics, and robotics.
- [v]
- Fullerenes: Fullerenes are a well-known form of carbon in which the carbon atoms are arranged in spherical, ellipsoidal, or tubular structure. The most commonly studied fullerene is C60, a molecule that is composed of 60 carbon atoms arranged in a hollow sphere [50]. Fullerenes offer properties that make them useful for various advanced applications, such as strain sensors. For example, a fullerene with a robust structure helps composites achieve high mechanical strength due to their stable and symmetrical structure [51]. Like other carbon forms, fullerenes offer a good piezoresistive effect, making them suitable for sensing applications. In other cases, fullerenes can be chemically modified to improve their compatibility with different polymer matrices. This process helps in improving their dispersion and interaction within the composite material [52]. From a sensing perspective, fullerenes offer large strain detection that occurs from resistance change under mechanical strain. Moreover, they offer good mechanical reinforcement, flexibility, mechanical stability against fatigue, and noise reduction. The noise reduction and consistent signals help in obtaining error-free and more accurate data [53]. Therefore, their ability to improve sensitivity, durability, and signal stability. Also, they enable the development of flexible and miniaturized sensors, making them a valuable component in advancing strain sensor technology.
Critical Overview of Rubber Composite-Based Sensors
2. Filler Characterizations
2.1. Structural Features of the Carbon Nanomaterials

2.2. Structural Characterizations
3. Properties
3.1. Mechanical Properties
3.2. Electrical Properties
4. Applications
4.1. Physical Activity Monitoring Sensors Under Tensile and Compressive Strain
4.2. Sensing of Physical Activity Like Boxing
4.2.1. Overview of Deep Learning and Data Analytics for These Sensors
4.2.2. For Real-Time Monitoring for Boxing Sensor
4.3. Monitoring Human Motions Like Squatting, Walking, or Running
4.4. Self-Powered Energy Harvesting Under Different Mechanical Loads
4.5. Current–Voltage Curves, Real-Time Monitoring, and Durability of Composites
5. Conclusions
5.1. Advantages and Challenges
5.2. Future Prospects of the Composites
5.3. Overview of Cost-Effectiveness, Biocompatibility, and Scalability for These Sensors
- (a)
- Cost-effectiveness: For the sensors reviewed in this paper, a key advantage of rubber composite sensors is their potential for low-cost production. Generally, most of the materials, such as silicone rubber and polyurethane, are relatively inexpensive and abundant in nature. This makes the fabrication of these sensors at large scale feasible. Moreover, many commonly used conductive fillers (e.g., carbon black or graphite) offer a cost-effective option. These cheap fillers are alternatives to high-cost nanomaterials like graphene or metallic nanoparticles. However, cost challenges can arise when advanced fillers such as monolayer graphene or silver nanowires are used to achieve high performance. Another challenge is the use of complex fabrication techniques such as laser patterning and 3D printing. Overall, balancing performance with economic feasibility remains a central focus, especially for applications like single-use sensors.
- (b)
- Biocompatibility: This review summarizes the importance of biocompatibility for the use of these sensors for wearable applications. For example, biocompatibility is essential for applications involving direct contact with human skin or implantation. Many rubber matrices, such as medical-grade silicone and thermoplastic polyurethanes (TPUs), are inherently biocompatible and useful with low-to-no toxicity. Moreover, they have a long history of use in biomedical devices. The choice of fillers, however, significantly affects biocompatibility. For example, the carbon-based fillers like CNTs and graphene in higher concentrations could make the composite toxic. Low content of fillers generally shows acceptable biocompatibility when embedded in a stable matrix. However, concerns remain about potential cytotoxicity if the fillers are released due to material degradation. To overcome this challenge, encapsulation layers and surface treatments are often employed to mitigate for long-term safety.
- (c)
- Scalability: This review work gives insight into the prospects of scalability for these sensors. Here, the scalability is a major factor influencing the transition from research prototypes to market-ready products. Recently, simple processing techniques such as solution casting, screen printing, and roll-to-roll manufacturing have had a promising effect on scalability. For example, these techniques enabled the scalable production of rubber composite films and sensors. Therefore, these methods are well-suited for producing large-area or batch-fabricated devices. Nonetheless, challenges in maintaining uniform filler dispersion and ensuring integrating sensors into complex devices. These devices are useful as wearables or smart textiles and can limit scalability. Additionally, multi-step processes or post-fabrication treatments can increase complexity and reduce throughput.
5.4. Overview of Composite Sensors Compared to Alternatives Like Textile-Based or Capacitive Sensors
- (a)
- Composite sensor: The present review describes the use of composite-based nano-invasive sensors and their use to monitor physical activities. These composite sensors are made by combining two or more different materials. These materials contain polymers and electrically conductive fillers like carbon nanotubes, graphene, or metal particles. This review paper further insight that these composites-based sensors can sense physical changes. These physical activities can be running, jumping, or walking via the piezoresistive principle. For example, the pressure, strain, and temperature originate from physical activities, and the sensor performs the change through changes in electrical properties. The key features of these sensors include high flexibility, light weight, tunable sensitivity, and multimodal sensing. For example, the tuning of the sensitivity of these sensors can be performed through filler content. Moreover, their capacity for multimodal sensing involves their sensitivity to changes in pressure, strain, or temperature. Finally, their light weight makes them useful for soft and wearable applications. However, there are some limitations to these sensors, like uniform filler dispersion, signal draft, or hysteresis losses, and finally, the durability is a great issue.
- (b)
- Textile-based sensors: Textile sensors are greatly useful and made from conductive threads or coatings integrated into the fabrics. These sensors are also piezoresistive, where sensing is achieved through a change in resistance. The key features of these sensors are their seamless integration with garments, their light weight, and their ease of wearing. Due to these features, these sensors are comfortable to wear, scalable, washable, and washable. Moreover, they have high flexibility and are easy to fabricate. However, some challenges involve lower durability, higher sensitivity, and sensitivity to the environment. The sensitivity to the environment includes the change in temperature or humidity in the surrounding environment, which results in a change in resistance. Moreover, these sensors have limited multifunctionality and have less ability to detect multiple stimuli.
- (c)
- Capacitive sensors: Capacitive sensors work by studying change in capacitance caused by mechanical deformations. These types of sensors are frequently used in touchscreens and pressure sensors. The key features of these sensors include fast response time, high sensitivity, and moderate flexibility. The advantages of using these sensors include high precision, non-contact sensing, and low power consumption. Due to their low power consumption, these sensors are frequently useful for military applications. However, these sensors have some limitations, such as sensitivity to humidity, limited flexibility, and sensitivity to external noise. Moreover, these sensors have limited multimodal sensing, moderate durability, and moderate-to-tough fabrication processes.
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Javed, A.R.; Faheem, R.; Asim, M.; Baker, T.; Beg, M.O. A smartphone sensors-based personalized human activity recognition system for sustainable smart cities. Sustain. Cities Soc. 2021, 71, 102970. [Google Scholar] [CrossRef]
- Sousa Lima, W.; Souto, E.; El-Khatib, K.; Jalali, R.; Gama, J. Human activity recognition using inertial sensors in a smartphone: An overview. Sensors 2019, 19, 3213. [Google Scholar] [CrossRef] [PubMed]
- Zekavat, S.; Buehrer, R.M.; Durgin, G.D.; Lovisolo, L.; Wang, Z.; Goh, S.T.; Ghasemi, A. An overview on position location: Past, present, future. Int. J. Wirel. Inf. Netw. 2021, 28, 45–76. [Google Scholar] [CrossRef]
- Muhammad Sayem, A.S.; Hon Teay, S.; Shahariar, H.; Luise Fink, P.; Albarbar, A. Review on smart electro-clothing systems (SeCSs). Sensors 2020, 20, 587. [Google Scholar] [CrossRef]
- Ahsan, M.; Hon, S.T.; Albarbar, A. Development of novel big data analytics framework for smart clothing. IEEE Access 2020, 8, 146376–146394. [Google Scholar] [CrossRef]
- Meng, K.; Xiao, X.; Liu, Z.; Shen, S.; Tat, T.; Wang, Z.; Chen, J. Kirigami-inspired pressure sensors for wearable dynamic cardiovascular monitoring. Adv. Mater. 2022, 34, 2202478. [Google Scholar] [CrossRef]
- Taylor, J.L.; Bonikowske, A.R.; Olson, T.P. Optimizing outcomes in cardiac rehabilitation: The importance of exercise intensity. Front. Cardiovasc. Med. 2021, 8, 734278. [Google Scholar] [CrossRef]
- Qi, J.; Yang, P.; Newcombe, L.; Peng, X.; Yang, Y.; Zhao, Z. An overview of data fusion techniques for Internet of Things enabled physical activity recognition and measure. Inf. Fusion 2020, 55, 269–280. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, C.; Wu, X.; Ping, J.; Ying, Y. An integrated and robust plant pulse monitoring system based on biomimetic wearable sensor. NPJ Flex. Electron. 2022, 6, 43. [Google Scholar] [CrossRef]
- Tan, Y.; Liu, X.; Tang, W.; Chen, J.; Zhu, Z.; Li, L.; Li, H. Flexible pressure sensors based on bionic microstructures: From plants to animals. Adv. Mater. Interfaces 2022, 9, 2101312. [Google Scholar] [CrossRef]
- Nascimento, L.M.S.D.; Bonfati, L.V.; Freitas, M.L.B.; Mendes Junior, J.J.A.; Siqueira, H.V.; Stevan, S.L., Jr. Sensors and systems for physical rehabilitation and health monitoring—A review. Sensors 2020, 20, 4063. [Google Scholar] [CrossRef] [PubMed]
- Ye, S.; Feng, S.; Huang, L.; Bian, S. Recent progress in wearable biosensors: From healthcare monitoring to sports analytics. Biosensors 2020, 10, 205. [Google Scholar] [CrossRef] [PubMed]
- Giordano, M.R.; Malings, C.; Pandis, S.N.; Presto, A.A.; McNeill, V.; Westervelt, D.M.; Beekmann, M.; Subramanian, R. From low-cost sensors to high-quality data: A summary of challenges and best practices for effectively calibrating low-cost particulate matter mass sensors. J. Aerosol Sci. 2021, 158, 105833. [Google Scholar] [CrossRef]
- Ling, Y.; An, T.; Yap, L.W.; Zhu, B.; Gong, S.; Cheng, W. Disruptive, soft, wearable sensors. Adv. Mater. 2020, 32, 1904664. [Google Scholar] [CrossRef]
- Hu, P.; Madsen, J.; Skov, A.L. One reaction to make highly stretchable or extremely soft silicone elastomers from easily available materials. Nat. Commun. 2022, 13, 370. [Google Scholar] [CrossRef]
- Yang, W.; Lin, Y.; Zhu, Y.; Zhen, C.; Tao, W.; Luo, Y.; Wang, X. Synergistic effect of dual-modification strategy on thermal conductivity and thermal stability of h-BN/silicone rubber composites: Experiments and simulations. Int. Commun. Heat Mass Transf. 2025, 163, 108716. [Google Scholar] [CrossRef]
- Kosmela, P.; Sałasińska, K.; Kowalkowska-Zedler, D.; Barczewski, M.; Piasecki, A.; Saeb, M.R.; Hejna, A. Fire-Retardant Flexible Foamed Polyurethane (PU)-Based Composites: Armed and Charmed Ground Tire Rubber (GTR) Particles. Polymers 2024, 16, 656. [Google Scholar] [CrossRef]
- Kumar, V.; Lee, G.; Choi, J.; Lee, D.J. Studies on composites based on HTV and RTV silicone rubber and carbon nanotubes for sensors and actuators. Polymer 2020, 190, 122221. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, Z.; Liu, P.; Guo, X. A soft and stretchable electronics using laser-induced graphene on polyimide/PDMS composite substrate. npj Flex. Electron. 2022, 6, 26. [Google Scholar] [CrossRef]
- Guo, Y.; Qiu, H.; Ruan, K.; Wang, S.; Zhang, Y.; Gu, J. Flexible and insulating silicone rubber composites with sandwich structure for thermal management and electromagnetic interference shielding. Compos. Sci. Technol. 2022, 219, 109253. [Google Scholar] [CrossRef]
- Ullah, R.; Akbar, M.; Amin, S. Measuring electrical, thermal and mechanical properties of DC-stressed HTV silicone rubber loaded with nano/micro-fillers exposed to long-term aging. Appl. Nanosci. 2020, 10, 2101–2111. [Google Scholar] [CrossRef]
- Brook, M.A. Functional silicone oils and elastomers: New routes lead to new properties. Chem. Commun. 2023, 59, 12813–12829. [Google Scholar] [CrossRef]
- Haghshenas, N.; Nejat, A.; Seyedmehdi, S.A.; Ou, J.; Amirfazli, A.; Chini, S.F. Adhesion aspects of silicone rubber coatings for high voltage insulators: A critical review. Rev. Adhes. Adhes. 2021, 9, 434–480. [Google Scholar]
- Kumar, V.; Alam, M.N.; Park, S.S. Review of Recent Progress on Silicone Rubber Composites for Multifunctional Sensor Systems. Polymers 2024, 16, 1841. [Google Scholar] [CrossRef] [PubMed]
- Kumar, V.; Alam, M.N.; Park, S.S. Review on functionalized CNTs reinforced silicone rubber composites for potential wearable applications. Polym. Compos. 2024, 45, 12503–12529. [Google Scholar] [CrossRef]
- Wang, G.; Li, A.; Zhao, W.; Xu, Z.; Ma, Y.; Zhang, F.; He, Q. A review on fabrication methods and research progress of superhydrophobic silicone rubber materials. Adv. Mater. Interfaces 2021, 8, 2001460. [Google Scholar] [CrossRef]
- Hu, J.; Yu, J.; Li, Y.; Liao, X.; Yan, X.; Li, L. Nano carbon black-based high performance wearable pressure sensors. Nanomaterials 2020, 10, 664. [Google Scholar] [CrossRef]
- You, R.; Liu, Y.Q.; Hao, Y.L.; Han, D.D.; Zhang, Y.L.; You, Z. Laser fabrication of graphene-based flexible electronics. Adv. Mater. 2020, 32, 1901981. [Google Scholar] [CrossRef]
- Yan, T.; Wu, Y.; Yi, W.; Pan, Z. Recent progress on fabrication of carbon nanotube-based flexible conductive networks for resistive-type strain sensors. Sens. Actuators A Phys. 2021, 327, 112755. [Google Scholar] [CrossRef]
- Fan, Y.; Fowler, G.D.; Zhao, M. The past, present and future of carbon black as a rubber reinforcing filler–A review. J. Clean. Prod. 2020, 247, 119115. [Google Scholar] [CrossRef]
- Khodabakhshi, S.; Fulvio, P.F.; Andreoli, E. Carbon black reborn: Structure and chemistry for renewable energy harnessing. Carbon 2020, 162, 604–649. [Google Scholar] [CrossRef]
- Verma, A.; Baurai, K.; Sanjay, M.R.; Siengchin, S. Mechanical, microstructural, and thermal characterization insights of pyrolyzed carbon black from waste tires reinforced epoxy nanocomposites for coating application. Polym. Compos. 2020, 41, 338–349. [Google Scholar] [CrossRef]
- Dwivedi, C.; Manjare, S.; Rajan, S.K. Recycling of waste tire by pyrolysis to recover carbon black: Alternative & environment-friendly reinforcing filler for natural rubber compounds. Compos. Part B Eng. 2020, 200, 108346. [Google Scholar]
- Milone, G.; Vlachakis, C.; Tulliani, J.M.; Al-Tabbaa, A. Strain Monitoring of Concrete Using Carbon Black-Based Smart Coatings. Materials 2024, 17, 1577. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Manikkavel, A.; Song, M.; Lee, D.J.; Park, S.S. Silicone rubber composites reinforced by carbon nanofillers and their hybrids for various applications: A review. Polymers 2021, 13, 2322. [Google Scholar] [CrossRef]
- Irani, F.S.; Shafaghi, A.H.; Tasdelen, M.C.; Delipinar, T.; Kaya, C.E.; Yapici, G.G.; Yapici, M.K. Graphene as a piezoresistive material in strain sensing applications. Micromachines 2022, 13, 119. [Google Scholar] [CrossRef]
- Chen, L.; Li, N.; Yu, X.; Zhang, S.; Liu, C.; Song, Y.; Wang, Z. A general way to manipulate electrical conductivity of graphene. Chem. Eng. J. 2023, 462, 142139. [Google Scholar] [CrossRef]
- Jen, Y.M.; Ni, W.L. Effect of dispersing multiwalled carbon nanotubes and graphene nanoplatelets hybrids in the matrix on the flexural fatigue properties of carbon/epoxy composites. Polymers 2022, 14, 918. [Google Scholar] [CrossRef]
- Farooq, A.S.; Zhang, P. A comprehensive review on the prospects of next-generation wearable electronics for individualized health monitoring, assistive robotics, and communication. Sens. Actuators A Phys. 2022, 344, 113715. [Google Scholar] [CrossRef]
- Nurazzi, N.M.; Sabaruddin, F.A.; Harussani, M.M.; Kamarudin, S.H.; Rayung, M.; Asyraf, M.R.M.; Aisyah, H.A.; Norrrahim, M.N.F.; Ilyas, R.A.; Abdullah, N.; et al. Mechanical performance and applications of cnts reinforced polymer composites—A review. Nanomaterials 2021, 11, 2186. [Google Scholar] [CrossRef]
- Banerjee, S.; Kar, K.K. Characteristics of carbon nanotubes. In Handbook of Nanocomposite Supercapacitor Materials I: Characteristics; Springer: Berlin/Heidelberg, Germany, 2020; pp. 179–214. [Google Scholar]
- Dong, W.; Peng, S.; Wang, K.; Huang, Y.; Shi, L.; Wu, F.; Li, W. Integrated triboelectric self-powering and piezoresistive self-sensing cementitious composites for intelligent civil infrastructure. Nano Energy 2025, 135, 110656. [Google Scholar] [CrossRef]
- Cardenas, J.A.; Andrews, J.B.; Noyce, S.G.; Franklin, A.D. Carbon nanotube electronics for IoT sensors. Nano Futures 2020, 4, 012001. [Google Scholar] [CrossRef]
- Deshmukh, M.A.; Jeon, J.Y.; Ha, T.J. Carbon nanotubes: An effective platform for biomedical electronics. Biosens. Bioelectron. 2020, 150, 111919. [Google Scholar] [CrossRef] [PubMed]
- Sharma, R.; Kar, K.K. Characteristics of carbon nanofibers. In Handbook of Nanocomposite Supercapacitor Materials I: Characteristics; Springer: Berlin/Heidelberg, Germany, 2020; pp. 215–245. [Google Scholar]
- Sengupta, D.; Chen, S.H.; Michael, A.; Kwok, C.Y.; Lim, S.; Pei, Y.; Kottapalli, A.G.P. Single and bundled carbon nanofibers as ultralightweight and flexible piezoresistive sensors. npj Flex. Electron. 2020, 4, 9. [Google Scholar] [CrossRef]
- Peng, S.; Wu, S.; Yu, Y.; Sha, Z.; Li, G.; Hoang, T.T.; Thai, M.T.; Do, T.N.; Chu, D.; Wang, C.H. Carbon nanofiber-reinforced strain sensors with high breathability and anisotropic sensitivity. J. Mater. Chem. A 2021, 9, 26788–26799. [Google Scholar] [CrossRef]
- Shi, S.; Mou, P.; Wang, D.; Li, X.; Teng, S.; Zhou, M.; Wang, G. Co/carbon nanofiber with adjustable size and content of Co nanoparticles for tunable microwave absorption and thermal conductivity. J. Mater. 2024, 10, 124–133. [Google Scholar] [CrossRef]
- Wang, B.; Yin, X.; Cheng, R.; Li, J.; Ying, G.; Chen, K. Compressible, superelastic and fatigue resistant carbon nanofiber aerogels derived from bacterial cellulose for multifunctional piezoresistive sensors. Carbon 2022, 199, 318–328. [Google Scholar] [CrossRef]
- Pan, Y.; Liu, X.; Zhang, W.; Liu, Z.; Zeng, G.; Shao, B.; Chen, M. Advances in photocatalysis based on fullerene C60 and its derivatives: Properties, mechanism, synthesis, and applications. Appl. Catal. B Environ. 2020, 265, 118579. [Google Scholar] [CrossRef]
- Kausar, A. Fullerene nanofiller reinforced epoxy nanocomposites—Developments, progress and challenges. Mater. Res. Innov. 2021, 25, 175–185. [Google Scholar] [CrossRef]
- Kausar, A. Potential of polymer/fullerene nanocomposites for anticorrosion applications in the biomedical field. J. Compos. Sci. 2022, 6, 394. [Google Scholar] [CrossRef]
- Tavakkolnia, I.; Jagadamma, L.K.; Bian, R.; Manousiadis, P.P.; Videv, S.; Turnbull, G.A.; Samuel, I.D.W.; Haas, H. Organic photovoltaics for simultaneous energy harvesting and high-speed MIMO optical wireless communications. Light Sci. Appl. 2021, 10, 41. [Google Scholar] [CrossRef] [PubMed]
- Andrew, J.J.; Dhakal, H.N. Sustainable biobased composites for advanced applications: Recent trends and future opportunities–A critical review. Compos. Part C Open Access 2022, 7, 100220. [Google Scholar] [CrossRef]
- Luo, Y.; Abidian, M.R.; Ahn, J.-H.; Akinwande, D.; Andrews, A.M.; Antonietti, M.; Bao, Z.; Berggren, M.; Berkey, C.A.; Bettinger, C.J.; et al. Technology roadmap for flexible sensors. ACS Nano 2023, 17, 5211–5295. [Google Scholar] [CrossRef] [PubMed]
- Demrozi, F.; Pravadelli, G.; Bihorac, A.; Rashidi, P. Human activity recognition using inertial, physiological and environmental sensors: A comprehensive survey. IEEE Access 2020, 8, 210816–210836. [Google Scholar] [CrossRef]
- Sun, F.; Zhu, Y.; Jia, C.; Zhao, T.; Chu, L.; Mao, Y. Advances in self-powered sports monitoring sensors based on triboelectric nanogenerators. J. Energy Chem. 2023, 79, 477–488. [Google Scholar] [CrossRef]
- Sahu, M.; Hajra, S.; Panda, S.; Rajaitha, M.; Panigrahi, B.K.; Rubahn, H.-G.; Mishra, Y.K.; Kim, H.J. Waste textiles as the versatile triboelectric energy-harvesting platform for self-powered applications in sports and athletics. Nano Energy 2022, 97, 107208. [Google Scholar] [CrossRef]
- Dong, C.; Zhao, R.; Yao, L.; Ran, Y.; Zhang, X.; Wang, Y. A review on WO3 based gas sensors: Morphology control and enhanced sensing properties. J. Alloys Compd. 2020, 820, 153194. [Google Scholar] [CrossRef]
- Kumar, V.; Wu, R.R.; Lee, D.J. Morphological aspects of carbon nanofillers and their hybrids for actuators and sensors. Polym. Compos. 2019, 40, E373–E382. [Google Scholar] [CrossRef]
- Alves, A.M.; Cavalcanti, S.N.; da Silva, M.P.; Freitas, D.M.; Agrawal, P.; de Mélo, T.J. Electrical, rheological, and mechanical properties copolymer/carbon black composites. J. Vinyl Addit. Technol. 2021, 27, 445–458. [Google Scholar] [CrossRef]
- Kumar, V.; Lee, D.J. Rubber nanocomposites reinforced with single-wall and multiwall carbon nanotubes for industrial applications. Rubber Chem. Technol. 2020, 93, 157–171. [Google Scholar] [CrossRef]
- Thiruvengadam, M.; Rajakumar, G.; Swetha, V.; Ansari, M.A.; Alghamdi, S.; Almehmadi, M.; Halawi, M.; Kungumadevi, L.; Raja, V.; Sarbudeen, S.S.; et al. Recent insights and multifactorial applications of carbon nanotubes. Micromachines 2021, 12, 1502. [Google Scholar] [CrossRef] [PubMed]
- Kumar, V.; Lee, G.; Singh, K.; Choi, J.; Lee, D.J. Structure-property relationship in silicone rubber nanocomposites reinforced with carbon nanomaterials for sensors and actuators. Sens. Actuators A Phys. 2020, 303, 111712. [Google Scholar] [CrossRef]
- Kumar, V.; Tang, X. New horizons in nanofiller-based polymer composites II. Polymers 2023, 15, 4259. [Google Scholar] [CrossRef]
- Sun, X.; Huang, C.; Wang, L.; Liang, L.; Cheng, Y.; Fei, W.; Li, Y. Recent progress in graphene/polymer nanocomposites. Adv. Mater. 2021, 33, 2001105. [Google Scholar] [CrossRef] [PubMed]
- Cao, C.-F.; Yu, B.; Guo, B.-F.; Hu, W.-J.; Sun, F.-N.; Zhang, Z.-H.; Li, S.-N.; Wu, W.; Tang, L.-C.; Song, P.; et al. Bio-inspired, sustainable and mechanically robust graphene oxide-based hybrid networks for efficient fire protection and warning. Chem. Eng. J. 2022, 439, 134516. [Google Scholar] [CrossRef]
- Wang, X.; Huang, S.C.; Hu, S.; Yan, S.; Ren, B. Fundamental understanding and applications of plasmon-enhanced Raman spectroscopy. Nat. Rev. Phys. 2020, 2, 253–271. [Google Scholar] [CrossRef]
- Li, Z.; Deng, L.; Kinloch, I.A.; Young, R.J. Raman spectroscopy of carbon materials and their composites: Graphene, nanotubes and fibres. Prog. Mater. Sci. 2023, 135, 101089. [Google Scholar] [CrossRef]
- Moseenkov, S.I.; Kuznetsov, V.L.; Zolotarev, N.A.; Kolesov, B.A.; Prosvirin, I.P.; Ishchenko, A.V.; Zavorin, A.V. Investigation of amorphous carbon in nanostructured carbon materials (A Comparative Study by TEM, XPS, Raman Spectroscopy and XRD). Materials 2023, 16, 1112. [Google Scholar] [CrossRef]
- Thapliyal, V.; Alabdulkarim, M.E.; Whelan, D.R.; Mainali, B.; Maxwell, J.L. A concise review of the Raman spectra of carbon allotropes. Diam. Relat. Mater. 2022, 127, 109180. [Google Scholar] [CrossRef]
- Roy, D.; Kanojia, S.; Mukhopadhyay, K.; Eswara Prasad, N. Analysis of carbon-based nanomaterials using Raman spectroscopy: Principles and case studies. Bull. Mater. Sci. 2021, 44, 31. [Google Scholar] [CrossRef]
- Kumar, V.; Kumar, A.; Lee, D.J.; Park, S.S. Estimation of number of graphene layers using different methods: A focused review. Materials 2021, 14, 4590. [Google Scholar] [CrossRef] [PubMed]
- Low, I.M.; Albetran, H.M.; Degiorgio, M. Structural characterization of commercial graphite and graphene materials. J. Nanotechnol. Nanomater. 2020, 1, 23–30. [Google Scholar]
- Saleem, H.; Haneef, M.; Abbasi, H.Y. Synthesis route of reduced graphene oxide via thermal reduction of chemically exfoliated graphene oxide. Mater. Chem. Phys. 2018, 204, 1–7. [Google Scholar] [CrossRef]
- Kumar, V.; Kumar, A.; Song, M.; Lee, D.J.; Han, S.S.; Park, S.S. Properties of silicone rubber-based composites reinforced with few-layer graphene and iron oxide or titanium dioxide. Polymers 2021, 13, 1550. [Google Scholar] [CrossRef]
- Zhang, W.; Chai, C.; Fan, Q.; Song, Y.; Yang, Y. PBCF-Graphene: A 2D Sp2 Hybridized Honeycomb Carbon Allotrope with a Direct Band Gap. ChemNanoMat 2020, 6, 139–147. [Google Scholar] [CrossRef]
- Kumar, P.; Divya, N.; Ratan, J.K. Study on the physico-chemical properties of reduced graphene oxide with different degrees of reduction temperature. J. Iran. Chem. Soc. 2021, 18, 201–211. [Google Scholar] [CrossRef]
- Liang, T.; Zhang, Z.; Ma, X.; Xiang, Y.; Huang, H.; Jiang, X. Characteristics of powdered layer on silicone rubber surface. J. Mater. Res. Technol. 2021, 14, 36–46. [Google Scholar] [CrossRef]
- Sarath, P.S.; Moni, G.; George, J.J.; Haponiuk, J.T.; Thomas, S.; George, S.C. A study on the influence of reduced graphene oxide on the mechanical, dynamic mechanical and tribological properties of silicone rubber nanocomposites. J. Compos. Mater. 2021, 55, 2011–2024. [Google Scholar] [CrossRef]
- Krishna, D.N.G.; Philip, J. Review on surface-characterization applications of X-ray photoelectron spectroscopy (XPS): Recent developments and challenges. Appl. Surf. Sci. Adv. 2022, 12, 100332. [Google Scholar] [CrossRef]
- Peng, C.; Zhang, X. Chemical functionalization of graphene nanoplatelets with hydroxyl, amino, and carboxylic terminal groups. Chemistry 2021, 3, 873–888. [Google Scholar] [CrossRef]
- Sun, F.; Yang, S.; Wang, Q. Selective decomposition process and mechanism of Si–O–Si cross-linking bonds in silane cross-linked polyethylene by solid-state shear milling. Ind. Eng. Chem. Res. 2020, 59, 12896–12905. [Google Scholar] [CrossRef]
- Chen, T.; Xie, Y.; Wang, Z.; Lou, J.; Liu, D.; Xu, R.; Xiao, X. Recent advances of flexible strain sensors based on conductive fillers and thermoplastic polyurethane matrixes. ACS Appl. Polym. Mater. 2021, 3, 5317–5338. [Google Scholar] [CrossRef]
- Zhou, J.; Guo, X.; Xu, Z.; Wu, Q.; Chen, J.; Wu, J.; Huang, Z. Highly sensitive and stretchable strain sensors based on serpentine-shaped composite films for flexible electronic skin applications. Compos. Sci. Technol. 2020, 197, 108215. [Google Scholar] [CrossRef]
- Kumar, V.; Lee, D.J.; Park, S.S. Multi-functionality prospects in functionalized and pristine graphene nanosheets reinforced silicone rubber composites: A focused review. FlatChem 2023, 41, 100535. [Google Scholar] [CrossRef]
- Kumar, V.; Parvin, N.; Manikkavel, A.; Lee, D.Y.; Mandal, T.K.; Joo, S.W.; Park, S.S. Improved interfacial mechanical strength and synergy in properties of nano-carbon black reinforced rubber composites containing functionalized graphite nanoplatelets. Surf. Interfaces 2023, 39, 102941. [Google Scholar] [CrossRef]
- Yang, R.; Zhang, W.; Tiwari, N.; Yan, H.; Li, T.; Cheng, H. Multimodal sensors with decoupled sensing mechanisms. Adv. Sci. 2022, 9, 2202470. [Google Scholar] [CrossRef]
- Wu, S.; Peng, S.; Yu, Y.; Wang, C.H. Strategies for designing stretchable strain sensors and conductors. Adv. Mater. Technol. 2020, 5, 1900908. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Yewale, M.A.; Park, S.S. Stretchable rubber composites with lower hysteresis losses, improved magnetic effect, and a robust magnetic sensitivity. Sens. Actuators A Phys. 2024, 373, 115425. [Google Scholar] [CrossRef]
- Manikkavel, A.; Kumar, V.; Park, S.S. Multifunctionality of MWCNT and TiC hybrid filler silicone composite for energy harvesting and strain sensing. Polym. Compos. 2024, 45, 6629–6643. [Google Scholar] [CrossRef]
- Duan, Y.; Zhang, L.; Tian, D.; Liao, S.; Wang, Y.; Xu, Y.; Hu, Y. Modulus matching strategy of ultra-soft electrically conductive silicone composites for high performance electromagnetic interference shielding. Chem. Eng. J. 2023, 472, 144934. [Google Scholar] [CrossRef]
- Schäfer, K.; Braun, T.; Riegg, S.; Musekamp, J.; Gutfleisch, O. Polymer-bonded magnets produced by laser powder bed fusion: Influence of powder morphology, filler fraction and energy input on the magnetic and mechanical properties. Mater. Res. Bull. 2023, 158, 112051. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, J.; Yang, H.; Wang, X.; Cai, Z.; Zhu, M. Effect of modulation of interfacial properties on the tribological properties of viscoelastic epoxy resin damping coatings. Polym. Test. 2021, 100, 107229. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Manikkavel, A.; Park, S.S. Efficacy of graphitic allotrope’s surface area in silicone rubber based composites for reverse piezo-electric actuation: Nano effect. Sens. Actuators A Phys. 2022, 336, 113411. [Google Scholar] [CrossRef]
- Chen, B.; Kondoh, K.; Li, J.S.; Qian, M.J.C.P.B.E. Extraordinary reinforcing effect of carbon nanotubes in aluminium matrix composites assisted by in-situ alumina nanoparticles. Compos. Part B Eng. 2020, 183, 107691. [Google Scholar] [CrossRef]
- Amoroso, L.; Heeley, E.L.; Ramadas, S.N.; McNally, T. Crystallisation behaviour of composites of HDPE and MWCNTs: The effect of nanotube dispersion, orientation and polymer deformation. Polymer 2020, 201, 122587. [Google Scholar] [CrossRef]
- Wang, P.; Wei, W.; Li, Z.; Duan, W.; Han, H.; Xie, Q. A superhydrophobic fluorinated PDMS composite as a wearable strain sensor with excellent mechanical robustness and liquid impalement resistance. J. Mater. Chem. A 2020, 8, 3509–3516. [Google Scholar] [CrossRef]
- Zhu, P.; Ou, H.; Kuang, Y.; Hao, L.; Diao, J.; Chen, G. Cellulose nanofiber/carbon nanotube dual network-enabled humidity sensor with high sensitivity and durability. ACS Appl. Mater. Interfaces 2020, 12, 33229–33238. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Azam, S.; Manikkavel, A.; Park, S.S. The tough and multi-functional stretchable device based on silicone rubber composites. Polym. Adv. Technol. 2023, 34, 2167–2178. [Google Scholar] [CrossRef]
- Li, Z.; Young, R.J.; Kinloch, I.A. Interfacial stress transfer in graphene oxide nanocomposites. ACS Appl. Mater. Interfaces 2013, 5, 456–463. [Google Scholar] [CrossRef]
- Jiao, B.; Chen, J.; Gong, M. Investigation of interfacial degradation mechanism and debonding behavior for degraded rubber asphalt-aggregate molecular system using a molecular dynamics method. J. Clean. Prod. 2024, 451, 142123. [Google Scholar] [CrossRef]
- Yang, B.; Wang, S.; Song, Z.; Liu, L.; Li, H.; Li, Y. Molecular dynamics study on the reinforcing effect of incorporation of graphene/carbon nanotubes on the mechanical properties of swelling rubber. Polym. Test. 2021, 102, 107337. [Google Scholar] [CrossRef]
- Mohd Nurazzi, N.; Muhammad Asyraf, M.R.; Khalina, A.; Abdullah, N.; Sabaruddin, F.A.; Kamarudin, S.H.; Ahmad, S.; Mahat, A.M.; Lee, C.L.; Aisyah, H.A.; et al. Fabrication, functionalization, and application of carbon nanotube-reinforced polymer composite: An overview. Polymers 2021, 13, 1047. [Google Scholar] [CrossRef] [PubMed]
- Ruth, S.R.A.; Beker, L.; Tran, H.; Feig, V.R.; Matsuhisa, N.; Bao, Z. Rational design of capacitive pressure sensors based on pyramidal microstructures for specialized monitoring of biosignals. Adv. Funct. Mater. 2020, 30, 1903100. [Google Scholar] [CrossRef]
- Hassanifard, S.; Behdinan, K. Fatigue response of multiscale extrusion-based additively manufactured acrylonitrile butadiene styrene-graphene nanoplatelets composites. Compos. Part B Eng. 2024, 279, 111464. [Google Scholar] [CrossRef]
- Chen, J.; Liu, J.; Yao, Y.; Chen, S. Effect of microstructural damage on the mechanical properties of silica nanoparticle-reinforced silicone rubber composites. Eng. Fract. Mech. 2020, 235, 107195. [Google Scholar] [CrossRef]
- Georgopoulou, A.; Clemens, F. Piezoresistive elastomer-based composite strain sensors and their applications. ACS Appl. Electron. Mater. 2020, 2, 1826–1842. [Google Scholar] [CrossRef]
- Wu, Y.; Yan, T.; Zhang, K.; Pan, Z. Flexible and anisotropic strain sensors based on highly aligned carbon fiber membrane for exercise monitoring. Adv. Mater. Technol. 2021, 6, 2100643. [Google Scholar] [CrossRef]
- Lincon, M.I.; Chalivendra, V. High strain rate damage sensing in intra-ply hybrid composites under dynamic shear loading. Int. J. Impact Eng. 2023, 173, 104439. [Google Scholar] [CrossRef]
- Peng, W.; Han, L.; Huang, H.; Xuan, X.; Pan, G.; Wan, L.; Pan, L. A direction-aware and ultrafast self-healing dual network hydrogel for a flexible electronic skin strain sensor. J. Mater. Chem. A 2020, 8, 26109–26118. [Google Scholar] [CrossRef]
- Yan, W.; Fuh, H.-R.; Lv, Y.; Chen, K.-Q.; Tsai, T.-Y.; Wu, Y.-R.; Shieh, T.-H.; Hung, K.-M.; Li, J.; Zhang, D.; et al. Giant gauge factor of Van der Waals material based strain sensors. Nat. Commun. 2021, 12, 2018. [Google Scholar] [CrossRef]
- Duan, L.; D’hooge, D.R.; Cardon, L. Recent progress on flexible and stretchable piezoresistive strain sensors: From design to application. Prog. Mater. Sci. 2020, 114, 100617. [Google Scholar] [CrossRef]
- Wan, C.; Zhang, L.; Yong, K.T.; Li, J.; Wu, Y. Recent progress in flexible nanocellulosic structures for wearable piezoresistive strain sensors. J. Mater. Chem. C 2021, 9, 11001–11029. [Google Scholar] [CrossRef]
- Gilanizadehdizaj, G.; Aw, K.C.; Stringer, J.; Bhattacharyya, D. Facile fabrication of flexible piezo-resistive pressure sensor array using reduced graphene oxide foam and silicone elastomer. Sens. Actuators A Phys. 2022, 340, 113549. [Google Scholar] [CrossRef]
- Wang, Z.; Cong, Y.; Fu, J. Stretchable and tough conductive hydrogels for flexible pressure and strain sensors. J. Mater. Chem. B 2020, 8, 3437–3459. [Google Scholar] [CrossRef]
- Song, F.; Chen, Q.; Zhang, M.; Jiang, Z.; Ding, W.; Yan, Z.; Zhu, H. Exploring the piezoresistive sensing behaviour of ultra-high performance concrete: Strategies for multiphase and multiscale functional additives and influence of electrical percolation. Compos. Part B: Eng. 2023, 267, 111042. [Google Scholar] [CrossRef]
- Tian, K.; Pan, Q.; Deng, H.; Fu, Q. Shear induced formation and destruction behavior of conductive networks in nickel/polyurethane composites during strain sensing. Compos. Part A Appl. Sci. Manuf. 2020, 130, 105757. [Google Scholar] [CrossRef]
- Lin, Y.; Yin, Q.; Wang, J.; Jia, H.; Yuan, G.; Wang, J. Sensitivity enhanced, highly stretchable, and mechanically robust strain sensors based on reduced graphene oxide-aramid nanofibers hybrid fillers. Chem. Eng. J. 2022, 443, 136468. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, X.; Liu, Y.; Liu, L.; Xu, Q.; Liu, H.; Chen, L. Ultra-stretchable monofilament flexible sensor with low hysteresis and linearity based on MWCNTs/Ecoflex composite materials. Macromol. Mater. Eng. 2021, 306, 2100113. [Google Scholar] [CrossRef]
- Guo, H.; Jerrams, S.; Xu, Z.; Zhou, Y.; Jiang, L.; Zhang, L.; Wen, S. Enhanced fatigue and durability of carbon black/natural rubber composites reinforced with graphene oxide and carbon nanotubes. Eng. Fract. Mech. 2020, 223, 106764. [Google Scholar] [CrossRef]
- Zhou, K.; Dai, K.; Liu, C.; Shen, C. Flexible conductive polymer composites for smart wearable strain sensors. SmartMat 2020, 1, e1010. [Google Scholar] [CrossRef]
- Li, Y.; Hong, J.; Zhang, J.; Yang, H.; Wang, H.; Ye, L.; Li, Y. Synergistically enhanced thermal conductivity, electrical insulation, and mechanical toughness of polymer composites with carbon nanofibers segregated by alumina nanoparticles. Compos. Part B Eng. 2025, 289, 111935. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, A.; Han, Y.; Li, T. Sensors based on conductive polymers and their composites: A review. Polym. Int. 2020, 69, 7–17. [Google Scholar] [CrossRef]
- Wang, J.; Li, Q.; Li, K.; Sun, X.; Wang, Y.; Zhuang, T.; Wang, H. Ultra-high electrical conductivity in filler-free polymeric hydrogels toward thermoelectrics and electromagnetic interference shielding. Adv. Mater. 2022, 34, 2109904. [Google Scholar] [CrossRef]
- Tan, L.; Yu, K.; Bashir, A.K.; Cheng, X.; Ming, F.; Zhao, L.; Zhou, X. Toward real-time and efficient cardiovascular monitoring for COVID-19 patients by 5G-enabled wearable medical devices: A deep learning approach. Neural Comput. Appl. 2021, 35, 13921–13934. [Google Scholar] [CrossRef]
- Averardi, A.; Cola, C.; Zeltmann, S.E.; Gupta, N. Effect of particle size distribution on the packing of powder beds: A critical discussion relevant to additive manufacturing. Mater. Today Commun. 2020, 24, 100964. [Google Scholar] [CrossRef]
- Aslanidis, E.; Skotadis, E.; Tsoukalas, D. Resistive crack-based nanoparticle strain sensors with extreme sensitivity and adjustable gauge factor, made on flexible substrates. Nanoscale 2021, 13, 3263–3274. [Google Scholar] [CrossRef]
- Coetzee, D.; Venkataraman, M.; Militky, J.; Petru, M. Influence of nanoparticles on thermal and electrical conductivity of composites. Polymers 2020, 12, 742. [Google Scholar] [CrossRef]
- Zhang, D.; Ren, B.; Zhang, Y.; Xu, L.; Huang, Q.; He, Y.; Zheng, J. From design to applications of stimuli-responsive hydrogel strain sensors. J. Mater. Chem. B 2020, 8, 3171–3191. [Google Scholar] [CrossRef]
- Penas, R.; Balmes, E.; Gaudin, A. A unified non-linear system model view of hyperelasticity, viscoelasticity and hysteresis exhibited by rubber. Mech. Syst. Signal Process. 2022, 170, 108793. [Google Scholar] [CrossRef]
- Alam, M.N.; Kumar, V.; Lee, D.J.; Park, S.S. Styrene–butadiene rubber-based nanocomposites toughened by carbon nanotubes for wide and linear electromechanical sensing applications. Polym. Compos. 2024, 45, 2485–2499. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Yewale, M.A.; Park, S.S. Great elastomer-based composites for robust and portable wearable sensors: A critical review. Sens. Actuators A Phys. 2025, 389, 116563. [Google Scholar] [CrossRef]
- Kumar, V.; Lee, D.J. Studies of nanocomposites based on carbon nanomaterials and RTV silicone rubber. J. Appl. Polym. Sci. 2017, 134, 44407. [Google Scholar] [CrossRef]
- Lee, J.Y.; Kumar, V.; Tang, X.W.; Lee, D.J. Mechanical and electrical behavior of rubber nanocomposites under static and cyclic strain. Compos. Sci. Technol. 2017, 142, 1–9. [Google Scholar] [CrossRef]
- Manikkavel, A.; Kumar, V.; Park, S.S. MWCNT-reinforced Silicone‘s Dual Response to Human and Mechanical Motion: Exploring Strain Sensing Behavior and Practical Applications. Colloids Surf. A Physicochem. Eng. Asp. 2024, 688, 133536. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Yewale, M.A.; Lee, D.J.; Park, S.S. Mimicking Self-Powered Piezoelectric Energy-Generating Behavior in Silicone Rubber Composites under Compressive and Tensile Strains. ACS Appl. Electron. Mater. 2024, 6, 1638–1650. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Yewale, M.A.; Park, S.S. Robust performance for composites using silicone rubber with different prospects for wearable electronics. Polym. Adv. Technol. 2024, 35, e6264. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Manikkavel, A.; Choi, J.; Lee, D.J. Investigation of silicone rubber composites reinforced with carbon nanotube, nanographite, their hybrid, and applications for flexible devices. J. Vinyl Addit. Technol. 2021, 27, 254–263. [Google Scholar] [CrossRef]
- Manikkavel, A.; Kumar, V.; Alam, M.N.; Kim, U.; Park, S.S. The electro-mechanical energy harvesting configurations in different modes from machine to self-powered wearable electronics. ACS Appl. Electron. Mater. 2023, 5, 5537–5554. [Google Scholar] [CrossRef]
- Wang, L.; Xu, T.; Fan, C.; Zhang, X. Wearable strain sensor for real-time sweat volume monitoring. IScience 2021, 24, 102028. [Google Scholar] [CrossRef]
- Yadav, A.; Yadav, N.; Wu, Y.; RamaKrishna, S.; Hongyu, Z. Wearable strain sensors: State-of-the-art and future applications. Mater. Adv. 2023, 4, 1444–1459. [Google Scholar] [CrossRef]
- Patel, V.; Chesmore, A.; Legner, C.M.; Pandey, S. Trends in workplace wearable technologies and connected-worker solutions for next-generation occupational safety, health, and productivity. Adv. Intell. Syst. 2022, 4, 2100099. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, K.; Xu, H.; Li, T.; Jin, Q.; Cui, D. Recent developments in sensors for wearable device applications. Anal. Bioanal. Chem. 2021, 413, 6037–6057. [Google Scholar] [CrossRef] [PubMed]
- Parvin, N.; Kumar, V.; Park, S.S.; Mandal, T.K.; Joo, S.W. Enhanced piezoelectric energy harvesting using hybrid composites of MWCNTs and partially-reduced GO in RTV-SR for stable voltage generation. Surf. Interfaces 2024, 44, 103681. [Google Scholar] [CrossRef]
- Chung, D.D.L. A critical review of piezoresistivity and its application in electrical-resistance-based strain sensing. J. Mater. Sci. 2020, 55, 15367–15396. [Google Scholar] [CrossRef]
- Ma, Z.; Zhang, Y.; Zhang, K.; Deng, H.; Fu, Q. Recent progress in flexible capacitive sensors: Structures and properties. Nano Mater. Sci. 2023, 5, 265–277. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Rab, S.; Singh, R.P.; Suman, R. Sensors for daily life: A review. Sens. Int. 2021, 2, 100121. [Google Scholar] [CrossRef]
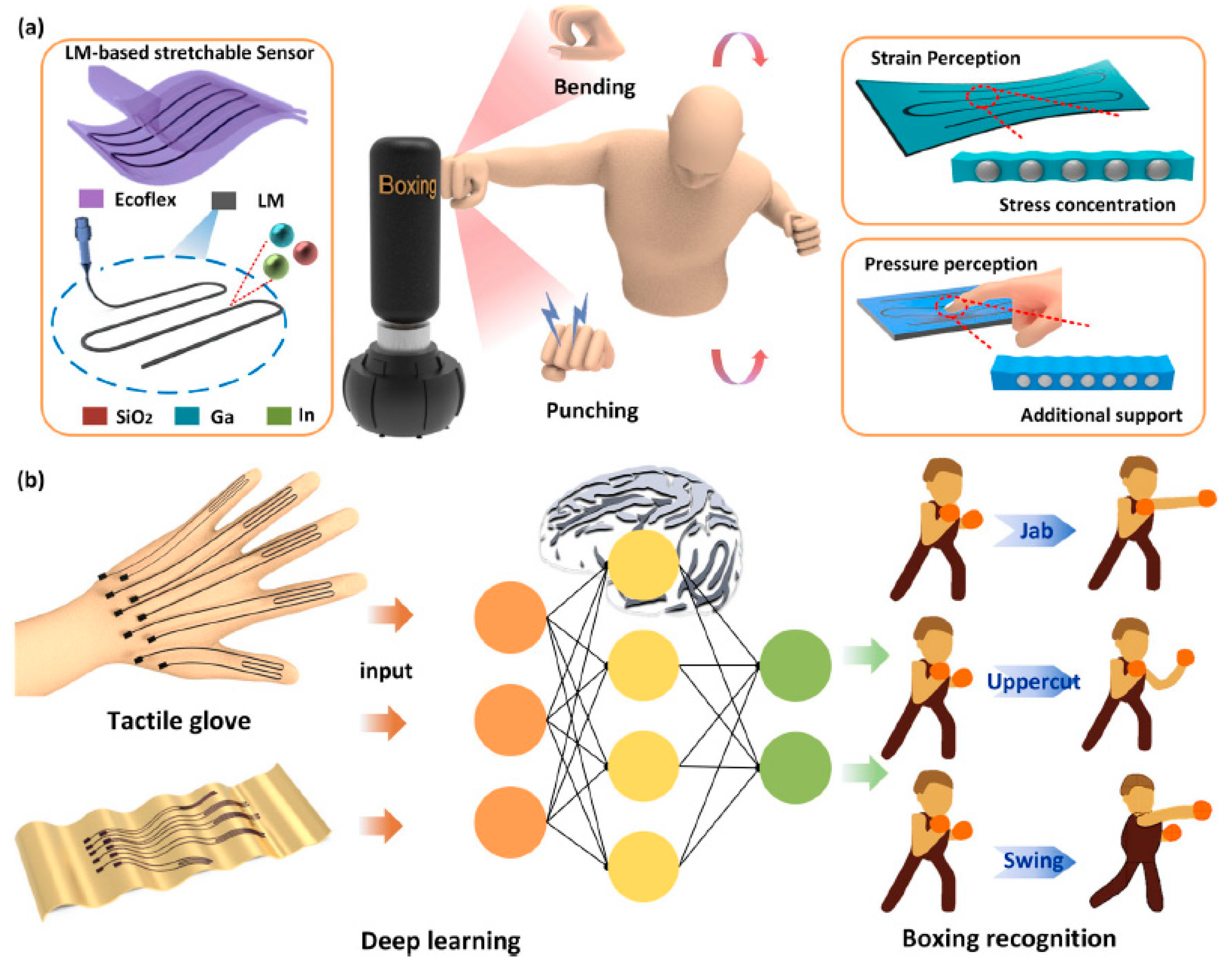
- Qiu, Y.; Zou, Z.; Zou, Z.; Setiawan, N.K.; Dikshit, K.V.; Whiting, G.; Yang, F.; Zhang, W.; Lu, J.; Zhong, B.; et al. Deep-learning-assisted printed liquid metal sensory system for wearable applications and boxing training. npj Flex. Electron. 2023, 7, 37. [Google Scholar] [CrossRef]
- Malekloo, A.; Ozer, E.; AlHamaydeh, M.; Girolami, M. Machine learning and structural health monitoring overview with emerging technology and high-dimensional data source highlights. Struct. Health Monit. 2022, 21, 1906–1955. [Google Scholar] [CrossRef]
- Luo, J.; Gao, W.; Wang, Z.L. The triboelectric nanogenerator as an innovative technology toward intelligent sports. Adv. Mater. 2021, 33, 2004178. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Youssef, A. Inertial sensors technologies for navigation applications: State of the art and future trends. Satell. Navig. 2020, 1, 2. [Google Scholar] [CrossRef]
- Ponciano, V.; Pires, I.M.; Ribeiro, F.R.; Marques, G.; Villasana, M.V.; Garcia, N.M.; Zdravevski, E.; Spinsante, S. Identification of diseases based on the use of inertial sensors: A systematic review. Electronics 2020, 9, 778. [Google Scholar] [CrossRef]
- Rana, M.; Mittal, V. Wearable sensors for real-time kinematics analysis in sports: A review. IEEE Sens. J. 2020, 21, 1187–1207. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, Y.; Zhang, L.; Zhou, J.; Lu, A. Transparent, ultra-stretching, tough, adhesive carboxyethyl chitin/polyacrylamide hydrogel toward high-performance soft electronics. Nano-Micro Lett. 2023, 15, 8. [Google Scholar] [CrossRef]
- Lei, M.; Feng, K.; Ding, S.; Wang, M.; Dai, Z.; Liu, R.; Zhou, B. Breathable and waterproof electronic skin with three-dimensional architecture for pressure and strain sensing in nonoverlapping mode. ACS Nano 2022, 16, 12620–12634. [Google Scholar] [CrossRef]
- Worsey, M.T.; Espinosa, H.G.; Shepherd, J.B.; Thiel, D.V. An evaluation of wearable inertial sensor configuration and supervised machine learning models for automatic punch classification in boxing. IoT 2020, 1, 360–381. [Google Scholar] [CrossRef]
- McDevitt, S.; Hernandez, H.; Hicks, J.; Lowell, R.; Bentahaikt, H.; Burch, R.; Anderson, B. Wearables for biomechanical performance optimization and risk assessment in industrial and sports applications. Bioengineering 2022, 9, 33. [Google Scholar] [CrossRef]
- Bayoumy, K.; Gaber, M.; Elshafeey, A.; Mhaimeed, O.; Dineen, E.H.; Marvel, F.A.; Martin, S.S.; Muse, E.D.; Turakhia, M.P.; Tarakji, K.G.; et al. Smart wearable devices in cardiovascular care: Where we are and how to move forward. Nat. Rev. Cardiol. 2021, 18, 581–599. [Google Scholar] [CrossRef]
- Ajdaroski, M.; Tadakala, R.; Nichols, L.; Esquivel, A. Validation of a device to measure knee joint angles for a dynamic movement. Sensors 2020, 20, 1747. [Google Scholar] [CrossRef]
- Kim, J.; Kantharaju, P.; Yi, H.; Jacobson, M.; Jeong, H.; Kim, H.; Yeo, W.H. Soft wearable flexible bioelectronics integrated with an ankle-foot exoskeleton for estimation of metabolic costs and physical effort. npj Flex. Electron. 2023, 7, 3. [Google Scholar] [CrossRef]
- Quaid, M.A.K.; Jalal, A. Wearable sensors based human behavioral pattern recognition using statistical features and reweighted genetic algorithm. Multimed. Tools Appl. 2020, 79, 6061–6083. [Google Scholar] [CrossRef]
- Kristoffersson, A.; Lindén, M. A systematic review of wearable sensors for monitoring physical activity. Sensors 2022, 22, 573. [Google Scholar] [CrossRef] [PubMed]
- Elayan, H.; Aloqaily, M.; Guizani, M. Sustainability of healthcare data analysis IoT-based systems using deep federated learning. IEEE Internet Things J. 2021, 9, 7338–7346. [Google Scholar] [CrossRef]
- Thapa, C.; Camtepe, S. Precision health data: Requirements, challenges and existing techniques for data security and privacy. Comput. Biol. Med. 2021, 129, 104130. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, M.; Nauman, M.M.; Khan, F.U.; Abas, P.E.; Cheok, Q.; Iqbal, A.; Aissa, B. Vibration-based piezoelectric, electromagnetic, and hybrid energy harvesters for microsystems applications: A contributed review. Int. J. Energy Res. 2021, 45, 65–102. [Google Scholar] [CrossRef]
- Gao, L.; Xu, X.; Han, H.; Yang, W.; Zhuo, R.; Wei, Q.; Hu, N. A broadband hybrid blue energy nanogenerator for smart ocean IoT network. Nano Energy 2024, 109697. [Google Scholar] [CrossRef]
- Rahman, M.T.; Rana, S.S.; Salauddin, M.; Maharjan, P.; Bhatta, T.; Kim, H.; Cho, H.; Park, J.Y. A highly miniaturized freestanding kinetic-impact-based non-resonant hybridized electromagnetic-triboelectric nanogenerator for human induced vibrations harvesting. Appl. Energy 2020, 279, 115799. [Google Scholar] [CrossRef]
- Yuan, F.; Yu, Y.; Wu, J.; Peng, J.; Jiang, C.; Fan, X.; Li, J. RCF crack direction assessment in moving ferromagnetic material by DC electromagnetic NDT technique. NDT E Int. 2023, 138, 102882. [Google Scholar] [CrossRef]
- Li, G.; Wang, J.; Fu, S.; Shan, C.; Wu, H.; An, S.; Hu, C. A nanogenerator enabled by a perfect combination and synergetic utilization of triboelectrification, charge excitation and electromagnetic induction to reach efficient energy conversion. Adv. Funct. Mater. 2023, 33, 2213893. [Google Scholar] [CrossRef]
- Wang, Z.L. From contact electrification to triboelectric nanogenerators. Rep. Prog. Phys. 2021, 84, 096502. [Google Scholar] [CrossRef]
- Lai, Y.; Lu, H.; Wu, H.; Zhang, D.; Yang, J.; Ma, J.; Shamsi, M.; Vallem, V.; Dickey, M.D. Elastic multifunctional liquid–metal fibers for harvesting mechanical and electromagnetic energy and as self-powered sensors. Adv. Energy Mater. 2021, 11, 2100411. [Google Scholar] [CrossRef]
- Parvin, N.; Kumar, V.; Manikkavel, A.; Park, S.S.; Mandal, T.K.; Joo, S.W. Great new generation carbon microsphere-based composites: Facile synthesis, properties and their application in piezo-electric energy harvesting. Appl. Surf. Sci. 2023, 613, 156078. [Google Scholar] [CrossRef]
- Kumar, V.; Mandal, T.K.; Kumar, A.; Alam, M.N.; Parvin, N. Multifunctional properties of chemically reduced graphene oxide and silicone rubber composite: Facile synthesis and application as soft composites for piezoelectric energy harvesting. Express Polym. Lett. 2022, 16, 978–995. [Google Scholar] [CrossRef]
- Kumar, V.; Manikkavel, A.; Kumar, A.; Alam, M.N.; Hwang, G.J.; Park, S.S. Stretchable piezo-electric energy harvesting device with high durability using carbon nanomaterials with different structure and their synergism with molybdenum disulfide. J. Vinyl Addit. Technol. 2022, 28, 813–827. [Google Scholar] [CrossRef]
- Kumar, V.; Lee, D.J.; Park, S.S. Multifunctional composites-based sensors for health monitoring: Latest insights and prospects. Mater. Today Commun. 2025, 44, 112187. [Google Scholar] [CrossRef]
- Manikkavel, A.; Kumar, V.; Kim, J.; Lee, D.J.; Park, S.S. Investigation of high temperature vulcanized and room temperature vulcanized silicone rubber based on flexible piezo-electric energy harvesting applications with multi-walled carbon nanotube reinforced composites. Polym. Compos. 2022, 43, 1305–1318. [Google Scholar] [CrossRef]
- Kumar, V.; Azam, S.; Alam, M.N.; Hong, W.B.; Park, S.S. Novel rubber composites based on copper particles, multi-wall carbon nanotubes and their hybrid for stretchable devices. Polymers 2022, 14, 3744. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Park, S.S. Soft composites filled with iron oxide and graphite nanoplatelets under static and cyclic strain for different industrial applications. Polymers 2022, 14, 2393. [Google Scholar] [CrossRef]
- Manikkavel, A.; Kumar, V.; Lee, D.J. Simple fracture model for an electrode and interfacial crack in a dielectric elastomer under tensile loading. Theor. Appl. Fract. Mech. 2020, 108, 102626. [Google Scholar] [CrossRef]
- Kumar, V.; Kumar, A.; Wu, R.R.; Lee, D.J. Room-temperature vulcanized silicone rubber/barium titanate–based high-performance nanocomposite for energy harvesting. Mater. Today Chem. 2020, 16, 100232. [Google Scholar] [CrossRef]
- Toleukhanova, S.; Shen, T.H.; Chang, C.; Swathilakshmi, S.; Bottinelli Montandon, T.; Tileli, V. Graphene Electrode for Studying CO2 Electroreduction Nanocatalysts under Realistic Conditions in Microcells. Adv. Mater. 2024, 36, 2311133. [Google Scholar] [CrossRef]
- Lee, C.H.; Khalina, A.; Lee, S.; Liu, M. A comprehensive review on bast fibre retting process for optimal performance in fibre-reinforced polymer composites. Adv. Mater. Sci. Eng. 2020, 2020, 6074063. [Google Scholar] [CrossRef]
- Ritchie, R.O. Toughening materials: Enhancing resistance to fracture. Philos. Trans. R. Soc. A 2021, 379, 20200437. [Google Scholar] [CrossRef] [PubMed]
- Mousavi, S.R.; Estaji, S.; Paydayesh, A.; Arjmand, M.; Jafari, S.H.; Nouranian, S.; Khonakdar, H.A. A review of recent progress in improving the fracture toughness of epoxy-based composites using carbonaceous nanofillers. Polym. Compos. 2022, 43, 1871–1886. [Google Scholar] [CrossRef]
- Rahmatabadi, D.; Ghasemi, I.; Baniassadi, M.; Abrinia, K.; Baghani, M. 3D printing of PLA-TPU with different component ratios: Fracture toughness, mechanical properties, and morphology. J. Mater. Res. Technol. 2022, 21, 3970–3981. [Google Scholar] [CrossRef]
- Alam, M.N.; Kumar, V.; Lee, D.J.; Choi, J. Synergistically toughened silicone rubber nanocomposites using carbon nanotubes and molybdenum disulfide for stretchable strain sensors. Compos. Part B Eng. 2023, 259, 110759. [Google Scholar] [CrossRef]
- Ben Atitallah, B.; Rajendran, D.; Hu, Z.; Ramalingame, R.; Quijano Jose, R.B.; da Veiga Torres, R.; Bouchaala, D.; Derbel, N.; Kanoun, O. Piezo-resistive pressure and strain sensors for biomedical and tele-manipulation applications. Adv. Sens. Biomed. Appl. 2021, 38, 47–65. [Google Scholar]
- Nirosha, R.; Agarwal, R. Characterization and modeling of threshold voltage for organic and amorphous thin-film transistors. Microelectron. Reliab. 2023, 147, 115054. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Ge, X.; Schubert, D.W. Superior sensitive, high-tensile flexible fabric film strain sensor. Compos. Part A Appl. Sci. Manuf. 2023, 172, 107610. [Google Scholar] [CrossRef]
- Salaeh, S.; Das, A.; Stöckelhuber, K.W.; Wießner, S. Fabrication of a strain sensor from a thermoplastic vulcanizate with an embedded interconnected conducting filler network. Compos. Part A Appl. Sci. Manuf. 2020, 130, 105763. [Google Scholar] [CrossRef]
- Al-Bahrani, M.; Bouaissi, A.; Cree, A. The fabrication and testing of a self-sensing MWCNT nanocomposite sensor for oil leak detection. Int. J. Low-Carbon Technol. 2022, 17, 622–629. [Google Scholar] [CrossRef]
- Zhang, R.; Liu, C.; Wei, C.; Wang, Y.; Li, F.; Zhang, Z.; Tang, L. Thermoplastic charge-transfer hydrogels for highly sensitive strain and temperature sensors. J. Mater. Chem. A 2023, 11, 8320–8329. [Google Scholar] [CrossRef]
- Liu, J.; Chen, X.; Sun, B.; Guo, H.; Guo, Y.; Zhang, S.; Tang, J. Stretchable strain sensor of composite hydrogels with high fatigue resistance and low hysteresis. J. Mater. Chem. A 2022, 10, 25564–25574. [Google Scholar] [CrossRef]
- Song, P.; Wang, G.; Zhang, Y. Preparation and performance of graphene/carbon black silicone rubber composites used for highly sensitive and flexible strain sensors. Sens. Actuators A Phys. 2021, 323, 112659. [Google Scholar] [CrossRef]
- Kumar, V.; Manikkavel, A.; Yewale, M.A.; Alam, M.N.; Park, S.S. Lightweight, compressible, stretchable, ultra-soft, and mechanically stable composites for piezo-electric energy generators and strain sensing. Mater. Res. Bull. 2024, 179, 112962. [Google Scholar] [CrossRef]
- Xu, J.; Yu, J.; Xu, J.; Sun, C.; He, W.; Huang, J.; Li, G. High-value utilization of waste tires: A review with focus on modified carbon black from pyrolysis. Sci. Total Environ. 2020, 742, 140235. [Google Scholar] [CrossRef]
- Pei, Z.; Zhang, Q.; Liu, Y.; Zhao, Y.; Dong, X.; Zhang, Y.; Sang, S. A high gauge-factor wearable strain sensor array via 3D printed mold fabrication and size optimization of silver-coated carbon nanotubes. Nanotechnology 2020, 31, 305501. [Google Scholar] [CrossRef]
- Peng, J.; He, Y.; Zhou, C.; Su, S.; Lai, B. The carbon nanotubes-based materials and their applications for organic pollutant removal: A critical review. Chin. Chem. Lett. 2021, 32, 1626–1636. [Google Scholar] [CrossRef]
- Guo, H.; Ji, P.; Halász, I.Z.; Pirityi, D.Z.; Bárány, T.; Xu, Z.; Zheng, L.; Zhang, L.; Liu, L.; Wen, S. Enhanced fatigue and durability properties of natural rubber composites reinforced with carbon nanotubes and graphene oxide. Materials 2020, 13, 5746. [Google Scholar] [CrossRef]
- Md Said, N.H.; Liu, W.W.; Khe, C.S.; Lai, C.W.; Zulkepli, N.N.; Aziz, A. Review of the past and recent developments in functionalization of graphene derivatives for reinforcement of polypropylene nanocomposites. Polym. Compos. 2021, 42, 1075–1108. [Google Scholar] [CrossRef]
- Chen, B.; Dai, J.; Song, T.; Guan, Q. Research and development of high-performance high-damping rubber Materials for high-damping rubber isolation bearings: A review. Polymers 2022, 14, 2427. [Google Scholar] [CrossRef]
- Rahmani, P.; Shojaei, A. A review on the features, performance and potential applications of hydrogel-based wearable strain/pressure sensors. Adv. Colloid Interface Sci. 2021, 298, 102553. [Google Scholar] [CrossRef] [PubMed]
- Haghi, M.; Danyali, S.; Ayasseh, S.; Wang, J.; Aazami, R.; Deserno, T.M. Wearable devices in health monitoring from the environmental towards multiple domains: A survey. Sensors 2021, 21, 2130. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S.; Pavelyev, V.; Tripathi, N.; Platonov, V.; Sharma, P.; Ahmad, R.; Khosla, A. Recent advances in the development of carbon nanotubes based flexible sensors. J. Electrochem. Soc. 2020, 167, 047506. [Google Scholar] [CrossRef]
- Palumbo, A.; Li, Z.; Yang, E.H. Trends on carbon nanotube-based flexible and wearable sensors via electrochemical and mechanical stimuli: A review. IEEE Sens. J. 2022, 22, 20102–20125. [Google Scholar] [CrossRef]
- Nasture, A.M.; Ionete, E.I.; Lungu, F.A.; Spiridon, S.I.; Patularu, L.G. Water quality carbon nanotube-based sensors technological barriers and late research trends: A bibliometric analysis. Chemosensors 2022, 10, 161. [Google Scholar] [CrossRef]
- Li, K.; Yang, W.; Yi, M.; Shen, Z. Graphene-based pressure sensor and strain sensor for detecting human activities. Smart Mater. Struct. 2021, 30, 085027. [Google Scholar] [CrossRef]
- Esteghamat, A.; Akhavan, O. Graphene as the ultra-transparent conductive layer in developing the nanotechnology-based flexible smart touchscreens. Microelectron. Eng. 2023, 267, 111899. [Google Scholar] [CrossRef]
- Zhang, Z.; Xiang, D.; Wu, Y.; Zhang, J.; Li, Y.; Wang, M.; Li, Y. Effect of carbon black on the strain sensing property of 3D printed conductive polymer composites. Appl. Compos. Mater. 2022, 29, 1235–1248. [Google Scholar] [CrossRef]
- Dinesh, A.; Saravanakumar, P.; Prasad, B.R.; Raj, S.K. Carbon black based self-sensing cement composite for structural health monitoring–A review on strength and conductive characteristics. In Materials Today: Proceedings; Elsevier: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Kim, D.-S.; Choi, Y.W.; Shanmugasundaram, A.; Jeong, Y.-J.; Park, J.; Oyunbaatar, N.-E.; Kim, E.-S.; Choi, M.; Lee, D.-W. Highly durable crack sensor integrated with silicone rubber cantilever for measuring cardiac contractility. Nat. Commun. 2020, 11, 535. [Google Scholar] [CrossRef]
- Horne, J.; McLoughlin, L.; Bury, E.; Koh, A.S.; Wujcik, E.K. Interfacial phenomena of advanced composite materials toward wearable platforms for biological and environmental monitoring sensors, armor, and soft robotics. Adv. Mater. Interfaces 2020, 7, 1901851. [Google Scholar] [CrossRef]
- Han, R.; Li, Y.; Zhu, Q.; Niu, K. Research on the preparation and thermal stability of silicone rubber composites: A review. Compos. Part C Open Access 2022, 8, 100249. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials Used During Fabrication * | Modulus | Elongation at Break | Electrical Properties | Response Time | Gauge Factor | Reference |
|---|---|---|---|---|---|---|
| MWCNT, SR | 6.5 MPa | 210% | 0.5 kΩ | - | ~1.4 at 125% | [18] |
| LIG, PI, PDMS | - | - | 250 Ω | - | 75 at 5% | [19] |
| NCB, PDMS | 15 ms | 20.97 at 35% | [27] | |||
| CNF, PDMS | - | - | 10 kΩ/sq | ~100 ms | 11.11 at 50% | [46] |
| CNF, PDMS | - | - | - | ~50 ms | 417 at 100% | [47] |
| CNT, GNP, SR | 11 MPa | - | 0.7 kΩ | - | - | [60] |
| CNT, GNP, CB, SR | 7.5 MPa | 250% | - | - | 7.8 at 100% | [64] |
| CB, f-GNP, SR | 4 MPa | 170% | 5 kΩ | - | - | [87] |
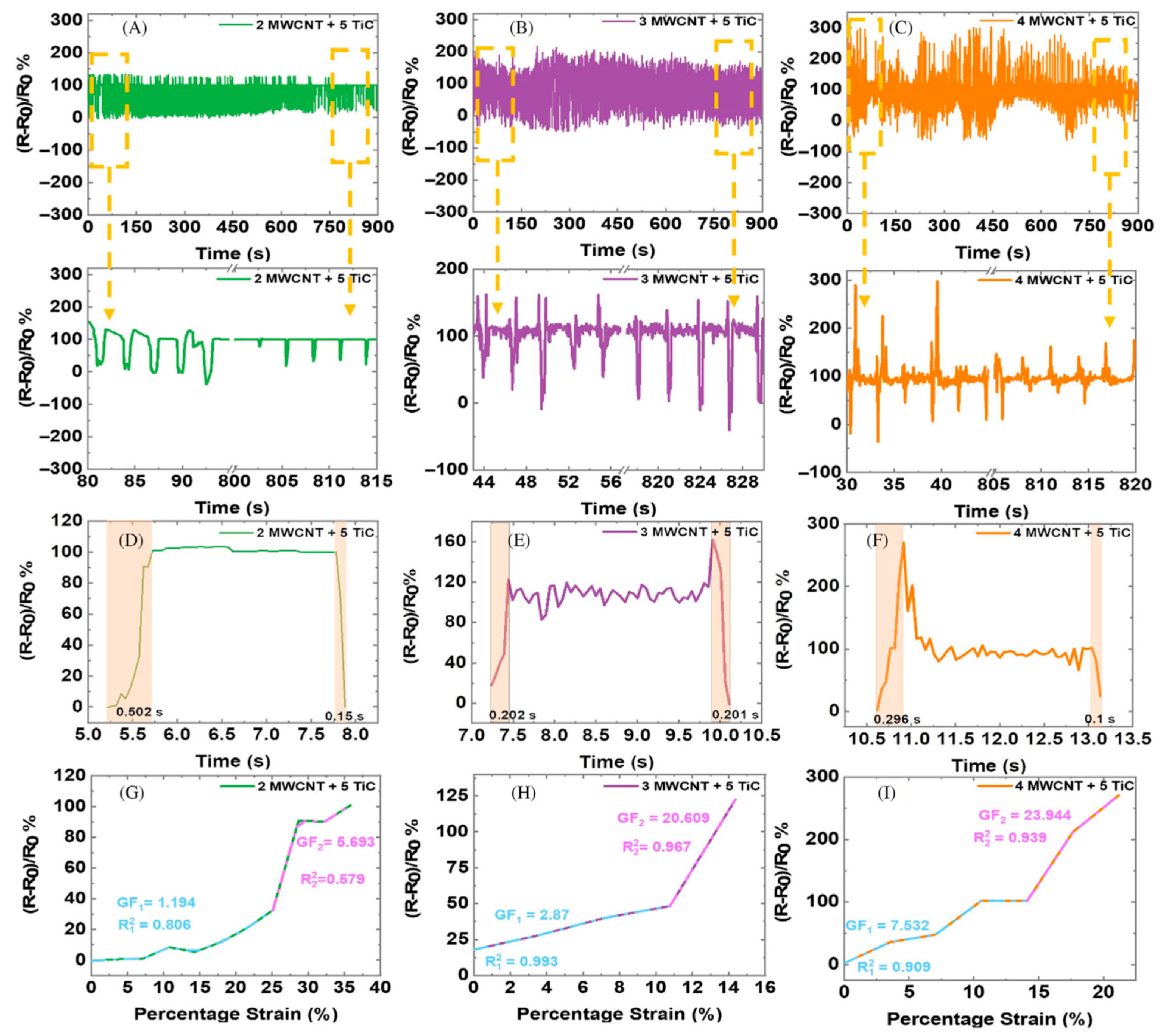
| MWCNT, TiC, SR | 3.87 MPa | 210% | - | 100–300 ms | 23.9 at 22% | [91] |
| MWCNT, f-PDMS | - | - | - | 12.88 ms | 22.64 at 225% | [98] |
| CNS, TPU | - | 200% | 30 kΩ | - | 57.94 at 100% | [107] |
| CFM, GO/PAN | - | 50% | - | <300 ms | 10,688 at 15% | [109] |
| PVA, Bn, PEI, MXene | - | - | - | 120 ms | - | [111] |
| SnS2, PDMS | - | - | - | - | 3933 at 1.2% | [112] |
| CNT, UHPC, | 166.3 MPa | - | 12.95 kΩ | - | 28 | [117] |
| MWCNT, Ecoflex | - | 1300% | - | - | 6.86 at 100% | [120] |
| Alumina, Kapton | - | 120% | - | - | 2.6 × 108 at 70% | [128] |
| MWCNT, SBR | 12 MPa | 200% | - | - | 48.62 at 187% | [132] |
| MWCNT, SR | 3.5 MPa | 220% | - | 200 and 125 ms | 3.7 at 40% | [136] |
| MWCNT, GNP, SR | 9 MPa | 175% | - | 32.04 at 100% | [139] | |
| PAA-PVA hydrogels | - | 30% | - | - | 2.03 at 15% | [141] |
| CIP, CB, PDMS | 80% | 96 and 50 ms | 7.74 at 80% | [156] | ||
| MWCNT, MoS2, SR | 0.9 MPa | 325% | 25.95 at 155% | [187] | ||
| SNW, TPU | 360% | >16,000 at 360% | [190] | |||
| CCB, PVDF, ENR | 60% | 4 MΩ | 1560 at 40% | [191] | ||
| CCB, Graphene, SR | 7.7 MPa | 200% | 1.89 × 104 at 44% | [195] | ||
| MWCNT, Thinner, SR | 1.14 MPa | 200% | - | 540–110 ms | 0.94 at 40% | [196] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, V.; Alam, M.N.; Manik, G.; Park, S.-S. Recent Advancements in Rubber Composites for Physical Activity Monitoring Sensors: A Critical Review. Polymers 2025, 17, 1085. https://doi.org/10.3390/polym17081085
Kumar V, Alam MN, Manik G, Park S-S. Recent Advancements in Rubber Composites for Physical Activity Monitoring Sensors: A Critical Review. Polymers. 2025; 17(8):1085. https://doi.org/10.3390/polym17081085
Chicago/Turabian StyleKumar, Vineet, Md Najib Alam, Gaurav Manik, and Sang-Shin Park. 2025. "Recent Advancements in Rubber Composites for Physical Activity Monitoring Sensors: A Critical Review" Polymers 17, no. 8: 1085. https://doi.org/10.3390/polym17081085
APA StyleKumar, V., Alam, M. N., Manik, G., & Park, S.-S. (2025). Recent Advancements in Rubber Composites for Physical Activity Monitoring Sensors: A Critical Review. Polymers, 17(8), 1085. https://doi.org/10.3390/polym17081085