
The Shape Memory Properties and Actuation Performances of 4D Printing Poly (Ether-Ether-Ketone)



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Method
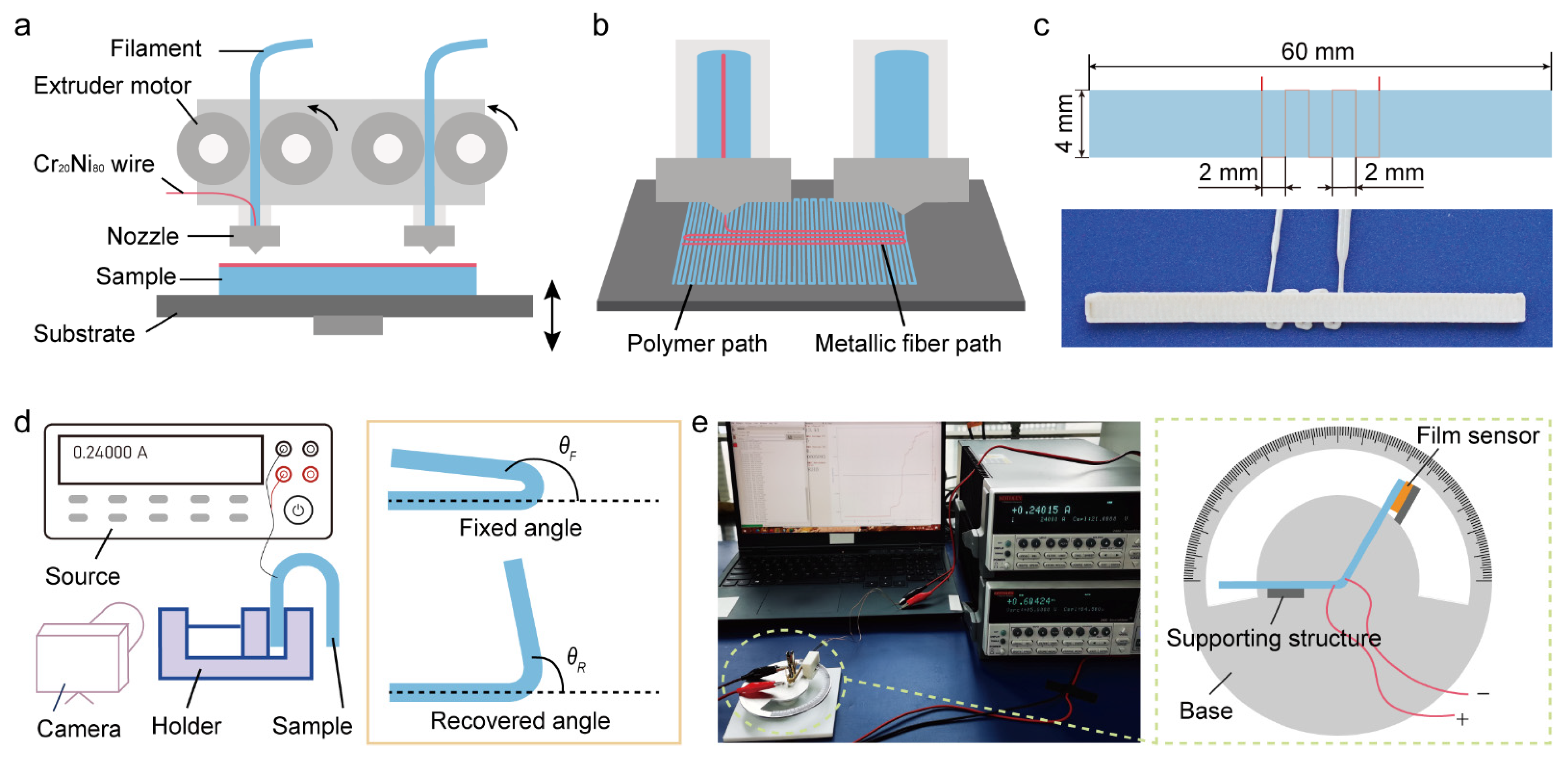
2.1. Materials and 4D Printing Method
2.2. Design and Experiments
3. Result and Discussion
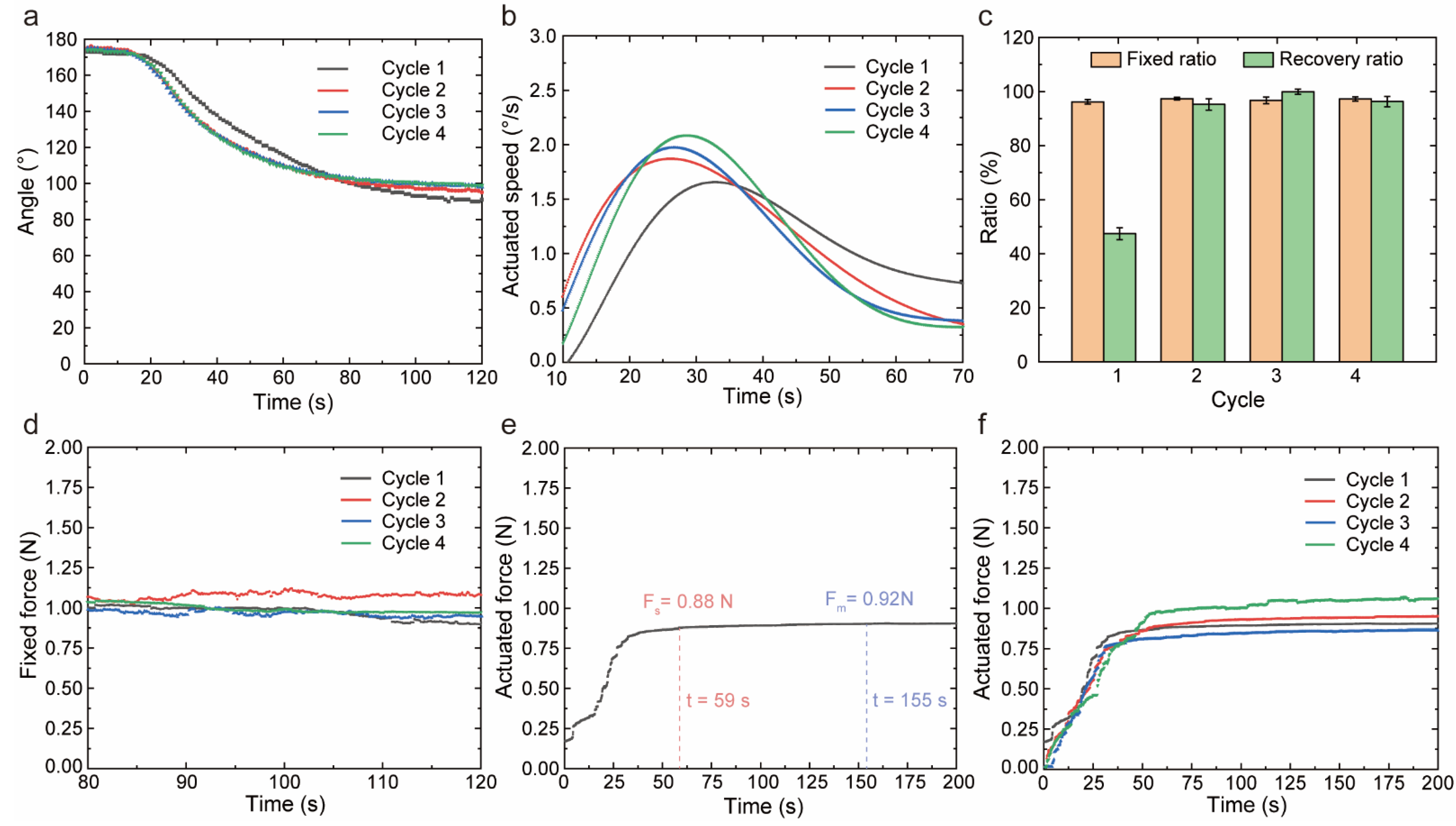
3.1. The Cycle Shape Memory Properties and Actuation Performances of PEEK
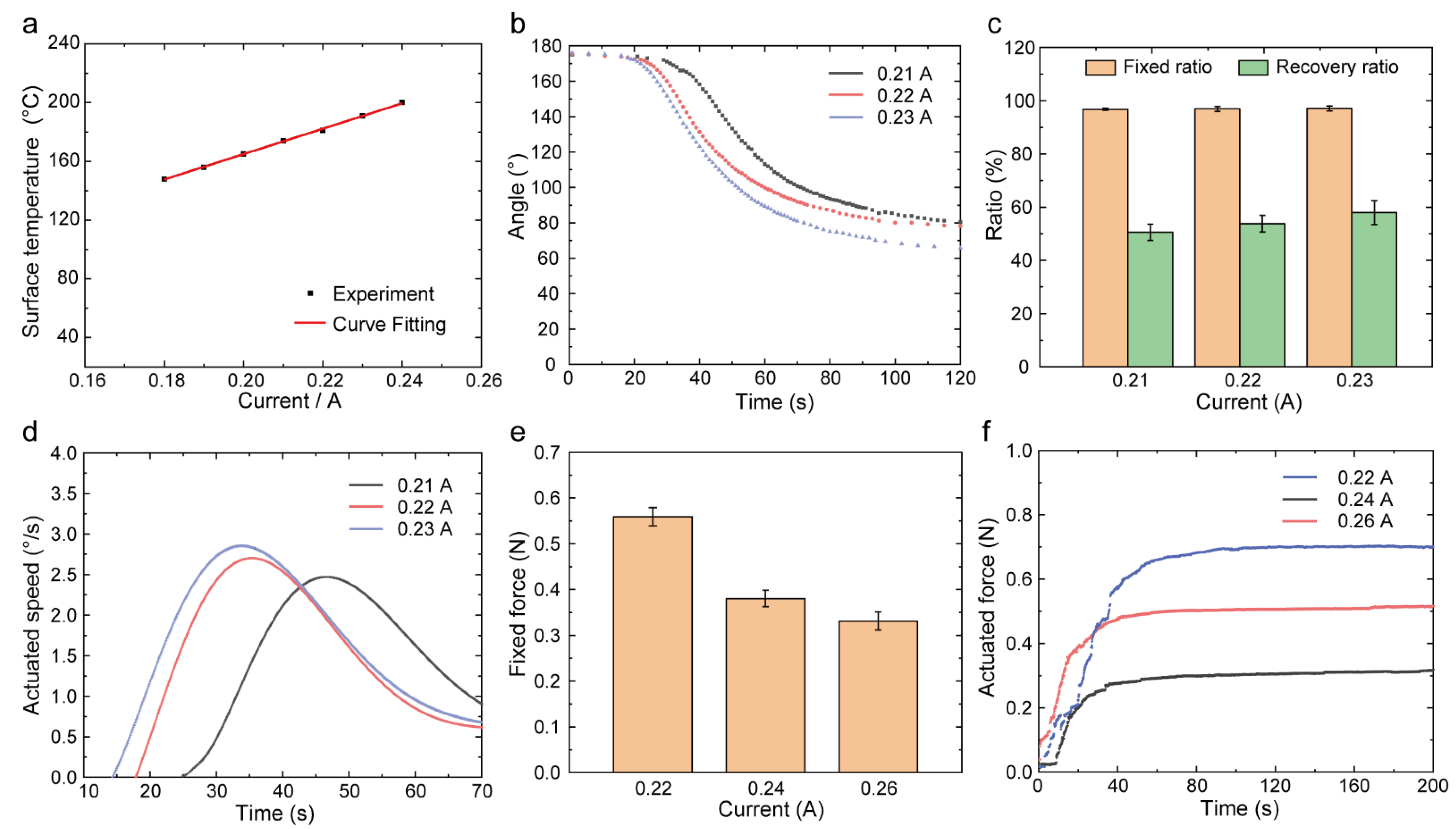
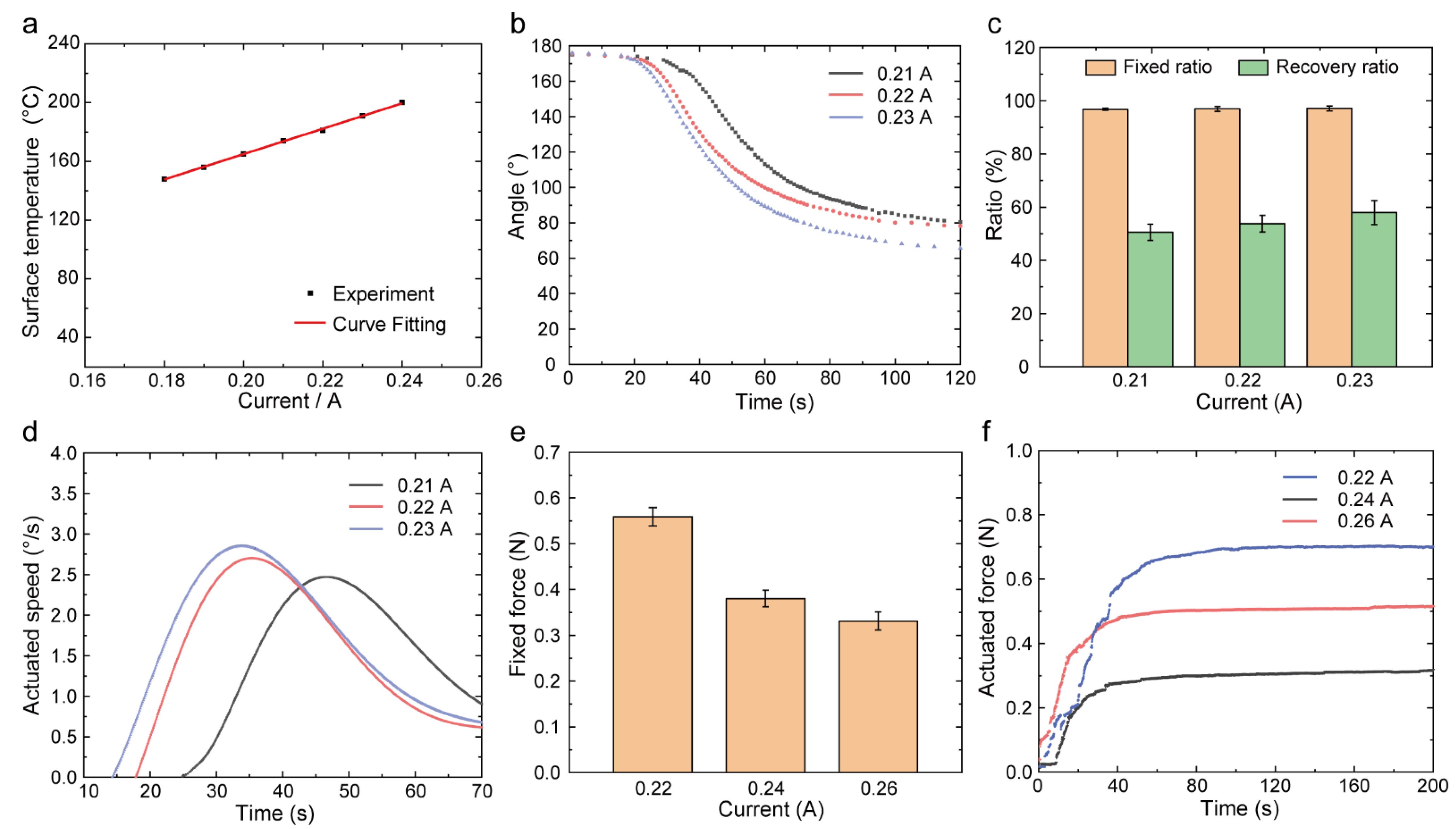
3.2. The Effect of Temperature on Shape Memory Properties and Actuation Performances
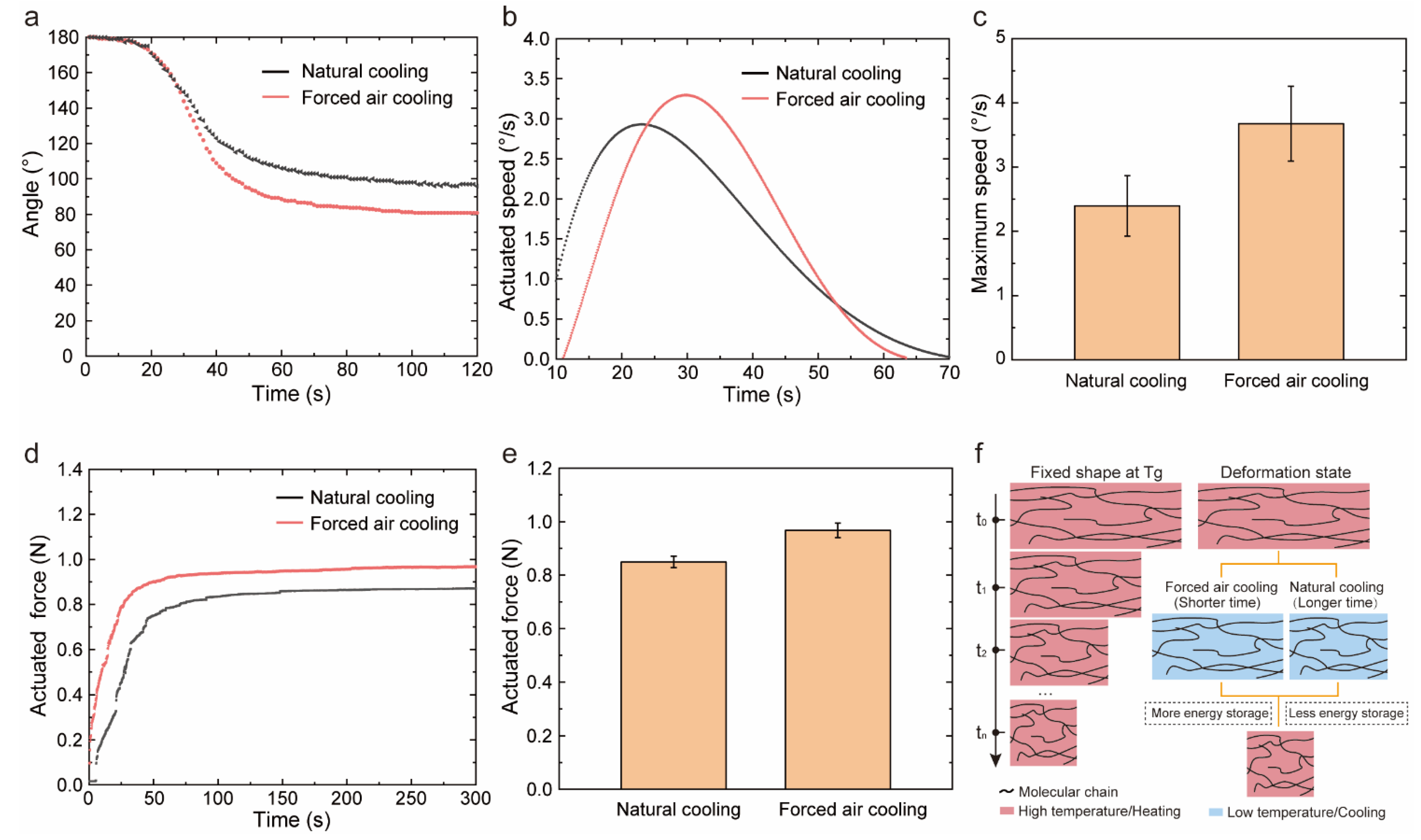
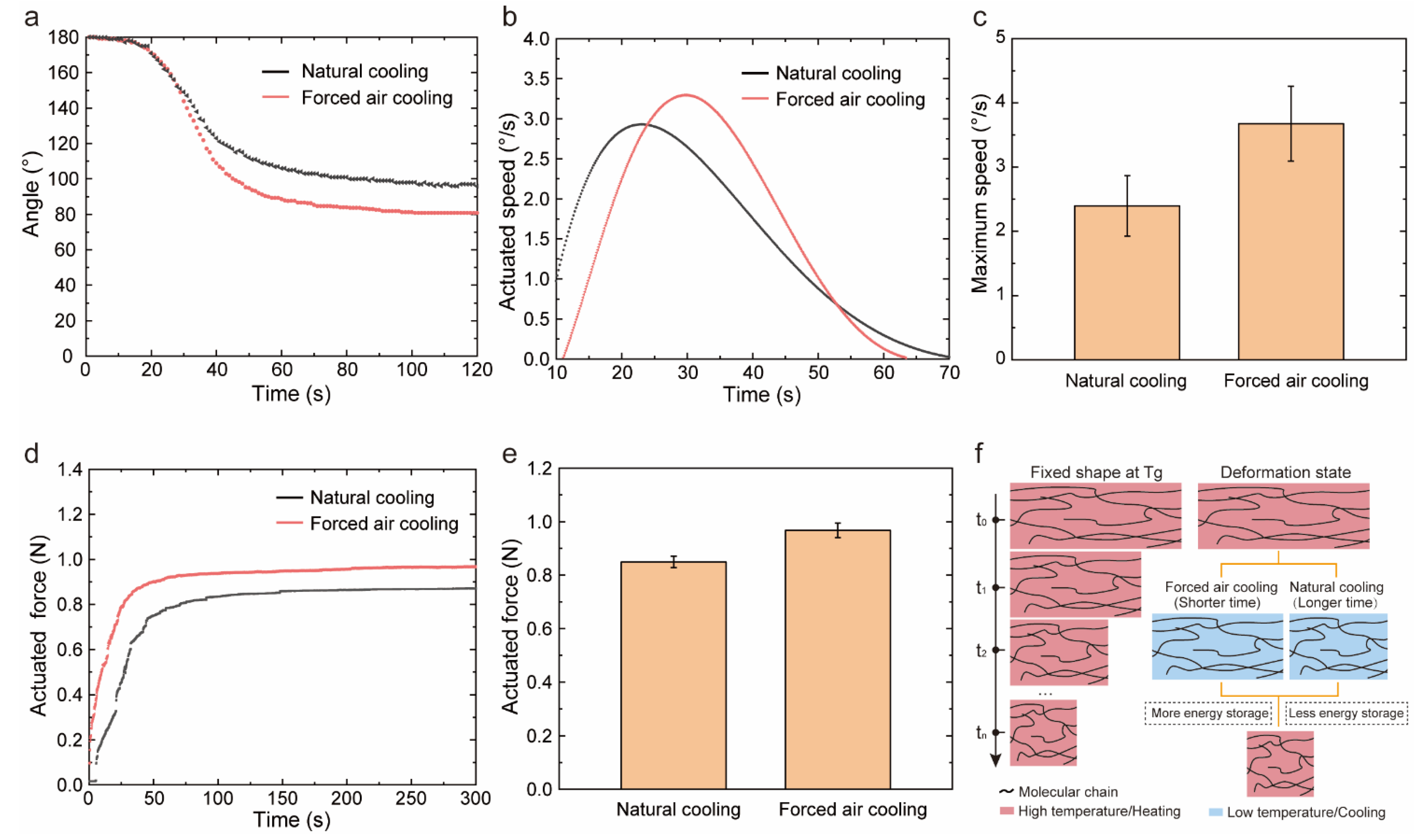
3.3. The Effect of Cooling Speed on Shape Memory Properties and Actuation Performances
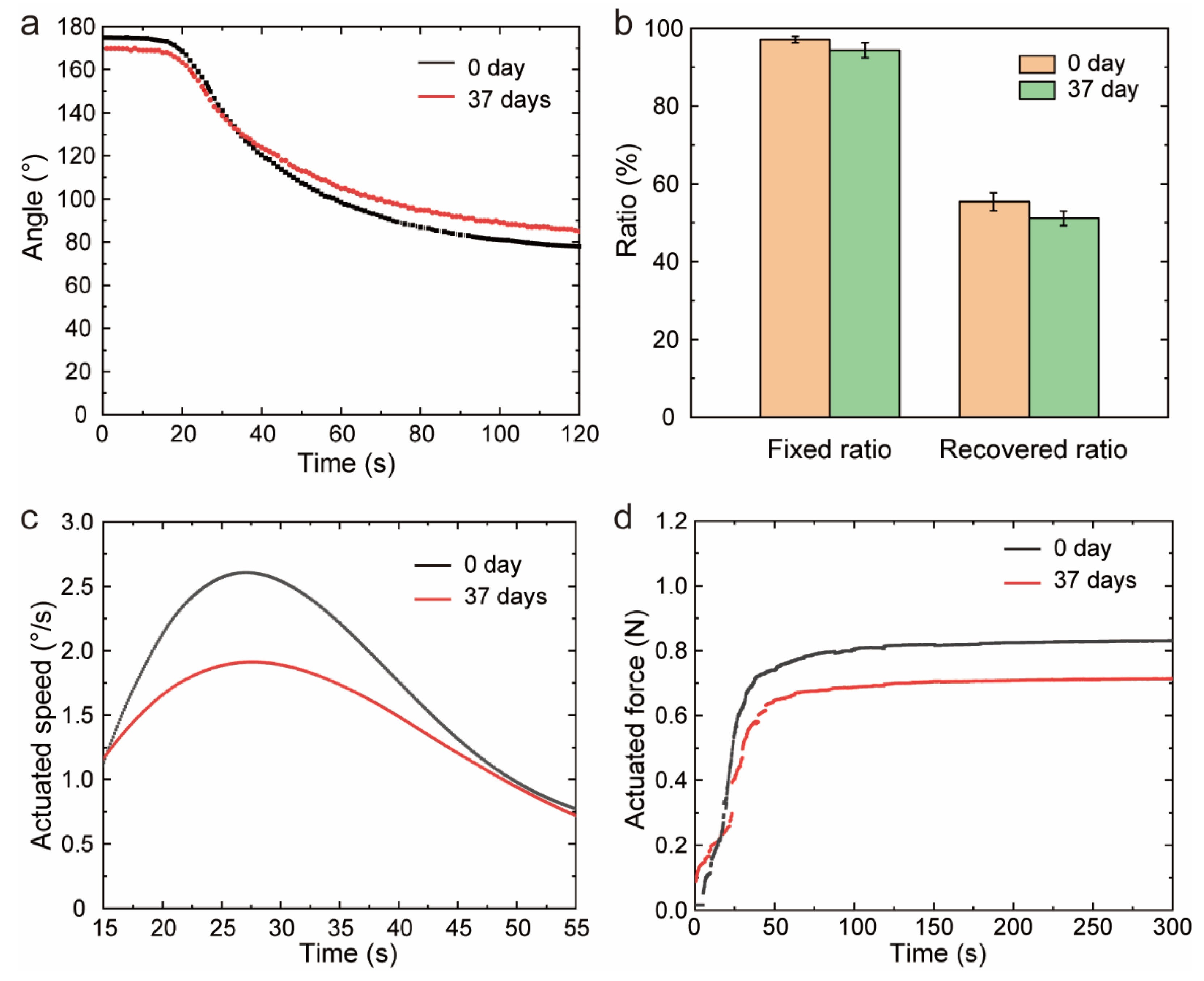
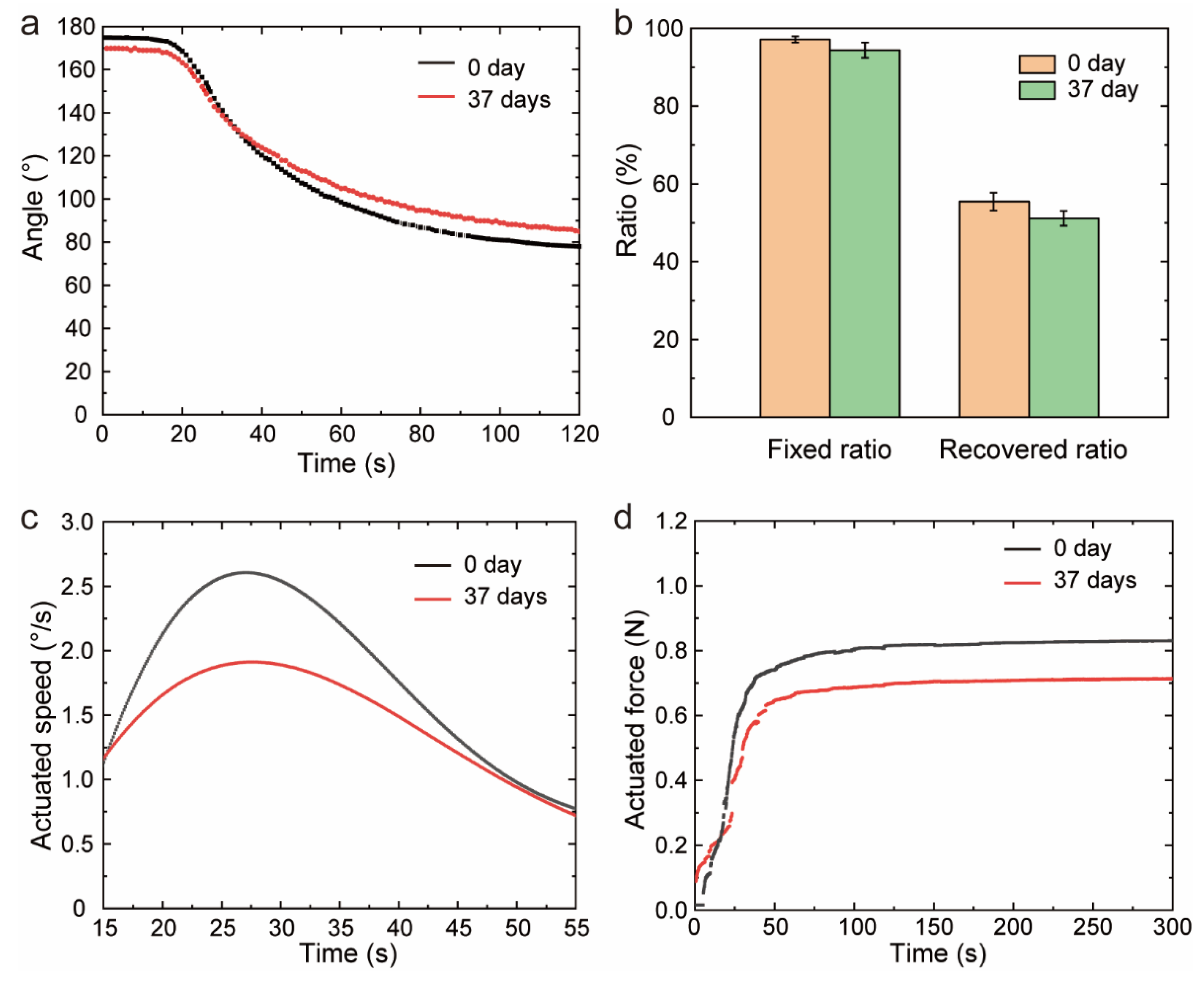
3.4. The Effect of Idling Time on Shape Memory Properties and Actuation Performances
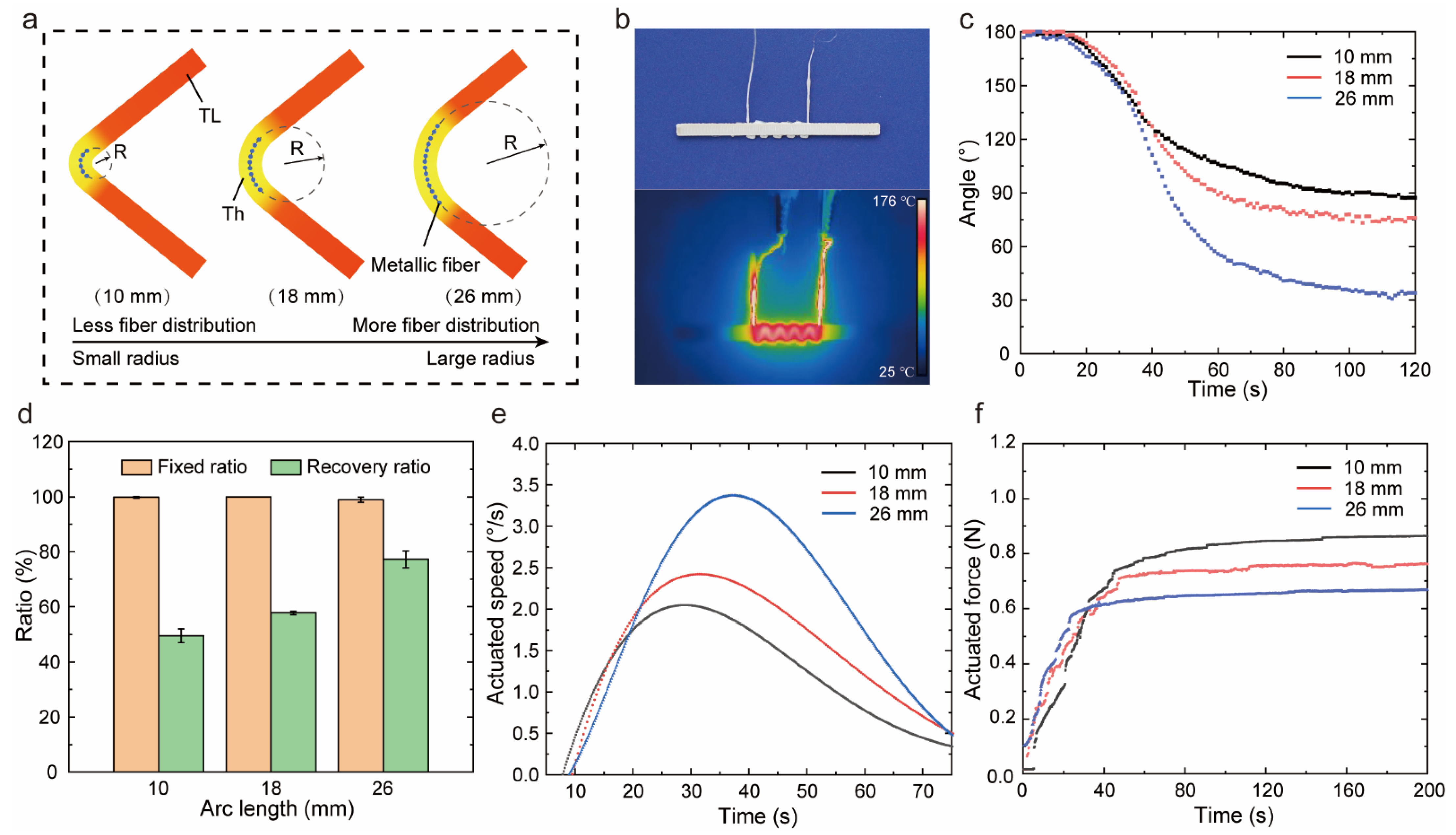
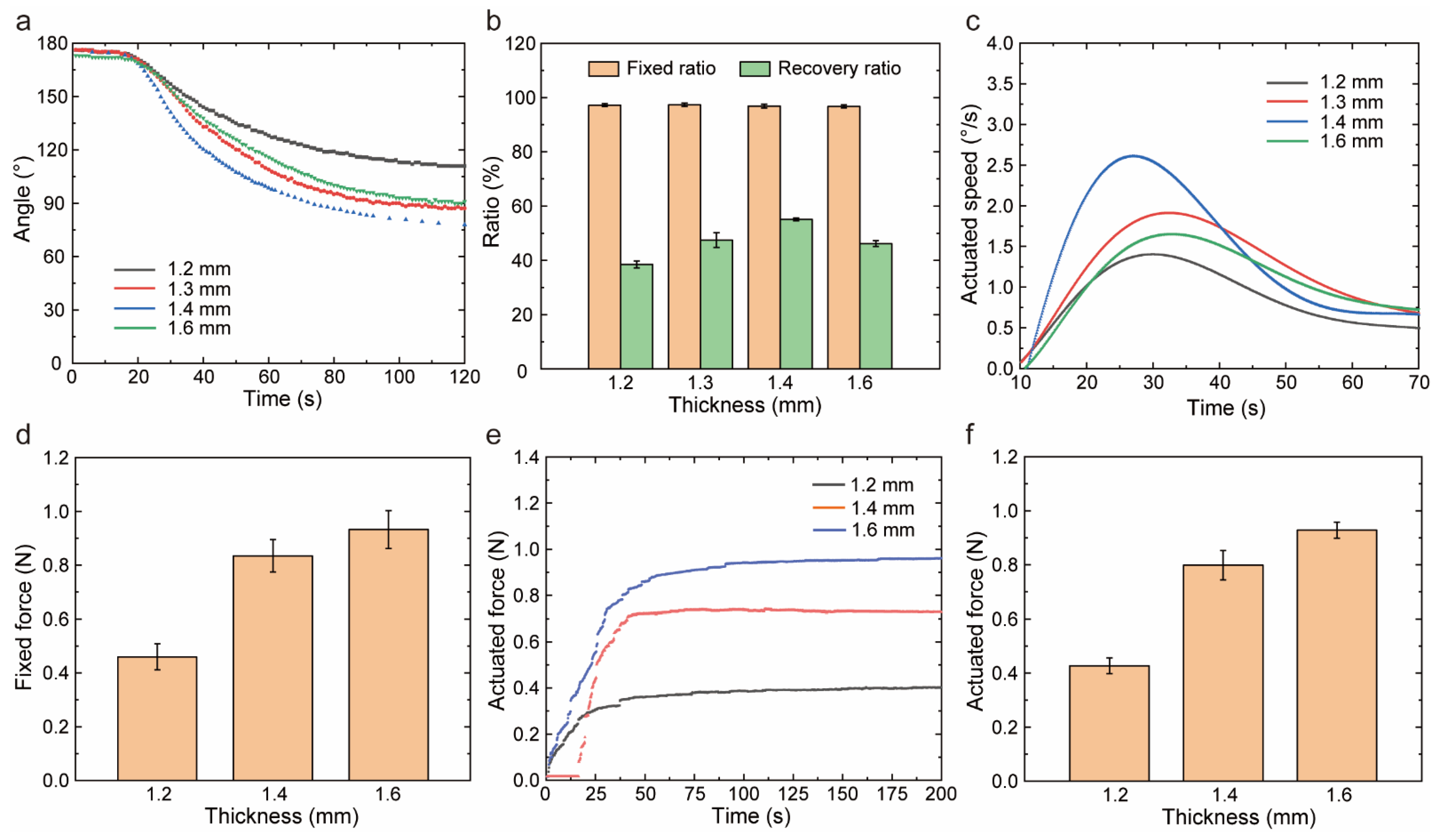
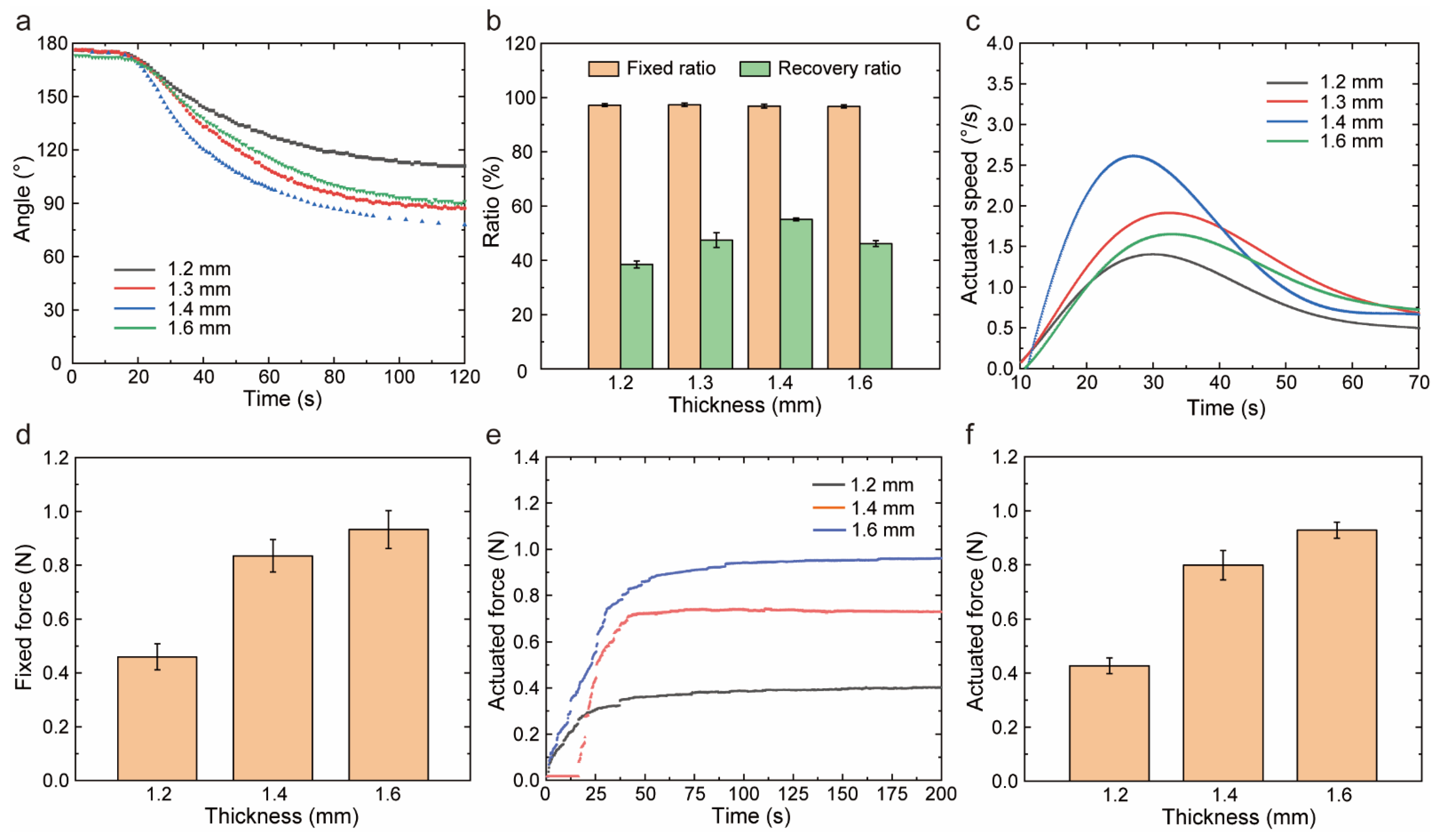
3.5. The Effect of Structure Parameters on Shape Memory Properties and Actuation Performances
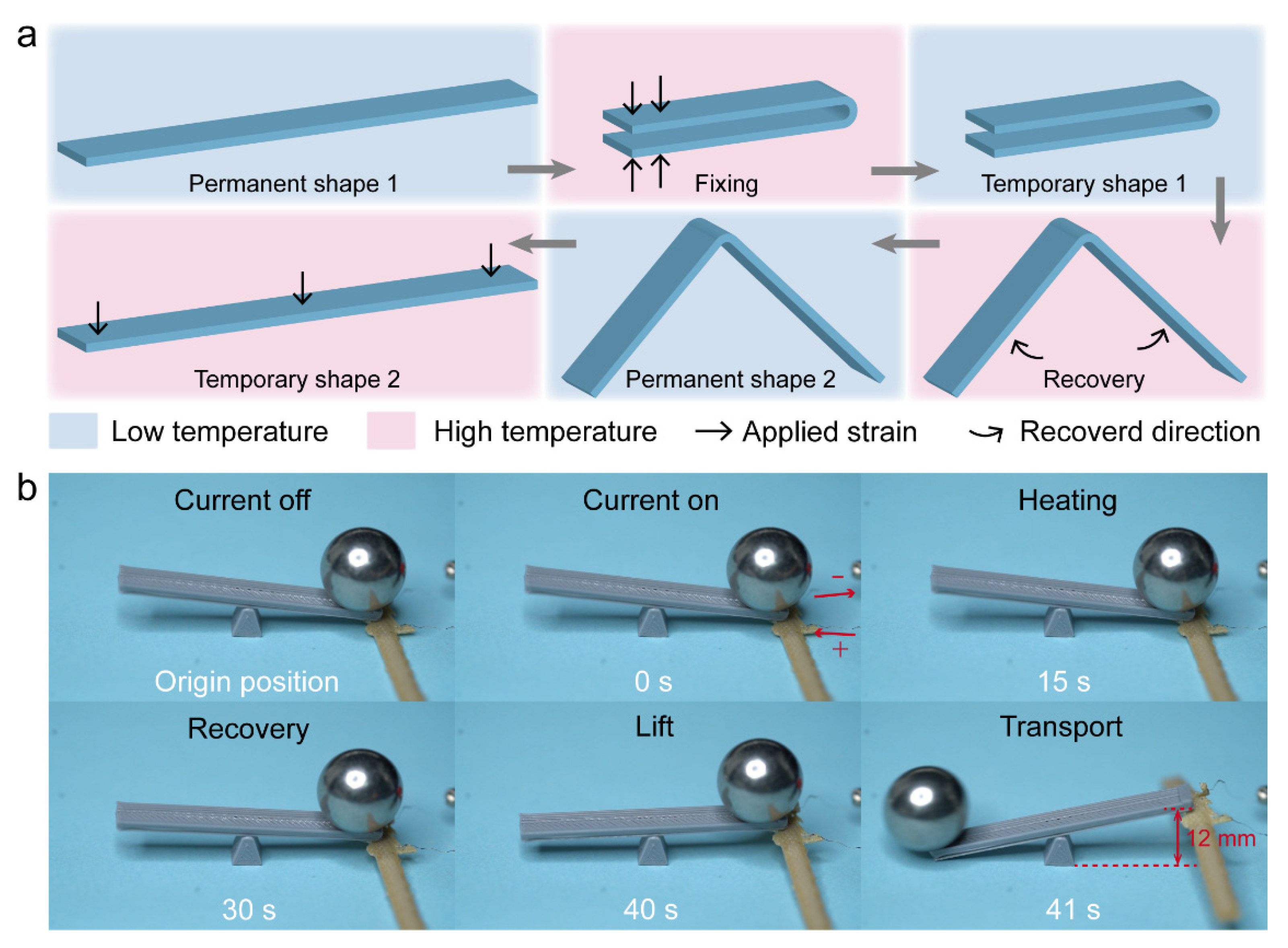
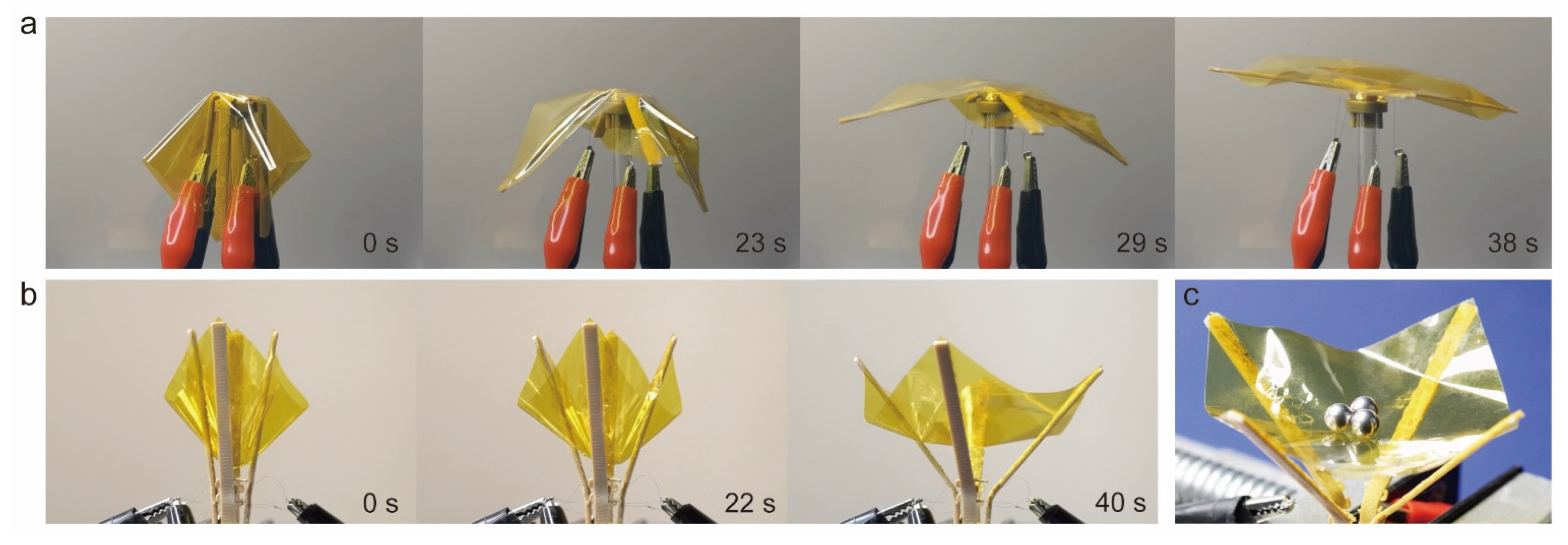
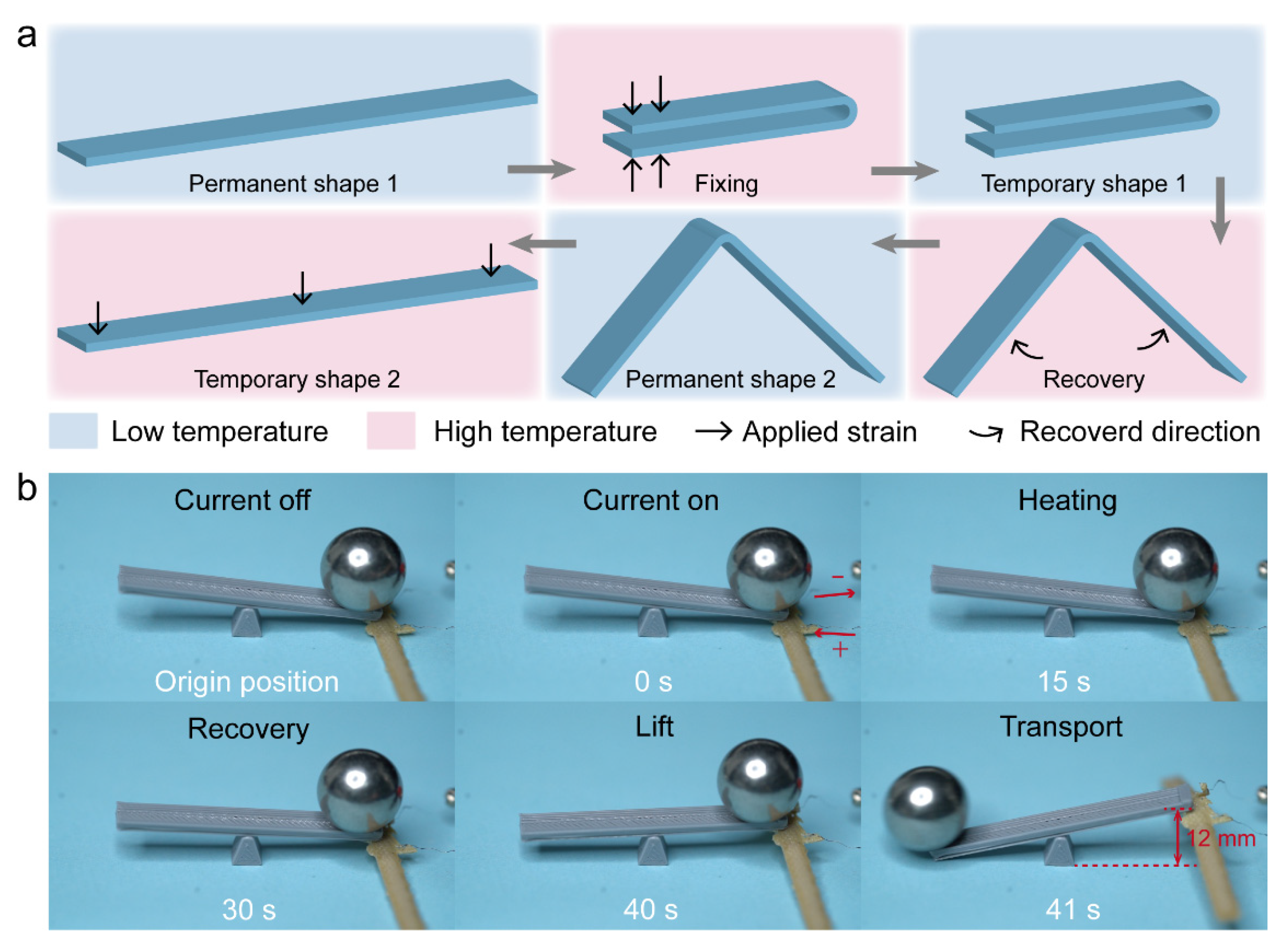
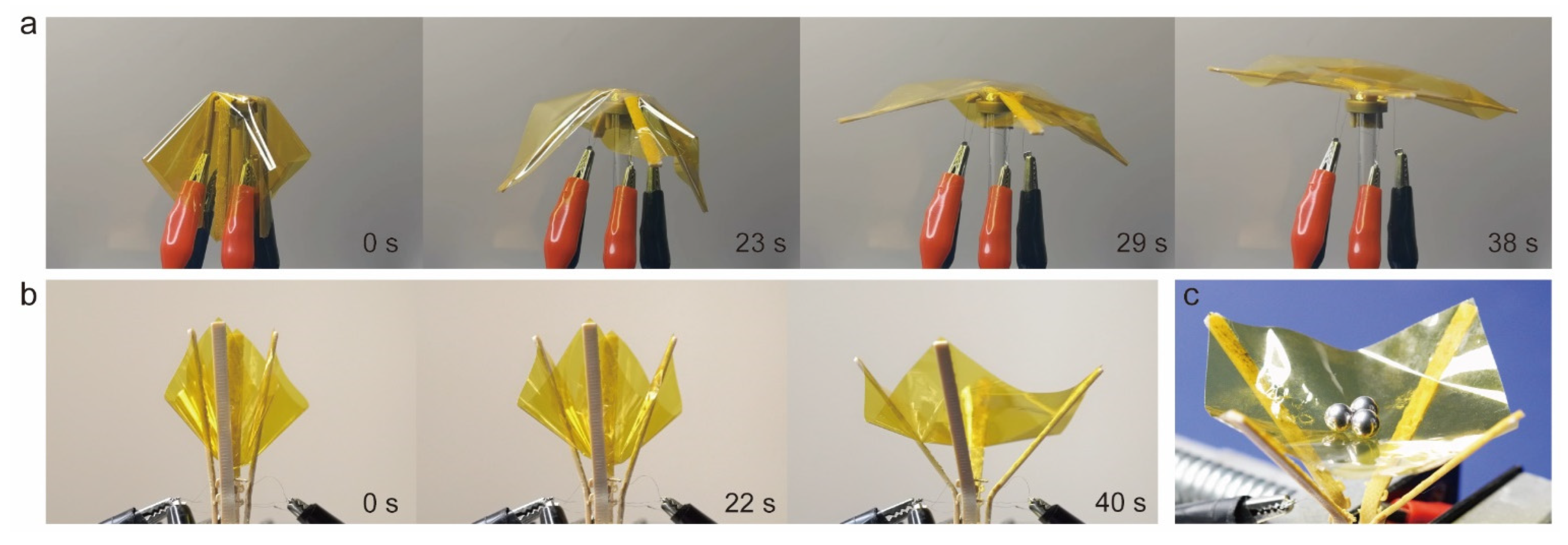
3.6. Weight Transport and Deployable Structure of Shape Memory PEEK
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xia, Y.; He, Y.; Zhang, F.; Liu, Y.; Leng, J. A Review of Shape Memory Polymers and Composites: Mechanisms, Materials, and Applications. Adv. Mater. 2021, 33, e2000713. [Google Scholar] [CrossRef] [PubMed]
- Behl, M.; Lendlein, A. Shape-Memory Polymers. Kirk-Othmer Encycl. Chem. Technol. 2011, 1–16. [Google Scholar]
- Behl, M.; Razzaq, M.Y.; Lendlein, A. Multifunctional shape-memory polymers. Adv. Mater. 2010, 22, 3388–3410. [Google Scholar] [CrossRef] [PubMed]
- Lendlein, A.; Kelch, S. Shape-Memory Effect. Angew. Chem. Int. Ed. 2002, 41, 2034–2057. [Google Scholar] [CrossRef]
- Wu, J.; Yuan, C.; Ding, Z.; Isakov, M.; Mao, Y.; Wang, T.; Dunn, M.L.; Qi, H.J. Multi-shape active composites by 3D printing of digital shape memory polymers. Sci. Rep. 2016, 6, 24224. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Guan, Q.; Liu, Y.; Leng, J. Morphing aircraft based on smart materials and structures: A state-of-the-art review. J. Intell. Mater. Syst. Struct. 2016, 27, 2289–2312. [Google Scholar] [CrossRef]
- Huang, T.Y.; Huang, H.W.; Jin, D.D.; Chen, Q.Y.; Huang, J.Y.; Zhang, L.; Duan, H.L. Four-dimensional micro-building blocks. Sci. Adv. 2020, 6, eaav8219. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Y. The mechanical design of a hybrid intelligent hinge with shape memory polymer and spring sheet. Compos. Part B Eng. 2018, 134, 1–8. [Google Scholar] [CrossRef]
- Sun, L.; Gao, X.; Wu, D.; Guo, Q. Advances in Physiologically Relevant Actuation of Shape Memory Polymers for Biomedical Applications. Polym. Rev. 2020, 61, 280–318. [Google Scholar] [CrossRef]
- Korde, J.M.; Kandasubramanian, B. Naturally biomimicked smart shape memory hydrogels for biomedical functions. Chem. Eng. J. 2020, 379, 122430. [Google Scholar] [CrossRef]
- Delaey, J.; Dubruel, P.; Van Vlierberghe, S. Shape-Memory Polymers for Biomedical Applications. Adv. Funct. Mater. 2020, 30, 1909047. [Google Scholar] [CrossRef]
- Kirillova, A.; Ionov, L. Shape-changing polymers for biomedical applications. J. Mater. Chem. B 2019, 7, 1597–1624. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.; Lv, J.; Li, Y.; Zhang, F.; Li, J.; Liu, Y.; Liu, L.; Leng, J. 4D-Printed Biodegradable and Remotely Controllable Shape Memory Occlusion Devices. Adv. Funct. Mater. 2019, 29, 1906569. [Google Scholar] [CrossRef]
- Ze, Q.; Kuang, X.; Wu, S.; Wong, J.; Montgomery, S.M.; Zhang, R.; Kovitz, J.M.; Yang, F.; Qi, H.J.; Zhao, R. Magnetic Shape Memory Polymers with Integrated Multifunctional Shape Manipulation. Adv. Mater. 2020, 32, e1906657. [Google Scholar] [CrossRef] [PubMed]
- Zarek, M.; Layani, M.; Cooperstein, I.; Sachyani, E.; Cohn, D.; Magdassi, S. 3D Printing of Shape Memory Polymers for Flexible Electronic Devices. Adv. Mater. 2016, 28, 4449–4454. [Google Scholar] [CrossRef]
- Wu, X.L.; Huang, W.M.; Ding, Z.; Tan, H.X.; Yang, W.G.; Sun, K.Y. Characterization of the thermoresponsive shape-memory effect in poly(ether ether ketone) (PEEK). J. Appl. Polym. Sci. 2014, 131, 39844. [Google Scholar] [CrossRef]
- Rinaldi, M.; Ferrara, M.; Pigliaru, L.; Allegranza, C.; Nanni, F. Additive manufacturing of polyether ether ketone-based composites for space application: A mini-review. CEAS Space J. 2021, 1–11. [Google Scholar] [CrossRef]
- Wu, Y.; Cao, Y.; Wu, Y.; Li, D. Neutron Shielding Performance of 3D-Printed Boron Carbide PEEK Composites. Materials 2020, 13, 2314. [Google Scholar] [CrossRef]
- Jahan, M.S.; Walters, B.M.; Riahinasab, T.; Gnawali, R.; Adhikari, D.; Trieu, H. A comparative study of radiation effects in medical-grade polymers: UHMWPE, PCU and PEEK. Radiat. Phys. Chem. 2016, 118, 96–101. [Google Scholar] [CrossRef]
- Hassan EA, M.; Ge, D.; Zhu, S.; Yang, L.; Zhou, J.; Yu, M. Enhancing CF/PEEK composites by CF decoration with polyimide and loosely-packed CNT arrays. Composites Part A 2019, 127, 105613. [Google Scholar] [CrossRef]
- Han, X.; Yang, D.; Yang, C.; Spintzyk, S.; Scheideler, L.; Li, P.; Li, D.; Geis-Gerstorfer, J.; Rupp, F. Carbon Fiber Reinforced PEEK Composites Based on 3D-Printing Technology for Orthopedic and Dental Applications. J. Clin. Med. 2019, 8, 240. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Wang, K.; Dong, A.; Li, X.; Fan, X.; Zhao, Y. A comprehensive study on controlling the porosity of CCF300/PEEK composites by optimizing the impregnation parameters. Polym. Compos. 2018, 39, 3765–3779. [Google Scholar] [CrossRef]
- Ye, J.; He, W.; Shi, Y.; Wang, Y.; Cai, G.; Zhai, Z.; Chen, X. Evaluate the Fatigue Life of CFRC Subjected to Coupled Thermo-Mechanical Loading. Materials 2019, 12, 2886. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Weiss, R.A. Sulfonated Poly (ether ether ketone) Ionomers and Their High Temperature Shape Memory Behavior. Macromolecules 2014, 47, 1732–1740. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, K.; Zhou, C.; Ren, M.; Gu, Y.; Li, T. Engineering the mechanical properties of CNT/PEEK nanocomposites. RSC Adv. 2019, 9, 12836–12845. [Google Scholar] [CrossRef]
- Wang, X.; Huang, Z.; Lai, M.; Jiang, L.; Zhang, Y.; Zhou, H. Highly enhancing the interfacial strength of CF/PEEK composites by introducing PAIK onto diazonium functionalized carbon fibers. Appl. Surf. Sci. 2020, 510, 145400. [Google Scholar] [CrossRef]
- Shi, Y.; Yoonessi, M.; Weiss, R.A. High Temperature Shape Memory Polymers. Macromolecules 2013, 46, 4160–4167. [Google Scholar] [CrossRef]
- Yoon, J. Design-to-fabrication with thermo-responsive shape memory polymer applications for building skins. Archit. Sci. Rev. 2020, 64, 72–86. [Google Scholar] [CrossRef]
- An, Y.; Okuzaki, H. Novel electro-active shape memory polymers for soft actuators. Jpn. J. Appl. Phys. 2020, 59, 061002. [Google Scholar] [CrossRef]
- Wu, S.R.; Chen, T.H.; Tsai, H.Y. A Review of Actuation Force in Origami Applications. J. Mech. 2019, 35, 627–639. [Google Scholar] [CrossRef]
- Zhou, T.; Zhou, Y.; Hua, Z.; Yang, Y.; Zhou, C.; Ren, L.; Zhang, Z.; Zang, J. 4D printing high temperature shape-memory poly(ether–ether–ketone). Smart Mater. Struct. 2021, 30, 115006. [Google Scholar] [CrossRef]
- Li, M.; Guan, Q.; Dingemans, T.J. High-Temperature Shape Memory Behavior of Semicrystalline Polyamide Thermosets. ACS Appl. Mater. Interfaces 2018, 10, 19106–19115. [Google Scholar] [CrossRef]
- Feng, C.; Li, Y.; Wang, L.; Cao, Y.; Yao, M.; Meng, F.; Yang, F.; Li, B.; Wang, K.; Yu, G. Giant Strain Control of Antiferromagnetic Moment in Metallic FeMn by Tuning Exchange Spring Structure. Adv. Funct. Mater. 2020, 30, 1909708. [Google Scholar] [CrossRef]
- Guo, F.; Zheng, X.; Liang, C.; Jiang, Y.; Xu, Z.; Jiao, Z.; Liu, Y.; Wang, H.T.; Sun, H.; Ma, L.; et al. Millisecond Response of Shape Memory Polymer Nanocomposite Aerogel Powered by Stretchable Graphene Framework. ACS Nano 2019, 13, 5549–5558. [Google Scholar] [CrossRef]
- Cho, D.; Park, J.; Kim, J. Automatic Actuation of the Anti-Freezing System Using SMA Coil Springs. Metals 2021, 11, 1424. [Google Scholar] [CrossRef]
- Yang, X.; Chang, L.; Pérez-Arancibia, N.O. An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle. Sci. Robot. 2020, 5, eaba0015. [Google Scholar] [CrossRef] [PubMed]
- Oh, S.; Tabassian, R.; Thangasamy, P.; Mahato, M.; Nguyen, V.H.; Nam, S.; Huapeng, Z.; Oh, I. Cooling-Accelerated Nanowire-Nitinol Hybrid Muscle for Versatile Prosthetic Hand and Biomimetic Retractable Claw. Adv. Funct. Mater. 2022, 32, 2111145. [Google Scholar] [CrossRef]
- Leal, P.B.C.; Savi, M.A. Shape memory alloy-based mechanism for aeronautical application: Theory, optimization and experiment. Aerosp. Sci. Technol. 2018, 76, 155–163. [Google Scholar] [CrossRef]
- Van Humbeeck, J. Shape memory alloys with high transformation temperatures. Mater. Res. Bull. 2012, 47, 2966–2968. [Google Scholar] [CrossRef]
- Shivakumar, R.; Leong, F.N.; Tsang, S.H.; Teo, E.H.T. Effect of loading fraction of three-dimensional graphene foam (3D-C) on thermal, mechanical, and shape memory properties of 3D-C/SMP composite. Mater. Res. Bull. 2021, 142, 111378. [Google Scholar] [CrossRef]
- Barletta, M.; Gisario, A.; Mehrpouya, M. 4D printing of shape memory polylactic acid (PLA) components: Investigating the role of the operational parameters in fused deposition modelling (FDM). J. Manuf. Processes 2021, 61, 473–480. [Google Scholar] [CrossRef]
- Agarwal, T.; Hann, S.Y.; Chiesa, I.; Cui, H.; Celikkin, N.; Micalizzi, S.; Maiti, T.K. 4D printing in biomedical applications: Emerging trends and technologies. J. Mater. Chem. B 2021, 9, 7608–7632. [Google Scholar] [CrossRef] [PubMed]
- Kuang, X.; Roach, D.J.; Wu, J.; Hamel, C.M.; Ding, Z.; Wang, T.; Dunn, M.L.; Qi, H.J. Advances in 4D Printing: Materials and Applications. Adv. Funct. Mater. 2018, 29, 1805290. [Google Scholar] [CrossRef]
- Zhou, Y.; Yang, Y.; Jian, A.; Zhou, T.; Tao, G.; Ren, L.; Zang, J.; Zhang, Z. Co-extrusion 4D printing of shape memory polymers with continuous metallic fibers for selective deformation. Compos. Sci. Technol. 2022, 227, 109603. [Google Scholar] [CrossRef]
- Qi, H.J.; Nguyen, T.D.; Castro, F.; Yakacki, C.M.; Shandas, R. Finite deformation thermo-mechanical behavior of thermally induced shape memory polymers. J. Mech. Phys. Solids 2008, 56, 1730–1751. [Google Scholar] [CrossRef]
- PW-Sat2 (PWSat-2, PW-SAT2). Available online: https://www.nanosats.eu/sat/pw-sat2 (accessed on 2 September 2022).


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Ren, L.; Zang, J.; Zhang, Z. The Shape Memory Properties and Actuation Performances of 4D Printing Poly (Ether-Ether-Ketone). Polymers 2022, 14, 3800. https://doi.org/10.3390/polym14183800
Zhou Y, Ren L, Zang J, Zhang Z. The Shape Memory Properties and Actuation Performances of 4D Printing Poly (Ether-Ether-Ketone). Polymers. 2022; 14(18):3800. https://doi.org/10.3390/polym14183800
Chicago/Turabian StyleZhou, Yuting, Luquan Ren, Jianfeng Zang, and Zhihui Zhang. 2022. "The Shape Memory Properties and Actuation Performances of 4D Printing Poly (Ether-Ether-Ketone)" Polymers 14, no. 18: 3800. https://doi.org/10.3390/polym14183800
APA StyleZhou, Y., Ren, L., Zang, J., & Zhang, Z. (2022). The Shape Memory Properties and Actuation Performances of 4D Printing Poly (Ether-Ether-Ketone). Polymers, 14(18), 3800. https://doi.org/10.3390/polym14183800