
Non-Mechanical Beam Steering with Polarization Gratings: A Review



Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Non-Mechanical Beam Steering with PGs
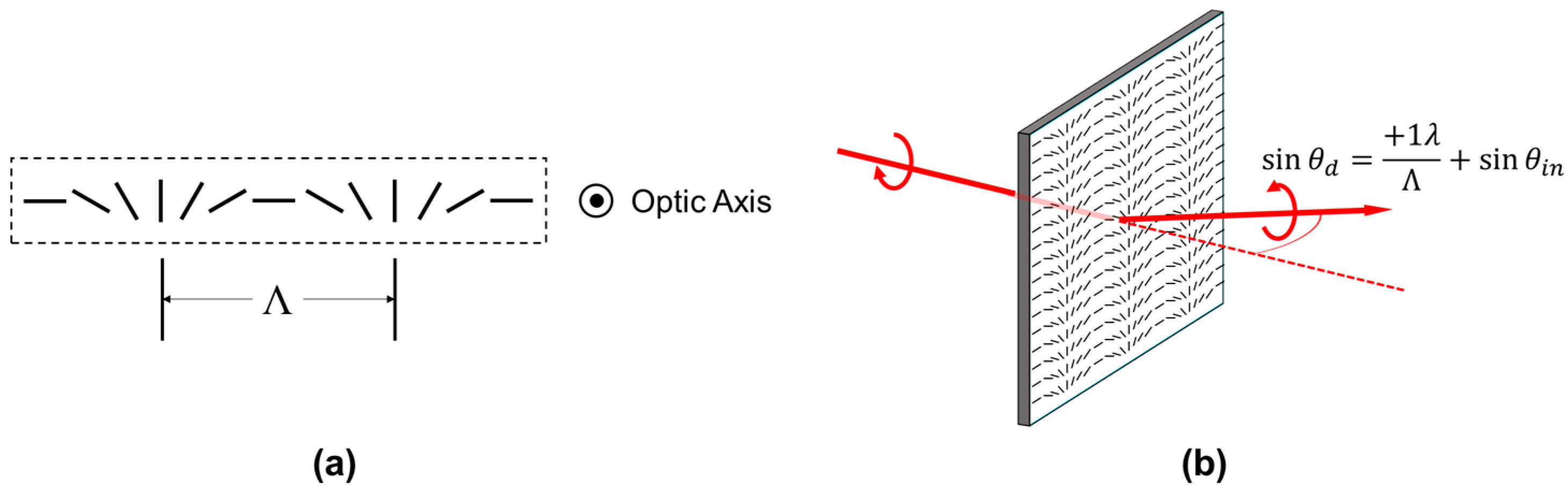
2.1. PG Fundamentals from a Beam Steering Perspective
- near 100% diffraction efficiency;
- polarization-selectable diffraction angle;
- wide acceptance angle;
- scalable aperture;
- transmissive operation;
- thin element thickness;
2.2. Optical Properties of PG-Based Non-Mechanical Steering Systems
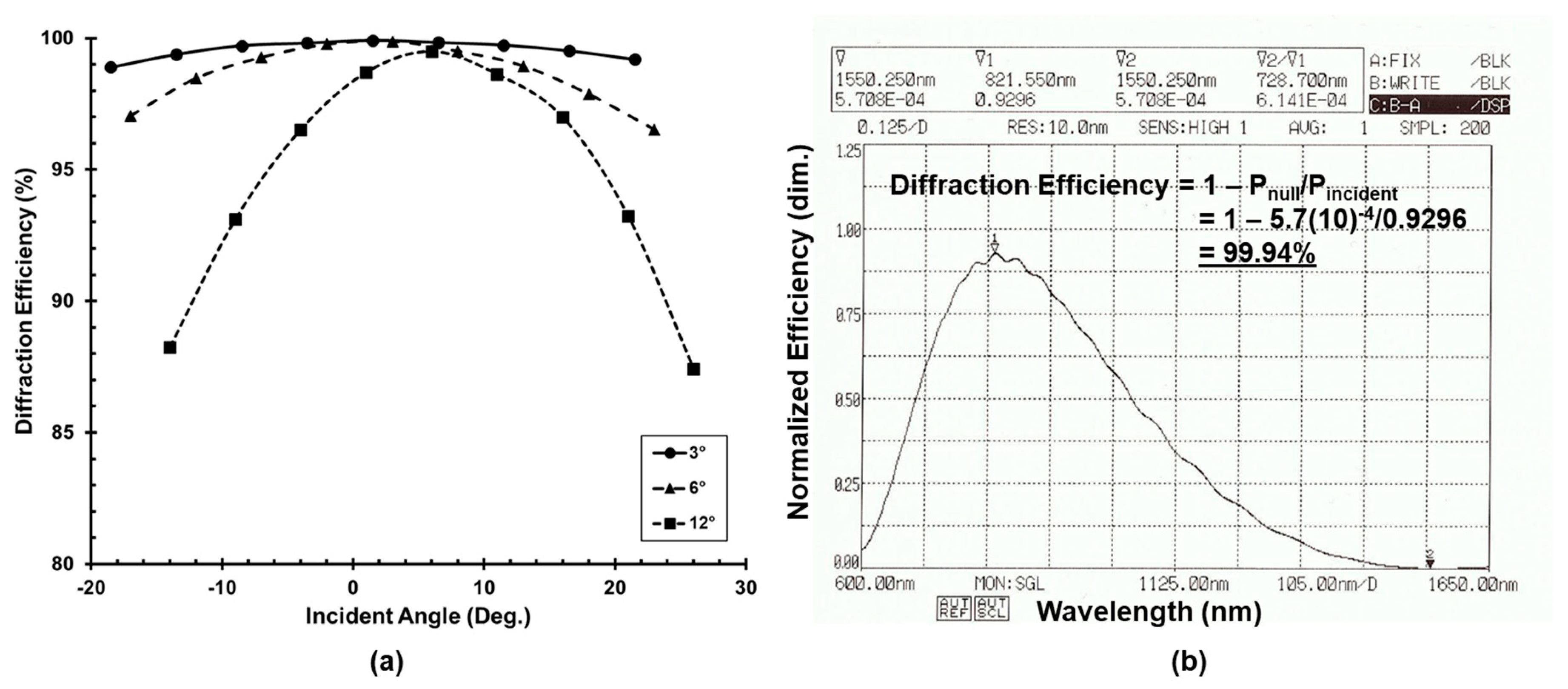
2.2.1. Spectral Properties
2.2.2. Steering Efficiency
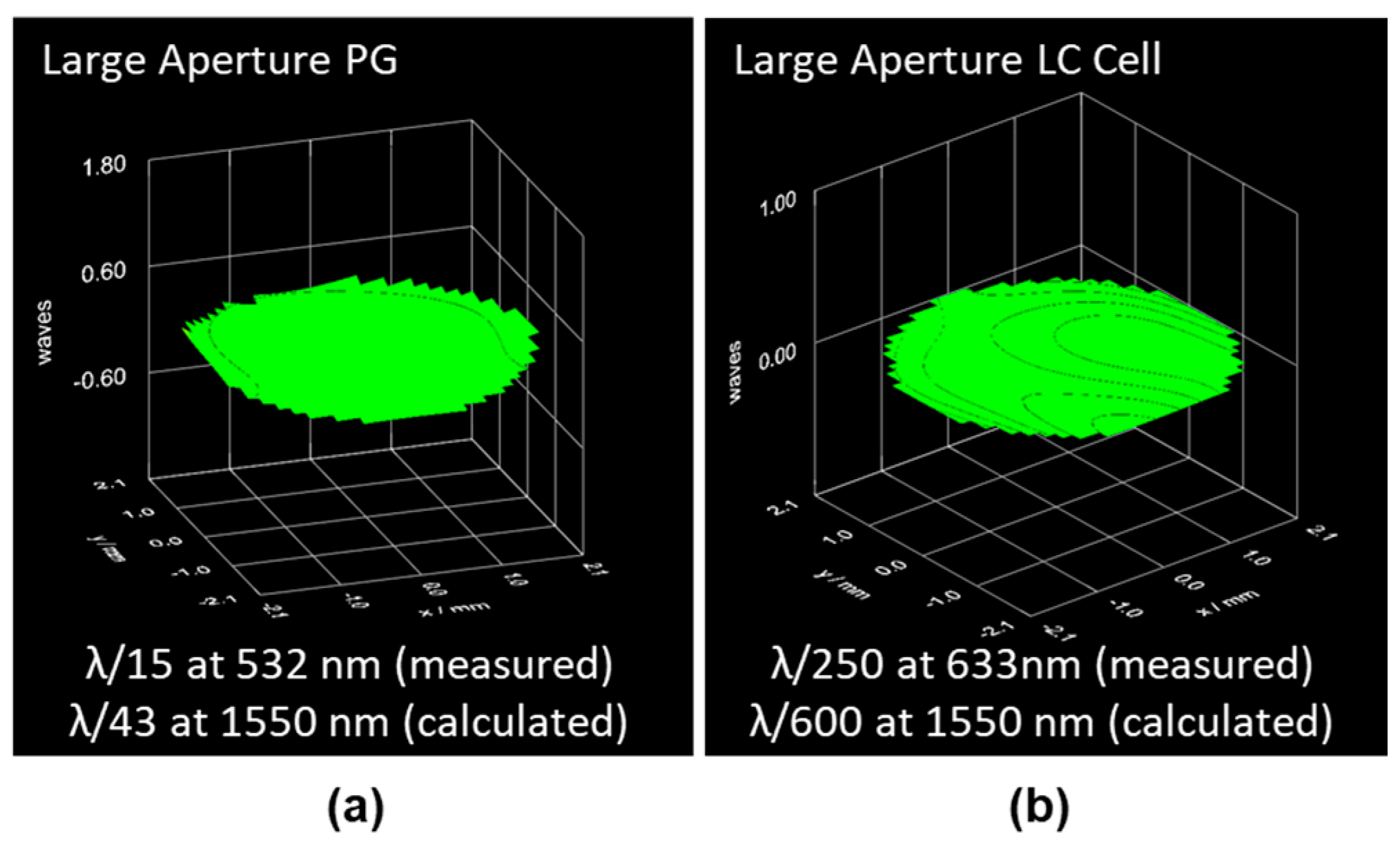
2.2.3. Wavefront Quality
2.2.4. Switching Dynamics
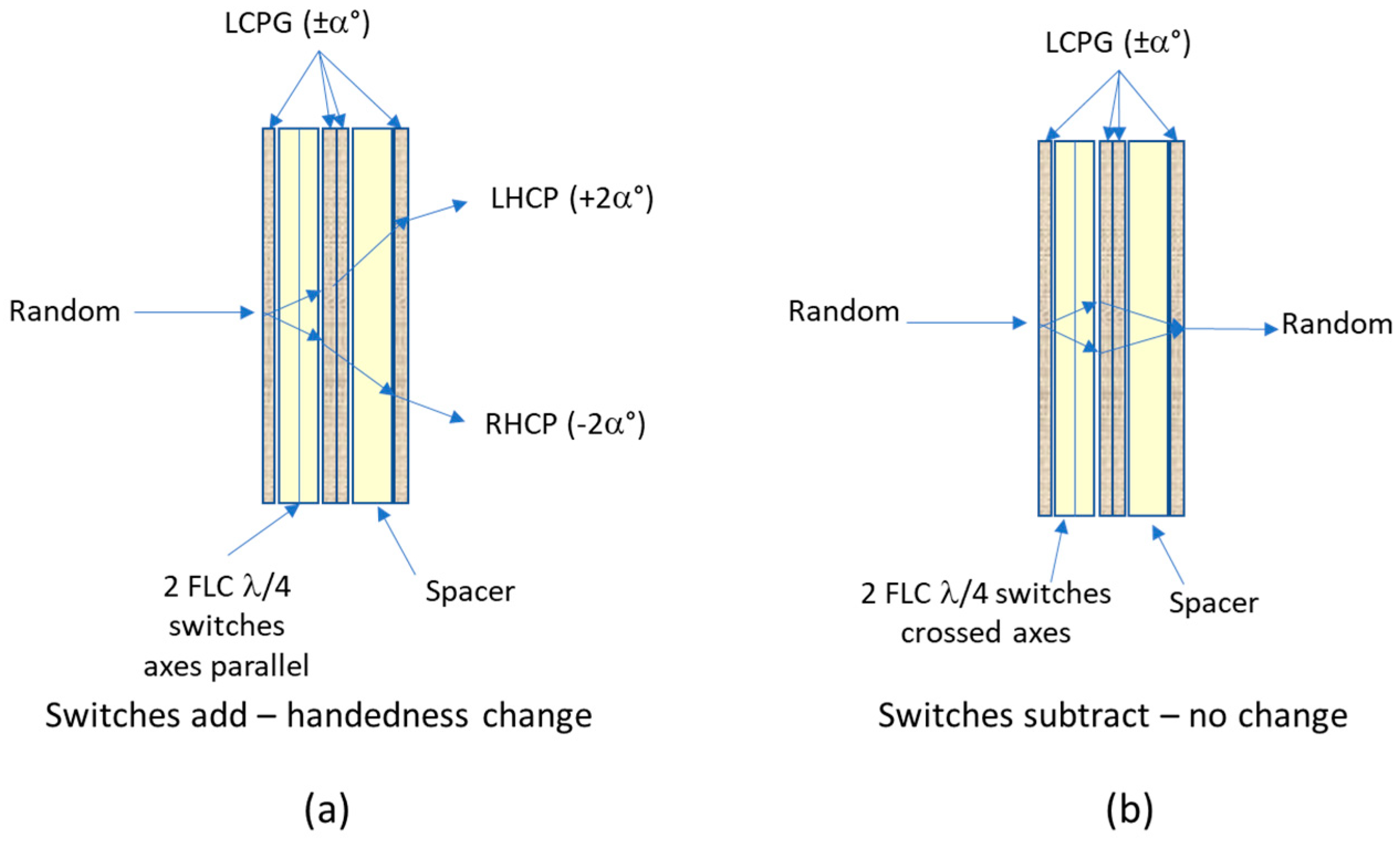
2.2.5. Polarization Considerations
3. Applications of Non-Mechanical Beam Steering with PGs
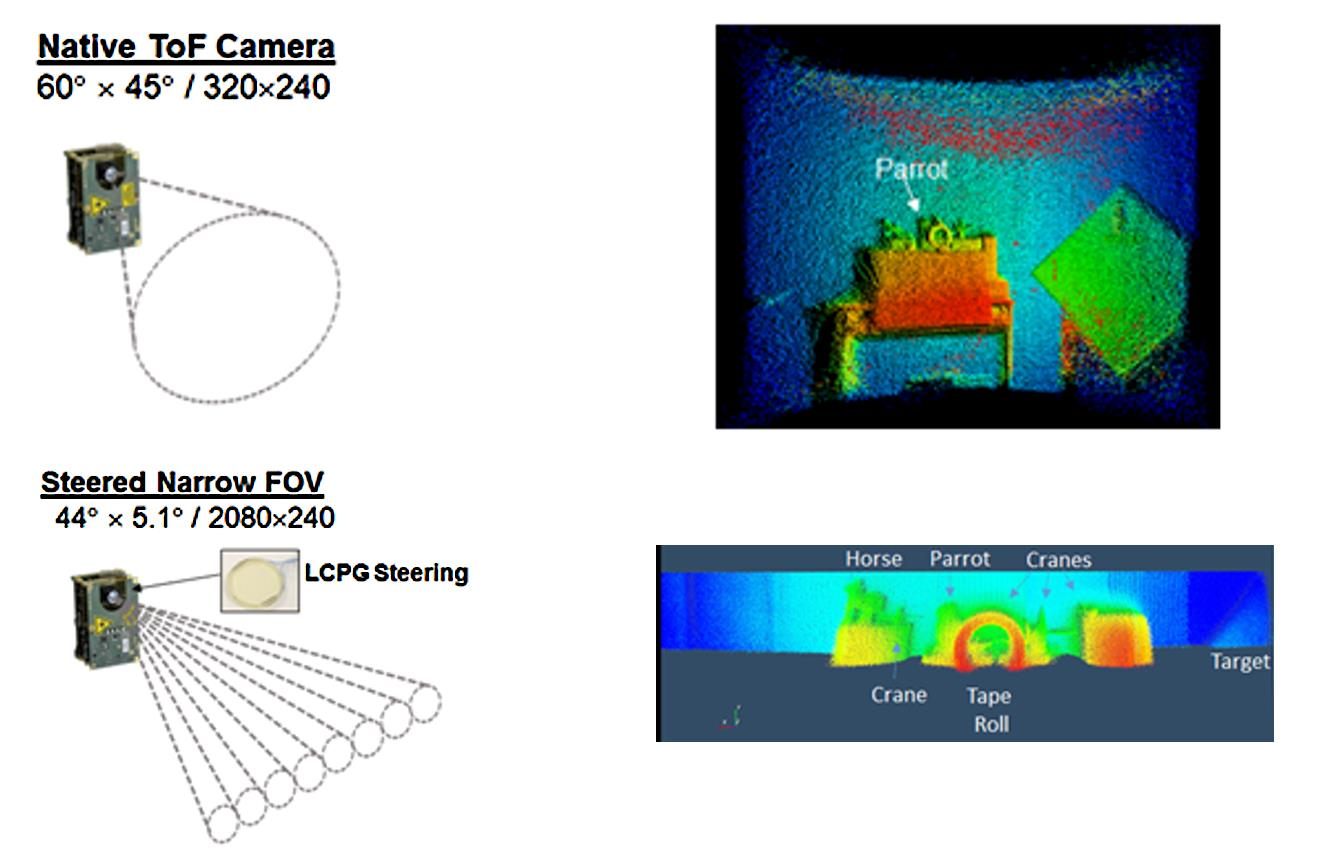
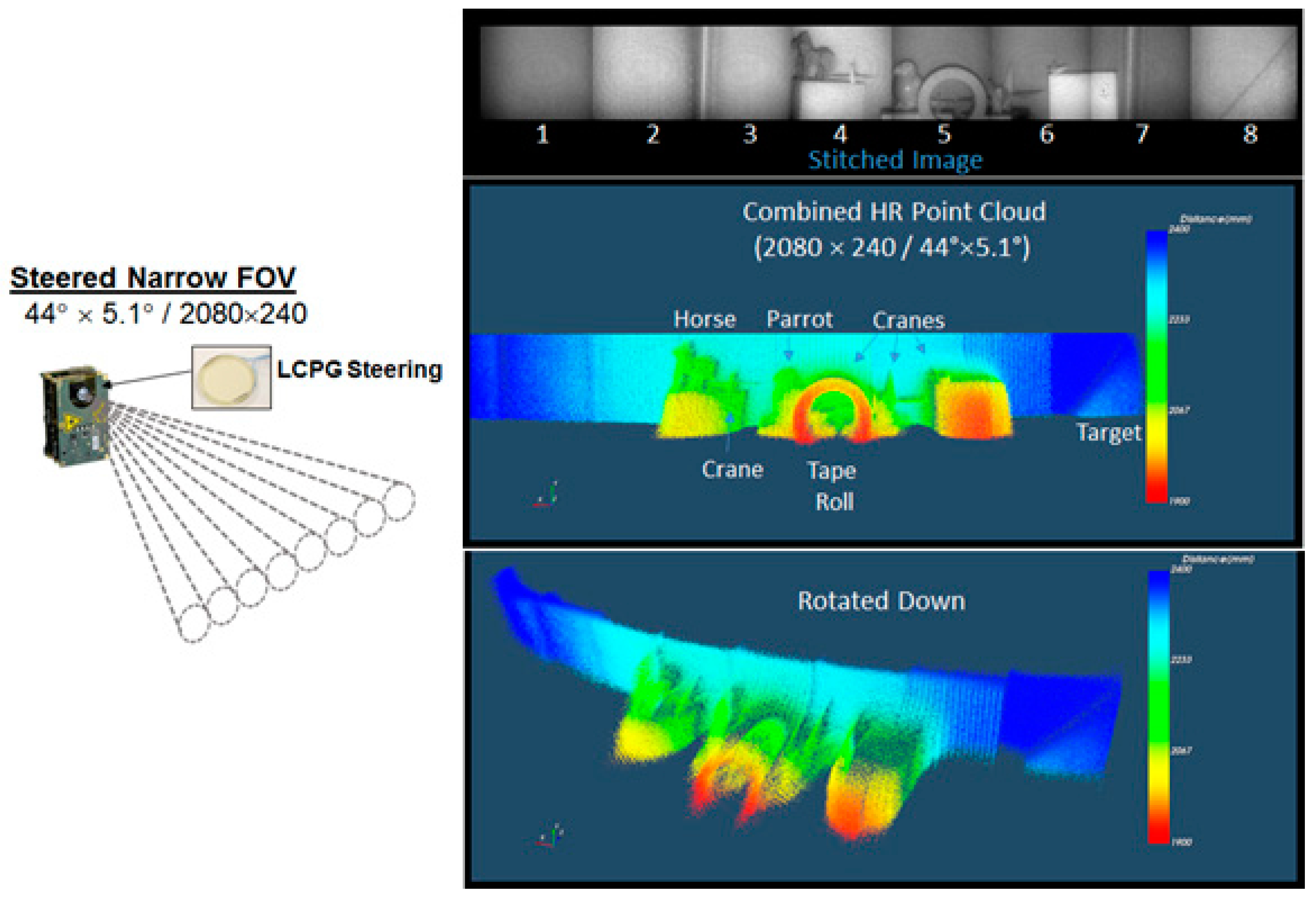
3.1. Tiling Fields of View in Time-of-Flight and Flash Lidar Sensors
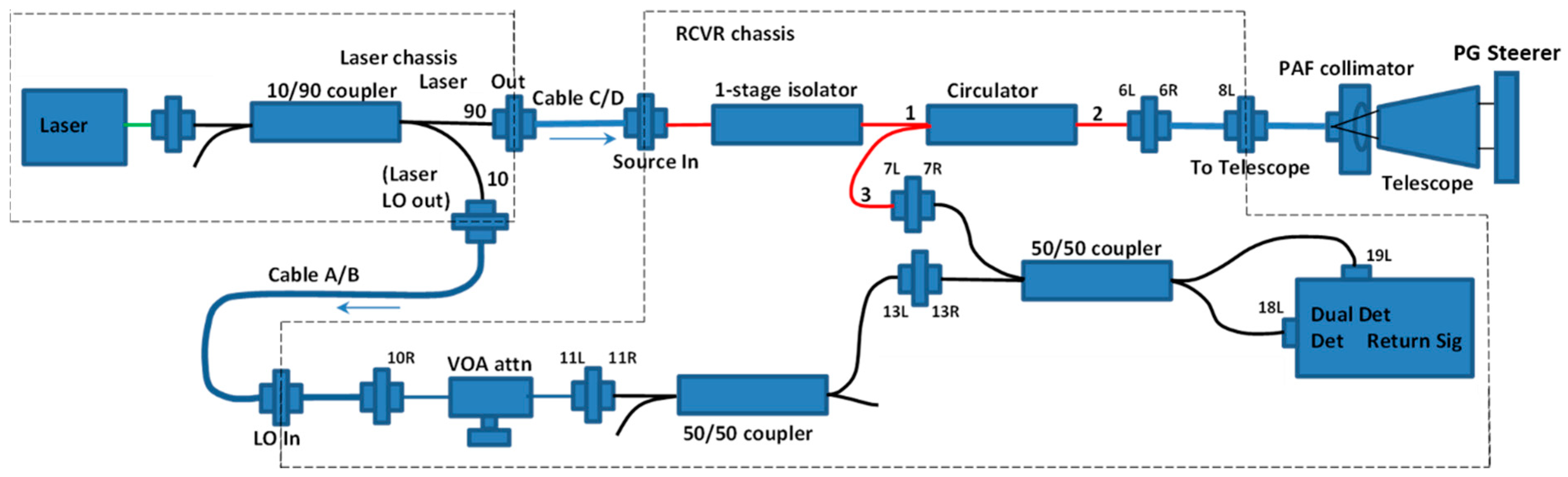
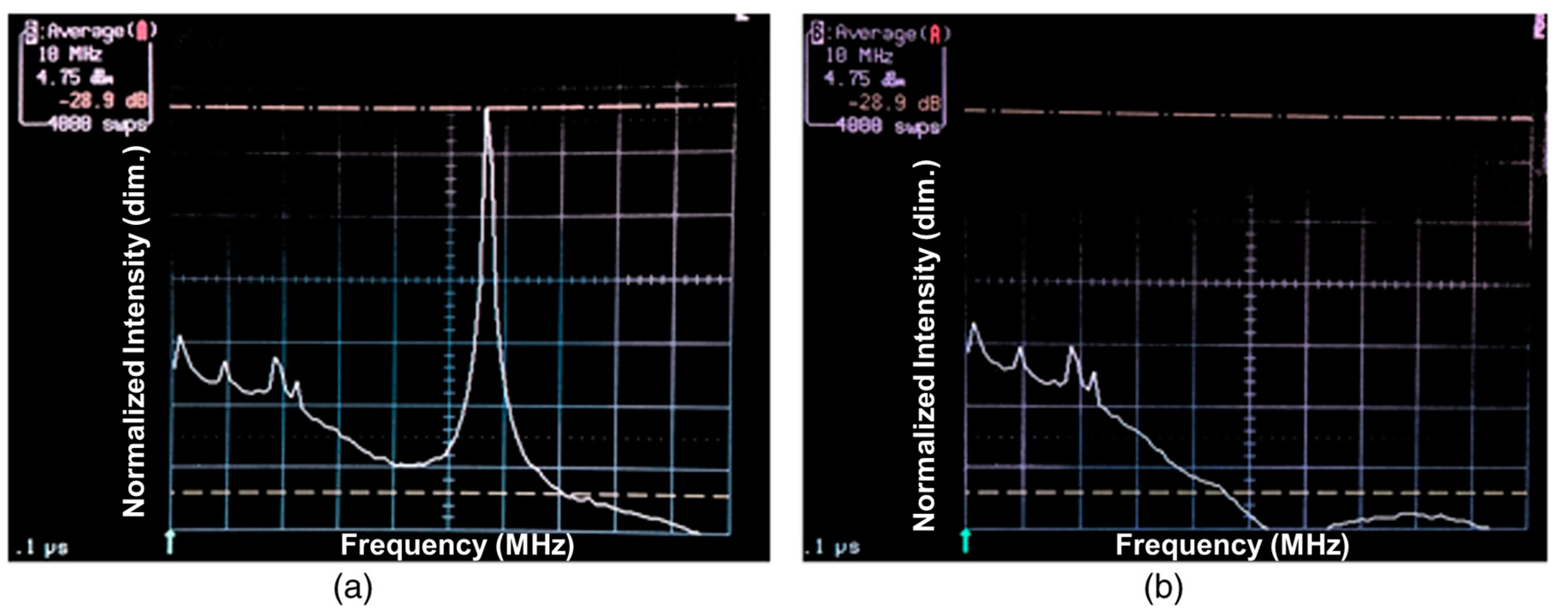
3.2. Steering of Monostatic Coherent Doppler Lidar for Wind Sensing
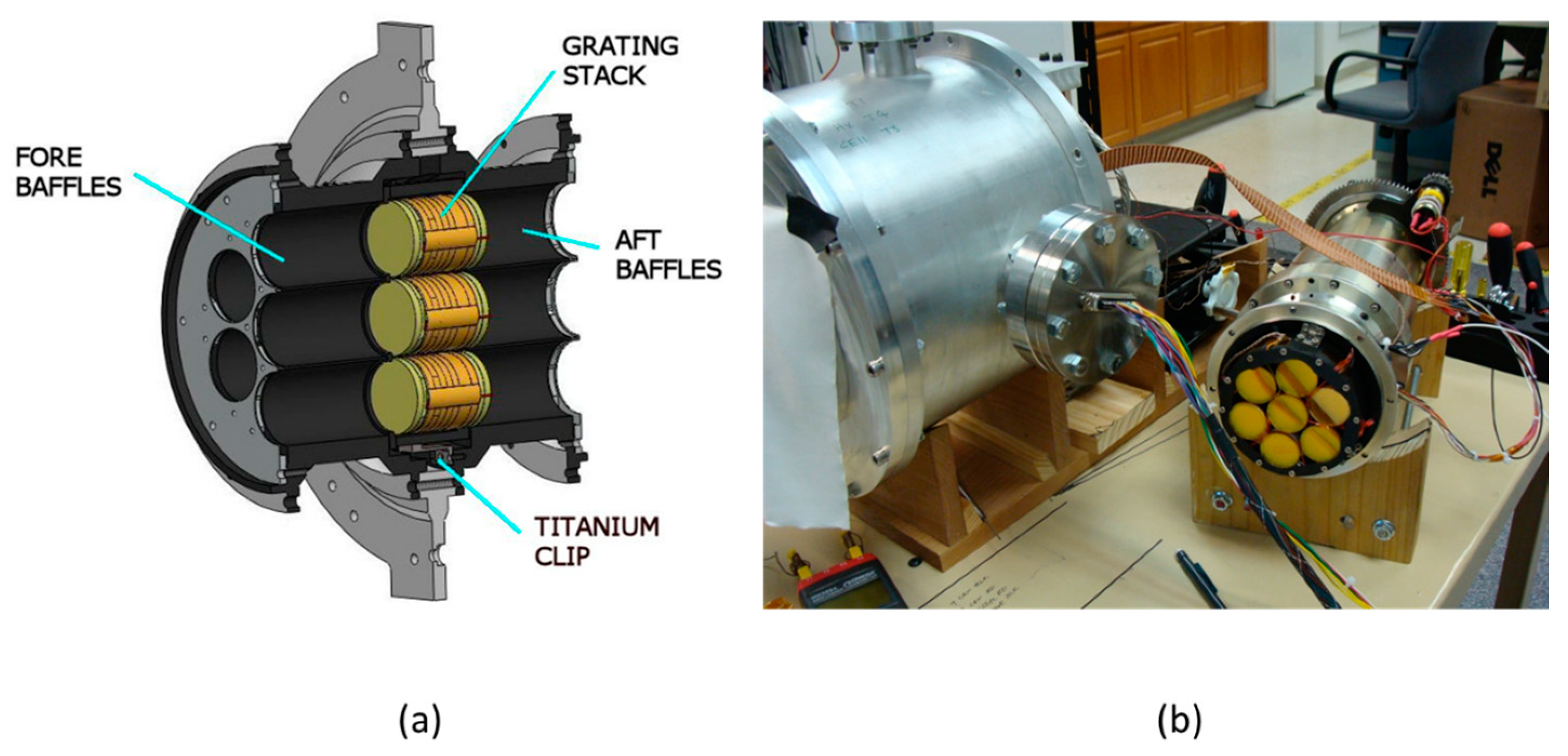
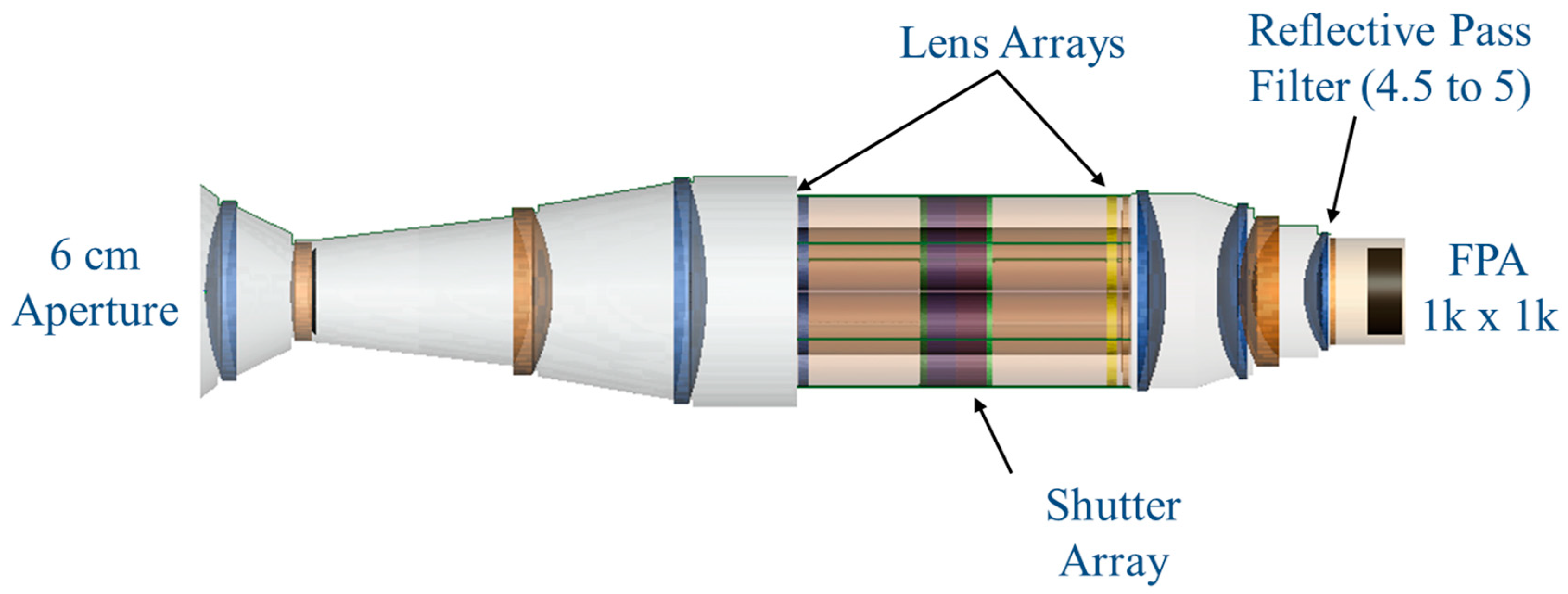
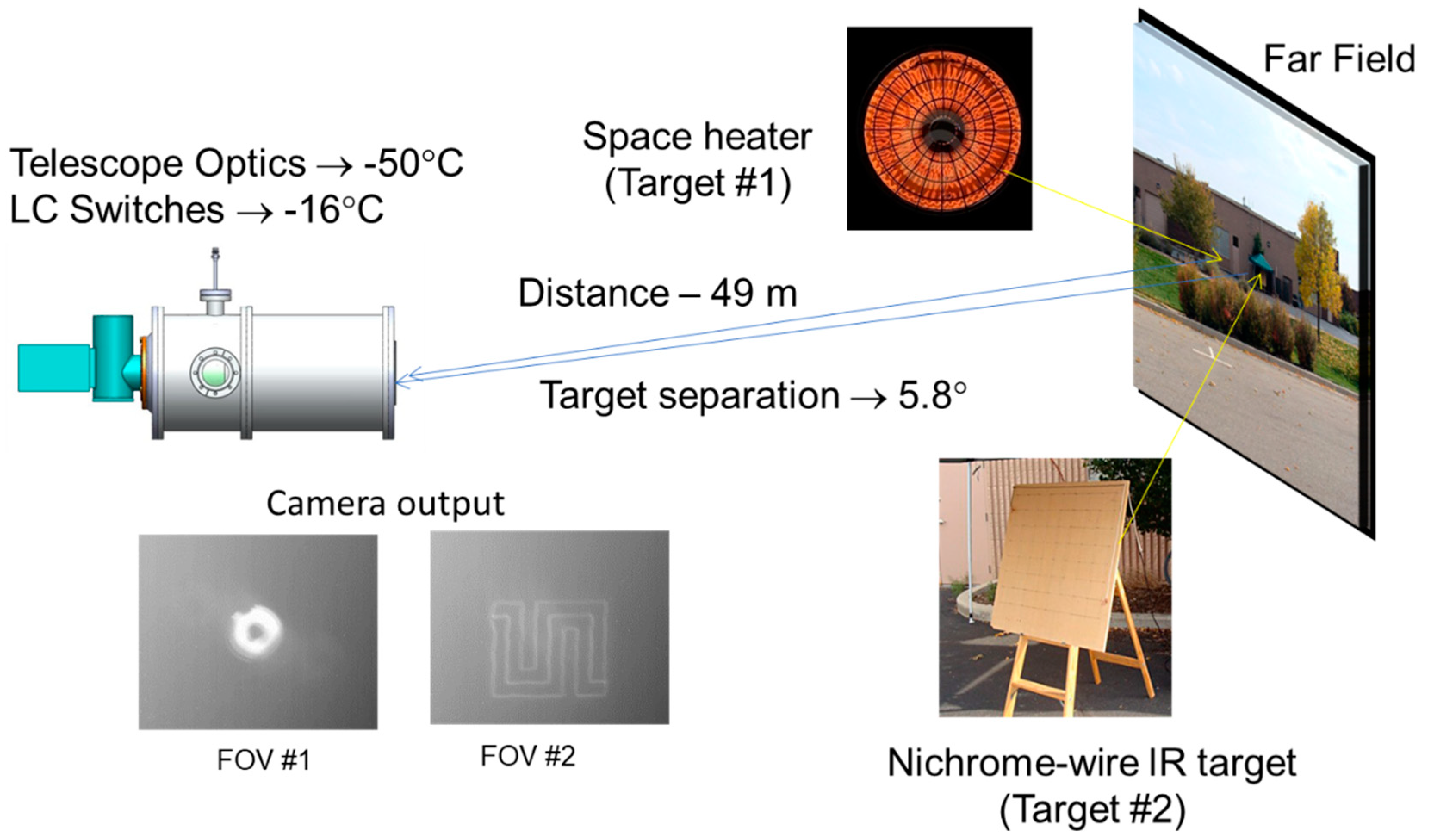
3.3. Broadband Polarization-Insensitive Passive Imaging
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- McManamon Paul, F.; Bos Philip, J.; Escuti Michael, J.; Heikenfeld, J.; Serati, S.; Xie, H.; Watson Edward, A. A Review of Phased Array Steering for Narrow-Band Electrooptical Systems. Proc. IEEE 2009, 97, 1078–1096. [Google Scholar] [CrossRef]
- McManamon, P.F.; Ataei, A. Progress and opportunities in the development of nonmechanical beam steering for electro-optical systems. Opt. Eng. 2019, 58, 120901. [Google Scholar] [CrossRef]
- Smith, I.W.; Holz, M.K.O. Wide-Angle Beam Steering System. U.S. Patent 7,215,472, 8 May 2007. [Google Scholar]
- Chen, P.; Jin, Y.; He, D.; Chen, J.; Xu, J.; Zhao, J.; Zhang, Y.; Kong, F.; He, H.; Shao, J. Design and fabrication of multiplexed volume Bragg gratings as angle amplifiers in high power beam scanning system. Opt. Express 2018, 26, 25336–25346. [Google Scholar] [CrossRef] [PubMed]
- He, Z.; Gou, F.; Chen, R.; Yin, K.; Zhan, T.; Wu, S.-T. Liquid Crystal Beam Steering Devices: Principles, Recent Advances, and Future Developments. Crystals 2019, 9, 292. [Google Scholar] [CrossRef]
- Wang, X.; Wilson, D.; Muller, R.; Maker, P.; Psaltis, D. Liquid-crystal blazed-grating beam deflector. Appl. Opt. 2000, 39, 6545–6555. [Google Scholar] [CrossRef] [PubMed]
- Gori, F. Measuring Stokes parameters by means of a polarization grating. Opt. Lett. 1999, 24, 584–586. [Google Scholar] [CrossRef]
- Bomzon, Z.; Biener, G.; Kleiner, V.; Hasman, E. Space-variant Pancharatnam–Berry phase optical elements with computer-generated subwavelength gratings. Opt. Lett. 2002, 27, 1141–1143. [Google Scholar] [CrossRef]
- Escuti, M.J.; Jones, W.M. 39.4: Polarization-Independent Switching with High Contrast from a Liquid Crystal Polarization Grating. SID Symp. Dig. Tech. Pap. 2006, 37, 1443–1446. [Google Scholar] [CrossRef]
- Kim, J.; Oh, C.; Escuti, M.J.; Hosting, L.; Serati, S. Wide-angle nonmechanical beam steering using thin liquid crystal polarization gratings. In Advanced Wavefront Control: Methods, Devices, and Applications VI; International Society for Optics and Photonics: lingham, WA, USA, 2008; Volume 7093, pp. 709302–709312. [Google Scholar] [CrossRef]
- Nersisyan, S.R.; Tabiryan, N.V.; Steeves, D.M.; Kimball, B.R. The principles of laser beam control with polarization gratings introduced as diffractive waveplates. In Liquid Crystals XIV; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7775, p. 77750U. [Google Scholar] [CrossRef]
- Kim, J.; Oh, C.; Serati, S.; Escuti, M.J. Wide-angle, nonmechanical beam steering with high throughput utilizing polarization gratings. Appl. Opt. 2011, 50, 2636–2639. [Google Scholar] [CrossRef]
- Kim, J.; Miskiewicz, M.N.; Serati, S.; Escuti, M.J. Nonmechanical Laser Beam Steering Based on Polymer Polarization Gratings: Design Optimization and Demonstration. J. Lightwave Technol. 2015, 33, 2068–2077. [Google Scholar] [CrossRef]
- Oh, C.; Escuti, M.J. Numerical analysis of polarization gratings using the finite-difference time-domain method. Phys. Rev. A 2007, 76, 043815. [Google Scholar] [CrossRef]
- Divliansky, I. Volume Bragg Gratings: Fundamentals and Applications in Laser Beam Combining and Beam Phase Transformations. Hologr. Mater. Opt. Syst. 2017. [Google Scholar] [CrossRef]
- Oh, C.; Escuti, M.J. Time-domain analysis of periodic anisotropic media at oblique incidence: An efficient FDTD implementation. Opt. Express 2006, 14, 11870–11884. [Google Scholar] [CrossRef]
- Chen, H.; Weng, Y.; Xu, D.; Tabiryan, N.V.; Wu, S.-T. Beam steering for virtual/augmented reality displays with a cycloidal diffractive waveplate. Opt. Express 2016, 24, 7287–7298. [Google Scholar] [CrossRef] [PubMed]
- Weng, Y.; Xu, D.; Zhang, Y.; Li, X.; Wu, S.-T. Polarization volume grating with high efficiency and large diffraction angle. Opt. Express 2016, 24, 17746–17759. [Google Scholar] [CrossRef] [PubMed]
- Xiang, X.; Kim, J.; Escuti, M.J. Bragg polarization gratings for wide angular bandwidth and high efficiency at steep deflection angles. Sci. Rep. 2018, 8. [Google Scholar] [CrossRef]
- Gao, K.; McGinty, C.; Payson, H.; Berry, S.; Vornehm, J.; Finnemeyer, V.; Roberts, B.; Bos, P. High-efficiency large-angle Pancharatnam phase deflector based on dual-twist design. Opt. Express 2017, 25, 6283–6293. [Google Scholar] [CrossRef]
- Serati, S.; Hoy, C.L.; Hosting, L.; Kluttz, K.; Stockley, J.; Hale, C. Large-aperture, wide-angle nonmechanical beam steering using polarization gratings. Opt. Eng. 2016, 56, 031211. [Google Scholar] [CrossRef]
- Sarkissian, H.; Serak, S.V.; Tabiryan, N.V.; Glebov, L.B.; Rotar, V.; Zeldovich, B.Y. Polarization-controlled switching between diffraction orders in transverse-periodically aligned nematic liquid crystals. Opt. Lett. 2006, 31, 2248–2250. [Google Scholar] [CrossRef]
- Cheng, H.-H.; Bhowmik, A.; Bos, P.J. 51.2: Large Angle Image Steering Using a Liquid Crystal Device. SID Symp. Dig. Tech. Pap. 2014, 45, 739–742. [Google Scholar] [CrossRef]
- Escuti, M.J.; Kim, J.; Oh, C.; Serati, S. Beam Steering Devices Including Stacked Liquid Crystal Polarization Gratings and Related Methods of Operation. U.S. Patent 8,982,313 B2, 17 March 2015. [Google Scholar]
- Crawford, G.P.; Eakin, J.N.; Radcliffe, M.D.; Callan-Jones, A.; Pelcovits, R.A. Liquid-crystal diffraction gratings using polarization holography alignment techniques. J. Appl. Phys. 2005, 98, 123102. [Google Scholar] [CrossRef]
- Nersisyan, S.R.; Tabiryan, N.V.; Steeves, D.M.; Kimball, B.R. Characterization of optically imprinted polarization gratings. Appl. Opt. 2009, 48, 4062–4067. [Google Scholar] [CrossRef] [PubMed]
- Miskiewicz, M.N.; Escuti, M.J. Direct-writing of complex liquid crystal patterns. Opt. Express 2014, 22, 12691–12706. [Google Scholar] [CrossRef]
- Davis, S.R.; Rommel, S.D.; Johnson, S.; Anderson, M.H.; Yu, A.W. Liquid crystal clad waveguide laser scanner and waveguide amplifier for LADAR and sensing applications. In Integrated Optics: Devices, Materials, and Technologies XIX; International Society for Optics and Photonics: Bellingham, WA, USA, 2015; Volume 9365, p. 93650N. [Google Scholar] [CrossRef]
- Shi, L.; McManamon, P.F.; Bos, P.J. Liquid crystal optical phase plate with a variable in-plane gradient. J. Appl. Phys. 2008, 104, 033109. [Google Scholar] [CrossRef]
- Yousefzadeh, C.; van Rynbach, A.; Bryant, D.; Bos, P. High-efficiency, tunable, fringe-field switching-mode beam steering based on a liquid crystal Pancharatnam phase. Appl Opt. 2020, 59, 10706–10718. [Google Scholar] [CrossRef] [PubMed]
- Yin, K.; Lee, Y.-H.; He, Z.; Wu, S.-T. Stretchable, flexible, rollable, and adherable polarization volume grating film. Opt. Express 2019, 27, 5814–5823. [Google Scholar] [CrossRef] [PubMed]
- Provenzano, C.; Pagliusi, P.; Cipparrone, G. Highly efficient liquid crystal based diffraction grating induced by polarization holograms at the aligning surfaces. Appl. Phys. Lett. 2006, 89, 121105. [Google Scholar] [CrossRef]
- Nieborek, M.; Rutkowska, K.; Woliński, T.R.; Bartosewicz, B.; Jankiewicz, B.; Szmigiel, D.; Kozanecka-Szmigiel, A. Tunable Polarization Gratings Based on Nematic Liquid Crystal Mixtures Photoaligned with Azo Polymer-Coated Substrates. Crystals 2020, 10, 768. [Google Scholar] [CrossRef]
- Lu, J.; Deshpande, S.; Gulari, E.; Kanicki, J.; Warren, W. Ultraviolet light induced changes in polyimide liquid-crystal alignment films. J. Appl. Phys. 1996, 80. [Google Scholar] [CrossRef]
- Lin, P.-T.; Wu, S.-T.; Chang, C.-Y.; Hsu, C.-S. UV Stability of High Birefirngence Liquid Crystals. Mol. Cryst. Liquid Cryst. 2004, 411, 243–253. [Google Scholar] [CrossRef]
- Deangelis, A.; Rougier, A.; Manaud, J.-P.; Labrugère, C.; Miller, E.; Gaillard, N. Temperature-resistant high-infrared transmittance indium molybdenum oxide thin films as an intermediate window layer for multi-junction photovoltaics. Solar Energy Mater. Solar Cells 2014, 127, 174–178. [Google Scholar] [CrossRef]
- Wu, S.-T. Infrared properties of nematic liquid crystals: An overview. Opt. Eng. 1987, 26, 120–128. [Google Scholar] [CrossRef]
- Peng, F.; Lee, Y.H.; Chen, H.; Li, Z.; Bostwick, A.E.; Twieg, R.J.; Wu, S.T. Low absorption chlorinated liquid crystals for infrared applications. Opt. Mater. Express 2015, 5, 1281–1288. [Google Scholar] [CrossRef]
- Gou, F.; Peng, F.; Ru, Q.; Lee, Y.H.; Chen, H.; He, Z.; Zhan, T.; Vodopyanov, K.L.; Wu, S.T. Mid-wave infrared beam steering based on high-efficiency liquid crystal diffractive waveplates. Opt. Express 2017, 25, 22404–22410. [Google Scholar] [CrossRef]
- Oh, C.; Escuti, M.J. Achromatic diffraction from polarization gratings with high efficiency. Opt. Lett. 2008, 33, 2287–2289. [Google Scholar] [CrossRef] [PubMed]
- Miroslaw, O.; Harford, S.; Doughty, N.; Hoffman, C.; Sanchez, M.; Gutow, D.; Pierce, R. Risley prism beam pointer. In Free-Space Laser Communications VI; International Society for Optics and Photonics: Bellingham, WA, USA, 2006; Volume 6304, p. 630406. [Google Scholar] [CrossRef]
- Skolnik, M.I. Introduction to Radar Systems; McGraw-Hill: New York, NY, USA, 1962. [Google Scholar]
- Dąbrowski, R.; Dziaduszek, J.; Ziółek, A. Low viscosity, high birefringence liquid crystalline compounds and mixtures. Opto-Electron. Rev. 2007, 15, 47–51. [Google Scholar] [CrossRef]
- Gauza, S.; Zhu, X.; Piecek, W.; Dabrowski, R.; Wu, S. Fast Switching Liquid Crystals for Color-Sequential LCDs. J. Display Technol. 2007, 3, 250–252. [Google Scholar] [CrossRef]
- Wu, S.; Wu, C. High-speed liquid-crystal modulators using transient nematic effect. J. Appl. Phys. 1989, 65, 527–532. [Google Scholar] [CrossRef]
- Bos, P.J.; Koehler, K.R. The pi-Cell: A Fast Liquid-Crystal Optical-Switching Device. Mol. Cryst. Liquid Cryst. 1984, 113, 329–339. [Google Scholar] [CrossRef]
- Escuti, M.J.; Bowley, C.C.; Crawford, G.P.; Žumer, S. Enhanced dynamic response of the in-plane switching liquid crystal display mode through polymer stabilization. Appl. Phys. Lett. 1999, 75, 3264–3266. [Google Scholar] [CrossRef]
- Fan, Y.-H.; Lin, Y.-H.; Ren, H.; Gauza, S.; Wu, S.-T. Fast-response and scattering-free polymer network liquid crystals for infrared light modulators. Appl. Phys. Lett. 2004, 84, 1233–1235. [Google Scholar] [CrossRef]
- Wu, Y.H.; Lin, Y.H.; Lu, Y.Q.; Ren, H.; Fan, Y.H.; Wu, J.R.; Wu, S.T. Submillisecond response variable optical attenuator based on sheared polymer network liquid crystal. Opt. Express 2004, 12, 6382–6389. [Google Scholar] [CrossRef]
- Love, G.D.; Bhandari, R. Optical properties of a QHQ ferroelectric liquid crystal phase modulator. Opt. Commun. 1994, 110, 475–478. [Google Scholar] [CrossRef]
- Guo, Q.; Xu, L.; Sun, J.; Yang, X.; Liu, H.; Yan, K.; Zhao, H.; Chigrinov, V.G.; Kwok, H.S. Fast switching beam steering based on ferroelectric liquid crystal phase shutter and polarisation grating. Liquid Cryst. 2019, 46, 1383–1388. [Google Scholar] [CrossRef]
- Lapanik, V.; Bezborodov, V.; Timofeev, S.; Haase, W. Shock-free ferroelectric liquid crystal displays with high optical contrast. Appl. Phys. Lett. 2010, 97, 251913. [Google Scholar] [CrossRef]
- Komanduri, R.K.; Lawler, K.F.; Escuti, M.J. A high throughput liquid crystal light shutter for unpolarized light using polymer polarization gratings. In Acquisition, Tracking, Pointing, and Laser Systems Technologies XXV; International Society for Optics and Photonics: Bellingham, WA, USA, 2011; Volume 8052, p. 80520R. [Google Scholar] [CrossRef]
- DeBoo, B.J.; Sasian, J.M.; Chipman, R.A. Depolarization of diffusely reflecting man-made objects. Appl. Opt. 2005, 44, 5434–5445. [Google Scholar] [CrossRef] [PubMed]
- Tan, S.; Stoker, J. Multiwavelength Polarimetric Lidar for Foliage Obscured Man-Made Target Detection. Adv. Geosci. Remote Sens. 2009. [Google Scholar] [CrossRef]
- Stabo-Eeg, F.; Letalick, D.; Steinvall, O.; Lindgren, M. Discriminating land mines from natural backgrounds by depolarization. In Electro.-Optical Remote Sensing, Photonic Technologies, and Applications II; International Society for Optics and Photonics: Bellingham, WA, USA, 2008; Volume 7114, p. 71140H. [Google Scholar] [CrossRef]
- Yan, L.; Wu, T.; Wang, X. Polarization Remote Sensing for Land Observation. In Understanding of Atmospheric Systems with Efficient Numerical Methods for Observation and Prediction; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef]
- McManamon, P.F.; Banks, P.; Beck, J.; Fried, D.G.; Huntington, A.S.; Watson, E.A. Comparison of flash lidar detector options. Opt. Eng. 2017, 56, 031223. [Google Scholar] [CrossRef]
- Hill, C. Coherent Focused Lidars for Doppler Sensing of Aerosols and Wind. Remote Sens. 2018, 10, 466. [Google Scholar] [CrossRef]
- Rye, B.J. Primary aberration contribution to incoherent backscatter heterodyne lidar returns. Appl Opt. 1982, 21, 839–844. [Google Scholar] [CrossRef]
- Masterson, H.; Serati, R.; Serati, S.; Buck, J. MWIR wide-area step and stare imager. In Acquisition, Tracking, Pointing, and Laser Systems Technologies XXV; International Society for Optics and Photonics: Bellingham, WA, USA, 2011; Volume 8052, p. 80520N. [Google Scholar] [CrossRef]
- Komanduri, R.K.; Lawler, K.F.; Escuti, M.J. Multi-twist retarders: Broadband retardation control using self-aligning reactive liquid crystal layers. Opt. Express 2013, 21, 404–420. [Google Scholar] [CrossRef] [PubMed]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoy, C.; Stockley, J.; Shane, J.; Kluttz, K.; McKnight, D.; Serati, S. Non-Mechanical Beam Steering with Polarization Gratings: A Review. Crystals 2021, 11, 361. https://doi.org/10.3390/cryst11040361
Hoy C, Stockley J, Shane J, Kluttz K, McKnight D, Serati S. Non-Mechanical Beam Steering with Polarization Gratings: A Review. Crystals. 2021; 11(4):361. https://doi.org/10.3390/cryst11040361
Chicago/Turabian StyleHoy, Christopher, Jay Stockley, Janelle Shane, Kelly Kluttz, Douglas McKnight, and Steven Serati. 2021. "Non-Mechanical Beam Steering with Polarization Gratings: A Review" Crystals 11, no. 4: 361. https://doi.org/10.3390/cryst11040361
APA StyleHoy, C., Stockley, J., Shane, J., Kluttz, K., McKnight, D., & Serati, S. (2021). Non-Mechanical Beam Steering with Polarization Gratings: A Review. Crystals, 11(4), 361. https://doi.org/10.3390/cryst11040361