Even with the restriction that they converge to the set of correlated equilibria, there are myriads of approaches to generate heuristic schemes. Such schemes may differ in any number of ways: in terms of the information set accessible to players at each round, or the rationality required of the players, or the autonomy granted to each player, and so on. While heuristic schemes are abstractions themselves, we thus need a further layer of abstraction to generate a single sequence for analyzing convergence. This abstraction, which I call the explicit scheme, has a physically-meaningful interpretation. A very rough metaphor to get a high-level overview of the mapping could be to think of heuristic schemes as similar to mechanisms and explicit schemes as similar to direct mechanisms. Just as direct mechanisms circumscribe the huge space of mechanisms potentially possible, explicit schemes restrict the variety of heuristic schemes and facilitate useful analysis. The characterizations developed later in this section are for probability distribution sequences generated from explicit schemes.
3.1. Explicit Scheme
Consider the following procedure: for every round of the game over the index set , a scheme operator uses a probability distribution over the set of strategy vectors to generate a realization and then recommends to each player i a pure strategy from the set . This provides an interpretation for the definition of an explicit scheme.
Definition 3 (Explicit scheme)
. An explicit scheme is a single sequence of probability distributions,over the set of strategy vectors , where the cardinality of is the same as τ, and . The content of the definition can be elucidated through an example.
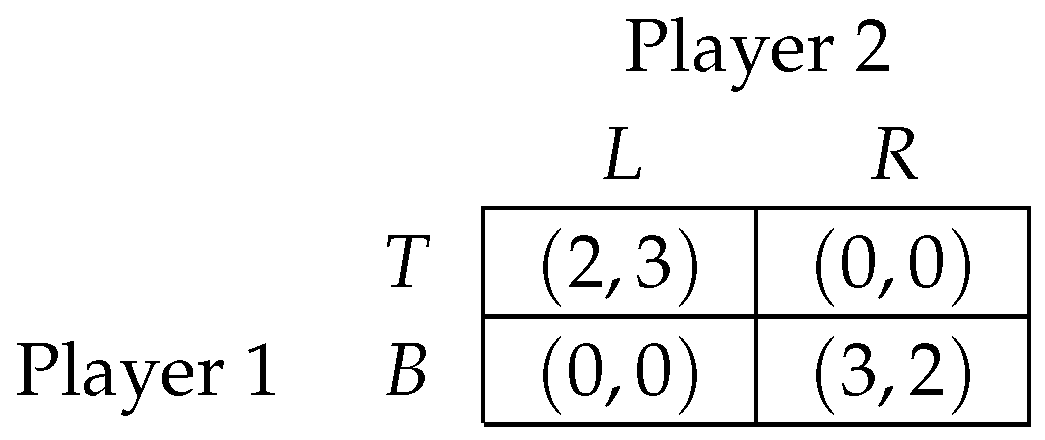
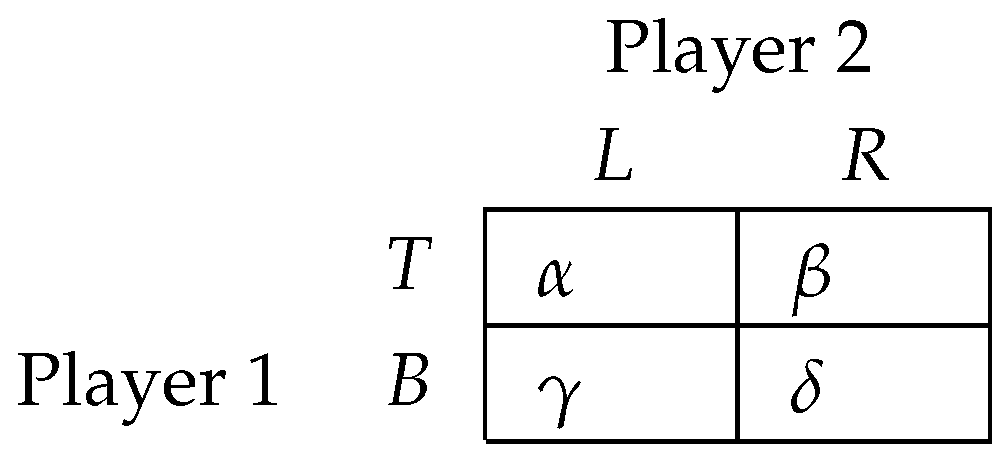
Example 1. Consider the normal form game in Figure 1: An explicit scheme would be a sequence of probability distributions over the set . The probability distribution used by the scheme operator in round t may be represented graphically by Figure 2, with and . If the realization from is, say, the element , the scheme operator recommends pure strategy T to Player 1 and pure strategy L to Player 2 in round t.
A few remarks about explicit schemes are in order at this point:
Remark 1. Explicit schemes, like heuristic schemes, are not tied to any equilibrium concept.
In fact, there is no particular requirement for play from an explicit scheme to even converge to an equilibrium. There are also no rationality restrictions on player actions. Delinking explicit schemes from the notion of equilibrium and rationality allows us to focus on just the sequence of probability distributions.
Remark 2. A scheme operator’s function in an explicit scheme is similar in spirit to an outside observer’s role in a correlated equilibrium.
The difference in the roles arises because there is no rationality requirement imposed on players in the explicit scheme. Further, a scheme operator has to generate a sequence of probability distributions while the outside observer generates a probability distribution just once in a correlated equilibrium.
Explicit schemes are useful because they provide a common substratum for heuristic schemes: any heuristic scheme can be converted to an explicit scheme. Instead of the players randomizing locally—as happens in heuristic schemes—randomization is centralized for explicit schemes.
Proposition 1. For every heuristic scheme, there exists a corresponding explicit scheme.
Proof. The proof is by construction. Recall that a heuristic scheme is a collection of sequences of mixed strategies, one for each player. One may rewrite Condition (
3) as
, where the
are probability distributions over player strategy sets
. An explicit scheme, on the other hand, is a single sequence of probability distributions over the set of strategy vectors. Define the probability distribution
. Since the product
is a probability distribution over
, we get an explicit scheme
.
Since this construction can be undertaken for any heuristic scheme, the proof is complete. □
Example 2. (Continued) In round t of a heuristic scheme, suppose Player 1 uses the probability distribution over , and Player 2 uses the probability distribution over . Then, the explicit scheme corresponding to the heuristic scheme would use over to generate realizations.
One possible interpretation of Proposition 1 could be that in every round, a scheme operator asks each player to reveal the probability distribution that the player would use. The scheme operator then consolidates the player distributions in the manner described above, obtains a realization, and recommends strategies to the players. In this sense, Proposition 1 has a flavor of the revelation principle in mechanism design theory. However, since heuristic schemes are free from notions of equilibrium or rationality, we do not need extra constraints like incentive compatibility or individual rationality. The conversion, as such, is purely mechanical. However, converting a heuristic scheme to its corresponding explicit scheme is very useful because it allows us to extract a single sequence of probability distributions. This allows us to take a fresh look at convergence to equilibrium for heuristics.
3.2. Convergence
To study the convergence properties of heuristic schemes, one way could be to examine the asymptotic behavior of empirical distributions generated from the scheme. The empirical distribution, after
t rounds of play, is simply the relative frequency that each
N tuple
has been played in the first
t rounds
In other words, if the relative frequency of
s is denoted by
, then
is the empirical distribution after
t rounds.
3Definition 4. (Hart and Mas-Colell [5]) A heuristic scheme converges to the set of correlated equilibria if for any , there exists an element T in the index set τ such that for all , one can find a correlated equilibrium distribution at a distance less than ϵ from the empirical distribution. In Definition 4, convergence to the set of correlated equilibria is asymptotic; therefore, one might switch to the theoretical distribution generating the empirical distribution.
Proposition 2. The empirical distribution converges to the set of correlated equilibria in the space of probability distributions over a finite set if the theoretical distributions from which the empirical distributions are generated have converged to the same set.
Note the minor subtlety in the statement of the proposition; for us to assert that the empirical distributions will converge, we must know that the theoretical distributions have already converged. The proof of the proposition is in the
Appendix A and follows from the strong law of large numbers for set valued probability measures.
Explicit schemes provide a convenient route to make the switch from empirical to theoretical distributions. Any heuristic scheme can be converted to a corresponding explicit scheme. Therefore, if one wants to characterize all heuristic schemes that converge to the set of correlated equilibria, one may focus attention on just explicit schemes, without loss of generality. Proposition 2 assures us that if the explicit scheme distributions have converged to the correlated equilibria set, so will the empirical distribution. Consequently, our task is to investigate the properties of the probability distribution sequences generated from explicit schemes that converge to the set of correlated equilibria.
Let C denote the set of correlated equilibria of game and the convex hull of the sequence . Then, the discussion above means that one can re-cast the definition of convergence in the following manner.
Definition 5 (Convergence)
. An explicit scheme converges to the set of correlated equilibria C if for any , there exists a such that: Definition 5 resembles the familiar definition for sequences converging to a limit, the only difference being that the limit is a set instead of a point. Since the set of correlated equilibria is convex, we can rewrite Condition (
4) in the definition as:
Just as convergence of a sequence to a point implies that for any ball centered around the point, one can find a cutoff beyond which all members of the sequence lie in the ball, the definition of convergence to a set implies that for any superset of the given set, one can find a cutoff beyond which the sequence lies completely within the superset. Definition 5 is useful in highlighting important properties of converging heuristic schemes, the focus of the next section.
3.3. Characterizing Heuristic Schemes
Whether a heuristic is adaptive or not is essentially a question about set convergence. However, we have very few tools to probe questions about convergence in sets. On the other hand, there is an abundance of techniques to investigate the properties of sequences that converge to points. The theorems in this section provide the analytical machinery to make the switch from set convergence to point convergence in the case of heuristics. This is one of the important contributions of the paper.
The algebraic and topological concepts used in this section are standard, and the reader is referred to standard texts in analysis (Rudin [
12]) or point-set topology (Steen and Seebach [
13]) for detailed descriptions. For completeness, let me provide brief definitions of a few terms that come up repeatedly. A set
U is called compact if every collection of open sets that covers
U also has a finite subcollection that covers
U. A neighborhood of a point
x is any open set containing
x. A point
y is called an accumulation point of a sequence if every neighborhood of
y contains infinitely many points from the sequence. A set
U is called convex if for any two points
, all points
,
, are also in
U. As noted earlier, the set of correlated equilibria is compact and convex.
4Recall that an explicit scheme generates an infinite sequence of probability distributions over S from a heuristic scheme, and if the heuristic scheme converges to the set of correlated equilibria, this sequence is eventually confined to a compact, convex set. Now, any infinite sequence in a compact set has to accumulate eventually about points in that space. For example, if our set were the first 100 positive integers , an infinite sequence that takes all its values from this set would eventually accumulate at one or more of these integers. This is the content of Theorem 1 below.
Theorem 1. If an explicit scheme converges to the set of correlated equilibria, it has an accumulation point that satisfies the correlated equilibrium Condition (1). Proof. The proof is by contraposition. Denote the set of correlated equilibria by C. Since the explicit scheme converges to this set, from Definition 5, there exists a T such that all points for lie in C. If had no accumulation point in C, then each would have a neighborhood , which would contain at most a finite number of terms of . Now, consider the set of such neighborhoods , . This collection of sets covers C. However, no finite subcollection of , , could cover the sequence , because the product of finites is finite. This in turn implies that no finite subcollection of , , could cover C. However, this contradicts the compactness property of the set of correlated equilibria; thus the result. □
Theorem 1 is a partial step in converting the complicated problem—of convergence to correlated equilibria sets—to a relatively simple question of checking a condition for a point. The condition to be checked is the correlated equilibrium condition in (
1), and the point for which the condition is checked is an accumulation point of the explicit scheme corresponding to the heuristic. Theorem 1 is only a necessary condition, however. Thus, Theorem 1 does not immediately guarantee that finding such a point implies a heuristic scheme converges. For this, we require the next theorem.
Theorem 2. An explicit scheme converges to the set of correlated equilibria if and only if all its accumulation points satisfy the correlated equilibrium Condition (1). Proof. Denote the set of correlated equilibria by C.
(Only if) The proof is by contraposition. Suppose had an accumulation point that did not satisfy the correlated equilibrium condition. In other words, it was not in C. Call this point m. Then, m would have a neighborhood with infinitely many points from , and these points would not lie in C. Any infinite subsequence of would now need to have points in . In particular, for any T, and , a non-empty subset of points in would not lie in C. Thus, would not have converged to C.
(If) Denote the set of accumulation points of by . Let denote a union of neighborhoods of the accumulation points with the property . Since contains all the accumulation points of , one can always find a T such that points lie in for ; thus the result. □
Theorem 2 provides a condition that is both necessary and sufficient for convergence. Taken together, Theorems 1 and 2 say that the explicit scheme corresponding to any heuristic scheme that converges has one or more accumulation points, and all the accumulation points satisfy Condition (
1). Thus, to check for convergence to the set of correlated equilibria, it is enough to just examine a heuristic scheme’s accumulation points.
These theorems represent a significant simplification of the original problem and lead to other interesting characterizations. Recall that the Cauchy criterion on the real line asserts that for convergent sequences, elements of the sequence become arbitrarily close to each other as the sequence progresses. Something broadly similar can be established even for heuristic schemes. Since all the accumulation points of a converging explicit scheme lie in the set of correlated equilibria, the outlines of a compact, convex set may be discerned from the path of such sequences.
Theorem 3. Let denote an explicit scheme that converges to the set of correlated equilibria. Then, for any in , there exists a in , , satisfying the correlated equilibrium Condition (1), such that: Proof. Denote the set of correlated equilibria by C and the set of accumulation points of by A. From Theorem 1, set A is non-empty. Further, from Theorem 2, . Represent a generic accumulation point in A by a. For any given n, denote by the smallest neighborhood of a that contains the sequence .
Now, given the point in the statement of the theorem, choose a point , , such that . Since , such an x always exists. Next, for each accumulation point , choose a point , , that satisfies two conditions: (i) ; (ii) for any such that , . That is, b is the smallest index for which Condition (i) is satisfied. Since a is an accumulation point, such a point always exists.
Finally, choose . Then, by construction, , and ; thus the result. □
In fact, there is a very simple algorithm to obtain a
in Theorem 3 for any given point
: Construct
for an arbitrary
,
. Then, move further along the sequence, and for any
, if
, replace the original convex set by
. Since the sequence converges to the set of correlated equilibria, repeating this process eventually gives us our
. Note, however, that
m in the above theorem is countable, not necessarily finite.
5 Thus, such an exhaustive search algorithm may not be efficient.
The formulation in Theorem 3 is useful because it can give an idea of the pattern into which a heuristic scheme finally settles. Further, in many cases, the more the number of points one has to traverse along the sequence to find a for a given point, the more the distance of the point from the ultimate convergence set. This is helpful in gauging the distance of the current state of play from the ultimate equilibrium when using a heuristic. These notions are examined in more detail in the next section.

{kind=link}
{kind=link}

