
A Review of Agent-Based Programming for Multi-Agent Systems



Abstract
1. Introduction
2. History on Agent-Based Programming
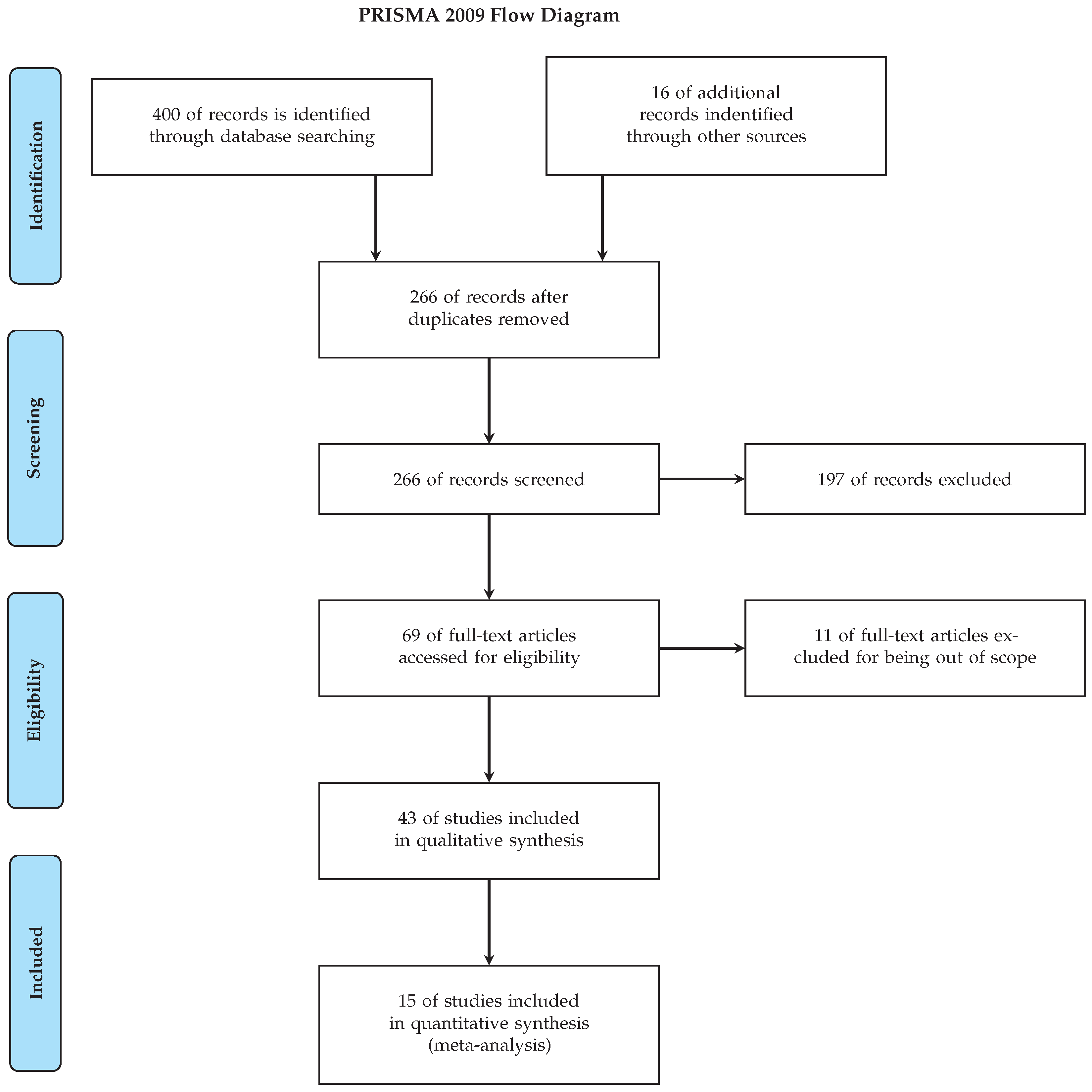
3. Review Methodology
- Agent-Based Programming Languages
- Agent-Based Programming Extensions
- Agent-Based Programming Comparison
- Agent-Based Programming Applications
4. Review Findings on Agent-Based Programming for Mas
4.1. Agent Programming Languages
4.1.1. General-Purpose APLs
4.1.2. ABMS, Robotics, and Others
4.2. Agent Programming Languages Extensions
4.3. Agent Programming Languages Comparison
4.4. Agent-Based Applications
5. Discussion and Future Directions
Recommendation for Further Research
6. Conclusions
Funding
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| AOP | Agent-Oriented Programming |
| AOSE | Agent-Oriented Software Engineering |
| APL | Agent Programming Language |
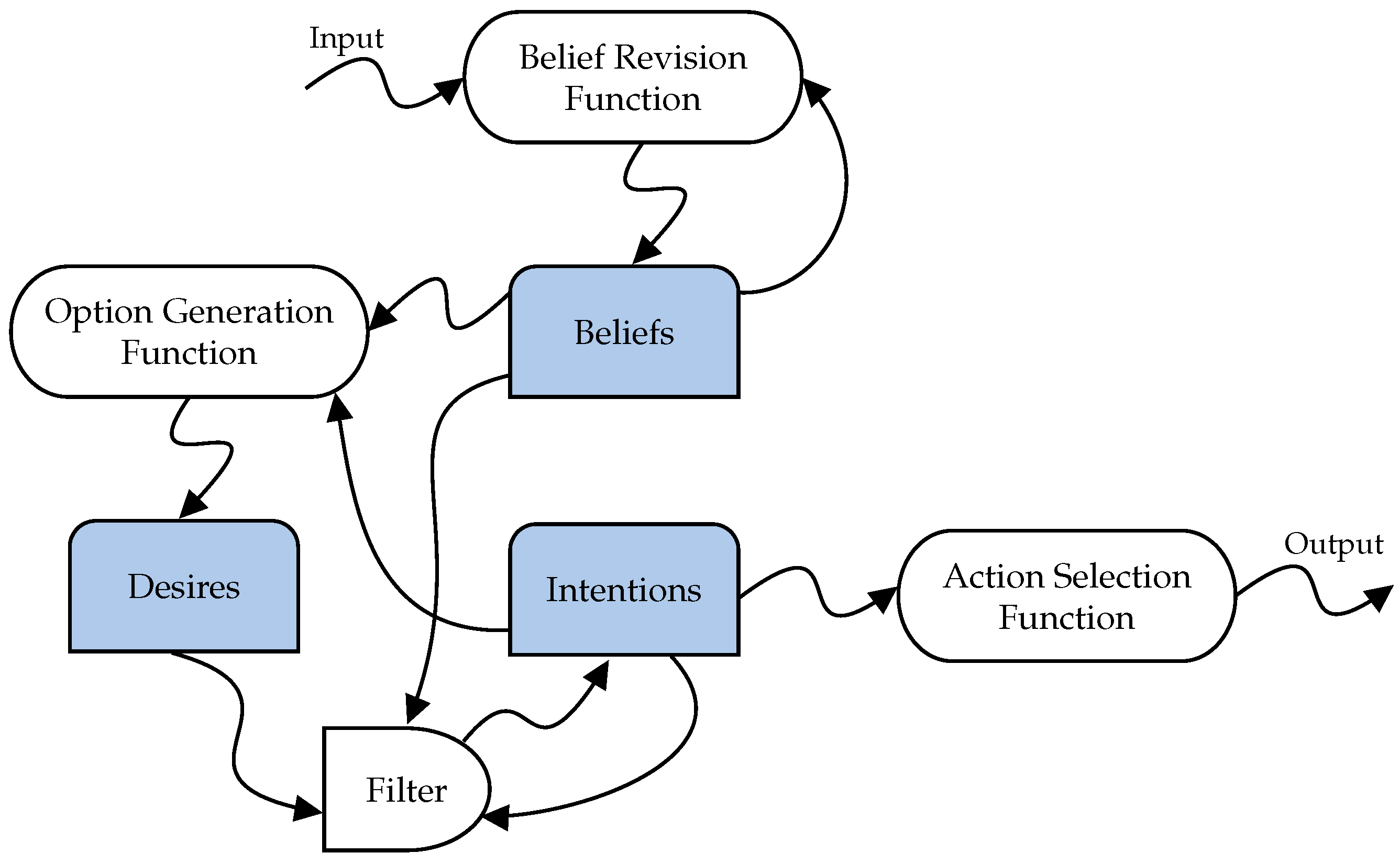
| BDI | Belief-Desire-Intention |
| CPS | Cyber-Physical Systems |
| DSL | Domain Specific Language |
| HTN | Hierarchical Task Network |
| IoT | Internet of Things |
| MAPC | Multi-Agent Programming Contest |
| MAS | Multi-Agent System |
| OOP | Object-Oriented Programming |
| PRS | Procedural Reasoning System |
References
- Wooldridge, M. An Introduction to MultiAgent Systems, 2nd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2009; ISBN 047149691X. [Google Scholar]
- Wooldridge, M.J.; Jennings, N.R. Intelligent agents: Theory and practice. Knowl. Eng. Rev. 1995, 10, 115–152. [Google Scholar] [CrossRef]
- Logan, B. An agent programming manifesto. Int. J. Agent-Oriented Softw. Eng. 2018, 6, 187–210. [Google Scholar] [CrossRef]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Bordini, R.H.; Seghrouchni, A.E.F.; Hindriks, K.V.; Logan, B.; Ricci, A. Agent programming in the cognitive era. Auton. Agents Multi Agent Syst. 2020, 34, 37. [Google Scholar] [CrossRef]
- Mao, X.; Wang, Q.; Yang, S. A survey of agent-oriented programming from software engineering perspective. Web Intell. 2017, 15, 143–163. [Google Scholar] [CrossRef]
- Kravari, K.; Bassiliades, N. A Survey of Agent Platforms. J. Artif. Soc. Soc. Simul. 2015, 18. [Google Scholar] [CrossRef]
- Abar, S.; Theodoropoulos, G.K.; Lemarinier, P.; O’Hare, G.M.P. Agent Based Modelling and Simulation tools: A review of the state-of-art software. Comput. Sci. Rev. 2017, 24, 13–33. [Google Scholar] [CrossRef]
- Isern, D.; Moreno, A. A systematic literature review of agents applied in healthcare. J. Med Syst. 2016, 40, 43. [Google Scholar] [CrossRef]
- Adam, C.; Gaudou, B. BDI agents in social simulations: A survey. Knowl. Eng. Rev. 2016, 31, 207–238. [Google Scholar] [CrossRef]
- Shoham, Y. Agent-oriented Programming. Artif. Intell. 1993, 60, 51–92. [Google Scholar] [CrossRef]
- Georgeff, M.; Lansky, A. Procedural Knowledge. Proc. IEEE (Spec. Issue Knowl. Represent.) 1986, 74, 1383–1398. [Google Scholar] [CrossRef]
- Bratman, M.E. Intentions, Plans, and Practical Reason; Center for the Study of Language and Information: Stanford, CA, USA, 1999. [Google Scholar]
- Rao, A.S.; Georgeff, M. BDI Agents: From Theory to Practice. In Proceedings of the First International Conference on Multiagent Systems (ICMAS), San Francisco, CA, USA, 12–14 June 1995; pp. 312–319. [Google Scholar]
- Rao, A.S. AgentSpeak(L): BDI Agents Speak Out in a Logical Computable Language. In Agents Breaking Away, Proceedings of the 7th European Workshop on Modelling Autonomous Agents in a Multi-Agent World, Eindhoven, The Netherlands, 22–25 January 1996; Lecture Notes in Computer Science; de Velde, W.V., Perram, J.W., Eds.; Springer: Berlin/Heidelberg, Germany, 1996; Volume 1038, pp. 42–55. [Google Scholar] [CrossRef]
- McCarthy, J.; Hayes, P.J. Some Philosophical Problems from the Standpoint of Artificial Intelligence. In Machine Intelligence 4; Meltzer, B., Michie, D., Eds.; Edinburgh University Press: Edinburgh, UK, 1969; pp. 463–502. [Google Scholar]
- Issicaba, D.; Rosa, M.A.; Prostejovsky, A.M.; Bindner, H.W. Experimental validation of BDI agents for distributed control of electric power grids. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Sorici, A.; Boissier, O.; Picard, G.; Santi, A. Exploiting the JaCaMo Framework for Realising an Adaptive Room Governance Application. In Proceedings of the Compilation of the Co-Located Workshops on DSM’11, TMC’11, AGERE! 2011, AOOPES’11, NEAT’11, and VMIL’11, New York, NY, USA, 1–31 October 2011; pp. 239–242. [Google Scholar] [CrossRef]
- Persson, C.; Picard, G.; Ramparany, F.; Boissier, O. A JaCaMo-Based Governance of Machine-to-Machine Systems. In Advances on Practical Applications of Agents and Multi-Agent Systems; Demazeau, Y., Müller, J.P., Rodríguez, J.M.C., Pérez, J.B., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 161–168. [Google Scholar]
- Krupa, Y.; Vercouter, L. Handling Privacy as Contextual Integrity in Decentralized Virtual Communities: The PrivaCIAS Framework. Web Intelli. Agent Syst. 2012, 10, 105–116. [Google Scholar] [CrossRef]
- Collier, R.W.; Russell, S.E.; Lillis, D. Reflecting on Agent Programming with AgentSpeak(L). In Proceedings of the PRIMA 2015: Principles and Practice of Multi-Agent Systems—18th International Conference, Bertinoro, Italy, 26–30 October 2015; Lecture Notes in Computer Science; Chen, Q., Torroni, P., Villata, S., Hsu, J.Y., Omicini, A., Eds.; Springer: Cham, Switzerland, 2015; Volume 9387, pp. 351–366. [Google Scholar] [CrossRef]
- Honorato-Zimmer, R.; Millar, A.J.; Plotkin, G.D.; Zardilis, A. Chromar, a language of parameterised agents. Theor. Comput. Sci. 2019, 765, 97–119. [Google Scholar] [CrossRef]
- Hindriks, K.V.; de Boer, F.S.; van der Hoek, W.; Meyer, J.J.C. Agent Programming with Declarative Goals. In Proceedings of the 7th International Workshop on Agent Theories, Architectures, Boston, MA, USA, 7–9 July 2020; pp. 228–243. [Google Scholar]
- Bordini, R.H.; Wooldridge, M.; Hübner, J.F. Programming Multi-Agent Systems in AgentSpeak Using Jason; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Boissier, O.; Bordini, R.H.; Hübner, J.F.; Ricci, A.; Santi, A. Multi-agent oriented programming with JaCaMo. Sci. Comput. Program. 2013, 78, 747–761. [Google Scholar] [CrossRef]
- Boissier, O.; Bordini, R.; Hubner, J.; Ricci, A. Multi-Agent Oriented Programming: Programming Multi-Agent Systems Using JaCaMo; Intelligent Robotics and Autonomous Agents Series; MIT Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Ricci, A.; Piunti, M.; Viroli, M.; Omicini, A. Environment Programming in CArtAgO. In Multi-Agent Programming: Languages, Tools and Applications; Multiagent Systems, Artificial Societies, and Simulated Organizations; Springer: Boston, MA, USA, 2009; Chapter 8; pp. 259–288. [Google Scholar] [CrossRef]
- Hübner, J.F.; Sichman, J.S.; Boissier, O. Developing organised multiagent systems using the MOISE+ model: Programming issues at the system and agent levels. Int. J. Agent-Oriented Softw. Eng. 2007, 1, 370–395. [Google Scholar] [CrossRef]
- Dennis, L.A. Gwendolen Semantics: 2017; Technical Report ULCS-17-001; University of Liverpool, Department of Computer Science: Liverpool, UK, 2017. [Google Scholar]
- Bellifemine, F.L.; Caire, G.; Greenwood, D. Developing Multi-Agent Systems with JADE (Wiley Series in Agent Technology); John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Bergenti, F.; Iotti, E.; Monica, S.; Poggi, A. Agent-oriented model-driven development for JADE with the JADEL programming language. Comput. Lang. Syst. Struct. 2017, 50, 142–158. [Google Scholar] [CrossRef]
- Bergenti, F.; Monica, S.; Petrosino, G. A scripting language for practical agent-oriented programming. In Proceedings of the 8th ACM SIGPLAN International Workshop on Programming Based on Actors, Agents, and Decentralized Control, AGERE!@SPLASH 2018, Boston, MA, USA, 5 November 2018; pp. 62–71. [Google Scholar] [CrossRef]
- Pokahr, A.; Braubach, L.; Lamersdorf, W. Jadex: A BDI Reasoning Engine. In Multi-Agent Programming: Languages, Platforms and Applications; Springer: Boston, MA, USA, 2005; pp. 149–174. [Google Scholar] [CrossRef]
- Aschermann, M.; Dennisen, S.; Kraus, P.; Müller, J.P. LightJason, a Highly Scalable and Concurrent Agent Framework: Overview and Application. In Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent Systems, AAMAS 2018, Stockholm, Sweden, 10–15 July 2018; pp. 1794–1796. [Google Scholar]
- Hashmi, M.A.; Seghrouchni, A.E.F.; Akram, M.U. A Planning Based Agent Programming Language Supporting Environment Modeling. In Proceedings of the IEEE/WIC/ACM International Conference on Web Intelligence and Intelligent Agent Technology, WI-IAT 2015, Singapore, 6–9 December 2015; pp. 76–83. [Google Scholar] [CrossRef]
- Kilaru, J. PLASA: Programming Language for Synchronous Agents. Master’s Thesis, California State University, Long Beach, CA, USA, 2018. [Google Scholar]
- Flocchini, P.; Prencipe, G.; Santoro, N.; Widmayer, P. Gathering of asynchronous robots with limited visibility. Theor. Comput. Sci. 2005, 337, 147–168. [Google Scholar] [CrossRef]
- Bonci, A.; Pirani, M.; Bianconi, C.; Longhi, S. RMAS: Relational Multiagent System for CPS Prototyping and Programming. In Proceedings of the 14th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, MESA 2018, Oulu, Finland, 2–4 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Rodriguez, S.; Gaud, N.; Galland, S. SARL: A General-Purpose Agent-Oriented Programming Language. In Proceedings of the 2014 IEEE/WIC/ACM International Joint Conferences on Web Intelligence (WI) and Intelligent Agent Technologies (IAT), Warsaw, Poland, 11–14 August 2014; Volume III, pp. 103–110. [Google Scholar] [CrossRef]
- Molesini, A.; Casadei, M.; Omicini, A.; Viroli, M. Simulation in agent-oriented software engineering: The SODA case study. Sci. Comput. Program. 2013, 78, 705–714. [Google Scholar] [CrossRef]
- García-Magariño, I.; Gómez-Rodríguez, A.; Moreno, J.C.G.; Navarro, G.P. PEABS: A Process for developing Efficient Agent-Based Simulators. Eng. Appl. Artif. Intell. 2015, 46, 104–112. [Google Scholar] [CrossRef]
- Pavón, J.; Gómez-Sanz, J.; Fuentes-Fernández, R. The INGENIAS methodology and tools. In Agent-Oriented Methodol; IGI Global: Hershey, PA, USA, 2005; pp. 236–276. [Google Scholar] [CrossRef]
- Caillou, P.; Gaudou, B.; Grignard, A.; Truong, Q.C.; Taillandier, P. A Simple-to-Use BDI Architecture for Agent-Based Modeling and Simulation. In Proceedings of the European Social Simulation Association 2015, Groningen, The Netherlands, 14–18 September 2015; Volume 528, pp. 15–28. [Google Scholar] [CrossRef]
- Taillandier, P.; Bourgais, M.; Caillou, P.; Adam, C.; Gaudou, B. A BDI Agent Architecture for the GAMA Modeling and Simulation Platform. In Proceedings of the Multi-Agent Based Simulation XVII—International Workshop, MABS 2016, Singapore, 10 May 2016; Volume 10399, pp. 3–23. [Google Scholar] [CrossRef]
- Grignard, A.; Taillandier, P.; Gaudou, B.; Vo, D.; Huynh, N.Q.; Drogoul, A. GAMA 1.6: Advancing the Art of Complex Agent-Based Modeling and Simulation. In Proceedings of the PRIMA 2013: Principles and Practice of Multi-Agent Systems—16th International Conference, Dunedin, New Zealand, 1–6 December 2013; Volume 8291, pp. 117–131. [Google Scholar] [CrossRef]
- Singh, D.; Padgham, L.; Logan, B. Integrating BDI Agents with Agent-Based Simulation Platforms. Auton. Agents Multi Agent Syst. 2016, 30, 1050–1071. [Google Scholar] [CrossRef]
- Belle, V.; Levesque, H.J. PREGO: An Action Language for Belief-Based Cognitive Robotics in Continuous Domains. In Proceedings of the Twenty-Eighth AAAI Conference on Artificial Intelligence, Québec City, QC, Canada, 27–31 July 2014; pp. 989–995. [Google Scholar]
- Belle, V.; Levesque, H.J. ALLEGRO: Belief-Based Programming in Stochastic Dynamical Domains. In Proceedings of the Twenty-Fourth International Joint Conference on Artificial Intelligence, IJCAI 2015, Buenos Aires, Argentina, 25–31 July 2015; pp. 2762–2769. [Google Scholar]
- Levesque, H.J.; Reiter, R.; Lespérance, Y.; Lin, F.; Scherl, R.B. GOLOG: A Logic Programming Language for Dynamic Domains. J. Log. Program. 1997, 31, 59–83. [Google Scholar] [CrossRef]
- Ferrein, A.; Maier, C.; Mühlbacher, C.; Niemueller, T.; Steinbauer, G.; Vassos, S. Controlling Logistics Robots with the Action-Based Language YAGI. In Proceedings of the Intelligent Robotics and Applications—9th International Conference, ICIRA 2016, Tokyo, Japan, 22–24 August 2016; Volume 9834, pp. 525–537. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the Workshop on Open Source Software at the International Conference on Robotics and Automation, Kobe, Japan, 12–13 May 2009; p. 5. [Google Scholar]
- Kaptein, F.; Broekens, J.; Hindriks, K.V.; Neerincx, M.A. CAAF: A Cognitive Affective Agent Programming Framework. In Proceedings of the Intelligent Virtual Agents—16th International Conference, IVA 2016, Los Angeles, CA, USA, 20–23 September 2016; Volume 10011, pp. 317–330. [Google Scholar] [CrossRef]
- Praça, I.; Ramos, C.; Vale, Z.; Cordeiro, M. MASCEM: A multiagent system that simulates competitive electricity markets. IEEE Intell. Syst. 2003, 18, 54–60. [Google Scholar] [CrossRef]
- Santos, G.; Pinto, T.; Praça, I.; Vale, Z. MASCEM: Optimizing the performance of a multi-agent system. Energy 2016, 111, 513–524. [Google Scholar] [CrossRef]
- García-Magariño, I.; Navarro, G.P.; Lacuesta, R. TABSAOND: A technique for developing agent-based simulation apps and online tools with nondeterministic decisions. Simul. Model. Pract. Theory 2017, 77, 84–107. [Google Scholar] [CrossRef]
- Cich, G.; Galland, S.; Knapen, L.; Yasar, A.; Bellemans, T.; Janssens, D. Addressing the Challenges of Conservative Event Synchronization for the SARL Agent-Programming Language. In Proceedings of the Advances in Practical Applications of Cyber-Physical Multi-Agent Systems, PAAMS Collection—15th International Conference, PAAMS 2017, Porto, Portugal, 21–23 June 2017; Volume 10349, pp. 31–42. [Google Scholar] [CrossRef]
- Jain, S.; Asawa, K. Programming an expressive autonomous agent. Expert Syst. Appl. 2016, 43, 131–141. [Google Scholar] [CrossRef]
- Jain, S.; Asawa, K. EMIA: Emotion model for intelligent agent. J. Intell. Syst. 2015, 24, 449–465. [Google Scholar] [CrossRef]
- Dastani, M. 2APL: A practical agent programming language. Auton. Agents Multi-Agent Syst. 2008, 16, 214–248. [Google Scholar] [CrossRef]
- Pantoja, C.E.; Stabile, M.F.; Lazarin, N.M.; Sichman, J.S. ARGO: An Extended Jason Architecture that Facilitates Embedded Robotic Agents Programming. In Proceedings of the Engineering Multi-Agent Systems—4th International Workshop, EMAS 2016, Singapore, 9–10 May 2016; Volume 10093, pp. 136–155. [Google Scholar] [CrossRef]
- Leask, S.; Logan, B. Programming deliberation strategies in meta-APL. In Proceedings of the International Conference on Principles and Practice of Multi-Agent Systems, Bertinoro, Italy, 26–30 October 2015; pp. 433–448. [Google Scholar]
- Doan, T.T.; Yao, Y.; Alechina, N.; Logan, B. Verifying heterogeneous multi-agent programs. In Proceedings of the International conference on Autonomous Agents and Multi-Agent Systems, AAMAS ’14, Paris, France, 5–9 May 2014; pp. 149–156. [Google Scholar]
- Cardoso, R.C.; Ferrando, A.; Dennis, L.A.; Fisher, M. An Interface for Programming Verifiable Autonomous Agents in ROS. In Proceedings of the European Conference on Multi-Agent Systems (EUMAS), Thessaloniki, Greece, 14–15 September 2020. [Google Scholar]
- Onyedinma, C.; Gavigan, P.; Esfandiari, B. Toward Campus Mail Delivery Using BDI. J. Sens. Actuator Netw. 2020, 9, 56. [Google Scholar] [CrossRef]
- Bosello, M.; Ricci, A. From Programming Agents to Educating Agents - A Jason-Based Framework for Integrating Learning in the Development of Cognitive Agents. In Proceedings of the Engineering Multi-Agent Systems—7th International Workshop, EMAS 2019, Montreal, QC, Canada, 13–14 May 2019; Volume 12058, pp. 175–194. [Google Scholar] [CrossRef]
- Cardoso, R.C.; Zatelli, M.R.; Hübner, J.F.; Bordini, R.H. Towards Benchmarking Actor- and Agent-Based Programming Languages. In Proceedings of the Workshop on Programming Based on Actors, Agents, and Decentralized Control, Indianapolis, IN, USA, 27 October 2013; pp. 115–126. [Google Scholar]
- Challenger, M.; Kardas, G.; Tekinerdogan, B. A systematic approach to evaluating domain-specific modeling language environments for multi-agent systems. Softw. Qual. J. 2016, 24, 755–795. [Google Scholar] [CrossRef]
- Bergenti, F.; Iotti, E.; Monica, S.; Poggi, A. A Comparison between Asynchronous Backtracking Pseudocode and its JADEL Implementation. In Proceedings of the 9th International Conference on Agents and Artificial Intelligence, ICAART, Porto, Portugal, 24–26 February 2017; Volume 2, pp. 250–258. [Google Scholar] [CrossRef]
- Rousset, A.; Herrmann, B.; Lang, C.; Philippe, L. A survey on parallel and distributed multi-agent systems for high performance computing simulations. Comput. Sci. Rev. 2016, 22, 27–46. [Google Scholar] [CrossRef]
- Sun, Z.; Lorscheid, I.; Millington, J.D.A.; Lauf, S.; Magliocca, N.R.; Groeneveld, J.; Balbi, S.; Nolzen, H.; Müller, B.; Schulze, J.; et al. Simple or complicated agent-based models? A complicated issue. Environ. Model. Softw. 2016, 86, 56–67. [Google Scholar] [CrossRef]
- Cardoso, R.C.; Krausburg, T.; Baségio, T.L.; Engelmann, D.C.; Hübner, J.F.; Bordini, R.H. SMART-JaCaMo: An organization-based team for the multi-agent programming contest. Ann. Math. Artif. Intell. 2018, 84, 75–93. [Google Scholar] [CrossRef]
- Krausburg, T.; Cardoso, R.C.; Damasio, J.; Peres, V.; Farias, G.P.; Engelmann, D.C.; Hübner, J.F.; Bordini, R.H. SMART–JaCaMo: An Organisation-Based Team for the Multi-Agent Programming Contest. In The Multi-Agent Programming Contest 2018; Ahlbrecht, T., Dix, J., Fiekas, N., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 72–100. [Google Scholar]
- Cardoso, R.C.; Ferrando, A.; Papacchini, F. LFC: Combining Autonomous Agents and Automated Planning in the Multi-Agent Programming Contest. In Multi-Agent Progamming Contest; Springer: Cham, Switzerland, 2019; pp. 31–58. [Google Scholar]
- Vezina, M.; Esfandiari, B. The Requirement Gatherers’ Approach to the 2019 Multi-Agent Programming Contest Scenario. In The Multi-Agent Programming Contest 2019; Ahlbrecht, T., Dix, J., Fiekas, N., Krausburg, T., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 106–150. [Google Scholar]
- Villadsen, J.; Bjørn, M.O.; From, A.H.; Henney, T.S.; Larsen, J.B. Multi-Agent Programming Contest 2018—The Jason-DTU Team. In The Multi-Agent Programming Contest 2018; Ahlbrecht, T., Dix, J., Fiekas, N., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 41–71. [Google Scholar]
- Jensen, A.B.; Villadsen, J. GOAL-DTU: Development of Distributed Intelligence for the Multi-Agent Programming Contest. In The Multi-Agent Programming Contest 2019; Ahlbrecht, T., Dix, J., Fiekas, N., Krausburg, T., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 79–105. [Google Scholar]
- Wolfram, C. An Agent-Based Model of COVID-19. Complex Syst. 2020, 29. [Google Scholar] [CrossRef]
- Prudhomme, C.; Cruz, C.; Cherifi, H. An Agent based model for the transmission and control of the COVID-19 in Dijon (extended abstract). In Proceedings of the MARAMI 2020—Modèles & Analyse des Réseaux: Approches Mathématiques & Informatiques—The 11th Conference on Network Modeling and Analysis, Virtual Conference, Montpellier, France, 14–15 October 2020; Volume 2750. [Google Scholar]
- Khan, M.W.; Wang, J. The research on multi-agent system for microgrid control and optimization. Renew. Sustain. Energy Rev. 2017, 80, 1399–1411. [Google Scholar] [CrossRef]
- Kantamneni, A.; Brown, L.E.; Parker, G.G.; Weaver, W.W. Survey of multi-agent systems for microgrid control. Eng. Appl. Artif. Intell. 2015, 45, 192–203. [Google Scholar] [CrossRef]
- González-Briones, A.; De La Prieta, F.; Mohamad, M.S.; Omatu, S.; Corchado, J.M. Multi-agent systems applications in energy optimization problems: A state-of-the-art review. Energies 2018, 11, 1928. [Google Scholar] [CrossRef]
- QuanLi, X.; Kun, Y.; GuiLin, W.; YuLian, Y. Agent-based modeling and simulations of land-use and land-cover change according to ant colony optimization: A case study of the Erhai Lake Basin, China. Nat. Hazards 2015, 75, 95–118. [Google Scholar] [CrossRef]
- North, M.; Collier, N.; Ozik, J.; Tatara, E.; Macal, C.; Bragen, M.; Sydelko, P. Complex Adaptive Systems Modeling with Repast Simphony. Complex Adapt. Syst. Model. 2013, 1, 1–26. [Google Scholar] [CrossRef]
- Castilla-Rho, J.C.; Mariethoz, G.; Rojas-Mujica, R.; Andersen, M.S.; Kelly, B.F.J. An agent-based platform for simulating complex human-aquifer interactions in managed groundwater systems. Environ. Model. Softw. 2015, 73, 305–323. [Google Scholar] [CrossRef]
- Savaglio, C.; Fortino, G.; Ganzha, M.; Paprzycki, M.; Badica, C.; Ivanovic, M. Agent-Based Computing in the Internet of Things: A Survey. In Proceedings of the Intelligent Distributed Computing XI—11th International Symposium on Intelligent Distributed Computing—IDC 2017, Belgrade, Serbia, 11–13 October 2017; Volume 737, pp. 307–320. [Google Scholar] [CrossRef]
- Krivic, P.; Skocir, P.; Kusek, M.; Jezic, G. Microservices as Agents in IoT Systems. In Proceedings of the Agent and Multi-Agent Systems: Technology and Applications, 11th KES International Conference, KES-AMSTA 2017, Vilamoura, Algarve, Portugal, 21–23 June 2017; Volume 74, pp. 22–31. [Google Scholar] [CrossRef]
- Ayala, I.; Amor, M.; Fuentes, L.; Troya, J.M. A Software Product Line Process to Develop Agents for the IoT. Sensors 2015, 15, 15640–15660. [Google Scholar] [CrossRef]
- Iotti, E.; Petrosino, G.; Monica, S.; Bergenti, F. Exploratory Experiments on Programming Autonomous Robots in Jadescript. In Proceedings of the First Workshop on Agents and Robots for reliable Engineered Autonomy, AREA@ECAI 2020, Virtual Event, Santiago de Compostela, Spain, 4 September 2020; Volume 319, pp. 55–67. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| APL | Model | Implementation (Language-Link) | Last Updated |
|---|---|---|---|
| ASTRA | BDI | Java https://gitlab.com/astra-language | 6 November 2020 |
| Chromar | rule-based | Haskell https://github.com/azardilis/Chromar | 14 June 2020 |
| GOAL | rule-based | Java https://goalapl.atlassian.net/wiki/spaces/GOAL/overview | 15 December 2020 |
| Gwendolen | BDI | Java https://github.com/mcapl/mcapl | 7 December 2020 |
| JaCaMo | BDI, organisation, environment | Java https://github.com/jacamo-lang/jacamo | 20 September 2020 |
| JADE | FIPA | Java https://jade.tilab.com/ | 8 June 2017 |
| JADEL | DSL, interaction | Java/Jade ✗ | ✗ |
| Jadex | mixed, BDI and OOP | Java https://github.com/actoron/jadex | 10 January 2021 |
| Jadescript | DSL, scripting | Java/Jade ✗ | ✗ |
| Jason | BDI | Java https://github.com/jason-lang/jason | 12 November 2020 |
| LightJason | BDI | Java https://github.com/LightJason/ | 29 December 2020 |
| PLACE | BDI, HTN | ✗ | ✗ |
| PLASA | Wait-Look-Compute-Move | Java ✗ | ✗ |
| RMAS | database-centric, CPS | Matlab/SQLite ✗ | ✗ |
| SARL | DSL | Java https://github.com/sarl/sarl | 4 January 2021 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cardoso, R.C.; Ferrando, A. A Review of Agent-Based Programming for Multi-Agent Systems. Computers 2021, 10, 16. https://doi.org/10.3390/computers10020016
Cardoso RC, Ferrando A. A Review of Agent-Based Programming for Multi-Agent Systems. Computers. 2021; 10(2):16. https://doi.org/10.3390/computers10020016
Chicago/Turabian StyleCardoso, Rafael C., and Angelo Ferrando. 2021. "A Review of Agent-Based Programming for Multi-Agent Systems" Computers 10, no. 2: 16. https://doi.org/10.3390/computers10020016
APA StyleCardoso, R. C., & Ferrando, A. (2021). A Review of Agent-Based Programming for Multi-Agent Systems. Computers, 10(2), 16. https://doi.org/10.3390/computers10020016