Eliminating Nonuniform Smearing and Suppressing the Gibbs Effect on Reconstructed Images †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Mathematical Description of Uniform Rectilinear Smearing of the Image
2.1. Direct Problem
| Algorithm 1. The direct problem of uniform rectilinear smearing of an image. |
Input: exact (undistorted) image w
|
2.2. Inverse Problem
| Algorithm 2. The inverse problem of the uniform rectilinear smearing (the first approach) |
Input: smeared image g(x, y), where x and y are directed horizontally and vertically, respectively.
|
| Algorithm 3. The inverse problem of the uniform rectilinear smearing (the second approach) |
Input: smeared image g(x, y), where x and y are directed horizontally and vertically respectively
|
3. Mathematical Description of the Nonuniform Rectilinear Smearing
3.1. The First (Time) Approach [1,2,6]
3.2. The Second (Spatial) Approach [5,6]
3.2.1. The Direct Problem
3.2.2. The Inverse Problem
| Algorithm 4. The inverse problem for illuminating the row-wise nonuniform rectilinear smear |
| Input: image g(x, y) smeared nonuniformly along x |
| (1) Presentation of a two-dimensional image g(x, y) as a set of one-dimensional images . |
| (2) Determining the nonuniform smear Δ(x) from the spectrum (by the spectral method). |
| (3) Calculating a PSF h(x,ξ) according to (11). |
| (4) Writing matrix A and vectors of a SLAE. |
| (5) Choosing the regularization parameter α in some approach. |
| (6) Solving the regularized SLAE (13) in each y-row. |
| (7) Obtaining the regularized solution according to (14). |
| (8) Forming image wα(x, y) from a set of row-wise solutions . |
| Output: wα(x, y). |
4. Illustrative Example
4.1. Uniform Smearing of Image Using Boundary Conditions
4.2. Uniform Image Smearing with Truncation
4.3. Uniform Image Smearing with Diffusing the Image Edges
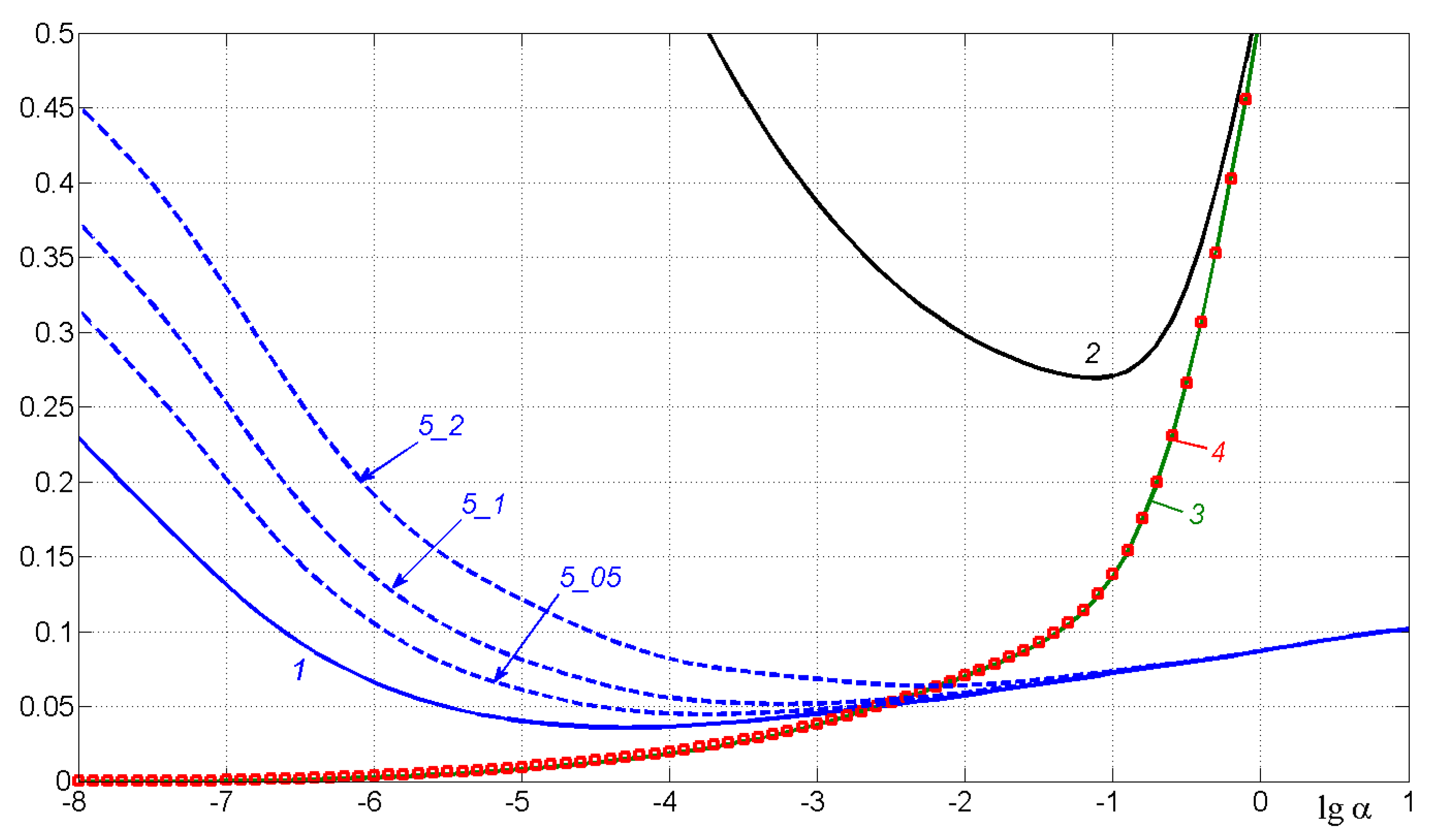
4.4. Error Estimation of Image Restoration
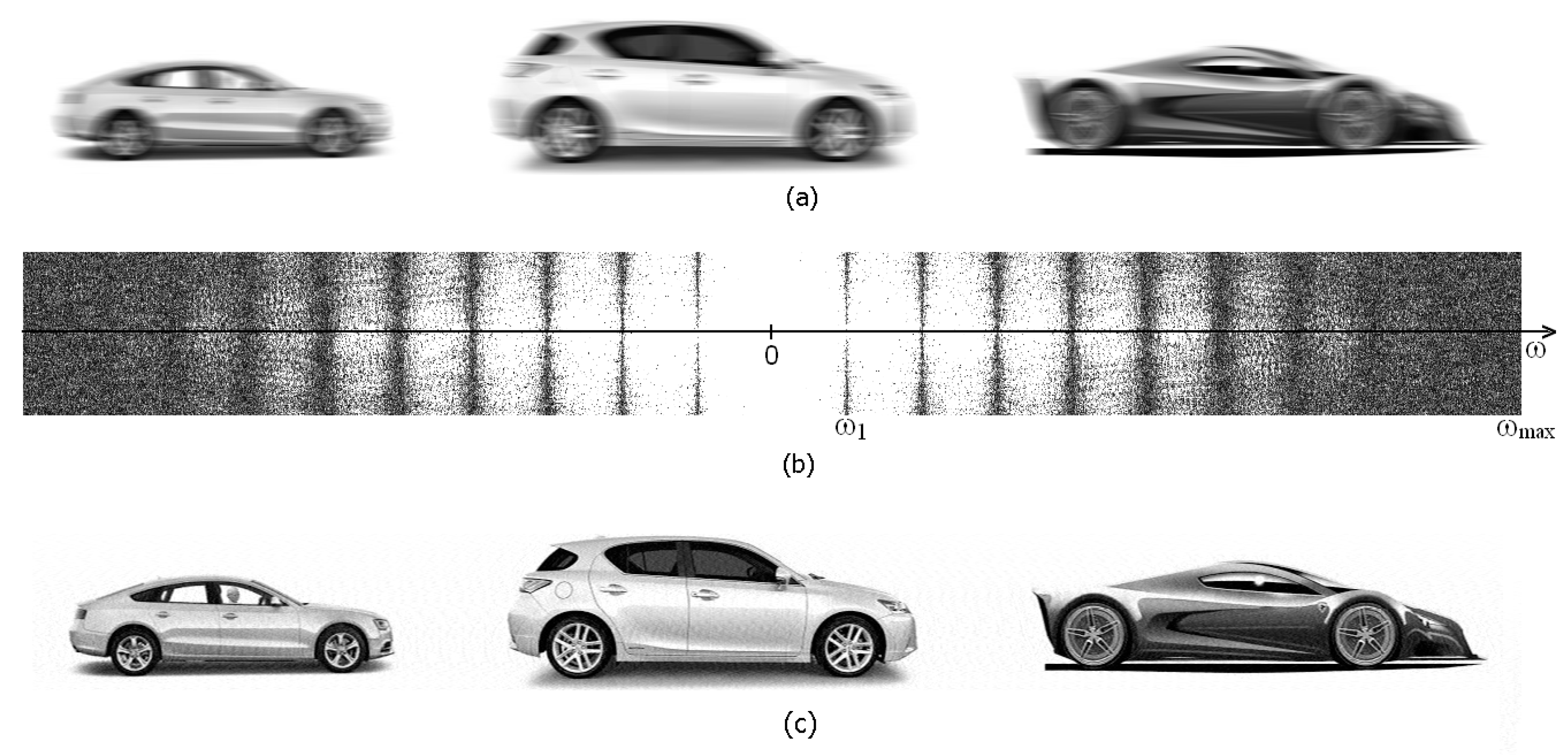
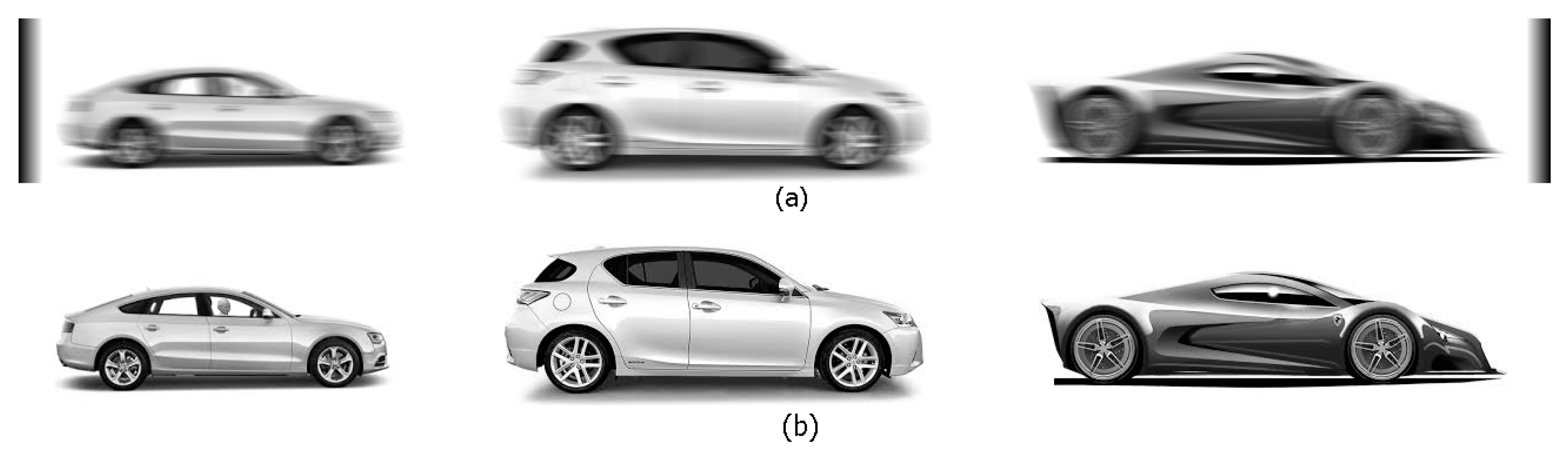
5. Direct and Inverse Problems of Nonuniform Image Smearing
The Approach of Divided Spectra
6. Noise Accounting
| Algorithm 5. Noise eliminating by the modified median filter. |
Input: g – image noisy by bipolar impulse noise
|
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Tikhonov, A.N.; Goncharsky, A.V.; Stepanov, V.V. Inverse Problems of Photoimages Processing. In Ill-Posed Problems in Natural Science; Tikhonov, A.N., Goncharsky, A.V., Eds.; MSU Publ.: Moscow, Russia, 1987; pp. 185–195. [Google Scholar]
- Bakushinsky, A.; Goncharsky, A. Ill-posed Problems: Theory and Applications; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1994; 199p. [Google Scholar] [CrossRef]
- Gruzman, I.S.; Kirichuk, V.S.; Kosykh, V.P.; Peretyagin, G.I.; Spektor, A.A. Digital Image Processing in Information Systems; NSTU Publ.: Novosibirsk, Russia, 2002; 352p. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002; 797p. [Google Scholar]
- Sizikov, V.; Dovgan, A. Reconstruction of images smeared uniformly and non-uniformly. CEUR Workshop Proc. 2019, 2344, 11. [Google Scholar]
- Sizikov, V.S.; Dovgan, A.N.; Tsepeleva, A.D. Reconstruction of images smeared non-uniformly. J. Opt. Technol. 2020, 87, 1–8. [Google Scholar] [CrossRef]
- Sizikov, V.S. Direct and Inverse Problems of Image Restoration, Spectroscopy and Tomography with MatLab; Lan’ Publ.: St. Petersburg, Russia, 2017; 412p. [Google Scholar]
- Sizikov, V.S. Spectral method for estimating the point-spread function in the task of eliminating image distortions. J. Opt. Technol. 2017, 84, 95–101. [Google Scholar] [CrossRef]
- Sizikov, V.S.; Stepanov, A.V.; Mezhenin, A.V.; Burlov, D.I.; Éksemplyarov, R.A. Determining image-distortion parameters by spectral means when processing pictures of the earth’s surface obtained from satellites and aircraft. J. Opt. Technol. 2018, 85, 203–210. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing using MATLAB; Prentice Hall: Upper Saddle River, NJ, USA, 2004; 302p. [Google Scholar]
- Fergus, R.; Singh, B.; Hertzmann, A.; Roweis, S.T.; Freeman, W. Removing camera shake from a single photograph. ACM Trans. Graph. 2006, 25, 787–794. [Google Scholar] [CrossRef]
- Cho, S.; Lee, S. Fast motion deblurring. ACM Trans. Graph. 2009, 28. [Google Scholar] [CrossRef]
- Velho, L.; Frery, A.C.; Gomes, J. Image Processing for Computer and Vision Graphics, 2nd ed.; Springer: London, UK, 2009; 476p. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.Y. Solutions of Ill-Posed Problems; Winston: Washington, DC, USA, 1977. [Google Scholar]
- Engl, H.; Hanke, M.; Neubauer, A. Regularization of Inverse Problems; Kluwer: Dordrecht, The Netherlands, 1996; 328p. [Google Scholar]
- Petrov, Y.P.; Sizikov, V.S. Well-Posed, Ill-Posed, and Intermediate Problems with Applications; Publisher VSP: Leiden, The Netherlands, 2005; 234p. [Google Scholar]
- Hansen, P.C. Discrete Inverse Problems: Insight and Algoritms; SIAM: University City, PA, USA, 2010; 213p. [Google Scholar]
- Verlan, A.F.; Sizikov, V.S. Integral Equations: Methods, Algorithms, Programs; Naukova Dumka: Kiev, Ukraine, 1986; 544p. [Google Scholar]
- Sizikov, V.S. Estimating the point-spread function from the spectrum of a distorted tomographic image. J. Opt. Technol. 2015, 82, 655–658. [Google Scholar] [CrossRef]
- Bates, R.H.T.; McDonnell, M.J. Image Restoration and Reconstruction; Oxford U. Press: Oxford, UK, 1986; 320p. [Google Scholar]
- Jähne, B. Digital Image Processing; Springer: Berlin/Heidelberg, Germany, 2005; 549p. [Google Scholar] [CrossRef]
- Nagy, J.G.; Palmer, K.; Perrone, L. Iterative methods for image deblurring: A Matlab object-oriented approach. Numer. Algorithms 2004, 36, 73–93. [Google Scholar] [CrossRef]
- Sizikov, B.C. The truncation—Blurring—Rotation technique for reconstructing distorted images. J. Opt. Technol. 2011, 78, 298–304. [Google Scholar] [CrossRef]
- Lim, J.S. Two-Dimensional Signal and Image Processing; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1990; 694p. [Google Scholar]
- D’yakonov, V.; Abramenkova, I. MATLAB: Signal and Image Processing; Piter: St. Petersburg, Russia, 2002; 608p. [Google Scholar]
- Bezuglov, D.A.; Voronin, V.V.; Krutov, V.A. Images denoising in case impulse noise using spline approximation. MATEC Web Conf. 2018, 226. [Google Scholar] [CrossRef]
- Dell’Acqua, P.; Donatelli, M.; Estatico, C.; Mazza, M. Structure preserving preconditioners for image deblurring. J. Sci. Comput. 2017, 72, 147–171. [Google Scholar] [CrossRef]
- Smear. Available online: https://en.wikipedia.org/wiki/Smear (accessed on 4 June 2019).
- Smear (optics). Available online: https://en.wikipedia.org/wiki/Smear_(optics) (accessed on 6 April 2016).
- Time smearing. Available online: https://en.wikipedia.org/wiki/Time_smearing (accessed on 7 August 2019).
- Johnson, J.F. Modeling imager deterministic and statistical modulator transfer functions. Appl. Opt. 1993, 32, 6503–6513. [Google Scholar] [CrossRef] [PubMed]










© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sizikov, V.; Dovgan, A.; Lavrov, A. Eliminating Nonuniform Smearing and Suppressing the Gibbs Effect on Reconstructed Images. Computers 2020, 9, 30. https://doi.org/10.3390/computers9020030
Sizikov V, Dovgan A, Lavrov A. Eliminating Nonuniform Smearing and Suppressing the Gibbs Effect on Reconstructed Images. Computers. 2020; 9(2):30. https://doi.org/10.3390/computers9020030
Chicago/Turabian StyleSizikov, Valery, Aleksandra Dovgan, and Aleksei Lavrov. 2020. "Eliminating Nonuniform Smearing and Suppressing the Gibbs Effect on Reconstructed Images" Computers 9, no. 2: 30. https://doi.org/10.3390/computers9020030
APA StyleSizikov, V., Dovgan, A., & Lavrov, A. (2020). Eliminating Nonuniform Smearing and Suppressing the Gibbs Effect on Reconstructed Images. Computers, 9(2), 30. https://doi.org/10.3390/computers9020030