1. Introduction
Composite materials are an alternative to metal materials in structural construction in multiple areas [
1]. In the aerospace industry, composite materials are primarily used for constructing aerostructures, particularly aircraft. They exceed 50% of the structural weight of modern aircraft [
2,
3,
4,
5]. In other industries, such as naval [
6,
7,
8] and transport [
9,
10,
11,
12,
13], the use of composite materials is more limited due to factors such as the recycling of materials fabricated from thermoset resins [
14,
15] and the absence of high-speed manufacturing processes. However, composite materials are trending upward. Composite materials are generally linked to the design of lightweight and optimized structures, a key factor in the aerospace sector and important to other sectors. Applied design philosophies have evolved over the last few decades, moving from structures designed for safe living to those designed for certain failure or withstanding damage, the latter philosophy being applied if a structurally optimized component is desired. The philosophy of tolerance for harm is based on two key pillars:
- -
Know and quantify the properties of the material, such as maximum allowable defect size or speed and propagation of the defect, among others. Both fields have been extensively studied in the specific case of composite materials [
16,
17,
18].
- -
Have an inspection and maintenance policy that can detect faults before they reach critical size [
19,
20].
Normally, maintenance policies are based on a schedule of inspections and preventative actions. However, current trends in sectors such as aerospace, wind, or railways tend to replace this with maintenance on condition, which reduces costs significantly. One of the keys to maintenance on condition [
21] involves monitoring the equipment to be maintained, which indicates their real situation at all times and when to act specifically. Structural monitoring is known as SHM (structural health monitoring) [
22,
23]. Its objectives are to detect stress levels in the structure, the likelihood of failure, and the depletion of its life due to fatigue or the appearance of overloads, among others [
24,
25,
26]. One of the most widely used monitoring technologies is fiber optic sensors in Bragg gratings (FBGSs), which offer several interesting advantages over extensometry technologies, including small dimensions, the ability to be embedded, simplicity in cabling due to their multiplexability, stable thermal and load monitoring, and insensitivity to electromagnetic interference, among others [
27,
28,
29,
30,
31]. Using FBGSs in structures necessitates a comprehensive understanding of the sensor’s behavior and its response to various variables, including temperature, humidity, dynamic loads, and the occurrence of loads and/or strains in multiple directions. This last aspect has been studied by multiple authors and was also the subject of an experimental study by the authors of this article [
32,
33,
34,
35,
36]. Having an inspection and maintenance policy that detects faults before they reach critical size is necessary. Typically, the most commonly used coatings are polyimide, acrylate, and ORMOCER
® [
37,
38,
39,
40]. The importance and influence of the coating on an FBG sensor’s response lies in the very function it performs, which is to protect the core and coating from exposure to moisture and abrasion on its surface, prevent the appearance of micro-cracks and premature damage to the optical fiber, as well as guarantee the phenomenon of reflection according to the Snell Theory. According to Nath et al. [
41], polyimide coatings have the advantage of being resistant to elevated temperatures up to 300 °C and providing reliable results when embedded. Polyimide, however, is sensitive to humidity. Acrylate coatings best protect fiber optics and are immune to humidity; however, temperatures from 100 °C can be critical [
41]. The first acrylate coatings consisted of one layer, but due to attenuation problems induced by micro-curvatures or shear retardation, they became two layers. Gloge [
42] elaborated on this study by stating that micro-curvature losses are minimized using inner (primary) and outer (secondary) coatings with an elastic modulus ratio ten times higher than the secondary versus the primary. In recent years, an ORMOCER
® coating formed from a combination of ceramic and metal has been used. It has a high elastic modulus, is not affected by humidity, provides better radiation protection, and is stable at temperatures above 200 °C [
43,
44,
45].
There are different studies on coating type influence on embedded FBGSs. For example, Pak et al. [
46] and Sirkis et al. [
47] observed that a coating’s thickness and shear modulus influence shear-induced strain in the sensor. Roberts et al. [
48] noted that using brittle materials as a coating leads to crack formation at low load levels. Other researchers have studied how bonding between the sensor and the host material influences the type of coating material and bonding agent for improving adhesion [
41,
49]. Recent studies on coatings have focused on temperature measurement with FBGSs. Mishra et al. [
50] conducted experiments with different coatings to study how temperature sensitivity varies from the thermal expansion coefficient. Studies comparing coatings are noteworthy for the results obtained at cryogenic temperatures. Sampath et al. [
51] compared composite materials’ coatings under cryogenic conditions to measure temperature and strains with and without a coating. They found that coated sensors had a sensitivity of 48 pm/°C, ten times higher than uncoated FBGSs. Metallic coatings such as gold and silver have demonstrated a marked improvement in sensor sensitivity to high-temperature gradients, with a delay response of 300 ms compared to bare sensors [
52]. It is also worth mentioning that Weisbrich et al.’s study [
53] on shrinkage tests, which analyzed the influence of output signals on distributed FBGSs (Rayleigh type) in concrete structures, used the same coatings studied in the present work. Their results showed that the ORMOCER
® coating had the least strain losses (<2%), followed by the polyimide and acrylate coatings (<4%).
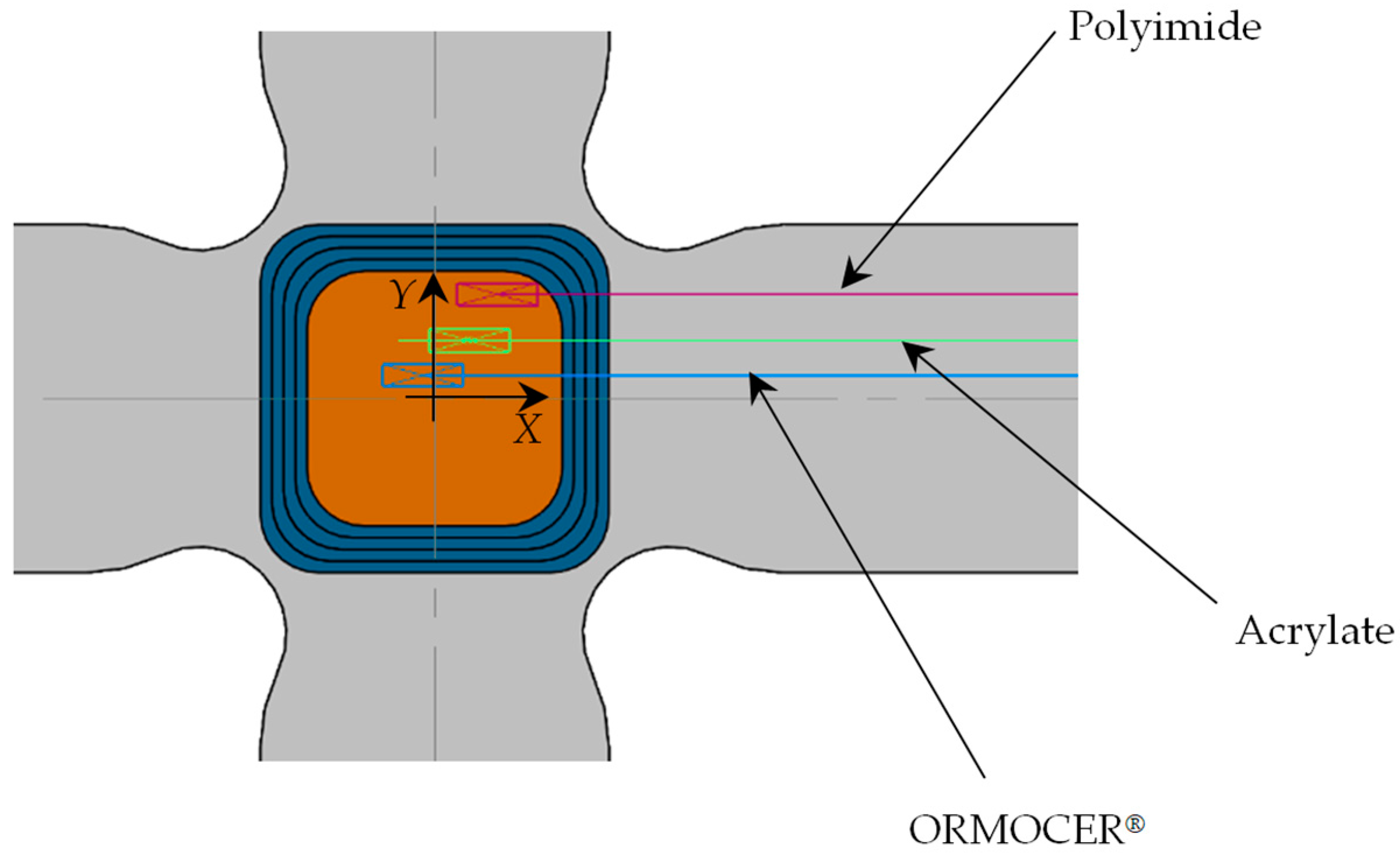
The need to study the influence of the transverse strain on the FBGS response is justified by some researchers in the scientific community, such as R. M. Measures [
54] and Luyckx et al. [
55]. This work investigates the generation of multiaxial strain states in a cruciform specimen made of carbon-fiber-reinforced composite material under different load cases. Three FBG sensors located in the central area of the specimen were embedded with three types of coating material: polyimide, acrylate, and ORMOCER
®. In a previous study, we examined the impact of transverse strain on longitudinal strain measurement for embedded polyimide-coated FBGSs. In this work, a non-negligible measurement error was observed in tests caused by transverse strains transmitted to the sensor, and
(strain sensitivity factor) was calculated by uniaxial characterization [
36]. In the present work, a campaign of similar biaxial tests was performed by maintaining a constant longitudinal strain and varying the transverse strain using a strain gauge rosette installed in the central area to gauge measurement. The tests consisted of four cases of longitudinal strain (500
, 1000
, 1500
, and 2000
). We simultaneously varied the transverse strain between 0
and 4000
in steps of 500
while keeping the longitudinal strain constant and pausing each step to stabilize the sensor. We applied the equations of Kim et al. [
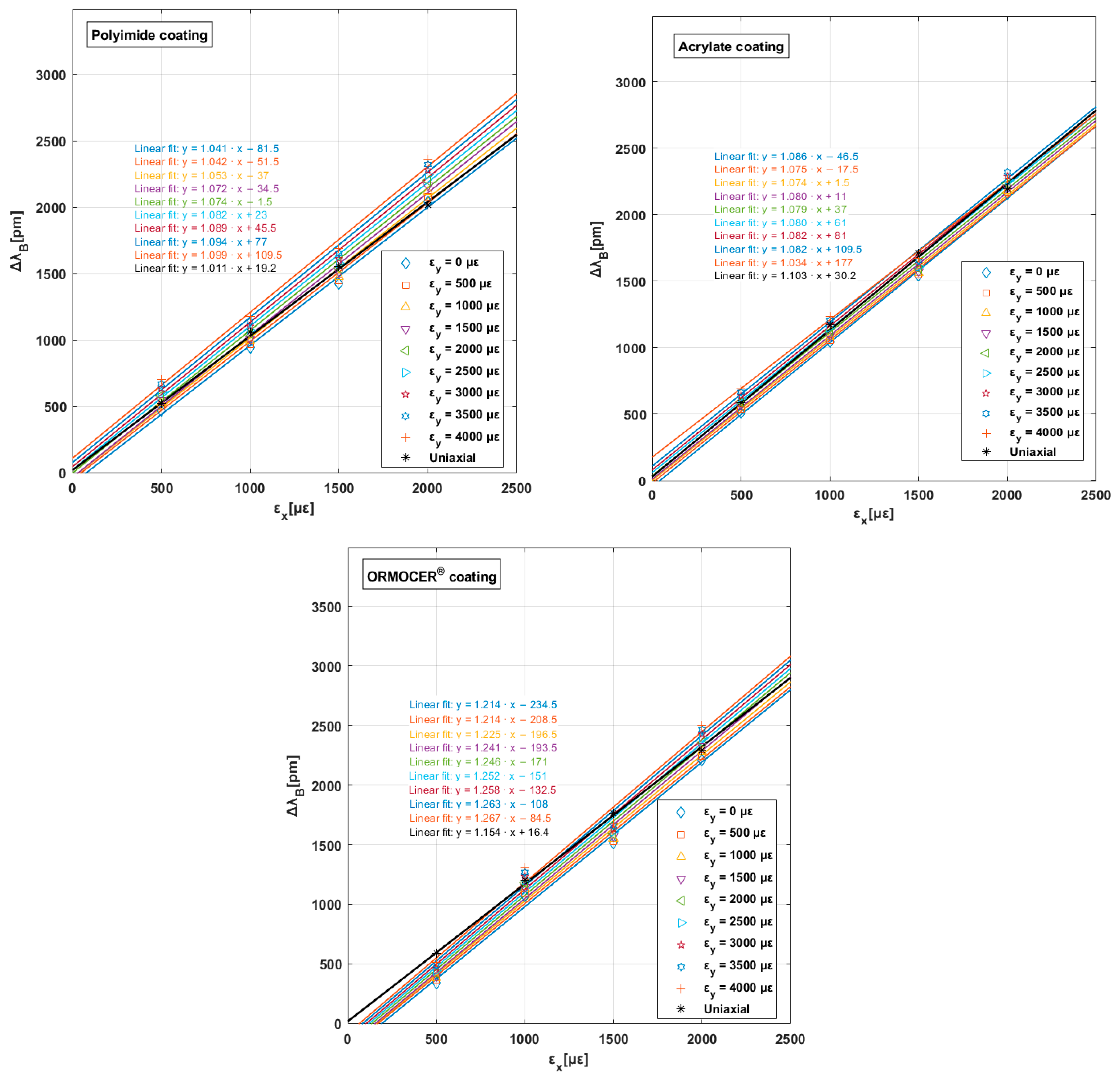
56], corresponding to the Strain–Optic Theory, to an isotropic sensor kept at a constant temperature. These strain values correspond to those common in composite structures for naval, aeronautics, and space use. In addition to calculating the influence of transverse strain on the sensor response by analyzing
(variation in the Bragg wavelength), we observed how the coating materials’ mechanical behavior affected the results.
4. Conclusions
This study aimed to evaluate the effect of transverse strains on FBG sensor responses embedded in a cruciform specimen of composite material. The analyzed sensors had different coatings (polyimide, acrylate, and ORMOCER®) commonly used in structural monitoring. The characterization of this sensor type is usually conducted with standard uniaxial stress tests. This type of test allows the relationship between the longitudinal strain in the sensor to be obtained and its physical response , which is defined through (strain sensitivity factor) by applying linear regression to the experimentally obtained points. This value depends on the sensor coating material and is considered constant for the entire strain field.
In uniaxial tests, the sensor is subjected to the transverse strain which depends on the longitudinal strain the Poisson coefficient, and that it will be equal to. This transverse strain has the following characteristics:
- -
It presents a fixed value for each longitudinal strain value;
- -
It presents negative values for each longitudinal strain value;
- -
It has low proportions.
The above characteristics do not correspond to situations found in real structures where they are common due to complex load states, having different transverse strain values for the same longitudinal strain value, or situations in which the transverse strain may be higher than the longitudinal strain. In laminate composite structures with thin thicknesses, we can assume the plane stress hypothesis when subjected to loads contained in the plane. For this reason, a scientific methodology was conducted to develop different plane stress cases using biaxial tests. We reached the following conclusions from our results:
- -
The response of the sensor to the longitudinal strain was significantly influenced by the transverse strain and the coating material. The influence of the transverse strain affected three fundamental parameters of the sensor: the output or response of the sensor and two derived values, such as the sensor’s (strain sensitivity factor) and the interpreted value. The influence of the transverse strain on the sensor’s response can reach values of up to 46% in the signal for the defined reference state (the one with a ratio ). This extreme case was observed in a polyimide-coated sensor subjected to a ratio of . At lower ratios, the influence decreases. We also observed that the influence on the sensor’s output signal was lower in acrylate and ORMOCER® coatings, exhibiting similar behaviors at around 30%.
- -
Regarding magnitudes derived from sensor
(strain sensitivity factor) and
interpretation, the influence can reach a 10% increase in extreme cases
for polyimide and ORMOCER
® coatings. On the other hand, for the acrylate coating, a decrease of 6% in the sensor’s
value (strain sensitivity factor) was observed. This phenomenon may be due to the mechanical nature of the coating material (
Table 1).
- -
A significant hysteresis effect was observed in the loading and unloading cycles of the acrylate coating, being higher than 150 pm in one case, which is logical considering the less rigid nature (
Table 1) of this polymer.
- -
Based on the results obtained, the standardized sensor characterization procedure should be reconsidered for sensors working in multiaxial stress states with high ratios, where the sensor’s (strain sensitivity factor) could lead to erroneous interpretations in terms of interpreted .
When compared to the Strain–Optic Theory, these experimental results demonstrated that the increase in the Bragg wavelength recorded followed a trend contrary to the theory equations. One possible cause may be that the strain field was not completely transferred to the FBGS in traction but in out-of-plane compression. To analyze and study this phenomenon, as well as the sensor’s response, different studies involving states of deformation applied to compression or an equivalent are necessary to confirm or discard this hypothesis.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}