
Transient Response of Macroscopic Deformation of Magnetoactive Elastomeric Cylinders in Uniform Magnetic Fields



Abstract
1. Introduction
2. Materials and Methods
2.1. MAE Cylinders
2.2. Experimental Setup
2.3. Image Processing
2.4. Measurement Protocol
3. Results and Discussion
3.1. Slew Rate Dependence
3.2. Dependence on the Maximum Value of Magnetic Field
4. Conclusions
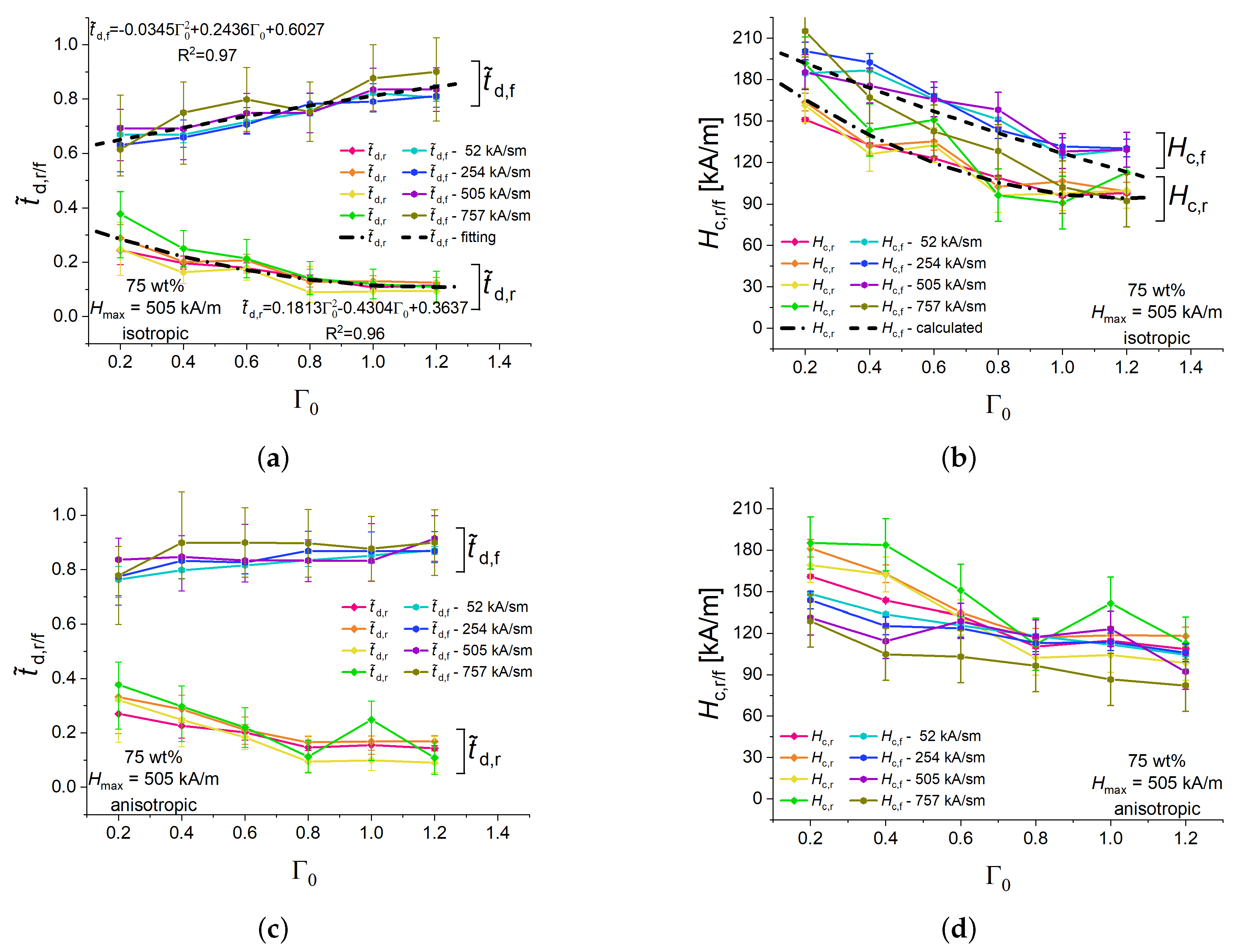
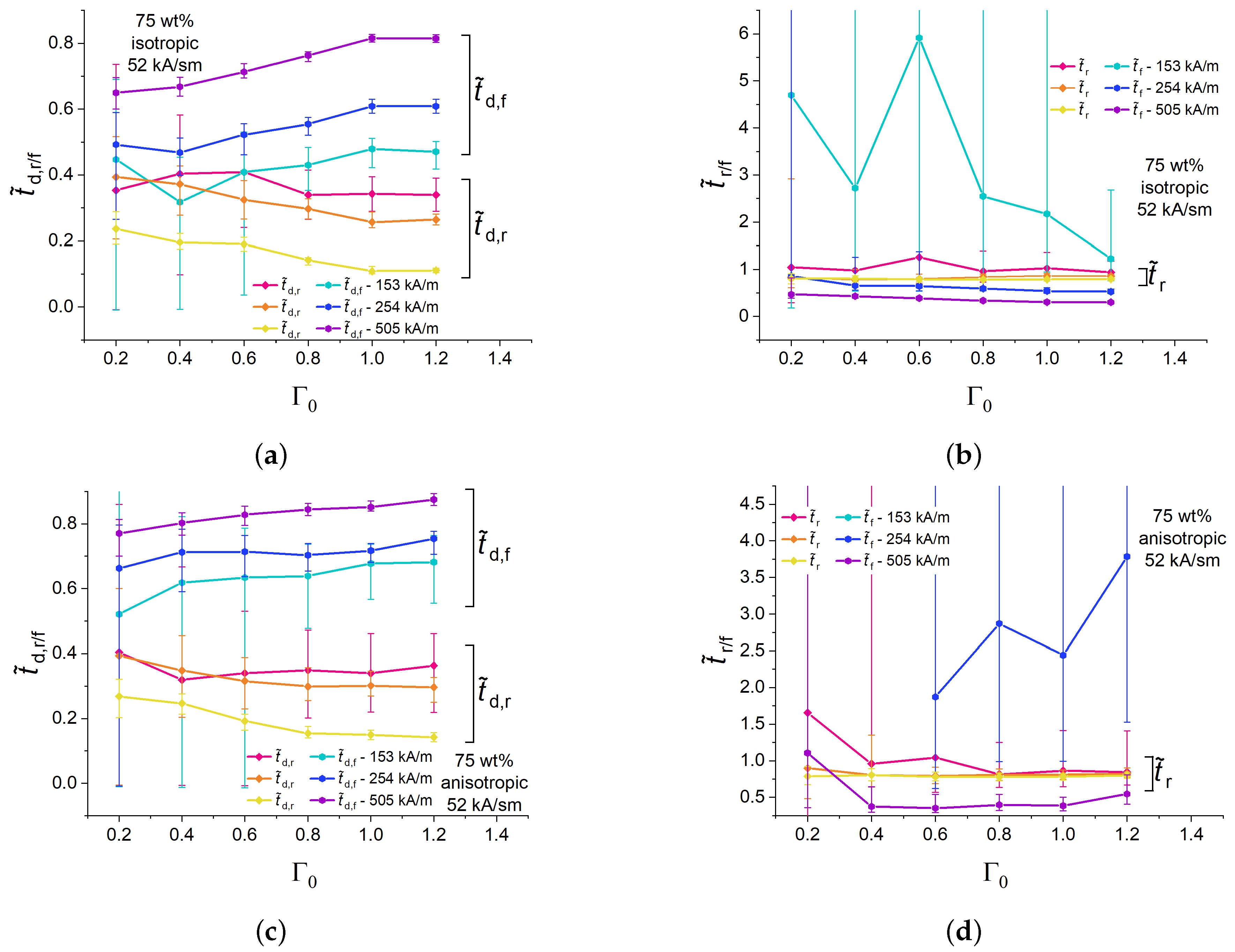
- Introduced delay times of the magnetostrictive strain response for the increasing (ascending) and descending (decreasing) parts of magnetic fields were different in a particular experimental setting. For two higher magnetic field slew rates (505 kA/(s·m) and 757 kA/(s·m)) and otherwise the same experimental parameters, the delay time for the falling part of magnetic field was lower than the delay time for the rising magnetic field. Typically, , for isotropic samples (Figure 5a).
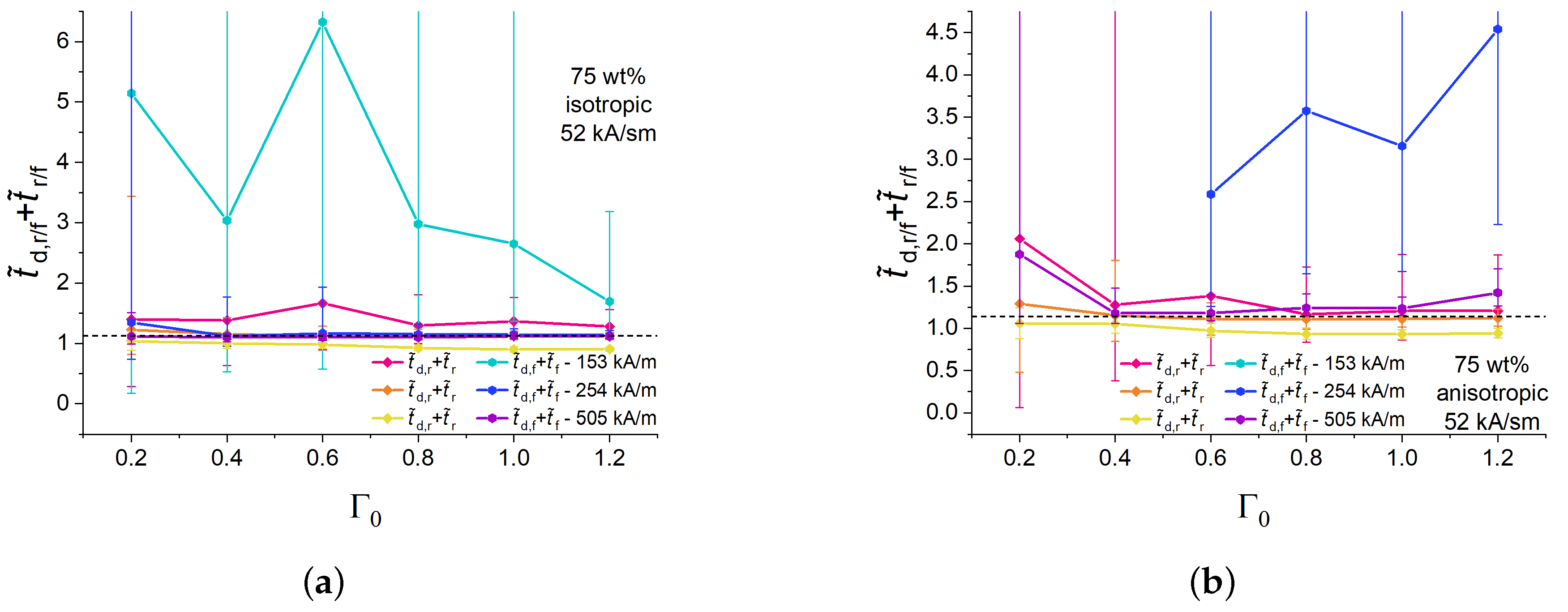
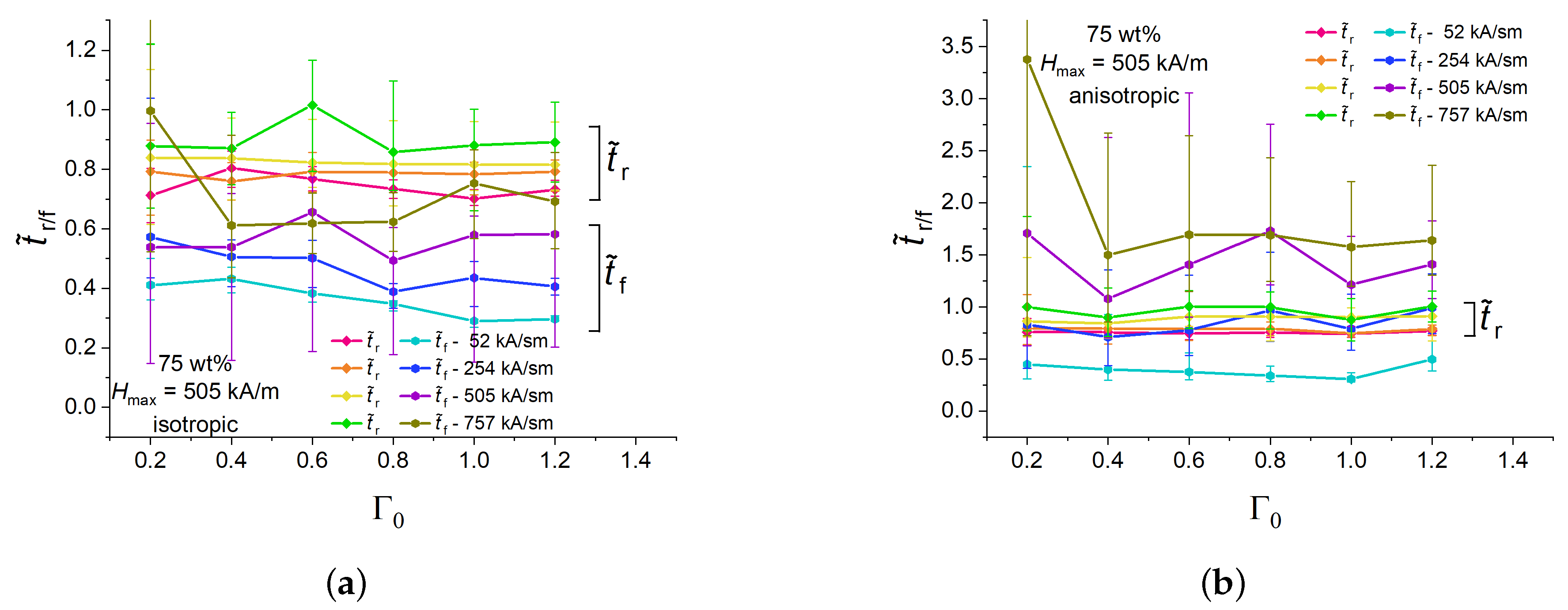
- Introduced rise and fall times of the magnetostrictive strain response for the increasing (ascending) and descending (decreasing) parts of magnetic fields were different in a particular experimental setting. For isotropic samples and otherwise the same experimental parameters, the rise time for the ascending part of magnetic field was higher than the fall time for the descending magnetic field. Typically, , for isotropic samples (Figure 6a).
- Characteristic times of anisotropic specimens were similar to those of their isotropic counterparts except for the falling time constant , which was significantly higher in anisotropic samples than in isotropic samples (Figure 6b). This effect was particularly pronounced at the highest magnetic field rate of 757 kA/(s·m).
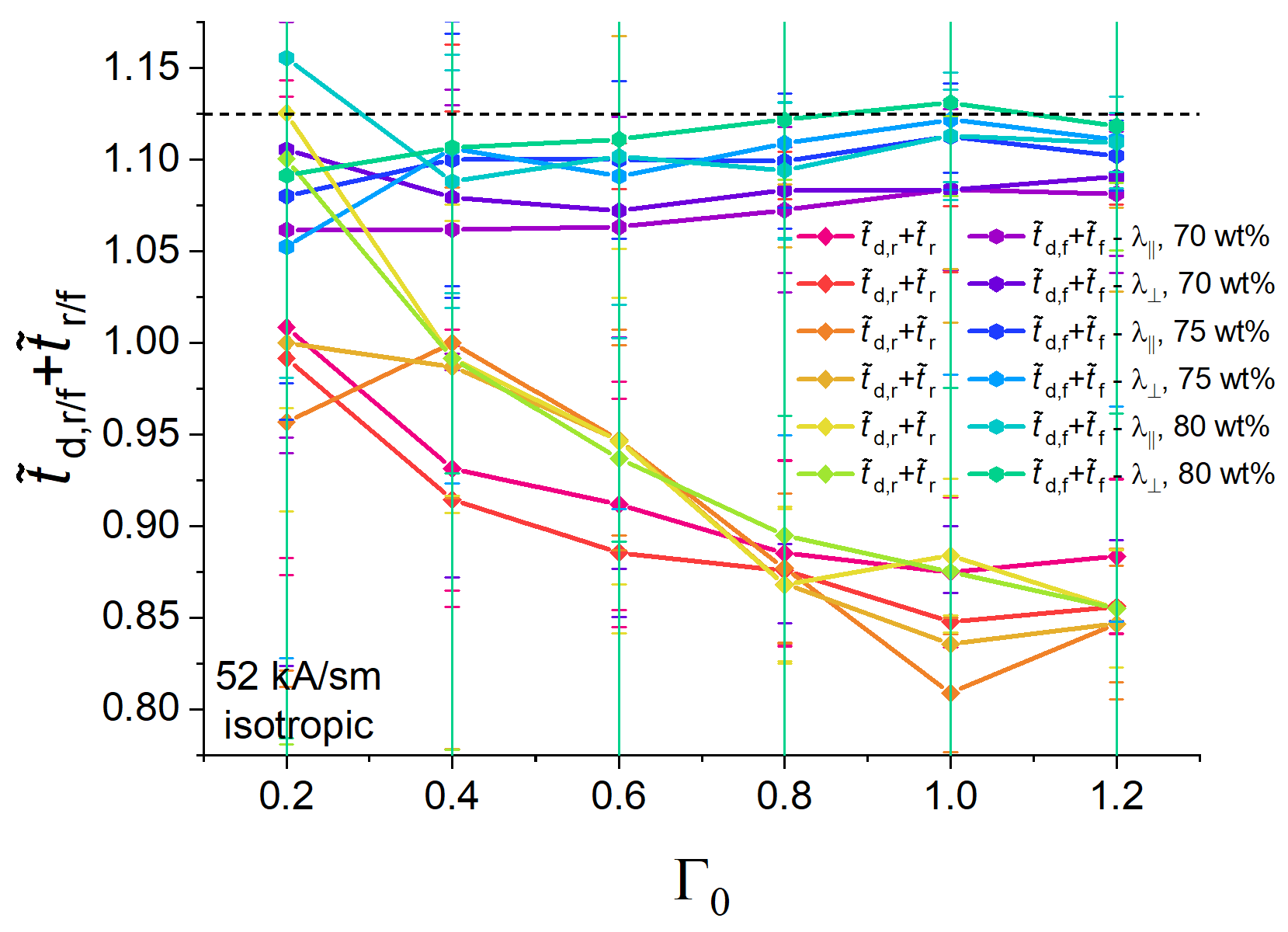
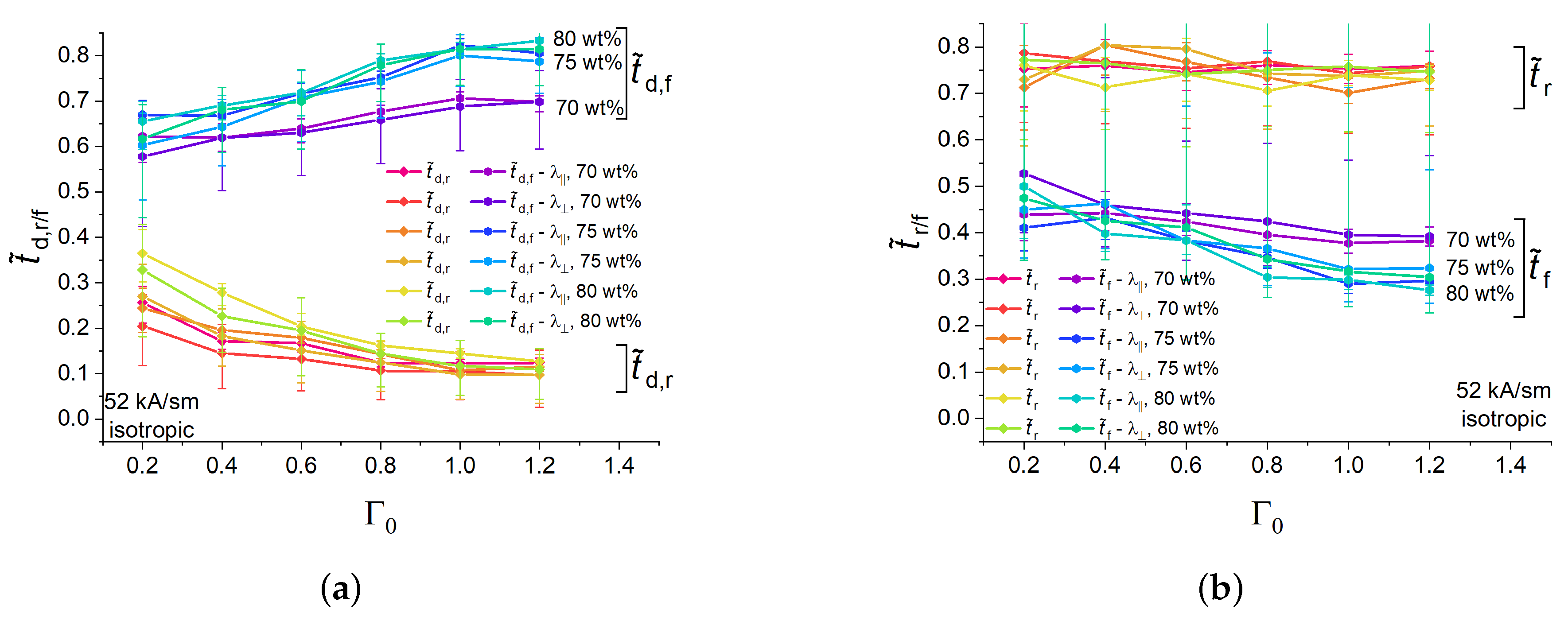
- At the same experimental conditions, the characteristic times of specimens with 80 and 75 wt% of iron were very close, while the characteristic times , for the falling part of magnetic field of the specimen with 70 wt% of iron were different from those (Figure 7).
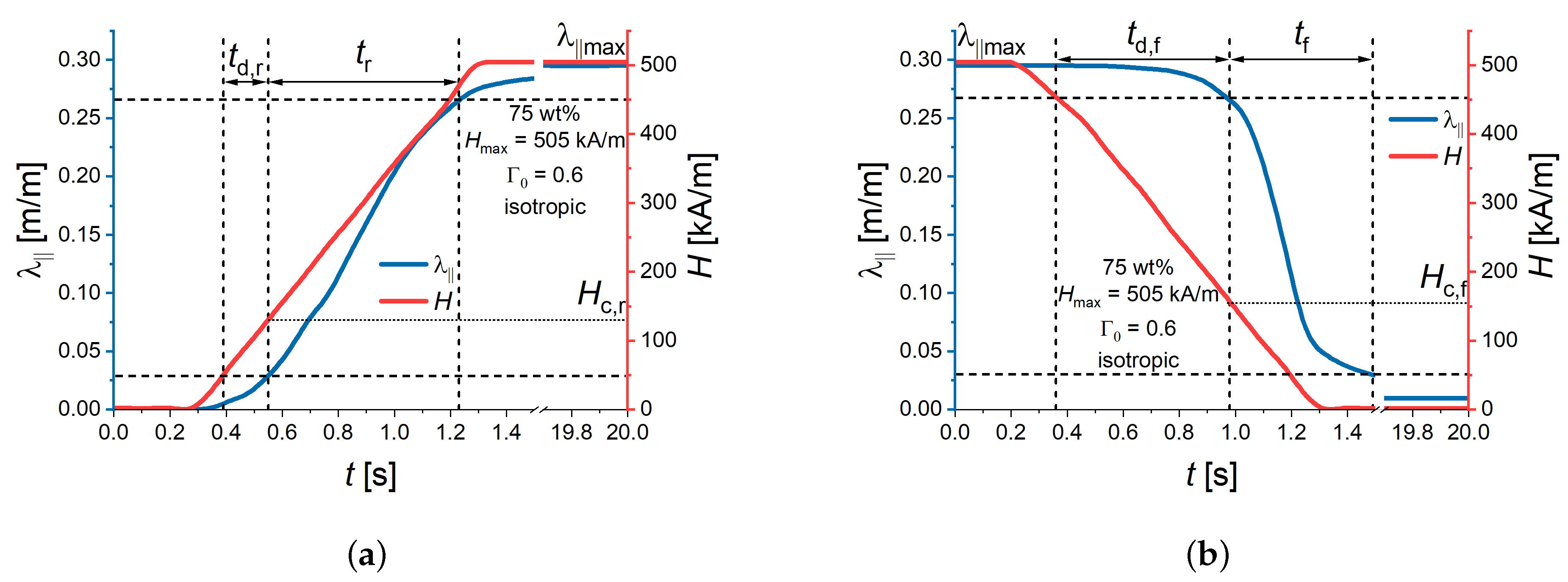
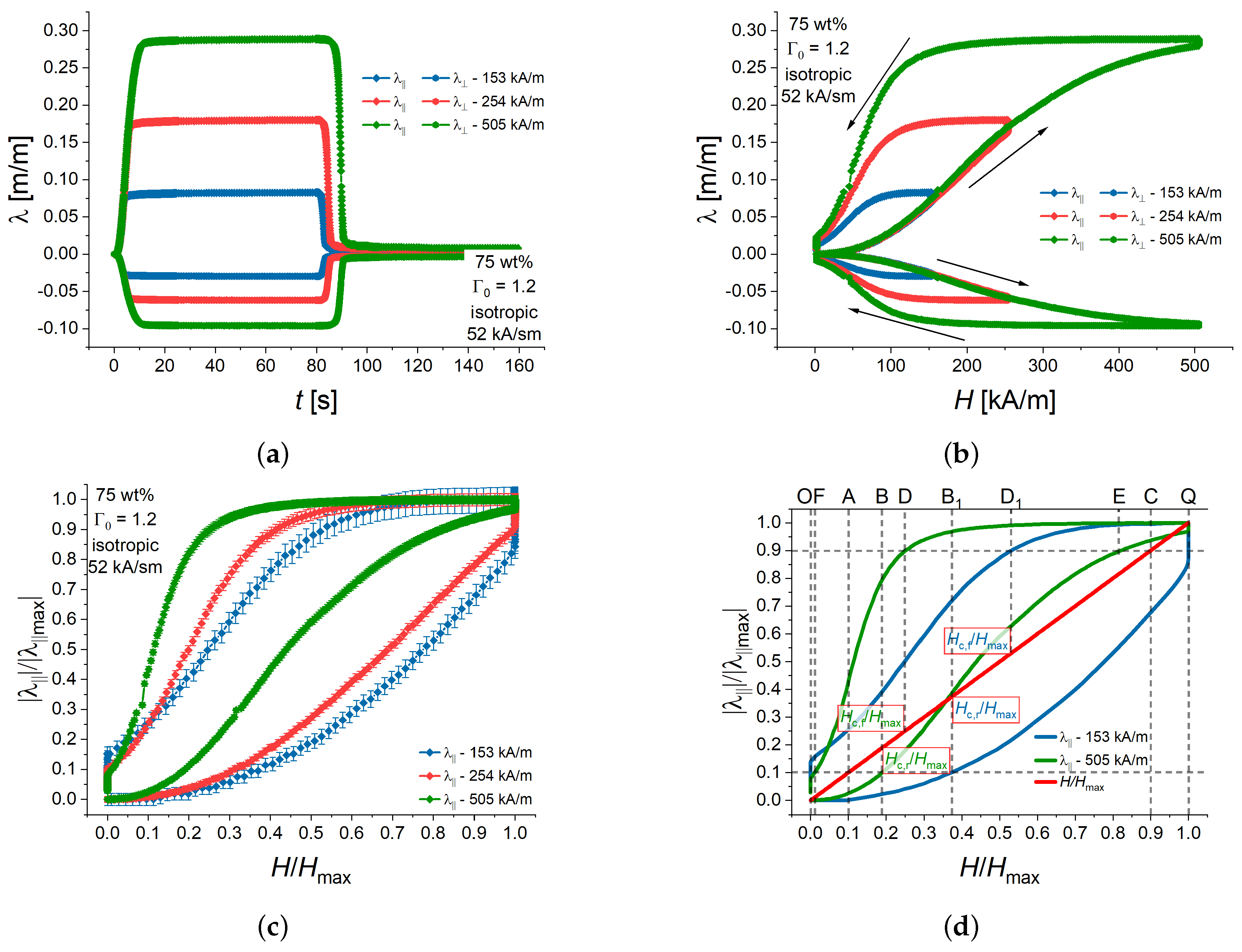
- A new graphical method for deducing the normalized delay times from the normalized magnetostrictive hysteresis curves has been presented (Figure 8d). The changes in the characteristic response times for different maximum values of magnetic field have been explained by the changing shape of the magnetostrictive hysteresis loop.
- At a fixed magnetic field rate of 52 kA/(s·m) and sufficiently high aspect ratio, increased with decreasing magnetic field amplitude , while decreased. strongly decreased with increasing magnetic field amplitude , while the decrease in was minor (Figure 9).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

Appendix C

References
- Elhajjar, R.; Law, C.T.; Pegoretti, A. Magnetostrictive polymer composites: Recent advances in materials, structures and properties. Prog. Mater. Sci. 2018, 97, 204–229. [Google Scholar] [CrossRef]
- Romeis, D.; Toshchevikov, V.; Saphiannikova, M. Effects of local rearrangement of magnetic particles on deformation in magneto-sensitive elastomers. Soft Matter 2019, 15, 3552–3564. [Google Scholar] [CrossRef] [PubMed]
- Stolbov, O.V.; Raikher, Y.L. Magnetostriction effect in soft magnetic elastomers. Arch. Appl. Mech. 2019, 89, 63–76. [Google Scholar] [CrossRef]
- Sánchez, P.A.; Stolbov, O.V.; Kantorovich, S.S.; Raikher, Y.L. Modeling the magnetostriction effect in elastomers with magnetically soft and hard particles. Soft Matter 2019, 15, 7145–7158. [Google Scholar] [CrossRef] [PubMed]
- Kalina, K.A.; Metsch, P.; Brummund, J.; Kästner, M. A macroscopic model for magnetorheological elastomers based on microscopic simulations. Int. J. Solids Struct. 2020, 193–194, 200–212. [Google Scholar] [CrossRef]
- Saveliev, D.V.; Belyaeva, I.A.; Chashin, D.V.; Fetisov, L.Y.; Romeis, D.; Kettl, W.; Kramarenko, E.Y.; Saphiannikova, M.; Stepanov, G.V.; Shamonin, M. Giant Extensional Strain of Magnetoactive Elastomeric Cylinders in Uniform Magnetic Fields. Materials 2020, 13, 3297. [Google Scholar] [CrossRef] [PubMed]
- Bastola, A.K.; Hossain, M. The shape—Morphing performance of magnetoactive soft materials. Mater. Des. 2021, 211, 110172. [Google Scholar] [CrossRef]
- Silva, J.; Gouveia, C.; Dinis, G.; Pinto, A.; Pereira, A. Giant magnetostriction in low-concentration magnetorheological elastomers. Compos. Part B Eng. 2022, 243, 110125. [Google Scholar] [CrossRef]
- Balogh, D.; Guba, S.; Horváth, B.; Szalai, I. Magnetic Field-Induced Deformation of Isotropic Magnetorheological Elastomers. Magnetochemistry 2022, 8, 146. [Google Scholar] [CrossRef]
- Tasin, M.A.; Aziz, S.A.A.; Mazlan, S.A.; Johari, M.A.F.; Nordin, N.A.; Yusuf, S.Y.M.; Choi, S.B.; Bahiuddin, I. Magnetostriction Enhancement in Midrange Modulus Magnetorheological Elastomers for Sensor Applications. Micromachines 2023, 14, 767. [Google Scholar] [CrossRef]
- Glavan, G.; Belyaeva, I.A.; Drevenšek-Olenik, I.; Shamonin, M. Experimental study of longitudinal, transverse and volume strains of magnetoactive elastomeric cylinders in uniform magnetic fields. J. Magn. Magn. Mater. 2023, 579, 170826. [Google Scholar] [CrossRef]
- Roghani, M.; Romeis, D.; Saphiannikova, M. Effect of microstructure evolution on the mechanical behavior of magneto-active elastomers with different matrix stiffness. Soft Matter 2023, 19, 6387–6398. [Google Scholar] [CrossRef]
- Goh, S.; Menzel, A.M.; Wittmann, R.; Löwen, H. Density functional approach to elastic properties of three-dimensional dipole-spring models for magnetic gels. J. Chem. Phys. 2023, 158, 054909. [Google Scholar] [CrossRef]
- Ubaidillah; Sutrisno, J.; Purwanto, A.; Mazlan, S.A. Recent Progress on Magnetorheological Solids: Materials, Fabrication, Testing, and Applications. Adv. Eng. Mater. 2015, 17, 563–597. [Google Scholar] [CrossRef]
- Menzel, A.M. Tuned, driven, and active soft matter. Phys. Rep. 2015, 554, 1–45. [Google Scholar] [CrossRef]
- Lopez-Lopez, M.T.; Durán, J.D.G.; Iskakova, L.Y.; Zubarev, A.Y. Mechanics of Magnetopolymer Composites: A Review. J. Nanofluids 2016, 5, 479–495. [Google Scholar] [CrossRef]
- Weeber, R.; Hermes, M.; Schmidt, A.M.; Holm, C. Polymer architecture of magnetic gels: A review. J. Phys. Condens. Matter 2018, 30, 063002. [Google Scholar] [CrossRef]
- Bastola, A.K.; Paudel, M.; Li, L.; Li, W. Recent progress of magnetorheological elastomers: A review. Smart Mater. Struct. 2020, 29, 123002. [Google Scholar] [CrossRef]
- Odenbach, S. (Ed.) Magnetic Hybrid-Materials: Multi-Scale Modelling, Synthesis, and Applications; Walter de Gruyter GmbH & Co KG: Berlin, Germany, 2021. [Google Scholar] [CrossRef]
- Nadzharyan, T.A.; Shamonin, M.; Kramarenko, E.Y. Theoretical Modeling of Magnetoactive Elastomers on Different Scales: A State-of-the-Art Review. Polymers 2022, 14, 4096. [Google Scholar] [CrossRef] [PubMed]
- Kostrov, S.A.; Marshall, J.H.; Maw, M.; Sheiko, S.S.; Kramarenko, E.Y. Programming and Reprogramming the Viscoelasticity and Magnetic Response of Magnetoactive Thermoplastic Elastomers. Polymers 2023, 15, 4607. [Google Scholar] [CrossRef] [PubMed]
- Domenjoud, M.; Berthelot, E.; Galopin, N.; Corcolle, R.; Bernard, Y.; Daniel, L. Characterization of giant magnetostrictive materials under static stress: Influence of loading boundary conditions. Smart Mater. Struct. 2019, 28, 095012. [Google Scholar] [CrossRef]
- Boyraz, P.; Runge, G.; Raatz, A. An Overview of Novel Actuators for Soft Robotics. Actuators 2018, 7, 48. [Google Scholar] [CrossRef]
- Bernat, J.; Gajewski, P.; Kołota, J.; Marcinkowska, A. Review of Soft Actuators Controlled with Electrical Stimuli: IPMC, DEAP, and MRE. Appl. Sci. 2023, 13, 1651. [Google Scholar] [CrossRef]
- Buschow, K.H.J.; Boer, F.R. Physics of Magnetism and Magnetic Materials; Springer: New York, NY, USA, 2003; Volume 7, pp. 171–175. [Google Scholar] [CrossRef]
- Ivaneyko, D.; Toshchevikov, V.; Saphiannikova, M.; Heinrich, G. Mechanical properties of magneto-sensitive elastomers: Unification of the continuum-mechanics and microscopic theoretical approaches. Soft Matter 2014, 10, 2213–2225. [Google Scholar] [CrossRef] [PubMed]
- Dapino, M.J. Magnetostrictive Materials. In Encyclopedia of Smart Materials; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002. [Google Scholar] [CrossRef]
- Belyaeva, I.A.; Kramarenko, E.Y.; Stepanov, G.V.; Sorokin, V.V.; Stadler, D.; Shamonin, M. Transient magnetorheological response of magnetoactive elastomers to step and pyramid excitations. Soft Matter 2016, 12, 2901–2913. [Google Scholar] [CrossRef] [PubMed]
- Wen, Q.; Wang, Y.; Feng, J.; Gong, X. Transient response of magnetorheological elastomers to step magnetic field. Appl. Phys. Lett. 2018, 113, 081902. [Google Scholar] [CrossRef]
- Selzer, L.; Odenbach, S. Empirical Law for the Magnetorheological Effect of Nanocomposite Hydrogels with Magnetite Microparticles. Gels 2023, 9, 182. [Google Scholar] [CrossRef]
- Selzer, L.; Odenbach, S. Mechanism for the Magnetorheological Effect of Nanocomposite Hydrogels with Magnetite Microparticles. Gels 2023, 9, 218. [Google Scholar] [CrossRef]
- Belyaeva, I.A.; Kramarenko, E.Y.; Shamonin, M. Magnetodielectric effect in magnetoactive elastomers: Transient response and hysteresis. Polymer 2017, 127, 119–128. [Google Scholar] [CrossRef]
- Kubík, M.; Borin, D.; Odenbach, S. Transient dynamics of the field induced force in the isotropic magnetorheological elastomer. Smart Mater. Struct. 2023, 32, 065016. [Google Scholar] [CrossRef]
- Johnson, B.K.; Sundaram, V.; Naris, M.; Acome, E.; Ly, K.; Correll, N.; Keplinger, C.; Humbert, J.S.; Rentschler, M.E. Identification and Control of a Nonlinear Soft Actuator and Sensor System. IEEE Robot. Autom. Lett. 2020, 5, 3783–3790. [Google Scholar] [CrossRef]
- Rothemund, P.; Kirkman, S.; Keplinger, C. Dynamics of electrohydraulic soft actuators. Proc. Natl. Acad. Sci. USA 2020, 117, 16207–16213. [Google Scholar] [CrossRef] [PubMed]
- Mazurek, P.; Vudayagiri, S.; Skov, A.L. How to tailor flexible silicone elastomers with mechanical integrity: A tutorial review. Chem. Soc. Rev. 2019, 48, 1448–1464. [Google Scholar] [CrossRef] [PubMed]
- Sorokin, V.V.; Belyaeva, I.A.; Shamonin, M.; Kramarenko, E.Y. Magnetorheological response of highly filled magnetoactive elastomers from perspective of mechanical energy density: Fractal aggregates above the nanometer scale? Phys. Rev. E 2017, 95, 062501. [Google Scholar] [CrossRef]
- Glavan, G.; Belyaeva, I.A.; Ruwisch, K.; Wollschläger, J.; Shamonin, M. Magnetoelectric Response of Laminated Cantilevers Comprising a Magnetoactive Elastomer and a Piezoelectric Polymer, in Pulsed Uniform Magnetic Fields. Sensors 2021, 21, 6390. [Google Scholar] [CrossRef] [PubMed]
- Horváth, B.; Szalai, I. Magnetic susceptibility and response time of isotropic and structured magnetorheological elastomers. J. Intell. Mater. Syst. Struct. 2023, 34, 706–716. [Google Scholar] [CrossRef]
- Kubík, M.; Válek, J.; Žáček, J.; Jeniš, F.; Borin, D.; Strecker, Z.; Mazůrek, I. Transient response of magnetorheological fluid on rapid change of magnetic field in shear mode. Sci. Rep. 2022, 12, 10612. [Google Scholar] [CrossRef]
- Szewczyk, R. Model of the Magnetostrictive Hysteresis Loop with Local Maximum. Materials 2019, 12, 105. [Google Scholar] [CrossRef]
- Wan, Y.; Fang, D.; Hwang, K.C. Non-linear constitutive relations for magnetostrictive materials. Int. J. -Non-Linear Mech. 2003, 38, 1053–1065. [Google Scholar] [CrossRef]
- 181-2011; IEEE Standard for Transitions, Pulses, and Related Waveforms (Revision of IEEE Std 181-2003). IEEE: Piscataway, NJ, USA, 2011; pp. 1–71. [CrossRef]
- Engelberg, S. A Mathematical Introduction to Control Theory; Imperial College Press: London, UK, 2005. [Google Scholar]
- Zubarev, A.; Chirikov, D.; Stepanov, G.; Borin, D.; Lopez-Lopez, M. On the theory of hysteretic magnetostriction of soft ferrogels. Phys. A Stat. Mech. Its Appl. 2018, 498, 86–95. [Google Scholar] [CrossRef]
- Belyaeva, I.A.; Klepp, J.; Lemmel, H.; Shamonin, M. Feasibility of Probing the Filler Restructuring in Magnetoactive Elastomers by Ultra-Small-Angle Neutron Scattering. Appl. Sci. 2021, 11, 4470. [Google Scholar] [CrossRef]
- Chen, K.; Watanabe, M.; Takeda, Y.; Maruyama, T.; Uesugi, M.; Takeuchi, A.; Suzuki, M.; Uesugi, K.; Yasutake, M.; Kawai, M.; et al. In situ observation of the movement of magnetic particles in polyurethane elastomer Densely Packed Magnetic Particles Using Synchrotron Radiation X-ray Computed Tomography. Langmuir 2022, 38, 13497–13505. [Google Scholar] [CrossRef] [PubMed]
- Beleggia, M.D.G.M.; Millev, Y. Demagnetization factors of the general ellipsoid: An alternative to the Maxwell approach. Philos. Mag. 2006, 86, 2451–2466. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [A/s] | [kA/(s·m)] |
|---|---|
| 1 | 52 ± 1 |
| 5 | 254 ± 6 |
| 10 | 505 ± 13 |
| 15 | 757 ± 19 |
| [A] | [kA/m] |
|---|---|
| 3 | 153 |
| 5 | 254 |
| 10 | 505 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glavan, G.; Belyaeva, I.A.; Shamonin, M. Transient Response of Macroscopic Deformation of Magnetoactive Elastomeric Cylinders in Uniform Magnetic Fields. Polymers 2024, 16, 586. https://doi.org/10.3390/polym16050586
Glavan G, Belyaeva IA, Shamonin M. Transient Response of Macroscopic Deformation of Magnetoactive Elastomeric Cylinders in Uniform Magnetic Fields. Polymers. 2024; 16(5):586. https://doi.org/10.3390/polym16050586
Chicago/Turabian StyleGlavan, Gašper, Inna A. Belyaeva, and Mikhail Shamonin. 2024. "Transient Response of Macroscopic Deformation of Magnetoactive Elastomeric Cylinders in Uniform Magnetic Fields" Polymers 16, no. 5: 586. https://doi.org/10.3390/polym16050586
APA StyleGlavan, G., Belyaeva, I. A., & Shamonin, M. (2024). Transient Response of Macroscopic Deformation of Magnetoactive Elastomeric Cylinders in Uniform Magnetic Fields. Polymers, 16(5), 586. https://doi.org/10.3390/polym16050586