

A Study of Deployable Structures Based on Nature Inspired Curved-Crease Folding


Abstract
1. Introduction
1.1. Early Motivation
1.2. Brief History of Curved Folding

1.3. Digital Tools for Curved-Crease Folding
2. Materials and Methods
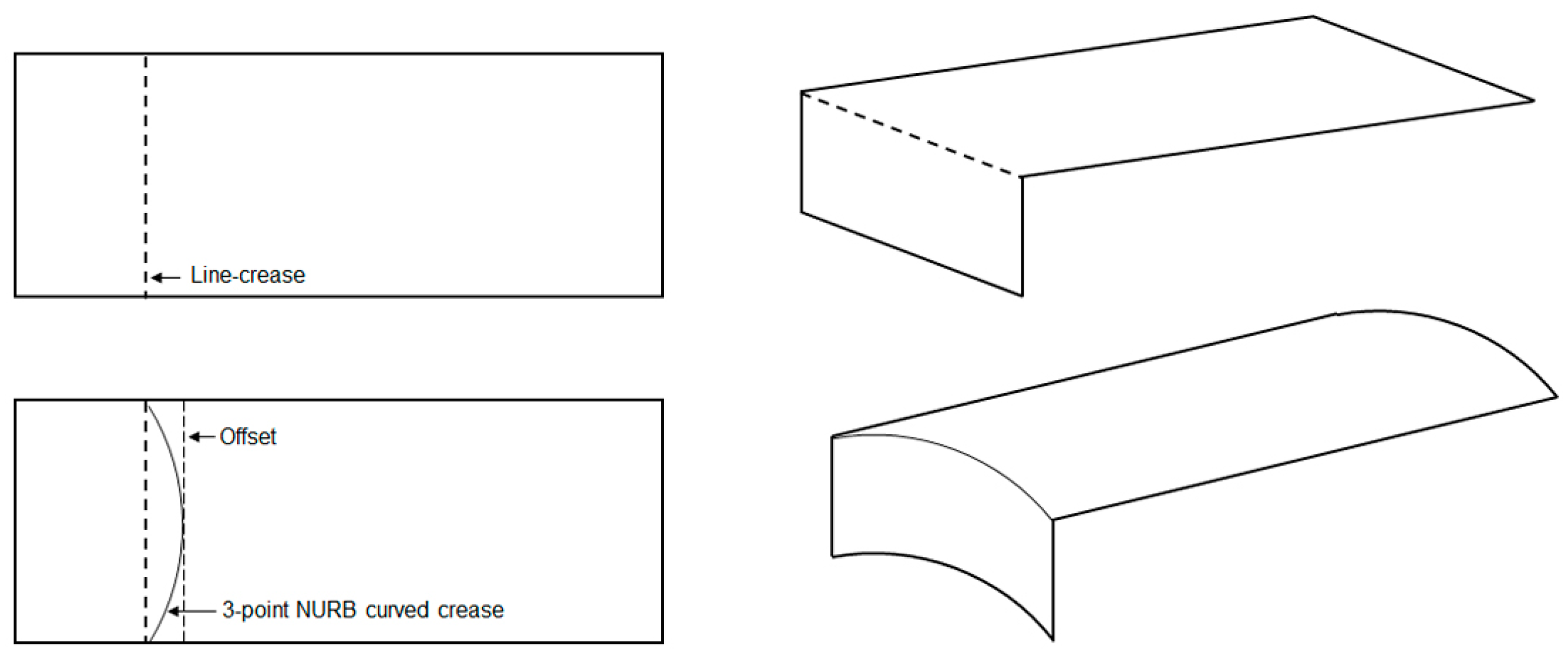
2.1. Basic Design Setup
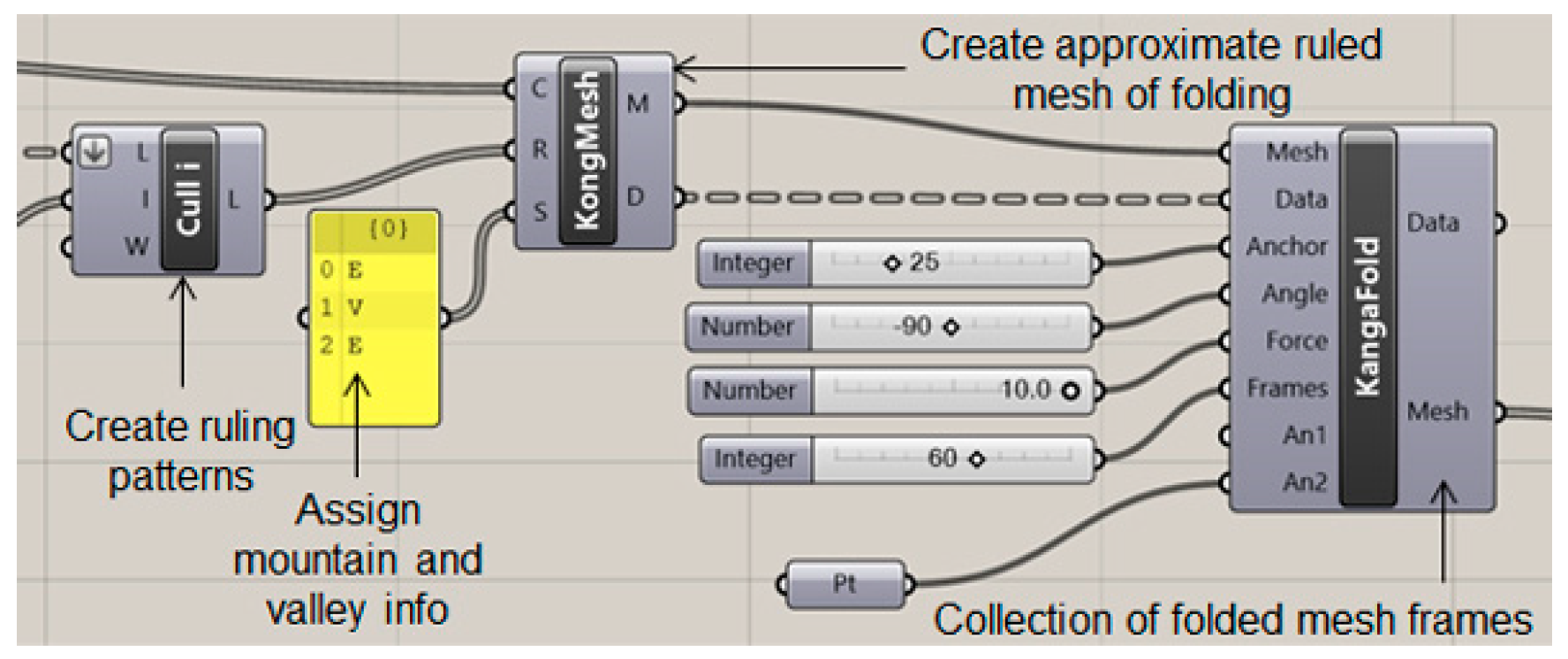
2.2. Parametric Model for Folding
2.3. Looking for Inspiration in Nature
2.4. Multiple Folds and Prototyping
2.4.1. Three-Dimensional Printed Prototypes
2.4.2. Hybrid Composite Assembly
2.4.3. Discretely Cured Composite System
3. Results and Discussions
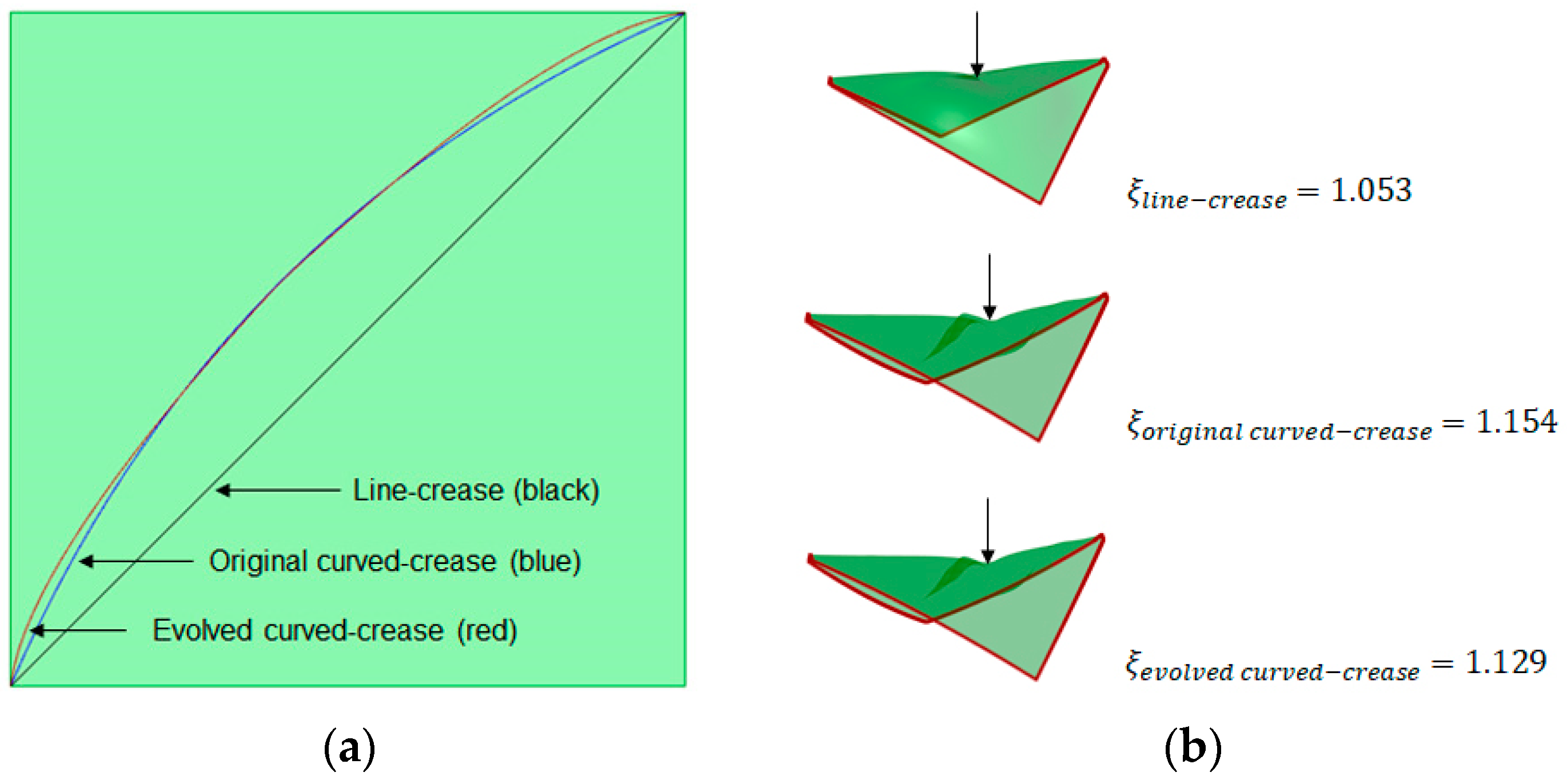
3.1. Minor Offset Test Case
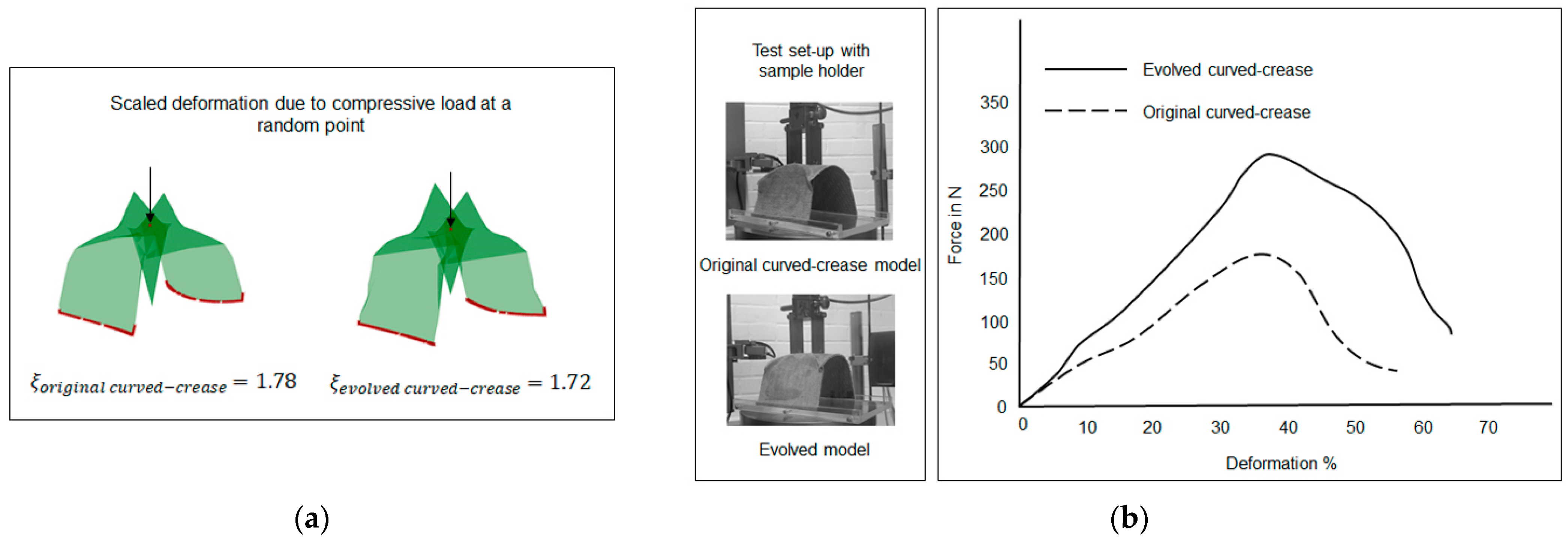
3.2. Major Offset Test Case
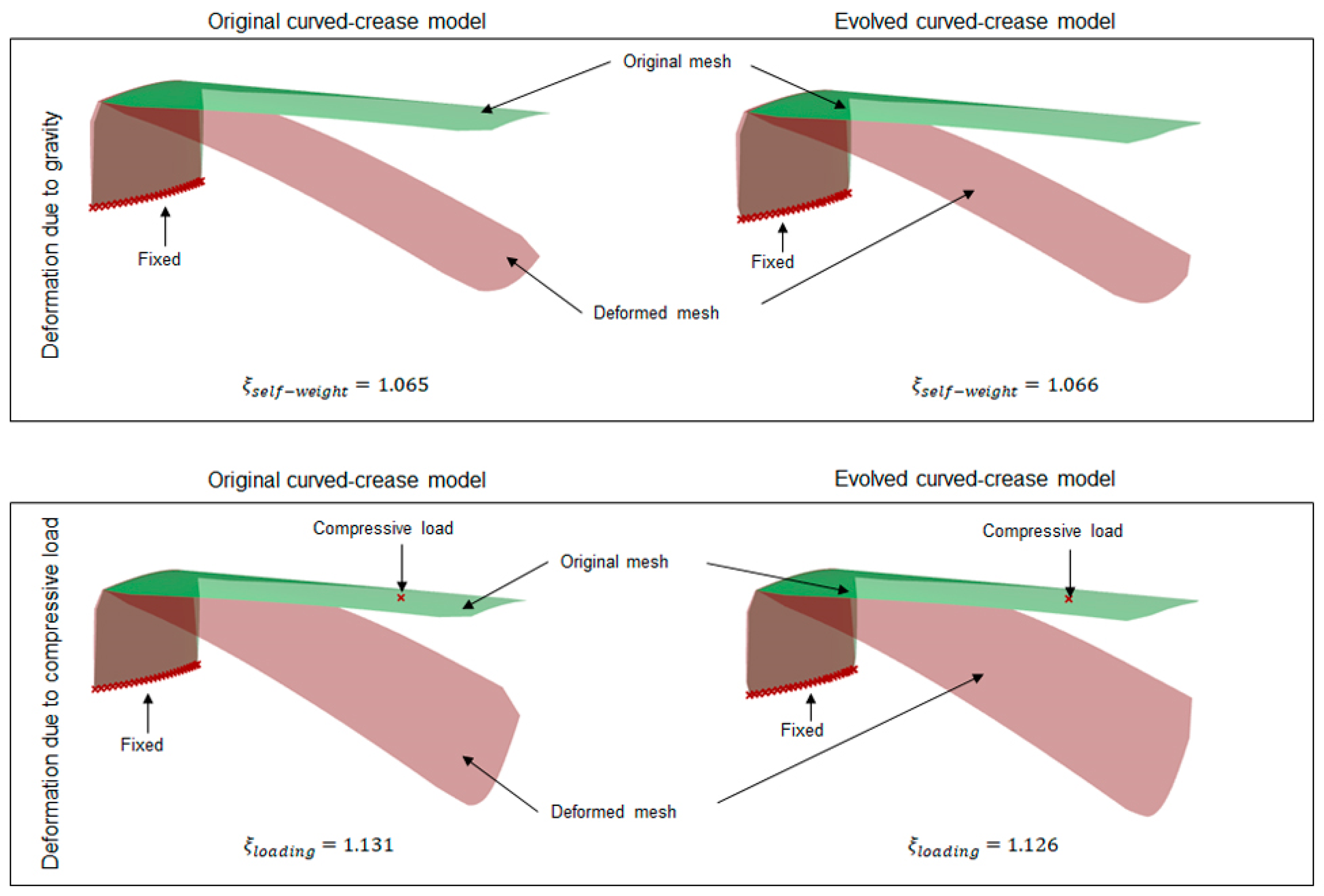
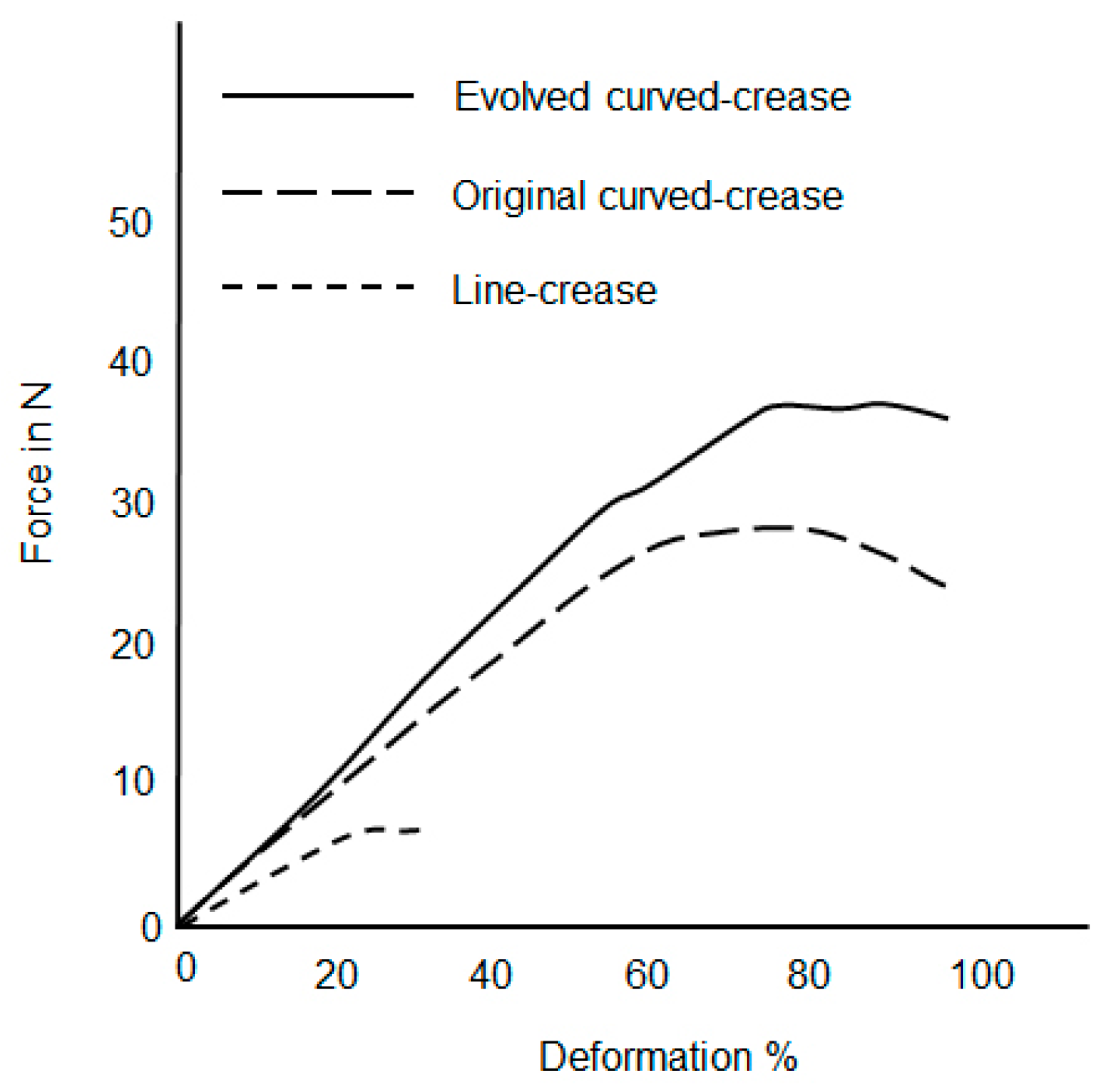
3.3. Short Discussion on Loading at the Folding Crease
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dureisseix, D. An Overview of Mechanisms and Patterns with Origami. Int. J. Space Struct. 2012, 27, 1–14. [Google Scholar] [CrossRef]
- Hatori, K. K’s Origami: History of Origami. Ousaan.com. 2023. Available online: https://origami.ousaan.com/library/historye.html (accessed on 23 August 2023).
- Lucarelli, C.D.; Carlo, J.C. Parametric modeling simulation for an origami shaped canopy. Front. Arch. Res. 2020, 9, 67–81. [Google Scholar] [CrossRef]
- Vergauwen, A.; De Laet, L.; De Temmerman, N. Computational modelling methods for pliable structures based on curved-line folding. Comput. Des. 2017, 83, 51–63. [Google Scholar] [CrossRef]
- Teaching at the International Summer School in Bernau. Origami Tessellations. 2017. Available online: https://www.origamitessellations.com/2017/08/teaching-at-the-international-summer-school-in-bernau/ (accessed on 23 August 2023).
- Garadinervi: Repertori—HfG Basic Course, Josef Albers with a Folded… (n.d.). Garadinervi.tumblr.com. Available online: https://garadinervi.tumblr.com/post/187694293706/hfg-basic-course-josef-albers-with-a-folded/ (accessed on 23 August 2023).
- UCL Curved-Crease Folding. The Bartlett School of Architecture. 2018. Available online: https://www.ucl.ac.uk/bartlett/architecture/curved-crease-folding (accessed on 1 November 2023).
- McPharlin, P. Paper Sculpture: Its Construction & Uses for Display & Decoration; Marquardt, Incorporated: Cazenovia, NY, USA, 1944. [Google Scholar]
- Huffman, D.A. Curvature and Creases: A Primer on Paper. IEEE Trans. Comput. 1976, C-25, 1010–1019. [Google Scholar] [CrossRef]
- Demaine, E.D.; Demaine, M.L.; Koschitz, D. Reconstructing David Huffman’s legacy in curved-crease folding. Origami 2011, 5, 39–52. Available online: https://erikdemaine.org/papers/Huffman_Origami5/ (accessed on 14 December 2023).
- Resch, R.D. The space curve as a folded edge. In Computer Aided Geometric Design; Academic Press: Cambridge, MA, USA, 1974; pp. 255–258. [Google Scholar] [CrossRef]
- Lebée, A. From Folds to Structures, a Review. Int. J. Space Struct. 2015, 30, 55–74. [Google Scholar] [CrossRef]
- Tachi, T.; Epps, G. Designing One-DOF mechanisms for architecture by rationalizing curved folding. In Proceedings of the International Symposium on Algorithmic Design for Architecture and Urban Design (ALGODE-AIJ), Tokyo, Japan, 14–16 March 2011; Volume 5, p. 6. [Google Scholar]
- Raducanu, V.A.; Cojocaru, V.D.; Raducanu, D. Structural architectural elements made of curved folded sheet metal. In Proceedings of the Complexity & Simplicity, 34th eCAADe Conference, Oulu, Finland, 24–26 August 2016; Volume 2, p. 409. [Google Scholar] [CrossRef]
- Epps, G. Robofold. Available online: http://www.robofold.com/ (accessed on 23 August 2023).
- Tang, C.; Bo, P.; Wallner, J.; Pottmann, H. Interactive design of developable surfaces. ACM Trans. Graph. 2016, 35, 1–12. [Google Scholar] [CrossRef]
- Origami Pavilion by Tal Friedman Architecture. Available online: https://architizer.com/projects/origami-pavilion-1/ (accessed on 24 January 2024).
- Patkau’s One Fold. Available online: https://www.patkau.ca/projects/one-fold (accessed on 24 January 2024).
- Kobayashi, H.; Kresling, B.; Vincent, J.F.V. The geometry of unfolding tree leaves. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1998, 265, 147–154. [Google Scholar] [CrossRef]
- Lienhard, J.; Schleicher, S.; Poppinga, S.; Masselter, T.; Milwich, M.; Speck, T.; Knippers, J. Flectofin: A hingeless flapping mechanism inspired by nature. Bioinspiration Biomim. 2011, 6, 045001. [Google Scholar] [CrossRef]
- Lienhard, J.; Poppinga, S.; Schleicher, S.; Speck, T.; Knippers, J. Elastic architecture: Nature inspired pliable structures. Des. Nat. V 2010, 138, 469–477. [Google Scholar] [CrossRef]
- Kwok, T.-H.; Wang, C.C.L.; Deng, D.; Zhang, Y.; Chen, Y. Four-Dimensional Printing for Freeform Surfaces: Design Optimization of Origami and Kirigami Structures. J. Mech. Des. 2015, 137, 111413. [Google Scholar] [CrossRef]
- Deng, D.; Chen, Y. Origami-Based Self-Folding Structure Design and Fabrication Using Projection Based Stereolithography. J. Mech. Des. 2014, 137, 021701. [Google Scholar] [CrossRef]
- Deng, D.; Kwok, T.-H.; Chen, Y. Four-Dimensional Printing: Design and Fabrication of Smooth Curved Surface Using Controlled Self-Folding. J. Mech. Des. 2017, 139, 081702. [Google Scholar] [CrossRef]
- Bukauskas, A.; Koronaki, A.; Lee, T.-U.; Ott, D.; Al Asali, M.W.; Jalia, A.; Bashford, T.; Gatóo, A.; Newman, J.; Gattas, J.M.; et al. Curved-crease origami face shields for infection control. PLoS ONE 2021, 16, e0245737. [Google Scholar] [CrossRef] [PubMed]
- RoboFold. (n.d.). Available online: http://www.robofold.com/make/consultancy/projects/bentley-and-kyungeun-ko (accessed on 23 August 2023).
- Andreas Lund Design. Andreaslund.dk. (n.d.). Available online: https://andreaslund.dk (accessed on 23 August 2023).
- Friedman, T. Parametric Architecture—Bridge Bench-a Curved Folded Bench. Talfriedman.com. (n.d.). Available online: https://talfriedman.com/bridge-bench-a-curved-folded-bench (accessed on 23 August 2023).
- Deleo, A.A.; O’Neil, J.; Yasuda, H.; Salviato, M.; Yang, J. Origami-based deployable structures made of carbon fiber reinforced polymer composites. Compos. Sci. Technol. 2020, 191, 108060. [Google Scholar] [CrossRef]
- Soykasap, Ö. Folding design of composite structures. Compos. Struct. 2007, 79, 280–287. [Google Scholar] [CrossRef]
- Al-Mansoori, M.; Khan, K.A.; Cantwell, W.J. Harnessing architected stiffeners to manufacture origami-inspired foldable composite structures. Compos. Sci. Technol. 2020, 200, 108449. [Google Scholar] [CrossRef]
- Hemmerling, M.; Mazzucchi, A. Colonna Curva: A case study on curved folding for the production of architectural components. Blucher Des. Proc. 2016, 3, 677–680. [Google Scholar] [CrossRef][Green Version]
- Mitani, J.; Igarashi, T. Interactive design of planar curved folding by reflection. Pac. Graph. 2011. [Google Scholar] [CrossRef]
- Fuchs, D.; Tabachnikov, S. More on Paperfolding. Am. Math. Mon. 1999, 106, 27–35. [Google Scholar] [CrossRef]
- Kergosien, Y.L.; Gotoda, H.; Kunii, T.L. Bending and creasing virtual paper. IEEE Comput. Graph. Appl. 1994, 14, 40–48. [Google Scholar] [CrossRef]
- Frey, W.H. Modeling buckled developable surfaces by triangulation. Comput.-Aided Des. 2004, 36, 299–313. [Google Scholar] [CrossRef]
- Kilian, M.; Flöry, S.; Chen, Z.; Mitra, N.J.; Sheffer, A.; Pottmann, H. Curved folding. ACM Trans. Graph. 2008, 27, 1–9. [Google Scholar] [CrossRef]
- Tachi, T. Freeform Origami. Available online: www.tsg.ne.jp/TT/software/ (accessed on 23 August 2023).
- Tachi, T. Simulation of rigid origami. In Origami; A. K. Peters, Ltd.: Natick, MA, USA, 2009; Volume 4. [Google Scholar]
- Epps, G. KingKong. Robofold. Available online: http://www.grasshopper3d.com/group/kingkong (accessed on 23 August 2023).
- Piker, D. Kangaroo. Available online: http://www.grasshopper3d.com/group/kangaroo (accessed on 23 August 2023).
- Crane. Food4Rhino. Available online: https://www.food4rhino.com/en/app/crane (accessed on 23 August 2023).
- Karamba3D—Parametric Engineering. (n.d.). Available online: https://www.karamba3d.com/ (accessed on 23 August 2023).
- Sofistik. Sofistik AG. Available online: http://www.sofistik.com/no_cache/en/ (accessed on 23 August 2023).
- Material Properties—Karamba3D 2.2.0. Available online: https://manual.karamba3d.com/3-in-depth-component-reference/3.4-material/3.4.1-material-properties (accessed on 24 January 2024).
- Benyus, J.M. Biomimicry: Innovation Inspired by Nature; Perennial: New York, NY, USA, 2009. [Google Scholar]
- Zari, M.P. Biomimetic approaches to architectural design for increased sustainability. In Proceedings of the SB07 NZ Sustainable Building Conference, Auckland, New Zealand, 14–16 November 2007; pp. 1–10. [Google Scholar]
- Mattheck, C. Design in Nature: Learning from Trees; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Tamke, M.; Stasiuk, D.; Ramsgard Thomsen, M. The Rise—Material Behaviour in Generative Design. In Proceedings of the Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA), Cambridge, ON, Canada, 21–27 October 2013. [Google Scholar] [CrossRef]
- Cui, Z.; Cai, X. Artificial Plant Optimization Algorithm. In Swarm Intelligence and Bio-Inspired Computation; Elsevier: Amsterdam, The Netherlands, 2013; pp. 351–365. [Google Scholar] [CrossRef]
- Dutta, G.S.; Steuernagel, L.; Meiners, D. Generative Design Solutions for Free-Form Structures Based on Biomimicry. In Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2020; pp. 122–134. [Google Scholar] [CrossRef]
- Dutta, G.S.; Meiners, D.; Merkert, N. A Study of Free-Form Shape Rationalization Using Biomimicry as Inspiration. Polymers 2023, 15, 2466. [Google Scholar] [CrossRef]
- Omnexus. Acrylonitrile Butadiene Styrene (ABS Plastic): Uses, Properties & Structure. Available online: https://omnexus.specialchem.com/selection-guide/acrylonitrile-butadiene-styrene-abs-plastic (accessed on 26 January 2024).
- Omnexus. Thermoplastic Polyurethane (TPU) Material: Properties & Applications. Available online: https://omnexus.specialchem.com/selection-guide/thermoplastic-polyurethanes-tpu (accessed on 26 January 2024).
- PETG Technical Data Sheet. Available online: https://www.iemai3d.com/wp-content/uploads/2021/03/PETG_TDS_EN.pdf (accessed on 26 January 2024).
- L-FLAXDRY-BL550-30. Ecotechnilin. Available online: https://eco-technilin.com/en/flaxdry/79-L-FLAXDRY-BL550-30.html (accessed on 26 January 2024).
- PA 6 GF Sheet. Polyamide. Available online: https://www.muellerbestellung.de/10-50-mm-PA-6-GF-Sheet-Selectable-dim-Polyamide (accessed on 26 January 2024).
- UHU Technical Data Sheet. Available online: https://www.uhu.com/content/dam/boltonadhesives/products/import/57/en/62266/50.pdf (accessed on 26 January 2024).
- PVC Sheet. Available online: https://www.architekturbedarf.de/plastics/pvc-white/pvc-white-495-x-1000-x-20-mm (accessed on 26 January 2024).
- Polypropylene (PP) Adhesive Strapping and Protection Tape—ADEZIF PP420. Available online: https://www.adezif.com/single-sided-polypropylene-adhesive-tape-adezif-ps120 (accessed on 26 January 2024).
- Li, Y.; Zhang, H.; Peijs, T.; Bilotti, E. Graphene delivery systems for hierarchical fiber reinforced composites. MRS Adv. 2016, 1, 1339–1344. [Google Scholar] [CrossRef]
- EPIKOTE™ Resin MGS ® RIMR035c Technical Data Sheet. Available online: https://shop.swiss-composite.ch/shop/resources/downloads/ZZB101004/t-epikote-rimr-035c-e.pdf (accessed on 26 January 2024).
- Carbongew. 796UD 270g/m2. Suter Kunststoffe AG. Available online: https://shop.swiss-composite.ch/shop/resources/downloads/t-Carbon-ECC_Style796_E.pdf (accessed on 29 January 2024).
- Carbon Gelege UD, 320g/m2. Available online: https://www.carbon-shop.at/produkt/carbon-gelebe-ud-320gm%C2%B2 (accessed on 29 January 2024).






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Curved Crease | Curved-Crease Length (cm) | Deformation Coefficient ξ |
|---|---|---|
| 3-pt NURB curve | 12 | 1.78 |
| Evolved curve | 12.24 | 1.72 |
| 3-pt circular arc | 12.25 | 2.11 |
| Catenary | 12.1 | 1.82 |
| Ellipse section | 12.76 | 2.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dutta, G.S.; Meiners, D.; Ziegmann, G. A Study of Deployable Structures Based on Nature Inspired Curved-Crease Folding. Polymers 2024, 16, 766. https://doi.org/10.3390/polym16060766
Dutta GS, Meiners D, Ziegmann G. A Study of Deployable Structures Based on Nature Inspired Curved-Crease Folding. Polymers. 2024; 16(6):766. https://doi.org/10.3390/polym16060766
Chicago/Turabian StyleDutta, Gaurab Sundar, Dieter Meiners, and Gerhard Ziegmann. 2024. "A Study of Deployable Structures Based on Nature Inspired Curved-Crease Folding" Polymers 16, no. 6: 766. https://doi.org/10.3390/polym16060766
APA StyleDutta, G. S., Meiners, D., & Ziegmann, G. (2024). A Study of Deployable Structures Based on Nature Inspired Curved-Crease Folding. Polymers, 16(6), 766. https://doi.org/10.3390/polym16060766