
Reliable and Accurate Release of Micro-Sized Objects with a Gripper that Uses the Capillary-Force Method

Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
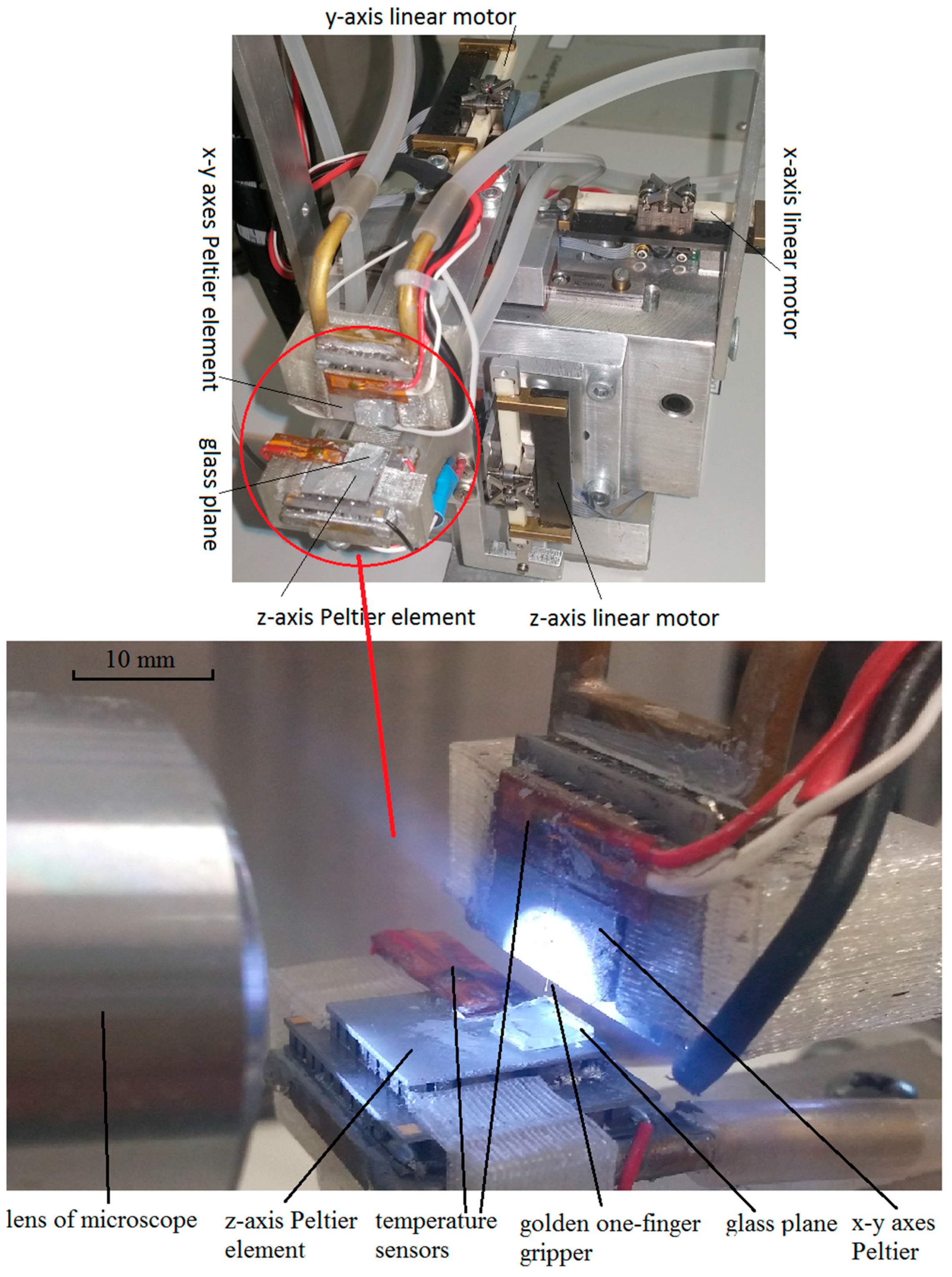
2.2. Laboratory Set-Up
2.3. Gripping/Releasing Method
- -
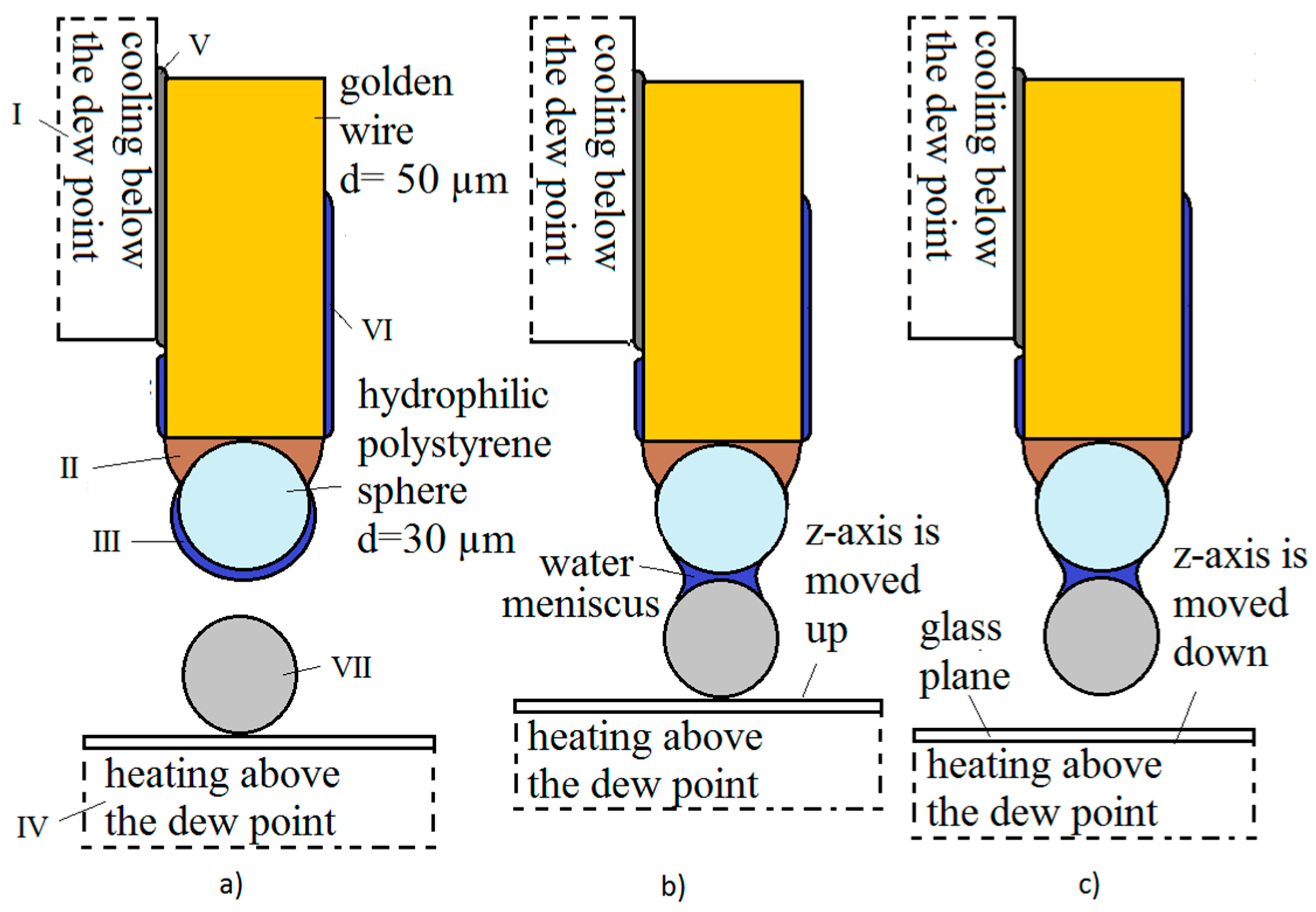
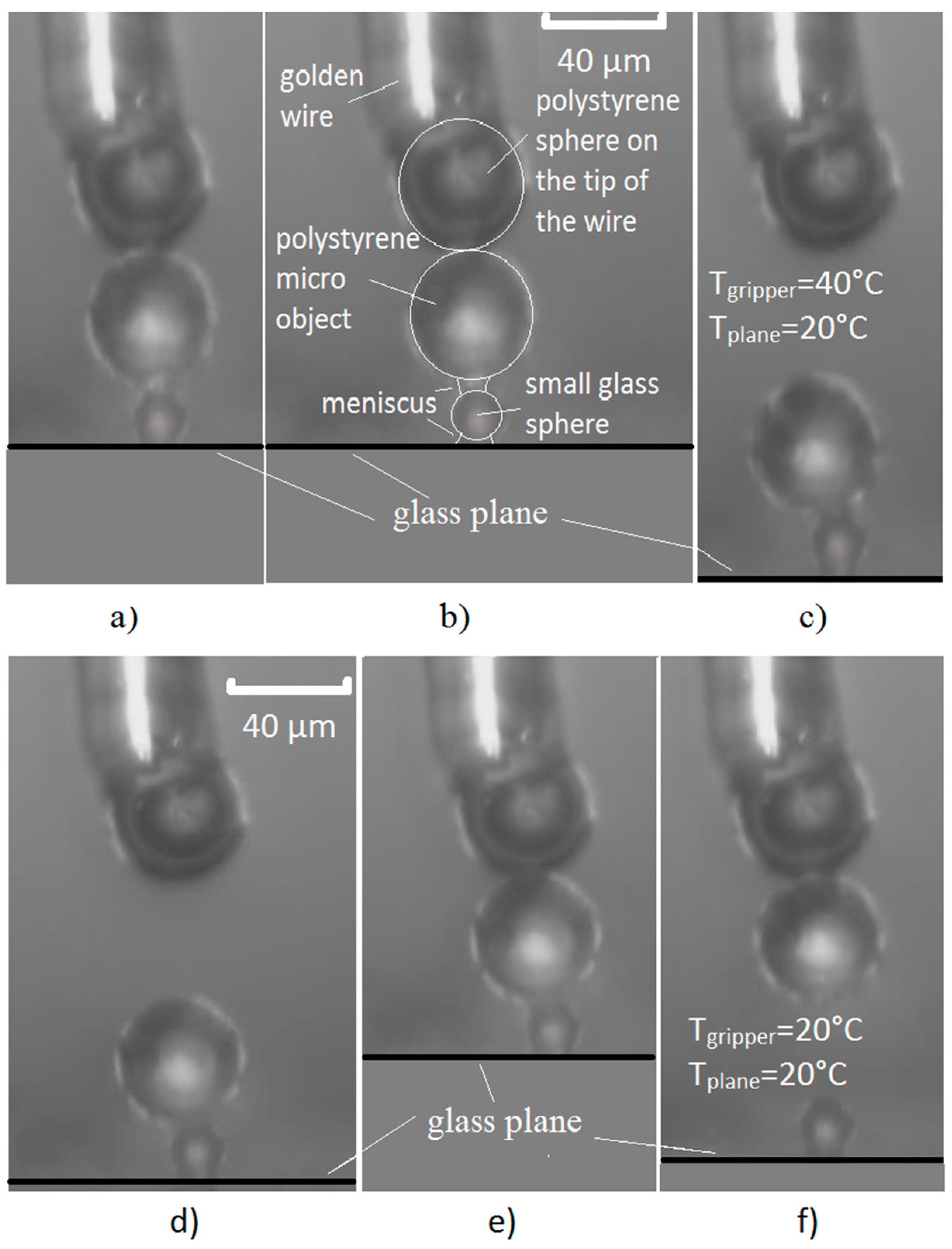
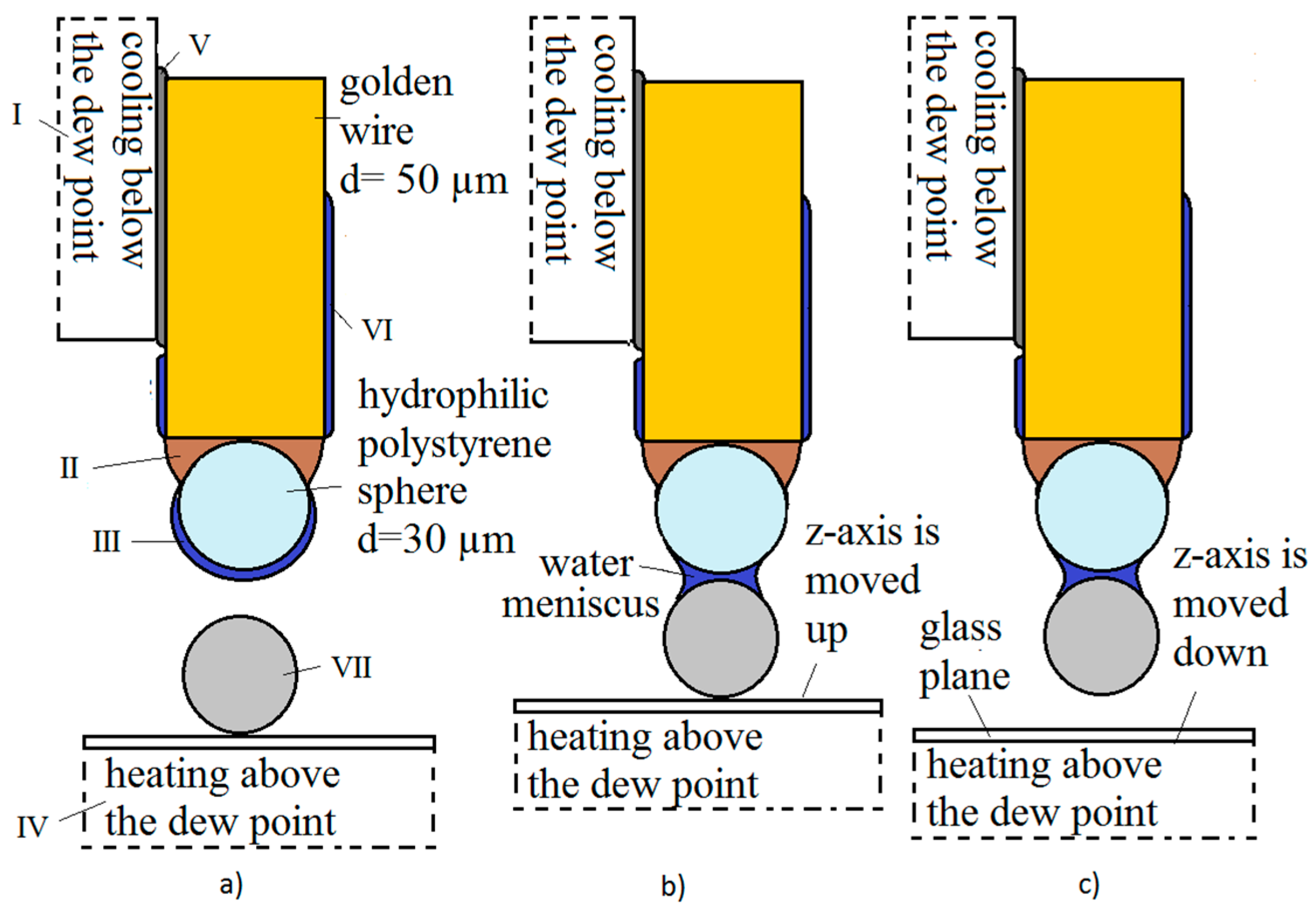
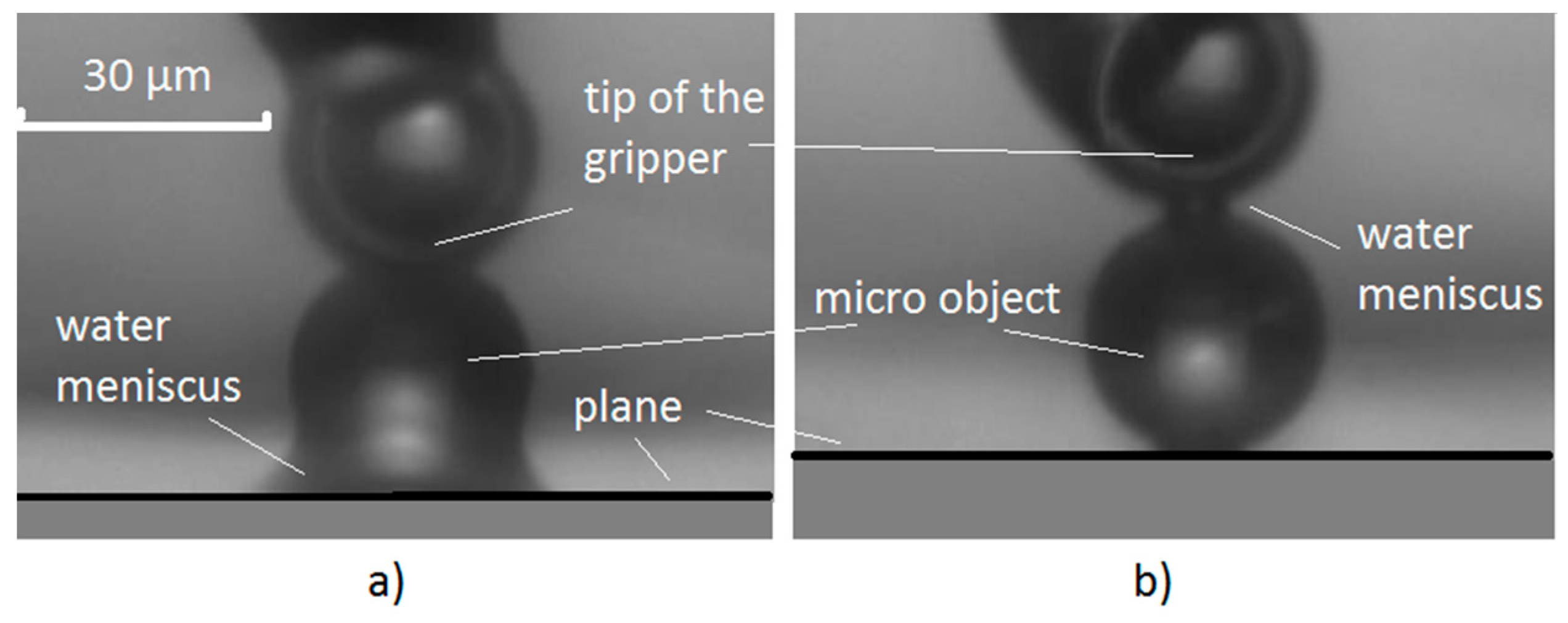
- The temperature of the x-y Peltier element was lowered below the dew point. This created a thin layer of condensed water on the gripper’s tip (polystyrene sphere) in 2–3 s (Figure 2a).
- -
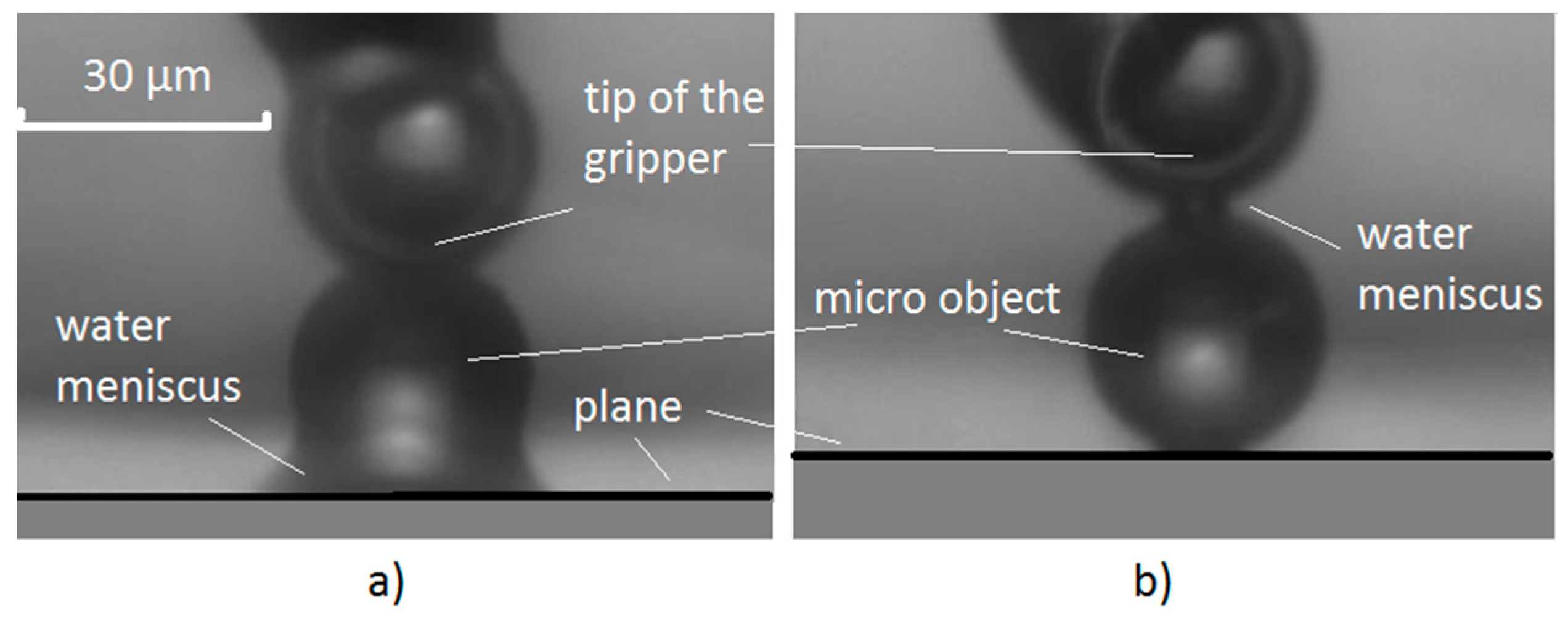
- The tip, with the thin layer of water, was moved so close to the micro-object that it slightly touched it. Immediately, a water meniscus was created between the tip and the object (Figure 2b and Figure 4b). This created a capillary force between the object and the tip. The object was then warmed through the glass plane, to a temperature that was a bit above the dew-point by the z-axis Peltier element (the water accumulated in the meniscus completely evaporated), so that only the van der Waals force existed between the object and the glass plane (plate).
- -
- -
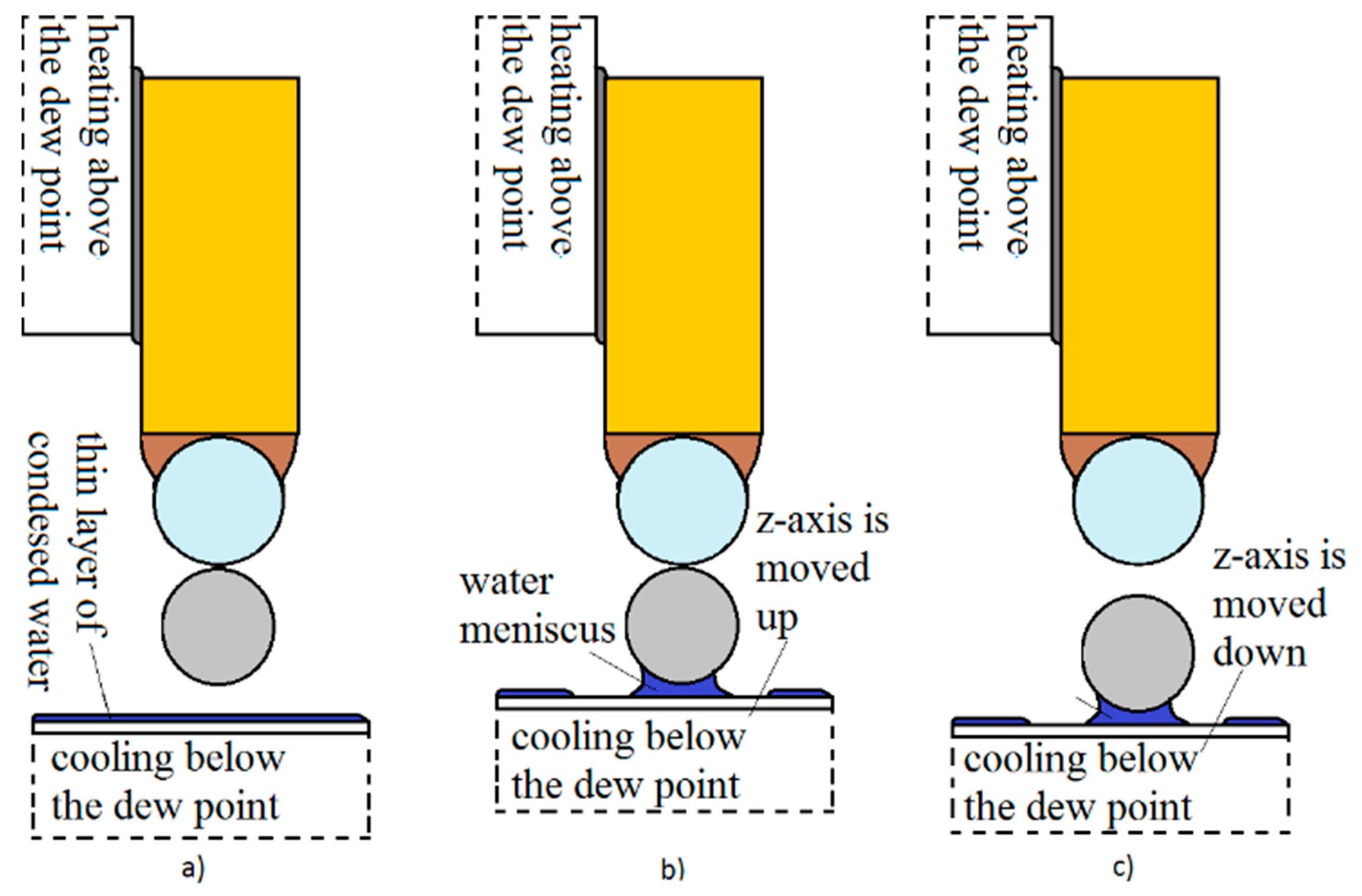
- The temperature of the x-y Peltier element was increased so that the temperature of the tip of the gripper was above the dew point. The water from the meniscus evaporated in 2–3 s (Figure 3a). Consequently, only the van der Waals force remained between the gripper’s tip and the micro-object.
- -
- The temperature of the z-axis Peltier element was decreased at the same time. The glass plane reached slightly below the dew point temperature in 2–3 s and a thin layer of condensed water from the surrounding air was created, at a pressure of 1 bar. The z-axis, along with the glass plane and the thin layer of water, was moved up toward the gripped micro-object, so that it slightly touched it. Immediately, a water meniscus between the object and the glass plane was created (Figure 3b and Figure 4a).
- -
- The z-axis was moved down and the object was released from the tip (Figure 3c). This was caused by the capillary force between the glass plane and the object, the force being greater than the van der Waals force between the gripper’s tip and the object.
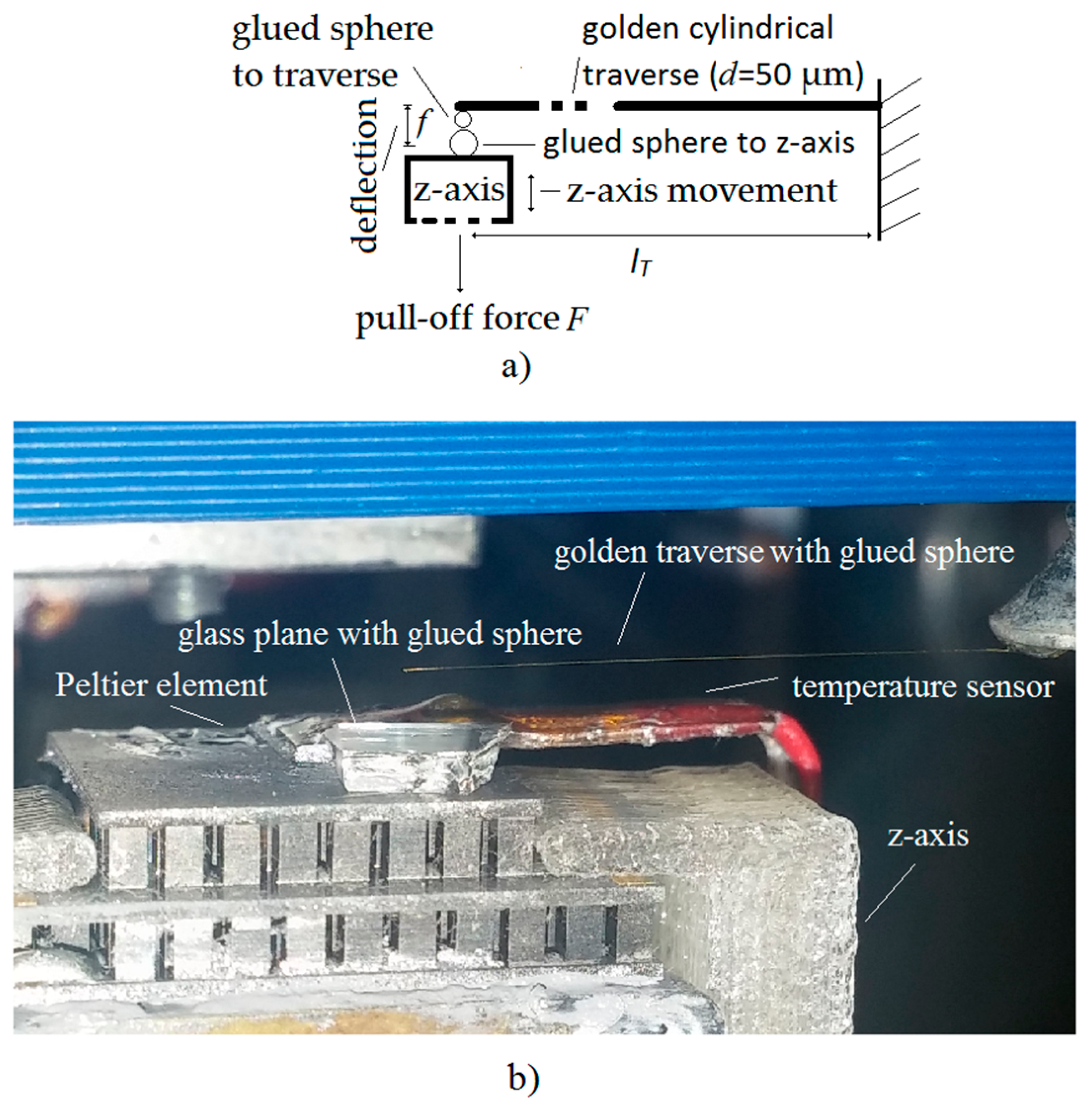
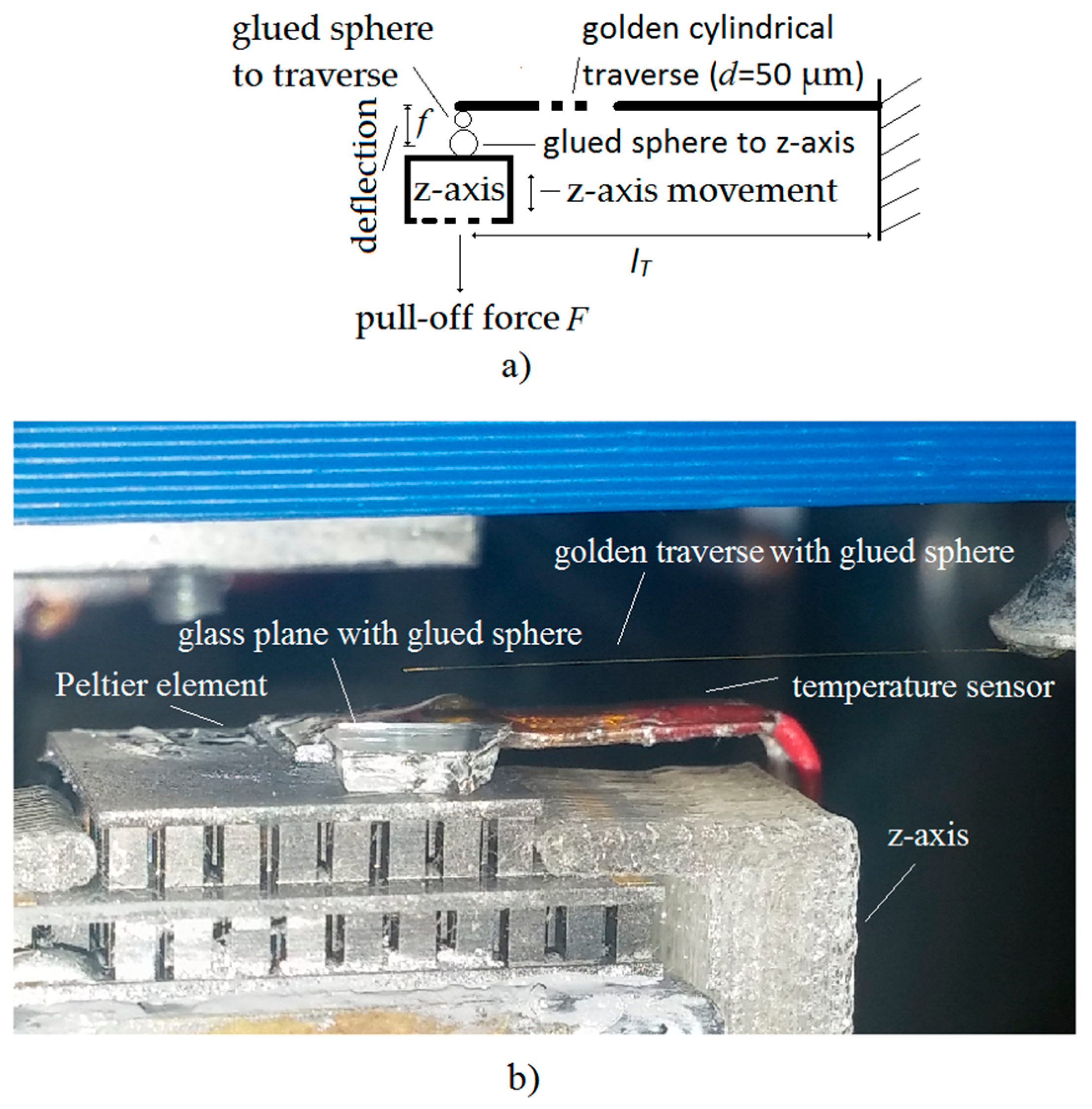
2.4. Pull-Off Force Measurement Method
3. Results
3.1. Lab Experiments for Releasing/Gripping a Sphere and Placing It on Top of Another Sphere
- -
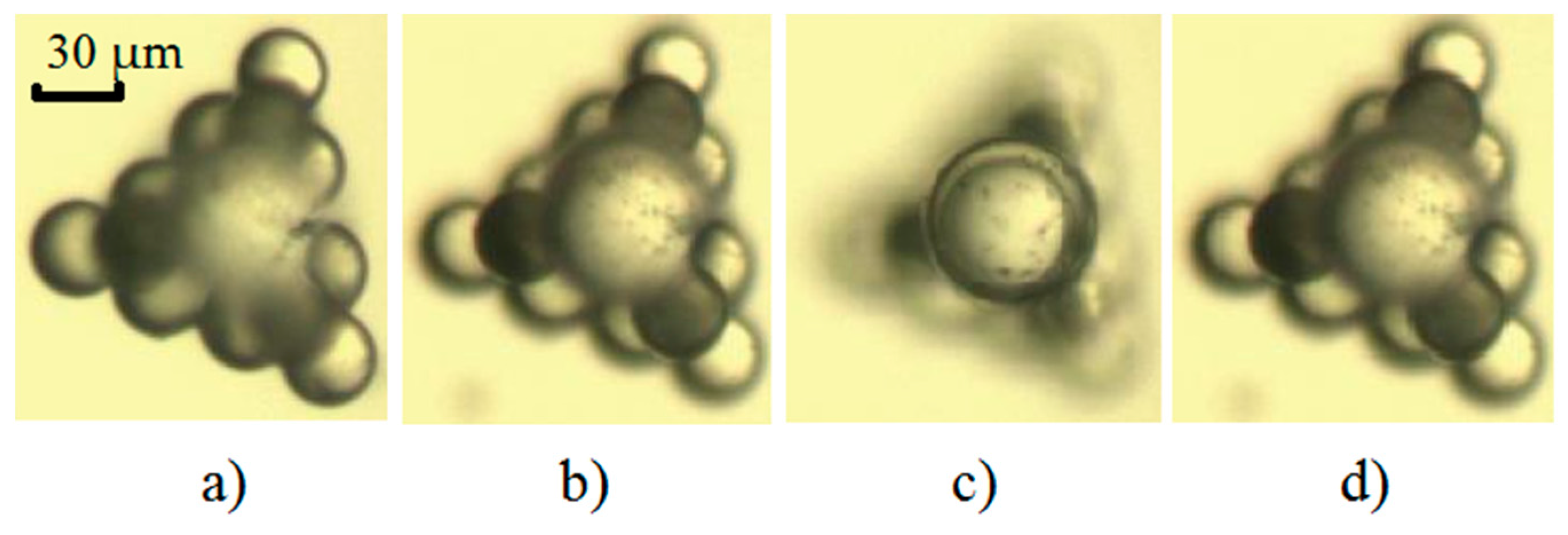
- Releasing: Two meniscuses have to be created: one between the glass plane and the bottom sphere, and one between both spheres when releasing a micro-object on top of another one. This is done by cooling the glass plane over a longer period of time (approximately 5–6 s). The tip of the finger has to be heated enough to maintain the evaporation of condensed water between the tip of the finger and the micro-object on the upper side of the released micro-object.
- -
- Gripping: Two meniscuses have to be created: one between the glass plane and the bottom micro-object, and one between the upper micro-object and the tip of the gripper. The contact area between both objects has to be free of water when gripping. This is achieved by heating both Peltier elements above the dew point. This is done to ensure that the condensed water on the finger’s tip, on both micro-objects, and on the glass plane evaporates. Evaporation occurs in 3–4 s. Therefore, the capillary force is eliminated between all the parts. Then the temperature is decreased below the dew point on both Peltier elements. First, water is condensed on the tip and on the glass plane. Then, a water meniscus forms between the finger’s tip and the upper micro-object. At the same time, a water meniscus forms between the glass plane and the lower micro-object. This occurs when enough water is condensed on both the finger’s tip and the glass plane (the glass plane or objects or golden rod are seen blurred through the microscope because of the dew). This takes 2–3 s. After this time, a water meniscus between both micro-objects cannot form for 5–6 s. This is the time-window when only the upper micro-object is gripped, and can be reliably detached from the lower micro-object.
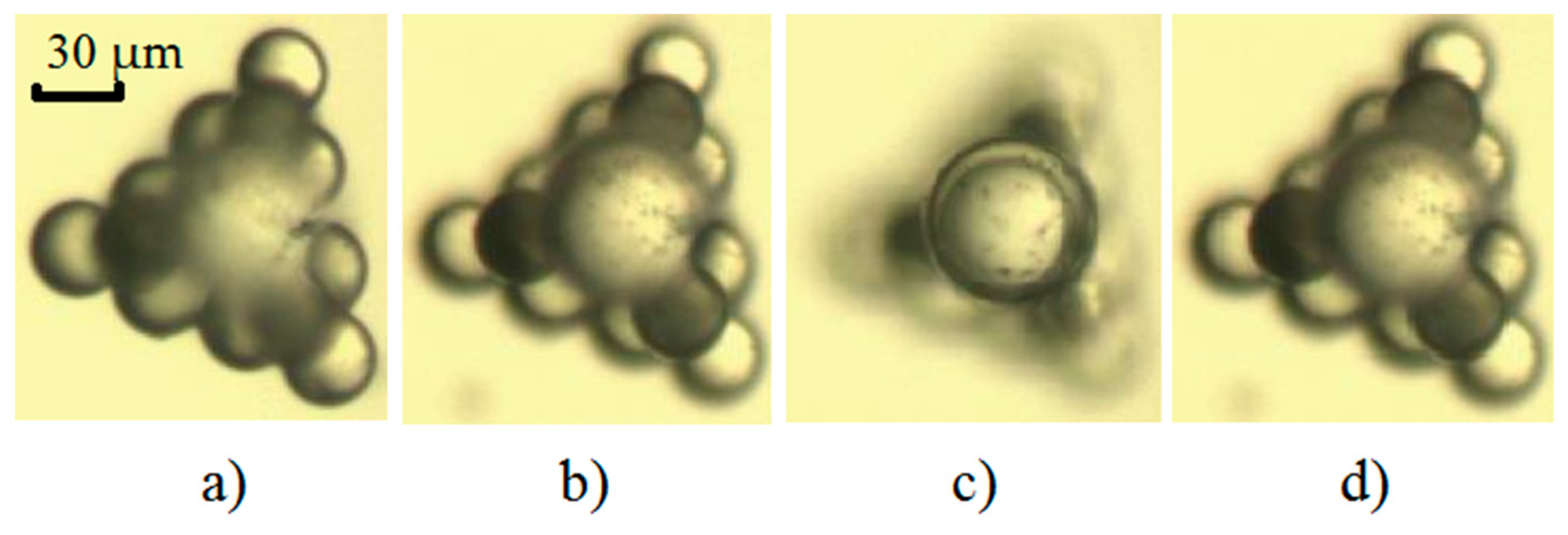
3.2. A 3D Construction Made up of Micro-Sized Spheres
4. Discussion
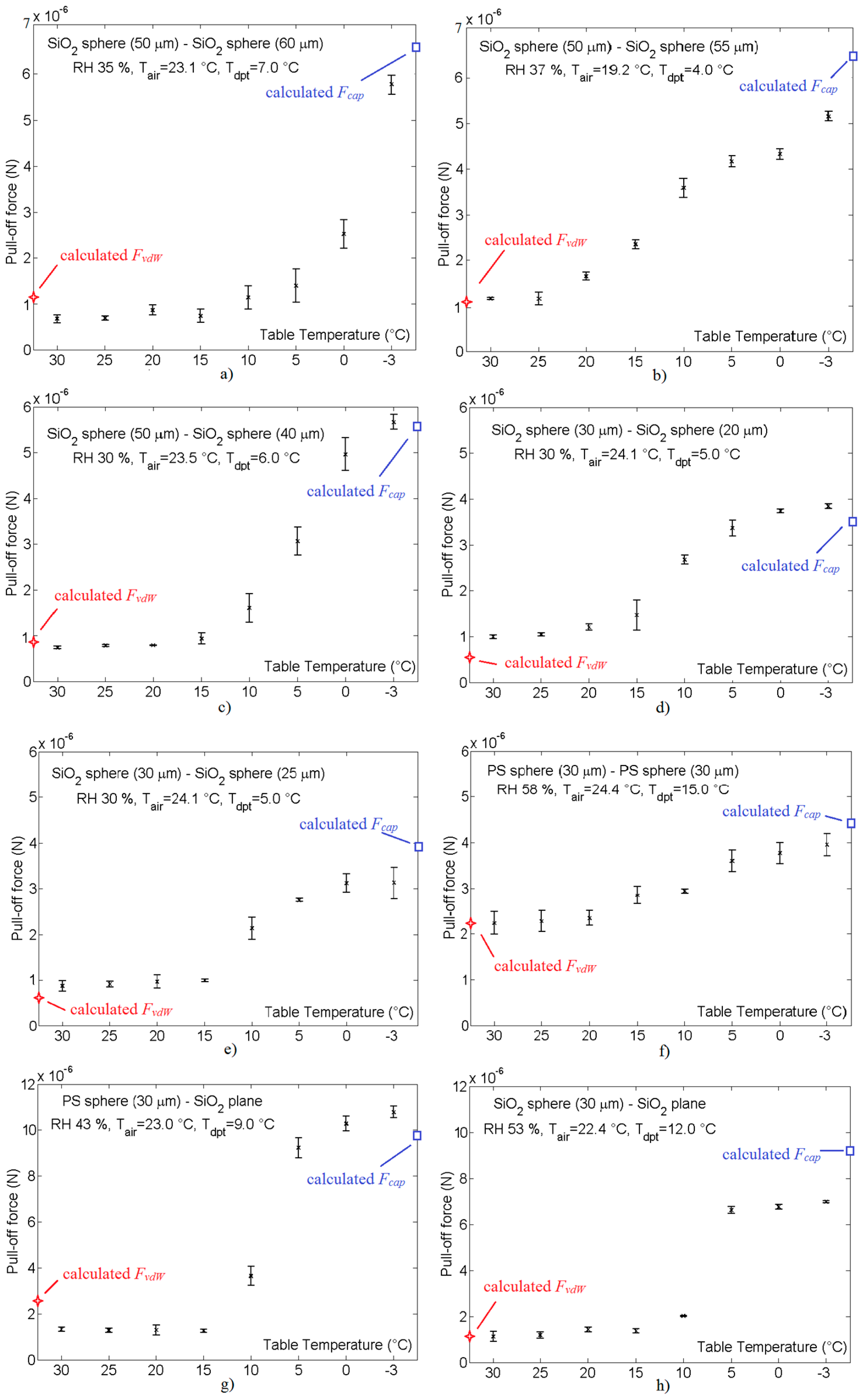
4.1. The Influence of the Dew Point on the Measurement of the Pull-Off Force
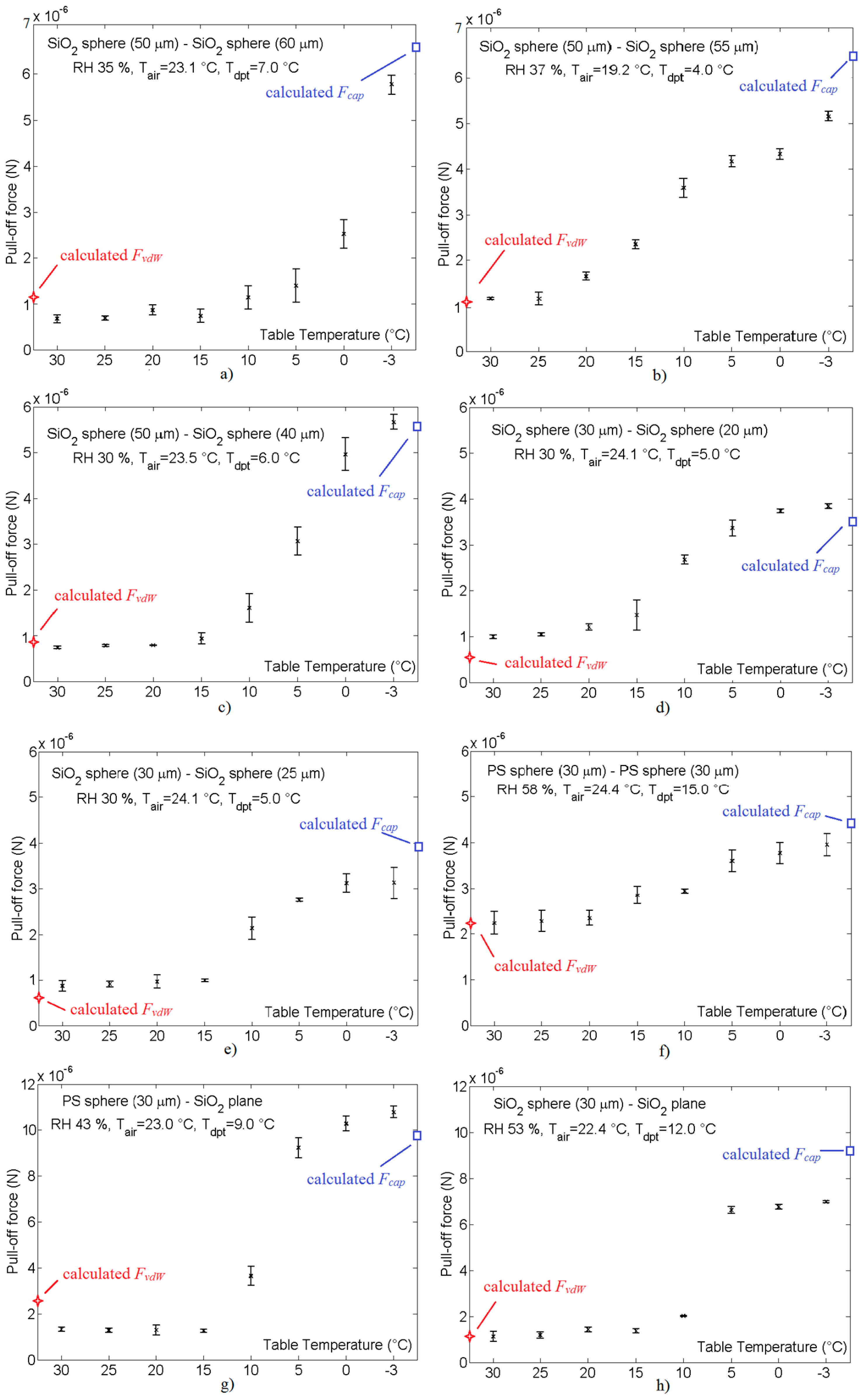
4.2. Comparison of the Measured Pull-Off Force with the Calculated van der Waals and Capillary Forces
4.3. Reliability of the Releasing Procedure
4.4. Accuracy of the Releasing Procedure
4.5. Influence of the Water Layer Thickness
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lambert, P. Capillary Forces in Microassembly Modeling, Simulation, Experiments, and Case Study; Springer Science + Business Media, LLC: New York, NY, USA, 2007. [Google Scholar] [CrossRef]
- Biganzoli, F.; Fassi, I.; Pagano, C. Development of a Gripping System Based on Capillary Force. In Proceedings of the 6th IEEE International Symposium on Assembly and Task Planning, Montreal, QC, Canada, 19–21 July 2005. [Google Scholar] [CrossRef]
- Zesch, W.; Brunner, M.; Weber, A. Vacuum tool for handling microobjects with a nanorobot. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; pp. 1761–1766. [Google Scholar]
- Ruggeri, S.; Fontana, G.; Pagano, C.; Fassi, I.; Legnani, G. Handling and Manipulation of Microcomponents: Work-Cell Design and Preliminary Experiments. In 6th International Precision Assembly Seminar (IPAS); IFIP Advances in Information and Communication Technology, AICT-371; Ratchev, S., Ed.; Springer: Chamonix, France, 2012; pp. 65–72. Available online: https://hal.inria.fr/hal-01363884/document (accessed on 14 April 2017).
- Pagano, C.; Fassi, I. Devices and techniques for contact microgripping. In Advanced Mechatronics and MEMS Devices; Zhang, D., Ed.; Springer: New York, NY, USA, 2012; Volume 23, pp. 165–178. [Google Scholar] [CrossRef]
- Lambert, P.; Seigneur, F.; Koelemeijer, S.; Jacot, J. A case study of surface tension gripping: The watch bearing. J. Micromech. Microeng. 2006, 16, 1267. [Google Scholar] [CrossRef]
- Apparatus and Method for Manipulating Micro Component. U.S. Patent US 8628648 B2. Available online: https://www.google.com/patents/US8628648 (accessed on 13 April 2017).
- Fantoni, G.; Hansen, H.N.; Santochi, M. A new capillary gripper for mini and micro parts. CIRP Ann. Manuf. Technol. 2013, 62, 17–20. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, J.; Zhou, Y.-X. A convective cooling enabled freeze tweezer for manipulating micro-scale objects. J. Micromech. Microeng. 2008, 18, 207–210. [Google Scholar] [CrossRef]
- Cecchi, R.; Verotti, M.; Capata, R.; Dochshanov, A.; Broggiato, G.B.; Crescenzi, R.; Balucani, M.; Natali, S.; Razzano, G.; Lucchese, F.; et al. Development of Micro-Grippers for Tissue and Cell Manipulation with Direct Morphological Comparison. Micromachines 2015, 6, 1710–1728. [Google Scholar] [CrossRef]
- Heriban, D.; Gauthier, M.; Regnier, S.; Chaillet, N.; Lutz, P. Automatic pick-and-place of 40 microns objects using a robotic platform. In Proceedings of the 9th International Conference of the European Society for Precision Engineering and Nanotechnology, EUSPEN’09, San Sebastian, Spain, 2–5 Jun 2009; pp. 515–518. [Google Scholar]
- Dejeu, J.; Bechelany, M.; Rougeot, P.; Philippe, L.V.; Gauthier, M. Adhesion Control for Micro-and Nano-Manipulation. ACS Nano 2011, 5, 4648–4657. [Google Scholar] [CrossRef] [PubMed]
- Šafarič, R.; Lukman, D. One-finger gripper based on the variable van der Waals force used for a single nano/micro-sized object. J. Micromech. Microeng. 2014, 24, 085012. [Google Scholar] [CrossRef]
- Fan, Z.; Rong, W.; Wang, L.; Sun, L. A single-probe capillary microgripper induced by dropwise condensation and inertial release. J. Micromech. Microeng. 2015, 25, 115011. [Google Scholar] [CrossRef]
- Fan, Z.; Wang, L.; Rong, W.; Sun, L. Dropwise condensation on a hydrophobic probe-tip for manipulating micro-objects. Appl. Phys. Lett. 2015, 106, 084105. [Google Scholar] [CrossRef]
- Manipulation of Objects with Fluid Droplets. U.S. Patent US 20060226013 A1, 12 October 2006. Available online: https://www.google.ch/patents/US20060226013 (accessed on 13 April 2017).
- Rong, W.; Fan, Z.; Wang, L.; Xie, H.; Sun, L. A vacuum microgripping tool with integrated vibration releasing capability. Rev. Sci. Instrum. 2014, 85, 085002. [Google Scholar] [CrossRef] [PubMed]
- Lukman, D.; Šafarič, R. Variable contact surface gripping technique for microsized objects. Micro Nano Lett. 2013, 8, 207–210. [Google Scholar] [CrossRef]
- Grier, D.G. A Revolution in Optical Manipulation. Nature 2003, 424, 810–816. [Google Scholar] [CrossRef] [PubMed]
- Škorc, G.; Šafarič, R. Adaptive Positioning of Mems Production System With Nano—Resolution. Intell. Autom. Soft Comput. 2012, 18, 381–398. [Google Scholar] [CrossRef]
- Saito, S.; Motokado, T.; Obata, K.J.; Takahashi, K. Capillary force with a concave probe-tip for micromanipulation. Appl. Phys. Lett. 2005, 87, 234103. [Google Scholar] [CrossRef]
- Bolton, D. The Computation of Equivalent Potential Temperature. Mon. Weather Rev. 1980, 108, 1046–1053. [Google Scholar] [CrossRef]
- Lambert, P.; Chau, A.; Delchambre, A.; Régnier, S. Comparison between two capillary forces models. Langmuir 2008, 24, 3157–3163. [Google Scholar] [CrossRef] [PubMed]
- Rabinovich, Y.I.; Esayanur, M.S.; Moudgil, B.M. Capillary Forces between Two Spheres with a Fixed Volume Liquid Bridge: Theory and Experiment. Langmuir 2005, 21, 10992–10997. [Google Scholar] [CrossRef] [PubMed]
- Neeson, M.J.; Dagastine, R.R.; Chanabe, D.Y.C.; Tabor, R.F. Evaporation of a capillary bridge between a particle and a surface. Soft Matter 2014, 10, 8489–8499. [Google Scholar] [CrossRef] [PubMed]
- Bratina, B.; Šafarič, J. Uporaba Nanoprecizne Robotske Celice za Meritev van der Waals-Ove Sile Med Mikro Objekti. In Proceedings of the ERK’2016, Portorož, Slovenia, 19–21 September 2016; Available online: http://erk.fe.uni-lj.si/2016/papers/bratina(uporaba)p.pdf (accessed on 13 April 2017).
- Uran, S.; Šafarič, R.; Šafarič, J.; Bratina, B. Measurement of micro-object van der Waals peak distances in the presence of nano-roughness. Colloids Surf. A 2017. submitted for publication. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object Manipulation Characteristics | |||||
|---|---|---|---|---|---|
| Size of Object | Gripper Type | Approach | Dominant Gripping Force | Dominant Releasing Force | Ref. |
| Sub millimetre | 2 + F | Not reviewed | - | - | - |
| 1F | Vacuum tool | Pneumatic/sucking | Gravity or pneumatic/blowing | [3,4] | |
| Variable curvature micro-gripper | Capillary/liquid drop | Gravity with shape based reduction of capillary force | [2,5] | ||
| Capillary force gripping | Capillary/liquid drop | Gravity with cut-off of liquid meniscus | [1,6] | ||
| Method for manipulating micro component | Capillary/electro wetting | Gravity with electro wetting reduction of capillary force | [7] | ||
| Capillary hydrophobic/hydrophilic gripper | Capillary hydrophobic/hydrophilic gripper | Gravity with shape based reduction of capillary force | [8] | ||
| T | Freeze tweezers | Ice, mechanical coupling | Gravity | [9] | |
| Micro | 2 + F | CSFH silicon MEMS | Friction or mechanical coupling | Not known | [10] |
| Nanostructured and non-adhesive surface | Friction or mechanical coupling | Van der Waals | [11,12] | ||
| 1F | Variable Van der Waals force | Van der Waals | Van der Waals | [13] | |
| Vacuum tool | Pneumatic/sucking | Van der Waals | [3] | ||
| Single-probe capillary | Capillary/dropwise condensation | Inertial/vibrations | [14,15] | ||
| Fluid droplet based | Capillary/electro wetting | Capillary/electro wetting | [16] | ||
| Vacuum micro-gripping tool | Pneumatic | Inertial/vibrations | [17] | ||
| T | Variable contact surface (cryogenic) | Ice, mechanical coupling | Van der Waals | [18] | |
| Optical tweezers | laser beam | - | [19] | ||
| Objects | Material | θ1, θ2 [°] | a [µm] | R1 [µm] | R2 [µm] | V [pl] | Fcap [µN] | F(−3°C) [µN] | Dev. [%] |
|---|---|---|---|---|---|---|---|---|---|
| sp.-sp. | SiO2-SiO2 | 30, 30 | 1 | 25 | 30 | 0.235 | 6.6 | 5.8 | −12 |
| sp.-sp. | SiO2-SiO2 | 30, 30 | 1 | 25 | 20 | 0.235 | 5.7 | 5.6 | −2 |
| sp.-sp. | SiO2-SiO2 | 30, 30 | 1 | 25 | 27.5 | 0.235 | 6.4 | 5.1 | −20 |
| sp.-sp. | PS-PS | 20, 20 | 1 | 15 | 15 | 0.200 | 4.4 | 4.0 | −9 |
| sp.-pl. | PS-SiO2 | 20, 30 | 0.5 | 15 | - | 0.200 | 9.6 | 10.7 | +11 |
| sp.-sp. | SiO2-SiO2 | 30, 30 | 1 | 15 | 10 | 0.235 | 3.5 | 3.1 | −11 |
| sp.-sp. | SiO2-SiO2 | 30, 30 | 1 | 15 | 12.5 | 0.235 | 3.9 | 3.8 | −2 |
| sp.-pl. | SiO2-SiO2 | 30, 30 | 0.5 | 15 | - | 0.200 | 9.2 | 7.0 | −23 |
| Objects | Material | A [zJ] | l [nm] | R1 [µm] | R2 [µm] | FvdW [µN] | F(30 °C) [µN] | Dev. [%] |
|---|---|---|---|---|---|---|---|---|
| sp.-sp. | SiO2-SiO2 | 66 | 0.375 | 25 | 30 | 1.2 | 0.7 | −41 |
| sp.-sp. | SiO2-SiO2 | 66 | 0.375 | 25 | 20 | 0.9 | 0.8 | −12 |
| sp.-sp. | SiO2-SiO2 | 66 | 0.375 | 25 | 27.5 | 1.1 | 1.1 | 0 |
| sp.-sp. | PS-PS | 98 | 0.242 | 15 | 15 | 2.2 | 2.3 | +4 |
| sp.-pl. | PS-SiO2 | 80 | 0.300 | 15 | - | 2.3 | 1.3 | −43 |
| sp.-sp. | SiO2-SiO2 | 66 | 0.375 | 15 | 10 | 0.5 | 0.9 | +80 |
| sp.-sp. | SiO2-SiO2 | 66 | 0.375 | 15 | 12.5 | 0.6 | 1.0 | +66 |
| sp.-pl. | SiO2-SiO2 | 66 | 0.375 | 15 | - | 1.1 | 1.1 | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uran, S.; Šafarič, R.; Bratina, B. Reliable and Accurate Release of Micro-Sized Objects with a Gripper that Uses the Capillary-Force Method. Micromachines 2017, 8, 182. https://doi.org/10.3390/mi8060182
Uran S, Šafarič R, Bratina B. Reliable and Accurate Release of Micro-Sized Objects with a Gripper that Uses the Capillary-Force Method. Micromachines. 2017; 8(6):182. https://doi.org/10.3390/mi8060182
Chicago/Turabian StyleUran, Suzana, Riko Šafarič, and Božidar Bratina. 2017. "Reliable and Accurate Release of Micro-Sized Objects with a Gripper that Uses the Capillary-Force Method" Micromachines 8, no. 6: 182. https://doi.org/10.3390/mi8060182
APA StyleUran, S., Šafarič, R., & Bratina, B. (2017). Reliable and Accurate Release of Micro-Sized Objects with a Gripper that Uses the Capillary-Force Method. Micromachines, 8(6), 182. https://doi.org/10.3390/mi8060182