Analytical Model and Experimental Evaluation of the Micro-Scale Thermal Property Sensor for Single-Sided Measurement


Abstract
:1. Introduction
2. Principle
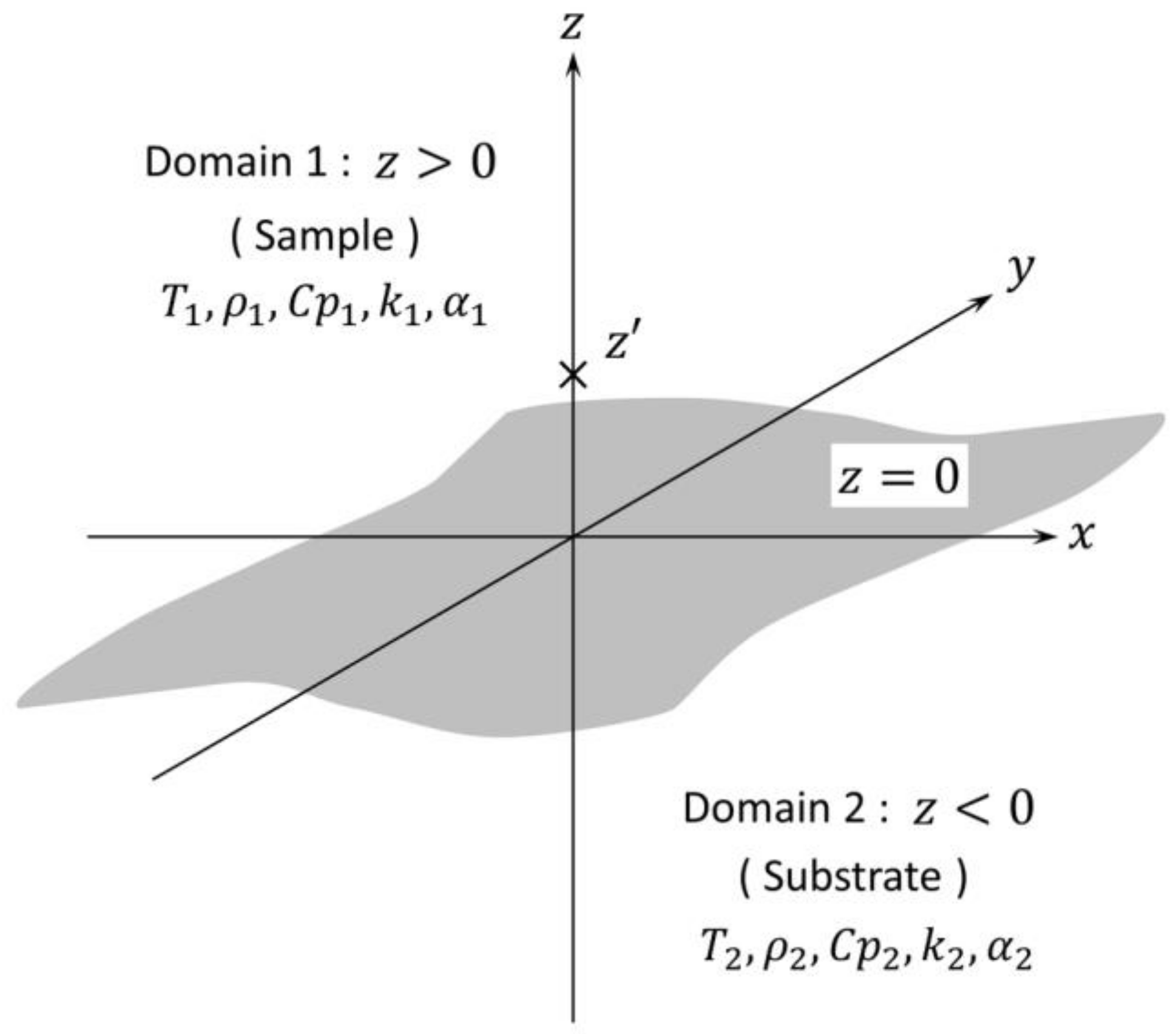
2.1. The B.M.W. Solution for the Condition That the Heat Source Is on the Interface
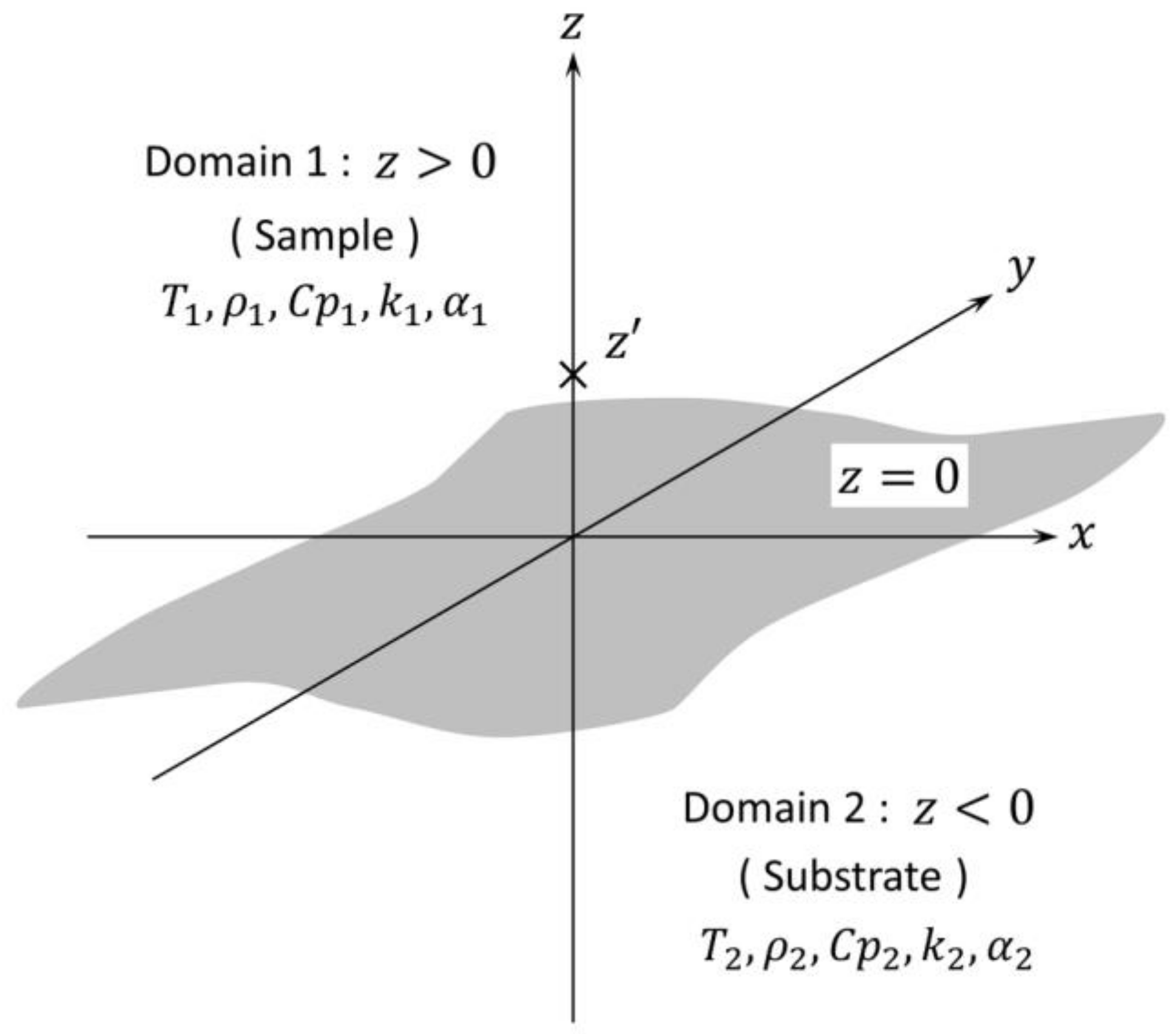
2.2. The Continuous Rectangle Heat Source Solution on the Interface of Two Semi-Infinite Domains
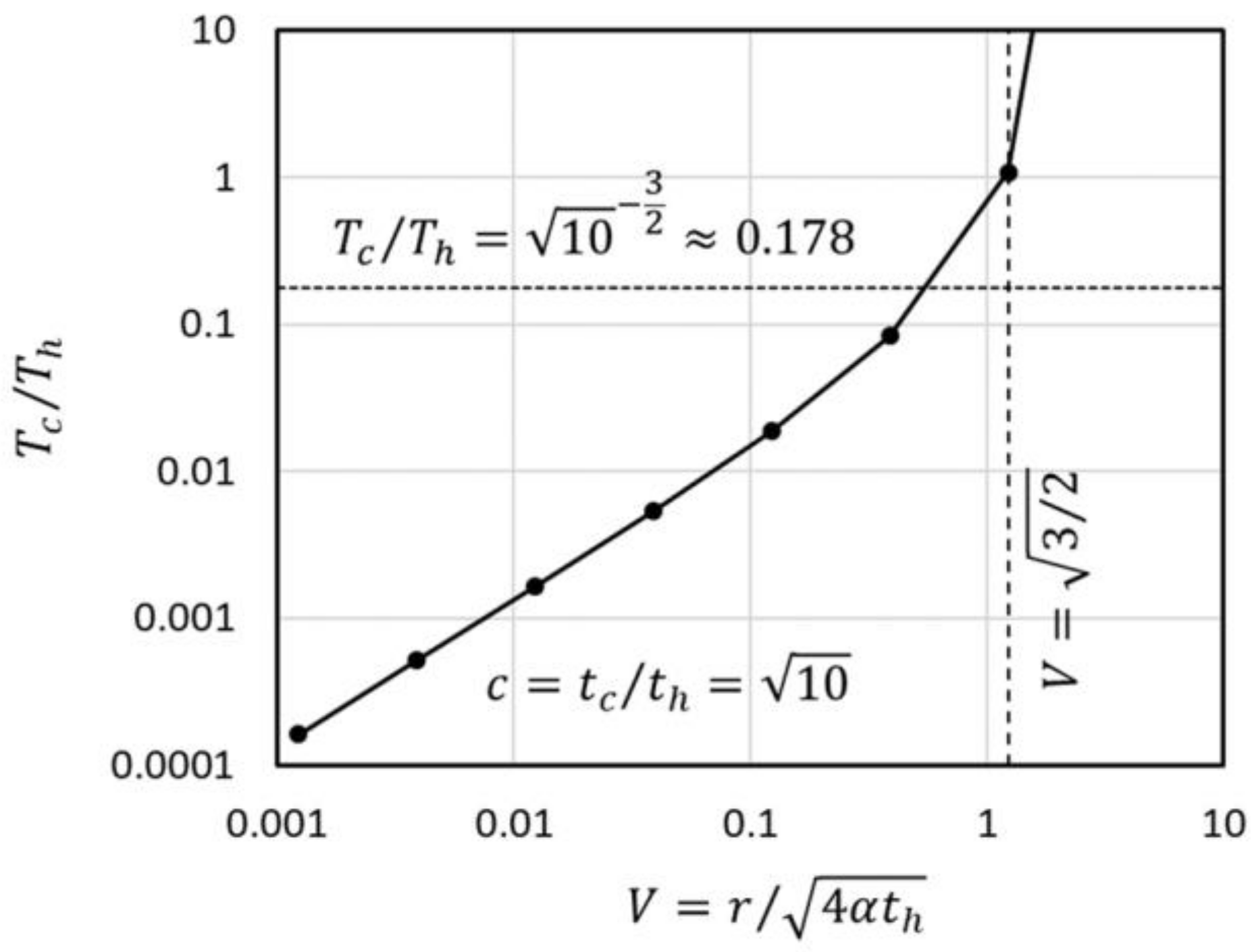
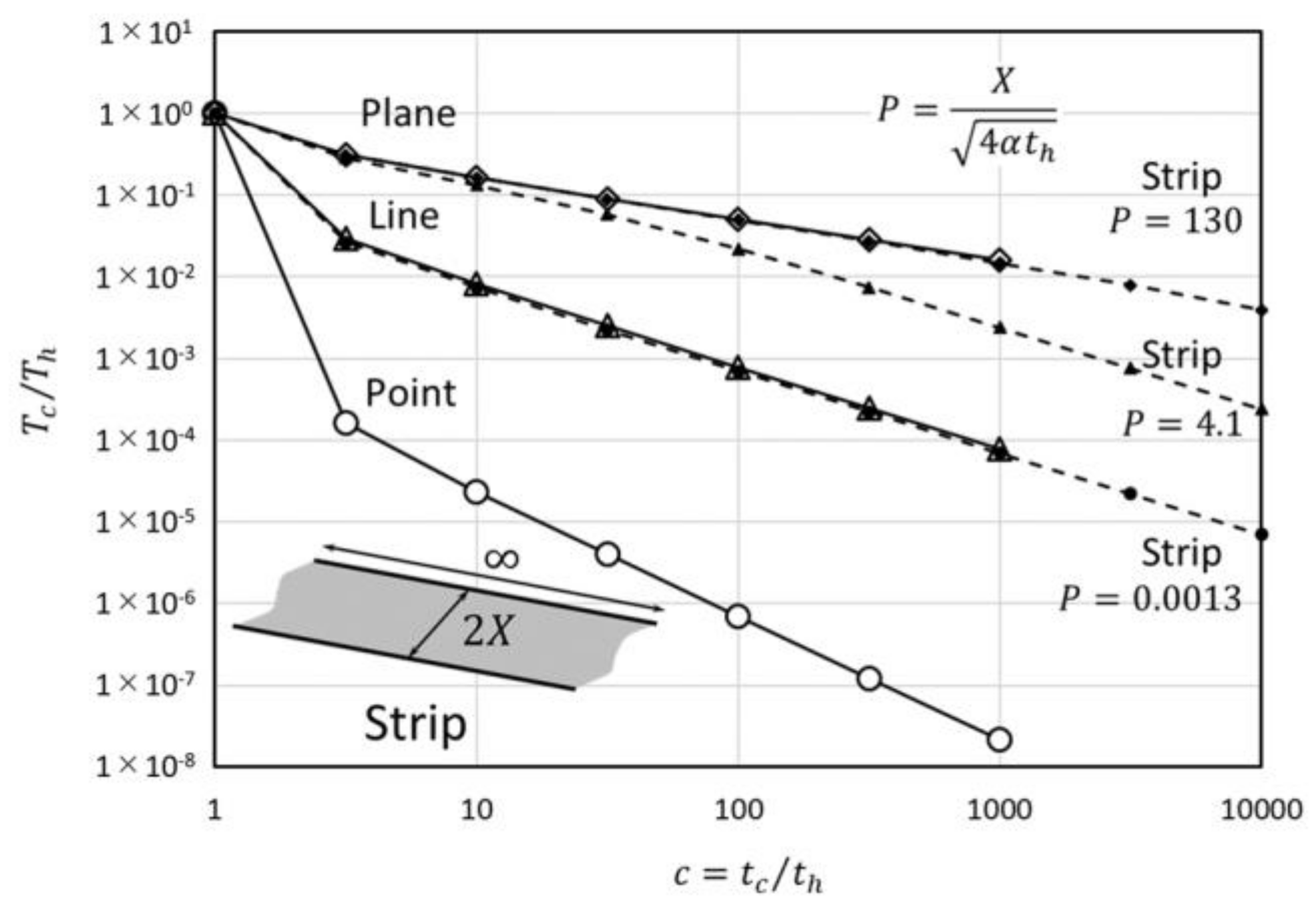
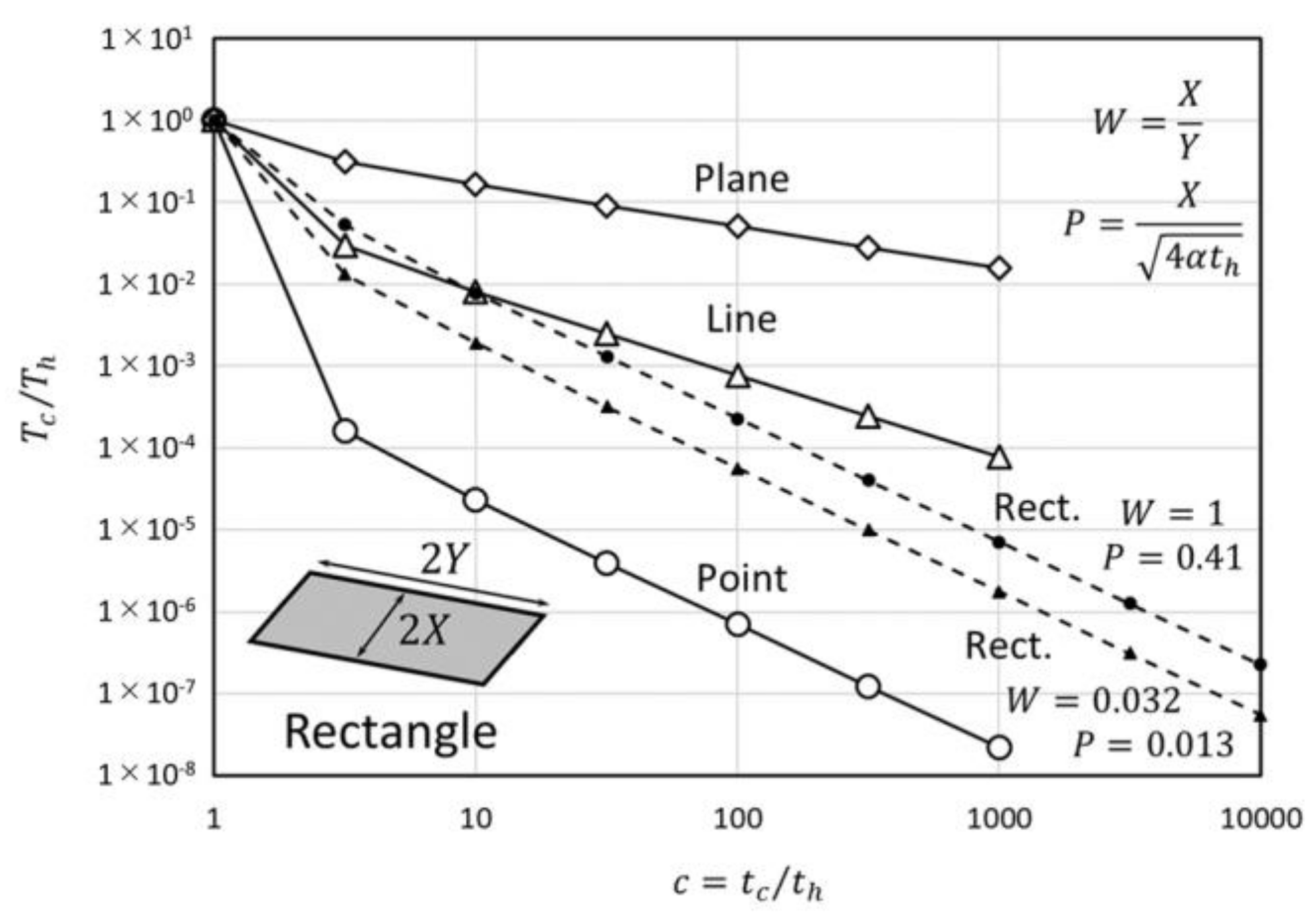
2.3. Dissipation of the Injected Heat
3. Materials and Methods
3.1. General Description
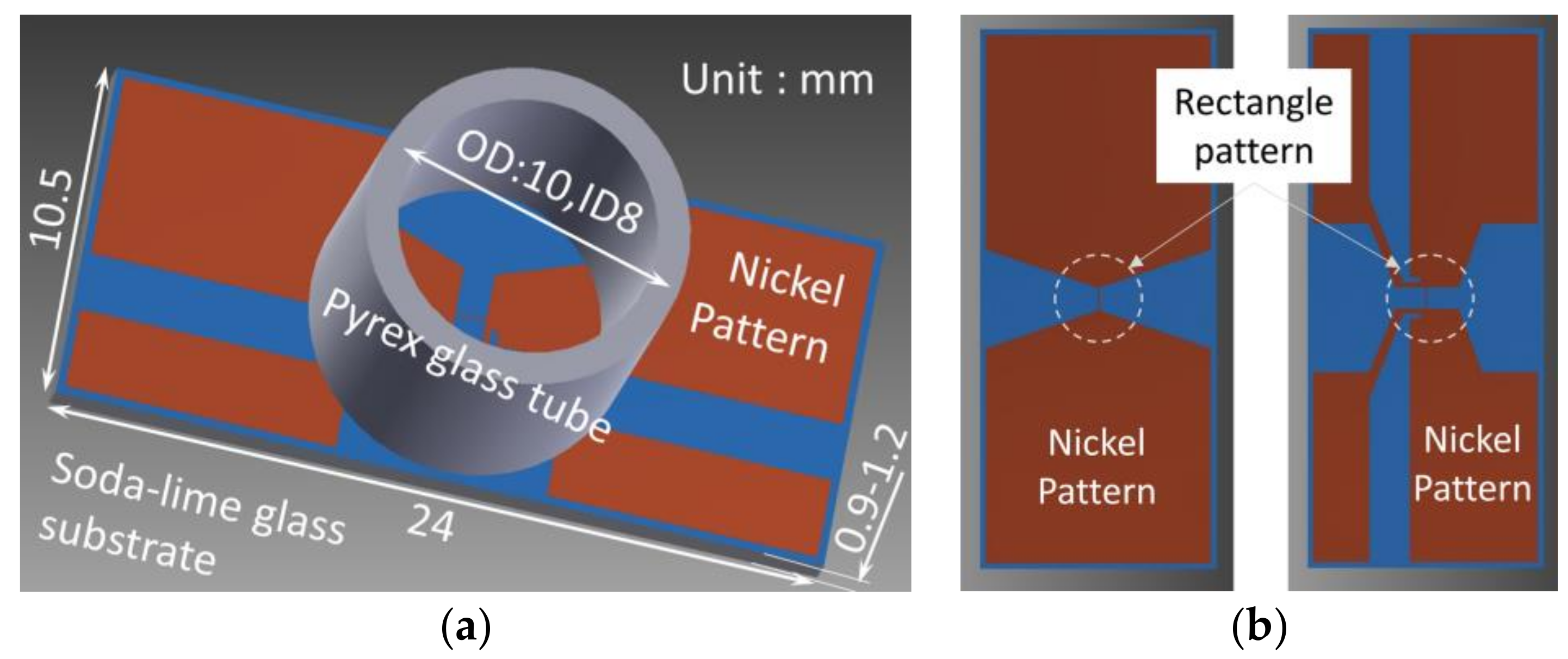
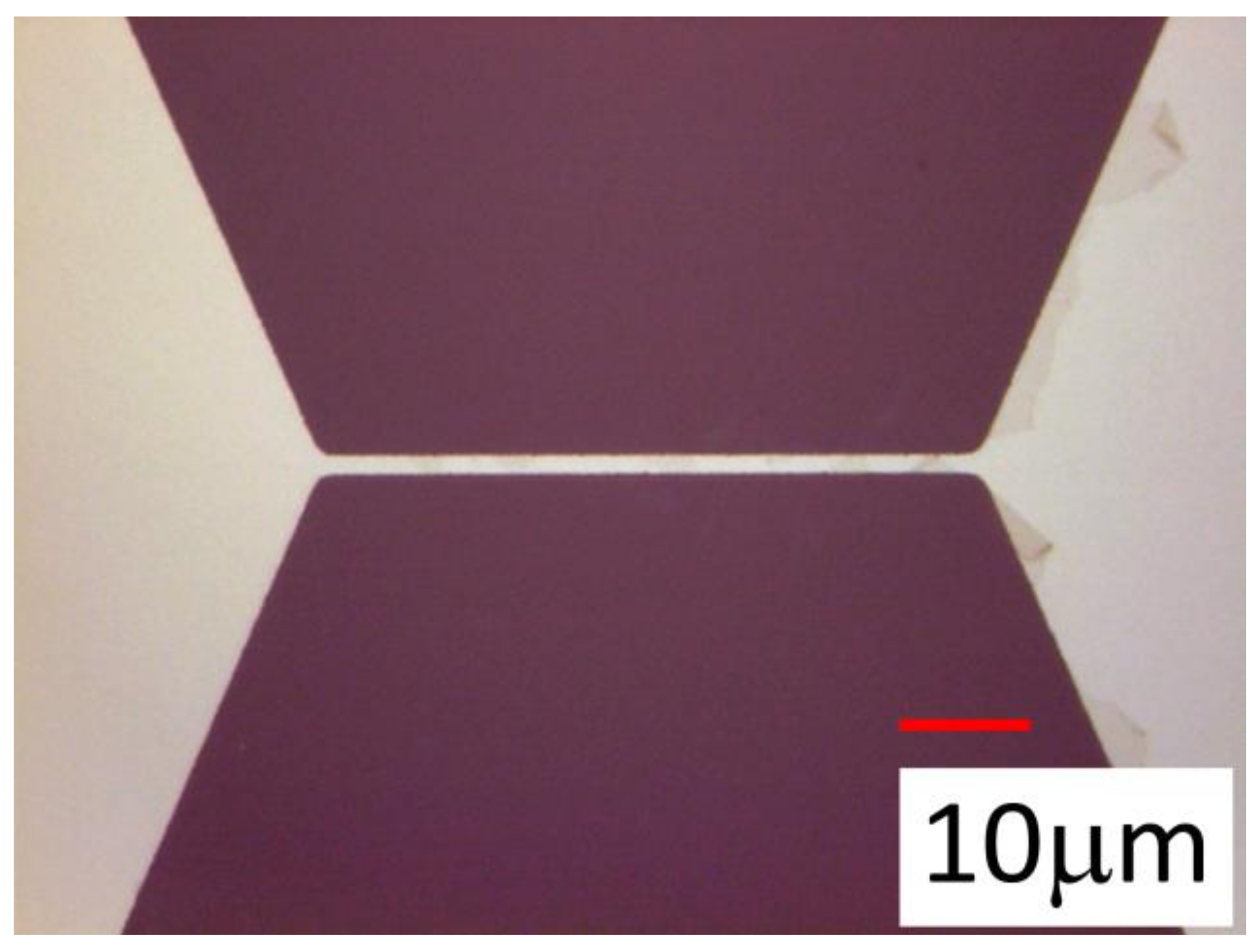
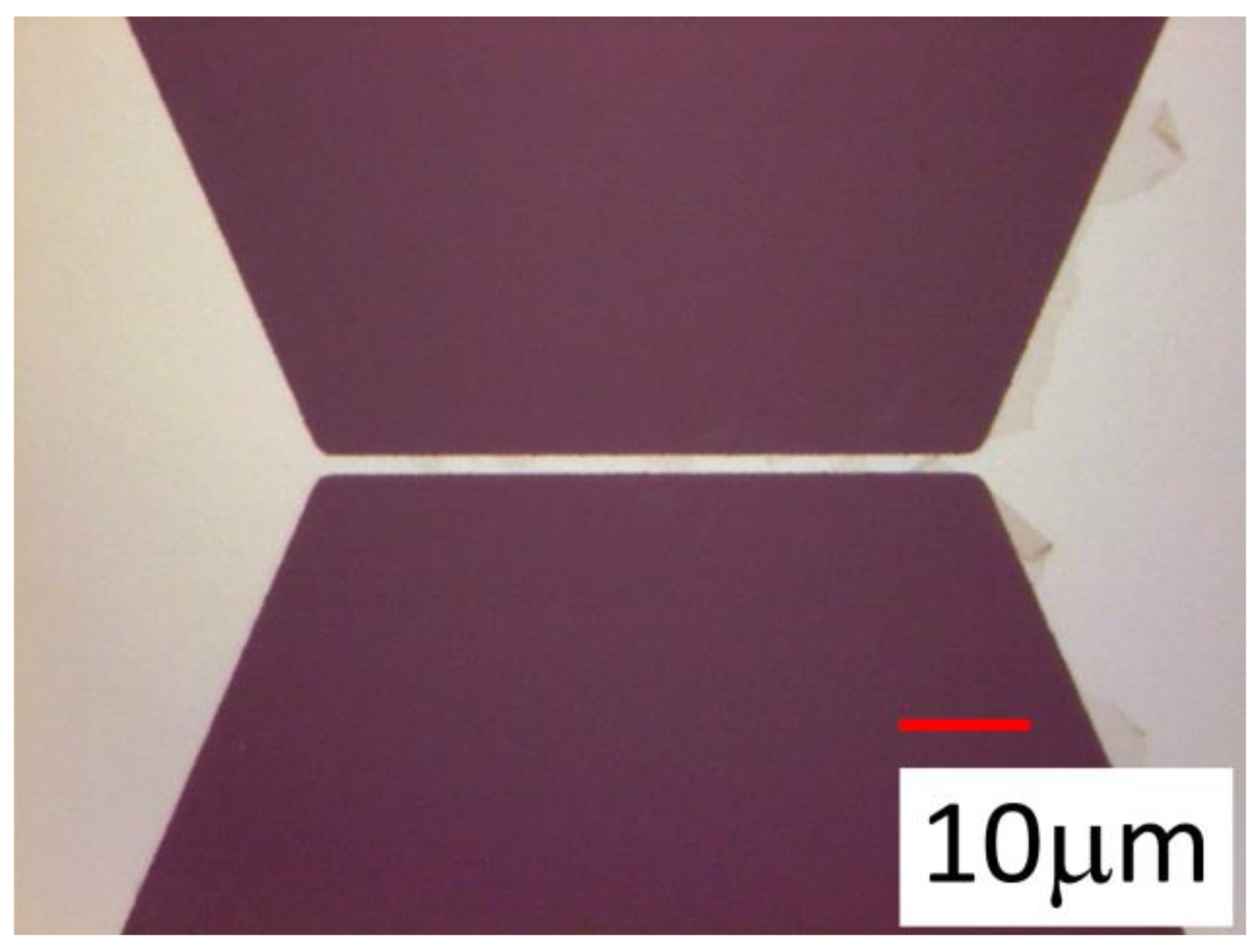
3.2. Design and Fabrication of the Sensor Device
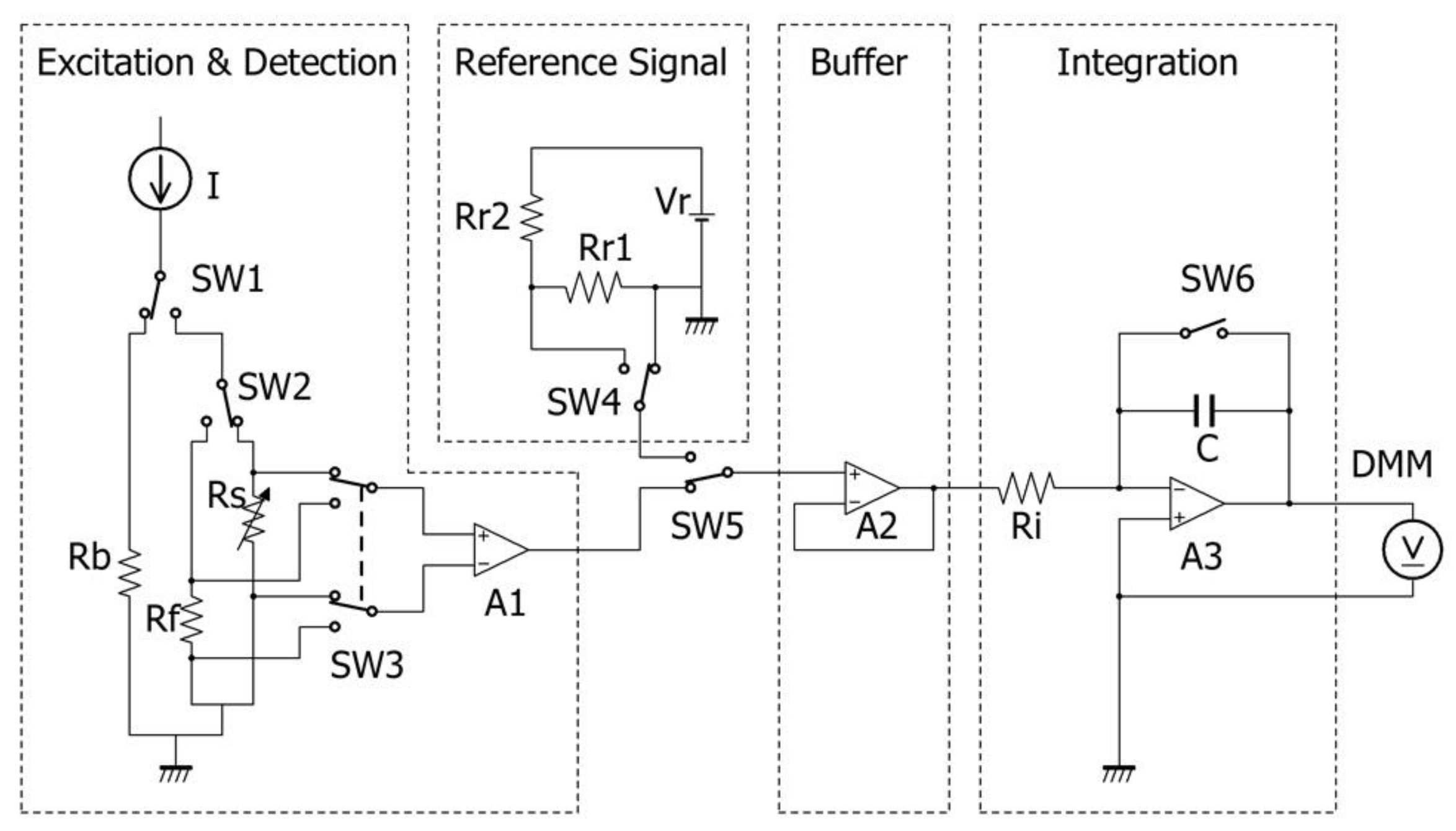
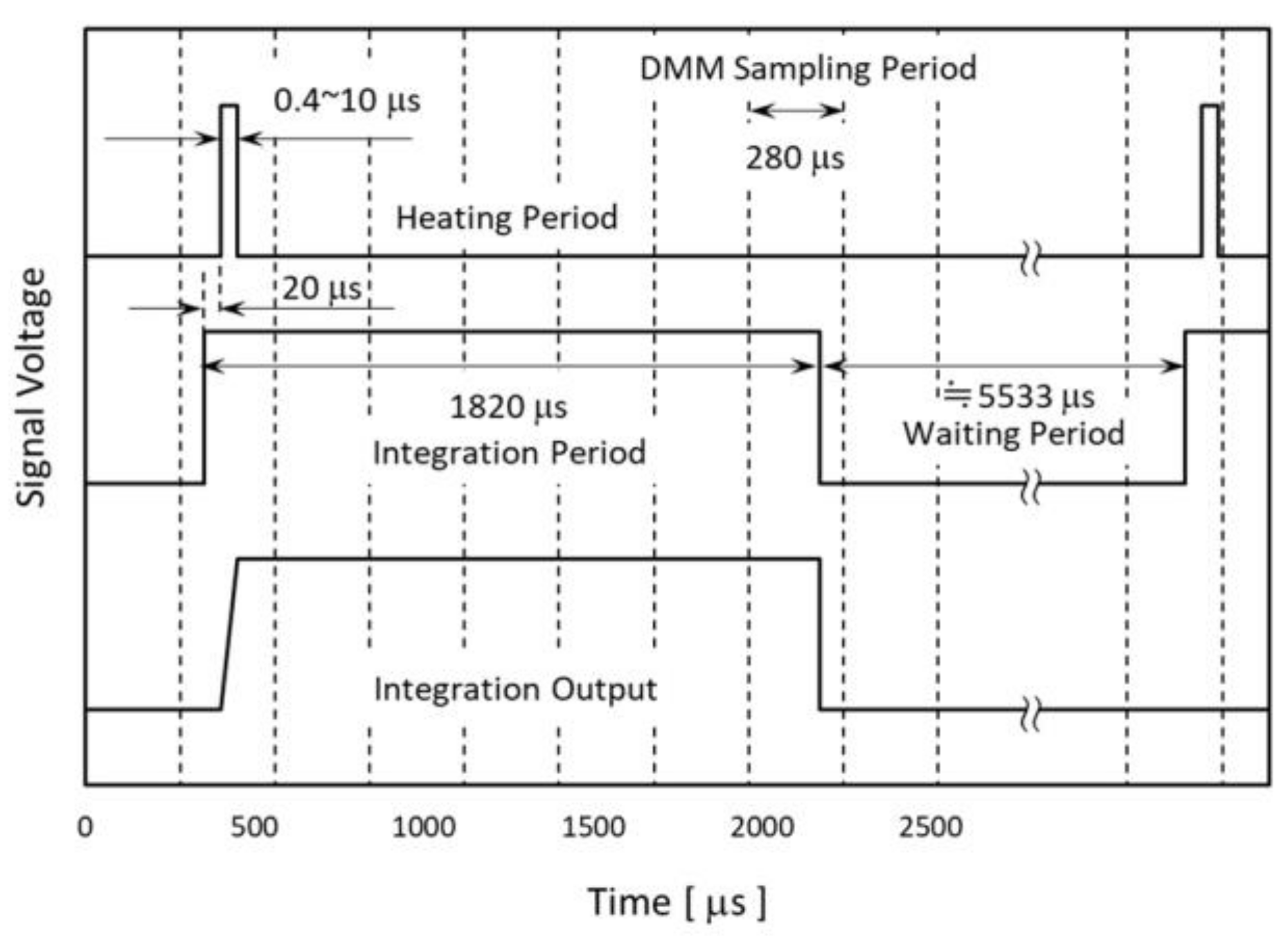
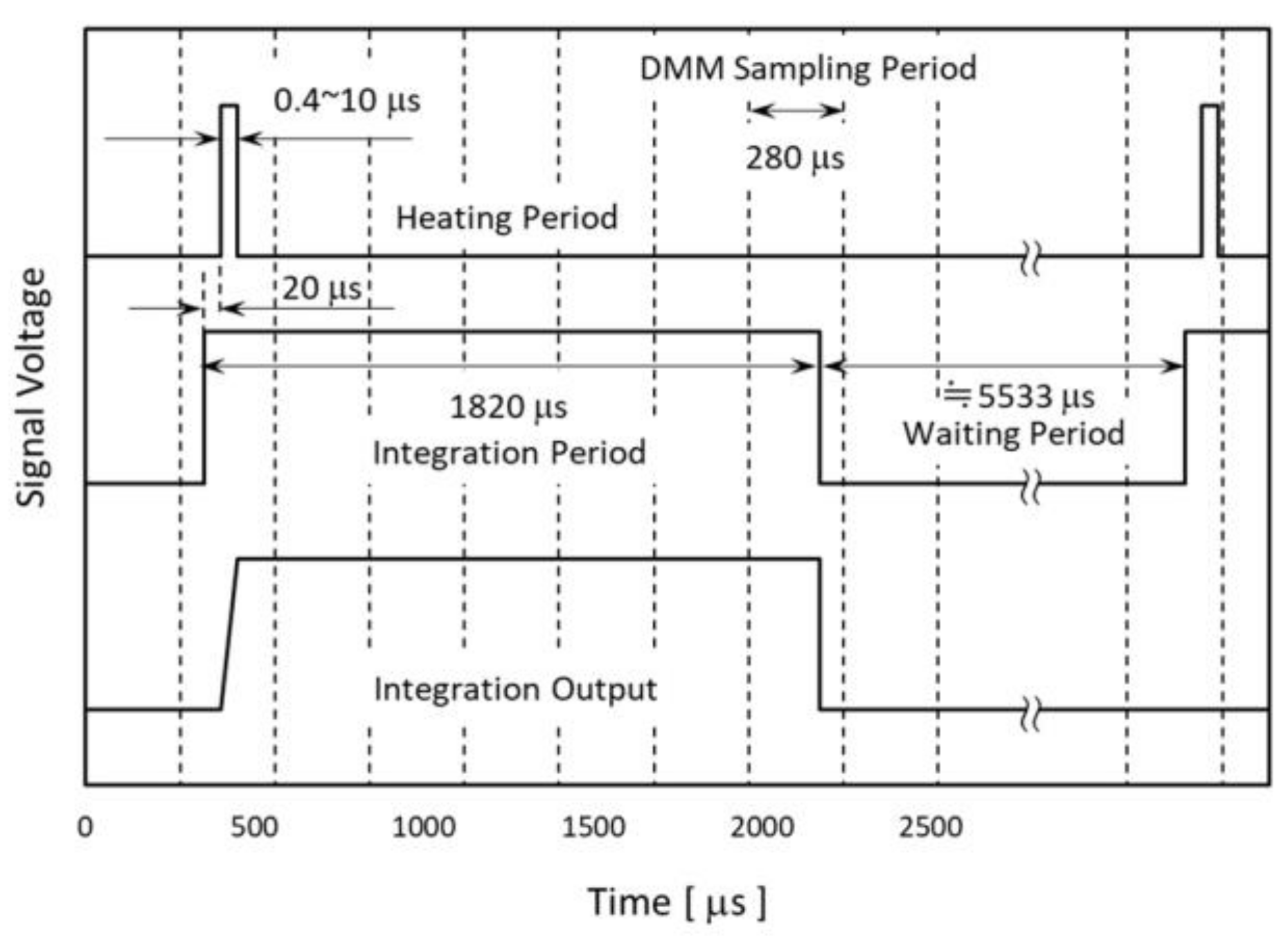
3.3. Detection Circuit
3.4. Instrumentation
3.5. Measurement Sample
4. Results and Discussion
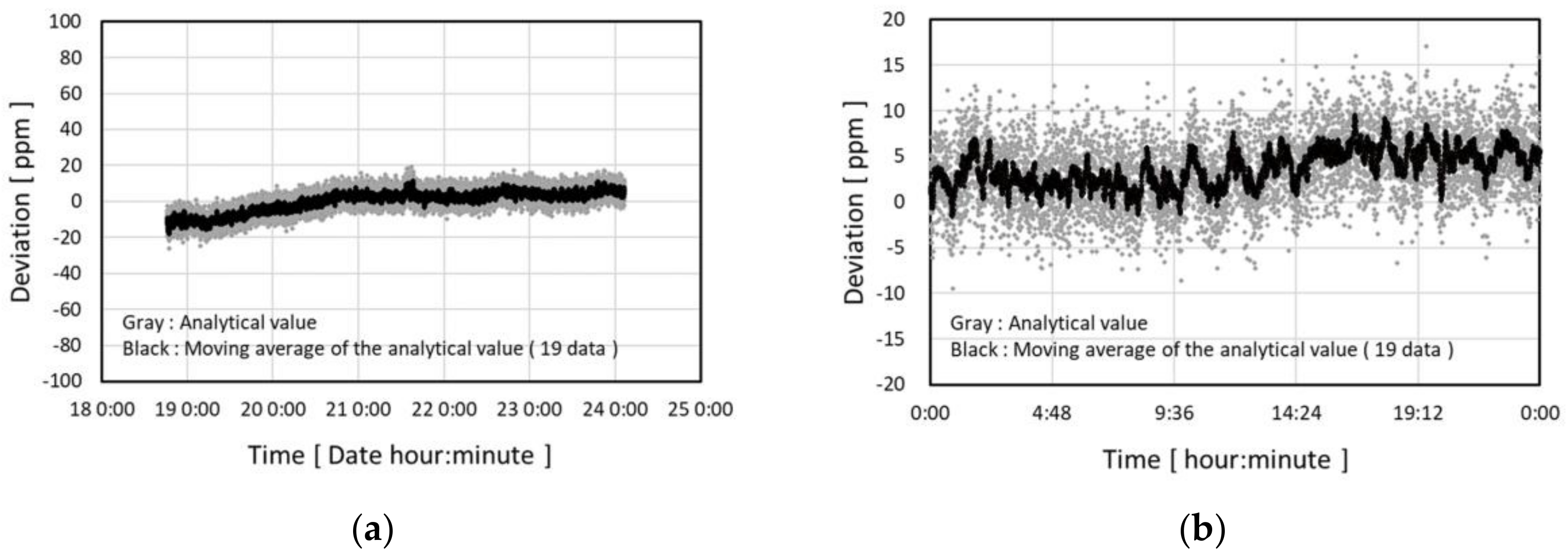
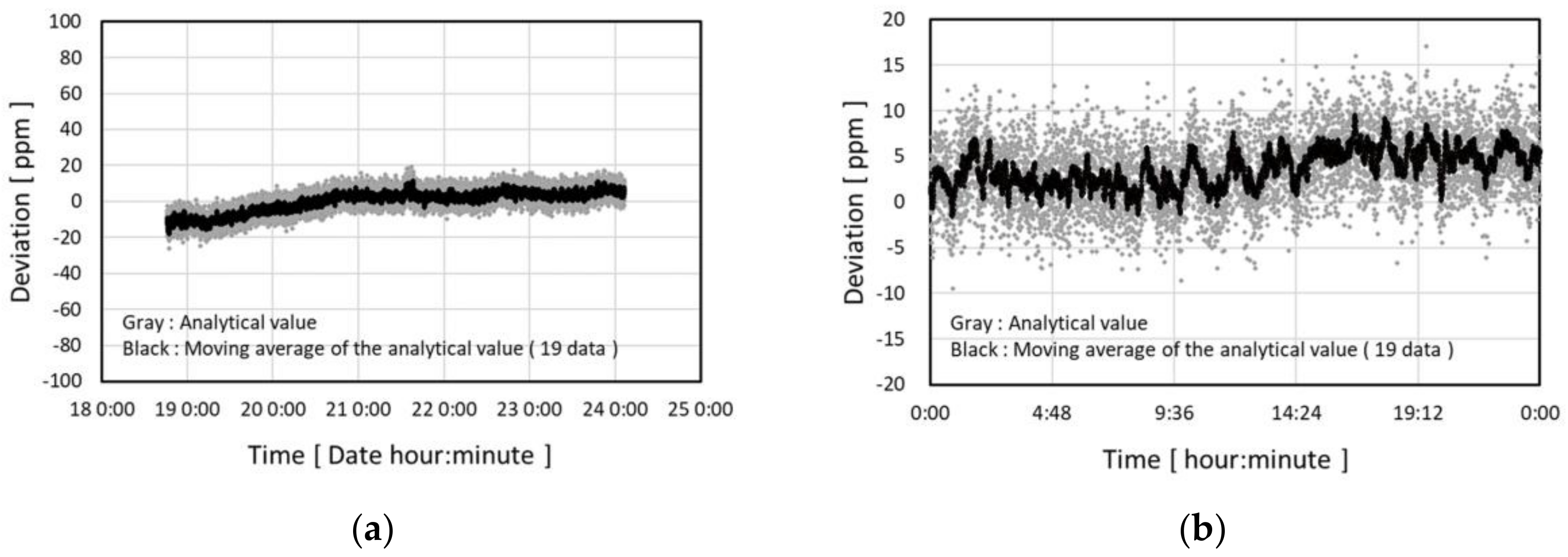
4.1. Evaluation Results of the Detection Circuit Stability
4.2. Evaluation Results of the Sensor Characteristics
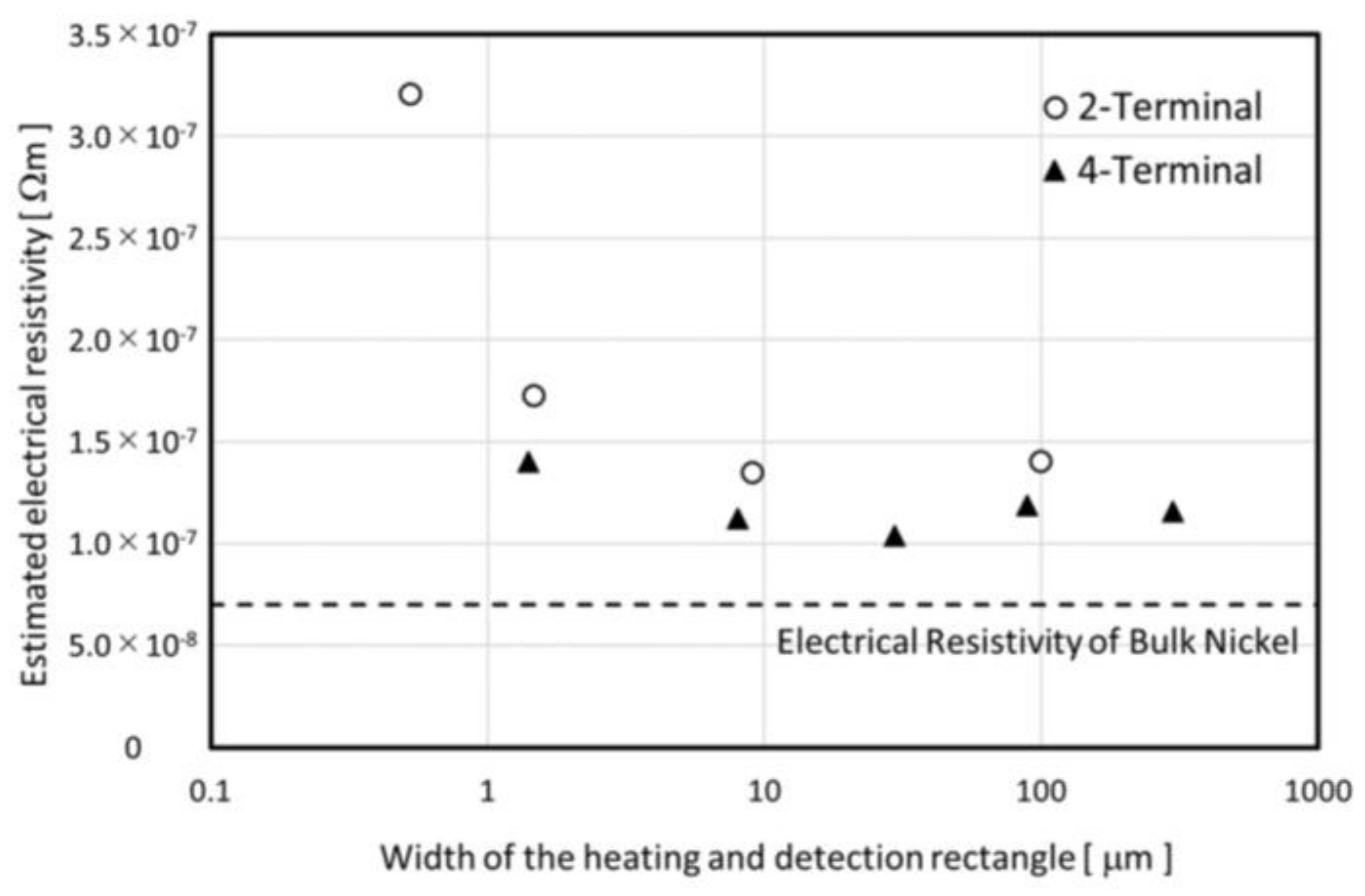
4.2.1. Electrical Resistance of the Rectangular Patterns
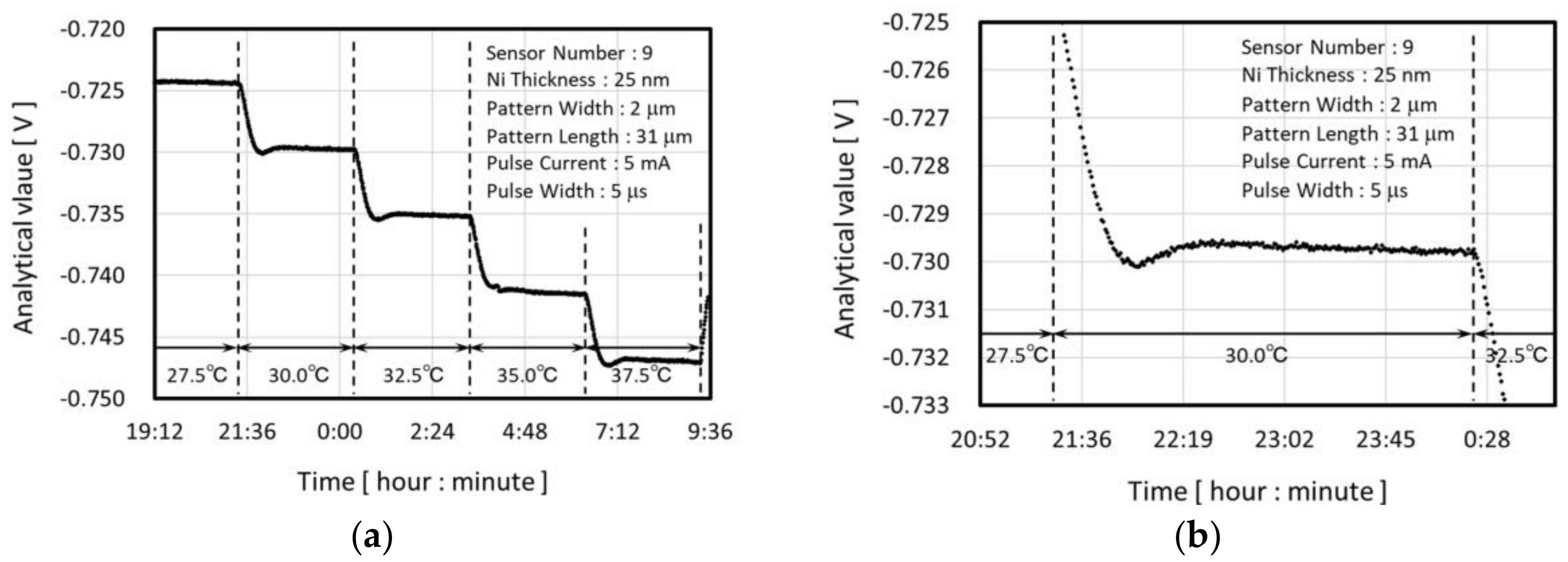
4.2.2. Temperature Coefficient of the Sensor Resistance
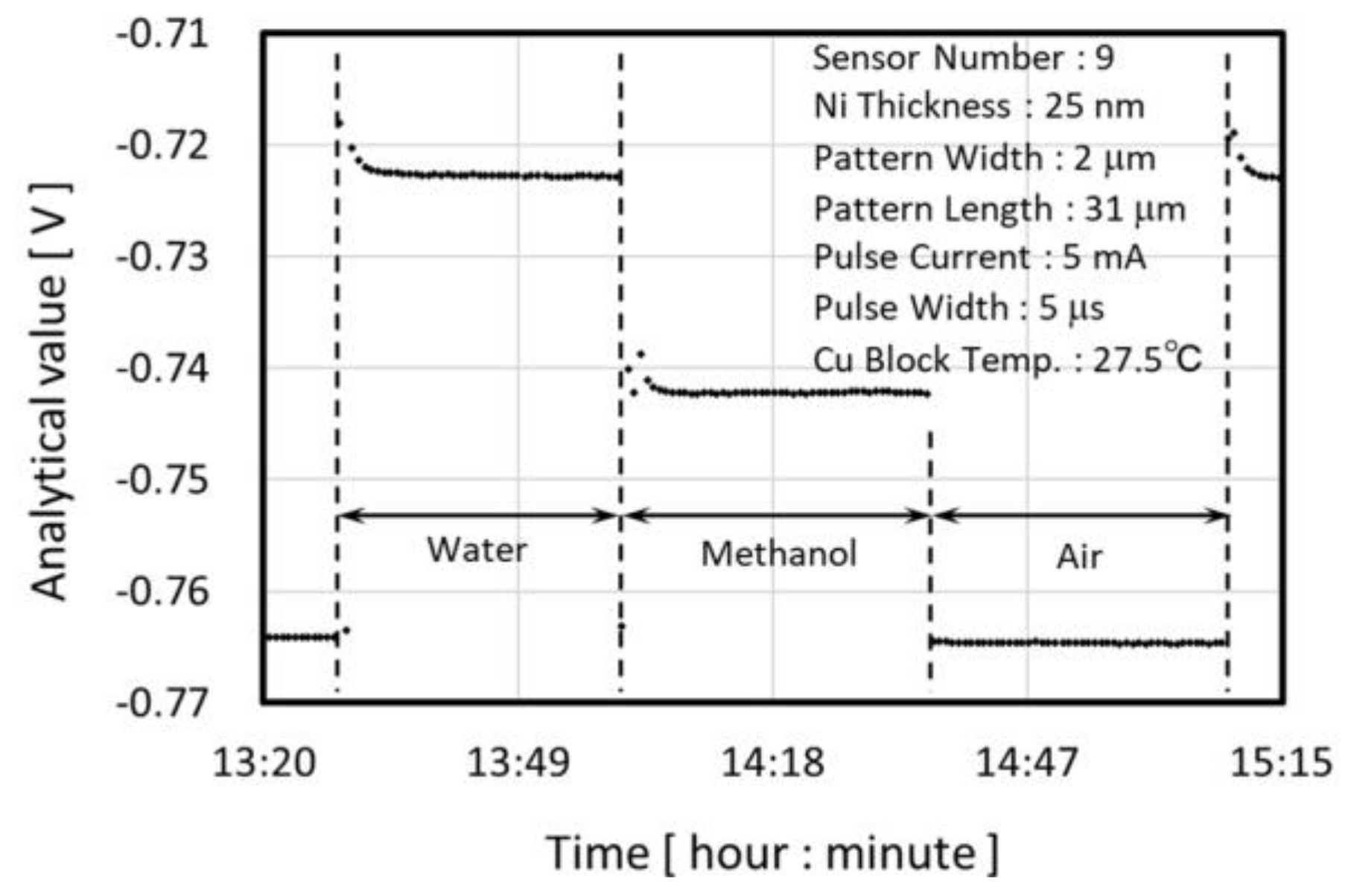
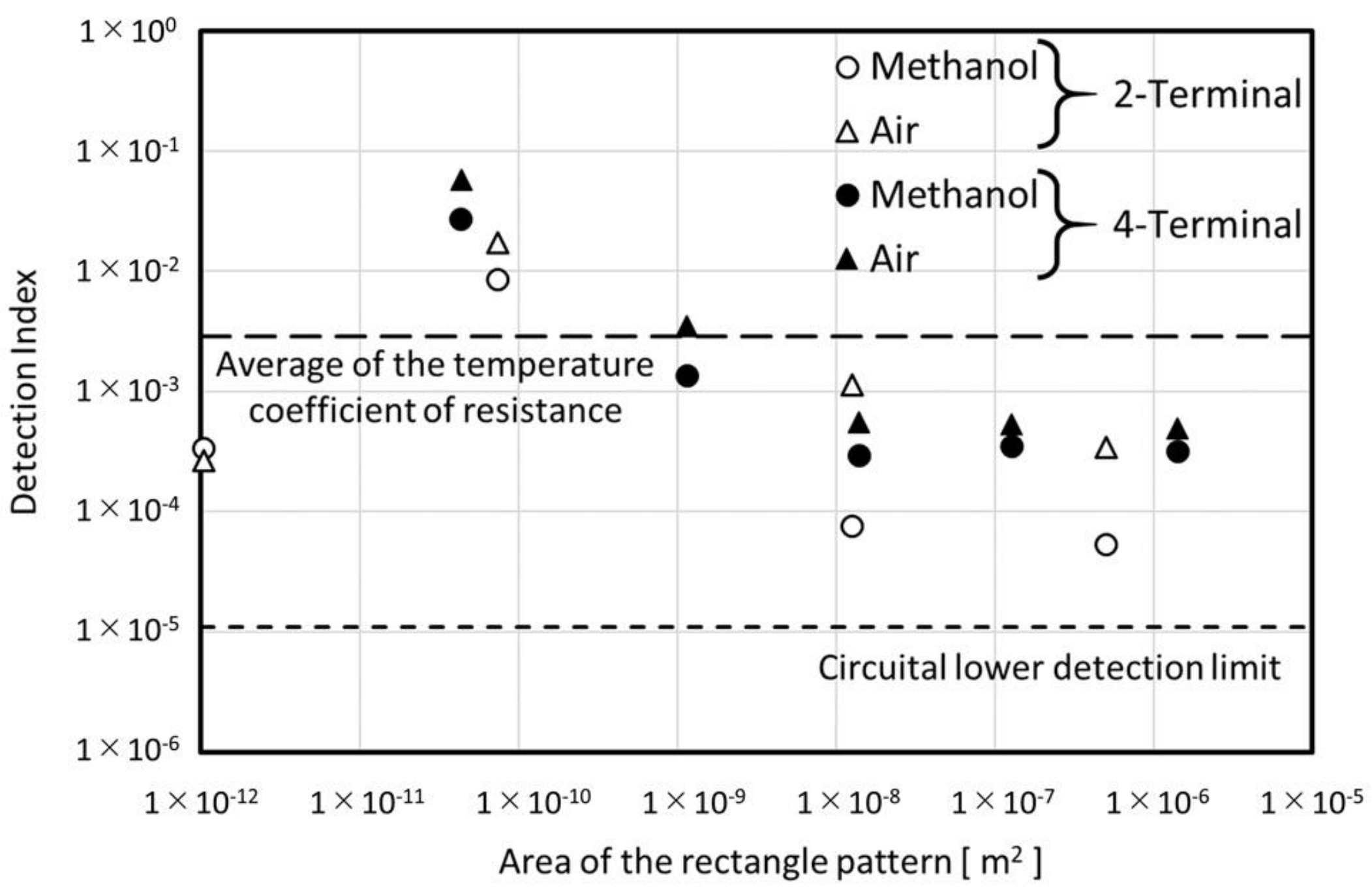
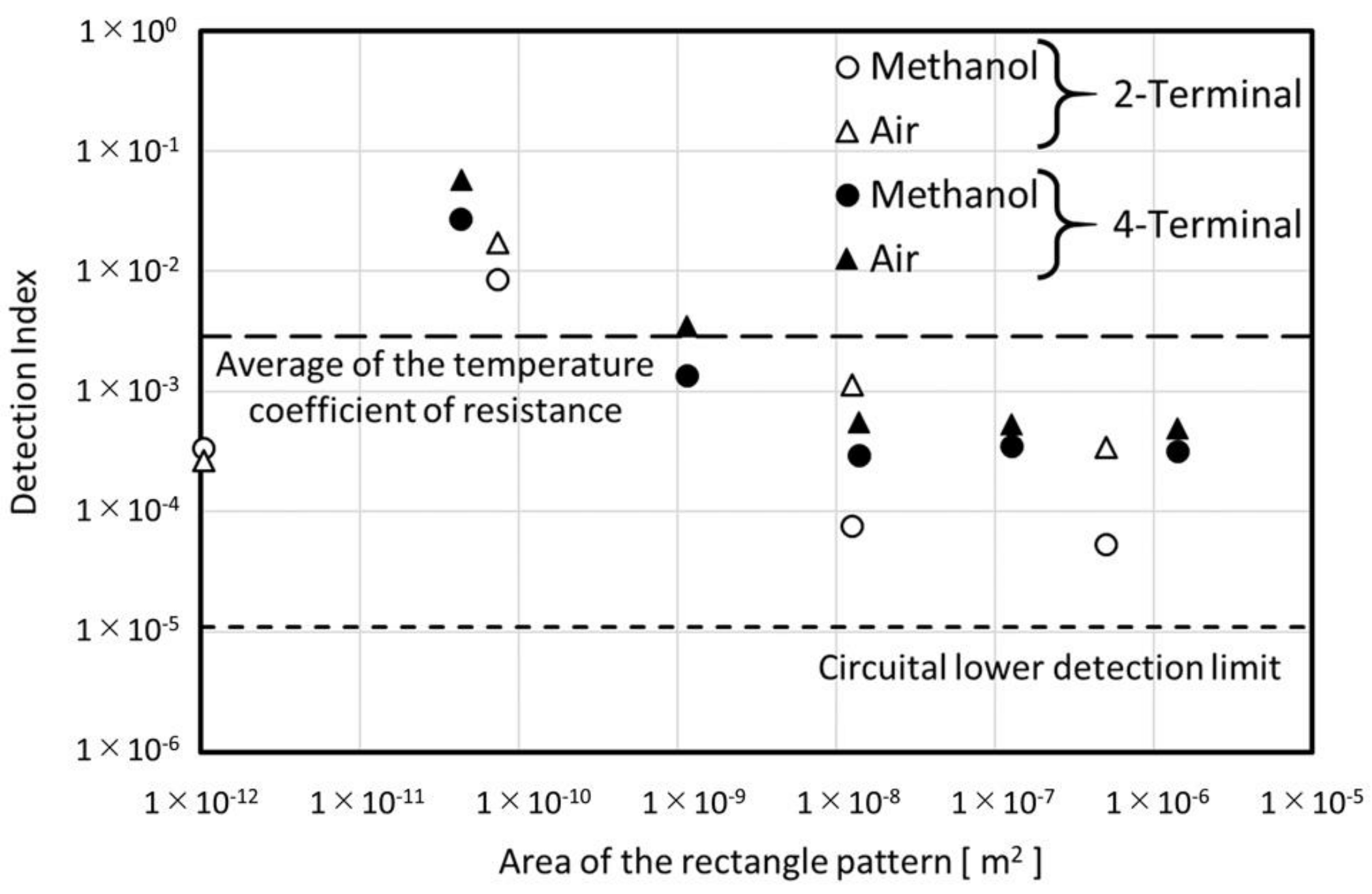
4.2.3. Detection of the Thermal Property Difference
4.2.4. Discussion on the Existence of Thermal Contact Resistance
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ritossa, F. A new puffing pattern induced by temperature shock and DNP in Drosophila. Experientia 1962, 18, 571–573. [Google Scholar] [CrossRef]
- Tissieres, A.; Mitchell, H.K.; Tracy, U.M. Protein synthesis in salivary glands of Drosophila melanogaster: Relation to chromosome puffs. J. Mol. Biol. 1974, 84, 389–398. [Google Scholar] [CrossRef]
- Hartl, F.U.; Bracher, A.; Hayer-Hartl, M. Molecular chaperones in protein folding and proteostasis. Nature 2011, 475, 324–332. [Google Scholar] [CrossRef] [PubMed]
- Magrane, J.; Smith, R.C.; Walsh, K.; Querfurth, H.W. Heat shock protein 70 participates in the neuroprotective response to intracellularly expressed β-Amyloid in neurons. J. Neurosci. 2004, 24, 1700–1706. [Google Scholar] [CrossRef] [PubMed]
- Caterina, M.J.; Schumacher, M.A.; Tominaga, M.; Rosen, T.A.; Levine, J.D.; Julius, D. The capsaicin receptor: A heat-activated ion channel in the pain pathway. Nature 1997, 389, 816–824. [Google Scholar] [CrossRef] [PubMed]
- Tominaga, M.; Caterina, M.J. Thermosensation and pain. J. Neurobiol. 2004, 61, 3–12. [Google Scholar] [CrossRef] [PubMed]
- Takayama, Y.; Furue, H.; Tominaga, M. 4-isopropylcyclohexanol has potential analgesic effects through the inhibition of anoctamin 1, TRPV1 and TRPA1 channel activities. Sci. Rep. 2017, 7, 43132. [Google Scholar] [CrossRef] [PubMed]
- McLaughlin, E. Thermal Conductivity 2; Tye, R.P., Ed.; Academic Press Inc.: London, UK, 1969; pp. 1–64. ISBN 978-0127054025. [Google Scholar]
- Assael, M.J.; Antoniadis, K.D.; Wakeham, W.A. Historical Evolution of the Transient Hot-Wire Technique. Int. J. Thermophys. 2010, 31, 1051–1072. [Google Scholar] [CrossRef]
- Wang, H.; Sen, M. Analysis of the 3-omega method for thermal conductivity measurement. Int. J. Heat Mass Tran. 2009, 52, 2102–2109. [Google Scholar] [CrossRef]
- Moskal, D.; Martan, J.; Lang, V.; Švantner, M.; Skála, J.; Tesař, J. Theory and verification of a method for parameter-free laser-flash diffusivity measurement of a single-side object. Int. J. Heat Mass Tran. 2016, 102, 574–584. [Google Scholar] [CrossRef]
- Beigelbeck, R.; Nachtnebel, H.; Kohl, F.; Jakoby, B. A novel measurement method for the thermal properties of liquids by utilizing a bridge-based micromachined sensor. Meas. Sci. Technol. 2011, 22, 105407. [Google Scholar] [CrossRef]
- Mahdavifar, A.; Navaei, M.; Hesketh, P.J.; Findlay, M.; Stetter, J.R.; Hunter, G.W. Transient thermal response of micro-thermal conductivity detector (TCD) for the identification of gas mixtures: An ultra-fast and low power method. Microsyst. Nanoeng. 2015, 1, 15025. [Google Scholar] [CrossRef]
- Struk, D.; Shirke, A.; Mahdavifar, A.; Hesketh, P.J.; Stetter, J.R. Investigating time-resolved response of micro thermal conductivity sensor under various modes of operation. Sens. Actuators B Chem. 2018, 254, 771–777. [Google Scholar] [CrossRef]
- Van der held, E.F.M.; Van Drunen, F.G. A method of measuring the thermal conductivity of liquids. Physica 1949, 15, 865–881. [Google Scholar] [CrossRef]
- Sommerfeld, A. Zur analytischen Theorie der Wärmeleitung. Math. Ann. 1894, 45, 263–277. [Google Scholar] [CrossRef]
- Bellman, R.; Marshak, R.E.; Wing, G.M. Laplace transform solution of two-medium neutron ageing problem. Philos. Mag. 1949, 40, 297–308. [Google Scholar] [CrossRef]
- Gustafsson, S.E.; Karawacki, E. Transient hot-strip probe for measuring thermal-properties of insulating solids and liquids. Rev. Sci. Instrum. 1983, 54, 744–747. [Google Scholar] [CrossRef]
- Birge, N.O. Specific-heat spectroscopy of glycerol and propylene-glycol near the glass-transition. Phys. Rev. B 1986, 34, 1631–1642. [Google Scholar] [CrossRef]
- Takegoshi, E.; Imura, S.; Hirasawa, Y.; Takenaka, T. A method of measuring the thermal-conductivity of solid materials by transient hot-wire method of comparison. Bull. JSME 1982, 25, 395–402. [Google Scholar] [CrossRef]
- Shendeleva, M.L. Reflection and refraction of a transient temperature field at a plane interface using Cagniard-de Hoop approach. Phys. Rev. E 2001, 64, 036612. [Google Scholar] [CrossRef] [PubMed]
- Shendeleva, M.L. Instantaneous line heat source near a plane interface. J. Appl. Phys. 2004, 95, 2839–2845. [Google Scholar] [CrossRef]
- Katayama, T.; Morishima, K. Time evolution of the heat diffusion phenomenon from the point source near the interface. Int. J. Therm. Sci. under review.
- Gustafsson, S.E. A non-steady-state method of measuring thermal conductivity of transparent liquids. Zeitschrift für Naturforschung 1967, 22, 1005–1011. [Google Scholar] [CrossRef]
- Gustafsson, S.E.; Karawacki, E.; Khan, M.N. Transient hot-strip method for simultaneously measuring thermal-conductivity and thermal-diffusivity of solids and fluids. J. Phys. D Appl. Phys. 1979, 12, 1411–1421. [Google Scholar] [CrossRef]
- Carslaw, H.S.; Jaeger, J.C. Conduction of Heat in Solids, 2nd ed.; Oxford University Press: Oxford, UK, 1959; pp. 256–259. ISBN 978-0198533689. [Google Scholar]
- National Astronomical Observatory (Ed.) Chronological Scientific Tables, 81st ed.; Maruzen Co., Ltd.: Tokyo, Japan, 2007; p. 408. ISBN 978-4621079027. (In Japanese) [Google Scholar]
- Cahill, D.G.; Pohl, R.O. Thermal-conductivity of amorphous solids above the plateau. Phys. Rev. B 1987, 35, 4067–4073. [Google Scholar] [CrossRef]
- Gustafsson, S.E.; Chohan, M.A.; Ahmed, K.; Maqsood, A. Thermal properties of thin insulating layers using pulse transient hot strip measurements. J. Appl. Phys. 1984, 55, 3348–3353. [Google Scholar] [CrossRef]
- International Organization for Standardization. ISO 5725-1:1994(en) Accuracy (Trueness and Precision) of Measurement Methods and Results—Part 1: General Principles and Definitions. Available online: https://www.iso.org/obp/ui/#iso:std:iso:5725:-1:ed-1:v1:en (accessed on 23 February 2018).
- Dinh, T.; Phan, H.P.; Qamar, A.; Woodfield, P.; Nguyen, N.T.; Dao, D.V. Thermoresistive effect for advanced thermal sensors: Fundamentals, design considerations, and applications. J. Microelectromech. Syst. 2017, 26, 966–986. [Google Scholar] [CrossRef]
- Belser, R.B.; Hicklin, W.H. Temperature coefficients of resistance of metallic films in the temperature range 25° to 600 °C. J. Appl. Phys. 1959, 30, 313–322. [Google Scholar] [CrossRef]
- Ghosh, C.K.; Pal, A.K. Electrical resistivity and galvanomagnetic properties of evaporated nickel films. J. Appl. Phys. 1980, 51, 2281–2285. [Google Scholar] [CrossRef]
- Starý, V.; Šefčik, K. Electrical resistivity and structure of thin nickel films-effect of annealing. Vacuum 1981, 31, 345–349. [Google Scholar] [CrossRef]
- Angadi, M.A.; Udachan, L.A. Electrical properties of thin nickel films. Thin Solid Films 1981, 79, 149–153. [Google Scholar] [CrossRef]
- Asahi Glass Architectural Glass General Catalog. 2016, pp. 2–3-1. Available online: https://www.asahiglassplaza.net/catalogue/sougou_gijutsu/0004a.pdf (accessed on 4 April 2018). (In Japanese).
- Nippon Sheet Glass Architectural Glass General Catalog—Technical Reference. 2015, p. 13. Available online: http://glass-catalog.jp/pdf/g32-010.pdf (accessed on 4 April 2018). (In Japanese).
- The Japan Society of Mechanical Engineers (Ed.) JSME Data Book: Heat Transfer, 5th ed.; Maruzen Co., Ltd.: Tokyo, Japan, 2009; pp. 282–296. ISBN 978-4888981842. (In Japanese) [Google Scholar]
- Chien, H.C.; Yao, D.J.; Hsu, C.T. Measurement and evaluation of the interfacial thermal resistance between a metal and a dielectric. Appl. Phys. Lett. 2008, 93, 231910. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor ID Number | Film Deposition Batch Number | Thickness of the Ni Thin Film | Pattern Information | Estimated Results | ||||
|---|---|---|---|---|---|---|---|---|
| Terminal Type | Rectangle Pattern | Electrical Resistance | Electrical Resistivity | Temperature Coefficient of Resistance | ||||
| Width | Length | |||||||
| Design (Measured) | Design | |||||||
| nm | µm | ppm/K | ||||||
| #1 | 1 | 75 | 2 | 10 (9.1) | 1400 | 277.8 | 1.44 × 10−7 | 2910 |
| #2 | 2 | 25 | 1 (0.5) | 2 | 48.9 | 3.2 × 10−7 | 2790 | |
| #3 | 3 | 75 | 2 (1.5) | 50 | 78.2 | 1.7 × 10−7 | 2840 | |
| #4 | 4 | 100 (100.1) | 5000 | 93.3 | 1.4 × 10−7 | 2830 | ||
| #5 | 5 | 25 | 4 | 9 (8.0) | 143 | 79.9 | 1.1 × 10−7 | 2880 |
| #6 | 30 (29.4) | 475 | 67.0 | 1.0 × 10−7 | 3020 | |||
| #7 | 90 (89.2) | 1425 | 75.8 | 1.2 × 10−7 | 2930 | |||
| #8 | 300 (298.9) | 4750 | 73.7 | 1.2 × 10−7 | 2870 | |||
| #9 | 6 | 2 (1.4) | 31 | 123.6 | 1.4 × 10−7 | 3100 | ||
| Properties | Density | Constant Pressure Specific Heat Capacity | Thermal Conductivity | Thermal Diffusivity 2 | |
|---|---|---|---|---|---|
| Material | kg/m2 | kJ/(kg × K) | W/(m × K) | m2/s | |
| Water 1 | 996 | 4.18 | 0.611 | 1.47× 10−7 | |
| Methanol 1 | 784 | 2.54 | 0.202 | 1.01 × 10−7 | |
| Air 1 | 1.16 | 1.01 | 0.0262 | 2.25 × 10−5 | |
| Nickel 1 | 8900 | 0.45 | 90 | 2.3 × 10−5 | |
| Soda-lime glass [36,37] | 2500 | 0.8 | 1.0 | 5.0 × 10−7 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Katayama, T.; Uesugi, K.; Morishima, K. Analytical Model and Experimental Evaluation of the Micro-Scale Thermal Property Sensor for Single-Sided Measurement. Micromachines 2018, 9, 168. https://doi.org/10.3390/mi9040168
Katayama T, Uesugi K, Morishima K. Analytical Model and Experimental Evaluation of the Micro-Scale Thermal Property Sensor for Single-Sided Measurement. Micromachines. 2018; 9(4):168. https://doi.org/10.3390/mi9040168
Chicago/Turabian StyleKatayama, Takashi, Kaoru Uesugi, and Keisuke Morishima. 2018. "Analytical Model and Experimental Evaluation of the Micro-Scale Thermal Property Sensor for Single-Sided Measurement" Micromachines 9, no. 4: 168. https://doi.org/10.3390/mi9040168
APA StyleKatayama, T., Uesugi, K., & Morishima, K. (2018). Analytical Model and Experimental Evaluation of the Micro-Scale Thermal Property Sensor for Single-Sided Measurement. Micromachines, 9(4), 168. https://doi.org/10.3390/mi9040168