1. Introduction
Evolutionary games were first proposed by biologists to study social behaviors in nature
Smith and Price (
1973) and have been widely applied in natural, social and economic systems in the past few decades (
Fan et al., 2021;
Zhang et al., 2021). Classical evolutionary games often assume that each player interacts with all other players or randomly selected players. However, due to the impact of complex network environments, the ability of each player to obtain information is limited, which is dependent of the local information among players and the network topology. Accordingly, evolutionary games on the network have been proposed and called networked evolutionary games (NEGs)
Nowak and May (
1992). In NEGs, nodes represent players and edges represent the interactions between players. Therefore, nodes and edges play an important role in the study of NEGs. In recent years, the state feedback control, incentive-based control and robustness of NEGs have been well studied (
Jia et al., 2024;
Sun et al., 2023;
Wang et al., 2023;
Ye, 2022) and have become popular problems in biology, sociology, system science and other disciplines (
Fowler & Christakis, 2010;
Iyer & Killingback, 2016).
With the development of logical dynamical systems and finite games, researchers need to adopt effective control methods to optimize the performance of systems and promote the evolution towards the expected goal in practical application scenarios such as biology, sociology and economics. However, traditional methods have difficulties dealing with complex logical relations. The semi-tensor product of matrices
Cheng et al. (
2011) provides an effective way to solve this problem by transforming elements of a finite set into logical vectors and then converting complex logical expressions into simple algebraic state-space representations. Based on this method, a series of important results have been obtained on the observability
Y. Li et al. (
2024), controllability
X. Yang and Li (
2023) and stability
Guo et al. (
2019) of Boolean networks. These studies are helpful to predict the network behavior of gene regulation and optimize the spread of social behavior. Additionally, the semi-tensor product method has been introduced in game theory (
W. Liu et al., 2023;
G. Zhao et al., 2024;
R. Zhu et al., 2022), particularly playing a key role in the study of strategy consensus in NEGs
Jia et al. (
2024).
It is worth pointing out that the network topology of NEGs often consists of a large number of nodes and edges. However, the computational complexity of methods in (
Jia et al., 2024;
W. Liu et al., 2023;
G. Zhao et al., 2024;
R. Zhu et al., 2022) grows exponentially with the increase in number of nodes. As a result, it is necessary to develop some new methods to reduce the complexity of studying NEGs. Some useful techniques were proposed to study large-scale logical networks, including logical matrix factorization
H. Li and Wang (
2015), compositional method
H. Li and Pang (
2024), network aggregation
Y. Zhao et al. (
2013) and pinning control
Zhong et al. (
2021). These methods can effectively reduce the computational complexity and improve the efficiency of network analysis and control, especially for handling complex logical dynamical systems.
In recent years, the network aggregation method has been widely used in the analysis and control of logical networks, such as stabilization
H. Li et al. (
2021), reachability
Y. Zhao et al. (
2016) and observability
Y. Liu et al. (
2020). Particularly, the problem of controlling the strategy choices of players of a large-scale NEG in order to achieve consensus was solved using network aggregation techniques. Based on the strategy profile reachability of each control sub-game, the network aggregation was used to study the large-size networked evolutionary matrix games with a general network structure
H. Li et al. (
2024). The basic idea of network aggregation is to divide a network into several subnetworks and derive the behavior of the whole network by studying the properties of the subnetworks
J. Yang and Cho (
2016). In addition, an important method called pinning control was introduced to study logical networks
Lu et al. (
2016), and several interesting results were obtained (
H. Li & Wang, 2015;
Lin et al., 2022;
S. Zhu et al., 2023,
2022). The main idea of pinning control is to achieve the control objective by controlling only a small subset of nodes
Zhong et al. (
2020), thereby reducing the computational complexity. The strategy consensus of large-scale NEGs was also solved through pinning control, and the strategy consensus problem of NEGs was considered in
Jiang et al. (
2024) via the degree-based pinning control. To our best knowledge, there are no results on combining network aggregation and pinning control to study the strategy consensus of NEGs. Therefore, it is meaningful to combine these two methods for the purpose of reducing both the computational complexity and target players of NEGs.
In this paper, we study the strategy consensus of large-scale NEGs via network aggregation and pinning control. The contributions of this article are mainly summarized below. On one hand, by partitioning the whole network, we give the algebraic form of NEGs with pinning control and obtain a sufficient condition for subnetworks to achieve a strategy consensus. On the other hand, based on the network aggregation, we give a sufficient condition for a strategy consensus of large-scale NEGs by selecting a small number of control players in subnetworks.
The remainder of this paper is organized as follows.
Section 2 gives some preliminaries.
Section 3 presents the algebraic representations of strategy profile dynamics’ equations of the subnetworks via network aggregation.
Section 4 provides the main results of this paper.
Section 5 is a brief conclusion.
At the end of this section, we present some useful notations.
is the set of natural numbers, and is the set of real numbers.
denotes the ith column of matrix A.
.
.
, where is the -dimensional identity matrix.
A logical matrix is simply denoted as .
and denote the sets of -dimensional real matrices and logical matrices, respectively.
2. Preliminaries
In this section, we briefly recall some preliminaries on the semi-tensor product of matrices and the model of NEGs.
The main tool used in this paper is the semi-tensor product of matrices. This is a new multiplication that can be used for matrices with different dimensions. For more details, please refer to
Cheng et al. (
2011).
Definition 1. Let and be given. The semi-tensor product of two matrices X and Y, denoted by , is defined aswhere is the least common multiple of n and p, and ⊗ denotes the Kronecker product. Remark 1. When , the semi-tensor product of matrices X and Y is consistent with the conventional matrix product. In the following text, the symbol ⋉ will be omitted.
The semi-tensor product of matrices has many useful properties, one of which is shown below. Let
be an
n-dimensional pseudo-logical function. Using the semi-tensor product method, there exists a unique matrix
, such that
where
M is called the structural matrix of
f.
In the following, we present some necessary preliminaries on NEGs.
Definition 2. An NEG with n players is composed of the following three elements:
- (i)
An undirected network graph , where represents the set of n players, and represents the set of edges;
- (ii)
A fundamental network game, where denotes the strategy set, denotes the strategy of player i at time t, denotes the strategy profile at time t, and denotes the payoff matrix;
- (iii)
A strategy updating rule (SUR)
Remark 2. represents the set of all neighbors of player i within l steps (including l), and N represents the set of all neighbors of player i within one step. represents the average payoff of player j at time t, expressed as Remark 3. There are several common SURs, such as unconditional imitation, myopic best response adjustment, and the Fermi rule.
Remark 4. According to the SUR in Definition 2, we can derive the fundamental evolutionary equations below:Using the semi-tensor product of matrices, we can obtain the following strategy profile dynamics (SPDs):where . Definition 3. Given an NEG , assume that is a partition of V, where . If the strategies of the players in U can be fixed, then is called a control networked evolutionary game, where is called the state player, and is called the control player.
Definition 4. Given two sets of players and , where , the mapping is defined as Definition 5. If there exists an integer , such that , is satisfied for any integer and any initial strategy profile , then an NEG is said to achieve strategy consensus at .
4. Main Results
Firstly, we establish a criterion for achieving the strategy consensus in subnetworked evolutionary games and present a control design procedure based on this criterion.
In order to facilitate the analysis, we need to give some basic assumptions. Let the target strategy profile of an NEG with n players be . Then, define the target strategy profile of the ith subnetwork as , the target strategy profile of the input players as , and the target strategy profile of the output players as .
In the SPDs (
5) of subnetworked evolutionary game
, we fix the strategies of input and output players in
as the target strategy
. Then, (
5) can be written as
where
,
and
. Thus, we have
Since
, we derive that
Then, we have the following result.
Theorem 1. Let be the set of input and output control players of . Then, the subnetworked evolutionary game achieves strategy consensus to , if and only ifwhere . Proof. (Necessity) Suppose that the subnetworked evolutionary game achieves the strategy consensus to . By Definition 5, there exists such that is satisfied for any integer and any initial strategy profile , that is, holds for any .
Since
is the set of input and output players of
, we can derive that
is satisfied for any
and any
. Then, according to (
6) and (
8), we obtain that
holds for any integer
and any
. Based on
and the arbitrariness of
, we have
Next, we prove that there exists a positive integer
satisfying (
9). Let
be the smallest positive integer satisfying (
9), and assume that
. Then, there must exist a
such that
,
and
.
When the strategy of the input and output players of
are fixed to the target strategy
, there exists
such that
. Then, the trajectory of
from
constitutes a cycle, which has the form of
. This contradicts the definition of a strategy consensus. Thus, (
7) is satisfied.
(Sufficiency) Assume that (
7) is satisfied. Then, we have
Based on (
6), for any integer
and any
, we obtain
Then, according to (
10), we derive that
Thus, for any initial state
and any integer
, it holds that
. Notice that
is the set of input and output control players, that is, for any
, we have
,
. Then, we obtain
,
. Hence, we conclude that
achieves the strategy consensus to
. □
From Theorem 1, if (
7) holds, then the control players set
of
is the set of input and output players, that is,
. If (
7) does not hold, we need to add the control players of
by fixing the strategy of
as
and
is called the control player with the largest degree. Therefore, (
6) can be written as
where
. Then, we have
. According to
, we obtain
where
.
In the following, we continue to verify whether
holds, where
. Denote
as the set of input and output players of
, that is,
, and define
as the set of control players with the largest degree. If (
12) holds, then we derive that
. Otherwise, we control several players with larger degrees at the same time, in which we control the first
players belonging to the set
, where
, fixing their strategies to
. Similarly, we can obtain
where
. Then, we have
. According to
, we obtain that
where
.
When
, we need to consider whether
holds, respectively, where
=
. Denote the minimum value of
that makes (
14) hold as
, that is,
. Thus, the control players set of
is
such that
achieves the strategy consensus to
.
Based on the above analysis, we present Algorithm 1 that briefly summarizes how to design the set of control players for
.
| Algorithm 1 Calculate the set of control players for |
| Input: , , |
| Output: |
| |
| if
then |
| |
| else |
| for do |
| |
| if then |
| |
| end if |
| end for |
| end if |
In what follows, based on the control design procedure for achieving strategy consensus of subnetworked evolutionary games, we give a sufficient condition for achieving the strategy consensus of large-scale NEGs.
Denote , where is the set of control players of derived from the above algorithm. Then, a sufficient condition is given below for the strategy consensus of large-scale NEGs.
Theorem 2. An NEG achieves strategy consensus to if the strategies of all players in the set C are fixed to .
Proof. Consider any initial state
of
. If the strategies of the players in the set
are fixed to
, then, based on Theorem 1 and Definition 5, it follows that
will achieve strategy consensus to
at time
. Let
. Define
as the
-step strategy trajectory of
and
as the ordered set of states corresponding to
, where
,
. Since the strategies of all players in the set
C are fixed to
, for each
, the corresponding input sequence
is fixed. Then, we obtain that
is satisfied for any
,
, that is, there exists a corresponding
-matching input sequence
such that for any
and any initial state
, we have
. Hence, we derive the
-step strategy trajectory
, where
,
. In other words,
can reach
at the
th step. Then, for any
, we have
,
. Thus,
holds for any integer
. Therefore, the NEG reaches the strategy consensus to
. □
Remark 5. By the above algorithm, we can calculate the set of control players for each . Therefore, we obtain that the set of control players for the large-scale network is .
Remark 6. Different partitions of a network will result in different subnetworks, and the final set of control players C may also be different.
Finally, we use two examples to illustrate Theorem 2.
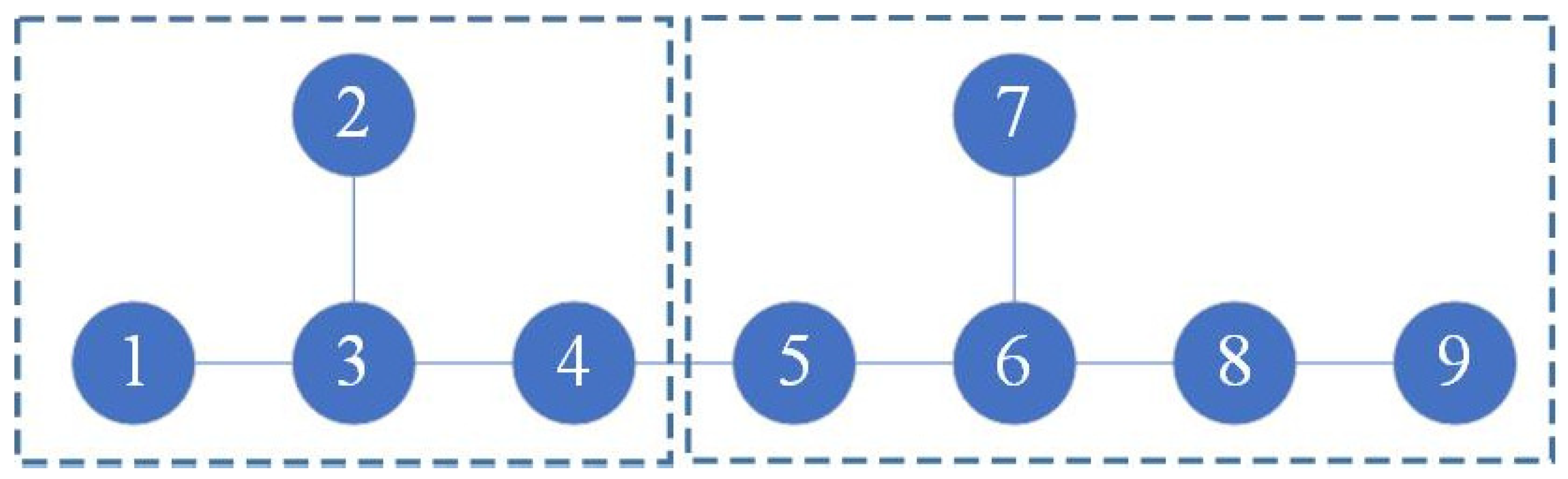
Example 1. Consider an NEG whose network graph is shown in Figure 1. Select control players to guarantee that the considered NEG achieves strategy consensus to , where the strategy set , the payoff matrix , and the SUR is an unconditional imitation with fixed priority (Cheng et al., 2015). As shown in
Figure 1, we divide the whole network into two subnetworks
and
. For subnetwork
, we have
Fixing the strategy of the players in the set
to be
, the SPDs of
are obtained as
where
,
and
. Thus, we have
where
.
According to the unconditional imitation with fixed priority, the average payoffs of players 1, 2, 3 and the strategy update dynamics of player 1 and player 2 in subnetwork
are obtained, as shown in
Table 1.
By a simple calculation, we have
. Since
we derive that
achieves strategy consensus to
at
, and the set of control players of
is
.
Similarly, for subnetwork
, we have
Fixing the strategy of the players in the set
to be
, the SPDs of
are obtained as
where
and
. Thus, we have
. Since
and
, we need to control
such that
holds for any
. Then, we obtain
where
. By a simple calculation, we have
.
It is verified that holds, and thus achieves strategy consensus to at . Moreover, the set of control players of is .
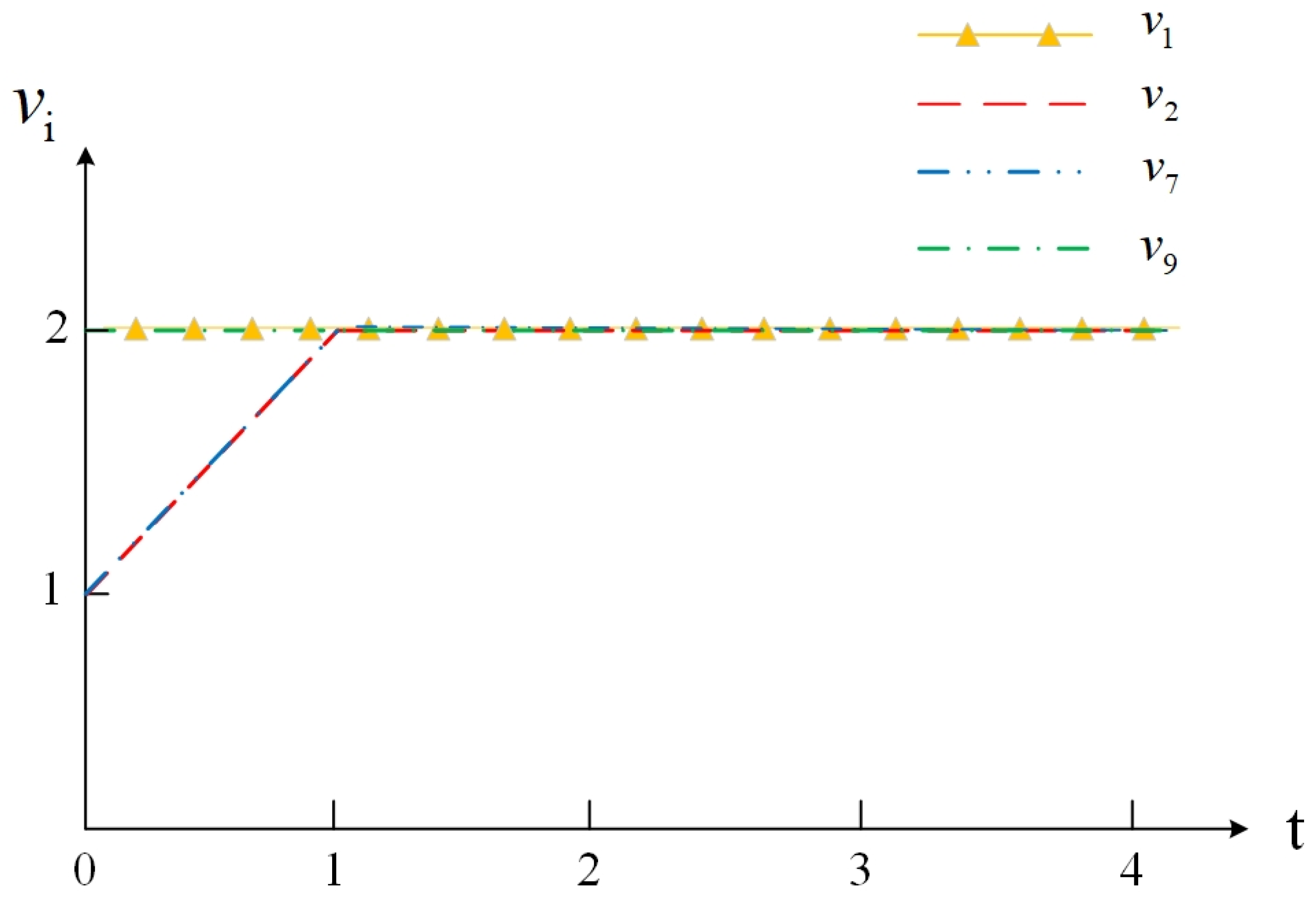
Therefore, the set of control players for the whole network is
. Controlling the players in
C with a fixed strategy
allows the above NEG to achieve strategy consensus to
at
(see
Figure 2).
Remark 7. When we define the strategy “1” as “non-confession” and the strategy “2” as “confession”, the game of Example 1 can be regarded as a special case of the prisoner’s dilemma.
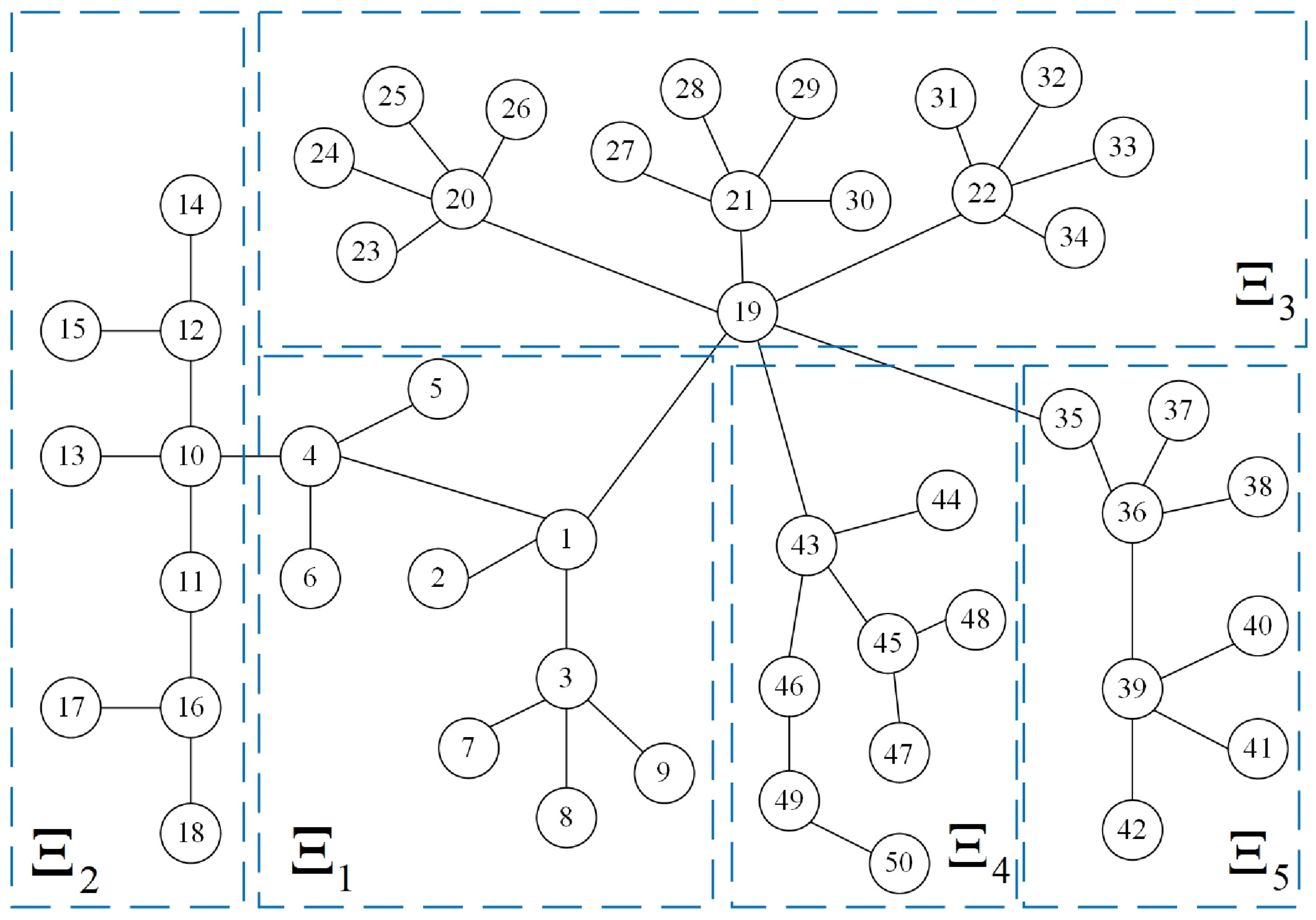
Example 2. Consider an NEG whose network graph is shown in Figure 3. The policy set, payment matrix and SUR are the same as those in Example 1. Select control players to guarantee that the considered NEG achieves strategy consensus to . As shown in
Figure 3, we divide the network into five parts. For subnetwork
, we have
Fixing the strategy of the players in the set
to be
, the SPD of
is obtained as
where
,
and
. Thus, we have
where
. By a simple calculation, we have
. Since
according to Theorem 1, we derive that the set of control players of
is
For
,
, the calculation process is similar to that of
. To avoid redundancy, the detailed calculations are not presented here. Finally, the set of control players for the whole network is





{kind=link}
{kind=link}
{kind=link}