
Digital Twin in the Provision of Power Wheelchairs Context: Support for Technical Phases and Conceptual Model



1
NOVA School of Science and Technology, NOVA University Lisbon, 2829-516 Caparica, Portugal
2
Center of Technology and Systems, UNINOVA, 2829-516 Caparica, Portugal
*
Author to whom correspondence should be addressed.
Computers 2022, 11(11), 166; https://doi.org/10.3390/computers11110166
Submission received: 25 October 2022
/
Revised: 11 November 2022
/
Accepted: 15 November 2022
/
Published: 19 November 2022
(This article belongs to the Special Issue Computing, Electrical and Industrial Systems 2022)
Abstract
:Worldwide, many wheelchair users find it difficult to use or acquire a wheelchair that is appropriate for them, either because they do not have the necessary financial support or because they do not have access to trained healthcare professionals (HCPs), but they are essential for the correct provision of assistive products and user training. Consequently, although wheelchairs are designed to promote the well-being of many users, in many cases, they end up being abandoned or do not provide any benefit, with the chance of causing harm and potentially putting people in danger. This article proposes the creation and use of a Digital Twin (DT) of a Power Wheelchair (PWC) to promote the health of wheelchair users, by facilitating and improving the delivery of remote services by HCPs, as well as to include monitoring services to support timely maintenance. Specifically, a DT is a virtual counterpart that is seamlessly linked to a physical asset, both relying on data and information exchange for mirroring each other. Currently, DT is emerging and being applied to different areas as a promising approach to gather insightful data, which are shared between the physical and virtual worlds and facilitate the means to design, monitor, analyze, optimize, predict, and control physical entities. This article gives an overview of the Digital Twin concept, namely its definition, types, and properties, and seeks to synthesize the technologies and tools frequently used to enable Digital Twins; we also explain how a DT can be used in the technical phases of the PWC provision process and propose a conceptual model highlighting the use of an MDD approach benefiting from a Petri net formalism, which is presented to systematize the development of a PWC DT.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
The World Health Organization (WHO) states that more than one billion people have some form of disability, which represents about 15% of the global population [1]. In Portugal, according to the census of 2011, almost one million people are living with disabilities, with the highest prevalence related to mobility [2]. In general, for people who find difficulty in walking or moving around, operating a wheelchair can be a way to achieve autonomy and empowerment. To accommodate those who cannot use a manual wheelchair, a Power Wheelchair can be an option, which generally offers a wider range of features to suit the different needs and capabilities of the user. The main obstacles are that few countries have policies on assistive technology, and the wheelchair industry is currently limited and focuses on the high-income markets, leading to high economic investments by users and their families. Thus, those with lower economic resources end up relying on donations or charity services, which in most scenarios only provide low-quality or used products, unsuitable for the user in the context, with a lack of repair and follow-up mechanisms. In addition, in many low- and middle-income countries, access to trained healthcare professionals, such as therapists and assistive technology professionals (ATPs), is limited, but they are essential for the proper provision and support of PWCs [3]. Even with the COVID-19 pandemic situation, the scenario became worse, with a significant impact on funding budgets that concern access to PWCs, making face-to-face visits to clinics or homes difficult.
In this regard, the option of performing some parts of the provision of wheelchairs remotely, via telehealth and videoconferencing, has been accepted and encouraged [4]. In fact, it is better if users and healthcare professionals can benefit from the current technological developments triggered by Industry 4.0 (I4.0)—deeply focused on connectivity, real-time data acquisition and processing, and digitization—which became possible by the use of information and communication technologies, the Internet of Things, big data, artificial intelligence, and cloud computing, among others [5]. Related to this, Digital Twins are at the forefront of I4.0 [6], as they have brought a new way to cope with different challenges [7]. A DT is a virtual counterpart seamlessly linked to a real physical asset or prototype (e.g., product, service, or machine), both sharing the same properties, characteristics, and behavior by means of data and information [8]. DTs can be used in different contexts, including designing a product or virtual prototype; real-time monitoring and analysis of a real product quality; optimization of a production schedule in a factory, or intelligent control of a product; real product fault prediction and health management; etc. [9,10].
In view of this, the objective of this article is to propose the creation and use of a Digital Twin of a Power Wheelchair to facilitate the comprehensive delivery of services and support by healthcare professionals, promoting the physical and mental health of people who use wheelchairs; therefore, this article also contributes with an overview of the state-of-the-art in the representation and implementation of a Digital Twin. The following research question arose, with two more detailed questions, to better understand and solidify the main one:
- Main question: Is it possible to use a Digital Twin to mirror a Power Wheelchair, or part of it, to support the technical phases of the wheelchair provision process?
- How can a Digital Twin be used in this context?
- To what extent does a Digital Twin represent a real Power Wheelchair?
In Section 2, the Digital Twin concept is briefly introduced, including its elements, properties, types, and the current technologies and tools to enable it; Section 3 presents what the Power Wheelchair provision process is and what it is based on and explains how a Digital Twin can be used in such a context; in Section 4, a conceptual model of a Digital Twin of a Power Wheelchair is proposed, as well as a possible framework to enable it; Section 5 presents some discussion around the proposal; finally, in Section 6, the conclusions and future work are presented.
2. Digital Twin: Its Elements, Properties, Types, Enabling Technologies, and Tools
Initially called the Mirrored Spaces Model [8] or Information Mirroring Model, the current Digital Twin concept had its origin in 2002, when Grieves presented the “Conceptual Ideal for Product Lifecycle Management” by mirroring real-world systems in a virtual space, throughout their lifecycle, and based on input data from the physical world [11]. The term Digital Twin itself only appeared later in 2010, by NASA’s DT definition, focused on twinning real aerospace vehicles with different integrated sub-models, considering historical fleet data and sensor data updates of vehicles’ interactions with the real world [12]. The application of DT in this area continued with the USAF to support the design, maintenance, and optimization of aircraft [13,14,15], simulating their physical and mechanical properties and predicting fatigue or cracks in their structure, as well as to provide a forecast of the needs for future generations of vehicles [16].
Currently, in the literature, one can find a variety of proposals for the representation of Digital Twins; however, there are properties that each must necessarily consider and others that may depend on the application and the type of DT used; therefore, different approaches are also being proposed to realize this with frameworks based on different technologies [17].
2.1. Dimensions of a Digital Twin Model
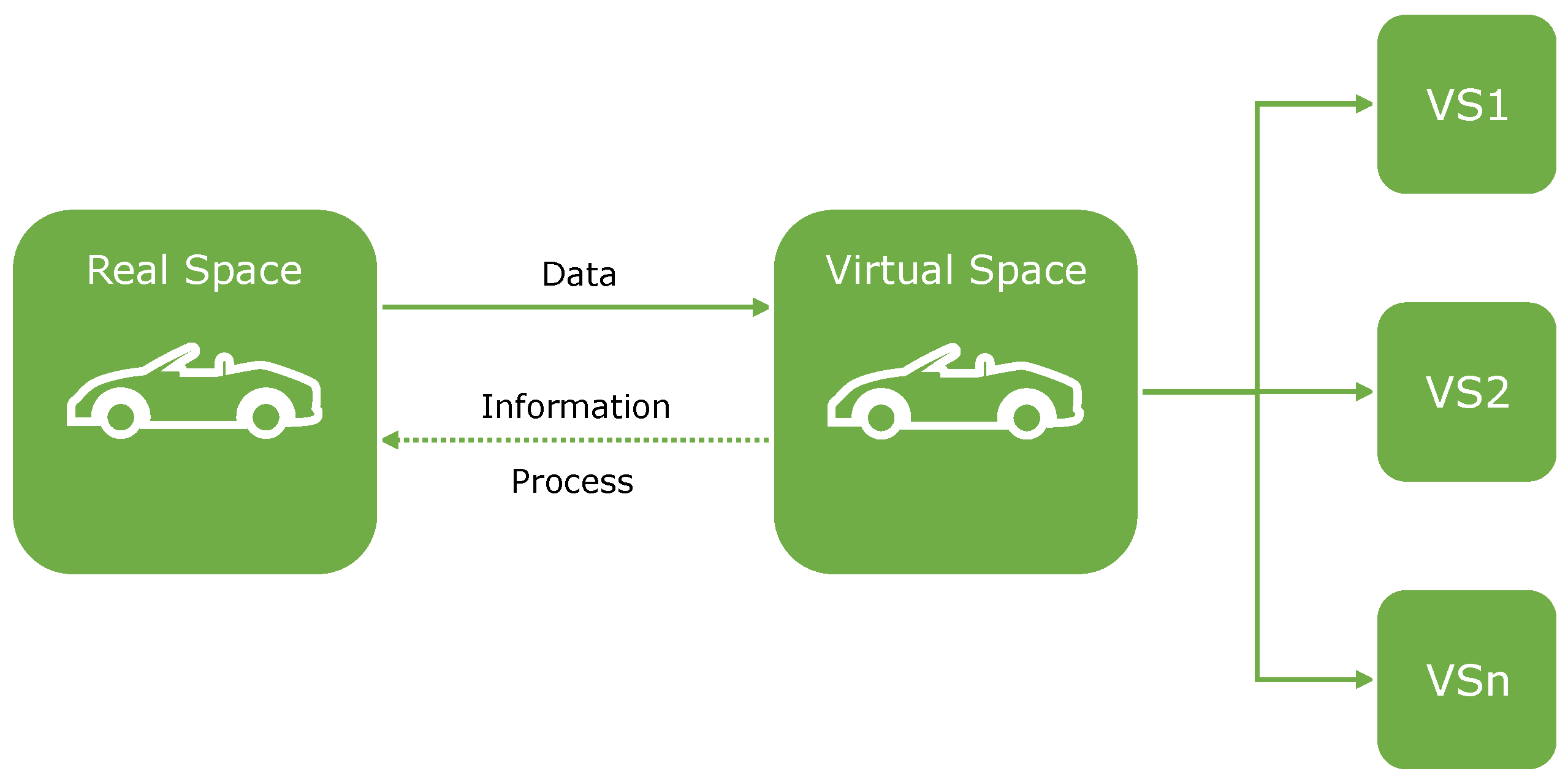
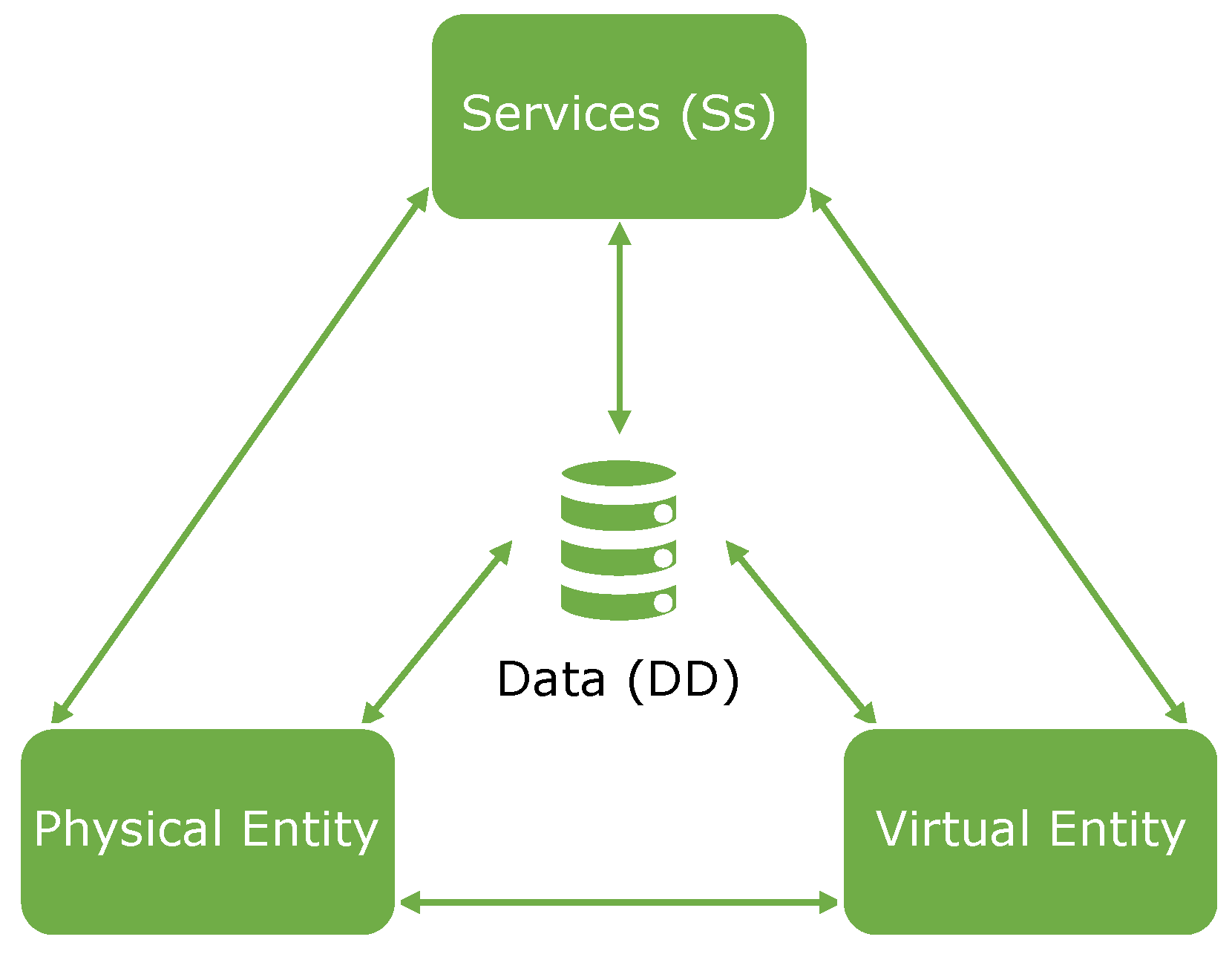
As Grieves was the first to introduce the concept [8], it can be said that the model he proposed, applied to product lifecycle management (PLM) (presented in Figure 1), served as the basis for subsequent representations of Digital Twins. Overall, three main elements can be identified: a real space, corresponding to the physical world where physical entities (PEs) are placed, such as sensors, devices, systems, and related infrastructures; a virtual space, where a virtual entity (VE) mirrors a PE, constraining it to a space where, unlike the real space, the cost of producing and manipulating copies of objects is almost zero (in Figure 1, the blocks VS1 to VSn represent the multiple virtual spaces that can be associated with a real space); and a bidirectional connection for data synchronization between spaces. Although this model has already been applied in other areas, it does not always accommodate the complexity of new applications, tools, technologies, etc. Figure 2 shows a particular proposal presented in [18] that highlights the presence of PEs and VEs interacting with services (Ss) and data (DD) using connections (Cn) that tie all the DT components. The DD were added to provide more accurate information from both entities, as well as Ss to improve user interaction with DT functions.
2.2. Properties and Types of Digital Twins
According to [19], the basic properties for a Digital Twin are related to how well it represents the original object, including its intended or predicted behavior. In short, the DT supports the representation of a PE through a VE if: (1) it guarantees the entanglement of entities; (2) the PE values are mapped in a timely manner to the VE; (3) the VE reproduces the relevant PE attributes in the context. These are the properties of entanglement, reflection, and representativeness; with just these three properties, a VE can behave like a PE, representing its state in one or more contexts. Other properties can add value to the DT, including replication, persistency, memorization, composability, accountability, augmentation, ownership, servitization, or predictability; the decision about whether to consider them depends on the application and type of DT. A DT can be classified according to various criteria [10,20,21,22,23,24,25,26]. Here are highlighted the DT types defined according to its creation time in the lifecycle, as well as according to its application; both criteria are considered to be of interest for the purpose of this article.
Two types of Digital Twins according to their position during the lifecycle [26] are: Digital Twin Prototype (DTP) or Digital Twin Instance (DTI). The DTP is a DT of a physical prototype to be used early in the lifecycle to support tests that are difficult to perform during traditional prototyping. When the DTP design is complete, the process moves to the design of the prototype, during which the DTP can be improved. In the realization of the PE, the DTP becomes a DTI, corresponding to the DT already defined; it lasts beyond the PE’s life. According to [22], a DT must offer at least one of the following values: analytics, control, or simulation. This underlies the definition of three other types of DT: Supervisory Digital Twin (SDT), Interactive Digital Twin (IDT), or Predictive Digital Twin (PDT). The SDT monitors the PE and collects data to support the perception of the PE attributes and their relationship to its performance. Thus, the SDT can be used either for monitoring or to support the design, maintenance, and training purposes. The IDT leads to a more reliable PE by diagnosing and controlling processes. To do this, the IDT establishes a real-time link between the data and algorithms for analysis, data mining, and decision-making. The PDT can help drive the PE by simulating or predicting the impact of the scenarios. For this, the PDT not only represents and reflects the PE, but also the rules and variabilities affecting its behavior.
2.3. Technologies and Tools to Enable the Digital Twin
A primary goal when enabling a Digital Twin is for the virtual entity to represent the physical entity as faithfully as possible. When the PE and VE are created at the same time, designers can model them with the same characteristics, properties, functions, and models; but when an unknown PE already exists, a preliminary step may consist of cognizing the physical world and acquiring data from it, using measurement technologies to measure the parameters and PE characteristics, including size, structure, tolerance, etc. Furthermore, as continuous synchronization between entities is required, some data need to be shared with the VE in near-real-time (e.g., torque, acceleration, or temperature) using advanced sensor technologies, IoT technologies, wireless technologies, etc.: WSN, LIDAR, GPS, magnetic position sensors, photo optic sensors, etc. Other data may be collected through APIs or web crawlers [27]. Ideally, the VE can also rely on the data to compute control actions and send instructions to the PE, when required; for this, power technologies, drive systems, control technologies, etc., can be part of the PE. Many tools used to support cognition and/or control of the physical world are machine vision software and vision-related software, such as: Cognex VisionPro, MVTec HALCON, National Instruments Vision Builder AI, Robot Operating System, and Samsara VS2; also, some related IoT software include: AWS IoT Core, GE Predix Platform, MindSphere, SAP Leonardo IoT, and ThingWorx.
To support the data flow and connectivity of all DT elements, transmission technologies are used together with appropriate network architectures, communication and security protocols, middleware platforms, etc. [28]. All data are then made available for further processing, analysis, and visualization using storage technologies [27] and ontologies for knowledge representation and management [28] (e.g., distributed file storage, NoSQL database, NewSQL database, or cloud storage); examples of the tools used are: Couchbase, MongoDB, Amazon DynamoDB, and Cassandra. Data processing helps to eliminate redundant and inconsistent data using data cleaning and transformation technologies [29], to later extract useful information using statistical methods, AI methods [27], and big data technologies, such as cloud, fog, and edge computing [30]. Data fusion is also suggested to help filter and correlate the processed data [27], which can then be used in functions provided by the DT (e.g., prediction, optimization, and validation), encapsulated in services to facilitate their use [29]. There are tools that offer ways to do it all: GE Predix Platform, RStudio, Spyder, MATLAB, RapidMiner Studio, RAPIDS, etc. Services are based on: virtualization, verification, validation, and simulation technologies [28]; platform-related technologies used to manage resource services, knowledge services, or application services; application interface technologies to enable user interaction with the services.
Mirroring a PE is a long process, where it is also intended that the VE can reproduce its characteristics, properties, and behaviors through different models. Section 4 builds on the aforementioned aspects, focusing on how to enable the VE.
2.4. Usage and Advantages of the Digital Twin
Around 2013, the concept of the Digital Twin began to appear, applied to manufacturing. In [31], it is proposed to use a DT of a real machine of a factory production system to simulate the health condition and improve the accessibility of the machine condition for factory managers. In spite of this, the use of a Digital Twin only saw a boom around 2016, a few years after the proposal of Industry 4.0 in 2013 [32]. Since then, the concept has expanded to different areas, in which new DT applications have emerged to support digitalization as a form of innovation, detecting problems, anticipating challenges, and increasing efficiency, and words such as aerospace vehicle, spacecraft, or aircraft have started to be replaced by system, machine, product, process, city, person, etc. [33,34,35].
Therefore, in general, a Digital Twin allows that things from the real world to be represented in the virtual world, by ensuring the transfer of data and information between a physical entity (PE) and its virtual entity (VE), which share the same properties, characteristics, and behaviors; changes that occur in both the PE and the VE lead directly to changes in the respective counterpart [10]. In short, using a DT has the following advantages [36,37,38]:
- It considers large amounts of data from different sources, characterizing a physical entity, which allows modeling the VE to mirror the PE for the duration of its lifecycle;
- The VE synchronizes with the PE and provides a comparison between real and simulated performance, which can be used to monitor and analyze the PE in real-time, supporting planning, design, maintenance, etc.;
- It can help to optimize the PE, using simulations, but also predictions, evaluating the impact of different scenarios—including unpredictable and undesirable ones—which can be verified and validated before they occur;
- It is capable of performing diagnostics and intelligent control over the PE, with the VE sending instructions when needed;
- It allows remote access for human interaction with the PE, just to mention the most relevant advantages.
As a result of its advantages, the DT can be applied in a variety of situations. In this article, the Digital Twin is proposed for digitalization and virtualization in the context of the provision and support of Power Wheelchairs. In this way, the idea of implementing and using Digital Twins of real wheelchairs is proposed, enabling new ways to assist wheelchair users, as well as healthcare professionals. So far, there is no evidence of Digital Twin application in this sector.
3. Digital Twin Applied in the Provision Process of Power Wheelchairs
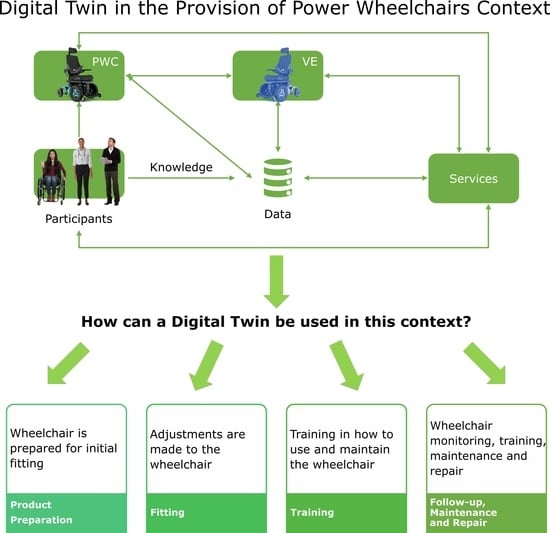
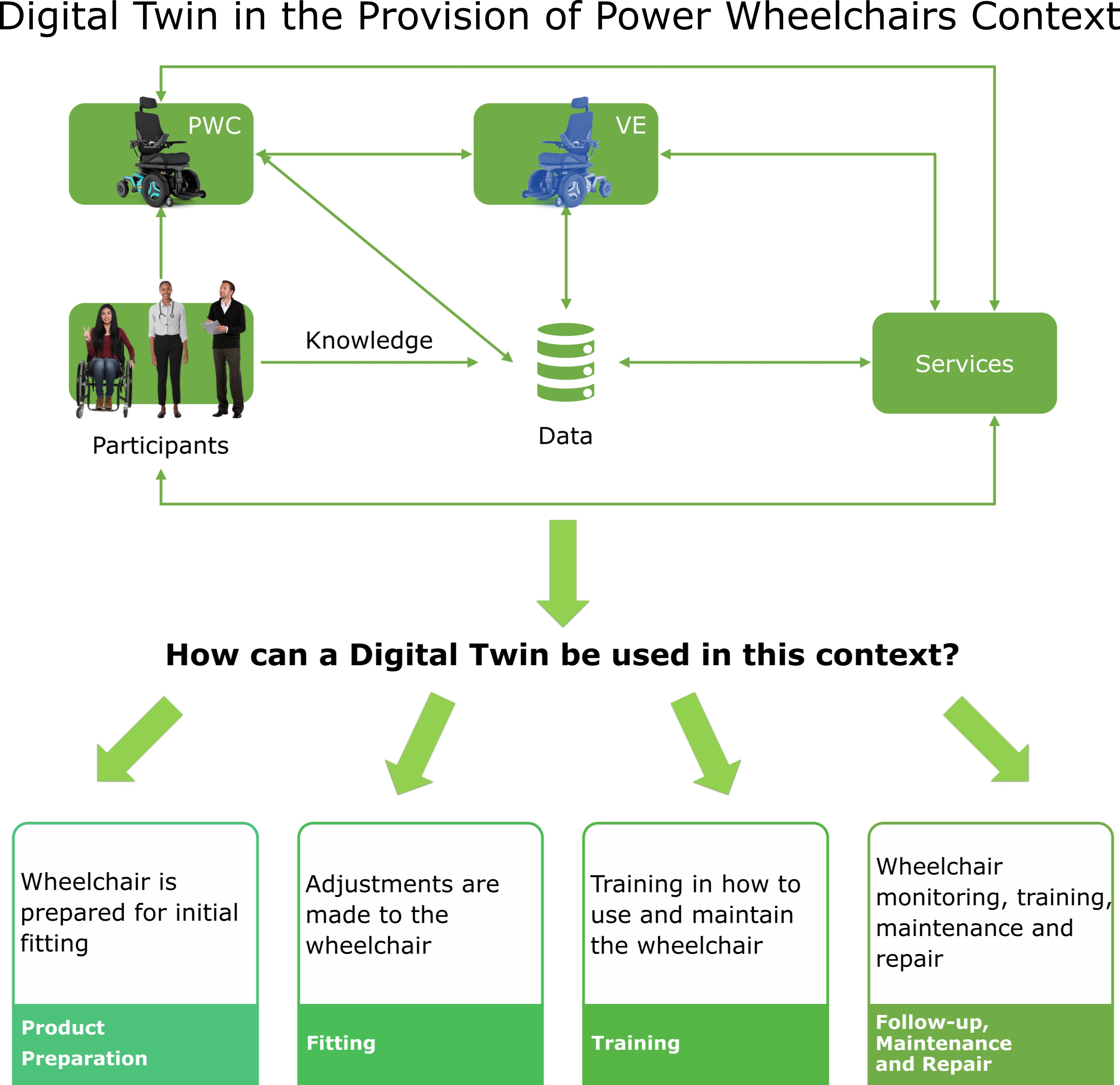
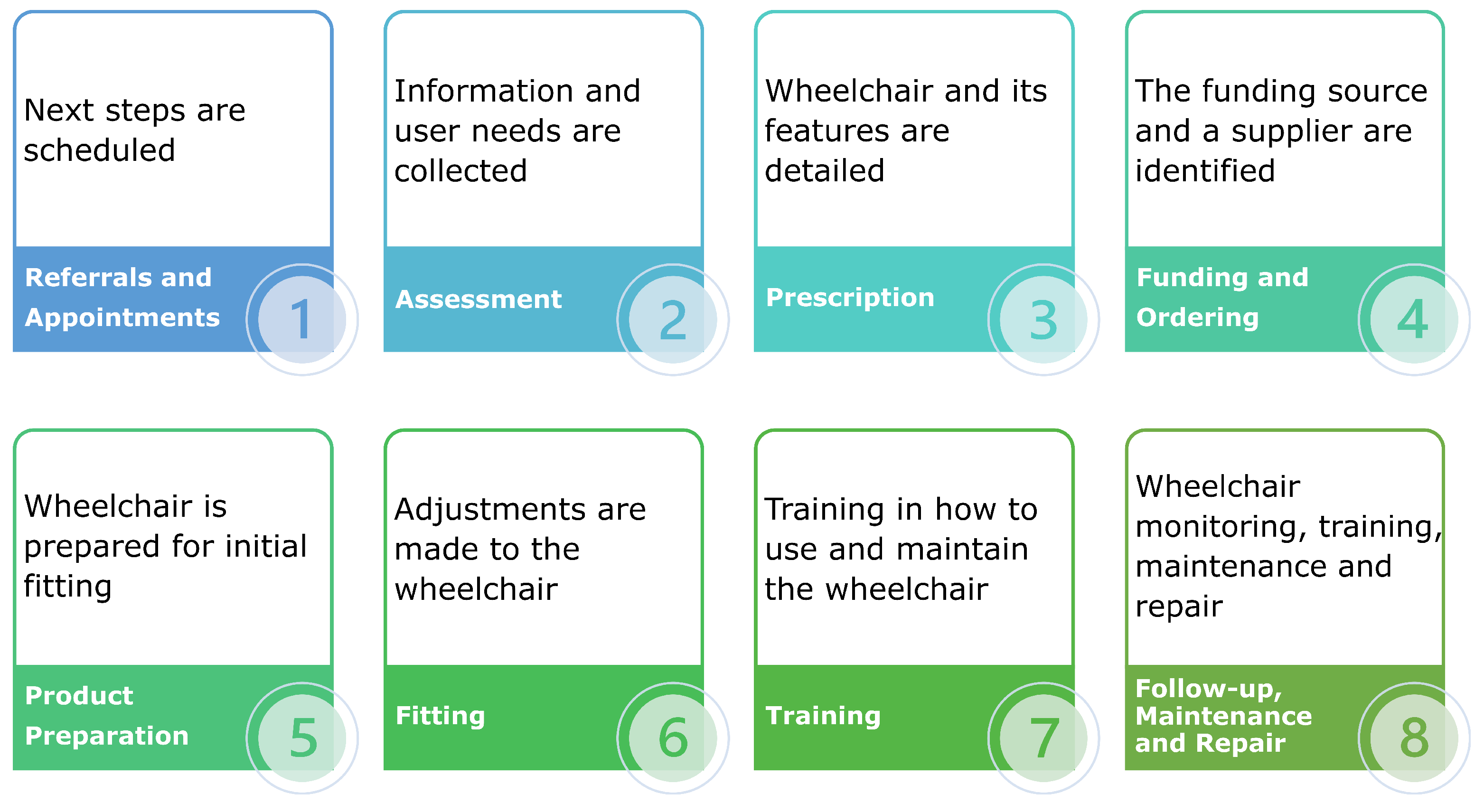
The provision of wheelchairs is a process based on a customer-centered approach so that users can obtain, maintain, and learn how to properly use their wheelchairs. Since the outbreak of COVID-19, the option to remotely carry out some parts of wheelchair provision is being valued, as [4,39]: a virtual meeting with a clinician may be a possibility for many PWC users to stay in their own homes, reducing the risk of exposure, or for users who have transportation challenges or who do not live close to a clinic; in some situations, observing customers using their wheelchairs at home can help determine real-world challenges that need to be overcome; HCPs and suppliers can perform assessments with one or more team members participating via videoconferencing. Still, telehealth does not yet cover important phases of wheelchair provision, such as when additional modifications and adjustments are required or HCPs are asked to provide the maintenance and repair of technical issues. To deal with this, the use of a Digital Twin is proposed in the context of Power Wheelchairs, namely to support the technical phases of the wheelchair provision process. Generally, the process follows a set of eight steps that the WHO has declared necessary to provide an adequate wheelchair [40]. Figure 3 presents each step, where a DT of a PWC can support the digitalization and virtualization of the product preparation, fitting, training, follow-up, maintenance, and repair steps.
Throughout the entire process, the involvement and assessment of different participants is necessary. Here, focus is given to the: (1) users and caregivers who use the wheelchair and are knowledgeable about their needs and what works best for them; (2) therapists who understand the ideal postures for PWC users and work on their rehabilitation; (3) certified assistive technology professionals who select the technology for PWCs and provide training and technical support in fit, maintenance, and repair. Thus, to answer the question “How can a Digital Twin be used in this context?”, emphasis is given to each of these groups in the technical phases 5 to 8.
- Product preparation and fitting: As part of product preparation and fitting, a PWC DT can help understand how the wheelchair works, support its fitting and adjustments, and assist in planning and testing of various scenarios. The DT can be used specifically by ATPs to justify, design, and validate new or existing PWC features, services, and parts, as well as simulating the health conditions of the PWC, in order to identify and eliminate the causes of problems and undesired situations. The PWC performance can also be predicted with the DT, including the occurrence of unforeseen scenarios.
- Training: The DT’s predictive capability can also be used during training to guide and anticipate potential risks. That is, the DT can guide users with personalized training services, based on their physiological, psychological, and contextual information, from users’ health data, therapists’ assessments, etc.; the DT can also analyze users’ usage data (e.g., location, time, and activity) in order to find out how the PWC is being used and offer accident prevention or mitigation based on this information.
- Follow-up, maintenance, and repair: The DT is able to gather real-time operational data from the PWC, giving insights into possible consequences of its use, showing users what is happening inside their PWCs. Therapists can also use it to guide and monitor users’ rehabilitation activities by tracing their usage patterns and reporting which PWC configurations and functionalities are used. In this way, the rehabilitation process can be better planned and PWC users can engage and follow along. Furthermore, the DT can trigger alerts during follow-up, maintenance, and repair so that a problem can be diagnosed and identify actions that can be taken to improve the performance of the PWC. With the DT, wheelchair repair can be facilitated through remote analysis and real-time PWC intervention.Here are some ways Digital Twins can be used to support the technical phases of wheelchairs provision. A section focused on the VE model and the framework for using the PWC DT follows.
4. Digital Twin of a Power Wheelchair
As is already possible to perceive, implementing and using a Digital Twin comprise a complex process. In this sense, a VE must be implemented with a set of goals and purposes, referring to the target context in which it will operate; it must, at least, represent the properties and behavior of the PE (in time and space) considering all the intended features to be analyzed; it must be part of a framework, involving multiple modeling processes, technologies, and tools to perform analysis, simulation, diagnosis, etc., on the PE. Figure 4 shows a conceptual model for a Digital Twin of a Power Wheelchair; the model is based on the five-dimensional DT concept model from [18] and was extended to consider the user element and its interactions.
While the DT abstracts the complexity of a PWC, offering specific services, users continue to interact with the PWC and contribute with different knowledge. As a result, we will not only use PWC data, but also information from users and experts. It is intended to obtain parameters and characteristics concerning the brand and model of the PWC, such as its mass and the overall dimensions of the components. Furthermore, it is intended to obtain PWC values in real-time (or near to): the position will be obtained by using a GPS; an inertial measurement unit (IMU), which consists of gyroscopes, accelerometers, and magnetometers, will be used to measure the angular rate and provide the acceleration of the wheelchair; using a battery management system (BMS) device, which uses temperature sensors, humidity sensors, electrical current monitoring sensors, etc., data will be obtained about the battery’s state; an anti-lock braking system (ABS) that uses speed sensors will magnetically read the rotational speed of each wheel; blind spot sensors will be added to provide data regarding location and proximity of obstacles; electrical current monitoring sensors will measure the current in existing actuators to monitor the possible seating functions used by users or to measure the signal from the control interface used by the user. Additionally, physiological, psychological, and contextual information from users, as well as data from therapists’ evaluations will be considered; depending on the disability, it will be useful to monitor data from ventilators, feeding pumps, suction equipment, etc. Finally, the Digital Twin itself will also consider its data history, as well as the data generated by the service element.
The proposed model is to be a Predictive Digital Twin, which can have both SDT and IDT characteristics, allowing:
- Acquisition and analysis of operational data from the PWC in real-time;
- Understanding of the functioning of the PWC, or part of it;
- Evaluation of the PWC’s behavior in the future;
- Planning and testing the impact of the main usage scenarios;
- Improvement of part of the PWC, identifying and eliminating errors;
- Justification and validation of feature changes;
- Diagnosis of problems and identification of actions to improve the PWC’s performance;
- Augmentation of control systems to adjust or optimize the PWC parameters (locally or remotely) and more.
There are two possible scenarios for using this DT in lifecycles: one in which the PWC, or part of it, does not yet exist and is conceived of at the same time as its VE; another where it exists, but the VE has to be implemented. As a result, the PWC DT can also be a DTI to adapt PWCs that come with predefined functionalities or a DTP to add them to those that do not [10].
The properties that characterize the proposed model, besides the mandatory ones—entanglement, replication, and representativeness—are: augmentation, servitization, persistency, and composability [19]. The augmentation is so that the PWC can be modified, updated, and improved by the VE. In other words, the VE can be functionally augmented and offer new features. The servitization is in some way related to the augmentation property, because, if the VE can provide new functionalities and access to the PWC data through software resources, tools, and interfaces, it can offer new services to its users. Persistency is for the VE to be able to compensate for real-world limitations that may restrict the functioning and use of the PWC. In the case of a PWC malfunction, the VE should be considered to report anything about the wheelchair, as well as synchronize it to a known and acceptable state. Finally, composability refers to the VE being able to represent only a subpart of the PWC and an aggregation of VEs representing the PWC itself.
In fact, the PWC can be seen as an aggregation of the parts that make it up (e.g., joystick module, power module, or seating module), and each one can have its VE; in other words, the VE in Figure 4 corresponds to a series of sub-models integrated to mimic specific parts of the PWC. The use of different sub-models makes it easier to have a realistic digital model, helping the VE to mimic various aspects of the PWC, in time and space. Because of that, the proposal considers a model-driven development (MDD) approach that stands out for supporting all stages of systems’ development (e.g., specification, verification, simulation, and implementation) using models as the primary artifact [41]. With MDD, it is intended to ensure a high level of specification abstraction while attaining the level of detail required for a DT; it has the ability to [42]:
- Enable hardware and software design;
- Eliminate errors early in development;
- Facilitate testing with automated verification and validation techniques;
- Support automatic code generation for target platforms.
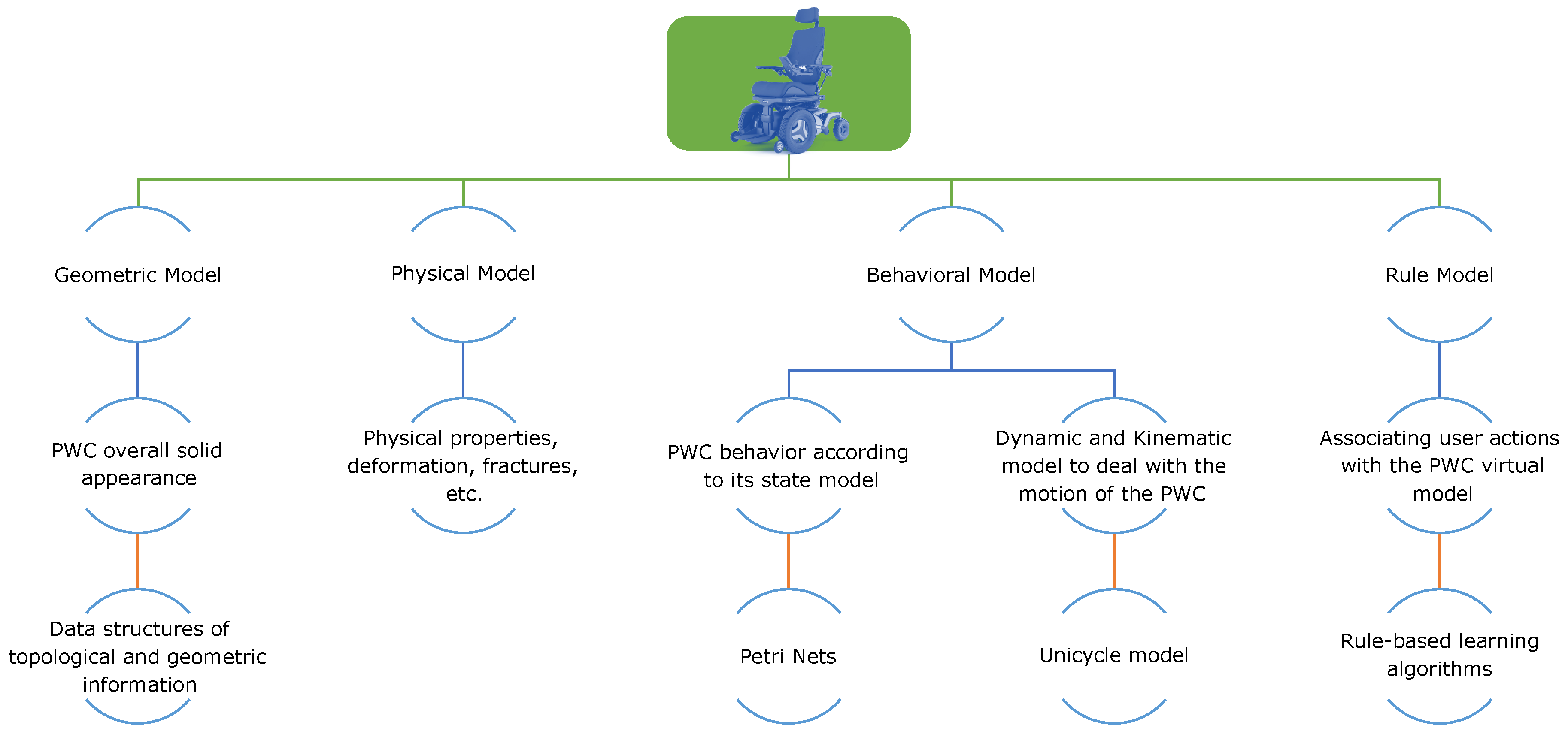
Besides, MDD supports various modeling formalisms, allowing combining several technologies and tools that are essential to model the VE. For example, as the VE needs to be as identical as possible to the PWC (or part of it) and evolve with it over time, model evolution technologies are needed to drive the VE update; as models’ accuracy directly affects the efficacy of the VE, the models must be subjected to validation and verification tools. Therefore, the DT model in Figure 4 represents a real PWC through a VE, considering four types of models, as shown in Figure 5 [27]: geometric, physical, behavioral, and rule model.
The geometric model will represent the global solid appearance of the PWC based on data structures of topological and geometric information, used to feed software for three-dimensional modeling, computer-aided design, or virtual reality. Some frequently used 3D modeling software are: SketchUp, Onshape, Solid Edge, and Blender; also, some CAD tools are: DraftSight, AutoCAD, and SolidWorks. In addition, the physical model will reflect the physical properties of the PWC, and multiphysics simulation technologies can be used to conduct parameter change simulations and define VE attributes and constraints. Examples of tools that may be used are: Ansys Discovery, SimScale, SolidWorks, ALGOR, and Simulink.
Then, the behavioral model will describe the PWC’s behaviors according to its state model, dynamic model, and kinematic model. In particular, the state model will be specified using the Petri net (PN) formalism [43], suitable for the development of complex systems. Similar to other graphical modeling formalisms, the Petri net formalism allows for an intuitive description of systems, with system requirements specified using models that can be analyzed based on formal methods. In particular, some of the advantages of using Petri net models are that they [44,45]: (1) enable the modeling and visualization of behaviors with parallelism, concurrency, synchronization, and resource sharing; (2) have precise syntax and execution semantics that support the verification and validation of systems, as well as their implementation, using design automation tools; (3) support bottom-up and top-down modeling strategies, associated with the composition and decomposition of models, respectively; (4) present numerous theoretical results, as they have been widely studied and proposed in diverse areas, just to mention the most relevant advantages.
Currently, different types of Petri nets are used, ranging from low-level Petri nets [46] to high-level Petri nets [47], which can be autonomous or non-autonomous. Since non-autonomous Petri nets are dependent on physical characteristics, in such a way that it is possible to condition the evolution of the PN using external signals and/or time, a new class of non-autonomous high-level Petri nets will be created based on IOPT nets [46], colored Petri nets [47], and DS-Pnets [48]. These classes have the potential to reduce the complexity of data modeling and data processing; also, the use of Petri nets can provide evidence on the representation of requirements for the VE state models through their verification and validation, using automation tools [49,50,51] supported by MDD. Concretely, the verification will check if a VE and (possibly) its PWC meet a certain specification; in turn, the validation will check whether it behaves as expected, e.g., if the VE represents the PWC (or part) as intended.
Regarding the dynamic model and kinematic model, they will be described through mathematical equations. While kinematics describes the trajectory of the wheelchair depending on its velocities (linear and angular), dynamics complements it, accounting for the forces applied to the system, which can actually be used to describe these velocities. There are different ways of modeling a wheelchair, for example considering a four-wheel model [52,53], a bicycle model [54,55], or a unicycle model [56,57]. A unicycle model is usually used to model robots with some forward speed and no instantaneous lateral motion. The fact is that, in the case of a PWC, high speed values can be very disturbing and cause problems in the user’s postural stability. Because of this, Part 6 of ISO 7176 [58] specifies test methods to determine the maximum speed of a PWC, with a maximum nominal speed not exceeding 15 km/h (approximately 4.17 m/s); on the market, generally, maximum speeds are around 12 km/h (approximately 3.33 m/s). Therefore, initially, a unicycle model will be considered to deal with the motion of the PWC.
Finally, the rule model will provide the VE a means to describe patterns and make predictions; this is an advantage as the VE will not only represent and reflect the PWC, but also the rules and variabilities that affect its behavior; for example, the rule model will allow associated PWC users’ actions with the virtual model of the PWC. This will be based on rule-based learning algorithms under the unsupervised branch of machine learning [59]. In this way, it is believed that a DT can represent a real Power Wheelchair and may answer the question: To what extent does the Digital Twin represent a real Power Wheelchair?.
5. Discussion
Today, several types of wheelchairs and associated devices are offered on the market to deal with different problems and difficulty in mobility and make users able to interact with the environment. There are wheelchairs to tilt, to stand, to move on all terrain, on the beach, to practice sports, to bathe, and more [60]. In particular, Power Wheelchairs are a good alternative for people with low no trunk control, sitting upright with static stability. Users often use a joystick to control the position and direction of the wheelchair, but other controls can be used, such as head, chin, tongue, and sip-n-puff controls. In some cases, seat functions and other devices are available to help users with postural impairments and low mobility to accommodate themselves and prevent injuries and other complications. Therefore, Power Wheelchairs are significantly different from manual wheelchairs as they are more customizable and have features and services along with them; they are designed to meet specific individual needs, assisting users in performing day-to-day activities, allowing for augmentation and replacement of functions (e.g., sophisticated powered tilt and recline functions or power elevating leg rests and foot platforms) or devices (e.g., specialty joystick controls).
However, many users have difficulty using a wheelchair, even for daily activities. They need to have continue access to HCPs for proper provision, training, and follow-up, being sometimes limited. Additionally, many users suffer injuries from trips or falls near stairs, ramps, or curbs [61]; other injuries occur in the scenario of wheelchair breakdown. In this sense, innovations and proposals for wheelchairs revolve around technological advances; examples are: alternative control devices, assessment and prescribing tools, simulators and training applications, or mobility aids. Some examples of recent technology include: LUCI, which is a smart technology accessory that is mounted on a PWC to allow the user to navigate with greater safety and independence [62]; blind spot sensor systems used to easily provide obstacle detection and avoidance [63]; a fleet management system to provide access to valuable data and analysis of customers’ wheelchairs and improve diagnostic [64]. None of these proposals use Digital Twins.
Therefore, as already mentioned, the creation and use of Digital Twins of real wheelchairs are proposed, enabling new services to assist wheelchair users, as well as their HCPs, therapists, and ATPs. With this in mind, it was already proposed to use a model-driven development approach combining a new modeling formalism language (the extended Petri net class) for the use of Digital Twins in the context of the provision of wheelchairs, focusing on the technical phases of the process. Therefore, it is planned to accomplish the following four goals:
- Design, verify, validate, and deploy Digital Twins using multi-domain modeling tools in a model-driven development approach;
- Model the state models of Digital Twins using an extended Petri net class;
- Implement a framework for the use of Digital Twins in a service-oriented architecture for monitoring, simulation, diagnosis, prognosis, and control of the system in the physical world;
- Define scenarios for the application of Digital Twins in real wheelchairs.
It is expected that the DT will contribute to promote people’s health and physical well-being and safety and be able to deal with the adversities pointed out, highlighting the following:
- Promote the well-being and safety of wheelchair users, supporting personalized services (e.g., user training services);
- Increase the engagement of wheelchair users;
- Support real wheelchairs’ adaptation and repair, increasing their safety and reliability, while reducing maintenance costs;
- Offer new mechanisms for ATPs to assist more people, facilitating access to wheelchair analysis and remote intervention with real-time control over physical twins, if necessary;
- Help therapists plan, guide, and monitor users’ rehabilitation activities.
6. Conclusions and Future Work
This article is an extension of [65] and presents a proposal for the creation and use of a Digital Twin of a Power Wheelchair, enabling new services for wheelchairs users, as well as their HCPs. As far as we known, this is a novel aspect, as there is no other proposal to improve and transform the provision and support of wheelchairs. In addition to that, the proposed conceptual model focuses on a virtual entity that is intended to be based on a model-driven development approach benefiting from a high-level Petri net formalism. So far, there is no evidence of its application in this sector. Implementing and using a Digital Twin is a complex and challenging process. On the one hand, the VE needs to be gradually updated to match the PE, which requires understanding and perception of the physical world; on the other hand, after digitizing the PE, different analyses can be made and used, for example to predict and identify opportunities and risks, without incurring any cost; ensure that a new design in the future meets the desired requirements; or to affect PE evolution in the physical world.
Several ways of using DTs in the context of provision and support of PWCs were pointed out. The proposal of a conceptual model identifies the model-driven development approach to combine different sub-models and allow the specification, verification, simulation, and implementation of the virtual entity in the DT. In particular, emphasis was given to a new extended Petri net formalism that will aim to model the VE state model, to answer the question: Is it possible to use a Digital Twin to mirror a Power Wheelchair, or part of it, to support the technical phases of the wheelchair provision process?. A high-level and non-autonomous Petri net class with deterministic execution semantics, potentially constrained by external signals and events, priorities, and time dependencies, can be used in a model-driven development approach to model a virtual entity, as well as the physical entity (in some cases) and ensure the properties required for a Digital Twin to be deployed and used for real-time monitoring, prediction, and remote control. Associated with a framework that supports the cognition of real wheelchairs, users, and the environment, the Digital Twin can be used in the provision process to justify, design, and validate new or existing features and parts of the PWC. The DT can also simulate PWC conditions to determine and eliminate undesired situations, predict its performance and the occurrence of unforeseen scenarios, increase user engagement, and assist therapists in monitoring rehabilitation activities. If the framework facilitates analysis and remote intervention, the DT can trigger alerts, aid diagnosis, and improve the PWC’s performance over the real PWC.
The validation of the proposed hypothesis will be performed considering different methods, such as [66], and case studies that will be elaborated in the field of Power Wheelchair systems, benefiting from the interaction with therapists and users, who can speak to several adaptation requirements, with collaboration with Associação de Paralisia Cerebral Almada Seixal (APCAS) The final prototype should verify the following indicators:
- Whether a VE model of a Power Wheelchair, or part of it, can be modeled using a non-autonomous high-level Petri net class, in particular;
- Whether a DT can be used in the context of the provision of Power Wheelchairs;
- Whether a DT, modeled in an MDD approach and based on a non-autonomous high-level Petri net class, can be implemented in a framework for Power Wheelchairs’ provision and support, in particular if the framework and the concept of the DT is adding value to the wheelchair provision process.
As future work, it is intended to analyze different descriptions of VE dynamic and kinematic models while associating them with a geometric and physical model; in parallel, the new formalism of Petri net will begin to be defined; it is intended to call for the participation of users, therapists, and ATPs to assess their opinions, comments, and recommendations on the values of the proposed DT.
Author Contributions
Conceptualization, C.L.-O., F.M. and L.G.; methodology, C.L.-O., F.M. and L.G.; investigation, C.L.-O.; writing—original draft preparation, C.L.-O.; writing—review and editing, C.L.-O., F.M. and L.G.; supervision, F.M. and L.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially financed by the Portuguese Agency “Fundação para a Ciência e a Tecnologia” (FCT), in the framework of Project UIDB/00066/2020, and under the PhD scholarship with the reference 2020.08462.BD, through national funds from the “Ministério da Ciência, Tecnologia e Ensino Superior” (MCTES).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of the data; in the writing of the manuscript; nor in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| AI | Artificial intelligence |
| API | Application programming interface |
| ATP | Assistive technology professional |
| Cn | Connections |
| DD | Data |
| DT | Digital Twin |
| GPS | Global Positioning System |
| HCP | Healthcare professional |
| I4.0 | Industry 4.0 |
| IoT | Internet of Things |
| LiDAR | Light detection and ranging |
| MDD | Model-driven development |
| NASA | National Aeronautics and Space Administration |
| PE | Physical entity |
| PLM | Product lifecycle management |
| PWC | Power Wheelchair |
| Ss | Services |
| USAF | United States Air Force |
| VE | Virtual Entity |
| WHO | World Health Organization |
| WSN | Wireless sensor network |
References
- World Health Organization; World Bank. World Report on Disability 2011. Available online: https://apps.who.int/iris/handle/10665/44575 (accessed on 8 March 2021).
- Instituto Nacional de Estatística. Censos 2011. Available online: https://censos.ine.pt/xportal/xmain?xpid=CENSOS&xpgid=censos2011_apresentacao (accessed on 6 April 2021).
- World Health Organization. Assistive Technology. Available online: https://www.who.int/news-room/fact-sheets/detail/assistive-technology (accessed on 9 March 2021).
- Watanabe, L. H.R. 2168 Includes Telehealth Options for CRT Clinicians. Available online: https://mobilitymgmt.com/articles/2021/03/29/hr-2168-telehealth-clinicians.aspx (accessed on 19 February 2022).
- Oztemel, E.; Gursev, S. Literature review of Industry 4.0 and related technologies. J. Intell. Manuf. 2020, 31, 127–182. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, H.; Liu, A.; Nee, A.Y.C. Digital Twin in Industry: State-of-the-Art. IEEE Trans. Ind. Inform. 2019, 15, 2405–2415. [Google Scholar] [CrossRef]
- Fuller, A.; Fan, Z.; Day, C.; Barlow, C. Digital Twin: Enabling Technologies, Challenges and Open Research. IEEE Access 2020, 8, 108952–108971. [Google Scholar] [CrossRef]
- Grieves, M.W. Product lifecycle management: The new paradigm for enterprises. Int. J. Prod. Dev. 2005, 2, 71–84. [Google Scholar] [CrossRef]
- Wagg, D.J.; Worden, K.; Barthorpe, R.J.; Gardner, P. Digital Twins: State-of-the-art and future directions for modeling and simulation in engineering dynamics applications. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 2020, 6. [Google Scholar] [CrossRef]
- Singh, M.; Fuenmayor, E.; Hinchy, E.P.; Qiao, Y.; Murray, N.; Devine, D. Digital Twin: Origin to Future. Appl. Syst. Innov. 2021, 4, 36. [Google Scholar] [CrossRef]
- Grieves, M.; Vickers, J. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems. In Transdisciplinary Perspectives on Complex Systems; Kahlen, F.J., Flumerfelt, S., Alves, A., Eds.; Springer: Cham, Switzerland, 2017; pp. 85–113. [Google Scholar] [CrossRef]
- Shafto, M.; Conroy, M.; Doyle, R.; Glaessgen, E.; Kemp, C.; LeMoigne, J.; Wang, L. DRAFT Modeling, Simulation, Information Technology & Processing Roadmap, Technology Area 11. Available online: https://www.nasa.gov/pdf/501321main_TA11-MSITP-DRAFT-Nov2010-A1.pdf (accessed on 7 March 2022).
- Tuegel, E.J.; Ingraffea, A.R.; Eason, T.G.; Spottswood, S.M. Reengineering Aircraft Structural Life Prediction Using a Digital Twin. Int. J. Aerosp. Eng. 2011, 2011, 154798. [Google Scholar] [CrossRef] [Green Version]
- Gockel, B.T.; Tudor, A.W.; Brandyberry, M.D.; Penmetsa, R.C.; Tuegel, E.J. Challenges with Structural Life Forecasting Using Realistic Mission Profiles. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2012; American Institute of Aeronautics and Astronautics: Honolulu, Hawaii, 2012. [Google Scholar] [CrossRef]
- Tuegel, E. The Airframe Digital Twin: Some Challenges to Realization. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2012; American Institute of Aeronautics and Astronautics: Honolulu, Hawaii, 2012. [Google Scholar] [CrossRef]
- Glaessgen, E.; Stargel, D. The Digital Twin Paradigm for Future NASA and U.S. Air Force Vehicles. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2012; American Institute of Aeronautics and Astronautics: Honolulu, Hawaii, 2012. [Google Scholar] [CrossRef] [Green Version]
- Psarommatis, F.; May, G. A literature review and design methodology for Digital Twins in the era of zero defect manufacturing. Int. J. Prod. Res. 2022, 1–21. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, M.; Nee, A. Five-Dimension Digital Twin Modeling and Its Key Technologies. In Digital Twin Driven Smart Manufacturing; Tao, F., Zhang, M., Nee, A., Eds.; Elsevier: Amsterdam, The Netherlands, 2019; Chapter 3; pp. 63–81. [Google Scholar] [CrossRef]
- Minerva, R.; Lee, G.M.; Crespi, N. Digital Twin in the IoT Context: A Survey on Technical Features, Scenarios, and Architectural Models. Proc. IEEE 2020, 108, 1785–1824. [Google Scholar] [CrossRef]
- Aitken, A. Industry 4.0: Demystifying Digital Twins. Available online: https://www.lanner.com/en-us/solutions/digital-twin.html (accessed on 19 February 2022).
- Grieves, M. The Evolution of the Digital Twin: A Visionary Product Concept Brings Big Changes for the Future. IM+io Best & Next Practices aus Digitalisierung. 2018, pp. 66–69. Available online: https://www.im-io.de/worldwide/the-evolution-of-the-digital-twin/ (accessed on 28 September 2021).
- High Value Manufacturing Catapult Visualization. Feasibility of an Immersive Digital Twin. Available online: https://www.amrc.co.uk/files/document/219/1536919984_HVM_CATAPULT_DIGITAL_TWIN_DL.pdf (accessed on 2 March 2022).
- Kritzinger, W.; Karner, M.; Traar, G.; Henjes, J.; Sihn, W. Digital Twin in manufacturing: A categorical literature review and classification. IFAC-PapersOnLine 2018, 51, 1016–1022. [Google Scholar] [CrossRef]
- Barricelli, B.R.; Casiraghi, E.; Fogli, D. A Survey on Digital Twin: Definitions, Characteristics, Applications, and Design Implications. IEEE Access 2019, 7, 167653–167671. [Google Scholar] [CrossRef]
- Biesinger, F.; Weyrich, M. The Facets of Digital Twins in Production and the Automotive Industry. In Proceedings of the 2019 23rd International Conference on Mechatronics Technology (ICMT), Salerno, Italy, 23–26 October 2019. [Google Scholar] [CrossRef]
- Jones, D.; Snider, C.; Nassehi, A.; Yon, J.; Hicks, B. Characterising the Digital Twin: A systematic literature review. CIRP J. Manuf. Sci. Technol. 2020, 29 Pt A, 36–52. [Google Scholar] [CrossRef]
- Qi, Q.; Tao, F.; Hu, T.; Anwer, N.; Liu, A.; Wei, Y.; Wang, L.; Nee, A. Enabling technologies and tools for Digital Twin. J. Manuf. Syst. 2021, 58 Pt B, 3–21. [Google Scholar] [CrossRef]
- Lim, K.Y.H.; Zheng, P.; Chen, C.H. A state-of-the-Art Survey of Digital Twin: Techniques, Engineering Product Lifecycle Management and Business Innovation Perspectives. J. Intell. Manuf. 2020, 31, 1313–1337. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, M.; Nee, A. Background and Concept of Digital Twin. In Digital Twin Driven Smart Manufacturing; Tao, F., Zhang, M., Nee, A., Eds.; Elsevier: Amsterdam, The Netherlands, 2019; Chapter 1; pp. 3–28. [Google Scholar] [CrossRef]
- Pires, F.; Cachada, A.; Barbosa, J.; Moreira, A.P.; Leitão, P. Digital Twin in Industry 4.0: Technologies, Applications and Challenges. In Proceedings of the 2019 IEEE 17th International Conference on Industrial Informatics (INDIN), Helsinki, Finland, 22–25 July 2019; pp. 721–726. [Google Scholar] [CrossRef]
- Lee, J.; Lapira, E.; Bagheri, B.; Kao, H.A. Recent advances and trends in predictive manufacturing systems in big data environment. Manuf. Lett. 2013, 1, 38–41. [Google Scholar] [CrossRef]
- Kagermann, H.; Wahlster, W.; Helbig, J. Recommendations for Implementing the Strategic Initiative INDUSTRIE 4.0. Available online: https://www.din.de/blob/76902/e8cac883f42bf28536e7e8165993f1fd/recommendations-for-implementing-industry-4-0-data.pdf (accessed on 2 March 2022).
- Hinduja, H.; Kekkar, S.; Chourasia, S.; Chakrapani, H.B. Industry 4.0: Digital Twin and its Industrial Applications. Int. J. Sci. Eng. Technol. 2020, 8. Available online: https://www.researchgate.net/publication/343713676_Industry_40_Digital_Twin_and_its_Industrial_Applications (accessed on 10 May 2021).
- Yablochnikov, E.I.; Chukichev, A.V.; Timofeeva, O.S.; Abyshev, O.A.; Abaev, G.E.; Colombo, A.W. Development of an industrial cyber-physical platform for small series production using Digital Twins. Philos. Trans. R. Soc. A. 2021, 379. [Google Scholar] [CrossRef]
- Pires, F.; Ahmad, B.; Moreira, A.P.; Leitão, P. Digital Twin based What-if Simulation for Energy Management. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), Victoria, BC, Canada, 10–12 May 2021; pp. 309–314. [Google Scholar] [CrossRef]
- Redelinghuys, A.; Basson, A.; Kruger, K. A Six-Layer Digital Twin Architecture for a Manufacturing Cell. In Service Orientation in Holonic and Multi-Agent Manufacturing. SOHOMA 2018. Studies in Computational Intelligence; Borangiu, T., Trentesaux, D., Thomas, A., Cavalieri, S., Eds.; Springer: Cham, Switzerland, 2019; Volume 803, pp. 412–423. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, A.; Wang, W. A Framework for an Indoor Safety Management System Based on Digital Twin. Sensors 2020, 20, 5771. [Google Scholar] [CrossRef]
- Liu, M.; Fang, S.; Dong, H.; Xu, C. Review of Digital Twin about concepts, technologies, and industrial applications. J. Manuf. Syst. 2021, 58 Pt B, 346–361. [Google Scholar] [CrossRef]
- Watanabe, L. Telehealth & Remote Services Are More Than Just a Pandemic Stopgap. Available online: https://mobilitymgmt.com/articles/2021/02/17/editor-note-telehealth-remote-services.aspx (accessed on 19 February 2022).
- Armstrong, W.; Borg, J.; Krizack, M.; Lindsley, A.; Mines, K.; Pearlman, J.; Reisinger, K.; Sheldon, S. Guidelines on the Provision of Manual Wheelchairs in Less Resourced Settings; Technical Report; World Health Organization: Geneva, Switzerland, 2008. [Google Scholar] [CrossRef]
- Meyers, B.; Gadeyne, K.; Oakes, B.J.; Bernaerts, M.; Vangheluwe, H.; Denil, J. A Model-Driven Engineering Framework to Support the Functional Safety Process. In Proceedings of the 2019 ACM/IEEE 22nd International Conference on Model Driven Engineering Languages and Systems Companion (MODELS-C), Munich, Germany, 15–20 September 2019; pp. 619–623. [Google Scholar] [CrossRef]
- Kleidermacher, D.; Kleidermacher, M. Secure Embedded Software Development. In Embedded Systems Security; Kleidermacher, D., Kleidermacher, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2012; Chapter 3; pp. 93–208. [Google Scholar] [CrossRef]
- Murata, T. Petri Nets: Properties, Analysis and Applications. Proc. IEEE 1989, 77, 541–580. [Google Scholar] [CrossRef]
- Girault, C.; Valk, R. Petri Nets for Systems Engineering—A Guide to Modeling, Verification, and Applications, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar] [CrossRef]
- David, R.; Alla, H. Discrete, Continuous, and Hybrid Petri Nets, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Gomes, L.; Barros, J.P. Refining IOPT Petri Nets class for embedded system controller modeling. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 4720–4725. [Google Scholar] [CrossRef]
- Jensen, K.; Kristensen, L.M. Colored Petri nets: A Graphical Language for Formal Modeling and Validation of Concurrent Systems. Commun. ACM 2015, 58, 61–70. [Google Scholar] [CrossRef]
- Pereira, F.; Gomes, L. The IOPT-Flow modeling framework applied to Power Electronics controllers. IEEE Trans. Ind. Electron. 2017, 64, 2363–2372. [Google Scholar] [CrossRef]
- Jensen, K.; Kristensen, L.M.; Wells, L. Coloured Petri Nets and CPN Tools for modelling and validation of concurrent systems. Int. J. Softw. Tools Technol. Transf. 2007, 9, 213–254. [Google Scholar] [CrossRef]
- Pereira, F.; Moutinho, F.; Gomes, L. IOPT-Tools—Towards cloud design automation of digital controllers with Petri nets. In Proceedings of the 2014 International Conference on Mechatronics and Control (ICMC), Jinzhou, China, 3–5 July 2014; pp. 2414–2419. [Google Scholar] [CrossRef]
- Wisniewski, R.; Bazydlo, G.; Gomes, L.; Costa, A.; Wojnakowski, M. Analysis and Design Automation of Cyber-Physical System with Hippo and IOPT-Tools. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 5843–5848. [Google Scholar] [CrossRef]
- Chénier, F.; Bigras, P.; Aissaoui, R. A new dynamic model of the manual wheelchair for straight and curvilinear propulsion. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–5. [Google Scholar] [CrossRef]
- De La Cruz, C.; Bastos, T.F.; Carelli, R. Adaptive motion control law of a robotic wheelchair. Control. Eng. Pract. 2011, 19, 113–125. [Google Scholar] [CrossRef]
- Palmqvist, M.I. Model Predictive Control for Autonomous Driving of a Truck. Master’s Thesis, KTH Royal Institute of Technology School of Electrical Engineering, Stockholm, Sweden, 2016. Available online: https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A930995&dswid=-6957 (accessed on 3 November 2021).
- Zhu, B.; Piao, Q.; Zhao, J.; Guo, L. Integrated chassis control for vehicle rollover prevention with neural network time-to-rollover warning metrics. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef] [Green Version]
- Ceravolo, E.; Gabellone, M.; Farina, M.; Bascetta, L.; Matteucci, M. Model Predictive Control of an autonomous wheelchair. In IFAC-PapersOnLine—20th IFAC World Congress; Dochain, D., Henrion, D., Peaucelle, D., Eds.; IFAC Hosting by Elsevier Ltd.: Laxenburg, Austria, 2017; Volume 50, pp. 9821–9826. [Google Scholar] [CrossRef]
- Bardaro, G.; Bascetta, L.; Ceravolo, E.; Farina, M.; Gabellone, M.; Matteucci, M. MPC-based control architecture of an autonomous wheelchair for indoor environments. Control. Eng. Pract. 2018, 78, 160–174. [Google Scholar] [CrossRef]
- International Organization for Standardization. ISO 7176-6:2018-Wheelchairs-Part 6: Determination of Maximum Speed of Electrically Powered Wheelchairs. Available online: https://www.iso.org/standard/70589.html (accessed on 14 March 2022).
- Fürnkranz, J.; Kliegr, T. A Brief Overview of Rule Learning. In Rule Technologies: Foundations, Tools, and Applications. RuleML 2015; Lecture Notes in Computer Science; Bassiliades, N., Gottlob, G., Sadri, F., Paschke, A., Roman, D., Eds.; Springer: Cham, Switzerland, 2015; Volume 9202, pp. 54–69. [Google Scholar] [CrossRef]
- Mobility Management. List of Wheelchairs Companies and Vendors in the Mobility Management Buyer’s Guide. Available online: https://buyersguide.mobilitymgmt.com/category/wheelchairs (accessed on 18 March 2022).
- Sung, J.; Trace, Y.; Peterson, E.W.; Sosnoff, J.J.; Rice, L.A. Falls among full-time wheelchair users with spinal cord injury and multiple sclerosis: A comparison of characteristics of fallers and circumstances of falls. Disabil. Rehabil. 2017, 41, 389–395. [Google Scholar] [CrossRef]
- LUCI. LUCI | Mobility. Available online: https://luci.com (accessed on 17 March 2022).
- Braze Mobility. Braze Mobility—Blind Spot Sensors for Wheelchairs. Available online: https://brazemobility.com (accessed on 17 March 2022).
- Permobil. Permobil Connect Fleet Management. Available online: https://www.permobil.com/en-us/products/power-wheelchairs/functions/fleet-management (accessed on 18 March 2022).
- Lagartinho-Oliveira, C.; Moutinho, F.; Gomes, L. Towards Digital Twin in the Context of Power Wheelchairs Provision and Support. In Technological Innovation for Digitalization and Virtualization. DoCEIS 2022. IFIP Advances in Information and Communication Technology; Camarinha-Matos, L.M., Ed.; Springer International Publishing: Cham, Switzerland, 2022; pp. 95–102. [Google Scholar] [CrossRef]
- Psarommatis, F.; May, G. A standardized approach for measuring the performance and flexibility of Digital Twins. Int. J. Prod. Res. 2022, 1–16. [Google Scholar] [CrossRef]
Figure 1.
Conceptual ideal for PLM (adapted from [8]).
Figure 1.
Conceptual ideal for PLM (adapted from [8]).

Figure 2.
Five-dimensional DT concept model (adapted from [18]).
Figure 2.
Five-dimensional DT concept model (adapted from [18]).
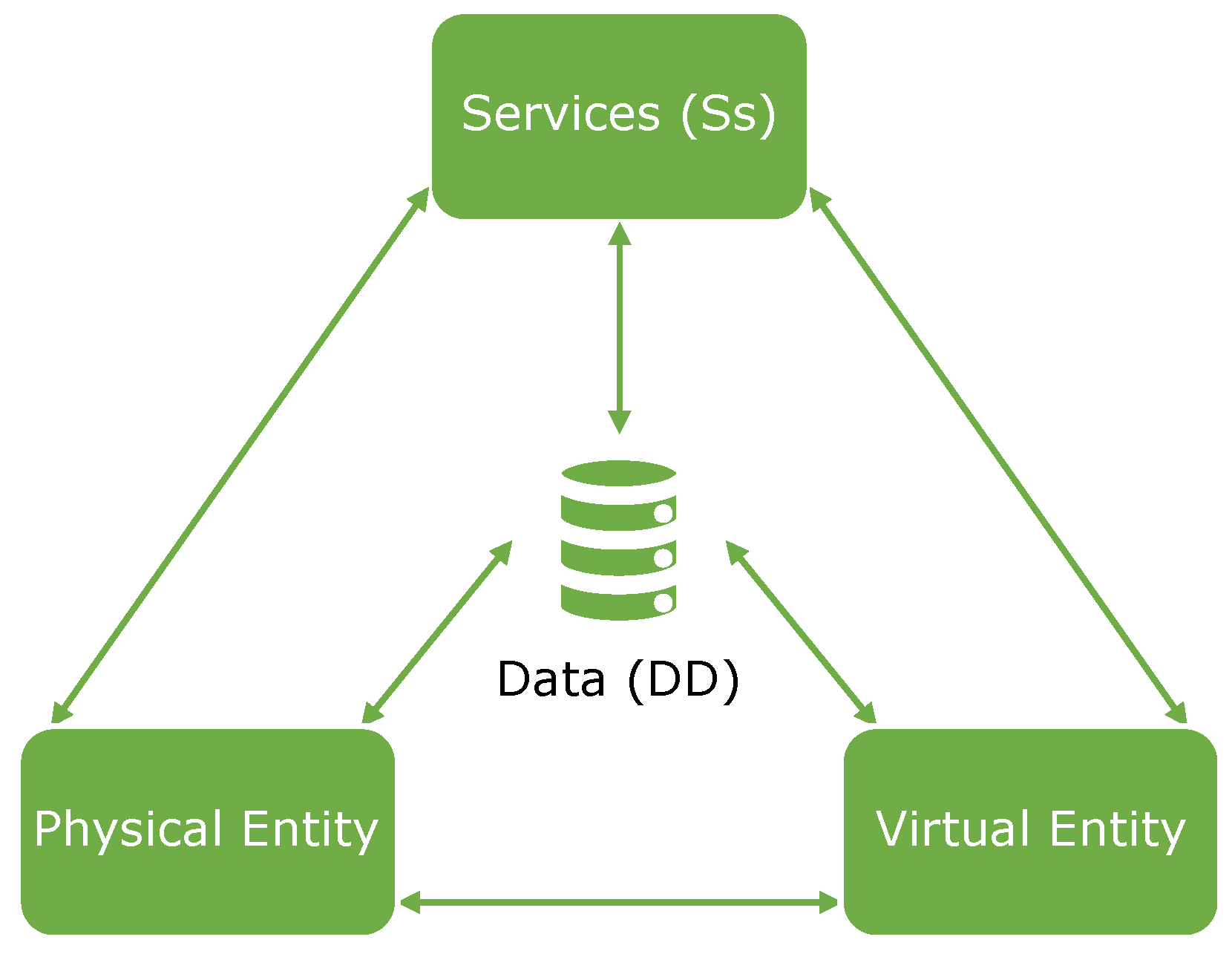
Figure 3.
Steps in the wheelchair provision process.
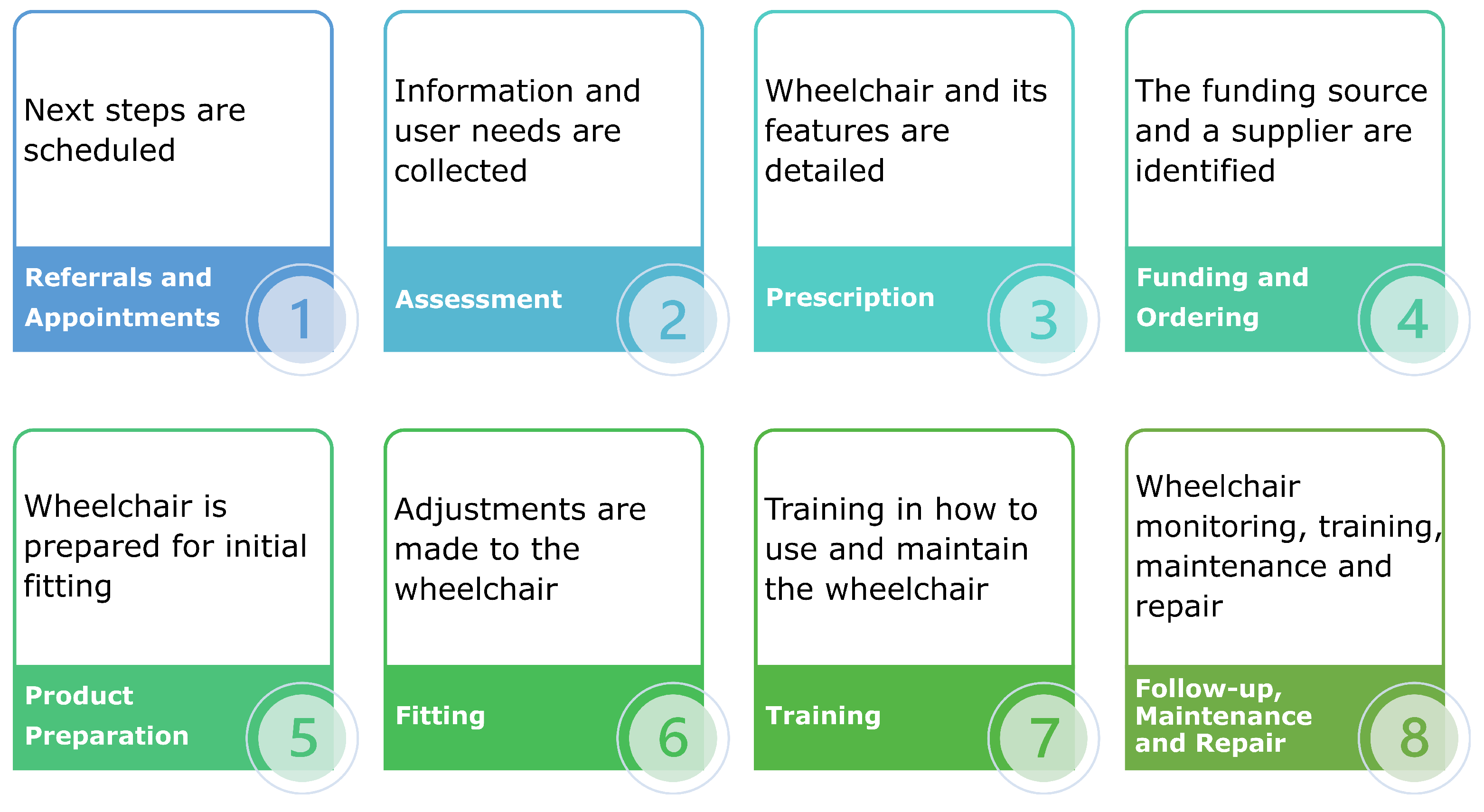
Figure 4.
Proposed conceptual model for a Power Wheelchair DT.
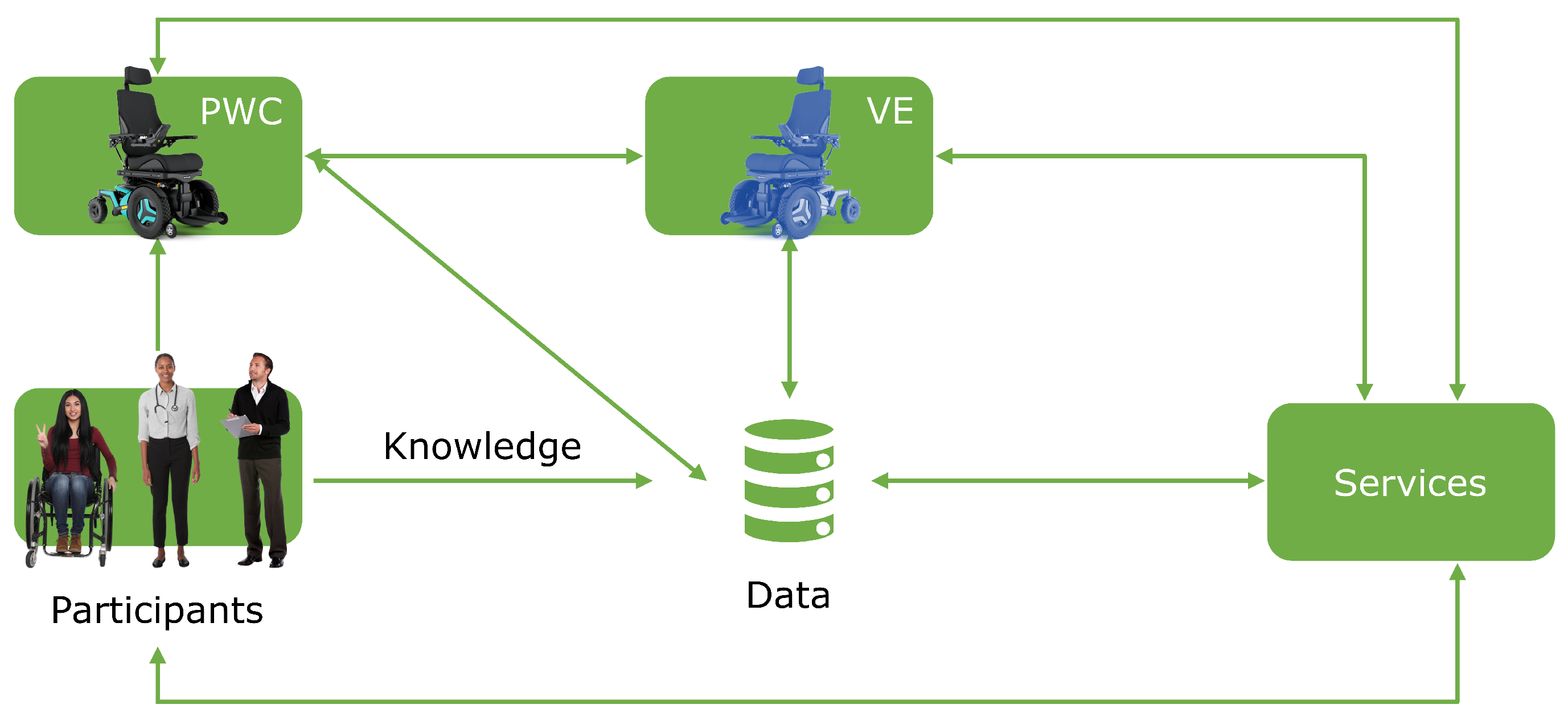
Figure 5.
Different models for modeling the VE (adapted from [27]).
Figure 5.
Different models for modeling the VE (adapted from [27]).

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Lagartinho-Oliveira, C.; Moutinho, F.; Gomes, L. Digital Twin in the Provision of Power Wheelchairs Context: Support for Technical Phases and Conceptual Model. Computers 2022, 11, 166. https://doi.org/10.3390/computers11110166
AMA Style
Lagartinho-Oliveira C, Moutinho F, Gomes L. Digital Twin in the Provision of Power Wheelchairs Context: Support for Technical Phases and Conceptual Model. Computers. 2022; 11(11):166. https://doi.org/10.3390/computers11110166
Chicago/Turabian StyleLagartinho-Oliveira, Carolina, Filipe Moutinho, and Luís Gomes. 2022. "Digital Twin in the Provision of Power Wheelchairs Context: Support for Technical Phases and Conceptual Model" Computers 11, no. 11: 166. https://doi.org/10.3390/computers11110166
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.