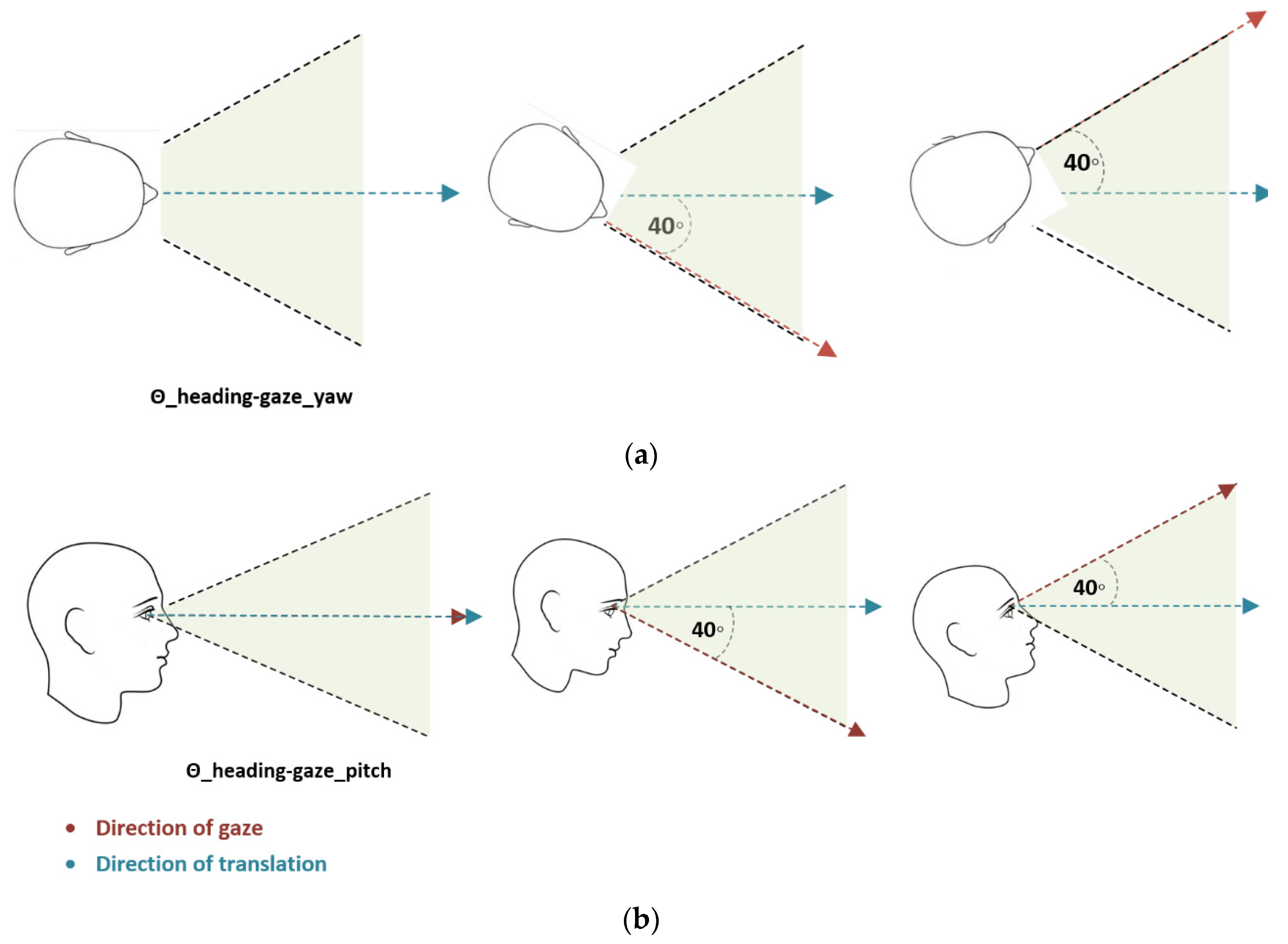
Figure 1.
Head movement constraints when applying translation gains on the user’s viewpoint in VR. (a) Top view showing the range of limits on head movements during a yaw movement. (b) Side view showing the range of limits on head movements during a pitch movement.
Figure 1.
Head movement constraints when applying translation gains on the user’s viewpoint in VR. (a) Top view showing the range of limits on head movements during a yaw movement. (b) Side view showing the range of limits on head movements during a pitch movement.
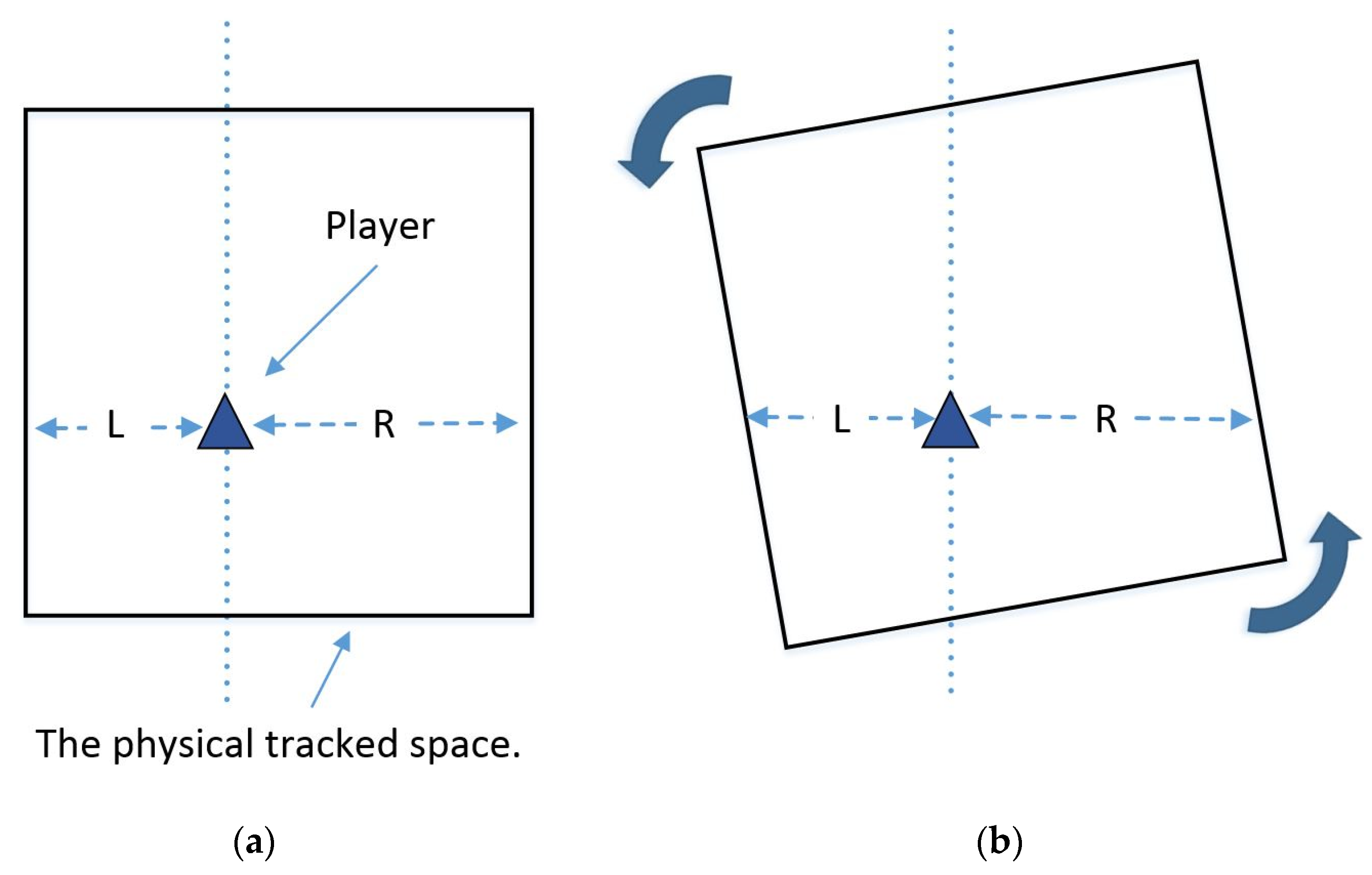
Figure 2.
How the direction of the discrete rotation was selected. (a) The user is represented by a triangle located in the physical space. (b) Discrete rotation was applied to steer the user away from the boundary of the physical space.
Figure 2.
How the direction of the discrete rotation was selected. (a) The user is represented by a triangle located in the physical space. (b) Discrete rotation was applied to steer the user away from the boundary of the physical space.
Figure 3.
User interface (UI) of the software used for detecting eyeblinks in HMDs. (a) The interface when the eye is open. (b) Visualization of the motion vector during eye closure.
Figure 3.
User interface (UI) of the software used for detecting eyeblinks in HMDs. (a) The interface when the eye is open. (b) Visualization of the motion vector during eye closure.
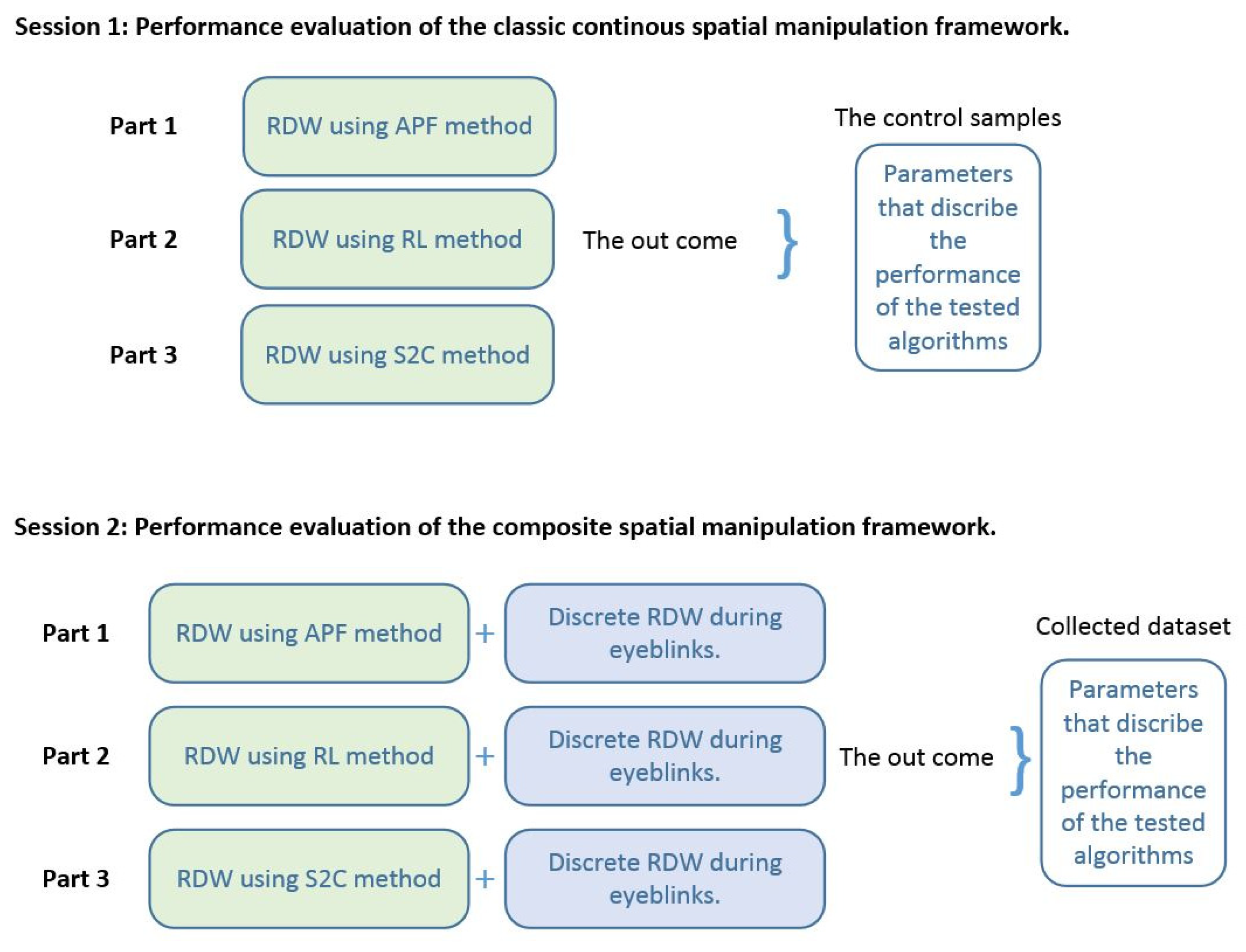
Figure 4.
Summary of the first stage of experiments conducted to evaluate the performance of the proposed composite RDW controllers.
Figure 4.
Summary of the first stage of experiments conducted to evaluate the performance of the proposed composite RDW controllers.
Figure 5.
Top-down view of the virtual environment used in the simulation. The figure shows the virtual walked trajectory (in green) and the physical walked trajectory (in blue).
Figure 5.
Top-down view of the virtual environment used in the simulation. The figure shows the virtual walked trajectory (in green) and the physical walked trajectory (in blue).
Figure 6.
(a) The results of ANOVA for the counts of reset events during the trials. (b) The estimated marginal means of the counts of resets events.
Figure 6.
(a) The results of ANOVA for the counts of reset events during the trials. (b) The estimated marginal means of the counts of resets events.
Figure 7.
(a) The results of the two-factor ANOVA for the average elapsed time between resets. (b) The estimated marginal means of the average elapsed time between resets.
Figure 7.
(a) The results of the two-factor ANOVA for the average elapsed time between resets. (b) The estimated marginal means of the average elapsed time between resets.
Figure 8.
(a) The results of evaluating the average virtual distance that was walked between resets using ANOVA; (b) the marginal means of the virtual distance that was walked between resets.
Figure 8.
(a) The results of evaluating the average virtual distance that was walked between resets using ANOVA; (b) the marginal means of the virtual distance that was walked between resets.
Figure 9.
The virtual environment used in the user experiment. (a) Bird’s-eye view of the warehouse. (b) The box where the cubes needed to be collected. (c) Top-down view of the warehouse.
Figure 9.
The virtual environment used in the user experiment. (a) Bird’s-eye view of the warehouse. (b) The box where the cubes needed to be collected. (c) Top-down view of the warehouse.
Figure 10.
Screenshots that were obtained during the second simulation experiment. (a) Third-person view of an agent simulating a user in the IVE. (b) Top view showing the available simulated tracked physical space for the agent, as well as the virtual walked trajectory (green track) and the physical walked trajectory (blue track).
Figure 10.
Screenshots that were obtained during the second simulation experiment. (a) Third-person view of an agent simulating a user in the IVE. (b) Top view showing the available simulated tracked physical space for the agent, as well as the virtual walked trajectory (green track) and the physical walked trajectory (blue track).
Figure 11.
The average reset counts that were obtained during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 11.
The average reset counts that were obtained during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 12.
The average virtual distance that was walked between resets. The dashed line represents the mean, and the solid line represents the median.
Figure 12.
The average virtual distance that was walked between resets. The dashed line represents the mean, and the solid line represents the median.
Figure 13.
The average time elapsed between resets. The dashed line represents the mean, and the solid line represents the median.
Figure 13.
The average time elapsed between resets. The dashed line represents the mean, and the solid line represents the median.
Figure 14.
The average sum of the virtual distance walked in the virtual environment across the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 14.
The average sum of the virtual distance walked in the virtual environment across the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 15.
The average scores of participant performance across the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 15.
The average scores of participant performance across the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 16.
The ratio of the average sum of the virtual distance walked in the IVE to the average sum of the distance that was walked in the real physical space.
Figure 16.
The ratio of the average sum of the virtual distance walked in the IVE to the average sum of the distance that was walked in the real physical space.
Figure 17.
The physical environment that was used in the user experiment.
Figure 17.
The physical environment that was used in the user experiment.
Figure 18.
The apparatuses that were utilized during the experiment. (1) Notebook; (2) custom notebook mounting rack; (3) Microsoft wireless display adaptor; (4) external battery; (5) external battery charger; (6) monitor; (7) wireless mouse; (8) wireless keyboard; (9) HTC Vive Lighthouse 2; (10) external battery bank 12 V, 9 V, 20,000 mA; (11) HTC Vive controllers; (12) HTC Vive Pro Eye VR-headset; (13) tripods to mount the HTC Vive Lighthouse; (14) backpack.
Figure 18.
The apparatuses that were utilized during the experiment. (1) Notebook; (2) custom notebook mounting rack; (3) Microsoft wireless display adaptor; (4) external battery; (5) external battery charger; (6) monitor; (7) wireless mouse; (8) wireless keyboard; (9) HTC Vive Lighthouse 2; (10) external battery bank 12 V, 9 V, 20,000 mA; (11) HTC Vive controllers; (12) HTC Vive Pro Eye VR-headset; (13) tripods to mount the HTC Vive Lighthouse; (14) backpack.
Figure 19.
The VR mobile station used for the tether-free experience. (a) The custom-made rack and the portable power supply for mounting the notebook inside the backpack. (b) Peripherals (monitor, keyboard, and mouse) were connected wirelessly to the notebook inside the backpack. (c) The backpack with the hardware components which were carried inside it.
Figure 19.
The VR mobile station used for the tether-free experience. (a) The custom-made rack and the portable power supply for mounting the notebook inside the backpack. (b) Peripherals (monitor, keyboard, and mouse) were connected wirelessly to the notebook inside the backpack. (c) The backpack with the hardware components which were carried inside it.
Figure 20.
Experimental procedure for evaluating the performance of the proposed RDWC.
Figure 20.
Experimental procedure for evaluating the performance of the proposed RDWC.
Figure 21.
The average user performance in the IVE for both of the controllers. The dashed line represents the mean, and the solid line represents the median.
Figure 21.
The average user performance in the IVE for both of the controllers. The dashed line represents the mean, and the solid line represents the median.
Figure 22.
The average number of rest counts that were measured during the trials for the groups that utilized the continuous RDW and composite RDW controllers. The dashed line represents the mean, and the solid line represents the median.
Figure 22.
The average number of rest counts that were measured during the trials for the groups that utilized the continuous RDW and composite RDW controllers. The dashed line represents the mean, and the solid line represents the median.
Figure 23.
The average time that elapsed between resets during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 23.
The average time that elapsed between resets during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 24.
The average sum of the virtual distance that was walked between resets during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 24.
The average sum of the virtual distance that was walked between resets during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 25.
The average sums of the real distance that was walked during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 25.
The average sums of the real distance that was walked during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 26.
The average sum of the virtual distance that was walked in the IVE during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 26.
The average sum of the virtual distance that was walked in the IVE during the trials. The dashed line represents the mean, and the solid line represents the median.
Figure 27.
The ratio of the average total virtual distance that was walked in the IVE to the average total distance that was walked in the real physical space.
Figure 27.
The ratio of the average total virtual distance that was walked in the IVE to the average total distance that was walked in the real physical space.
Table 1.
The two-factor ANOVA results for the average counts of reset events during the trials.
Table 1.
The two-factor ANOVA results for the average counts of reset events during the trials.
| Summary | S2C | APF | RL | Total |
|---|
| Continuous Framework |
|---|
| Count | 31 | 31 | 31 | 93 |
| Sum | 434 | 398 | 343 | 1175 |
| Average | 28.93 | 26.53 | 22.87 | 26.11 |
| Variance | 4.92 | 3.55 | 3.70 | 10.24 |
| Composite Framework | | | | |
| Count | 31 | 31 | 31 | 93 |
| Sum | 344 | 297 | 281 | 922 |
| Average | 22.93 | 19.80 | 18.73 | 20.49 |
| Variance | 8.64 | 22.03 | 3.78 | 14.21 |
| Two-factor ANOVA | df | F-value | p-value | F Crit |
| Sample | 1 | 92.53 | <0.001 | 3.95 |
| Columns | 2 | 198.03 | 231.20 | 3.11 |
| Interaction | 2 | 1.73 | 0.183 | 3.11 |
Table 2.
The results of the two-factor ANOVA for the average time elapsed between resets.
Table 2.
The results of the two-factor ANOVA for the average time elapsed between resets.
| Summary | S2C | APF | RL | Total |
|---|
| Continuous Framework |
|---|
| Count | 31 | 31 | 31 | 93 |
| Sum | 177.45 | 197.69 | 179.51 | 554.65 |
| Average | 11.83 | 13.18 | 11.97 | 12.33 |
| Variance | 3.12 | 4.27 | 2.89 | 3.65 |
| Composite Framework | | | | |
| Count | 31 | 31 | 31 | 93 |
| Sum | 224.15 | 265.62 | 231.20 | 720.97 |
| Average | 14.94 | 17.71 | 15.41 | 16.02 |
| Variance | 8.31 | 22.80 | 2.27 | 12.11 |
| Two-factor ANOVA | df | F-value | p-value | F Crit |
| Sample | 1 | 42.24 | <0.001 | 3.95 |
| Columns | 2 | 5.08 | 0.008 | 3.11 |
| Interaction | 2 | 0.565 | 0.570 | 3.11 |
Table 3.
The results of the two-factor ANOVA evaluating the average virtual distance that was walked between resets.
Table 3.
The results of the two-factor ANOVA evaluating the average virtual distance that was walked between resets.
| Summary | S2C | APF | RL | Total |
|---|
| Continuous Framework |
|---|
| Count | 31 | 31 | 31 | 93 |
| Sum | 167.88 | 181.27 | 219.26 | 568.40 |
| Average | 11.19 | 12.08 | 14.62 | 12.63 |
| Variance | 0.90 | 2.31 | 1.93 | 3.79 |
| Composite Framework | | | | |
| Count | 31 | 31 | 31 | 93 |
| Sum | 253.70 | 284.76 | 295.21 | 833.66 |
| Average | 16.91 | 18.98 | 19.68 | 18.53 |
| Variance | 4.13 | 28.54 | 5.45 | 13.54 |
| Two-factor ANOVA | df | F-value | p-value | F Crit |
| Sample | 1 | 108.43 | <0.001 | 3.955 |
| Columns | 2 | 9.98 | 0.0001 | 3.105 |
| Interaction | 2 | 0.90 | 0.41 | 3.105 |
Table 4.
Performance metrics that were obtained during the trials and the evaluated score values for each controller.
Table 4.
Performance metrics that were obtained during the trials and the evaluated score values for each controller.
| Framework | Controller Type | Average Count of Resets | Average Virtual Distance Walked between Resets | Average Time Elapsed between Resets |
|---|
| Continuous Framework | RDW by RL | 22.87 | 14.62 | 11.97 |
| Continuous Framework | RDW by APF | 26.33 | 12.20 | 13.18 |
| Continuous Framework | RDW by S2C | 28.93 | 11.39 | 11.83 |
| Composite Framework | RDW by RL | 18.73 | 19.68 | 15.41 |
| Composite Framework | RDW by APF | 19.80 | 19.38 | 17.71 |
| Composite Framework | RDW by S2C | 22.93 | 16.91 | 14.94 |
| p-Value | | <0.001 | <0.001 | <0.001 |
Table 5.
Descriptive statistics of the average value of the reset counts that were obtained during the trials.
Table 5.
Descriptive statistics of the average value of the reset counts that were obtained during the trials.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 73.06 | 5.68 | 1.02 |
| Composite RDWC | 31 | 67.39 | 6.94 | 1.25 |
Table 6.
Descriptive statistics of the average value of the virtual distance that was walked between the resets.
Table 6.
Descriptive statistics of the average value of the virtual distance that was walked between the resets.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 7.14 | 0.64 | 0.12 |
| Composite RDWC | 31 | 10.16 | 1.22 | 0.22 |
Table 7.
Descriptive statistics for the average time elapsed between resets.
Table 7.
Descriptive statistics for the average time elapsed between resets.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 8.44 | 0.67 | 0.12 |
| Composite RDWC | 31 | 9.03 | 0.9 | 0.16 |
Table 8.
Descriptive statistics for the average of the sum of the virtual distance (m) that was walked in the IVE.
Table 8.
Descriptive statistics for the average of the sum of the virtual distance (m) that was walked in the IVE.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 527.29 | 46.14 | 8.29 |
| Composite RDWC | 31 | 691.02 | 80.91 | 14.53 |
Table 9.
Descriptive statistics for the average scores that were achieved by the participants during the trials.
Table 9.
Descriptive statistics for the average scores that were achieved by the participants during the trials.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 16.26 | 1.77 | 0.32 |
| Composite RDWC | 31 | 19.97 | 2.71 | 0.49 |
Table 10.
Descriptive statistics for the mean value of the ratio of the virtual-to-physical walked distance during the trials.
Table 10.
Descriptive statistics for the mean value of the ratio of the virtual-to-physical walked distance during the trials.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 1.35 | 0.01 | 0 |
| Composite RDWC | 31 | 1.5 | 0.04 | 0.01 |
Table 11.
The performance parameters that were evaluated for the classic RDW controller and the proposed approach during the simulation study.
Table 11.
The performance parameters that were evaluated for the classic RDW controller and the proposed approach during the simulation study.
| RDW Controllers | Average Score of User Performance | Average Count of Resets | Average Virtual Distance Walked between Resets | Average Time Elapsed between Resets | The Average Sum of the Virtual Distance Walked | The Ratio of Virtual/Real Distance Walked |
|---|
| Continuous RDWC | 16.26 | 73.06 | 7.14 (m) | 8.44 (s) | 527.29 (m) | 1.35 |
| Composite RDWC | 19.97 | 67.39 | 10.16 (m) | 9.03 (s) | 691.02 (m) | 1.5 |
| p-value | ˂0.001 | ˂0.004 | ˂0.001 | =0.001 | ˂0.001 | ˂0.001 |
Table 12.
Descriptive statistics for the mean ratio of the virtual distance that was walked to the physical distance that was walked during the trials.
Table 12.
Descriptive statistics for the mean ratio of the virtual distance that was walked to the physical distance that was walked during the trials.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 11.18 | 1.78 | 0.43 |
| Composite RDWC | 31 | 14.59 | 1.77 | 0.43 |
Table 13.
Descriptive statistics for the mean value of reset counts during the trials.
Table 13.
Descriptive statistics for the mean value of reset counts during the trials.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 60.82 | 6.74 | 1.63 |
| Composite RDWC | 31 | 51.94 | 7.95 | 1.93 |
Table 14.
Descriptive statistics for the mean value of the average time that elapsed during the trials.
Table 14.
Descriptive statistics for the mean value of the average time that elapsed during the trials.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 10.96 | 1.31 | 0.32 |
| Composite RDWC | 31 | 11.52 | 1.6 | 0.39 |
Table 15.
Descriptive statistics for the average virtual distance that was walked between resets.
Table 15.
Descriptive statistics for the average virtual distance that was walked between resets.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 7.57 | 1.11 | 0.29 |
| Composite RDWC | 31 | 9.54 | 1.16 | 0.3 |
Table 16.
Descriptive statistics for the mean value of the average sum of the real distance that was walked during the trials.
Table 16.
Descriptive statistics for the mean value of the average sum of the real distance that was walked during the trials.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 411.87 | 32.48 | 7.88 |
| Composite RDWC | 31 | 523.96 | 79.3 | 19.23 |
Table 17.
Descriptive statistics for the average sum of the virtual distance that was walked in the IVE during the trials.
Table 17.
Descriptive statistics for the average sum of the virtual distance that was walked in the IVE during the trials.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 435.06 | 34.58 | 8.39 |
| Composite RDWC | 31 | 671.78 | 112.6 | 27.31 |
Table 18.
Descriptive statistics for the ratio of virtual-to-physical distance that was walked during the trials.
Table 18.
Descriptive statistics for the ratio of virtual-to-physical distance that was walked during the trials.
| Framework | Samples | Mean | Std. Deviation | Std. Error Mean |
|---|
| Continuous RDWC | 31 | 1.11 | 0.09 | 0.02 |
| Composite RDWC | 31 | 1.32 | 0.08 | 0.021 |
Table 19.
Descriptive statistics for the performance parameters of the composite and the continuous RDW controller groups.
Table 19.
Descriptive statistics for the performance parameters of the composite and the continuous RDW controller groups.
| RDW Controllers | Average Score of User Performance | Average Count of Resets | Average Virtual Walked Distance between the Resets | Average Time Elapsed between Resets | The Average Sum of the Virtual Walked Distance | The Ratio of Virtual/Real Walked Distance |
|---|
| Continuous RDWC | 11.12 | 60.82 | 7.57 (m) | 10.96 (s) | 435.06 (m) | 1.11 |
| Composite RDWC | 14.59 | 51.94 | 9.54 (m) | 11.52 (s) | 671.78 (m) | 1.32 |
| p-value | ˂0.001 | ˂0.001 | ˂0.001 | ≥0.076 | ˂0.001 | ˂0.001 |




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}