
A Qualitative and Comparative Performance Assessment of Logically Centralized SDN Controllers via Mininet Emulator

 ,
,  ,
,
Abstract
1. Introduction
- We present a more in-depth classification of SDN control plane architecture, shown in Figure 1;
- We classify and categorize 13 distributed but logically centralized SDN controllers according to their capabilities and give a qualitative evaluation of their attributes;
- A detailed survey of SDN controller performance based on Mininet is made;
- Using six performance metrics—bandwidth, round-trip time, delay, jitter, packet loss, and throughput—this work also assesses five distributed but logically centralized controllers against two custom network scenarios (uniform and non-uniform host distribution).

2. Related Work
3. Controller Classification and Design Choices
3.1. Selection Criteria
3.2. Qualitative Comparison
3.3. Mininet and Mininet Based Study
4. Topology Description and Quantitative Evaluation of Controllers
4.1. Selected Controllers and Their Qualitative Evaluation
4.2. Topology Description
4.3. Experiment Setup
5. Performance Analysis
5.1. Bandwidth
5.2. Round-Trip Time
5.3. Delay
5.4. Jitter
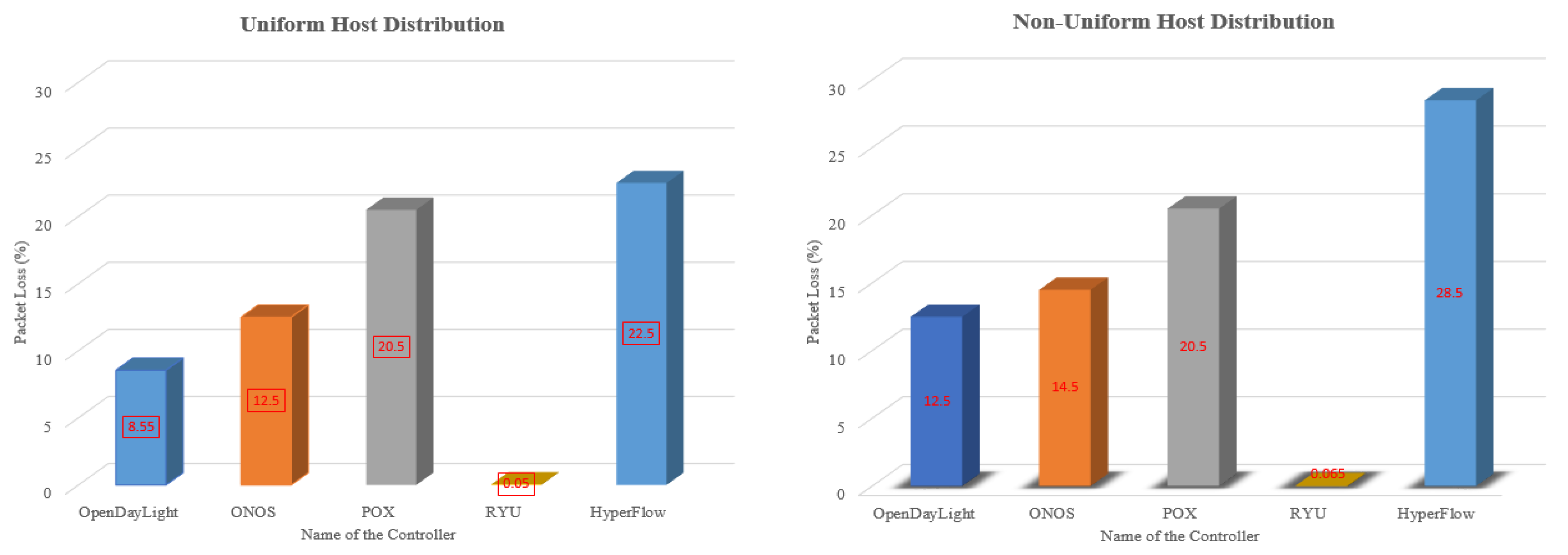
5.5. Packet Loss
5.6. Throughput
6. Discussion
6.1. Advantages of Logically Centralized Controllers
- Higher-level policies: Rather than using network identifiers, language used to describe policies is based on principles.
- Paths should be determined by policy: Depending on policy, the controller should choose the pathways.
- Fine-grained control: The data plane keeps a per-flow state while the controller manages the initial packet in a flow.
6.2. Challenges of Logically Centralized Controllers
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 5G | Fifth Generation |
| ASIC | Application Specific Integrated Circuit |
| AHP | Analytic Hierarchy Process |
| API | Application Programming Interface |
| CLI | Command Line Interface |
| CPU | Central Processing Unit |
| Cbench | Connection Benchmark |
| DCN | Data-Centric Network |
| EWBI | East West Bound Interface |
| EPL | Eclipse Public License |
| GUI | Graphical User Interface |
| IETF | Internet Engineering Task Force |
| ICMP | Internet Control Message Protocol |
| MCDM | Multi Criteria Decision Making |
| MFT | Mean Free Time |
| Ms | Milliseconds |
| Mbps | Megabytes per second |
| NS3 | Network Simulator 3 |
| NTT | Nippon Telegraph and Telephone |
| NETCONF | Network Configuration Protocol |
| NOX | Network Operating System |
| NBI | North Bound Interface |
| NETCONF | Network Configuration Protocol |
| NFV | Network Functions Virtualization |
| ODL | OpenDayLight |
| OF | OpenFlow |
| ONOS | Open Networking Operating System |
| OS | Operating System |
| OSGi | Open Service Gateway initiative |
| OF-config | OpenFlow Configuration and Management Protocol |
| OVSDB | Open vSwitch Database |
| ONOS | Open Network Operating System |
| POX | Pythonic Network Operating System |
| PC | Personal Computer |
| PING | Packet Internet Groper |
| QoS | Quality of Service |
| REST | Representational State Transfer |
| RESTCONF | RESTful Network Configuration Protocol |
| RTT | Round-Trip Time |
| RAM | Random Access Memory |
| ROIA | Real-Time Online Interactive Applications |
| SDN | Software Defined Networking |
| SD-IoT | Software Defined Internet of Thing |
| SD-WAN | Software Defined Wireless Access Network |
| SAT | Satellite |
| SBI | South Bound Interface |
| TCP | Transmission Control Protocol |
| TLS | Transport Layer Security |
| UDP | User Datagram Protocol |
| UI | User Interface |
| WAN | Wireless Access Network |
| XMPP | Extensible Messaging and Presence Protocol |
References
- Gautam, P.; Jha, S.; Yadav, C.S. Performance Comparison of the Proposed OpenFlow Network with the Pox Controller and the Traditional Network in Software Defined Networks (SDN). In Proceedings of the Artificial Intelligence and Communication Technologies; Hiranwal, S., Mathur, G., Eds.; Routledge: London, UK, 2022; pp. 537–552. [Google Scholar] [CrossRef]
- Zhu, L.; Karim, M.M.; Sharif, K.; Li, F.; Du, X.; Guizani, M. SDN controllers: Benchmarking & performance evaluation. arXiv 2019, arXiv:1902.04491. [Google Scholar]
- Nisar, K.; Jimson, E.R.; Hijazi, M.H.A.; Welch, I.; Hassan, R.; Aman, A.H.M.; Sodhro, A.H.; Pirbhulal, S.; Khan, S. A survey on the architecture, application, and security of software defined networking: Challenges and open issues. Internet Things 2020, 12, 100289. [Google Scholar] [CrossRef]
- Bhardwaj, S.; Panda, S.N. Performance evaluation using Ryu SDN controller in software- defined networking environment. Wirel. Pers. Commun. 2022, 122, 701–723. [Google Scholar] [CrossRef]
- Santos, M.A.; Nunes, B.A.; Obraczka, K.; Turletti, T.; De Oliveira, B.T.; Margi, C.B. Decentralizing SDN’s control plane. In Proceedings of the 39th Annual IEEE Conference on Local Computer Networks, Edmonton, AB, Canada, 8–11 September 2014; pp. 402–405. [Google Scholar] [CrossRef]
- Keshari, S.K.; Kansal, V.; Kumar, S. A systematic review of quality of services (QoS) in software defined networking (SDN). Wirel. Pers. Commun. 2021, 116, 2593–2614. [Google Scholar] [CrossRef]
- Ali, J.; Roh, B.H.; Lee, S. QoS improvement with an optimum controller selection for software-defined networks. PLoS ONE 2019, 14, e0217631. [Google Scholar] [CrossRef]
- Shirvar, A.; Goswami, B. Performance comparison of software-defined network controllers. In Proceedings of the 2021 International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), Bhilai, India, 19–20 February 2021; pp. 1–13. [Google Scholar]
- Bhat, D.; Rao, K.; Latha, N. A survey on software-defined networking concepts and architecture. Int. J. Sci. Technol. Manag. 2015, 4, 132–141. [Google Scholar]
- Xia, W.; Wen, Y.; Foh, C.H.; Niyato, D.; Xie, H. A survey on software-defined networking. IEEE Commun. Surv. Tutor. 2014, 17, 27–51. [Google Scholar] [CrossRef]
- Amin, R.; Reisslein, M.; Shah, N. Hybrid SDN networks: A survey of existing approaches. IEEE Commun. Surv. Tutor. 2018, 20, 3259–3306. [Google Scholar] [CrossRef]
- Islam, S.; Khan, M.A.I.; Shorno, S.T.; Sarker, S.; Siddik, M.A. Performance evaluation of SDN controllers in wireless network. In Proceedings of the 2019 1st International Conference on Advances in Science, Engineering and Robotics Technology (ICASERT), Dhaka, Bangladesh, 3–5 May 2019; pp. 1–5. [Google Scholar]
- Tootoonchian, A.; Gorbunov, S.; Ganjali, Y.; Casado, M.; Sherwood, R. On Controller Performance in Software-Defined Networks. In Proceedings of the 2nd USENIX Workshop on Hot Topics in Management of Internet, Cloud, and Enterprise Networks and Services (Hot-ICE 12), San Jose, CA, USA, 24 April 2012; pp. 1–6. [Google Scholar]
- Shalimov, A.; Zuikov, D.; Zimarina, D.; Pashkov, V.; Smeliansky, R. Advanced study of SDN/OpenFlow controllers. In Proceedings of the 9th Central & Eastern European Software Engineering Conference in Russia, Moscow, Russia, 24–25 October 2013; pp. 1–6. [Google Scholar]
- Khondoker, R.; Zaalouk, A.; Marx, R.; Bayarou, K. Feature-based comparison and selection of Software Defined Networking (SDN) controllers. In Proceedings of the 2014 World Congress on Computer Applications and Information Systems (WCCAIS), Hammamet, Tunisia, 17–19 January 2014; pp. 1–7. [Google Scholar]
- Bondkovskii, A.; Keeney, J.; van der Meer, S.; Weber, S. Qualitative comparison of open-source sdn controllers. In Proceedings of the NOMS 2016–2016 IEEE/IFIP Network Operations and Management Symposium, Istanbul, Turkey, 25–29 April 2016; pp. 889–894. [Google Scholar]
- Fernandez, M.P. Comparing openflow controller paradigms scalability: Reactive and proactive. In Proceedings of the 2013 IEEE 27th International Conference on Advanced Information Networking and Applications (AINA), Barcelona, Spain, 25–28 March 2013; pp. 1009–1016. [Google Scholar]
- Shah, S.A.; Faiz, J.; Farooq, M.; Shafi, A.; Mehdi, S.A. An architectural evaluation of SDN controllers. In Proceedings of the 2013 IEEE international conference on communications (ICC), Budapest, Hungary, 9–13 June 2013; pp. 3504–3508. [Google Scholar]
- Erickson, D. The beacon openflow controller. In Proceedings of the Second ACM SIGCOMM Workshop on Hot Topics in Software Defined Networking; 2013; pp. 13–18. [Google Scholar]
- Khorramizadeh, M.; Ahmadi, V. Capacity and load-aware software-defined network controller placement in heterogeneous environments. Comput. Commun. 2018, 129, 226–247. [Google Scholar] [CrossRef]
- Sahoo, K.S.; Puthal, D.; Obaidat, M.S.; Sarkar, A.; Mishra, S.K.; Sahoo, B. On the placement of controllers in software-defined-WAN using meta-heuristic approach. J. Syst. Softw. 2018, 145, 180–194. [Google Scholar] [CrossRef]
- Jalili, A.; Keshtgari, M.; Akbari, R.; Javidan, R. Multi criteria analysis of controller placement problem in software defined networks. Comput. Commun. 2019, 133, 115–128. [Google Scholar] [CrossRef]
- Karakus, M.; Durresi, A. A survey: Control plane scalability issues and approaches in software- defined networking (SDN). Comput. Netw. 2017, 112, 279–293. [Google Scholar] [CrossRef]
- Bannour, F.; Souihi, S.; Mellouk, A. Distributed SDN control: Survey, taxonomy, and challenges. IEEE Commun. Surv. Tutor. 2017, 20, 333–354. [Google Scholar] [CrossRef]
- Abuarqoub, A. A review of the control plane scalability approaches in software defined networking. Future Internet 2020, 12, 49. [Google Scholar] [CrossRef]
- Zhang, Y.; Cui, L.; Wang, W.; Zhang, Y. A survey on software defined networking with multiple controllers. J. Netw. Comput. Appl. 2018, 103, 101–118. [Google Scholar] [CrossRef]
- Benamrane, F.; Benaini, R. Performances of OpenFlow-based software-defined networks: An overview. J. Netw. 2015, 10, 329. [Google Scholar] [CrossRef]
- Isong, B.; Molose, R.R.S.; Abu-Mahfouz, A.M.; Dladlu, N. Comprehensive review of SDN controller placement strategies. IEEE Access 2020, 8, 170070–170092. [Google Scholar] [CrossRef]
- Zhu, L.; Karim, M.M.; Sharif, K.; Xu, C.; Li, F.; Du, X.; Guizani, M. SDN controllers: A comprehensive analysis and performance evaluation study. ACM Comput. Surv. 2020, 53, 1–40. [Google Scholar] [CrossRef]
- Mostafavi, S.; Hakami, V.; Paydar, F. Performance evaluation of software-defined networking controllers: A comparative study. Comput. Knowl. Eng. 2020, 2, 63–73. [Google Scholar]
- Elmoslemany, M.M.; Eldien, A.S.T.; Selim, M.M. Performance Analysis in Software Defined Network Controllers. In Proceedings of the 2020 15th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 15–16 December 2020; pp. 1–6. [Google Scholar]
- Gupta, N.; Maashi, M.S.; Tanwar, S.; Badotra, S.; Aljebreen, M.; Bharany, S. A comparative study of software defined networking controllers using Mininet. Electronics 2022, 11, 2715. [Google Scholar] [CrossRef]
- Alencar, F.; Santos, M.; Santana, M.; Fernandes, S. How Software Aging affects SDN: A view on the controllers. In Proceedings of the 2014 Global Information Infrastructure and Networking Symposium (GIIS), Montreal, QC, Canada, 15–19 September 2014; pp. 1–6. [Google Scholar]
- Salman, O.; Elhajj, I.H.; Kayssi, A.; Chehab, A. SDN controllers: A comparative study. In Proceedings of the 2016 18th Mediterranean Electrotechnical Conference (MELECON), Limassol, Cyprus, 18–20 April 2016; pp. 1–6. [Google Scholar]
- Paliwal, M.; Shrimankar, D.; Tembhurne, O. Controllers in SDN: A review report. IEEE Access 2018, 6, 36256–36270. [Google Scholar] [CrossRef]
- Sakellaropoulou, D. A Qualitative Study of SDN Controllers. Master’s Thesis, Athens University of Economics and Business, Athina, Greece, 2017. [Google Scholar]
- Bispo, P.; Corujo, D.; Aguiar, R.L. A qualitative and quantitative assessment of SDN controllers. In Proceedings of the 2017 International Young Engineers Forum (YEF-ECE), Caparica/Lisbon, Portugal, 7 July 2023; pp. 6–11. [Google Scholar]
- Mamushiane, L.; Lysko, A.; Dlamini, S. A comparative evaluation of the performance of popular SDN controllers. In Proceedings of the 2018 Wireless Days (WD), Dubai, United Arab Emirates, 3–5 April 2018; pp. 54–59. [Google Scholar]
- Rotsos, C.; Sarrar, N.; Uhlig, S.; Sherwood, R.; Moore, A.W. OFLOPS: An open framework for OpenFlow switch evaluation. In Proceedings of the Passive and Active Measurement: 13th International Conference, PAM 2012, Vienna, Austria, 12–14 March 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 85–95. [Google Scholar]
- Rotsos, C.; Antichi, G.; Bruyere, M.; Owezarski, P.; Moore, A.W. An open testing framework for next-generation OpenFlow switches. In Proceedings of the 2014 Third European Workshop on Software Defined Networks, Budapest, Hungary, 1–3 September 2014; pp. 127–128. [Google Scholar]
- Veryx Technologies. PktBlaster SDN Controller Test. Available online: http://sdn.veryxtech.com/ (accessed on 15 January 2024).
- Jarschel, M.; Lehrieder, F.; Magyari, Z.; Pries, R. A flexible OpenFlow-controller benchmark. In Proceedings of the 2012 European Workshop on Software Defined Networking, Darmstadt, Germany, 25–26 October 2012; pp. 48–53. [Google Scholar]
- Carneiro, G.J. NS3: Network Simulator 3. Available online: https://www.nsnam.org/tutorials/NS-3-LABMEETING-1.pdf (accessed on 15 January 2024).
- Prete, L.R.; Shinoda, A.A.; Schweitzer, C.M.; De Oliveira, R.L.S. Simulation in an SDN network scenario using the POX Controller. In Proceedings of the 2014 IEEE Colombian Conference on Communications and Computing (COLCOM), Bogota, Colombia, 4–6 June 2014; pp. 1–6. [Google Scholar]
- Benamrane, F.; Mamoun, M.B.; Benaini, R. Short: A case study of the performance of an openflow controller. In Proceedings of the International Conference on Networked Systems, Marrakech, Morocco, 15–17 May 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 330–334. [Google Scholar]
- De Oliveira, R.L.S.; Schweitzer, C.M.; Shinoda, A.A.; Prete, L.R. Using Mininet for emulation and prototyping software-defined networks. In Proceedings of the 2014 IEEE Colombian Conference on Communications and Computing (COLCOM), Bogota, Colombia, 4–6 June 2014; pp. 1–6. [Google Scholar]
- Berde, P.; Gerola, M.; Hart, J.; Higuchi, Y.; Kobayashi, M.; Koide, T.; Lantz, B.; O’Connor, B.; Radoslavov, P.; Snow, W.; et al. ONOS: Towards an open, distributed SDN OS. In Proceedings of the Third Workshop on Hot Topics in Software Defined Networking, Chicago, IL, USA, 17–22 August 2014; pp. 1–6. [Google Scholar]
- Stancu, A.L.; Halunga, S.; Vulpe, A.; Suciu, G.; Fratu, O.; Popovici, E.C. A comparison between several software defined networking controllers. In Proceedings of the 2015 12th International Conference on Telecommunication in Modern Satellite, Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 14–17 October 2015; pp. 223–226. [Google Scholar]
- Ramadona, S.; Hidayatulloh, B.A.; Siswanto, D.F.; Syambas, N. The simulation of SDN network using POX controller: Case in Politeknik Caltex Riau. In Proceedings of the 2015 9th International Conference on Telecommunication Systems Services and Applications (TSSA), Bandung, Indonesia, 25–26 November 2015; pp. 1–6. [Google Scholar]
- Keti, F.; Askar, S. Emulation of software defined networks using Mininet in different simulation environments. In Proceedings of the 2015 6th International Conference on Intelligent Systems, Modelling and Simulation, Kuala Lumpur, Malaysia, 9–12 February 2015; pp. 205–210. [Google Scholar]
- Rowshanrad, S.; Abdi, V.; Keshtgari, M. Performance evaluation of SDN controllers: FloodLight and OpenDayLight. IIUM Eng. J. 2016, 17, 47–57. [Google Scholar] [CrossRef]
- Jasim, A.; Hamid, D. Enhancing the performance of OpenFlow network by using QoS. Int. J. Sci. Eng. Res. 2016, 7, 950–955. [Google Scholar]
- Kaur, K.; Kaur, S.; Gupta, V. Performance analysis of python based openflow controllers. In Proceedings of the 3rd International Conference on Electrical, Electronics, Engineering Trends, Communication, Optimization and Sciences (EEECOS 2016), Washington, DC, USA, 9–11 February 2016; pp. 1–4. [Google Scholar]
- Bholebawa, I.Z.; Dalal, U.D. Design and performance analysis of OpenFlow-enabled network topologies using Mininet. Int. J. Comput. Commun. Eng. 2016, 5, 419–429. [Google Scholar] [CrossRef]
- Rastogi, A.; Bais, A. Comparative analysis of software defined networking (SDN) controllers—In terms of traffic handling capabilities. In Proceedings of the 2016 19th International Multi-Topic Conference (INMIC), Islamabad, Pakistan, 5–6 December 2016; pp. 1–6. [Google Scholar]
- Yamei, F.; Qing, L.; Qi, H. Research and comparative analysis of performance test on SDN controller. In Proceedings of the 2016 first IEEE International Conference on Computer Communication and the Internet (ICCCI), Wuhan, China, 13–15 October 2016; pp. 207–210. [Google Scholar]
- Bholebawa, I.Z.; Jha, R.K.; Dalal, U.D. Performance analysis of proposed OpenFlow-based network architecture using Mininet. Wirel. Pers. Commun. 2016, 86, 943–958. [Google Scholar] [CrossRef]
- Fancy, C.; Pushpalatha, M. Performance evaluation of SDN controllers POX and FloodLight in Mininet emulation environment. In Proceedings of the 2017 International Conference on Intelligent Sustainable Systems (ICISS), Palladam, India, 7–8 December 2017; pp. 695–699. [Google Scholar]
- Asadollahi, S.; Goswami, B.; Raoufy, A.S.; Domingos, H.G.J. Scalability of software defined network on FloodLight controller using OFNet. In Proceedings of the 2017 International Conference on Electrical, Electronics, Communication, Computer, and Optimization Techniques (ICEECCOT), Mysuru, India, 15–16 December 2017; pp. 1–5. [Google Scholar]
- Research, P.J.; Raj, P. Topology-based analysis of performance evaluation of centralized vs. distributed SDN controller. In Proceedings of the 2018 IEEE International Conference on Current Trends in Advanced Computing (ICCTAC), Bangalore, India, 1–2 February 2018; pp. 1–8. [Google Scholar]
- Mittal, S. Performance evaluation of openflow SDN controllers. In Proceedings of the Intelligent Systems Design and Applications: 17th International Conference on Intelligent Systems Design and Applications (ISDA 2017) held in Delhi, India, 14–16 December 2017; Springer: Berlin/Heidelberg, Germany, 2018; pp. 913–923. [Google Scholar]
- Jany, M.H.R.; Islam, N.; Khondoker, R.; Habib, M.A. Performance analysis of OpenFlow based software defined wired and wireless network. In Proceedings of the 2017 20th International Conference of Computer and Information Technology (ICCIT), Dhaka, Bangladesh, 22–24 December 2017; pp. 1–6. [Google Scholar]
- Abdullah, M.Z.; Al-Awad, N.A.; Hussein, F.W. Performance Comparison and Evaluation of Different Software Defined Networks Controllers. Int. J. Comput. Netw. Technol. 2018, 6, 1–7. [Google Scholar] [CrossRef]
- Bholebawa, I.Z.; Dalal, U.D. Performance analysis of SDN/OpenFlow controllers: POX versus FloodLight. Wirel. Pers. Commun. 2018, 98, 1679–1699. [Google Scholar] [CrossRef]
- Ali, J.; Lee, S.; Roh, B.H. Performance analysis of POX and Ryu with different SDN topologies. In Proceedings of the 1st International Conference on Information Science and Systems, Jeju, Republic of Korea, 27–29 April 2018; pp. 244–249. [Google Scholar]
- Asadollahi, S.; Goswami, B.; Sameer, M. Ryu controller’s scalability experiment on software defined networks. In Proceedings of the 2018 IEEE international conference on current trends in advanced computing (ICCTAC), Bangalore, India, 1–2 February 2018; pp. 1–5. [Google Scholar]
- Jawaharan, R.; Mohan, P.M.; Das, T.; Gurusamy, M. Empirical evaluation of sdn controllers using Mininet/Wireshark and comparison with cbench. In Proceedings of the 2018 27th International Conference on Computer Communication and Networks (ICCCN), Hangzhou, China, 30 July–2 August 2018; pp. 1–2. [Google Scholar]
- Sameer, M.; Goswami, B. Experimenting with ONOS scalability on software defined network. J. Adv. Res. Dyn. Control Syst. 2018, 10, 1820–1830. [Google Scholar]
- Hossain, M.A.; Sheikh, M.N.A.; Rahman, S.S.; Biswas, S.; Arman, M.A.I. Enhancing and measuring the performance in software defined networking. Int. J. Comput. Netw. Commun. 2018, 10, 27–39. [Google Scholar] [CrossRef]
- Sheikh, M.N.A.; Halder, M.; Kabir, S.S.; Mohalder, R.N. Performance Evaluation on Software Defined Networking through External Controller FloodLight and Internal Controller NOX. Int. J. Sci. Eng. Res. 2018, 9, 1753–1758. [Google Scholar]
- Shamim, S.; Shisir, S.; Hasan, A.; Hasan, M.; Hossain, A. Performance analysis of different open flow based controller over software defined networking. Glob. J. Comput. Sci. Technol. 2018, 18, 11–15. [Google Scholar]
- Altangerel, G.; Chuluuntsetseg, T.; Yamkhin, D. Performance analysis of SDN controllers: POX, FloodLight and OpenDayLight. arXiv 2021, arXiv:2112.10387. [Google Scholar]
- Baskoro, F.; Hidayat, R.; Wibowo, S.B. Comparing LACP implementation between Ryu and OpenDayLight SDN controller. In Proceedings of the 2019 11th International Conference on Information Technology and Electrical Engineering (ICITEE), Pattaya, Thailand, 10–11 October 2019; pp. 1–4. [Google Scholar]
- Baskoro, F.; Hidayat, R.; Wibowo, S.B. LACP Experiment using Multiple Flow Table in Ryu SDN Controller. In Proceedings of the 2019 2nd International Conference on Applied Information Technology and Innovation (ICAITI), Denpasar, Indonesia, 21–22 September 2019; pp. 51–55. [Google Scholar] [CrossRef]
- Arahunashi, A.K.; Neethu, S.; Ravish Aradhya, H.V. Performance Analysis of Various SDN Controllers in Mininet Emulator. In Proceedings of the 2019 4th International Conference on Recent Trends on Electronics, Information, Communication Technology (RTEICT), Bangalore, India, 17–18 May 2019; pp. 752–756. [Google Scholar] [CrossRef]
- Manuel, T.; Goswami, B. Experimenting with scalability of beacon controller in software defined network. Int. J. Recent Technol. Eng. 2019, 7, 550–555. [Google Scholar]
- Badotra, S.; Panda, S.N. Evaluation and comparison of OpenDayLight and open networking operating system in software-defined networking. Clust. Comput. 2019, 23, 1281–1291. [Google Scholar] [CrossRef]
- Sheikh MN, A.; Halder, M.; Kabir, S.S.; Miah, M.W.; Khatun, S. SDN-Based approach to evaluate the best controller: Internal controller NOX and external controllers POX, ONOS, Ryu. Glob. J. Comput. Sci. Technol. 2019, 19, 21–32. [Google Scholar] [CrossRef]
- Pramudita, A.; Suartana, I. Perbandingan Performa Controller OpenDayLight dan Ryu pada Arsitektur Software Defined Network. J. Inform. Comput. Sci. (JINACS) 2020, 1, 174–178. [Google Scholar] [CrossRef]
- Noman, H.; Jasim, M. POX controller and open flow performance evaluation in software defined networks (sdn) using Mininet emulator. IOP Conf. Ser. Mater. Sci. Eng. 2020, 881, 012102. [Google Scholar] [CrossRef]
- Li, Y.; Guo, X.; Pang, X.; Peng, B.; Li, X.; Zhang, P. Performance Analysis of FloodLight and Ryu SDN Controllers under Mininet Simulator. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Chongqing, China, 9–11 August 2020; pp. 85–90. [Google Scholar] [CrossRef]
- Islam, M.T.; Islam, N.; Refat, M.A. Node to node performance evaluation through Ryu SDN controller. Proc. Wirel. Pers. Commun. 2020, 112, 555–570. [Google Scholar] [CrossRef]
- Silva, J.B.; Silva FS, D.; Neto, E.P.; Lemos, M.; Neto, A. Benchmarking of mainstream SDN controllers over open off-the-shelf software-switches. Internet Technol. Lett. 2020, 3, e152. [Google Scholar] [CrossRef]
- Eltaj, A.; Hassan, A. Performance Evaluation of SDN Controllers: FloodLight, POX and NOX. Proc. Int. J. Eng. Appl. Sci. 2020, 7, 16–43. [Google Scholar] [CrossRef]
- Abidin, N.Z.; Fiade, A.; Aripiyanto, S.; Handayani, V. Performance Analysis of POX and Ryu Controller on Software Defined Network with Spanning Tree Protocol. In Proceedings of the 2021 9th International Conference on Cyber and IT Service Management (CITSM), Bengkulu, Indonesia, 22–23 September 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Lunagariya, D.; Goswami, B. A Comparative Performance Analysis of Stellar SDN Controllers using Emulators. In Proceedings of the 2021 International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), Bhilai, India, 19–20 February 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Daha, M.Y.; Zahid, M.S.M.; Husain, K.; Ousta, F. Performance Evaluation of Software Defined Networks with Single and Multiple Link Failure Scenario under FloodLight Controller. In Proceedings of the 2021 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 19–20 February 2021; pp. 959–965. [Google Scholar] [CrossRef]
- Sheikh, M.N.A.; Hwang, I.S.; Ganesan, E.; Kharga, R. Performance Assessment for different SDN-Based Controllers. In Proceedings of the 2021 30th Wireless and Optical Communications Conference (WOCC), Taipei, Taiwan, 7–8 October 2021; pp. 24–25. [Google Scholar] [CrossRef]
- Bhattacharyya, A.; Prakasam, P. Performance Evaluation of Various Topological Software Defined Networks Using Mininet Simulator and POX Controller. In Proceedings of the 2022 Second International Conference on Next Generation Intelligent Systems (ICNGIS), Kottayam, India, 29–31 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Elmoslemany, M.M.; Tag Eldien, A.S.; Selim, M.M. Performance Analysis in Software Defined Network (SDN) Multi-Controllers. Proc. Delta Univ. Sci. J. 2023, 6, 181–192. [Google Scholar] [CrossRef]
- Naim, N.; Imad, M.; Hassan, M.A.; Afzal, M.B.; Khan, S.; Khan, A.U. POX and Ryu Controller Performance Analysis on Software Defined Network. EAI Endorsed Trans. Internet Things 2023, 9, e5. [Google Scholar] [CrossRef]
- Ram, A.; Dutta, M.P.; Chakraborty, S.K. A Flow-Based Performance Evaluation on RYU SDN Controller. J. Inst. Eng. Ser. B 2024, 1–13. [Google Scholar] [CrossRef]
- Koulouras, I.; Bobotsaris, I.; Margariti, S.V.; Stergiou, E.; Stylios, C. Assessment of SDN Controllers in Wireless Environment Using a Multi-Criteria Technique. Information 2023, 14, 476. [Google Scholar] [CrossRef]
- Ganjali, Y.; Tootoonchian, A. Hyperflow: A distributed control plane for openflow. In Proceedings of the 2010 Internet Network Management Conference on Research on Enterprise Networking (INM/WREN’10), San Jose, CA, USA, 27 April 2010; pp. 1–3. [Google Scholar]
- Ahmad, S.; Mir, A.H. SDN interfaces: Protocols, taxonomy and challenges. Int. J. Wirel. Microw. Technol. 2022, 2, 11–32. [Google Scholar] [CrossRef]
- Levin, D.; Wundsam, A.; Heller, B.; Handigol, N.; Feldmann, A. Logically Centralized? State Distribution Tradeoffs in Software Defined Networks. In Proceedings of the Workshop on Hot Topics in Software Defined Networks (HotSDN ‘12) at ACM SIGCOMM 2012, Helsinki, Finland, 13 August 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Jyotish, N.K.; Singh, L.K.; Kumar, C. A state-of-the-art review on performance measurement petri net models for safety critical systems of NPP. Ann. Nucl. Energy 2022, 165, 108635. [Google Scholar] [CrossRef]
- Chang, Y.; Rezaei, A.; Vamanan, B.; Hasan, J.; Rao, S.; Vijaykumar, T.N. Hydra: Leveraging Functional Slicing for Efficient Distributed SDN Controllers. In Proceedings of the 2017 9th IEEE International Conference on Communication Systems and Networks (COMSNETS), Bengaluru, India, 4–8 January 2017; pp. 251–258. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Software Framework | Language | API Style | OpenFlow Support | Communication Mechanism | Platforms | Interface | Licensing | Multithreading | Modularity Level | Consistency Enforcement | Documentation Depth |
|---|---|---|---|---|---|---|---|---|---|---|---|
| HyperFlow | C++ | RESTful | 1.0 | Publish/Subscribe | Linux | Web UI | Custom | Yes | Moderate | Absent | Minimal |
| Onix | C++ | Onix Specific | 1.0, OVSDB | Coordination Service | Linux | Command Line | Open Source (Apache 2.0) | Yes | High | Absent | Minimal |
| Kandoo | C, C++, Python | Java RPC | 1.0–1.2 | Message Passing | Linux | Command Line | Custom | Yes | Extensive | Absent | Minimal |
| B4 | C++ | BGP | Not Specified | Not Specified | Linux | Not Specified | Custom | Not Specified | Not Specified | Not Specified | Minimal |
| OpenDay-Light | Java | Multiple RESTful Protocols | 1.0, 1.3 | Distributed Coordination | Cross-Platform | Command Line and Web UI | Open Source (EPL 1.0) | Yes | Extensive | Present | Moderate |
| POX | Python | Ad-hoc | 1.0 | Scripting | Cross-Platform | Command Line and GUI | Open Source (Apache 2.0) | No | Low | Absent | Minimal |
| Ryu | Python | RESTful | 1.0–1.5 | Scripting | Linux, MacOS | Command Line | Open Source (Apache 2.0) | Yes | Moderate | Present | Moderate |
| SWAN | Python | RESTful | Not Specified | Scripting | Cross-Platform | Not Specified | Custom | Not Specified | Not Specified | Not Specified | Minimal |
| ElastiCon | Java | Not Mentioned | Not Specified | Not Specified | Not Specified | Not Specified | Custom | Not Specified | Not Specified | Not Specified | Minimal |
| ONOS | Java | RESTful and Neutron | 1.0, 1.3 | Consensus Algorithm | Cross-Platform | Command Line and Web UI | Open Source (Apache 2.0) | Yes | Extensive | Present | Moderate |
| Ravana | Python | OF Direct | Extensions Supported | Not Specified | Linux | Not Specified | Custom | Not Specified | Not Specified | Not Specified | Minimal |
| SMaRtLight | Java | RESTful | 1.3 | Consensus Protocol | Linux | Command Line | Custom | Not Specified | Not Specified | Absent | Minimal |
| Espresso | Java | RESTful | Not Specified | Not Specified | Linux | Not Specified | Custom | Not Specified | Not Specified | Not Specified | Minimal |
| Ref. | Controller’s Evaluated | Topology Used | Evaluation Metrics | Lessons Learned |
|---|---|---|---|---|
| [4] | Ryu | Single | Bandwidth, Throughput, RTT, Transmission of Data Packet | Ryu is regarded as one of the most effective traffic engineering controllers. |
| [7] | ODL, Ryu | Internet and Bridge | Topology Discovery Time, Delay, Throughput, CPU Utilization | ODL outperforms Ryu for both the Internet and Bridge topologies. |
| [17] | FloodLight, NOX, POX, Trema | - | Proactive, Reactive | Reactive technique lowers controller performance, whereas a proactive controller receives fewer request messages. |
| [30] | Ryu, POX, FloodLight, ODL, ONOS | Single, Linear, Tree (Google and Facebook) | Latency, Throughput, Delay, Bandwidth | ODL performs better among the selected distributed controllers, whereas Ryu performs best among the selected centralized controllers. |
| [32] | ODL, Ryu | Custom | Latency | ODL performs best. |
| [44] | POX | - | Bandwidth | Prior to self-learning, the execution switch component has more bandwidth. |
| [45] | Ryu | Linear | Latency | The controller receives more requests as the network grows. |
| [46] | FloodLight | Linear, Tree | Time to Create and Destroy the Virtual Networks, Memory Usage | When the number of virtual networks increases, the Mininet takes a longer time and uses more memory. |
| [47] | ONOS | Custom | Latency, Topology Discovery Time | ONOS needs more work to be done to be accepted by all. |
| [48] | POX, Ryu, ONOS, ODL | Tree | RTT, Bandwidth | ONOS performs better in Switch mode, Hub mode performance is nearly the same. |
| [49] | POX | Linear | RTT, Delay, Bandwidth, Throughput, Mean Data Rate | Hub components outperform Switch components in terms of performance. |
| [50] | POX, FloodLight | Tree | Scalability | Simulation environment vs. time needed to construct a topology is noteworthy. |
| [51] | FloodLight, ODL | Single, Linear, Tree | Latency and Packet Loss | FloodLight outperforms ODL in terms of packet loss for tree topologies and latency for linear topologies in densely trafficked networks, while ODL demonstrates better latency performance in networks with low load and for tree topologies with medium load. |
| [52] | FloodLight, Beacon, Open-MUL, Open-IRIS | TCP, UDP and ICMP Traffic | Time of the First Packet, RTT, Transfer Time, Packet Loss | Using QoS in the OF network improves FloodLight controller performance. |
| [53] | POX, Ryu and Pyretic | Star | RTT, Latency, Throughput | Ryu outperforms Pyretic and POX in terms of speed. |
| [54] | OF reference Controller | Single, Linear, Tree | Bandwidth Utilization, Packet Transmission Rate, Round-Trip Propagation Delay, Throughput | The scalability issue is mitigated in a tree topology network where the load is distributed across branches. |
| [55] | POX and Ryu | Combination of (Linear and Tree), DCN Tree, Mesh | Bit-rate, Delay, Packet-rate, and Jitter | POX performs better in layer 1 switching scenarios, whereas Ryu produced far higher performance outcomes in layer 2 switching. |
| [56] | ODL and ONOS | Tree | Cluster Failure Recovery Time | For GUI, clusters, link-up, switch-up, and throughput, ONOS performs well. For stability and topology discovery, ODL performs better. |
| [57] | OF- reference Controller | Custom | Bandwidth, Throughput, Jitter, Packet Loss | OF network operates similarly to a regular network, except that the data plane and control plane are separated. |
| [58] | POX, FloodLight | Star, Linear, Tree | Delay, Throughput | The FloodLight Controller performs better than the POX. |
| [59] | FloodLight | Mesh | Throughput and Latency | The network is subject to load as the number of nodes linked to switches rises. |
| [60] | FloodLight, ODL | Tree, Single, Linear, Torus | Throughput, Data Transfer Rate and Latency | FloodLight works better in linear, tree, and torus topologies but not in a single topology. |
| [61] | OVS- Controller, POX, FloodLight, ODL | Single, Linear, Tree | Latency, Bandwidth Utilization, Jitter, Packet Loss | In linear topologies, FloodLight Controller has severe data loss, whereas ODL Controller is unable to manage the load provided by it. |
| [62] | OF reference controller | Custom | Throughput, RTT, Delay, Jitter | Delay, Jitter, RTT and throughput are efficient QoS parameters. |
| [63] | Libfluid, ONOS, ODL, POX and Ryu | Linear | Throughput, Delay | As the number of switches and hosts rose, throughput declined and latency increased. |
| [64] | POX, FloodLight | Single, Linear, Tree, Custom | Throughput and Round-Trip Delay | The FloodLight controller offers more effective performance. Controllers with fewer features are more appropriate for activities involving configuration. For activities that are performance-based, feature-based controllers work well. |
| [65] | POX, Ryu | Single, Linear, Tree, Dumbbell, DCN, SAT | Throughput, Latency | Ryu has superior performance. |
| [66] | Ryu | Mesh | Throughput | Ryu is an extremely resource-demanding controller. |
| [67] | ONOS, Open MUL, POX | Linear | Latency, Throughput, Topology Discovery Time | Performance evaluation is considerably underestimated by Cbench. |
| [68] | ONOS | Mesh | Throughput | When there are varying numbers of nodes, ONOS acts steadily. |
| [69] | NOX | Custom | Throughput, Response Time | Compared to ROIA and Multiple Packet Schedular, NOX performs better. |
| [70] | NOX, FloodLight | Custom | Throughput, Response Time | The internal NOX controller is inferior to the FloodLight controller. |
| [71] | Ryu, POX and Pyretic | Tree | RTT | The pyretic controller performs better with Software Defined Networking. |
| [72] | POX, FloodLight, ODL | Tree, Mesh | RTT, Throughput | POX outperforms FloodLight and ODL in terms of RTT and throughput. |
| [73] | ODL, Ryu | Tree | Throughput, Switchover Time | Compared to Mininet simulation, utilizing a hardware testbed experiment offers greater and more consistent throughput. |
| [74] | Ryu | Tree | Throughput, Switchover Time | Number of flow entries within the data plane can be reduced by using MFT. |
| [75] | Ryu, FloodLight, ODL, ONOS | Linear, Tree, Mesh | Delay, Throughput | In terms of throughput and latency, the FloodLight controller performs better. |
| [76] | Beacon | Mesh | Throughput | When the number of nodes increases, throughput decreases. |
| [77] | ODL, ONOS | Tree | Burst Rate, Throughput, RTT and Bandwidth | The ODL controller outperforms the ONOS. |
| [78] | NOX, POX, ONOS, Ryu | Custom | Throughput, Response Time | For response time, POX is superior, whereas for throughput, ONOS is superior. |
| [78] | Ryu, POX, ONOS, FloodLight | Linear | Delay, Jitter and Throughput. | FloodLight performs best. |
| [79] | ODL, Ryu | Linear | Throughput, Delay, Packet Loss, Resource Utilization | Resource Utilization tests revealed that the ODL controller performed better. |
| [80] | POX | Linear | Bandwidth, CPU Load, Packet Loss, Latency, Throughput | There is effective bandwidth usage when the bandwidth begins at 100 Mbps and increases progressively to 500 Mbps. |
| [81] | FloodLight, Ryu | Single, Minimal, Linear, Tree, Reverse, Custom | Bandwidth, Latency | The FloodLight controller performs better than the Ryu controller. |
| [82] | Ryu | Single | Bandwidth, Throughput, RTT, Jitter, Packet Loss | Ryu is a great option for research and small commercial applications. |
| [83] | ONOS, FloodLight, Ryu | Leaf Spine DCN | Throughput, Topology Discovery Time | ONOS controller performs poorest in network topology discovery time and best in flow testing. |
| [84] | FloodLight, POX, NOX | Linear, Tree, Custom | Throughput, Bandwidth, Packet Loss, Latency, Topology Discovery Time | The FloodLight controller is fastest in all topologies. |
| [85] | POX, Ryu | Mesh | Throughput, Delay, Jitter, Packet Loss | The Ryu controller performs better than the POX controller. |
| [86] | Ryu, ODL, FloodLight, Beacon, IRIS, ONOS, POX | Tree | Throughput, Jitter, Latency, and Stability | An increase in hosts or switches has an impact on performance. |
| [87] | FloodLight | Single, Linear, Tree | Throughput, RTT | By rerouting traffic with a greater RTT and lower throughput, SDN can handle link failure circumstances. |
| [88] | NOX, ONOS, FloodLight, ODL, POX, Ryu | Custom | Throughput, Response Time | An increasing number of operations impacts throughput and response time. |
| [89] | POX | Tree, Bus, Star | Bandwidth Utilization, Jitter and Packet Loss | The number of open switches plays a significant role in the star topology. |
| [90] | ODL | Custom | Delay, Throughput, Jitter, Packet Drop, Bitrate, Bytes Received. | Multi-controller networks are more dependable and achieve high availability. |
| [91] | POX, Ryu | Custom | Jitter, Packet Loss, Throughput, Packet Delivery | The POX controller offers superior throughput results. The Ryu controller functions better in terms of packet delivery ratio, jitter, and packet loss. |
| [92] | Ryu | bespoke network topology | RTT, bandwidth and throughput | Ryu outperforms other controllers. |
| Name | HyperFlow | OpenDayLight | POX | Ryu | ONOS | |
|---|---|---|---|---|---|---|
| Features | ||||||
| Programming Language | C++ | Java | Python | Python | Java | |
| North Bound API | REST | REST, RESTCONF, XMPP, NETCONF | Adhoc | REST | REST, Neutron | |
| South Bound API | OpenFlow 1.0 | OpenFlow 1.0, 1.3 | OpenFlow 1.0 | OpenFlow 1.0, 1.5 | OpenFlow 1.0, 1.3 | |
| East Bound API | Publish and subscribe messages | Akka, Raft | Python Script | Python Script | Raft | |
| Supported Platform | Linux | Linux, MacOS, Windows | Linux, MacOS, Windows | Linux, MacOS | Linux, MacOS, Windows | |
| Interface | Web UI | CLI, Web UI | CLI, GUI | CLI | CLI, Web UI | |
| License | Proprietary | EPL 1.0 | Apache 2.0 | Apache 2.0 | Apache 2.0 | |
| Multi-threading | Yes | Yes | No | Yes | Yes | |
| Modularity | Fair | High | Low | Fair | High | |
| Consistency | No | Yes | No | Yes | Yes | |
| Documentation | Limited | Good | Limited | Good | Good | |
| Application Area | Data Centre, SD-WAN, IoT, Cloud Networking | Data Centre, Enterprise Network, Research and Education | Research, Education and Learning, SDN Application Development | Campus, Research, SDN application development, NFV, Network monitoring and security | Data centre, Carrier-Grade Network, Research, SDN/NFV integration | |
| Parameters | Description | Value |
|---|---|---|
| s | Identify session as server | No value passed |
| i | Reporting intervals | 1 s |
| t | Time interval | 100 s |
| f | Output format | M |
| w | Window size | 100 M |
| c | Identify session as client | 10.0.0.x server’s IP |
| OpenDayLight | Bandwidth | Jitter | Throughput | |||||||||||||||||||||
| Uniform | Non-uniform | Uniform | Non-uniform | Uniform | Non-uniform | |||||||||||||||||||
| POX | Ryu | ONOS | HyperFlow | POX | Ryu | ONOS | HyperFlow | POX | Ryu | ONOS | HyperFlow | POX | Ryu | ONOS | HyperFlow | POX | Ryu | ONOS | HyperFlow | POX | Ryu | ONOS | HyperFlow | |
| 1.00 | 0.97 | 1.24 | 1.11 | 0.95 | 0.85 | 1.69 | 1.36 | 6.26 | 3.87 | 10.15 | 17.57 | 6.49 | 1.57 | 16.30 | 22.92 | 0.99 | 1.77 | 1.02 | 1.34 | 0.87 | 1.77 | 0.96 | 1.08 | |
| Ryu | Delay | Round-Trip Time | Packet Loss | |||||||||||||||||||||
| Uniform | Non-uniform | Uniform | Non-uniform | Uniform | Non-uniform | |||||||||||||||||||
| ODL | ONOS | POX | HyperFlow | ODL | ONOS | POX | HyperFlow | ODL | ONOS | POX | HyperFlow | ODL | ONOS | POX | HyperFlow | ODL | ONOS | POX | HyperFlow | ODL | ONOS | POX | HyperFlow | |
| 0.91 | 3.30 | 2.61 | 2.50 | 0.36 | 1.63 | 0.67 | 1.32 | 1.11 | 6.04 | 4.03 | 24.02 | 1.03 | 3.52 | 5.52 | 30.86 | 8.45 | 12.45 | 20.45 | 22.45 | 12.44 | 14.44 | 20.44 | 28.44 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheikh, M.N.A.; Hwang, I.-S.; Raza, M.S.; Ab-Rahman, M.S. A Qualitative and Comparative Performance Assessment of Logically Centralized SDN Controllers via Mininet Emulator. Computers 2024, 13, 85. https://doi.org/10.3390/computers13040085
Sheikh MNA, Hwang I-S, Raza MS, Ab-Rahman MS. A Qualitative and Comparative Performance Assessment of Logically Centralized SDN Controllers via Mininet Emulator. Computers. 2024; 13(4):85. https://doi.org/10.3390/computers13040085
Chicago/Turabian StyleSheikh, Mohammad Nowsin Amin, I-Shyan Hwang, Muhammad Saibtain Raza, and Mohammad Syuhaimi Ab-Rahman. 2024. "A Qualitative and Comparative Performance Assessment of Logically Centralized SDN Controllers via Mininet Emulator" Computers 13, no. 4: 85. https://doi.org/10.3390/computers13040085
APA StyleSheikh, M. N. A., Hwang, I.-S., Raza, M. S., & Ab-Rahman, M. S. (2024). A Qualitative and Comparative Performance Assessment of Logically Centralized SDN Controllers via Mininet Emulator. Computers, 13(4), 85. https://doi.org/10.3390/computers13040085