
Damage Localization, Identification and Evolution Studies during Quasi-Static Indentation of CFRP Composite Using Acoustic Emission



Abstract
:
1. Introduction
2. Experimental Procedure
2.1. Material Manufacture
2.2. PLB Test and AE Setup
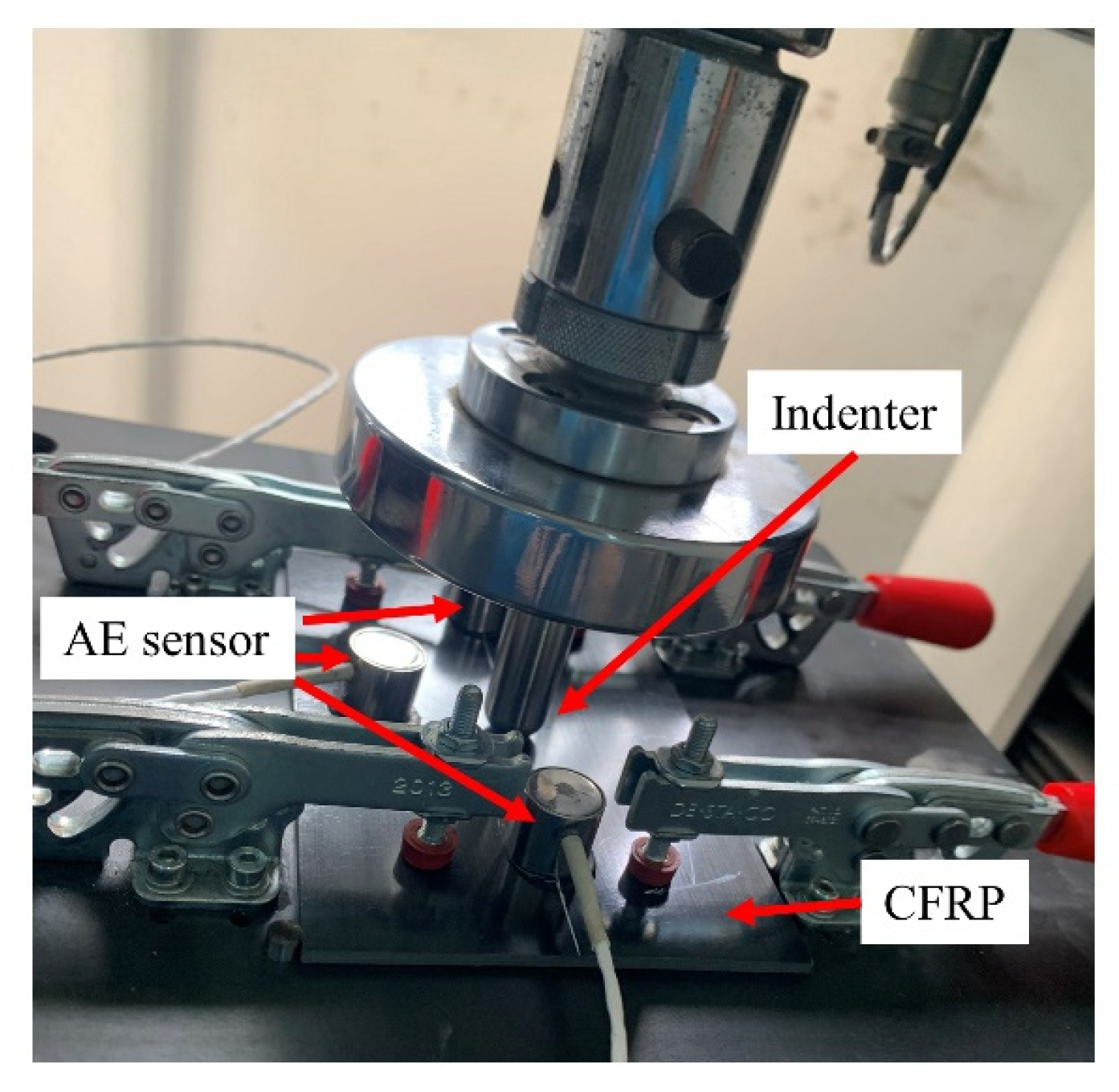
2.3. Quasi-Static Indentation (QSI) Test Method
3. The Enhanced Delta-T Localization Method
3.1. Methodology
3.2. Localization Case Study
4. Experimental Results and Discussion
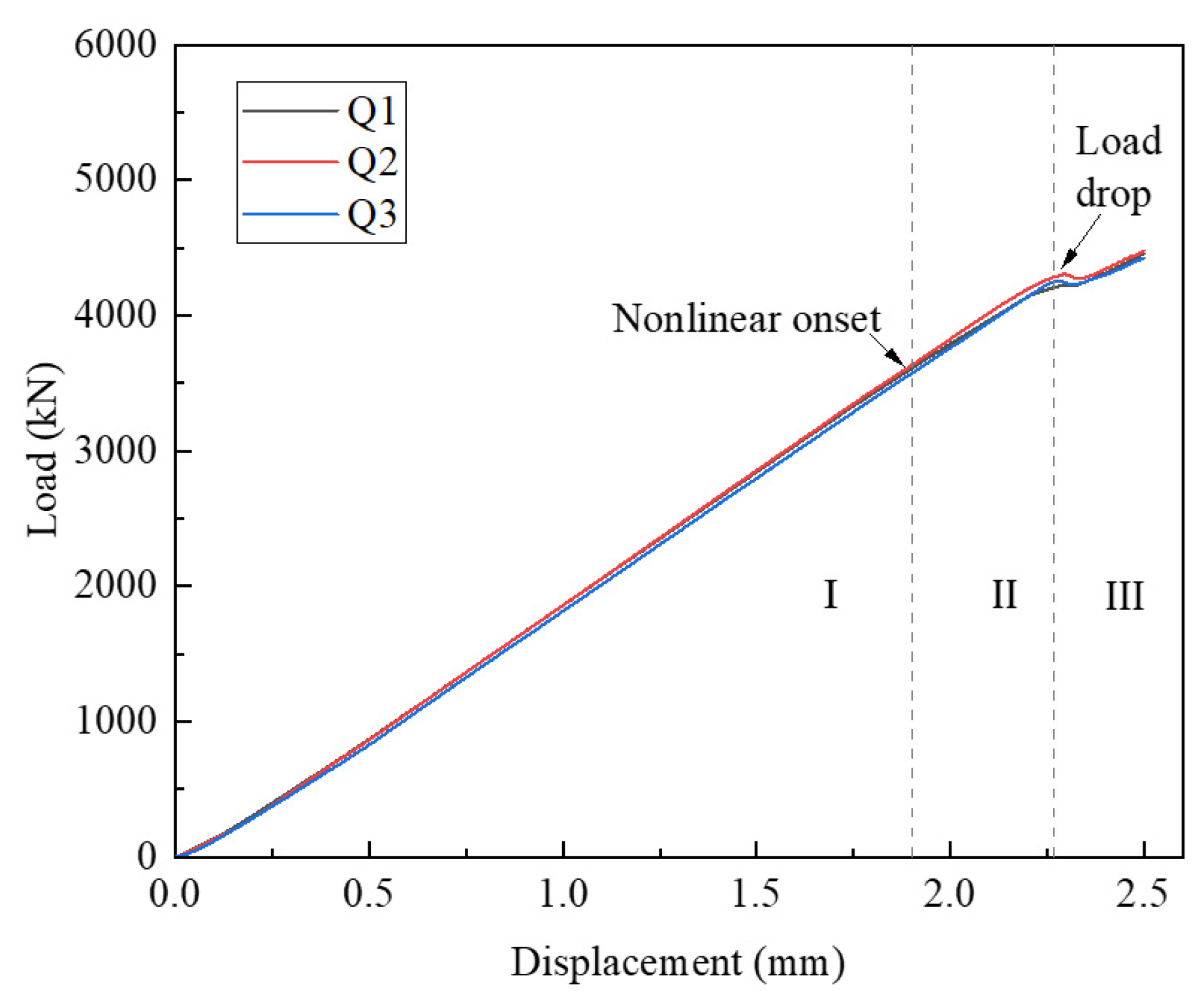
4.1. QSI Mechanical Response
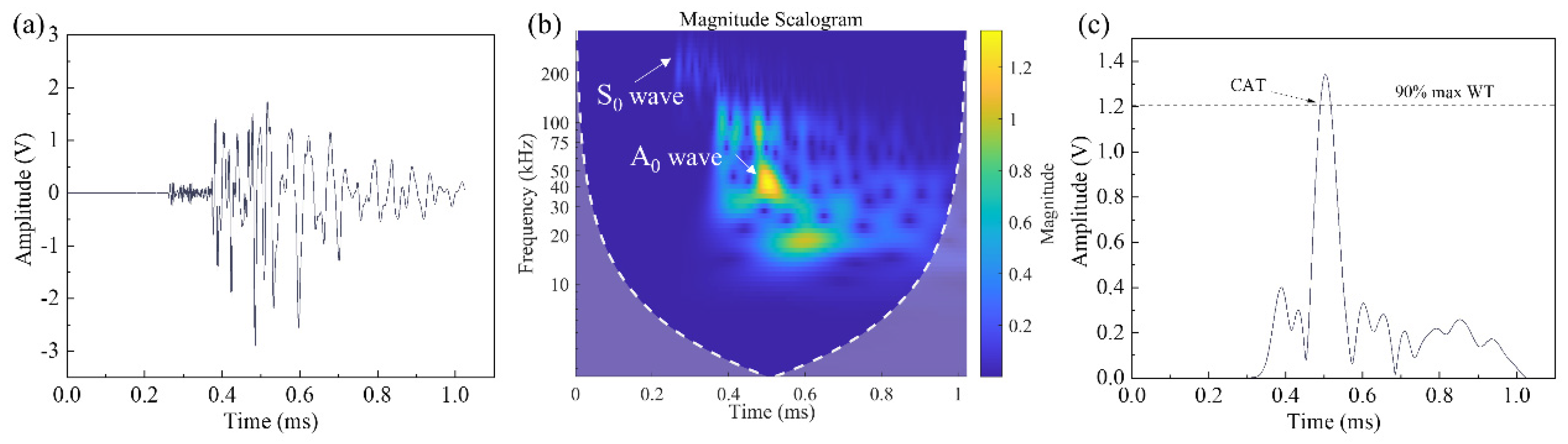
4.2. Damage Identification Based on CWT
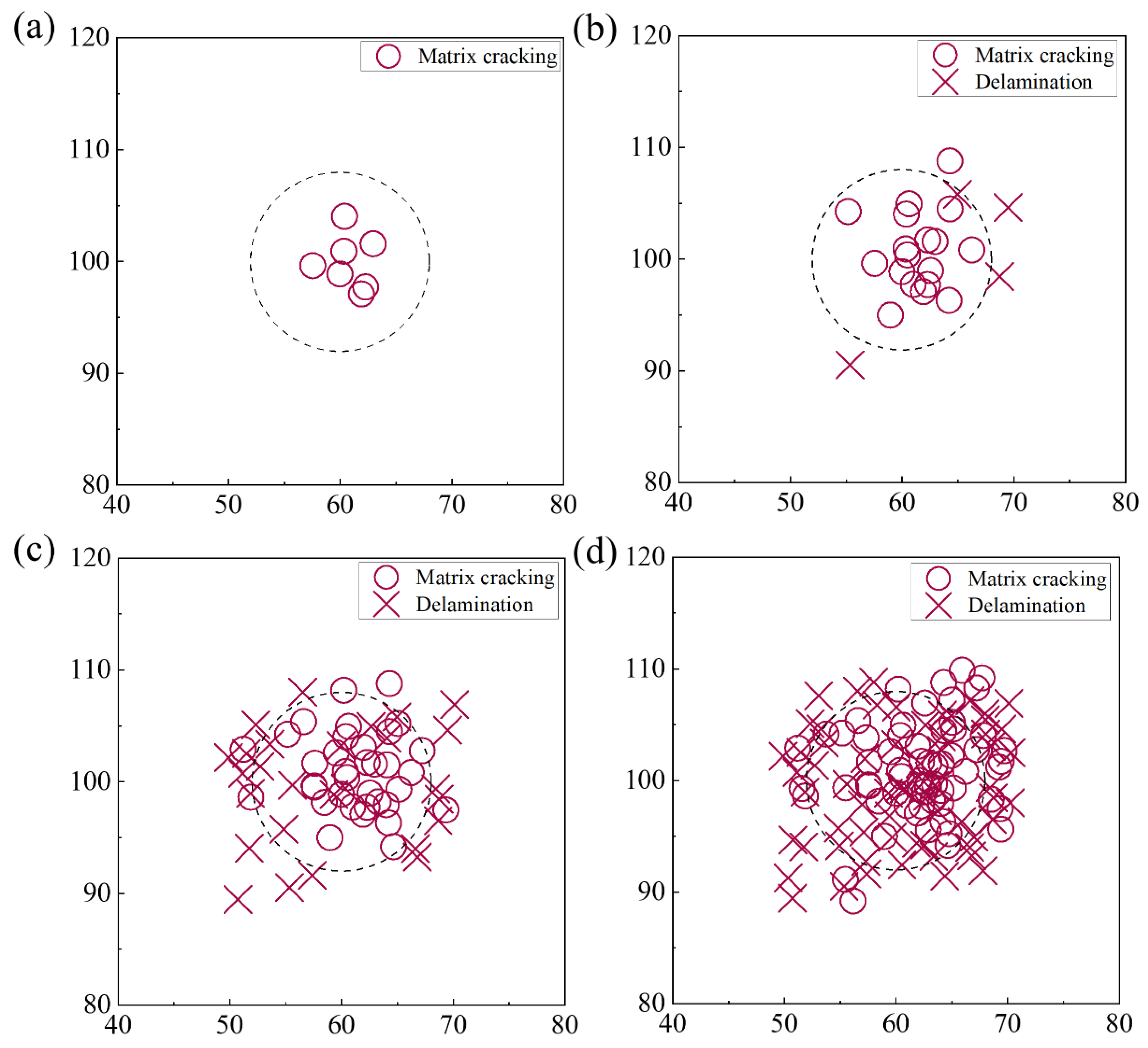
4.3. Evolution of Matrix Cracking and Delamination
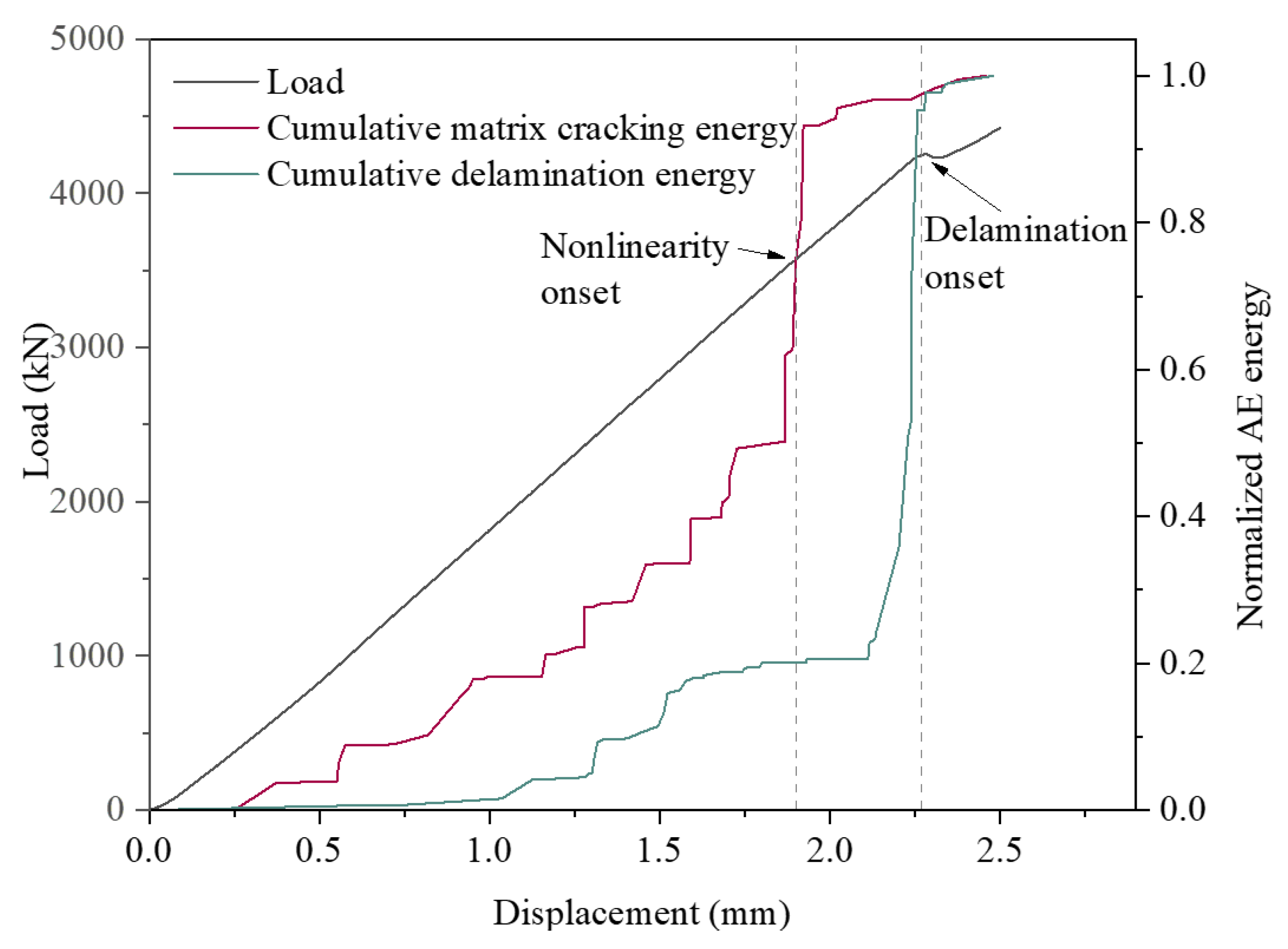
4.4. Damage Energy Evolution during QSI
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Aly, K.; Bradford, P.D. Real-time impact damage sensing and localization in composites through embedded aligned carbon nanotube sheets. Compos. Part B Eng. 2019, 162, 522–531. [Google Scholar] [CrossRef]
- Sha, G.; Radzienski, M.; Soman, R.; Cao, M.; Ostachowicz, W.; Xu, W. Multiple damage detection in laminated composite beams by data fusion of Teager energy operator-wavelet transform mode shapes. Compos. Struct. 2020, 235, 111798. [Google Scholar] [CrossRef]
- Habibi, M.; Abbassi, F.; Laperrière, L. Quasi-static indentation and acoustic emission to analyze failure and damage of bio-composites subjected to low-velocity impact. Compos. Part A Appl. Sci. Manuf. 2022, 158, 106976. [Google Scholar] [CrossRef]
- Bull, D.; Spearing, S.; Sinclair, I. Investigation of the response to low velocity impact and quasi-static indentation loading of particle-toughened carbon-fibre composite materials. Compos. Part A Appl. Sci. Manuf. 2015, 74, 38–46. [Google Scholar] [CrossRef]
- Saeedifar, M.; Najafabadi, M.A.; Zarouchas, D.; Toudeshky, H.H.; Jalalvand, M. Barely visible impact damage assessment in laminated composites using acoustic emission. Compos. Part B Eng. 2018, 152, 180–192. [Google Scholar] [CrossRef]
- Long, S.; Yao, X.; Zhang, X. Delamination prediction in composite laminates under low-velocity impact. Compos. Struct. 2015, 132, 290–298. [Google Scholar] [CrossRef]
- Zhu, X.; Fu, X.; Liu, L.; Xu, K.; Luo, G.; Zhao, Z.; Chen, W. Damage mechanism of composite laminates under multiple ice impacts at high velocity. Int. J. Impact Eng. 2022, 168, 104296. [Google Scholar] [CrossRef]
- Usamentiaga, R.; Venegas, P.; Guerediaga, J.; Vega, L.; López, I. Automatic detection of impact damage in carbon fiber composites using active thermography. Infrared Phys. Technol. 2013, 58, 36–46. [Google Scholar] [CrossRef]
- Tuo, H.; Wu, T.; Lu, Z.; Ma, X. Evaluation of damage evolution of impacted composite laminates under fatigue loadings by infrared thermography and ultrasonic methods. Polym. Test. 2021, 93, 106869. [Google Scholar] [CrossRef]
- Garcea, S.; Wang, Y.; Withers, P. X-ray computed tomography of polymer composites. Compos. Sci. Technol. 2018, 156, 305–319. [Google Scholar] [CrossRef]
- Katunin, A.; Wronkowicz-Katunin, A.; Dragan, K. Impact Damage Evaluation in Composite Structures Based on Fusion of Results of Ultrasonic Testing and X-ray Computed Tomography. Sensors 2020, 20, 1867. [Google Scholar] [CrossRef] [PubMed]
- Saeedifar, M.; Zarouchas, D. Damage characterization of laminated composites using acoustic emission: A review. Compos. Part B Eng. 2020, 195, 108039. [Google Scholar] [CrossRef]
- Liu, P.; Chu, J.; Liu, Y.; Zheng, J. A study on the failure mechanisms of carbon fiber/epoxy composite laminates using acoustic emission. Mater. Des. 2012, 37, 228–235. [Google Scholar] [CrossRef]
- Baxter, M.G.; Pullin, R.; Holford, K.M.; Evans, S.L. Delta T source location for acoustic emission. Mech. Syst. Signal Process. 2007, 21, 1512–1520. [Google Scholar] [CrossRef]
- Eaton, M.; Pullin, R.; Holford, K. Acoustic emission source location in composite materials using Delta T Mapping. Compos. Part A Appl. Sci. Manuf. 2012, 43, 856–863. [Google Scholar] [CrossRef]
- Pearson, M.R.; Eaton, M.; Featherston, C.; Pullin, R.; Holford, K. Improved acoustic emission source location during fatigue and impact events in metallic and composite structures. Struct. Health Monit. 2017, 16, 382–399. [Google Scholar] [CrossRef]
- Aljets, D.; Chong, A.; Wilcox, S.; Holford, K. Acoustic emission source location on large plate-like structures using a local triangular sensor array. Mech. Syst. Signal Process. 2012, 30, 91–102. [Google Scholar] [CrossRef]
- Mostafapour, A.; Davoodi, S.; Ghareaghaji, M. Acoustic emission source location in plates using wavelet analysis and cross time frequency spectrum. Ultrasonics 2014, 54, 2055–2062. [Google Scholar] [CrossRef]
- Jeong, H. Analysis of plate wave propagation in anisotropic laminates using a wavelet transform. NDT E Int. 2001, 34, 185–190. [Google Scholar] [CrossRef]
- Sikdar, S.; Liu, D.; Kundu, A. Acoustic emission data based deep learning approach for classification and detection of damage-sources in a composite panel. Compos. Part B Eng. 2022, 228, 109450. [Google Scholar] [CrossRef]
- Almeida, R.S.; Magalhães, M.D.; Karim, N.; Tushtev, K.; Rezwan, K. Identifying damage mechanisms of composites by acoustic emission and supervised machine learning. Mater. Des. 2023, 227, 111745. [Google Scholar] [CrossRef]
- Oskouei, A.R.; Heidary, H.; Ahmadi, M.; Farajpur, M. Unsupervised acoustic emission data clustering for the analysis of damage mechanisms in glass/polyester composites. Mater. Des. 2012, 37, 416–422. [Google Scholar] [CrossRef]
- Maillet, E.; Baker, C.; Morscher, G.N.; Pujar, V.V.; Lemanski, J.R. Feasibility and limitations of damage identification in composite materials using acoustic emission. Compos. Part A Appl. Sci. Manuf. 2015, 75, 77–83. [Google Scholar] [CrossRef]
- Bak, K.M.; KalaiChelvan, K.; Vijayaraghavan, G.; Sridhar, B. Acoustic emission wavelet transform on adhesively bonded single-lap joints of composite laminate during tensile test. J. Reinf. Plast. Compos. 2013, 32, 87–95. [Google Scholar] [CrossRef]
- Karimi, N.Z.; Minak, G.; Kianfar, P. Analysis of damage mechanisms in drilling of composite materials by acoustic emission. Compos. Struct. 2015, 131, 107–114. [Google Scholar] [CrossRef]
- Gutkin, R.; Green, C.; Vangrattanachai, S.; Pinho, S.; Robinson, P.; Curtis, P. On acoustic emission for failure investigation in CFRP: Pattern recognition and peak frequency analyses. Mech. Syst. Signal Process. 2011, 25, 1393–1407. [Google Scholar] [CrossRef]
- Satour, A.; Montrésor, S.; Bentahar, M.; Boubenider, F. Wavelet Based Clustering of Acoustic Emission Hits to Characterize Damage Mechanisms in Composites. J. Nondestruct. Eval. 2020, 39, 37. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source Event Number | The Proposed Method | The DTM Method |
|---|---|---|
| 1 | 4.32 | 11.66 |
| 2 | 5.74 | 20.9 |
| 3 | 3.68 | 28.86 |
| 4 | 5.28 | 12.12 |
| 5 | 4.12 | 2.58 |
| Average error | 4.62, 2.31% | 7.61, 3.81% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, J.; Wang, H.; Cheng, L.; Bi, Y.; Yang, D. Damage Localization, Identification and Evolution Studies during Quasi-Static Indentation of CFRP Composite Using Acoustic Emission. Polymers 2023, 15, 4633. https://doi.org/10.3390/polym15244633
Du J, Wang H, Cheng L, Bi Y, Yang D. Damage Localization, Identification and Evolution Studies during Quasi-Static Indentation of CFRP Composite Using Acoustic Emission. Polymers. 2023; 15(24):4633. https://doi.org/10.3390/polym15244633
Chicago/Turabian StyleDu, Jinbo, Han Wang, Liang Cheng, Yunbo Bi, and Di Yang. 2023. "Damage Localization, Identification and Evolution Studies during Quasi-Static Indentation of CFRP Composite Using Acoustic Emission" Polymers 15, no. 24: 4633. https://doi.org/10.3390/polym15244633
APA StyleDu, J., Wang, H., Cheng, L., Bi, Y., & Yang, D. (2023). Damage Localization, Identification and Evolution Studies during Quasi-Static Indentation of CFRP Composite Using Acoustic Emission. Polymers, 15(24), 4633. https://doi.org/10.3390/polym15244633