
Enhancing Robots Navigation in Internet of Things Indoor Systems

 ,
, 
 ,
,  , and
, and
Abstract
:1. Introduction
- An improved and novel algorithm is proposed for the detection and avoidance of local minima.
- The proposed algorithm encompasses five approaches to effectively avoid obstacles, including V-shaped, double U-shaped, C-shaped, and cluttered environments, without falling into the local minima. Mainly, the approaches involve changing the target point temporarily and placing a virtual obstacle covering the local minima region in order to force the robot out of deadlock.
- Several experimental works were set up to evaluate the performance of the five proposed approaches. The results indicate that the Local Path Backtracking approach has the best performance among the five proposed approaches, followed by the Reflected Virtual Target approach.
- Additionally, the results demonstrated that the proposed approaches are quite reliable. For instance, in cluttered environments, the time and distance required to reach a destination by a robot were reduced by eight times when compared to other traditional approaches.
- Overall, the simulation results of the proposed system showed an enhancement in the time required to reach the target in most of the five proposed approaches, especially in the wall-following approach.
2. Challenges in Online Path Planning
2.1. Obstacle Avoidance
2.2. Goal Seeking, Loops and Speed
3. Literature Review
4. The Base Navigation System Used in This Work
- Goal-seeking action: which is responsible for taking the robot to the target point. It includes a fuzzy system that finds the appropriate direction in every step.
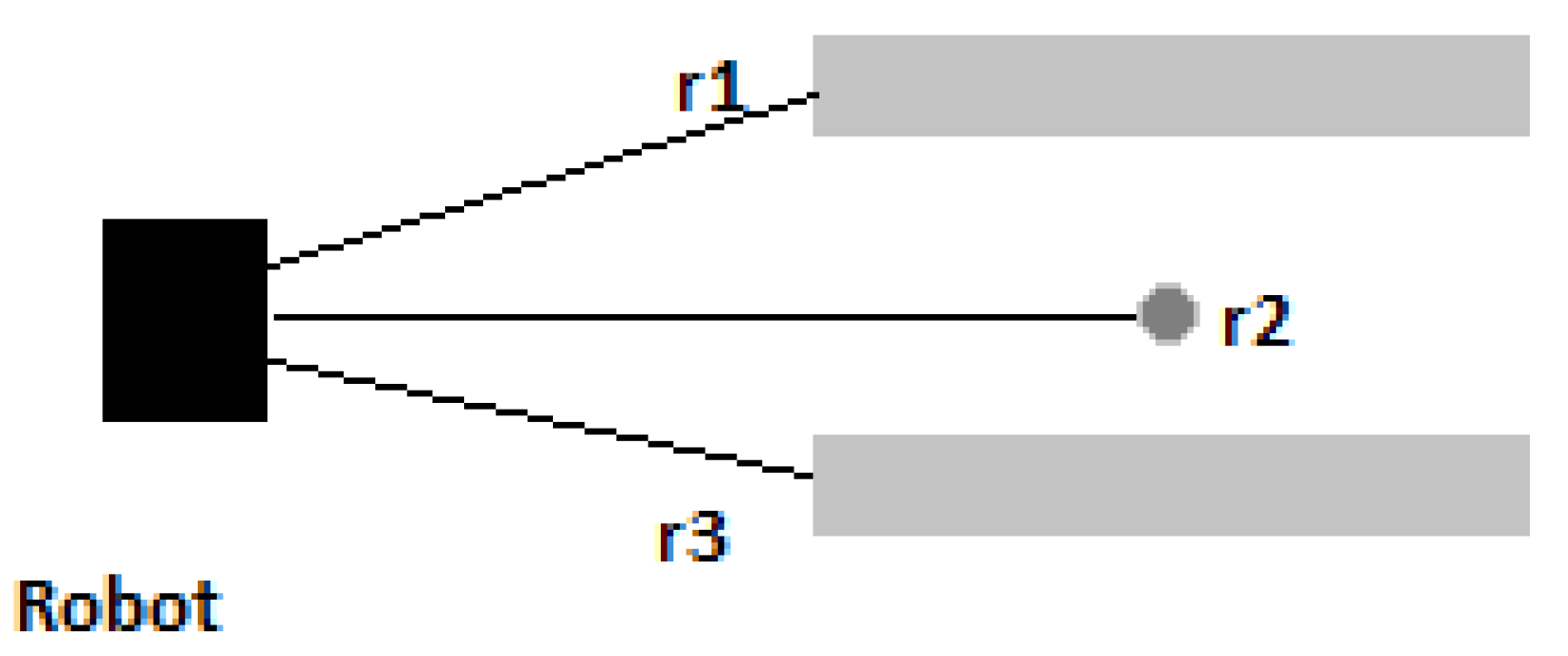
- Obstacle avoidance action: this is responsible for avoiding obstacles. It also depends on a fuzzy system to determine the intensification degree in the difference between the current angle and the angle at which the robot must move to avoid a collision. It depends mainly on how close the robot is to the obstacle. The farther the obstacle is, the smaller will be the angle that the robot has to turn in will be.
- U-turn action: this action is only activated in two cases: during the initialization phase; if the robot front is not facing the target point, then it must make a U-turn by rotating until it faces the target point. The second case is when the robot gets inside a narrow corridor with a dead end. In this case, it rotates to avoid hitting the walls when it tries to get out of the corridor.
- Getting rid of local minima action: this action is activated when a local minima situation is detected during navigation. The detection of the local minima situation is performed by finding the average number of U-turns made within a time; if this ratio is high enough to activate this action, the wall following method is called to take the robot out of the trap. The robot follows the nearest wall it detects and keeps walking close to the wall while overlooking the attraction force of the target point for some time. After that time, the robot returns to the goal-seeking action and disables the wall-following action. If the robot finds that it is again trapped in the same local minima, then the time of wall-following is extended.
5. Addressing the Local Minima Problem by Target Switching
5.1. Environment Perception
- If the cell does not exist in Visited_Cells, then it is added to the vector, and the number of visits for the current cell NV(i) is increased by 1.
- If the cell already exists in the vector, and the robot is still traversing the same cell with multiple steps (i.e., within the same cell’s borders), then do nothing.
- If the cell already exists in the vector, and the robot traverses it for the ith time, then the number of visits for the cell is incremented by 1.
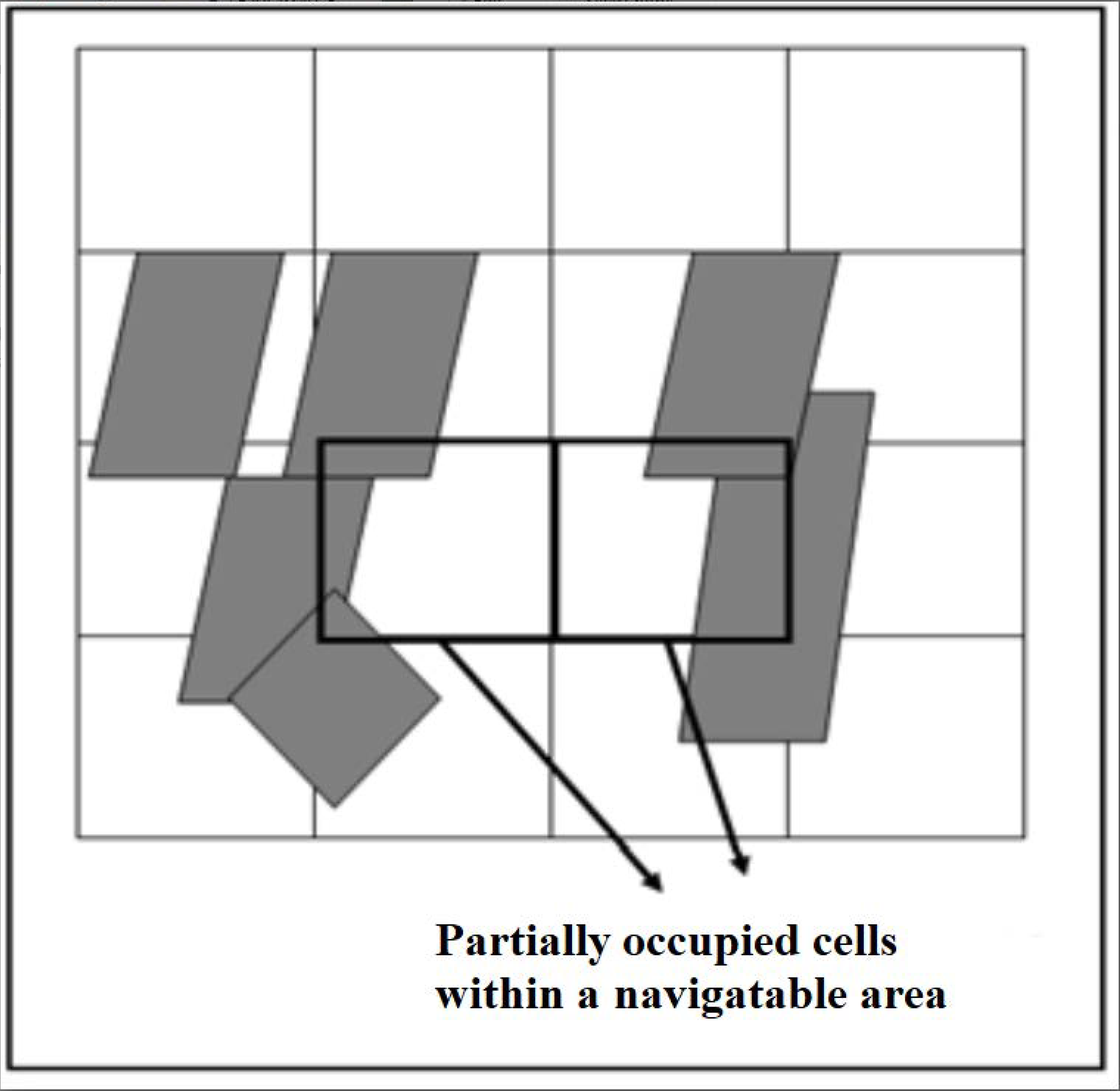
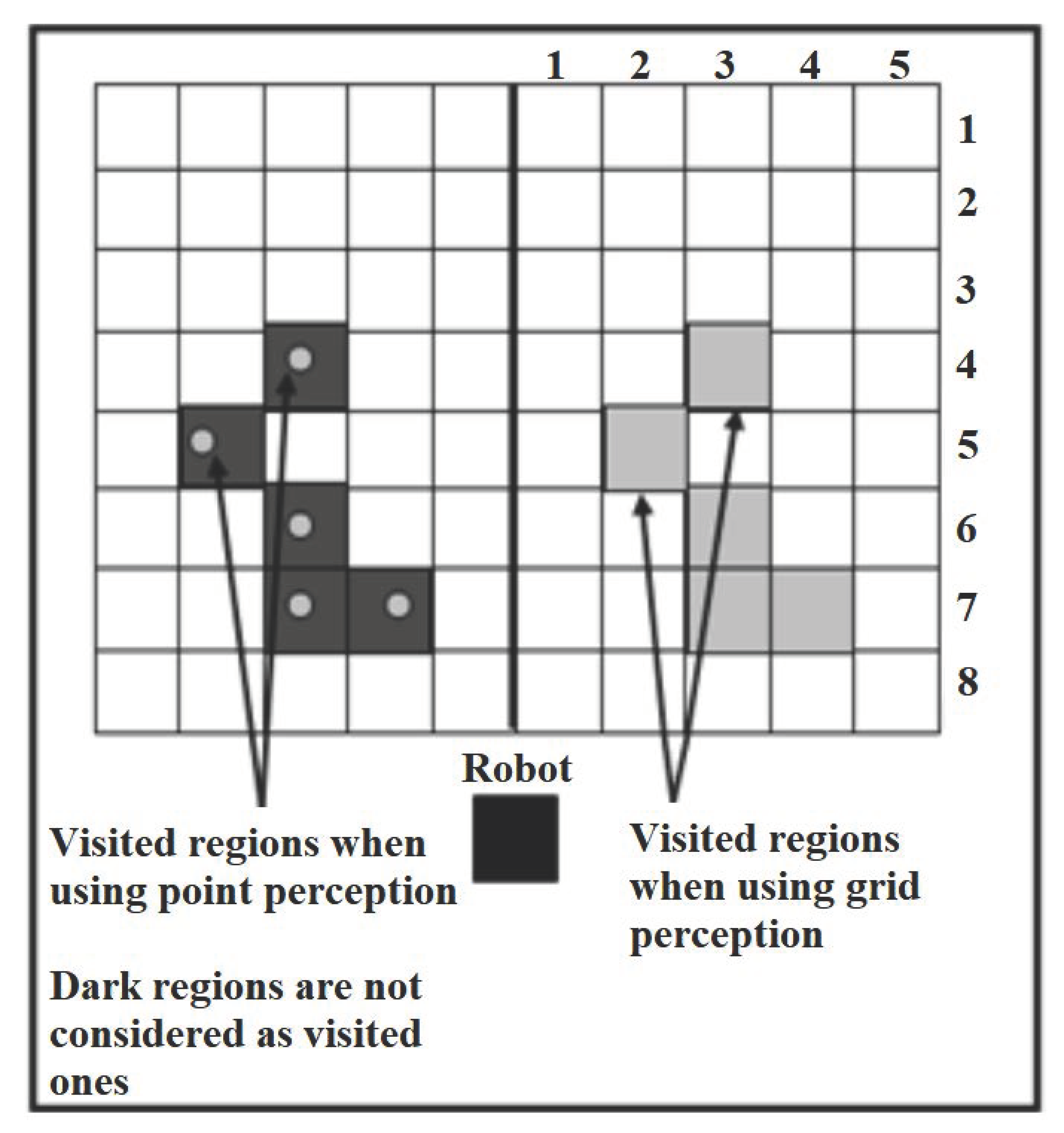
- Initially, the robot does not memorize the occupied cells. The robot cannot be precise in checking whether the place is visited or not depending on point perception (x,y) of the environment, as shown in Figure 2.
- If the robot detects deadlock situations, it needs to remember how many times it visits a region to detect the local minima.
5.2. Local Minima Detection
- Deadlock Detection {Find Intensity, Adjacency, Threshold, Deadlock ChanceIf (Deadlock Chance > Threshold):Call Define DeadlockActivate “get out of trap”}Define Deadlock{ Find the nearest occupied cell N to the robotCenter <– NStack.Push(Center)Stack.length <– 1Repeat until stack.length=0find adjacent cells coordinatesAdjacent[0]=(Center.x−1,Center.y) // leftAdjacent[1]=(Center.x+1,Center.y) // rightAdjacent[2]=(Center.x−1,Center.y−1) //upper leftAdjacent[3]=(Center.x−1,Center.y+1) //lower leftAdjacent[4]=(Center.x,Center.y−1) //upperAdjacent[5]=(Center.x,Center.y+1) //lowerAdjacent[6]=(Center.x+1,Center.y−1) //upper rightAdjacent[7]=(Center.x+1,Center.y+1) //lower rightFor i = 0 To 7: // adjacent cells indexed from 0 to 7if Adjacent[i] is in OccupiedStack.PUSH (cell i)Stack.LengthStack.Length+1Insert cell i into Deadlock-EnclosureNext iCenter <– stack.POPStack.Length <– Stack.Length-1Loop }
5.3. Addressing the Local Minima
5.3.1. Random Virtual Target
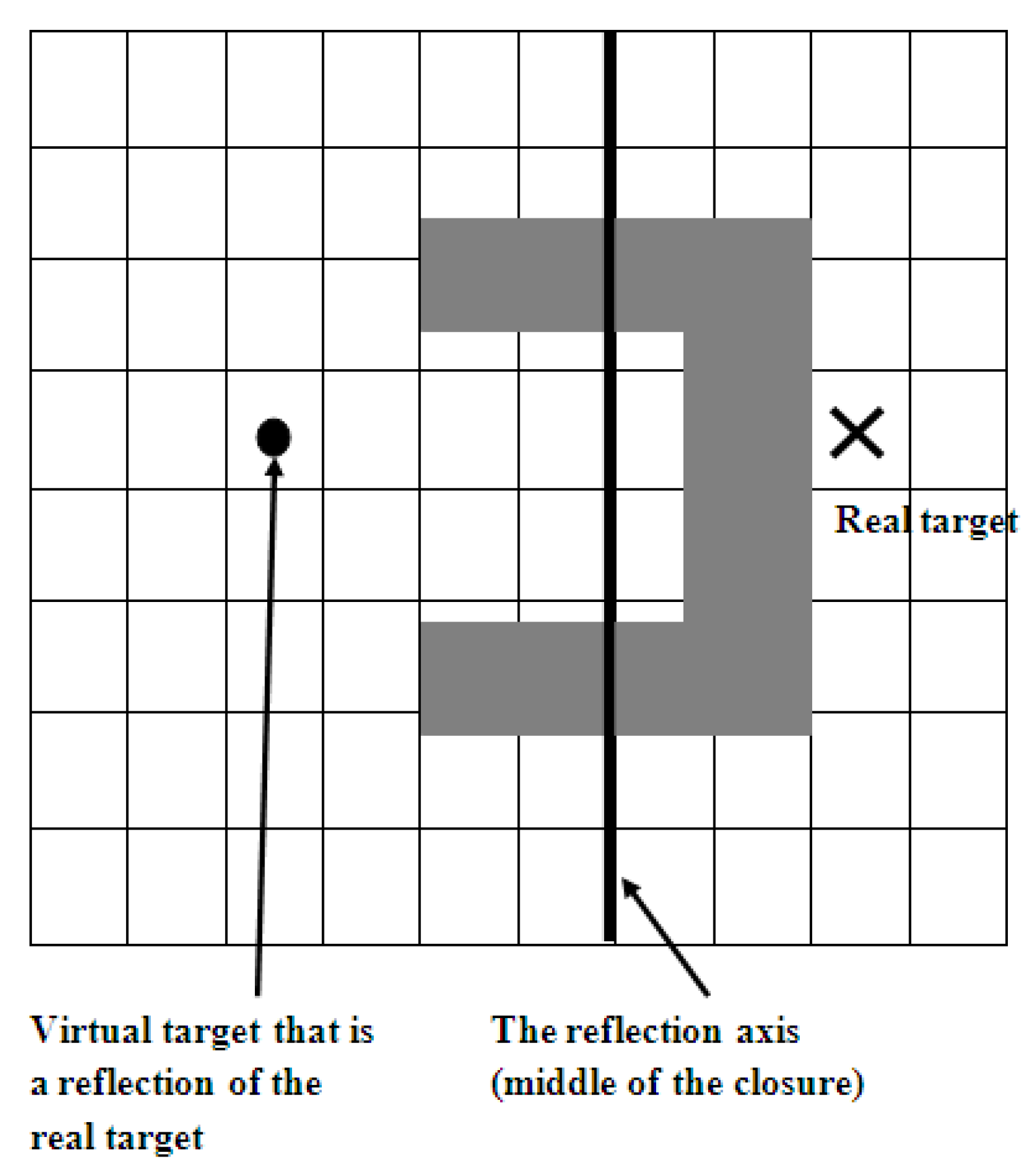
5.3.2. Reflected Virtual Target
5.3.3. Backtracking
- Global Path Backtracking: The stop point is the same as the start point (S) of the navigation. The robot keeps backtracking until it reaches the starting point. This approach is effective in the case of small environments. However, it is inefficient in wide environments because the robot must reach the very distant starting point when it encounters a deadlock. After the robot escapes from the deadlock, and the mode “get out of trap” is disabled, the start point is re-initialized and set as the first cell the robot traverses after closing that deadlock enclosure.
- Half Path Backtracking: The stop point is the midway point between the current locations of the robot and the starting point. This approach is more effective than the previous one in wide environments but less effective in small environments because the stop point could be inside the enclosure of the deadlock.
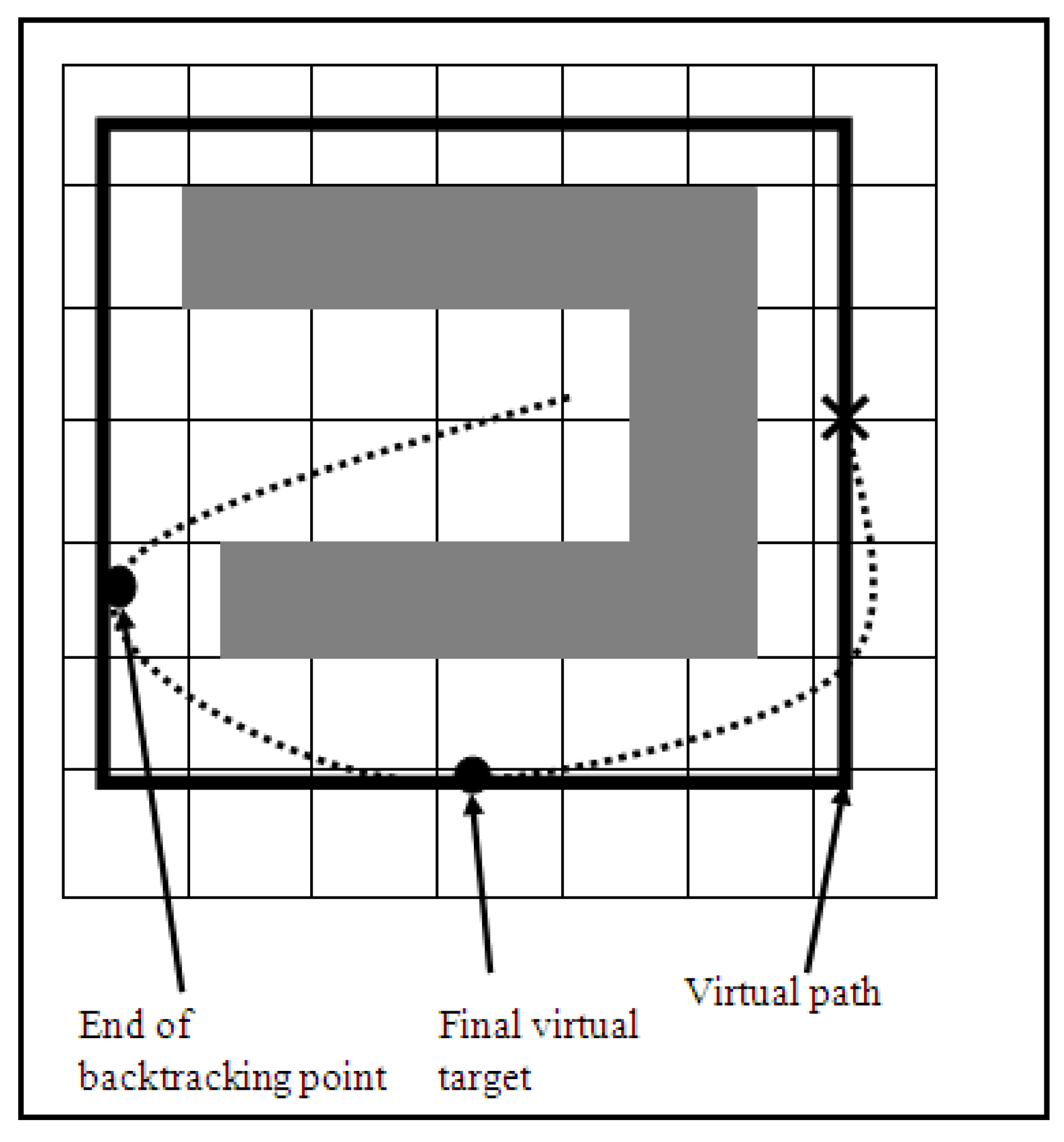
- Local Path Backtracking: The stop point is at the end cells. This one could be the most appropriate choice for the point of “stop backtracking” as it guarantees that the robot will not travel so far. On the other hand, it guarantees the robot is out of the deadlock enclosure. The three approaches for choosing the “stop backtracking” point are shown in Figure 7. After the robot reaches the last virtual target in the sequence, a square virtual path of straight lines is set all around the deadlock enclosure. Then, a final virtual target point is set on this path. The virtual path must pass by the real target point and near the last virtual target from the backtracking sequence, as illustrated in Figure 8. The final virtual target is determined as the middle point of the distance between the robot and the real target. In the case that there is not enough space for the virtual path (i.e., not enough space under or above the enclosure for the robot to move), then the final virtual goal is placed on the opposite side of the square virtual path. Final virtual target placed on the virtual path, guaranteeing that the robot moves towards the real target and away from the deadlock.
5.4. Simulation Results
Local Minima Avoidance
5.5. Speed Control Effect on the Five Proposed Approaches to Address the Local Minima
6. Conclusions and Future Work
6.1. Limitations and Future Work
6.2. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Harapanahalli, S.; Mahony, N.O.; Hernandez, G.V.; Campbell, S.; Riordan, D.; Walsh, J. Autonomous Navigation of mobile robots in factory environment. Procedia Manuf. 2019, 38, 1524–1531. [Google Scholar] [CrossRef]
- Nahavandi, S. Industry 5.0—A Human-Centric Solution. Sustainability 2019, 11, 4371. [Google Scholar] [CrossRef] [Green Version]
- Kaiser, M.S.; Al Mamun, S.; Mahmud, M.; Tania, M.H. Healthcare Robots to Combat COVID-19. In COVID-19: Prediction, Decision-Making, and its Impacts; Santosh, K., Joshi, A., Eds.; Springer: Singapore, 2021; pp. 83–97. [Google Scholar] [CrossRef]
- Fang, B.; Guo, X.; Wang, Z.; Li, Y.; Elhoseny, M.; Yuan, X. Collaborative task assignment of interconnected, affective robots towards autonomous healthcare assistant. Future Gener. Comput. Syst. 2019, 92, 241–251. [Google Scholar] [CrossRef]
- Farid, F.; Elkhodr, M.; Sabrina, F.; Ahamed, F.; Gide, E. A smart biometric identity management framework for personalised IoT and cloud computing-based healthcare services. Sensors 2021, 21, 552. [Google Scholar] [CrossRef]
- Demirhan, M.; Premachandra, C. Development of an Automated Camera-Based Drone Landing System. IEEE Access 2020, 8, 202111–202121. [Google Scholar] [CrossRef]
- Premachandra, C.; Tamaki, M. A Hybrid Camera System for High-Resolutionization of Target Objects in Omnidirectional Images. IEEE Sens. J. 2021, 21, 10752–10760. [Google Scholar] [CrossRef]
- Tashtoush, Y.; Haj-Mahmoud, I. Fuzzy Speed Controller for Mobile Robots Navigation in Unknown Static Environments. In Proceedings of the International Conference on Digital Information Processing, Beijing, China, 21–22 April 2013; p. 139. [Google Scholar]
- Al-Jarrah, O.M.; Tashtoush, Y.M. Mobile robot navigation using fuzzy logic. Intell. Autom. Soft Comput. 2007, 13, 211–228. [Google Scholar] [CrossRef]
- Boldrer, M.; Andreetto, M.; Divan, S.; Palopoli, L.; Fontanelli, D. Socially-Aware Reactive Obstacle Avoidance Strategy Based on Limit Cycle. IEEE Robot. Autom. Lett. 2020, 5, 3251–3258. [Google Scholar] [CrossRef]
- Grover, J.S.; Liu, C.; Sycara, K. Deadlock Analysis and Resolution for Multi-Robot Systems. In Proceedings of the International Workshop on the Algorithmic Foundations of Robotics XIV; Springer International Publishing: Berlin/Heidelberg, Germany, 2021; pp. 294–312. [Google Scholar]
- Mohanty, P.K.; Kodapurath, A.A.; Singh, R.K. A Hybrid Artificial Immune System for Mobile Robot Navigation in Unknown Environments. Iran. J. Sci. Technol. Trans. Electr. Eng. 2020, 44, 1619–1631. [Google Scholar] [CrossRef]
- Wahab, M.N.A.; Nefti-Meziani, S.; Atyabi, A. A comparative review on mobile robot path planning: Classical or meta-heuristic methods? Annu. Rev. Control 2020, 50, 233–252. [Google Scholar] [CrossRef]
- Abiyev, R.; Ibrahim, D.; Erin, B. Navigation of mobile robots in the presence of obstacles. Adv. Eng. Softw. 2010, 41, 1179–1186. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, X.; Meng, W.; Zheng, S.; Jiang, L.; Meng, J.; Wang, S. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot. ISA Trans. 2021, 108, 282–294. [Google Scholar] [CrossRef] [PubMed]
- Cuevas, F.; Castillo, O.; Cortés-Antonio, P. Omnidirectional four wheel mobile robot control with a type-2 fuzzy logic behavior-based strategy. In Intuitionistic and Type-2 Fuzzy Logic Enhancements in Neural and Optimization Algorithms: Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2020; pp. 49–62. [Google Scholar]
- Zhu, A.; Yang, S.X. Neurofuzzy-Based Approach to Mobile Robot Navigation in Unknown Environments. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 610–621. [Google Scholar] [CrossRef]
- Back, S.; Cho, G.; Oh, J.; Tran, X.T.; Oh, H. Autonomous UAV Trail Navigation with Obstacle Avoidance Using Deep Neural Networks. J. Intell. Robot. Syst. 2020, 100, 1195–1211. [Google Scholar] [CrossRef]
- Ben Jabeur, C.; Seddik, H. Design of a PID optimized neural networks and PD fuzzy logic controllers for a two-wheeled mobile robot. Asian J. Control 2021, 23, 23–41. [Google Scholar] [CrossRef]
- Yang, S.; Li, T.; Shi, Q.; Bai, W.; Wu, Y. Artificial Potential-Based Formation Control with Collision and Obstacle Avoidance for Second-order Multi-Agent Systems. In Proceedings of the 2020 7th International Conference on Information, Cybernetics, and Computational Social Systems (ICCSS), Guangzhou, China, 13–15 November 2020; IEEE: Guangzhou, China, 2020; pp. 58–63. [Google Scholar] [CrossRef]
- Receveur, J.B.; Victor, S.; Melchior, P. Autonomous car decision making and trajectory tracking based on genetic algorithms and fractional potential fields. Intell. Serv. Robot. 2020, 13, 315–330. [Google Scholar] [CrossRef]
- Li, C.; Cui, G.; Lu, H. The design of an obstacle avoiding trajectory in unknown environment using potential fields. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 2050–2054. [Google Scholar]
- Csiszar, A.; Drust, M.; Dietz, T.; Verl, A.; Brisan, C. Dynamic and interactive path planning and collision avoidance for an industrial robot using artificial potential field based method. In Mechatronics; Springer: Berlin/Heidelberg, Germany, 2011; pp. 413–421. [Google Scholar]
- Li, G.; Tamura, Y.; Yamashita, A.; Asama, H. Effective improved artificial potential field-based regression search method for autonomous mobile robot path planning. Int. J. Mechatron. Autom. 2013, 3, 141. [Google Scholar] [CrossRef] [Green Version]
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Substantial Capabilities of Robotics in Enhancing Industry 4.0 implementation. Cogn. Robot. 2021, 1, 58–75. [Google Scholar] [CrossRef]
- Barosz, P.; Gołda, G.; Kampa, A. Efficiency Analysis of Manufacturing Line with Industrial Robots and Human Operators. Appl. Sci. 2020, 10, 2862. [Google Scholar] [CrossRef] [Green Version]
- Carrasco, P.; Cuesta, F.; Caballero, R.; Perez-Grau, F.J.; Viguria, A. Multi-Sensor Fusion for Aerial Robots in Industrial GNSS-Denied Environments. Appl. Sci. 2021, 11, 3921. [Google Scholar] [CrossRef]
- Rogowski, A.; Skrobek, P. Object Identification for Task-Oriented Communication with Industrial Robots. Sensors 2020, 20, 1773. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Le, A.V.; Nhan, N.H.K.; Mohan, R.E. Evolutionary Algorithm-Based Complete Coverage Path Planning for Tetriamond Tiling Robots. Sensors 2020, 20, 445. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krishna, K.M.; Kalra, P.K. Solving the local minima problem for a mobile robot by classification of spatio-temporal sensory sequences. J. Robot. Syst. 2000, 17, 549–564. [Google Scholar] [CrossRef]
- Nurmaini, S. Intelligent navigation in unstructured environment by using memory-based reasoning in embedded mobile robot. Eur. J. Sci. Res. 2012, 72, 228–244. [Google Scholar]
- Ordonez, C.; Collins, E.G.; Selekwa, M.F.; Dunlap, D.D. The virtual wall approach to limit cycle avoidance for unmanned ground vehicles. Robot. Auton. Syst. 2008, 56, 645–657. [Google Scholar] [CrossRef]
- Um, D.; Ryu, D.; Kang, S. A framework for unknown environment manipulator motion planning via model based realtime rehearsal. In Intelligent Autonomous Systems 12; Springer: Berlin/Heidelberg, Germany, 2013; pp. 623–631. [Google Scholar]
- Taylor, K.; LaValle, S.M. I-Bug: An intensity-based bug algorithm. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3981–3986. [Google Scholar]
- Lumelsky, V.; Stepanov, A. Dynamic path planning for a mobile automaton with limited information on the environment. IEEE Trans. Autom. Control 1986, 31, 1058–1063. [Google Scholar] [CrossRef]
- Sanchez, G.M.; Giovanini, L.L. Autonomous navigation with deadlock detection and avoidance. In Sociedad Iberoamericana de Inteligencia Artificial; CONICET: Buenos Aires, Argentina, 2014. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constant-Speed Robot | Speed: 0.5 m/s | Fuzzy-Speed Robot | Speed: 0–1 m/s |
| Step length: 0.1 m | Step length: 0.0375–0.2125 m | ||
| Step time: 200 ms | Step time: 200 ms | ||
| Sensing range: 4 m | Sensing range: 4 m | ||
| Simulation Environment | Robot size: 0.7 × 0.7 m | ||
| Environment area: 14 × 24 m | |||
| Operating System: Microsoft Windows |
| Approach Testcase | Random | Reflected Virtual Target | Global Path Backtracking | Half Path Backtracking | Local Path Backtracking | Wall-Following |
|---|---|---|---|---|---|---|
| C-shaped | 55 | 45 | 59 | 101 | 59 | 1915 |
| Double U-shaped | 97 | 88 | 100 | 110 | 96 | 466 |
| V-shaped | 38 | 27 | 29 | 31 | 28 | 111 |
| Cluttered | 46 | 47 | 55 | 47 | 52 | 436 |
| Average | 59 | 66.25 | 60.75 | 72.25 | 58.75 | 732 |
| Approach Testcase | Random | Reflected Virtual Target | Global Path Backtracking | Half Path Backtracking | Local Path Backtracking | Wall-Following |
|---|---|---|---|---|---|---|
| C-shaped | 110.2 | 89.2 | 118.8 | 202.8 | 118.8 | 1600 |
| Double U-shaped | 194.6 | 176 | 200 | 219.6 | 192.6 | 932.4 |
| V-shaped | 75 | 53.6 | 57.8 | 62.2 | 55.4 | 221.4 |
| Cluttered | 91.8 | 94.8 | 109 | 94.8 | 104 | 872.2 |
| Average | 117.9 | 103.4 | 121.4 | 144.85 | 117.7 | 906.5 |
| Approach Testcase | Random | Reflected Virtual Target | Global Path Backtracking | Half Path Backtracking | Local Path Backtracking | Wall-Following |
|---|---|---|---|---|---|---|
| C-shaped | 96.8 | 71.8 | 98.6 | 223.2 | 97.8 | 80 |
| Double U-shaped | 75.6 | 149.6 | 104.4 | 223.6 | 252.2 | 169.8 |
| V-shaped | 83.2 | 48 | 54.6 | 59.6 | 51.2 | 400.4 |
| Cluttered | 127.6 | 105 | 132 | 88.4. | 132. | 1378.8 |
| Average | 95.8 | 93.6 | 97.4 | 168.8 | 133.3 | 507.25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tashtoush, Y.; Haj-Mahmoud, I.; Darwish, O.; Maabreh, M.; Alsinglawi, B.; Elkhodr, M.; Alsaedi, N. Enhancing Robots Navigation in Internet of Things Indoor Systems. Computers 2021, 10, 153. https://doi.org/10.3390/computers10110153
Tashtoush Y, Haj-Mahmoud I, Darwish O, Maabreh M, Alsinglawi B, Elkhodr M, Alsaedi N. Enhancing Robots Navigation in Internet of Things Indoor Systems. Computers. 2021; 10(11):153. https://doi.org/10.3390/computers10110153
Chicago/Turabian StyleTashtoush, Yahya, Israa Haj-Mahmoud, Omar Darwish, Majdi Maabreh, Belal Alsinglawi, Mahmoud Elkhodr, and Nasser Alsaedi. 2021. "Enhancing Robots Navigation in Internet of Things Indoor Systems" Computers 10, no. 11: 153. https://doi.org/10.3390/computers10110153
APA StyleTashtoush, Y., Haj-Mahmoud, I., Darwish, O., Maabreh, M., Alsinglawi, B., Elkhodr, M., & Alsaedi, N. (2021). Enhancing Robots Navigation in Internet of Things Indoor Systems. Computers, 10(11), 153. https://doi.org/10.3390/computers10110153