
Hierarchical Control for DC Microgrids Using an Exact Feedback Controller with Integral Action




Abstract
:1. Introduction
1.1. General Context
1.2. Motivation
1.3. Review of the State of the Art
1.4. Contribution and Scope
- The global stabilization of the voltage profiles in a DC microgrid by using an exact feedback controller design with integral gain. This controller helps to ensure asymptotic stability in the sense of Lyapunov during closed-loop operation. The main advantage of this control design is that the voltage variables are stabilized in their references in a settling time that does not exceed 10 ms.
- The usage of a quadratic convex approximation to solve the optimal power flow problem in the tertiary control stage. This optimal power flow formulation has the main advantage of ensuring the global optimum finding convergence owing to the convexity of the solution space regarding the power flow equations since these are recursive linearized through a Taylor’s series approximation.
1.5. Organization of the Document
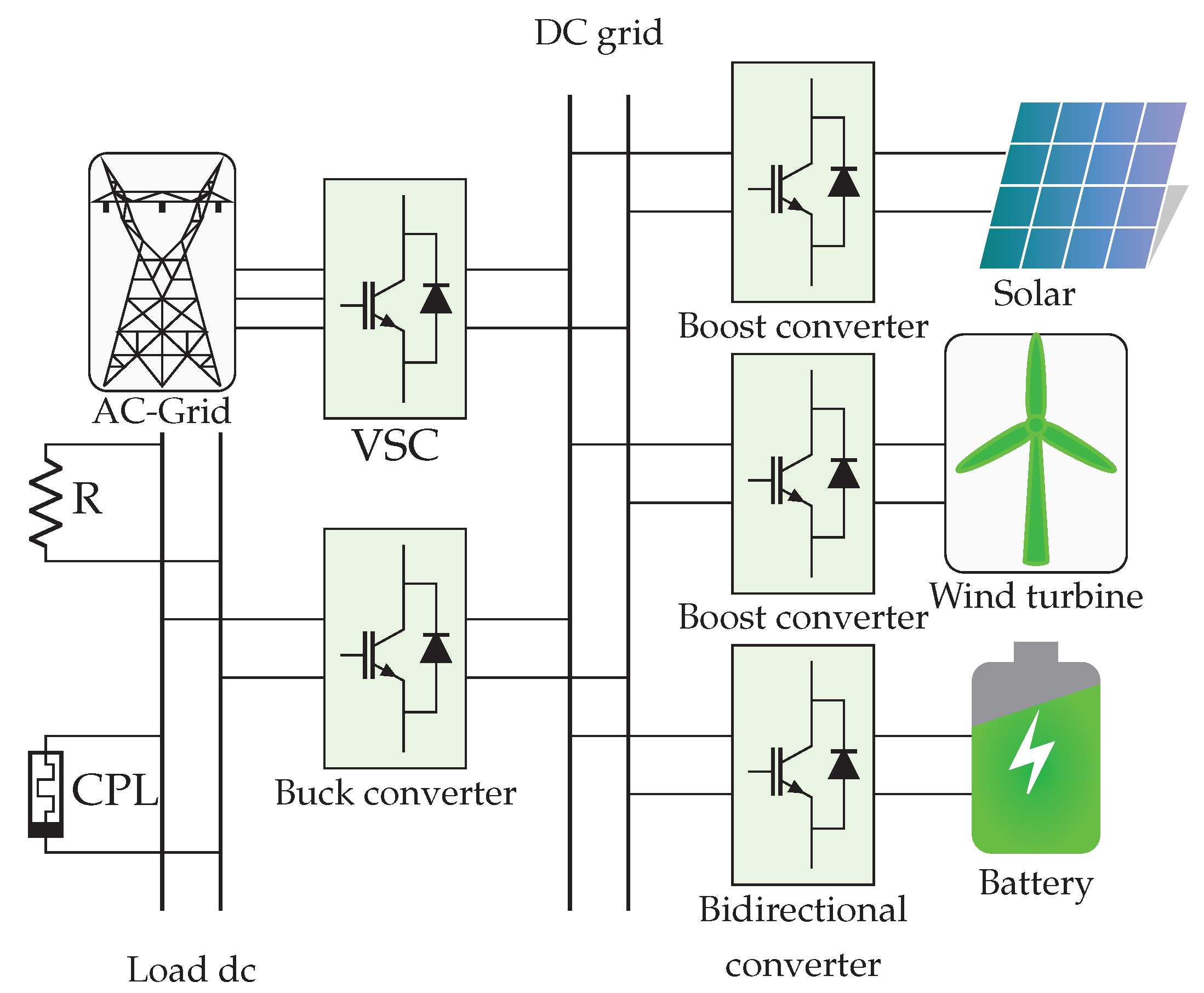
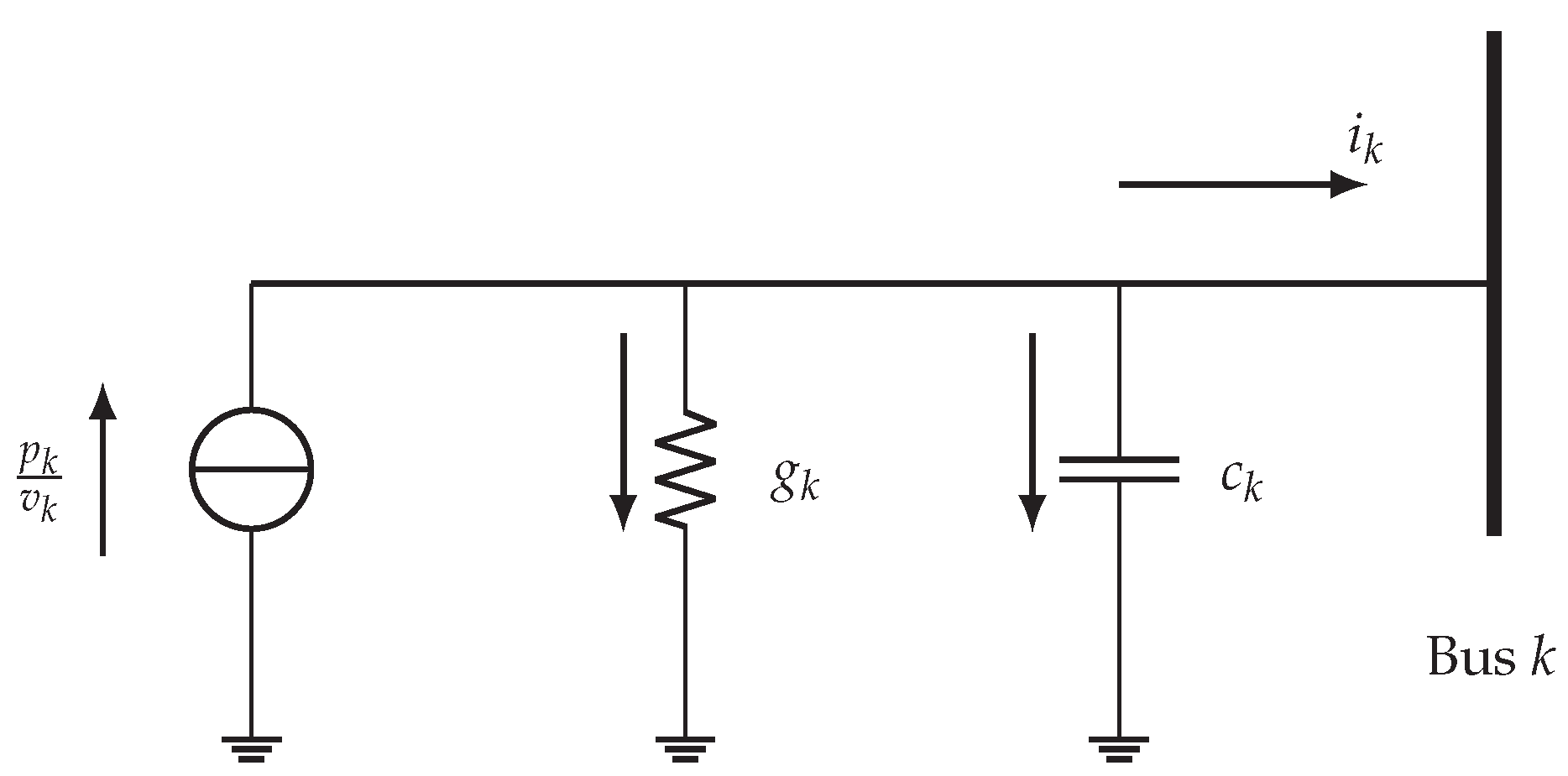
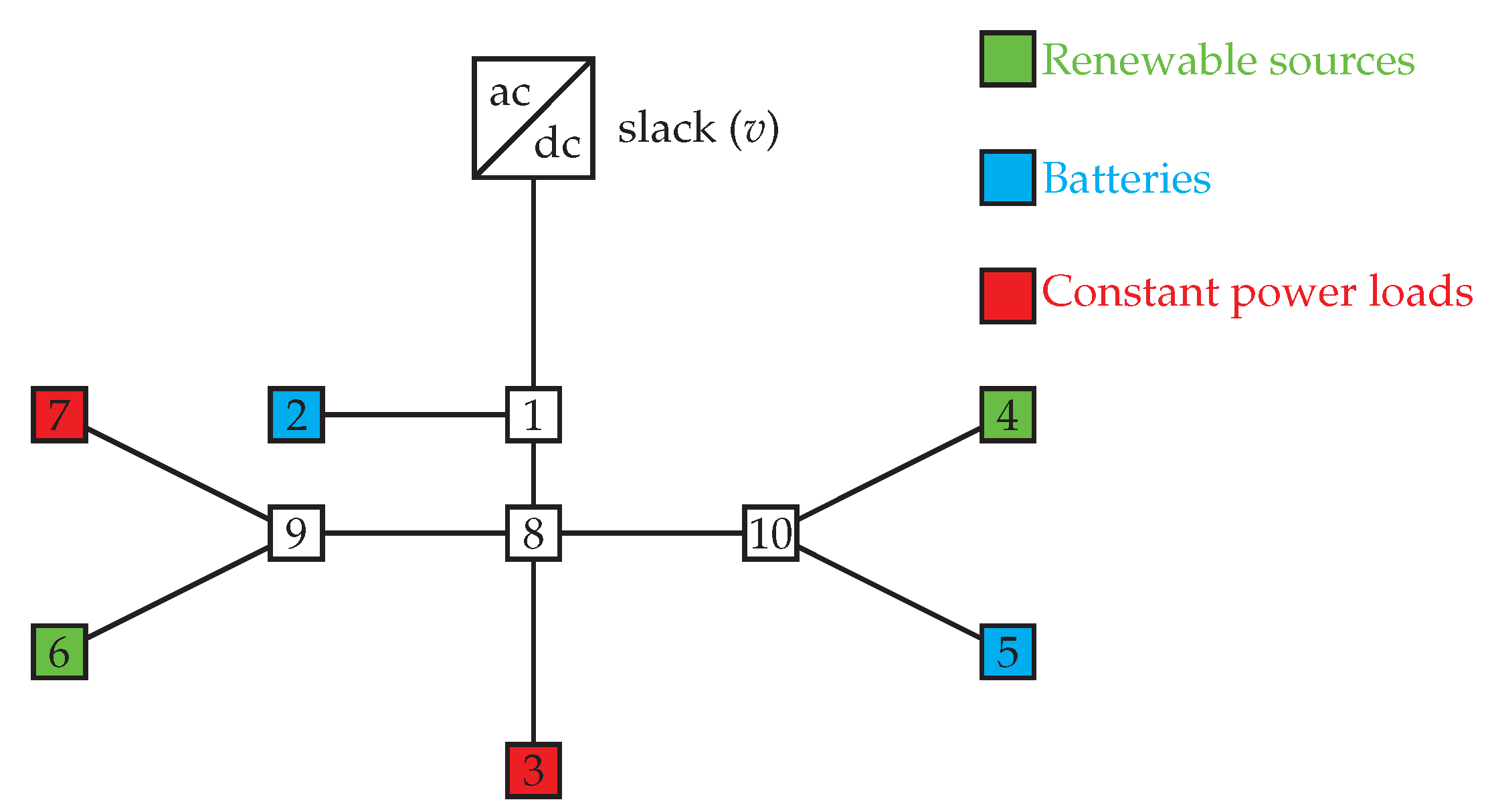
2. Grid Modeling
3. Exact Feedback Controller Design
4. Equilibrium Point Calculation
5. Hierarchical Proposed Controller
| Algorithm 1: Hierarchical control design for stabilizing DC microgrids. |
| Data: Define DC grid topology and read the available power generation and consumptions. |
| e = 1; |
| for do |
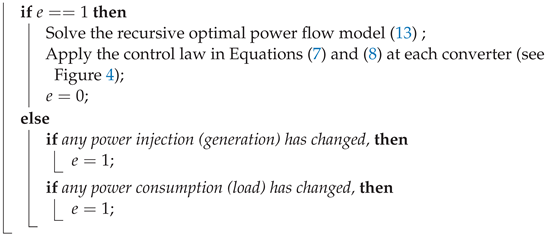 |
6. Numerical Validation
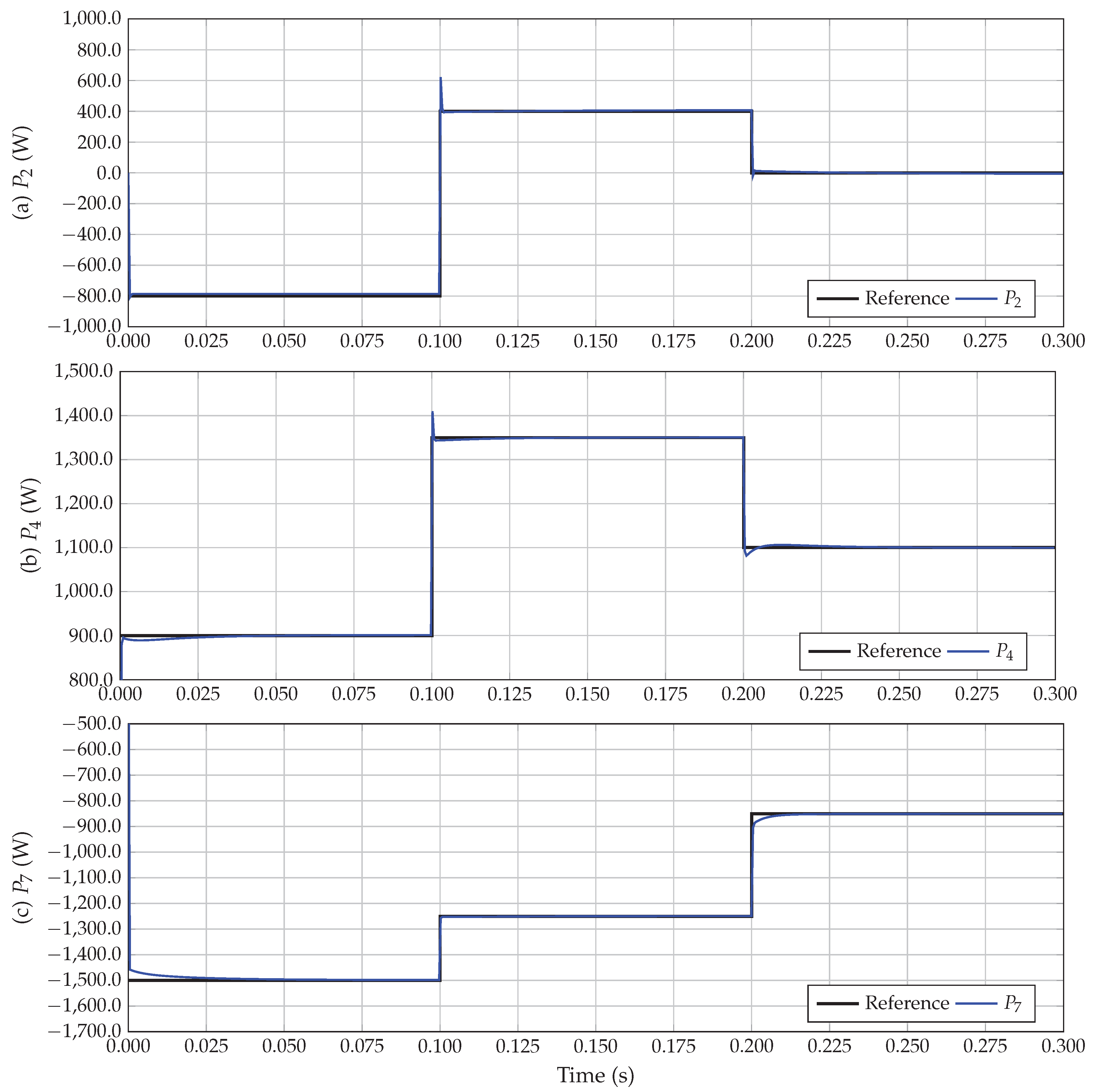
6.1. Tracking References
- ✓
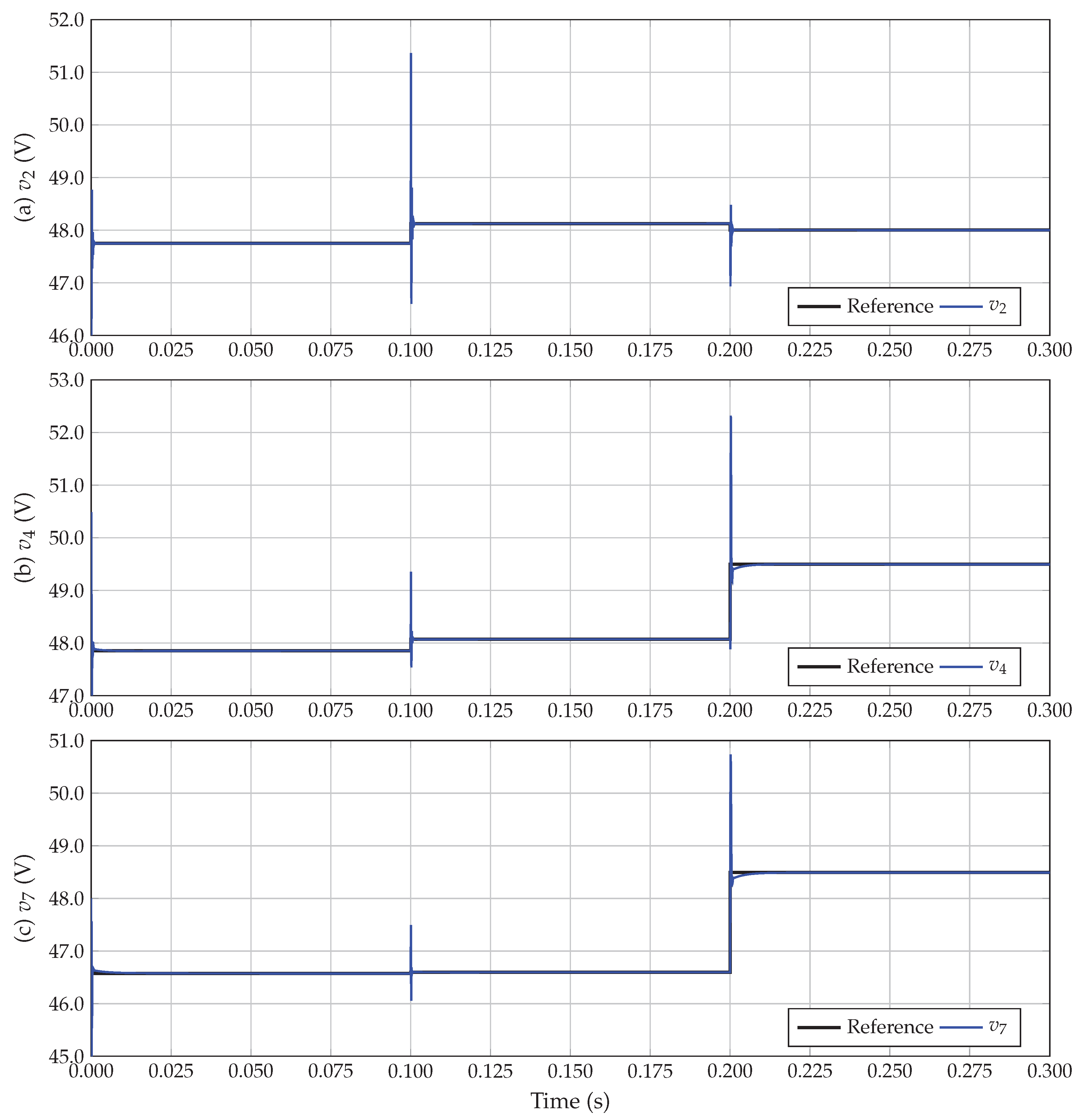
- Each of the voltage profiles of the network reaches its reference value within a settling time less than 10 ms, which is quite fast, considering that the constant power terminals vary their behavior every 100 ms.
- ✓
- The state variables exhibit an oscillatory behavior around their reference. In the case of node 2, the maximum overshot was about 51.38 V when the simulation time was 100 ms, which amounts to about 3.30 V with respect to the desired voltage reference, which is a typical tolerable voltage variation in a DC microgrid. The maximum values at nodes 4 and 7 were 52.46 V and 50.76 V respectively.
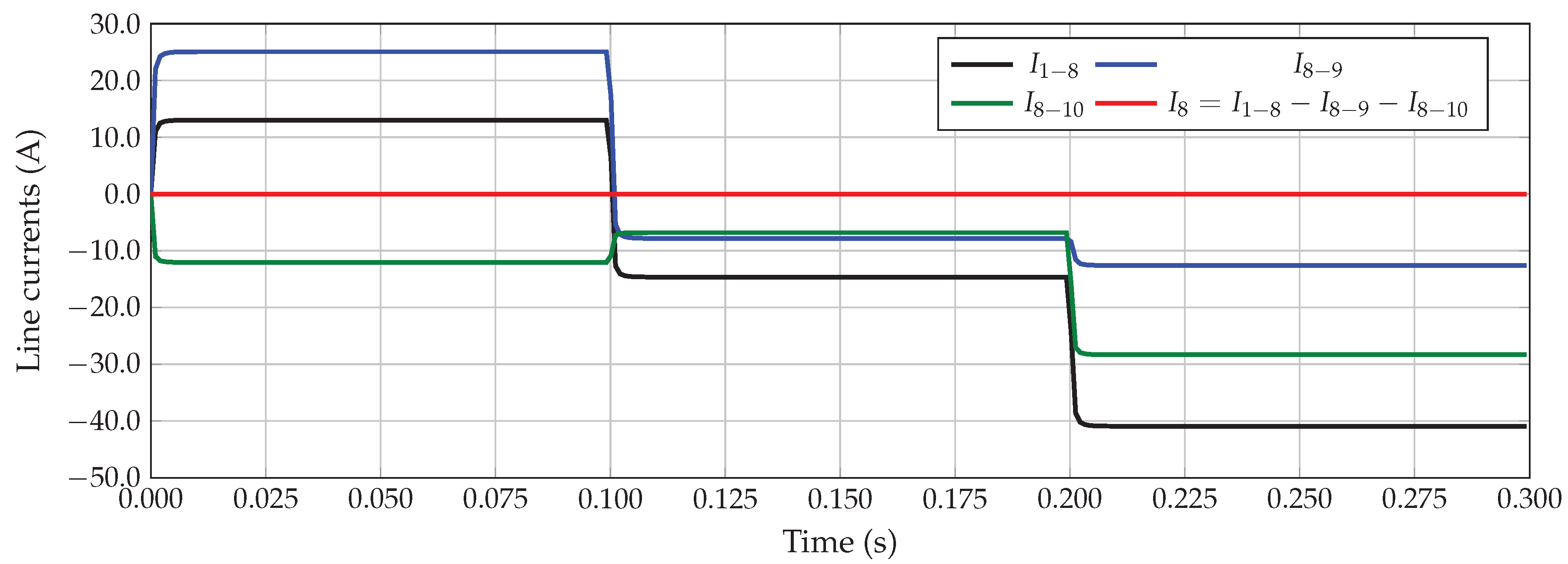
6.2. Current Behavior in a Step-Node
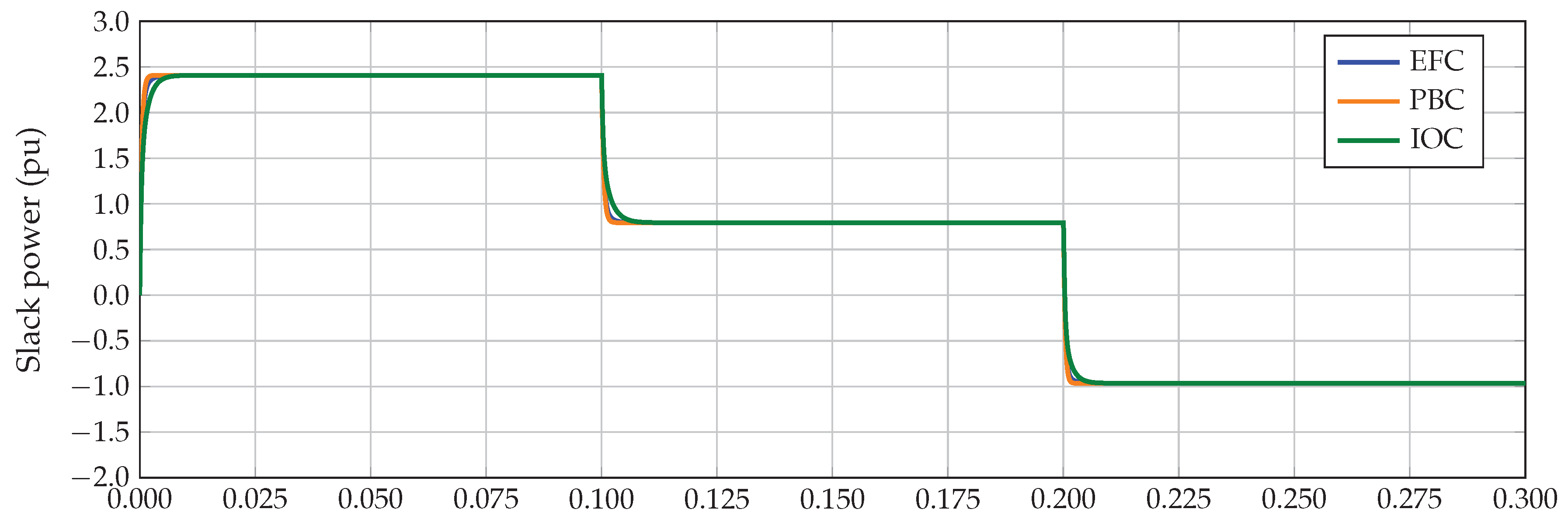
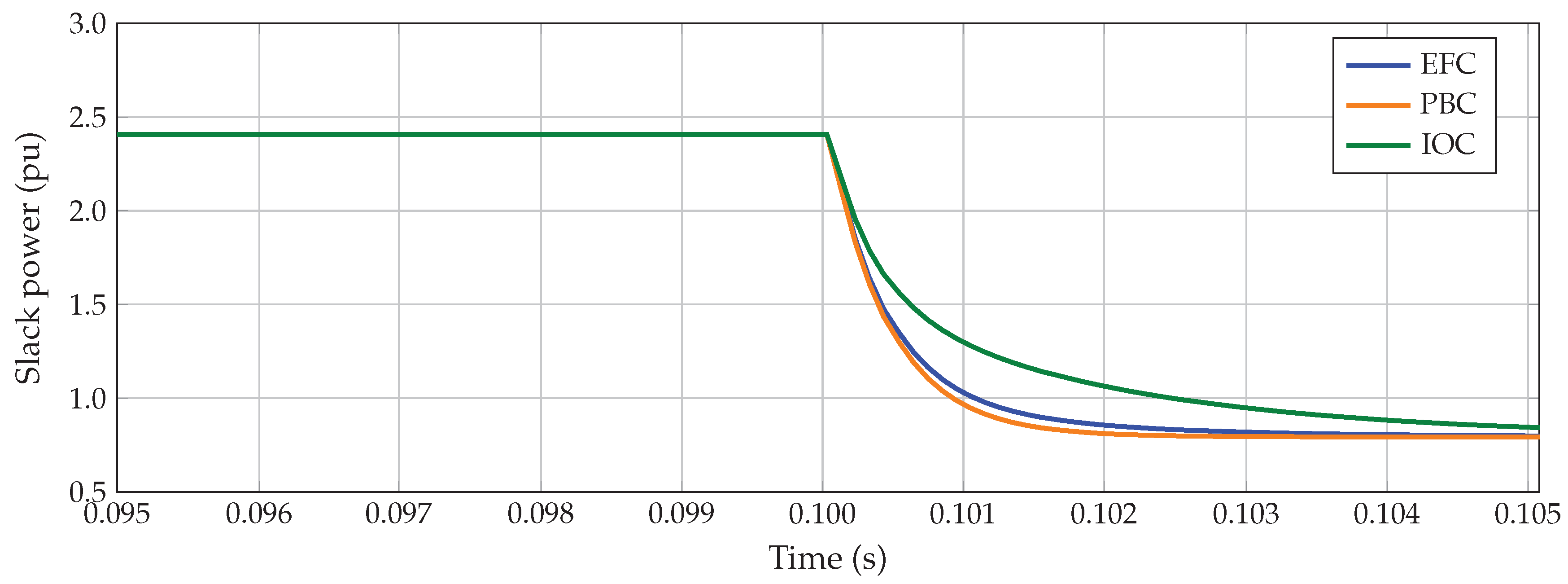
6.3. Comparison with Passivity and Inverse Optimal Controllers
6.4. General Commentaries
- ✓
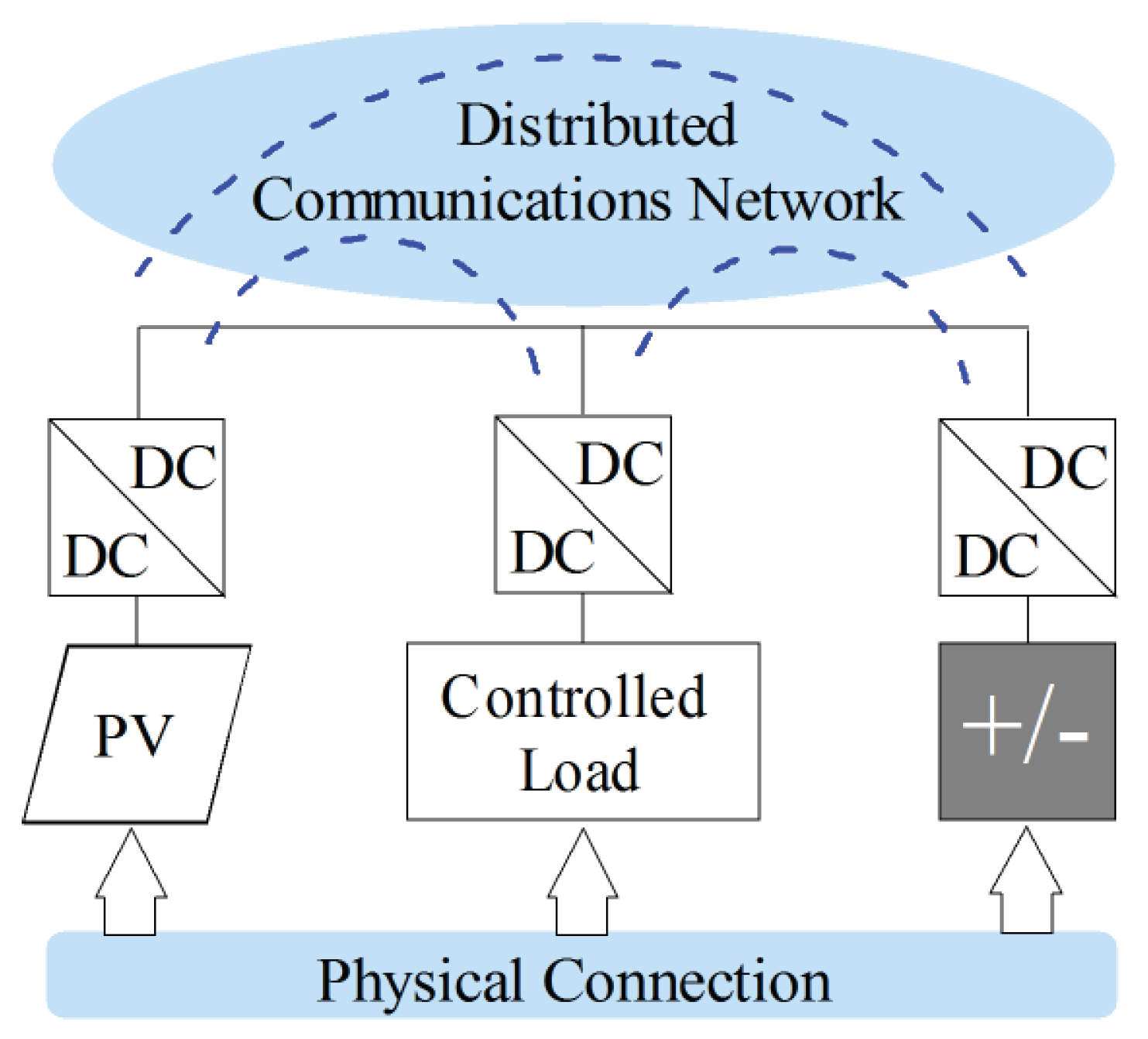
- The requirement of a complete communication structure that connects all the controllable constant power terminals and the slack source, which permits obtaining all the information so as to solve the recursive power flow problem using a centralized computation center. These information will be sent to the local controllers using the same communication system. For this reason, it is recommended to have a redundant communication system to ensure the correct operation of the proposed hierarchical controller.
- ✓
- The proposed hierarchical controller design assumes that the local current controllers in the power electronic converters that interface the loads are faster than the centralized controller since they can help with the stabilization of the grid in the case of sudden load variations or grid topology changes, even if the tertiary controller has not updated all the reference signals.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rodriguez, P.; Rouzbehi, K. Multi-terminal DC grids: Challenges and prospects. J. Mod. Power Syst. Clean Energy 2017, 5, 515–523. [Google Scholar] [CrossRef] [Green Version]
- Simiyu, P.; Xin, A.; Bitew, G.T.; Shahzad, M.; Kunyu, W.; Tuan, L.K. Review of the DC voltage coordinated control strategies for multi-terminal VSC-MVDC distribution network. J. Eng. 2018, 2019, 1462–1468. [Google Scholar] [CrossRef]
- Garces, A. Uniqueness of the power flow solutions in low voltage direct current grids. Elect. Power Syst. Res. 2017, 151, 149–153. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.F.; Garzón-Rivera, O.D.; Ocampo-Toro, J.A.; Ramos-Paja, C.A.; Rodriguez-Cabal, M.A. Metaheuristic Optimization Methods for Optimal Power Flow Analysis in DC Distribution Networks. Trans. Energy Syst. Eng. Appl. 2020, 1, 13–31. [Google Scholar] [CrossRef]
- Planas, E.; Andreu, J.; Gárate, J.I.; de Alegría, I.M.; Ibarra, E. AC and DC technology in microgrids: A review. Renew. Sustain. Energy Rev. 2015, 43, 726–749. [Google Scholar] [CrossRef]
- Savitha, K.P.; Kanakasabapathy, P. Multi-port DC-DC converter for DC microgrid applications. In Proceedings of the 2016 IEEE 6th International Conference on Power Systems (ICPS), New Delhi, India, 4–6 March 2016. [Google Scholar] [CrossRef]
- Singh, B.; Singh, B.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D. A Review of Three-Phase Improved Power Quality AC–DC Converters. IEEE Trans. Ind. Electron. 2004, 51, 641–660. [Google Scholar] [CrossRef]
- Mumtaz, F.; Yahaya, N.Z.; Meraj, S.T.; Singh, B.; Kannan, R.; Ibrahim, O. Review on non-isolated DC-DC converters and their control techniques for renewable energy applications. Ain Shams Eng. J. 2021, 12, 3747–3763. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.; Guerrero, J. DC Microgrids–Part I: A Review of Control Strategies and Stabilization Techniques. IEEE Trans. Power Electron. 2015, 1. [Google Scholar] [CrossRef] [Green Version]
- Shafiee, Q.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Hierarchical Control for Multiple DC-Microgrids Clusters. IEEE Trans. Energy Convers. 2014, 29, 922–933. [Google Scholar] [CrossRef] [Green Version]
- Murillo-Yarce, D.; Garcés-Ruiz, A.; Escobar-Mejía, A. Passivity-Based Control for DC-Microgrids with Constant Power Terminals in Island Mode Operation. Rev. Fac. Ing. Univ. Antioq. 2018, 86, 32–39. [Google Scholar] [CrossRef]
- Simiyu, P.; Xin, A.; Mouhammed, N.; Kunyu, W.; Gurti, J. Multi-terminal Medium Voltage DC Distribution Network Large-signal Stability Analysis. J. Elect. Eng. Technol. 2020, 15, 2099–2110. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Serra, F.M.; Angelo, C.H.D.; Hernández, J.C. Global Optimal Stabilization of MT-HVDC Systems: Inverse Optimal Control Approach. Electronics 2021, 10, 2819. [Google Scholar] [CrossRef]
- Papadimitriou, C.; Zountouridou, E.; Hatziargyriou, N. Review of hierarchical control in DC microgrids. Elect. Power Syst. Res. 2015, 122, 159–167. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Garces, A.; Serra, F.; Hernández, J.C. Stabilization of MT-HVDC grids via passivity-based control and convex optimization. Elect. Power Syst. Res. 2021, 196, 107273. [Google Scholar] [CrossRef]
- Tightiz, L.; Yang, H. A Comprehensive Review on IoT Protocols’ Features in Smart Grid Communication. Energies 2020, 13, 2762. [Google Scholar] [CrossRef]
- González, I.; Calderón, A.J.; Portalo, J.M. Innovative Multi-Layered Architecture for Heterogeneous Automation and Monitoring Systems: Application Case of a Photovoltaic Smart Microgrid. Sustainability 2021, 13, 2234. [Google Scholar] [CrossRef]
- Elmouatamid, A.; Ouladsine, R.; Bakhouya, M.; Kamoun, N.E.; Khaidar, M.; Zine-Dine, K. Review of Control and Energy Management Approaches in Micro-Grid Systems. Energies 2020, 14, 168. [Google Scholar] [CrossRef]
- Ashourloo, M.; Khorsandi, A.; Mokhtari, H. Stabilization of DC microgrids with constant-power loads by an active damping method. In Proceedings of the 4th Annual International Power Electronics, Drive Systems and Technologies Conference, Tehran, Iran, 13–14 February 2013. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.F.; Ramos-Paja, C.A.; Gonzalez-Montoya, D.; Alcalá, G.; Hernandez-Escobedo, Q. Energy Management in PV Based Microgrids Designed for the Universidad Nacional de Colombia. Sustainability 2020, 12, 1219. [Google Scholar] [CrossRef] [Green Version]
- Kwasinski, A.; Onwuchekwa, C.N. Dynamic Behavior and Stabilization of DC Microgrids With Instantaneous Constant-Power Loads. IEEE Trans. Power Electron. 2011, 26, 822–834. [Google Scholar] [CrossRef]
- Cardim, R.; Teixeira, M.C.; AssunçÃo, E.; Covacic, M.R. Design of state-derivative feedback controllers using a state feedback control design. IFAC Proc. Vol. 2007, 40, 22–27. [Google Scholar] [CrossRef]
- Li, P.; Wang, J.; Wu, F.; Li, H. Nonlinear controller based on state feedback linearization for series-compensated DFIG-based wind power plants to mitigate sub-synchronous control interaction. Int. Trans. Electric. Energy Syst. 2018, 29, e2682. [Google Scholar] [CrossRef] [Green Version]
- Cisneros, R.; Pirro, M.; Bergna, G.; Ortega, R.; Ippoliti, G.; Molinas, M. Global tracking passivity-based PI control of bilinear systems: Application to the interleaved boost and modular multilevel converters. Cont. Eng. Pract. 2015, 43, 109–119. [Google Scholar] [CrossRef]
- Garces, A. On the Convergence of Newton’s Method in Power Flow Studies for DC Microgrids. IEEE Trans. Power Syst. 2018, 33, 5770–5777. [Google Scholar] [CrossRef] [Green Version]
- Davoodi, E.; Babaei, E.; Mohammadi-Ivatloo, B.; Shafie-Khah, M.; Catalao, J.P.S. Multiobjective Optimal Power Flow Using a Semidefinite Programming-Based Model. IEEE Syst. J. 2021, 15, 158–169. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Garces, A. Sequential quadratic programming models for solving the OPF problem in DC grids. Elect. Power Syst. Res. 2019, 169, 18–23. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line | () | (H) | Line | () | (H) |
|---|---|---|---|---|---|
| 1–2 | 0.015 | 8.40 | 10–4 | 0.023 | 7.40 |
| 1–8 | 0.025 | 11.0 | 10–5 | 0.030 | 12.0 |
| 8–3 | 0.022 | 9.00 | 9–6 | 0.035 | 12.8 |
| 8–9 | 0.020 | 11.6 | 9–7 | 0.015 | 7.60 |
| 8–10 | 0.017 | 8.00 | — | — | — |
| Node i | (F) | (W) | (W) | (W) |
|---|---|---|---|---|
| 1 | 150 | 0 | 0 | 0 |
| 2 | 250 | −800 | 400 | 0 |
| 3 | 150 | −1200 | −1500 | −1000 |
| 4 | 220 | 900 | 1350 | 1100 |
| 5 | 250 | −500 | −750 | 300 |
| 6 | 200 | 1000 | 750 | 1500 |
| 7 | 100 | −1500 | −1250 | −850 |
| Node i | (pu) | (pu) | (pu) |
|---|---|---|---|
| 1 | 1 | 1 | 1 |
| 2 | 0.994764253626580 | 1.00259742007562 | 1 |
| 3 | 0.973238415687759 | 0.968970081003587 | 1.00092826199327 |
| 4 | 0.996925391824877 | 1.001496136245050 | 1.03114934372463 |
| 5 | 0.981278682600566 | 0.978054965927660 | 1.02431368520600 |
| 6 | 0.995569447311769 | 0.990646859924155 | 1.03767163982958 |
| 7 | 0.970245766697465 | 0.970762943642638 | 1.01023463026772 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montoya, O.D.; Serra, F.M.; Molina-Cabrera, A. Hierarchical Control for DC Microgrids Using an Exact Feedback Controller with Integral Action. Computers 2022, 11, 22. https://doi.org/10.3390/computers11020022
Montoya OD, Serra FM, Molina-Cabrera A. Hierarchical Control for DC Microgrids Using an Exact Feedback Controller with Integral Action. Computers. 2022; 11(2):22. https://doi.org/10.3390/computers11020022
Chicago/Turabian StyleMontoya, Oscar Danilo, Federico Martin Serra, and Alexander Molina-Cabrera. 2022. "Hierarchical Control for DC Microgrids Using an Exact Feedback Controller with Integral Action" Computers 11, no. 2: 22. https://doi.org/10.3390/computers11020022
APA StyleMontoya, O. D., Serra, F. M., & Molina-Cabrera, A. (2022). Hierarchical Control for DC Microgrids Using an Exact Feedback Controller with Integral Action. Computers, 11(2), 22. https://doi.org/10.3390/computers11020022