
Start-Up of a Solid Oxide Fuel Cell System with a View to Materials Science-Related Aspects, Control and Thermo-Mechanical Stresses


Abstract
:1. Introduction
2. System Description
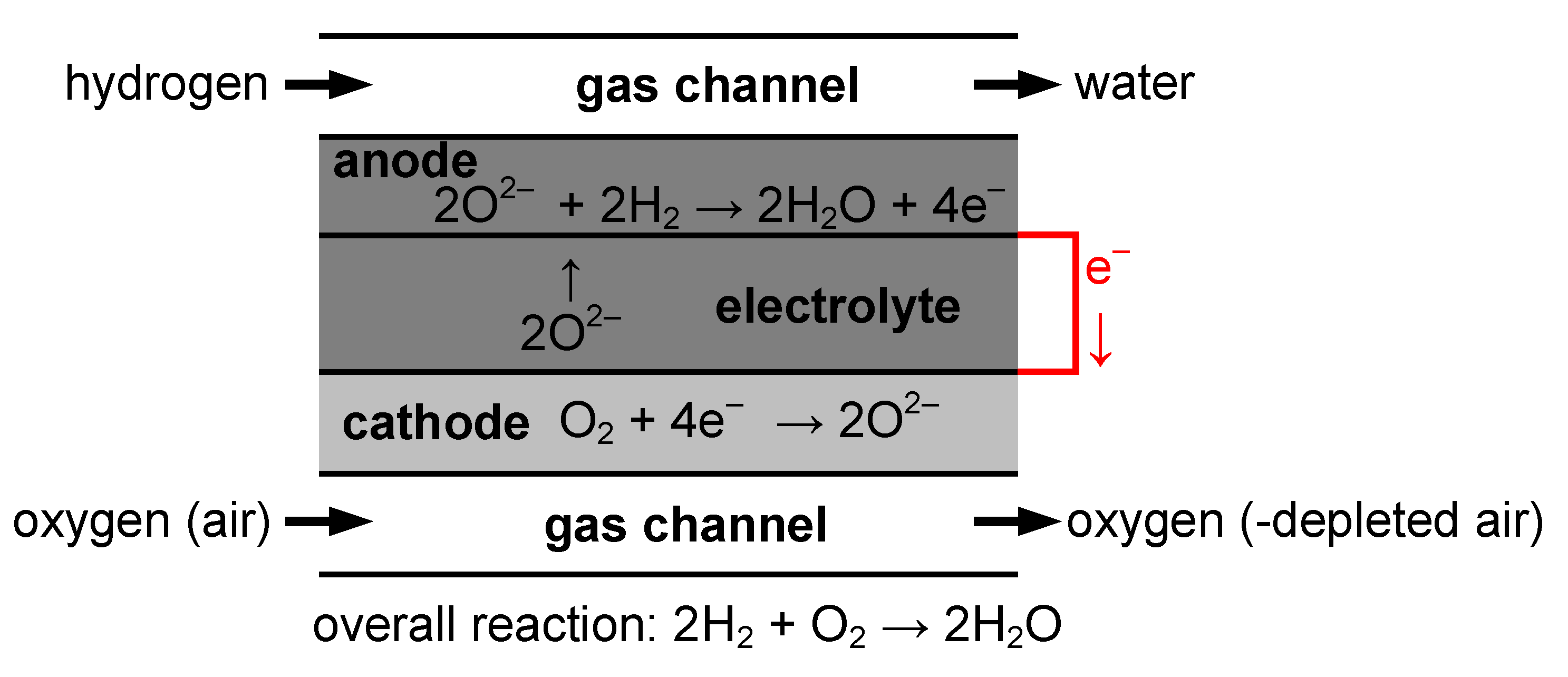
2.1. Solid Oxide Fuel Cell
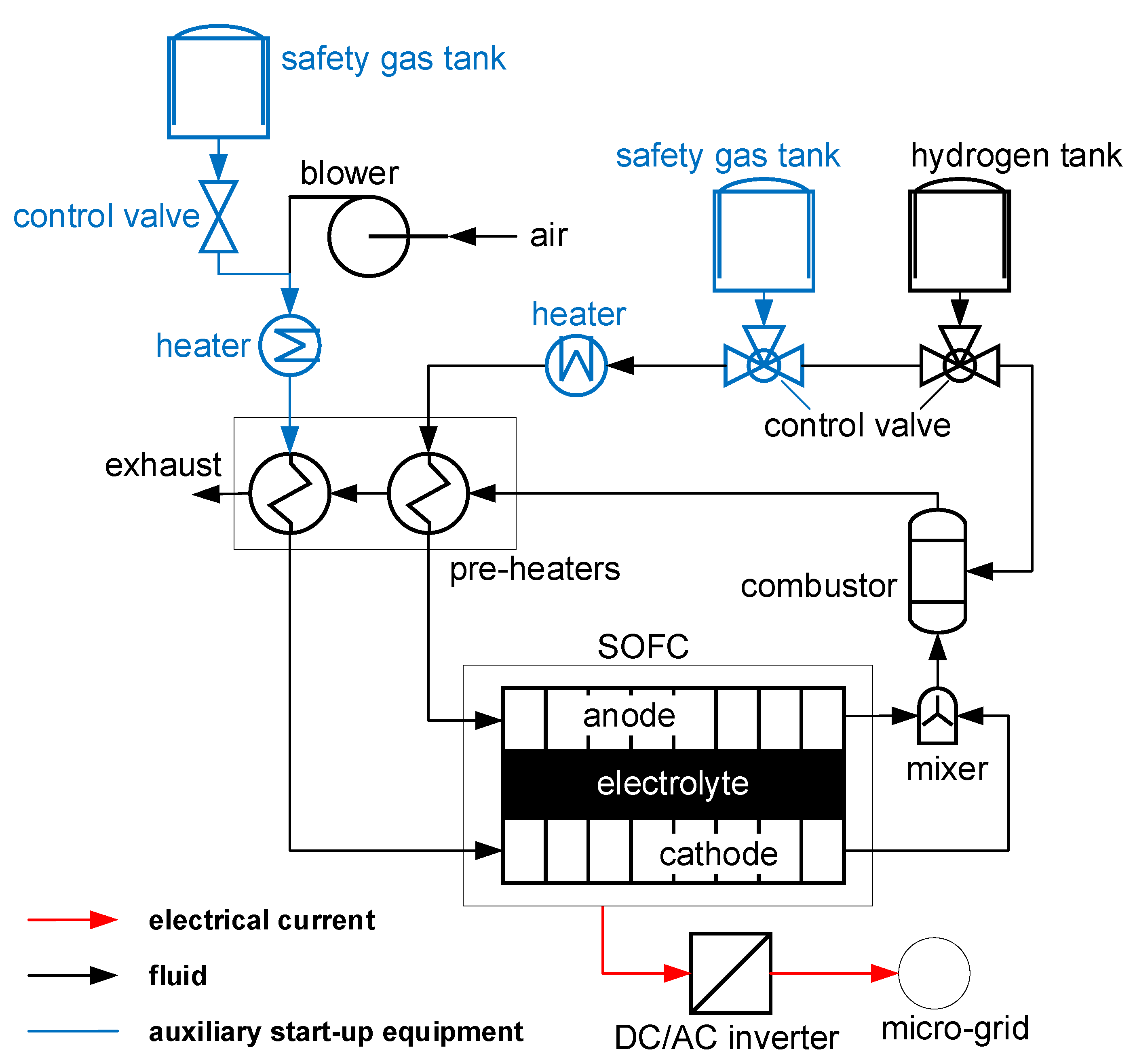
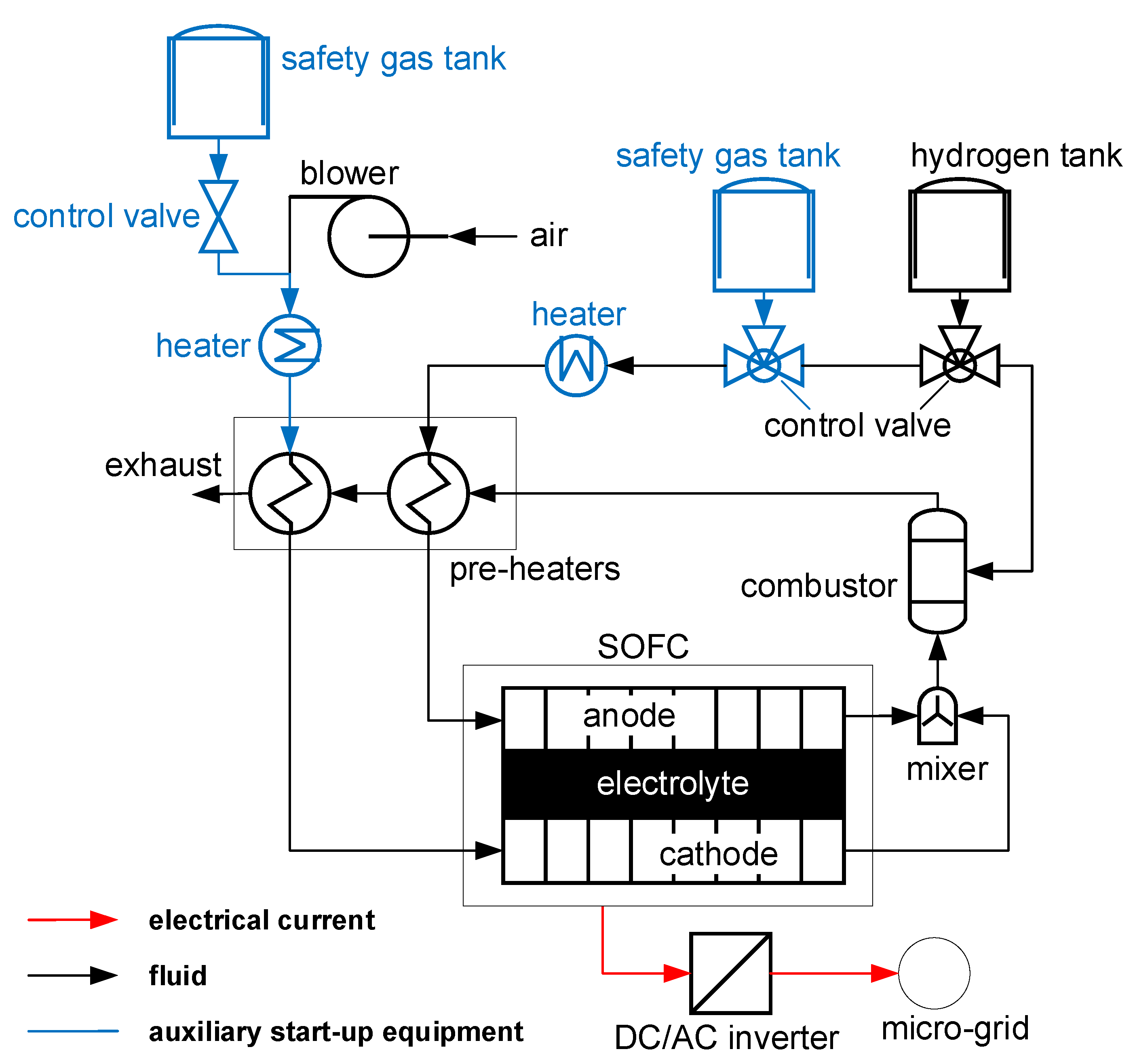
2.2. Principal System Operation and Design
2.3. Design and Operation System Constraints
2.4. Degrees of Freedom
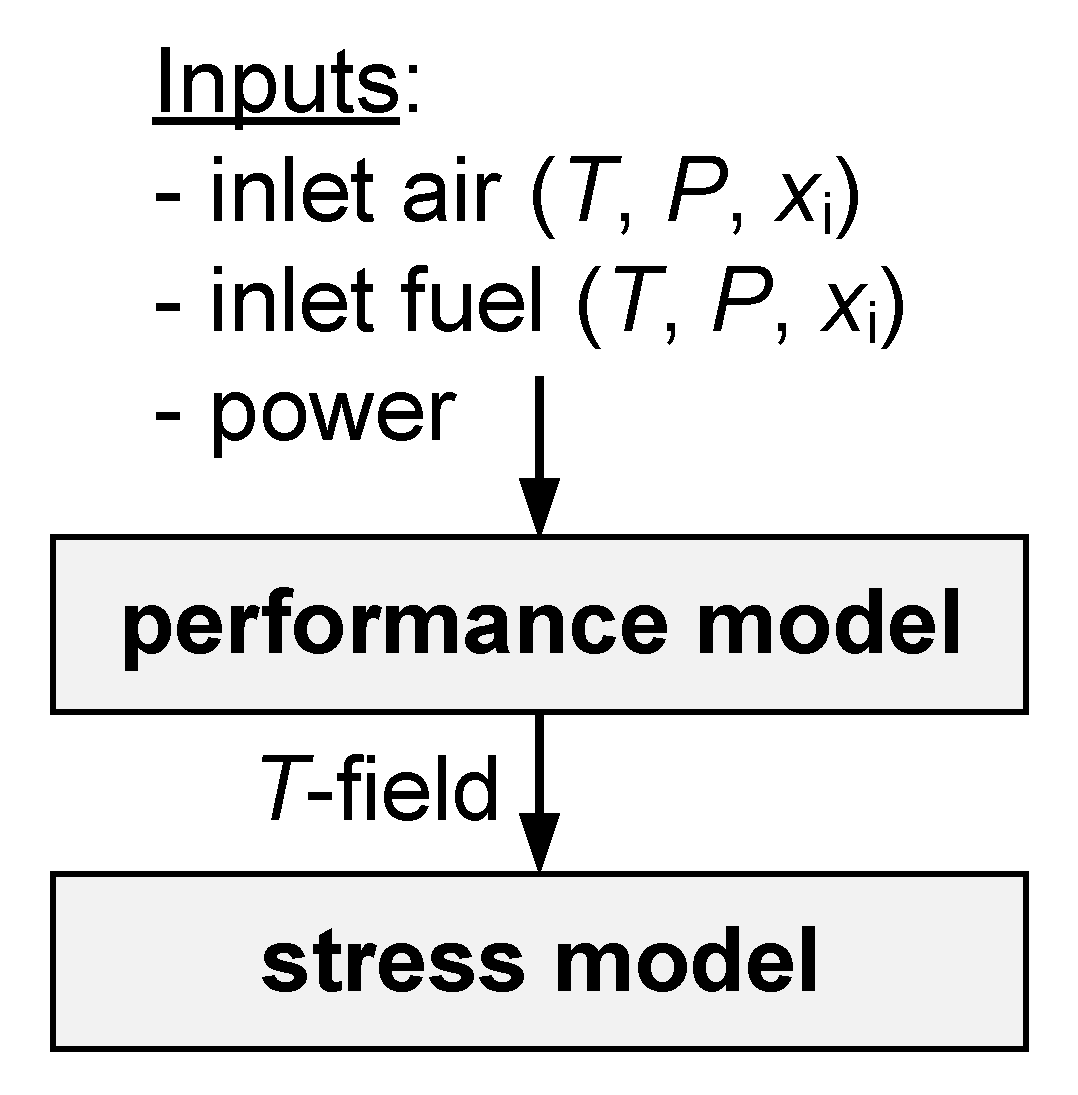
3. Mathematical Model
3.1. Energy and Mass Conservation
3.2. Electrochemistry
3.3. Thermo-Mechanics of Solid Components
3.4. System Variables
3.5. Degradation and Failure Mechanisms
3.6. Model Implementation and Numerical Solution Methods
4. Results and Discussion
4.1. Model Verification and Thermodynamic Steady State Performance
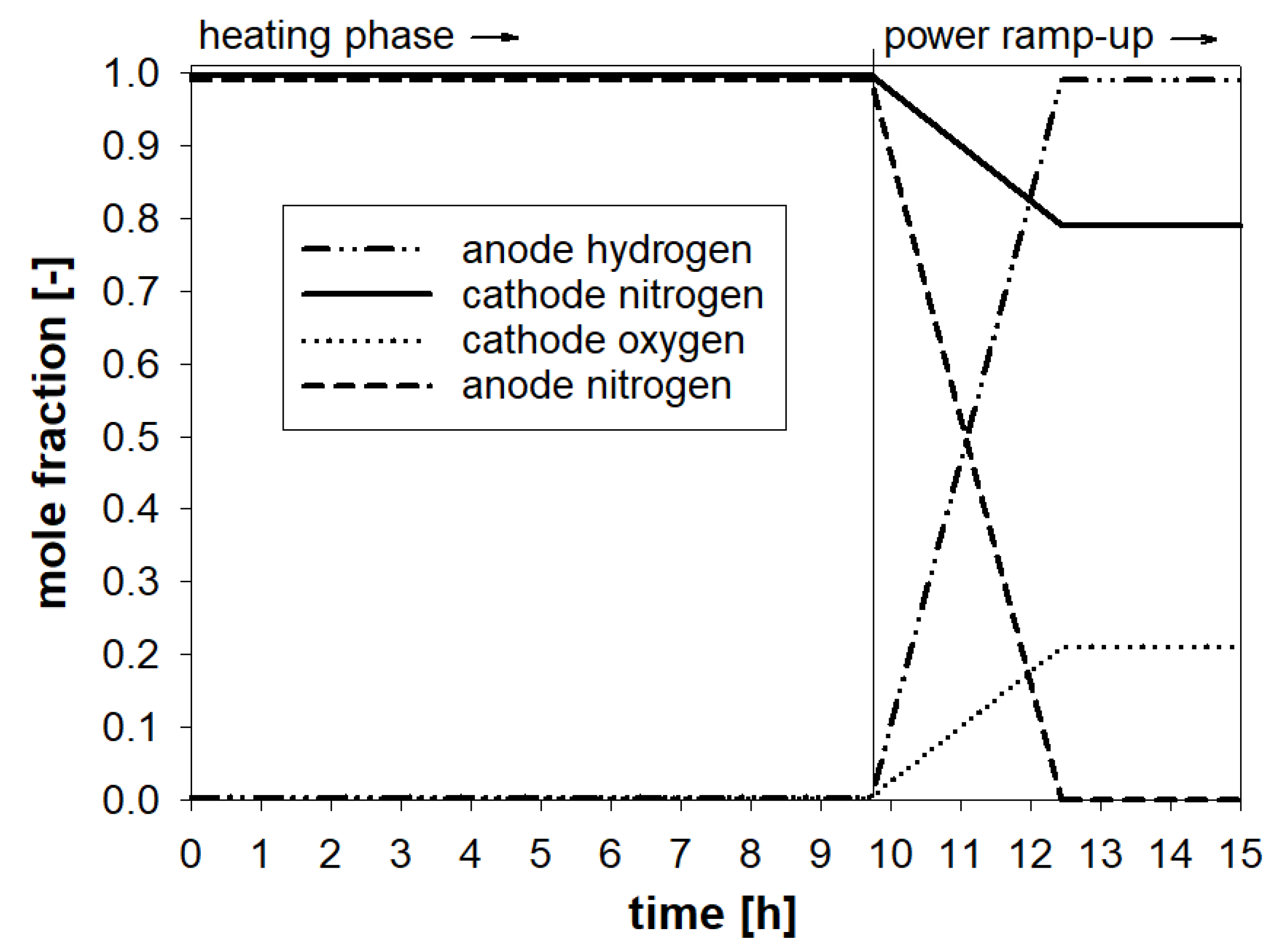
4.2. Start-Up Procedure
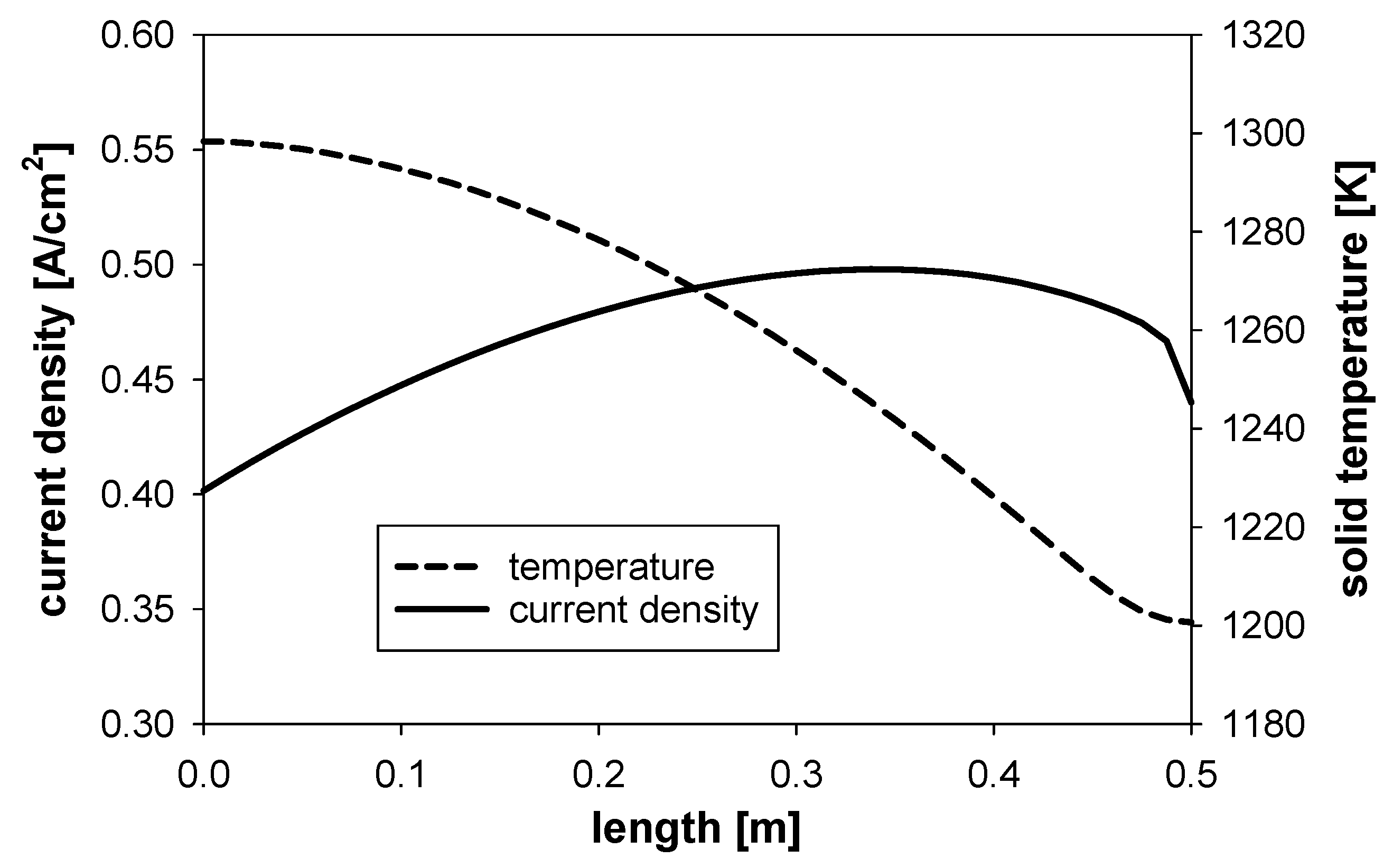
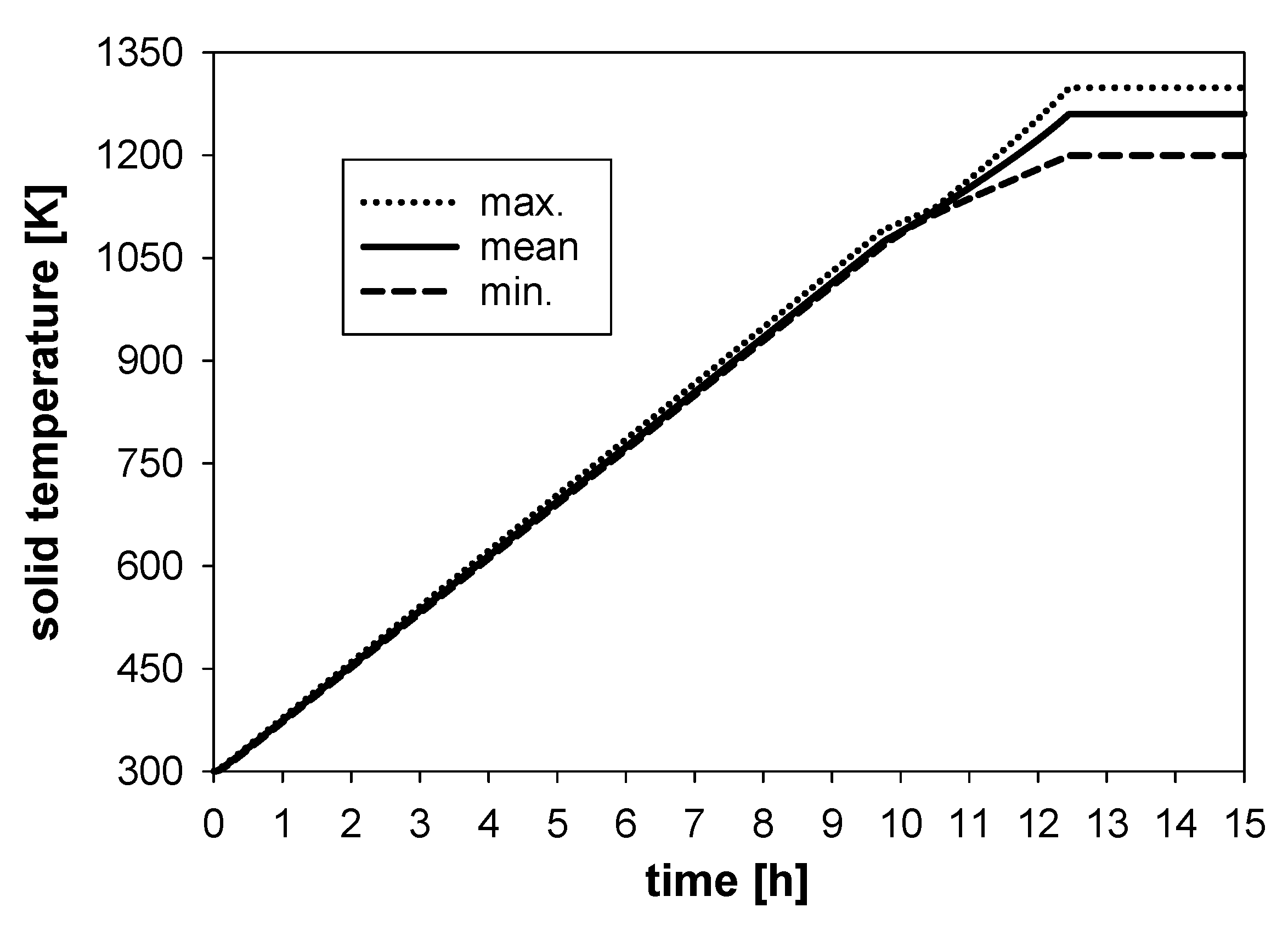
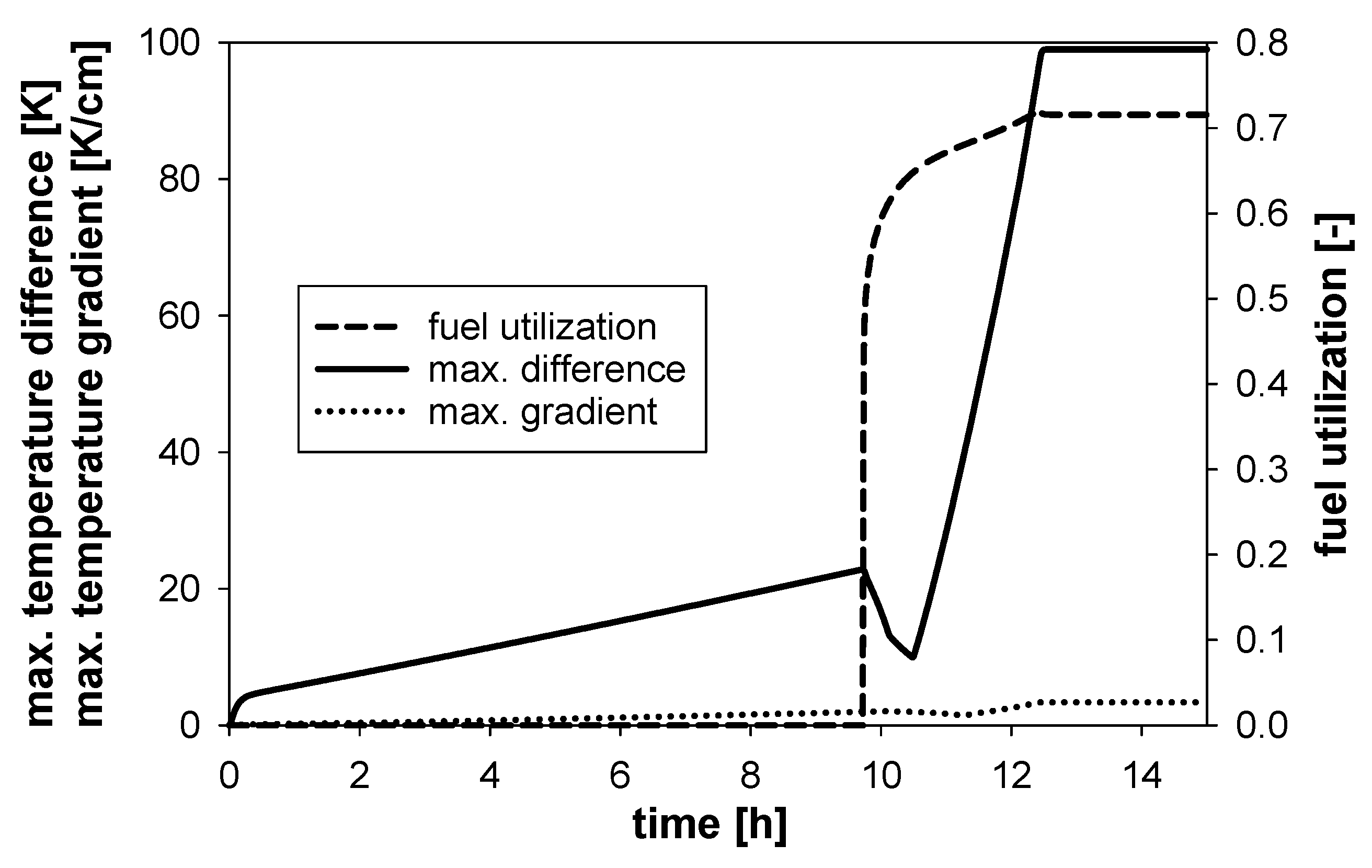
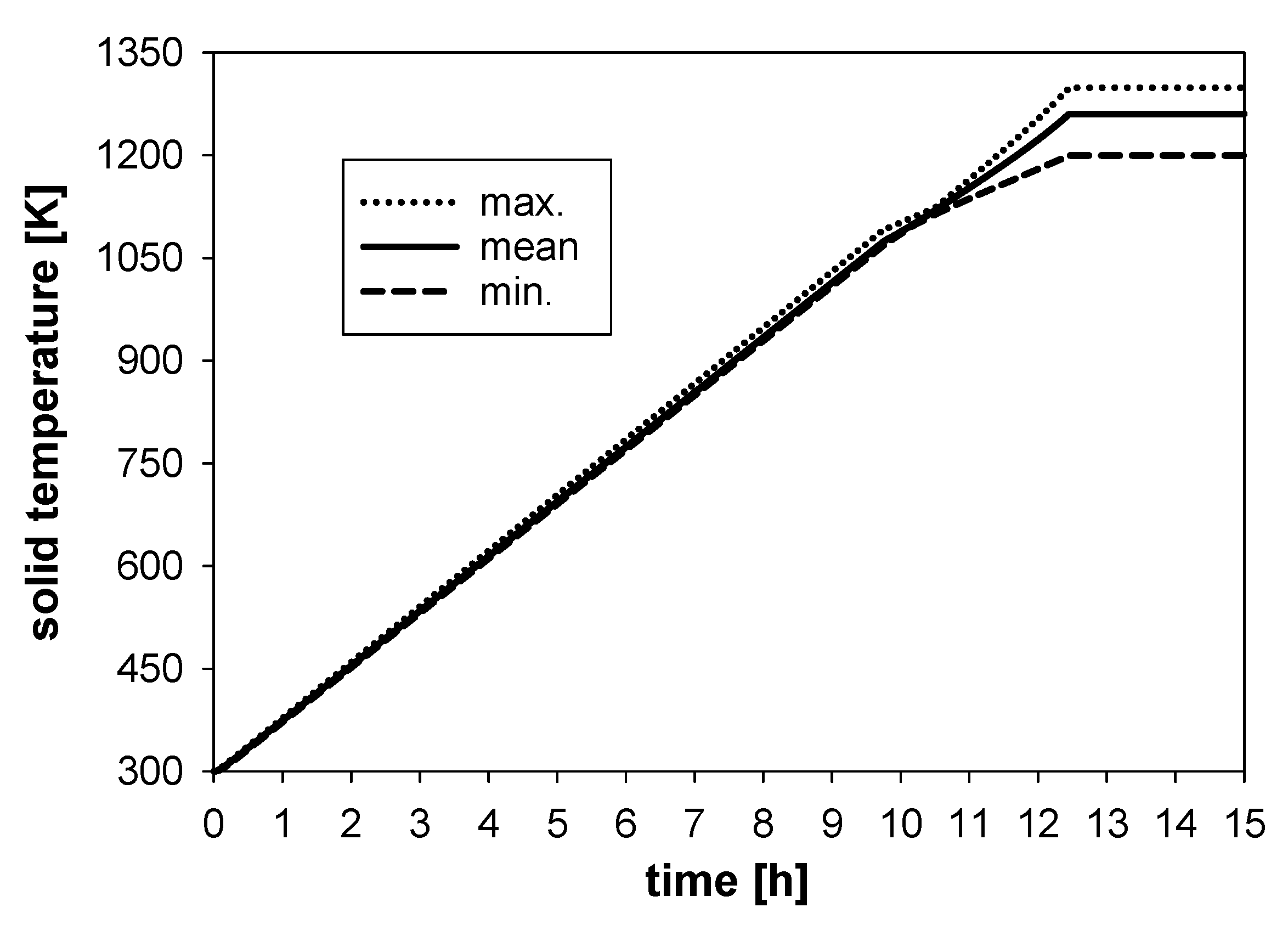
4.3. Performance and Temperature Response
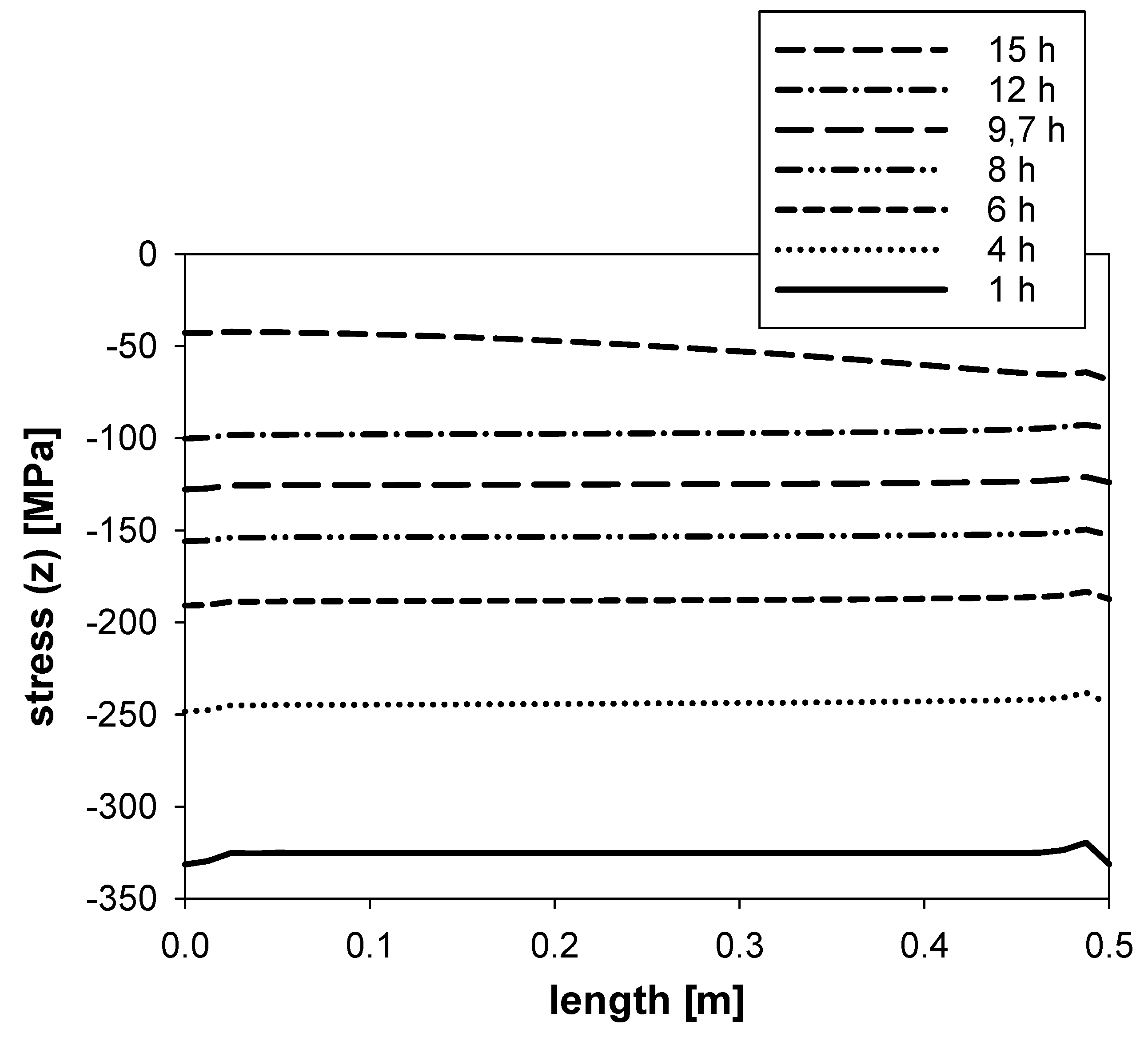
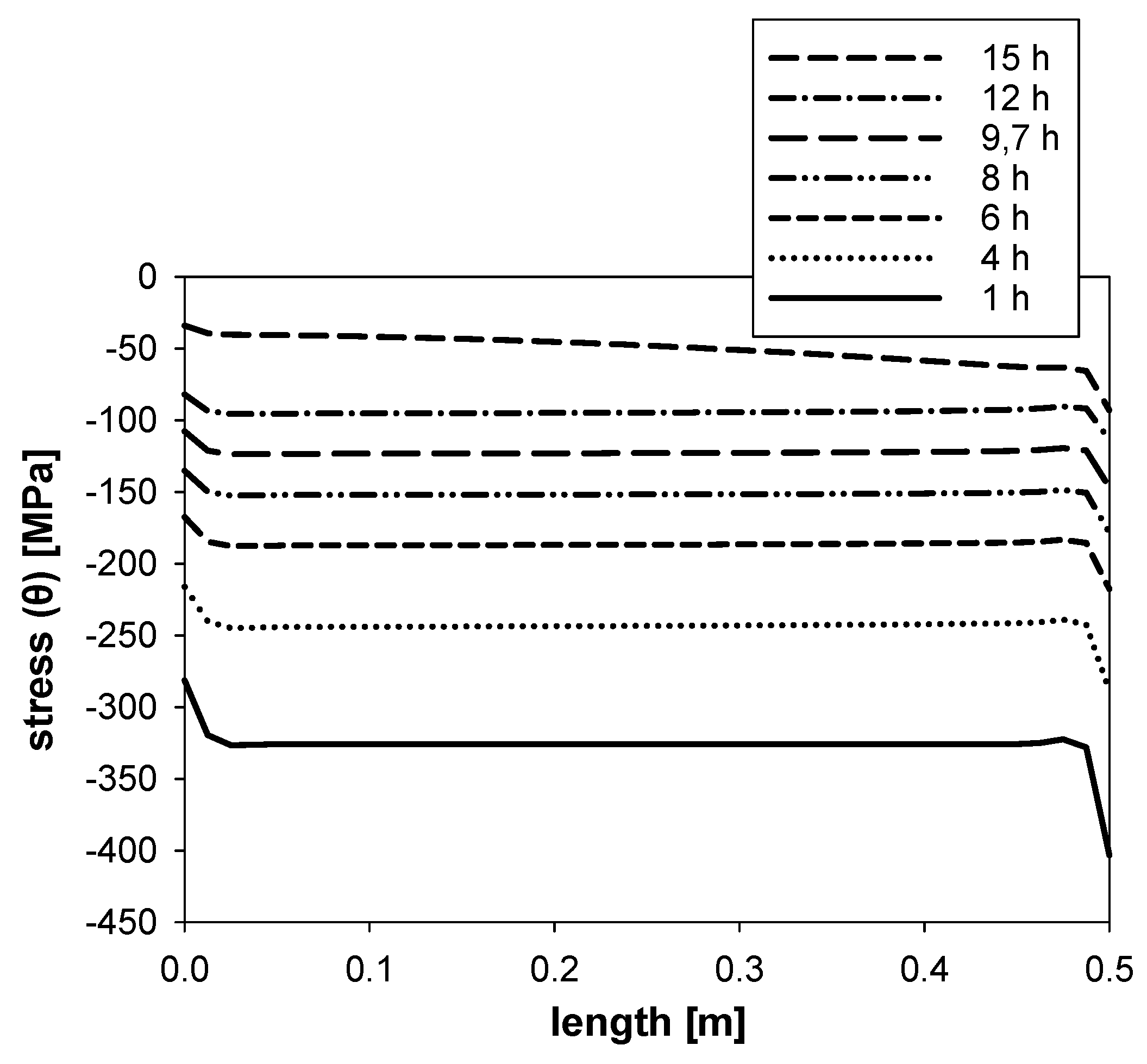
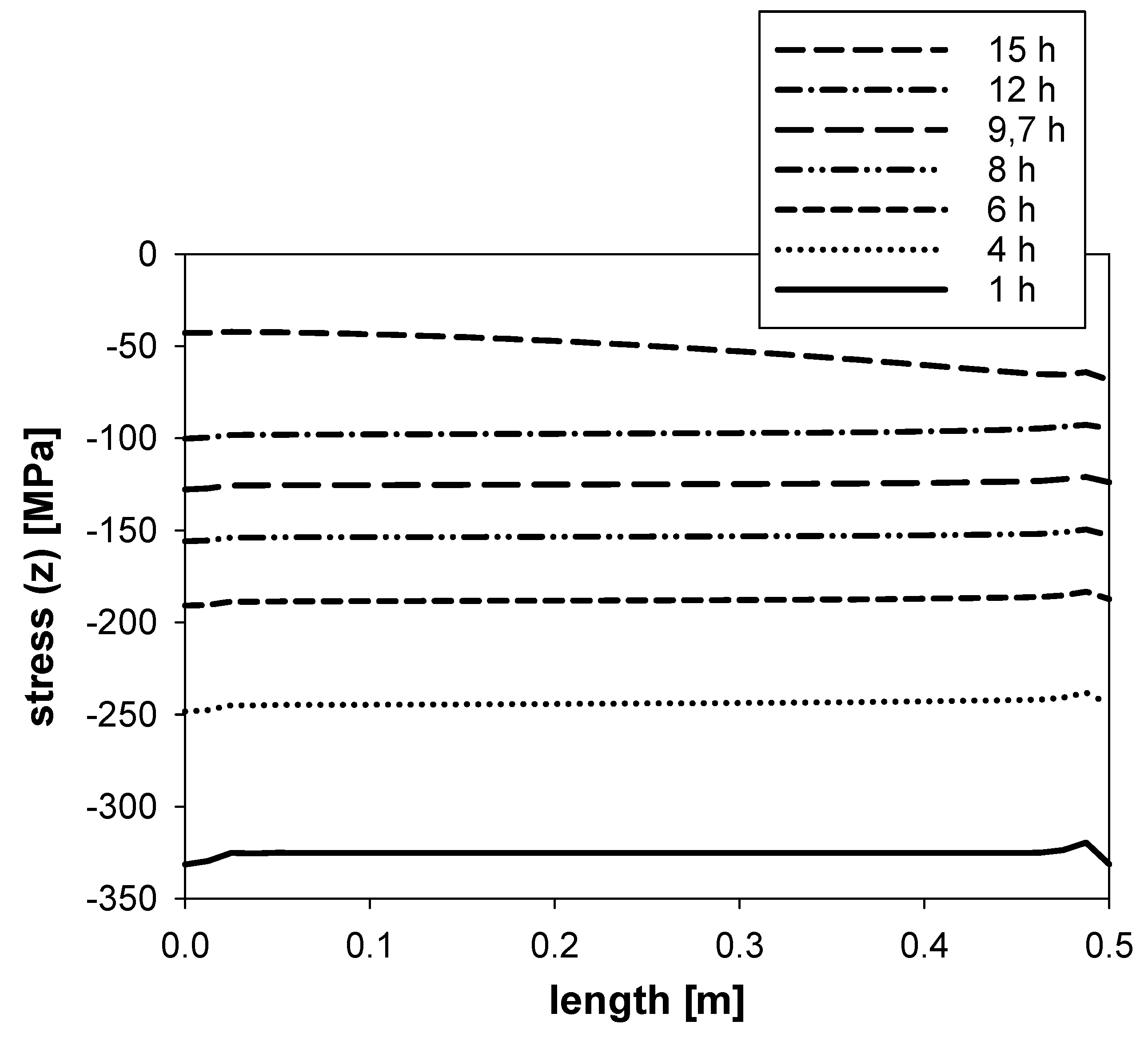
4.4. Stress Distributions and Displacements
5. Conclusions and Final Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
List of symbols
| A | area [m] |
| a | activity [-] |
| C | gas concentration [mol/m] |
| heat capacity [J/(mol K)] | |
| E | Young’s modulus [Pa] |
| Gibbs potential [V] | |
| F | Faraday constant [C/mol], force [kg/(m s)] |
| fuel utilization [-] | |
| h | enthalpy [J/mol] |
| heat transfer coefficient [W/(m K)] | |
| i | current density [A/m] |
| I | current [A] |
| j | index for anode, cathode, electrolyte [-] |
| L | length [m] |
| lower heating value [J/mol] | |
| mass flow [kg/s] | |
| mole flow [mol/s] | |
| p | partial pressure [Pa] |
| P | power [W] |
| R | universal gas constant [J/(mol K)], ohmic resistance [] |
| r | radius, spatial distribution variable in radial direction [m] |
| reaction rate [mol/s] | |
| t | time [s, h] |
| u | displacement [m] |
| v | fluid velocity [m/s] |
| V | voltage [V] |
| T | temperature [K] |
| difference between operation and sintering temperature [K] | |
| z | number of electrons [-], spatial distribution variable in axial direction [m] |
| thermal expansion coefficient [1/K] | |
| constant for Butler-Volmer equation [-], thermo-mechanical coefficient [Pa/K] | |
| heat capacity ratio [-] | |
| strain [-] | |
| overpotential [-], efficiency [-] | |
| thermal conductivity [W/(K m)], Lamé coefficient [Pa] | |
| Lamé coefficient [Pa] | |
| density [kg/m] | |
| Poisson ratio [-] | |
| stress [Pa] | |
| shear stress [Pa] |
List of subscripts
| activation overpotential losses | |
| concentration polarisation loss | |
| electrical | |
| f | forward reaction |
| g | gaseous |
| i | chemial species |
| open circuit | |
| ohmic loss | |
| oxidation | |
| r | reverse reaction, r-coordinate |
| reduction | |
| s | solid |
| safety gas | |
| triple-phase boundary | |
| z | spatial z-direction |
| spatial -direction |
List of superscripts
| anode | |
| cathode |
List of abbreviations
| AC | alternating current |
| CV | controlled variable(s) |
| DC | direct current |
| DOF | degree(s) of freedom |
| FD | finite difference |
| FU | fuel utilization |
| MV | manipulated variable(s) |
| PDAIE | partial differential algebraic integral equation(s) |
| SE | systems engineering |
| SOFC | solid oxide fuel cell(s) |
| TPB | triple-phase boundary |
References
- Adams, T., II; Nease, J.; Tucker, D.; Barton, P. Energy conversion with solid oxide fuel cell systems: A review of concepts and outlooks for the short- and long-term. Ind. Eng. Chem. Res. 2013, 52, 3089–3111. [Google Scholar] [CrossRef]
- Braun, R.; Klein, S.; Reindl, D. Evaluation of system configurations for solid oxide fuel cell-based micro-combined heat and power generators in residential applications. J. Power Sources 2006, 158, 1290–1305. [Google Scholar] [CrossRef]
- Edwards, P.; Kuznetsov, V.; David, W.; Brandon, N. Hydrogen and fuel cells: Towards a sustainable energy future. Energy Policy 2008, 36, 4356–4362. [Google Scholar] [CrossRef]
- O’Hayre, R.; Cha, S.; Colella, W.; Prinz, F. Fuel Cell Fundamentals; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Lawlor, V.; Griesser, S.; Buchinger, G.; Olabi, A.; Cordiner, S.; Meissner, D. Review of the micro-tubular solid oxide fuel cell. part I. stack design issues and research activities. J. Power Sources 2009, 193, 387–399. [Google Scholar] [CrossRef]
- Choudhury, A.; Chandra, H.; Arora, A. Application of solid oxide fuel cell technology for power generation—A review. Renew. Sustain. Energy Rev. 2013, 20, 430–442. [Google Scholar] [CrossRef]
- Stambouli, A.; Traversa, E. Solid oxide fuel cells (sofcs): A review of an environmentally clean and efficient source of energy. Renew. Sustain. Energy Rev. 2002, 6, 433–455. [Google Scholar] [CrossRef]
- Zhang, X.; Chan, S.; Li, G.; Ho, H.; Li, J.; Feng, Z. A review of integration strategies for solid oxide fuel cells. J. Power Sources 2010, 195, 685–702. [Google Scholar] [CrossRef]
- Cavalli, A.; Aravind, P. Effect of selected representative biomass gasification tar compounds on ni-gdc solid oxide fuel cells. Int. J. Hydrog. Energy 2021, 46, 21124–21135. [Google Scholar] [CrossRef]
- Jacobson, A. Materials for solid oxide fuel cells. Chem. Mater. 2010, 22, 660–674. [Google Scholar] [CrossRef]
- Kuramoto, K.; Hosokai, S.; Matsuoka, K.; Ishiyama, T.; Kishimoto, H.; Yamaji, K. Degradation behaviors of sofc due to chemical interaction between ni-ysz anode and trace gaseous impurities in coal syngas. Fuel Process. Technol. 2017, 160, 8–18. [Google Scholar] [CrossRef]
- Lanzini, A.; Ferrero, D.; Papurello, D.; Santarelli, M. Reporting degradation from different fuel contaminants in ni-anode sofcs. Fuel Cells 2017, 17, 423–433. [Google Scholar] [CrossRef]
- Martinez, A.; Gerdes, K.; Gemmen, R.; Poston, J. Thermodynamic analysis of interactions between ni-based solid oxide fuel cells (sofc) anodes and trace species in a survey of coal syngas. J. Power Sources 2010, 195, 5206–5212. [Google Scholar] [CrossRef]
- Wang, Y.; Li, W.; Ma, L.; Li, W.; Liu, X. Degradation of solid oxide electrolysis cells: Phenomena, mechanisms, and emerging mitigation strategies—A review. J. Mater. Sci. Technol. 2020, 55, 35–55. [Google Scholar] [CrossRef]
- Peksen, M. Numerical thermomechanical modelling of solid oxide fuel cells. Prog. Energy Combust. Sci. 2015, 48, 1–20. [Google Scholar] [CrossRef]
- Timurkutluk, B.; Mat, M. A performance prediction tool for solid oxide fuel cells after single redox cycle. Fuel Cells 2015, 15, 71–89. [Google Scholar] [CrossRef]
- Xiang, Y.; Da, Y.; Zhong, Z.; Shikazono, N.; Jiao, Z. Thermo-mechanical stress analyses of solid oxide fuel cell anode based on three-dimensional microstructure reconstruction. Int. J. Hydrog. Energy 2020, 45, 19791–19800. [Google Scholar] [CrossRef]
- Chen, M.-H.; Jiang, T. The analyses of the start-up process of a planar, anode-supported solid oxide fuel cell using three different start-up procedures. J. Power Sources 2012, 220, 331–341. [Google Scholar] [CrossRef]
- Zheng, K.; Kuang, Y.; Rao, Z.; Shen, S. Numerical study on the effect of bi-polar plate geometry in the sofc heating-up process. J. Renew. Sustain. Energy 2019, 11, 014301. [Google Scholar] [CrossRef]
- Halinen, M.; Thomann, O.; Kiviaho, J. Experimental study of sofc system heat-up without safety gases. Int. J. Hydrog. Energy 2014, 39, 552–561. [Google Scholar] [CrossRef]
- Choudhary, T.; Sanjay. Computational analysis of ir-sofc: Transient, thermal stress, carbon deposition and flow dependency. Int. J. Hydrog. Energy 2016, 41, 10212–10227. [Google Scholar] [CrossRef]
- Ki, J.; Kim, D. Computational model to predict thermal dynamics of planar solid oxide fuel cell stack during start-up process. J. Power Sources 2010, 195, 3186–3200. [Google Scholar] [CrossRef]
- Al-Masri, A.; Peksen, M.; Blum, L.; Stolten, D. A 3d cfd model for predicting the temperature distribution in a full scale apu sofc short stack under transient operating conditions. Appl. Energy 2014, 135, 539–547. [Google Scholar] [CrossRef]
- Peksen, M.; Al-Masri, A.; Blum, L.; Stolten, D. 3D transient thermomechanical behaviour of a full scale sofc short stack. Int. J. Hydrog. Energy 2013, 38, 4099–4107. [Google Scholar] [CrossRef]
- Peksen, M. Safe heating-up of a full scale sofc system using 3d multiphysics modelling optimisation. Int. J. Hydrog. Energy 2018, 43, 354–362. [Google Scholar] [CrossRef]
- Eapen, D.E.; Suresh, R.; Patil, S.; Rengaswamy, R. A systems engineering perspective on electrochemical energy technologies and a framework for application driven choice of technology. Renew. Sustain. Energy Rev. 2021, 147, 111165. [Google Scholar] [CrossRef]
- Oh, S.-R.; Sun, J.; Dobbs, H.; King, J. Model predictive control for power and thermal management of an integrated solid oxide fuel cell and turbocharger system. IEEE Trans. Control Syst. Technol. 2014, 22, 911–920. [Google Scholar]
- Fergus, J.W. Solid Oxide Fuel Cells; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2012; Chapter 14; pp. 671–700. [Google Scholar]
- Gellings, P.J.; Bouwmeester, H.J. Handbook of Solid State Electrochemistry; CRC: Boca Raton, FL, USA, 1997. [Google Scholar]
- Li, P.-W.; Chyu, M.K. Simulation of the chemical/electrochemical reactions and heat/mass transfer for a tubular sofc in a stack. J. Power Sources 2003, 124, 487–498. [Google Scholar] [CrossRef]
- Colombo, K.W.E.; Kharton, V.V.; Berto, F.; Paltrinieri, N. Mathematical modeling and simulation of hydrogen-fueled solid oxide fuel cell system for micro-grid applications—Effect of failure and degradation on transient performance. Energy 2020, 202, 117752. [Google Scholar] [CrossRef]
- Sammes, N.; Du, Y.; Bove, R. Design and fabrication of a 100w anode supported micro-tubular sofc stack. J. Power Sources 2005, 145, 428–434. [Google Scholar] [CrossRef]
- Li, G.; Gou, Y.; Qiao, J.; Sun, W.; Wang, Z.; Sun, K. Recent progress of tubular solid oxide fuel cell: From materials to applications. J. Power Sources 2020, 477, 228693. [Google Scholar] [CrossRef]
- Ho, T.X.; Kosinski, P.; Hoffmann, A.C.; Vik, A. Modeling of transport, chemical and electrochemical phenomena in a cathode-supported sofc. Chem. Eng. Sci. 2009, 64, 3000–3009. [Google Scholar] [CrossRef]
- Chelmehsara, M.E.; Mahmoudimehr, J. Techno-economic comparison of anode-supported, cathode-supported, and electrolyte-supported sofcs. Int. J. Hydrog. Energy 2018, 43, 15521–15530. [Google Scholar] [CrossRef]
- Ilbas, M.; Kumuk, B. Numerical modelling of a cathode-supported solid oxide fuel cell (sofc) in comparison with an electrolyte-supported model. J. Energy Inst. 2019, 92, 682–692. [Google Scholar] [CrossRef]
- Huang, K.; Singhal, S. Cathode-supported tubular solid oxide fuel cell technology: A critical review. J. Power Sources 2013, 237, 84–97. [Google Scholar] [CrossRef]
- Mueller, F.; Jabbari, F.; Brouwer, J. On the intrinsic transient capability and limitations of solid oxide fuel cell systems. J. Power Sources 2009, 187, 452–460. [Google Scholar] [CrossRef] [Green Version]
- NETL. Fuel Cell Handbook; US Department of Energy, National Energy Technology Laboratory: Morgantown, WV, USA, November 2004.
- Vielstich, W.; Lamm, A.; Gasteiger, H.A. (Eds.) Handbook of Fuel Cells; Wiley: Hoboken, NJ, USA, 2009; Volume 5. [Google Scholar]
- Vielstich, W.; Lamm, A.; Gasteiger, H.A. (Eds.) Handbook of Fuel Cells; Wiley: Hoboken, NJ, USA, 2009; Volume 6. [Google Scholar]
- Wu, X.; Gao, D. Optimal robust control strategy of a solid oxide fuel cell system. J. Power Sources 2018, 374, 225–236. [Google Scholar] [CrossRef]
- Kim-Lohsoontorn, P.; Priyakorn, F.; Wetwatana, U.; Laosiripojana, N. Modelling of a tubular solid oxide fuel cell with different designs of indirect internal reformer. J. Energy Chem. 2014, 23, 251–263. [Google Scholar] [CrossRef]
- Spivey, B.; Edgar, T. Dynamic modeling, simulation, and mimo predictive control of a tubular solid oxide fuel cell. J. Process. Control 2012, 22, 1502–1520. [Google Scholar] [CrossRef]
- Jiang, J.; Li, X.; Li, J. Modeling and model-based analysis of a solid oxide fuel cell thermal-electrical management system with an air bypass valve. Electrochim. Acta 2015, 177, 250–263. [Google Scholar] [CrossRef]
- Chen, J.; Song, W.; Xu, D. Thermal management in catalytic heat-recirculating micro-combustors: A computational fluid dynamics study. Appl. Therm. Eng. 2019, 160, 114073. [Google Scholar] [CrossRef]
- Karagiannidis, S.; Mantzaras, J.; Jackson, G.; Boulouchos, K. Hetero-/homogeneous combustion and stability maps in methane-fueled catalytic microreactors. Proc. Combust. Inst. 2007, 31, 3309–3317. [Google Scholar] [CrossRef]
- Li, Q.; Wang, J.; Meng, L.; Li, J.; Guo, Z. Cfd study on stability limits of hydrogen/air premixed flames in planar micro-combustors with catalytic walls. Appl. Therm. Eng. 2017, 121, 325–335. [Google Scholar] [CrossRef]
- Shantanu, M.; Reddy, V.M.; Karmakar, S. Experimental and numerical studies on heat recirculated high intensity meso-scale combustor for mini gas turbine applications. Energy Convers. Manag. 2018, 176, 324–333. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, Z.; Yang, W.; Zhou, J.; Liu, J.; Wang, Z.; Cen, K. Combustion of hydrogen-air in micro combustors with catalytic pt layer. Energy Convers. Manag. 2010, 51, 1127–1133. [Google Scholar] [CrossRef]
- Zhou, J.; Wang, Y.; Yang, W.; Liu, J.; Wang, Z.; Cen, K. Combustion of hydrogen-air in catalytic micro-combustors made of different material. Int. J. Hydrog. Energy 2009, 34, 3535–3545. [Google Scholar] [CrossRef]
- Zhang, X.; Keramati, H.; Arie, M.; Singer, F.; Tiwari, R.; Shooshtari, A.; Ohadi, M. Recent developments in high temperature heat exchangers: A review. Front. Heat Mass Transf. 2018, 11. [Google Scholar] [CrossRef] [Green Version]
- Fardadi, M.; McLarty, D.; Jabbari, F. Actuator limitations in spatial temperature control of sofc. J. Fuel Cell Sci. Technol. 2013, 10, 031005. [Google Scholar] [CrossRef]
- Hering, M.; Wahl, S.; Meise, R. Characteristic blower map modeling for volume flow rate estimation in solid oxide fuel cell systems. Flow Meas. Instrum. 2018, 64, 116–125. [Google Scholar] [CrossRef]
- Cho, J.-H.; Yu, S.-S.; Kim, M.-Y.; Kang, S.-G.; Lee, Y.-D.; Ahn, K.-Y.; Ji, H.-J. Dynamic modeling and simulation of hydrogen supply capacity from a metal hydride tank. Int. J. Hydrog. Energy 2013, 38, 8813–8828. [Google Scholar] [CrossRef]
- Jiang, J.; Shen, T.; Deng, Z.; Fu, X.; Li, J.; Li, X. High efficiency thermoelectric cooperative control of a stand-alone solid oxide fuel cell system with an air bypass valve. Energy 2018, 152, 13–26. [Google Scholar] [CrossRef]
- Sorrentino, M.; Pianese, C. Model-based development of low-level control strategies for transient operation of solid oxide fuel cell systems. J. Power Sources 2011, 196, 9036–9045. [Google Scholar] [CrossRef]
- Sharifzadeh, M. Integration of process design and control: A review. Chem. Eng. Res. Des. 2013, 91, 2515–2549. [Google Scholar] [CrossRef] [Green Version]
- Stiller, C.; Thorud, B.; Bolland, O.; Kandepu, R.; Imsland, L. Control strategy for a solid oxide fuel cell and gas turbine hybrid system. J. Power Sources 2006, 158, 303–315. [Google Scholar] [CrossRef]
- Stiller, C. Design, Operation and Control Modelling of SOFC/GT Hybrid Systems. Ph.D. Thesis, Norwegian University of Science and Technology (NTNU), Trondheim, Norway, 2006. [Google Scholar]
- Colombo, K.E.; Kharton, V.; Berto, F.; Paltrinieri, N. Mathematical multi-physics modeling and simulation of a solid oxide fuel cell unit for thermo-mechanical stress analyses. J. Electrochem. Soc. 2020, 167, 044514. [Google Scholar] [CrossRef]
- Colombo, K.E.; Kharton, V.; Berto, F.; Paltrinieri, N. Transient simulation of failures during start-up and power cut of a solid oxide fuel cell system using multiphysics modeling. Mater. Des. Process. Commun. 2020, e177. [Google Scholar]
- Bird, R.B.; Stewart, W.E.; Lightfoot, E.N. Transport Phenomena; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Hetnarski, R.B.; Eslami, M.R. Thermal Stresses-Advanced Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Sadd, M. Elasticity, 3rd ed.; Academic Press: Boston, MA, USA, 2009; p. iii. [Google Scholar]
- Dwivedi, S. Solid oxide fuel cell: Materials for anode, cathode and electrolyte. Int. J. Hydrog. Energy 2020, 45, 23988–24013. [Google Scholar] [CrossRef]
- Sreedhar, I.; Agarwal, B.; Goyal, P.; Singh, S.A. Recent advances in material and performance aspects of solid oxide fuel cells. J. Electroanal. Chem. 2019, 848, 113315. [Google Scholar] [CrossRef]
- Hildenbrand, N.; Boukamp, B.; Nammensma, P.; Blank, D. Improved cathode/electrolyte interface of sofc. Solid State Ionics 2011, 192, 12–15. [Google Scholar] [CrossRef]
- Greco, F.; Frandsen, H.; Nakajo, A.; Madsen, M.F.; Herle, J.V. Modelling the impact of creep on the probability of failure of a solid oxide fuel cell stack. J. Eur. Ceram. Soc. 2014, 34, 2695–2704. [Google Scholar] [CrossRef]
- Giraud, S.; Canel, J. Young’s modulus of some sofcs materials as a function of temperature. J. Eur. Ceram. Soc. 2008, 28, 77–83. [Google Scholar] [CrossRef]
- Selçuk, A.; Merere, G.; Atkinson, A. The influence of electrodes on the strength of planar zirconia solid oxide fuel cells. J. Mater. Sci. 2001, 36, 1173–1182. [Google Scholar] [CrossRef]
- Kennouche, D.; Fang, Q.; Blum, L.; Stolten, D. Analysis of the cathode electrical contact in sofc stacks. J. Electrochem. Soc. 2018, 165, F677–F683. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.-C.; Lu, M.-J.; Jiang, W.; Tu, S.-T.; Zhang, X.-C. Effect of the geometrical size on time dependent failure probability of the solid oxide fuel cell. Int. J. Hydrog. Energy 2019, 44, 11033–11046. [Google Scholar] [CrossRef]
- Boldrin, P.; Ruiz-Trejo, E.; Mermelstein, J.; Menendez, J.B.; Reina, T.R.; Brandon, N. Strategies for carbon and sulfur tolerant solid oxide fuel cell materials, incorporating lessons from heterogeneous catalysis. Chem. Rev. 2016, 116, 13633–13684. [Google Scholar] [CrossRef] [PubMed]
- Haga, K.; Adachi, S.; Shiratori, Y.; Itoh, K.; Sasaki, K. Poisoning of sofc anodes by various fuel impurities. Solid State Ionics 2008, 179, 1427–1431. [Google Scholar] [CrossRef]
- Cheng, Z.; Zha, S.; Liu, M. Influence of cell voltage and current on sulfur poisoning behavior of solid oxide fuel cells. J. Power Sources 2007, 172, 688–693. [Google Scholar] [CrossRef]
- Hanasaki, M.; Uryu, C.; Daio, T.; Kawabata, T.; Tachikawa, Y.; Lyth, S.; Shiratori, Y.; Taniguchi, S.; Sasaki, K. Sofc durability against standby and shutdown cycling. J. Electrochem. Soc. 2014, 161, F850–F860. [Google Scholar] [CrossRef]
- Process Systems Enterprise (PSE), the Advanced Process Modelling Company. Available online: https://www.psenterprise.com/ (accessed on 22 June 2021).
- DataFit; Version 8.2.79; Oakdale Engineering: Oakdale, PA, USA, 2006.
- Pianko-Oprych, P.; Zinko, T.; Jaworski, Z. Modeling of thermal stresses in a microtubular solid oxide fuel cell stack. J. Power Sources 2015, 300, 10–23. [Google Scholar] [CrossRef]
- Pianko-Oprych, P.; Zinko, T.; Jaworski, Z. Simulation of thermal stresses for new designs of microtubular solid oxide fuel cell stack. Int. J. Hydrog. Energy 2015, 40, 14584–14595. [Google Scholar] [CrossRef] [Green Version]
- Colombo, K.W.; Kharton, V.V.; Berto, F.; Paltrinieri, N. Transient system-level performance and thermo-mechanical stress analysis of a solid oxide fuel cell-based power generation plant with a multi-physics approach. Comput. Chem. Eng. 2020, 140, 106972. [Google Scholar] [CrossRef]
- Schnadt, J.; Bruhwiler, P.; Patthey, L.; O’Shea, J.; Sodergren, S.; Odelius, M.; Ahuja, R.; Karis, O.; Bassler, M.; Persson, P.; et al. Experimental evidence for sub-3-fs charge transfer from an aromatic adsorbate to a semiconductor. Nature 2002, 418, 620–623. [Google Scholar] [CrossRef] [PubMed]
- Kang, J.-L.; Wang, C.-C.; Wong, D.S.-H.; Jang, S.-S.; Wang, C.-H. Digital twin model and dynamic operation for a plant-scale solid oxide fuel cell system. J. Taiwan Inst. Chem. Eng. 2021, 118, 60–67. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Constraint | Potential Effect | Limit |
|---|---|---|---|
| system | heat loss | performance loss | per design |
| SOFC | power density | increasing currents lead to higher concentration polarization and faster cell degradation | 80–90% [39,40,41] |
| SOFC | max. leakage rate (interconnects) | performance loss, failure due to leakage | 0.1% [39,40,41] |
| SOFC | min. temperature | performance loss, and failure due to thermo-mechanical stresses | 900 K [39,40,41,42] |
| SOFC | max. temperature | performance loss and failure due to thermo-mechanical stresses and chemical interaction | 1300 K [39,40,41] |
| SOFC | max. difference in thermal expansion coefficients | performance loss and failure due to thermo-mechanical stresses | 10–17% [39,40,41] |
| SOFC | transient temperature gradients | thermo-mechanical stresses | 20 K/cm [43,44] |
| SOFC | steady state temperature differences in axial direction of SOFC | thermo-mechanical stresses | 150 K [39,40,41] |
| SOFC | min. FU | thermo-mechanical stresses | 40% [39,40,41] |
| SOFC | max. FU | fuel starvation, efficiency loss | 90% [39,40,41] |
| SOFC | max. total pressure difference between fluid streams | mechanical stress | 3 bar [39,40,41] |
| combustor | air excess ratio | performance loss, emissions, flame instability | 6–12 [45] |
| combustor | residence time | flame instability, blowout [46,47,48,49,50] | |
| combustor | max. temperature | mechanical stress | 1400 K [42,46,51] |
| pre-heater | max. temperature | loss of strength | 1300 K [52] |
| blower | max. volume flow, pressure, rotational speed [53,54] | stress, flow instability, performance loss | defined by design |
| tank | max. pressure, discharge rate [55] | mechanical stress | |
| valve | speed, max. volume flow [56] | defined by design | |
| controller, actuator | speed, accuracy [57] | delay times, setpoint shift | |
| sensor | uncertainty, accuracy | delay times, setpoint shift |
| Controlled Variable | Value | Manipulated Variable | Value |
|---|---|---|---|
| electrical system power | 86.73 kW | electrical current | 131.1 A |
| mean solid temperature of SOFC | 1261 K | molar flow of air (blower capacity) | 18 mol s |
| FU of SOFC | 71.5% | molar flow of fuel to SOFC (fuel valve opening) | 1.15 mol s |
| pressure gradient across solid of SOFC | <0.1 bar | use of throttles (not shown in Figure 1) | - |
| combustion outlet temperature | - | fuel mass flow to combustor (fuel valve opening) | - |
| air temperature to SOFC | - | bypass ratio of air (not used here) | - |
| driving force for chemical kinetics in SOFC | - | fuel composition (not used here) | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eichhorn Colombo, K.W.; Kharton, V.V. Start-Up of a Solid Oxide Fuel Cell System with a View to Materials Science-Related Aspects, Control and Thermo-Mechanical Stresses. Crystals 2021, 11, 732. https://doi.org/10.3390/cryst11070732
Eichhorn Colombo KW, Kharton VV. Start-Up of a Solid Oxide Fuel Cell System with a View to Materials Science-Related Aspects, Control and Thermo-Mechanical Stresses. Crystals. 2021; 11(7):732. https://doi.org/10.3390/cryst11070732
Chicago/Turabian StyleEichhorn Colombo, Konrad W., and Vladislav V. Kharton. 2021. "Start-Up of a Solid Oxide Fuel Cell System with a View to Materials Science-Related Aspects, Control and Thermo-Mechanical Stresses" Crystals 11, no. 7: 732. https://doi.org/10.3390/cryst11070732
APA StyleEichhorn Colombo, K. W., & Kharton, V. V. (2021). Start-Up of a Solid Oxide Fuel Cell System with a View to Materials Science-Related Aspects, Control and Thermo-Mechanical Stresses. Crystals, 11(7), 732. https://doi.org/10.3390/cryst11070732