Research on the Strategy of Motion Constraint-Aided ZUPT for the SINS Positioning System of a Shearer

Abstract
:1. Introduction
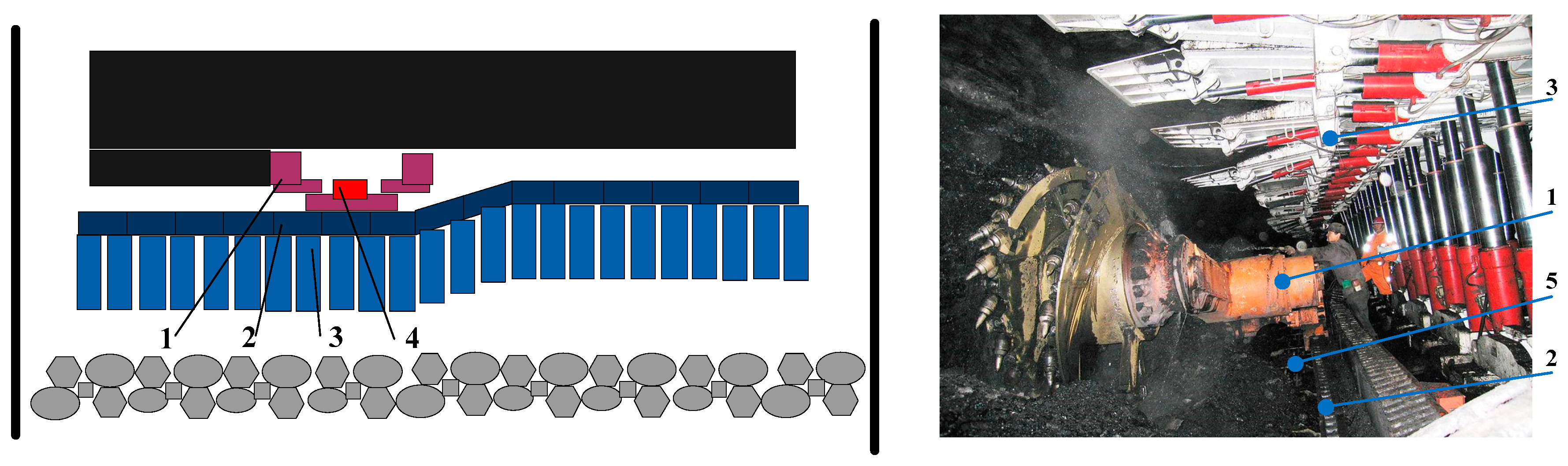
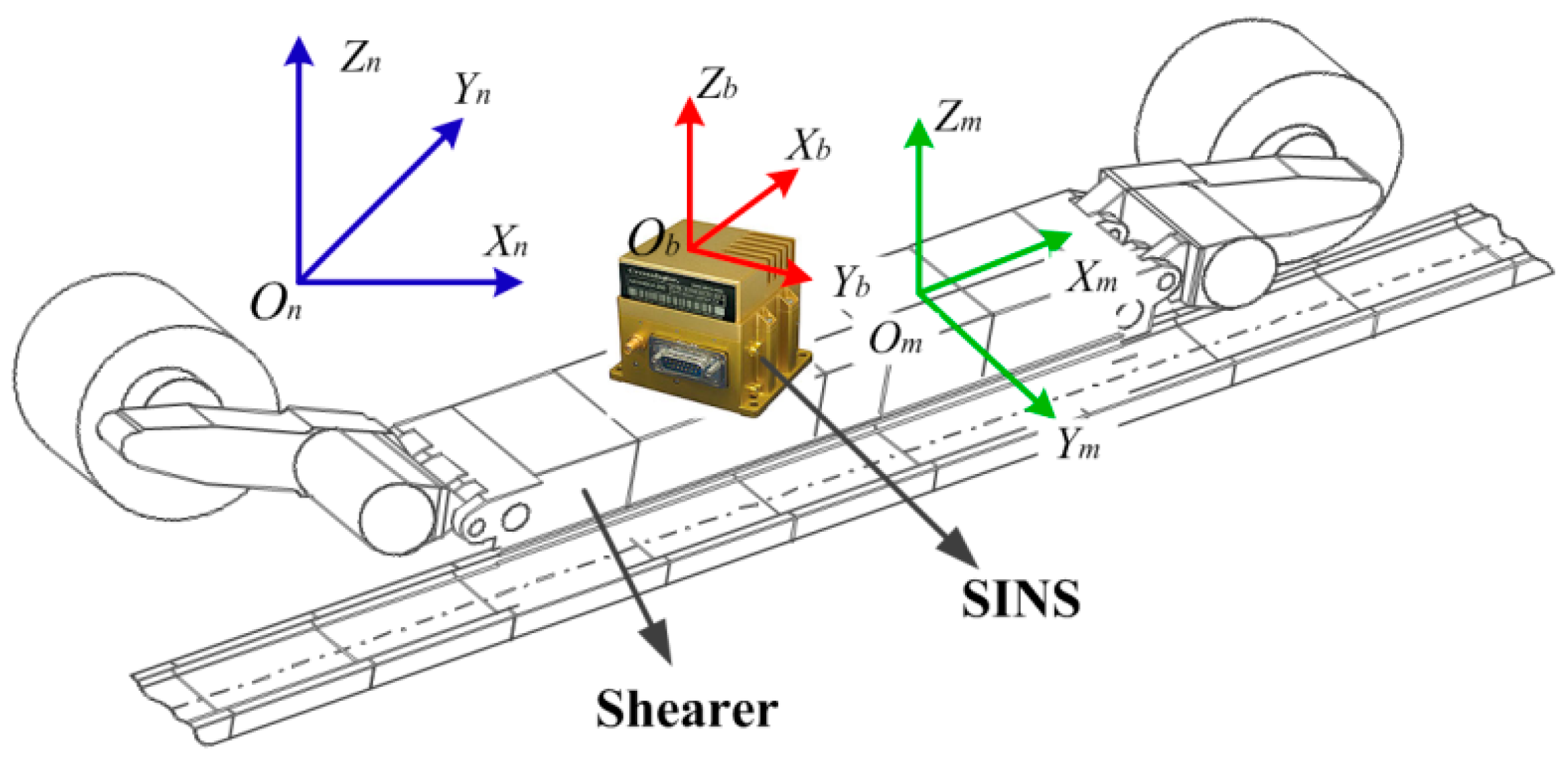
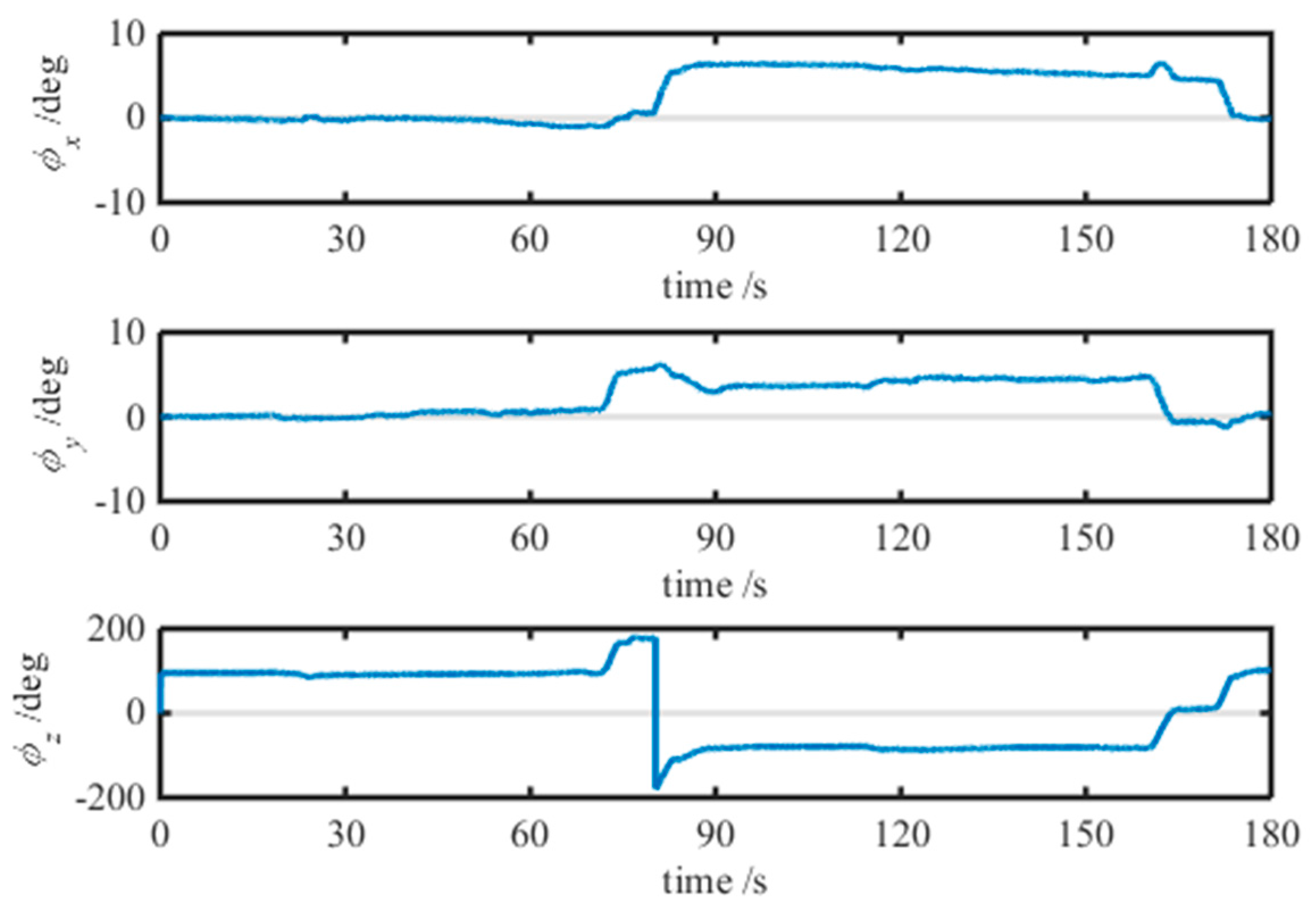
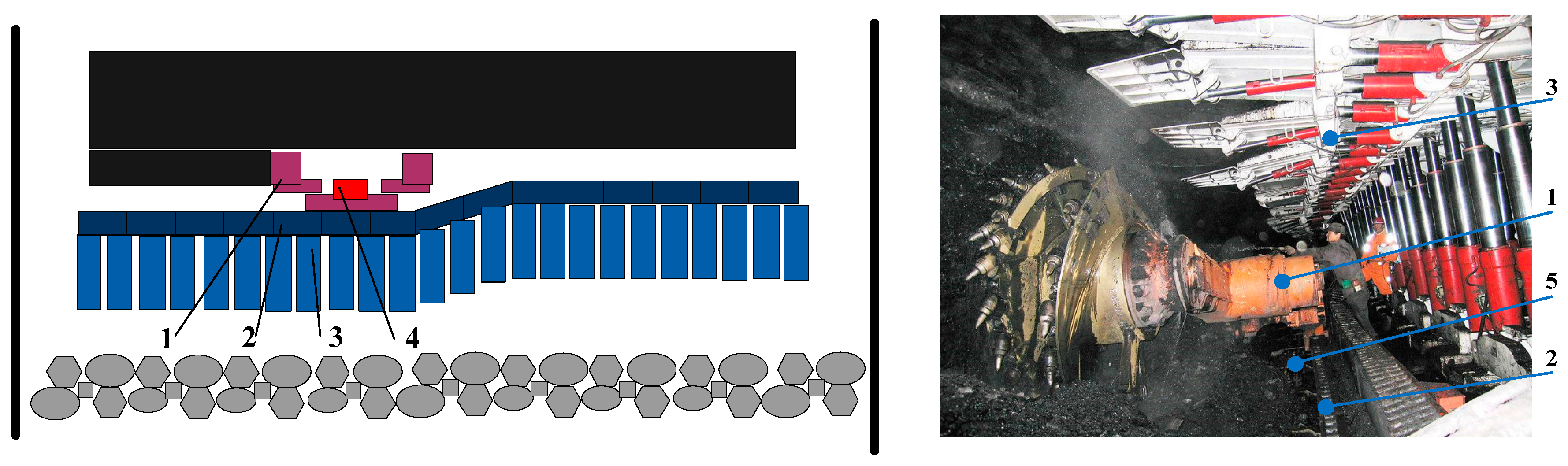
2. Motion Characteristic Analysis for Shearer
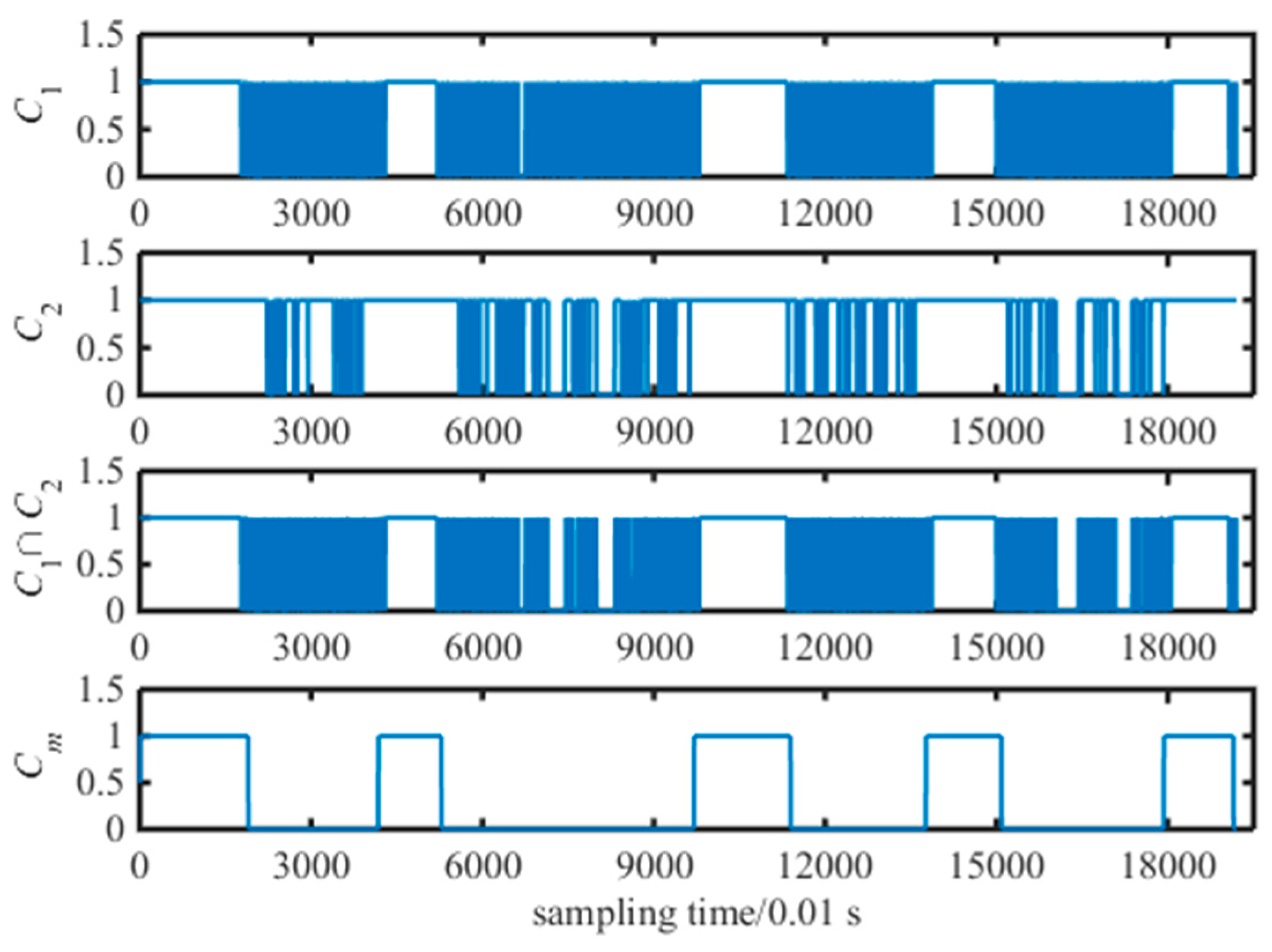
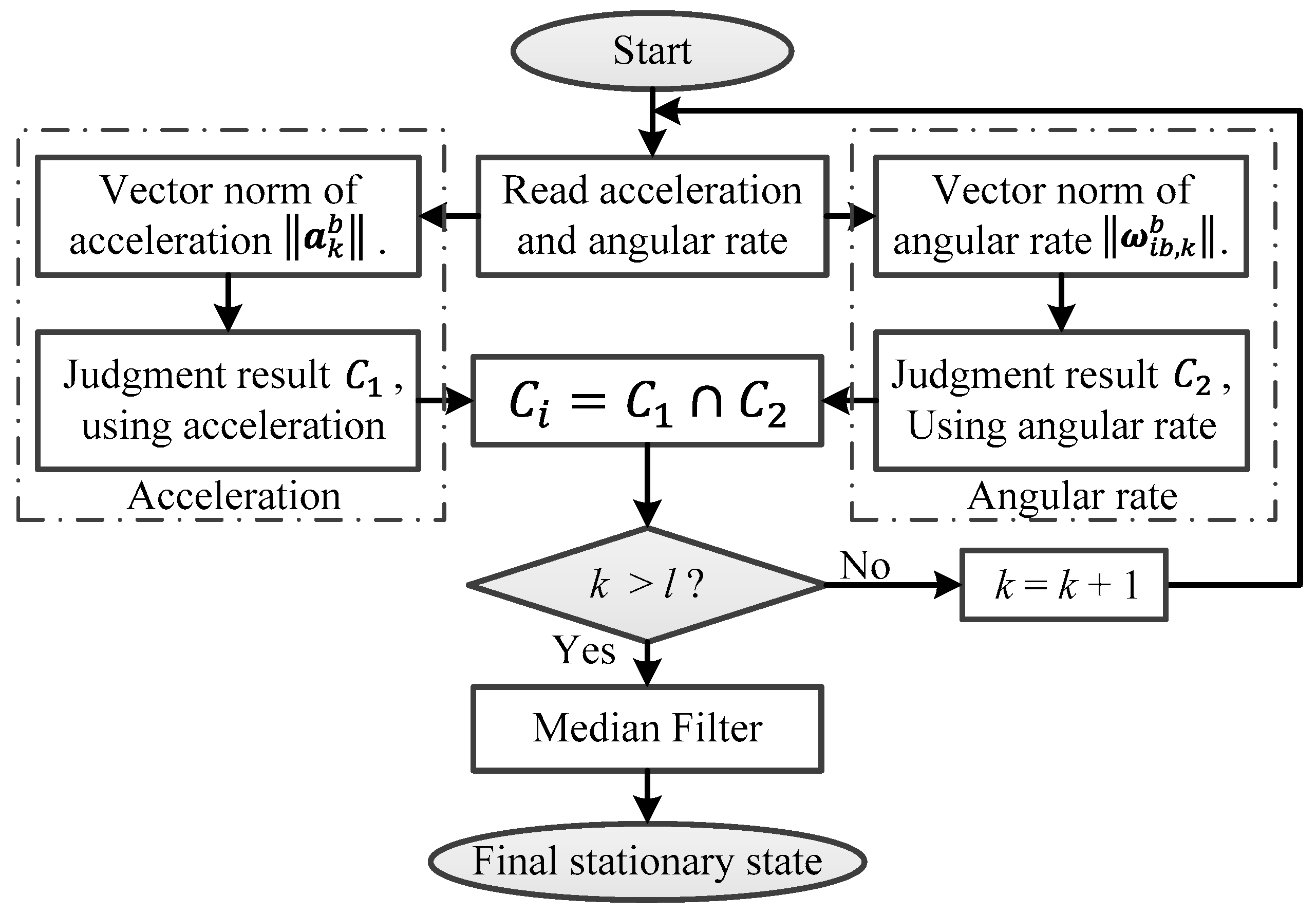
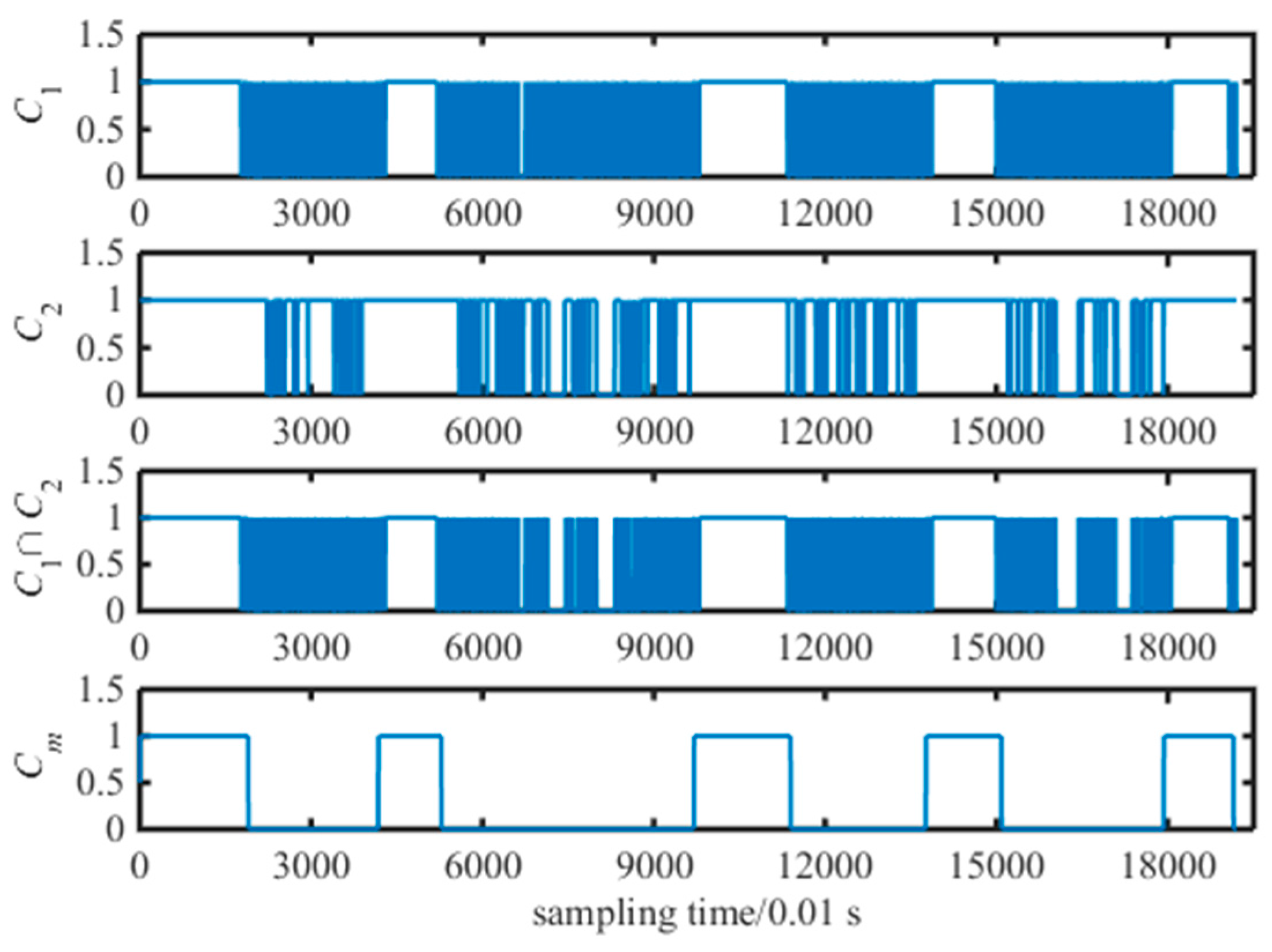
3. Stationary State Detection for the Shearer
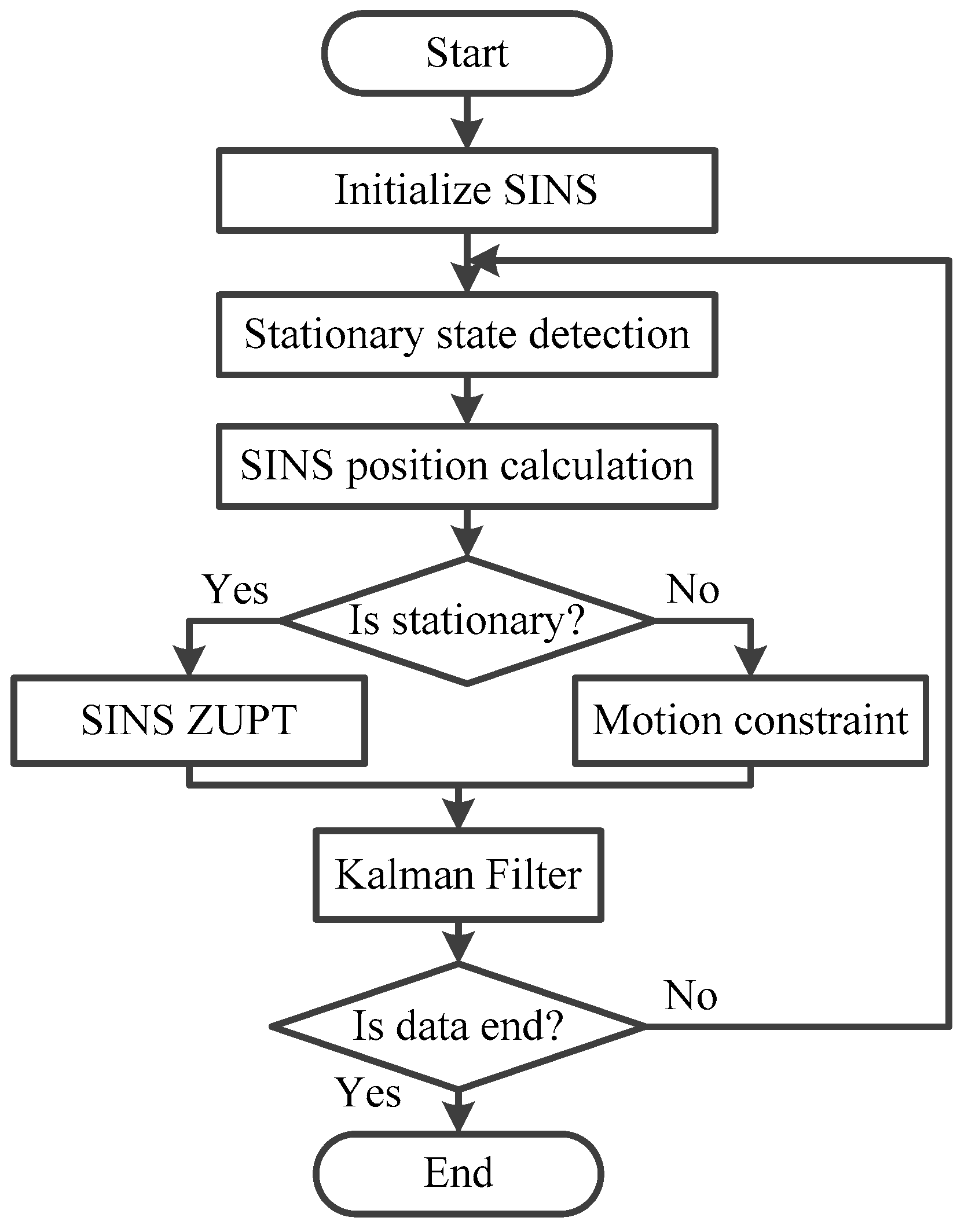
4. Motion Constraint-Aid ZUPT Model of the Shearer
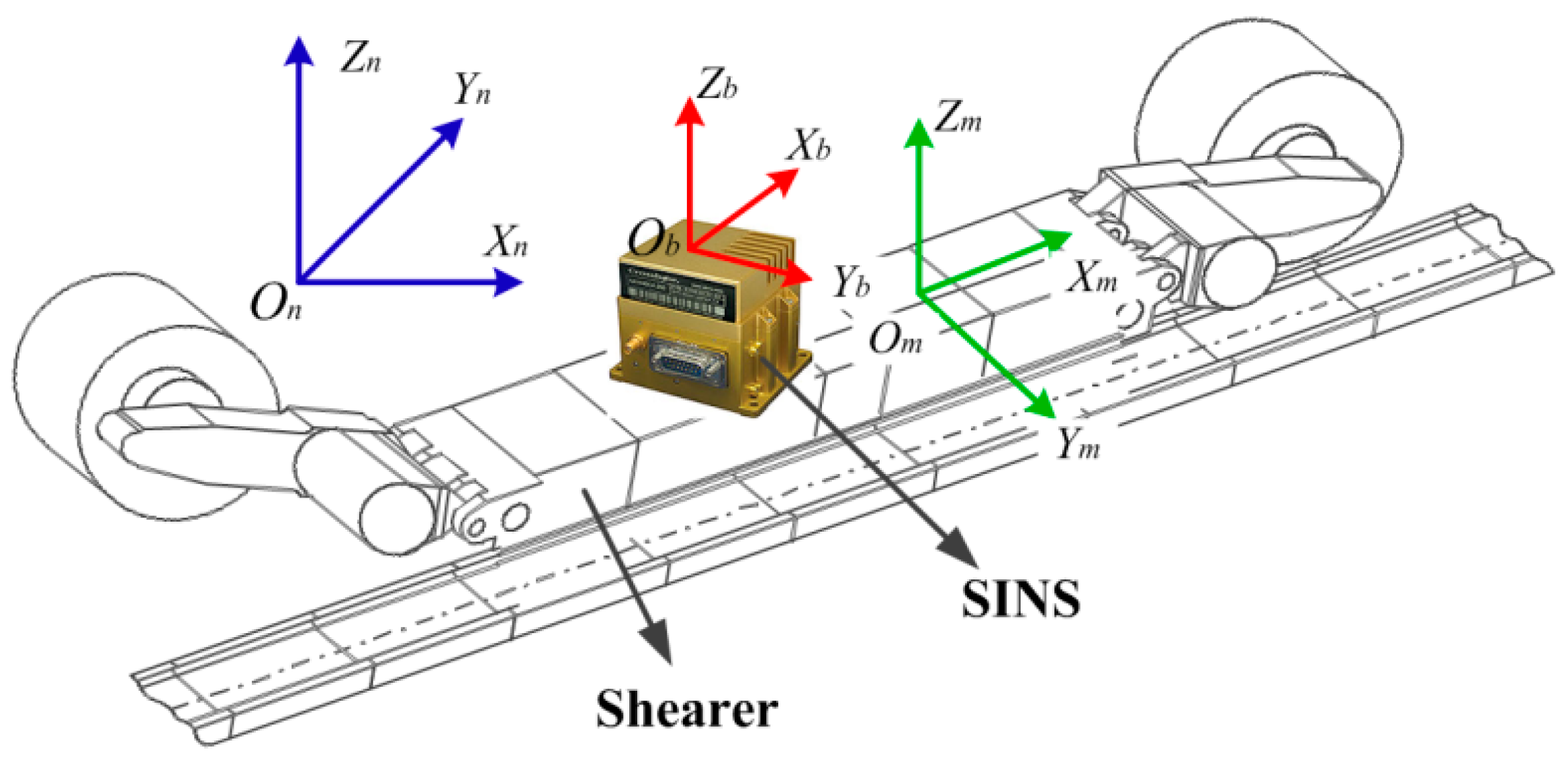
4.1. State Equation of the Shearer Motion Model
4.2. Zero Velocity Updated Model of the SINS
4.3. Motion Constraint-Aided ZUPT Algorithm of the Shearer
5. Experimental Study
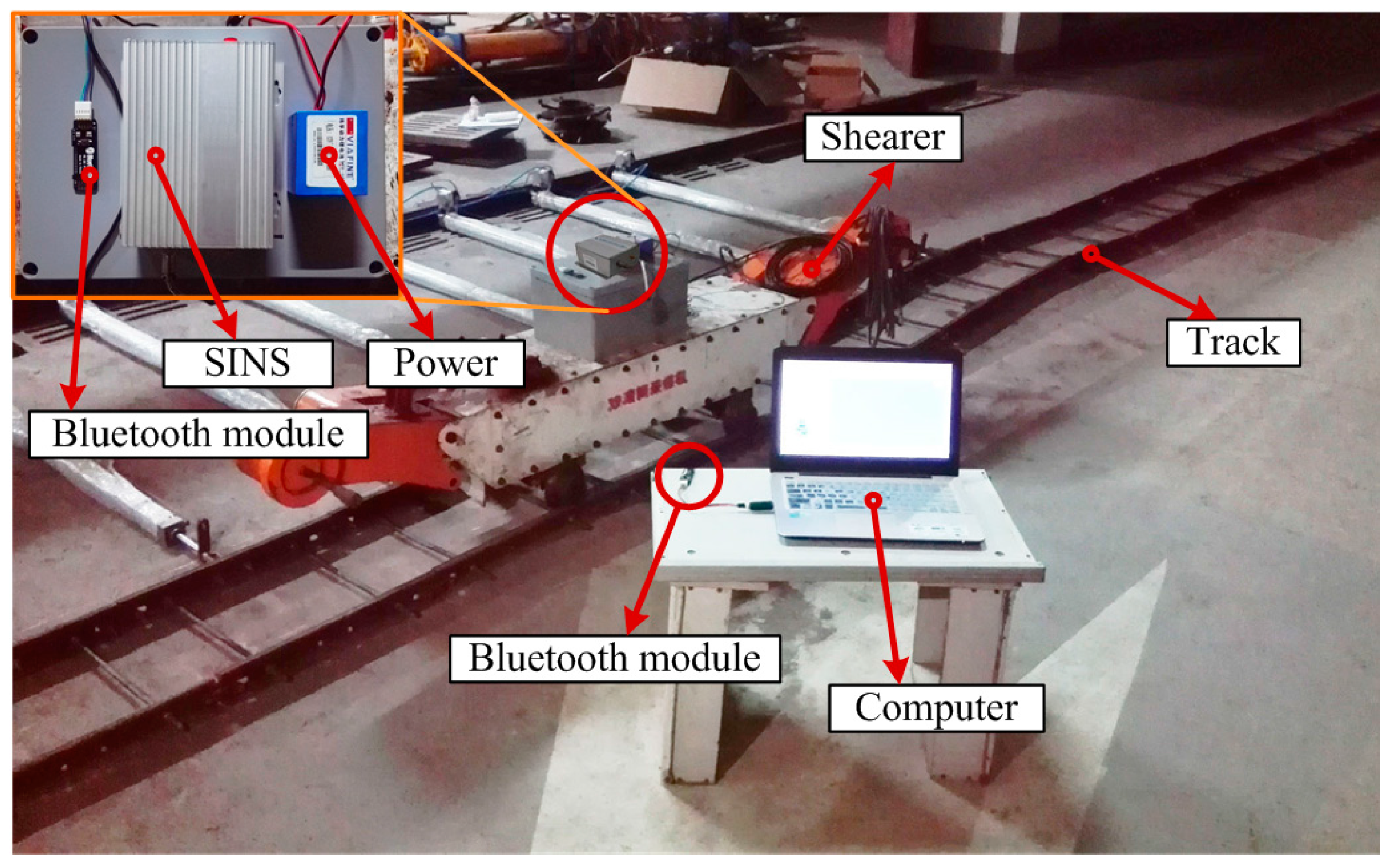
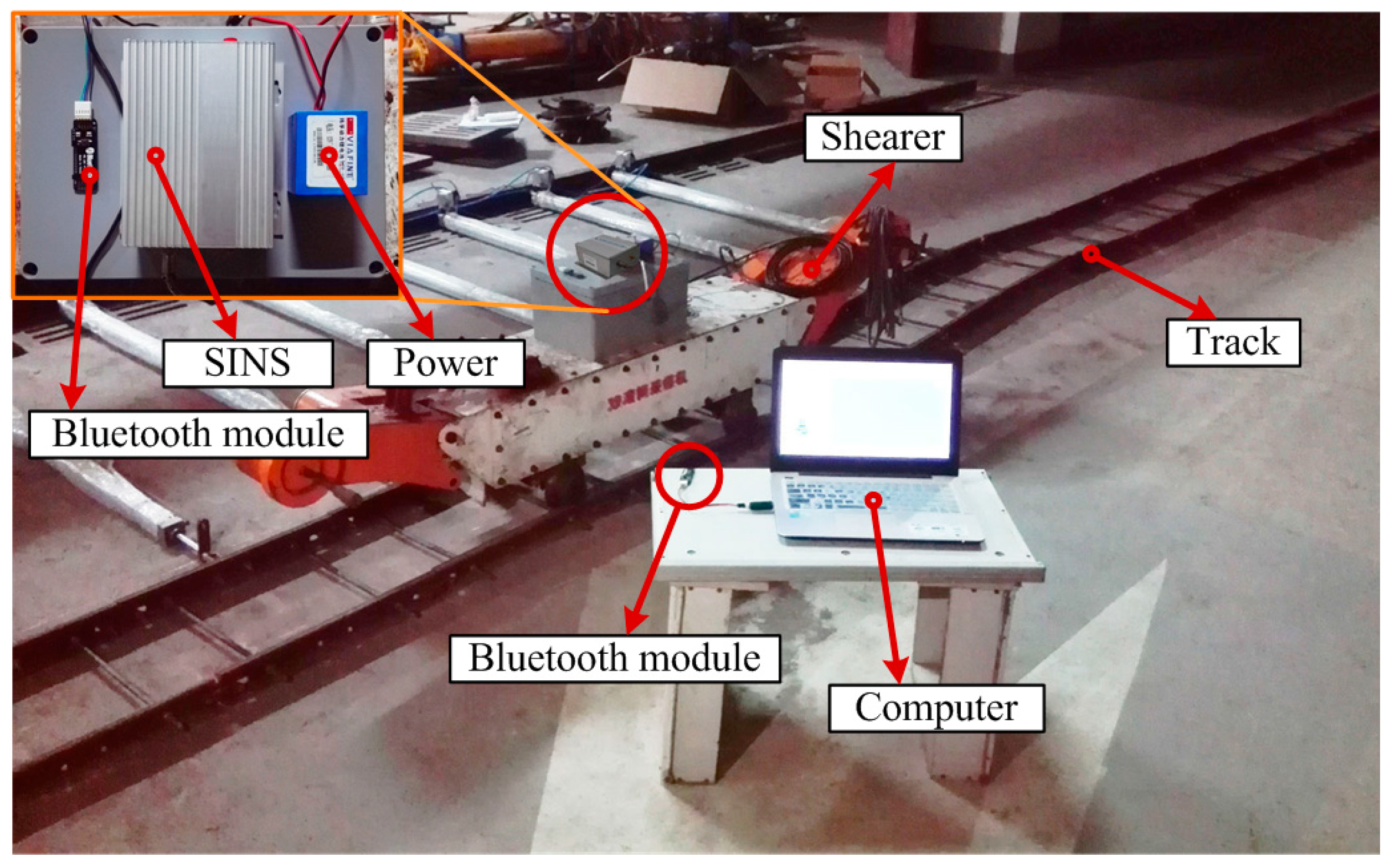
5.1. Construction of the Experimental Platform
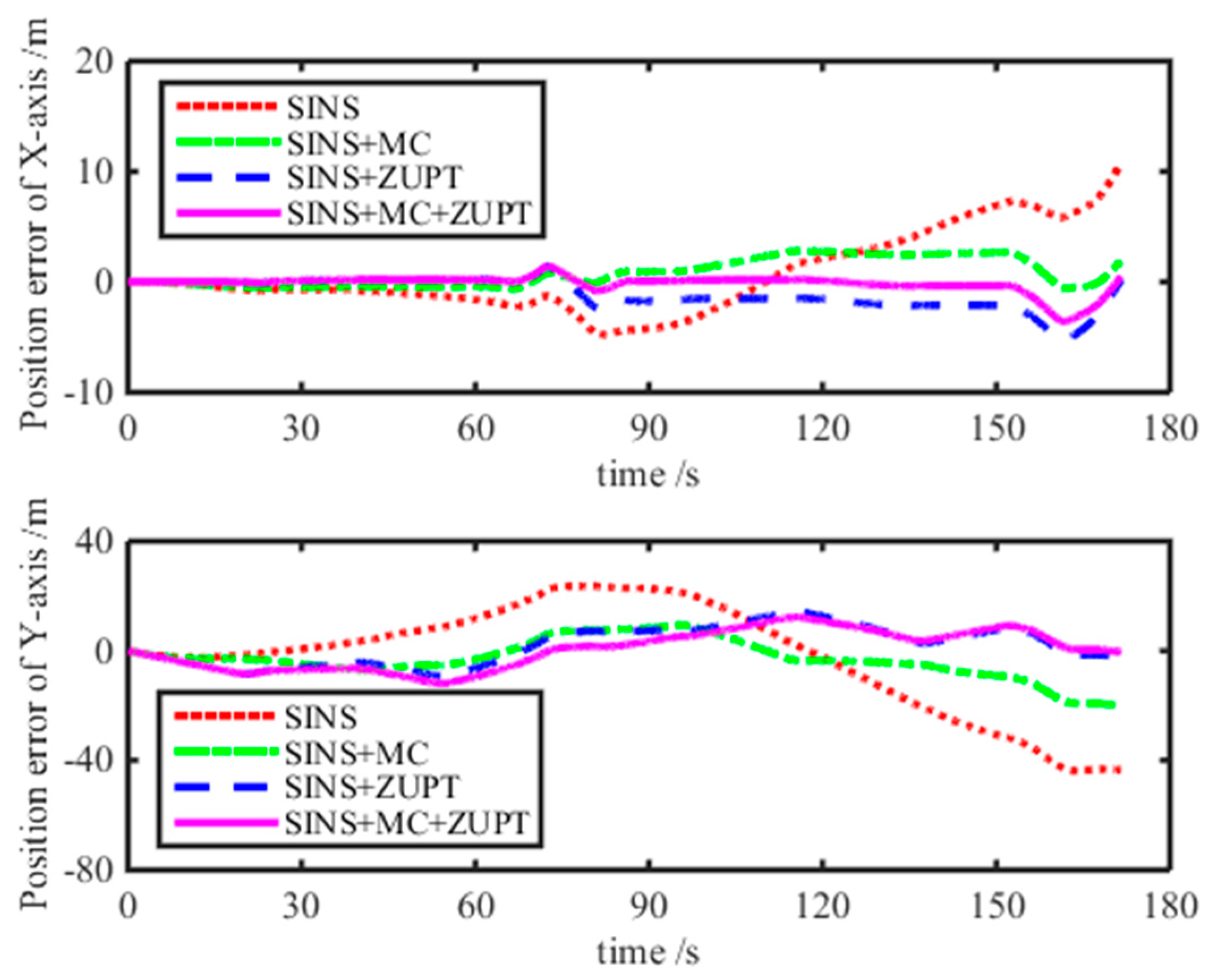
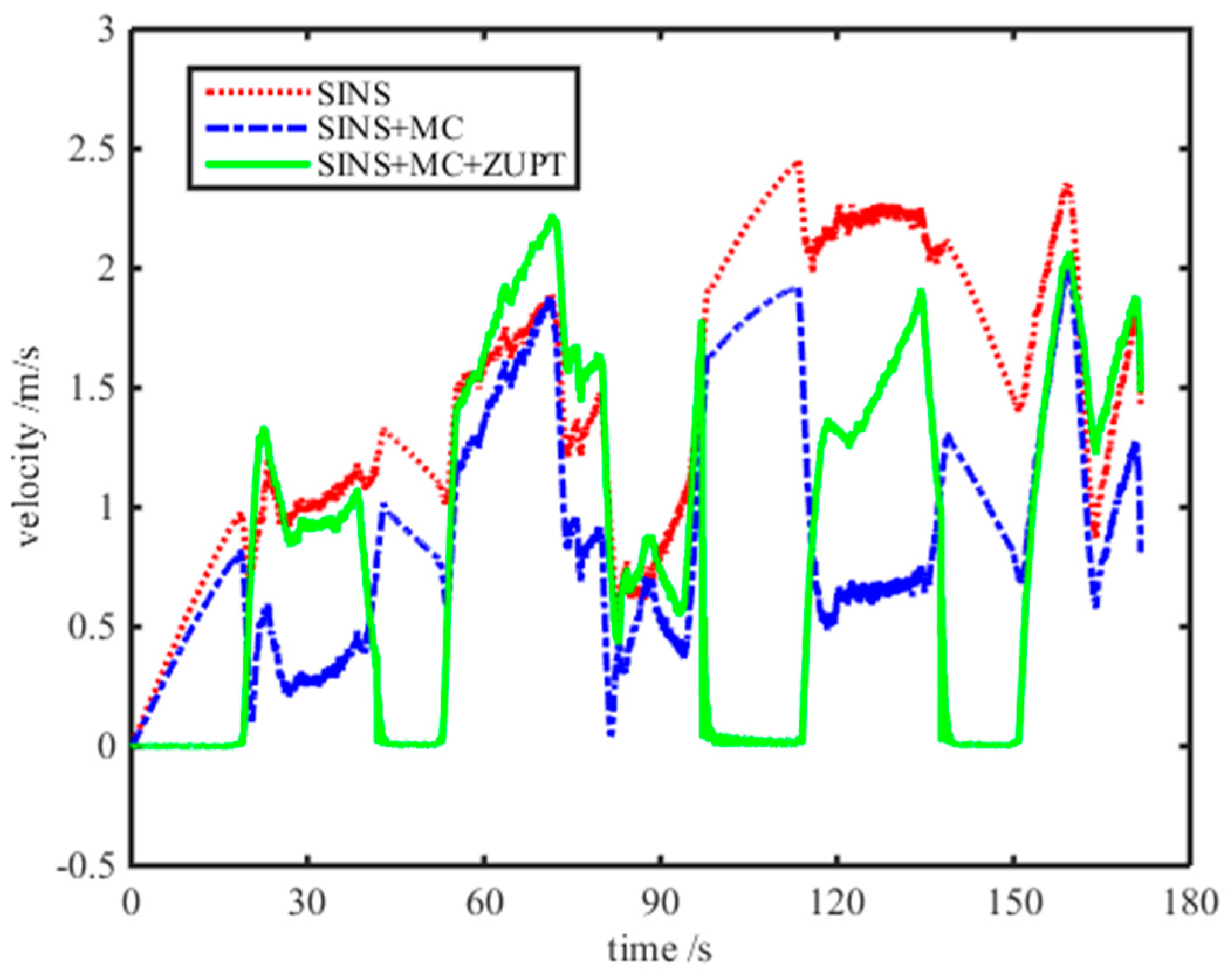
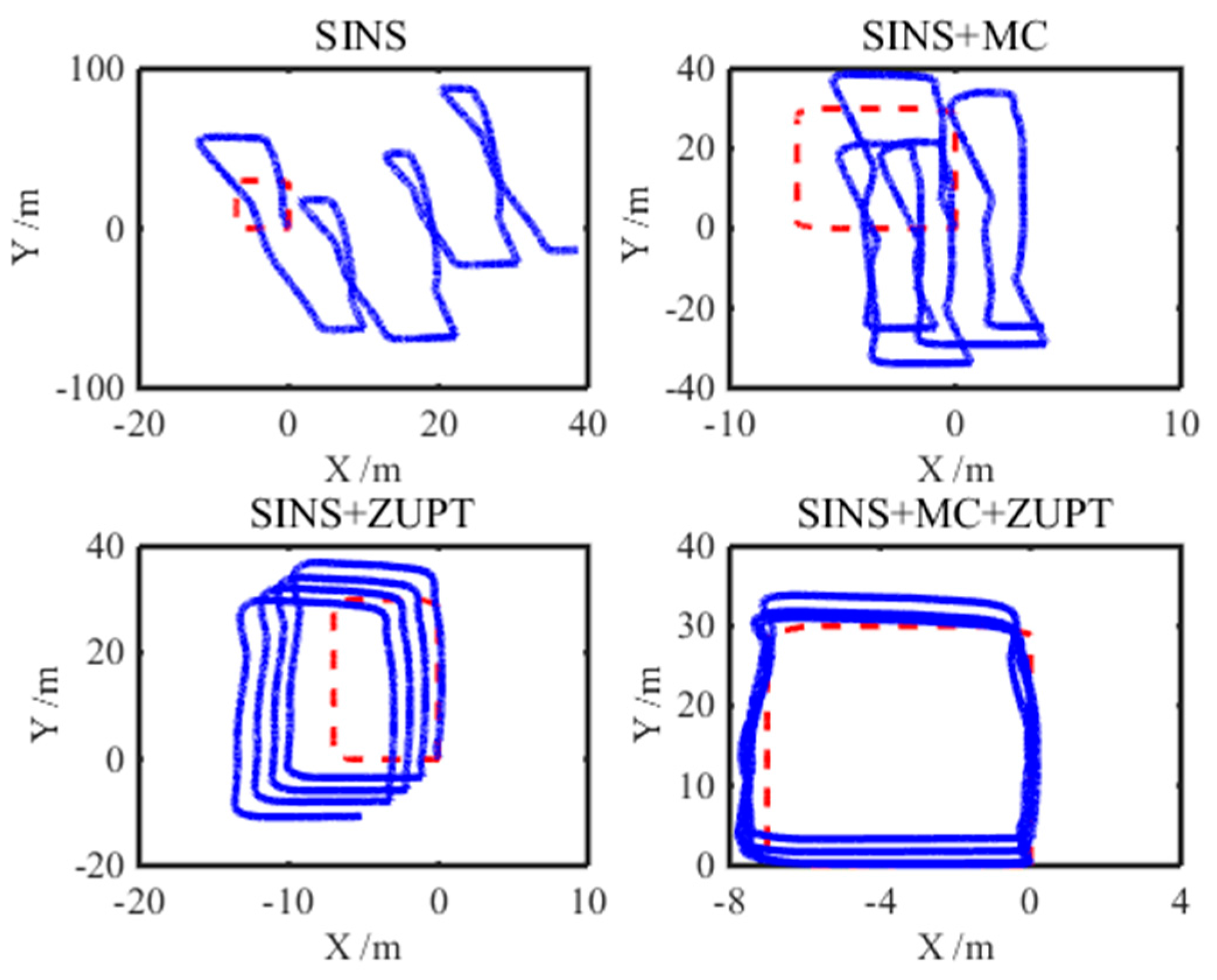
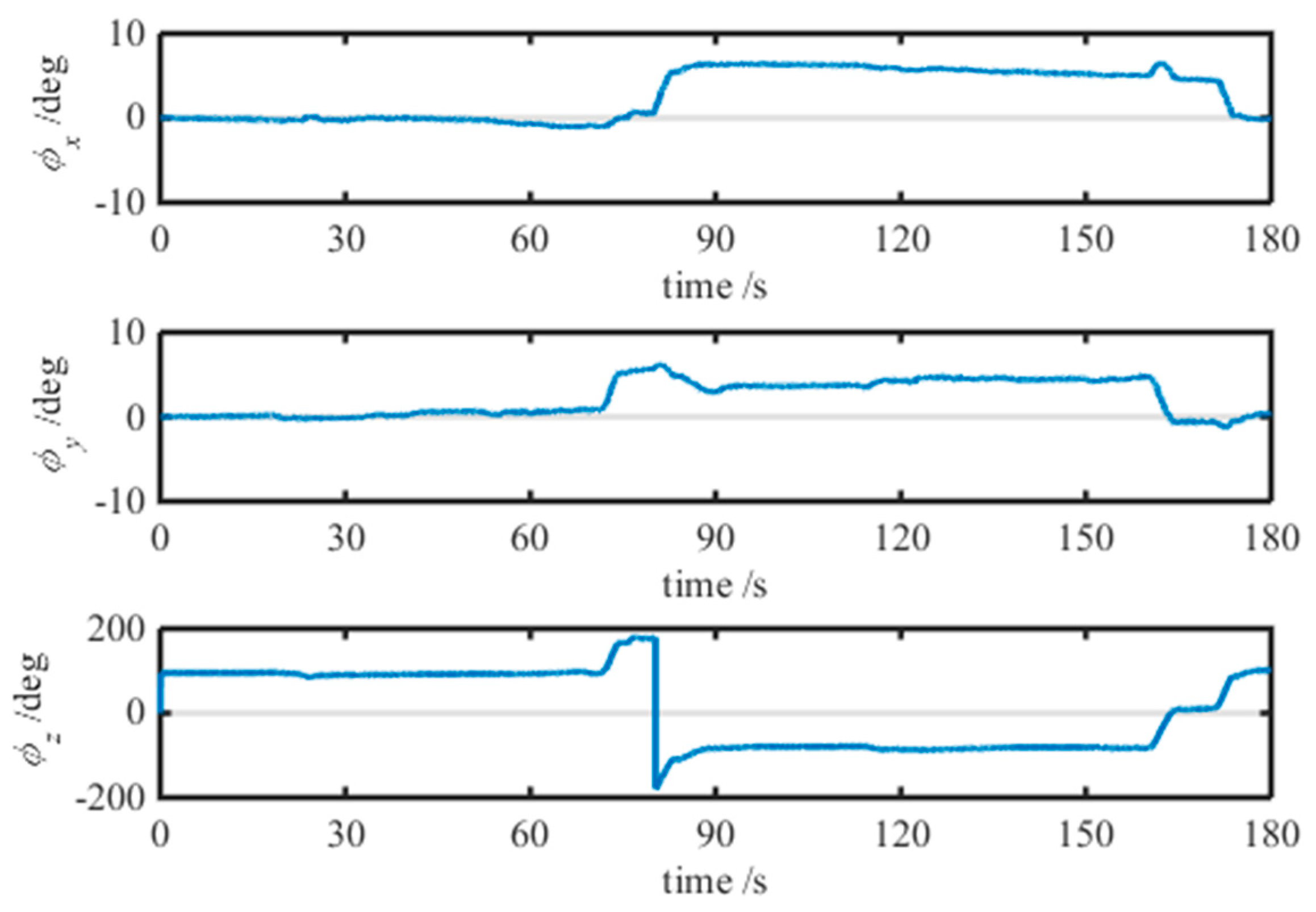
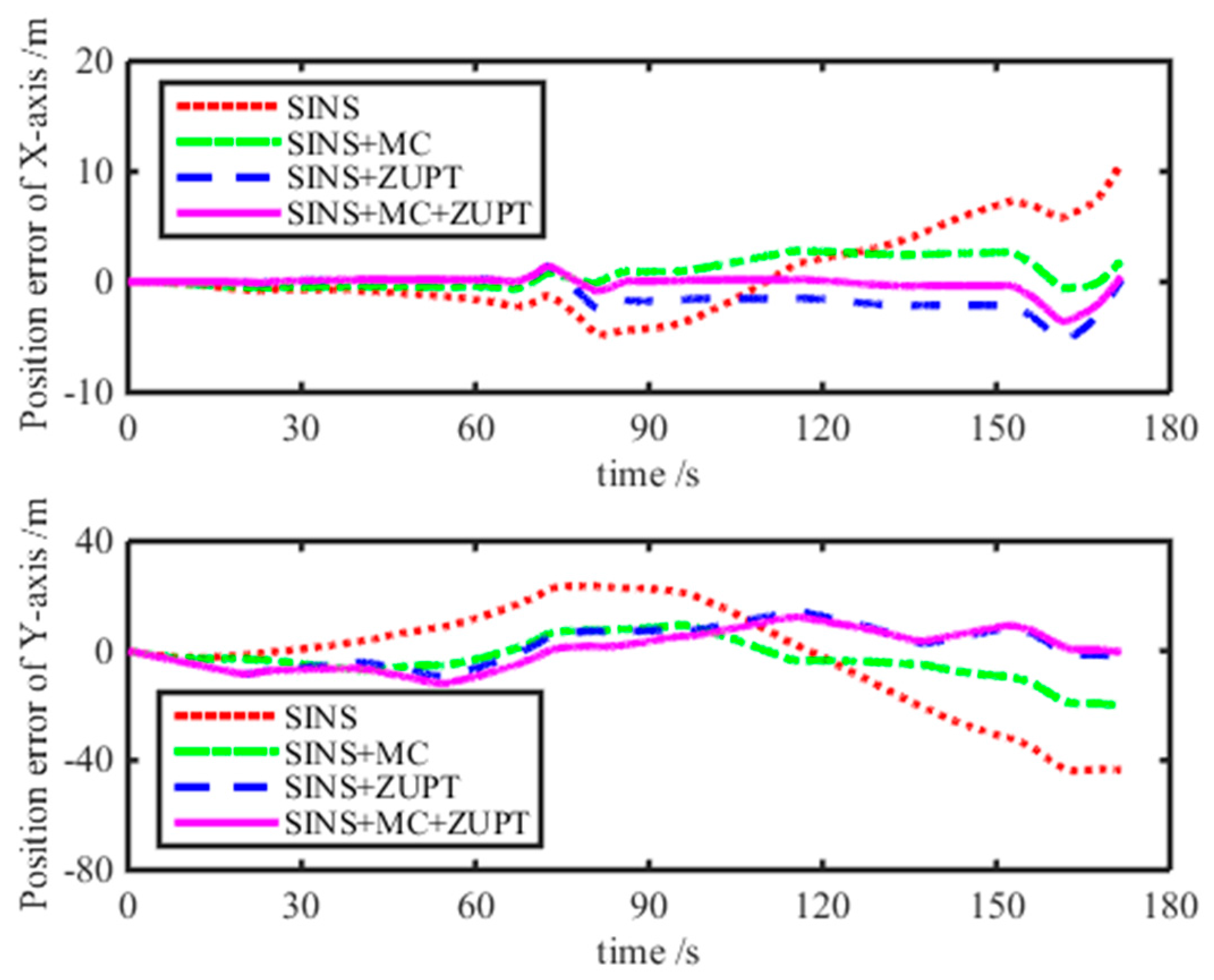
5.2. Experimental Result
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yang, H.; Li, W.; Luo, C.M.; Zhang, J.Y.; Si, Z.Y. Research on error compensation property of strap-down inertial navigation system using dynamic model of the shearer. IEEE Access 2016, 4, 2045–2055. [Google Scholar]
- Liu, C.; Gao, J.X.; Yu, X.X.; Zhang, J.X. Mine surface deformation monitoring using modified GPS RTK with surveying rod: Initial results. Surv. Rev. 2015, 341, 79–86. [Google Scholar]
- Xu, D.; Nie, B.S.; Wang, L.K.; Xue, F. Accurate localization technology in fully mechanized coal face: The first step towards coal mining industry 4.0. Disaster Adv. 2013, 6, 69–77. [Google Scholar]
- Jiang, B.Y.; Wang, L.G.; Lu, Y.L.; Wang, C.Q.; Ma, D. Combined early warning method for rockburst in a Deep Island, fully mechanized caving face. Arab. J. Geosci. 2016, 9, 1–13. [Google Scholar]
- Wang, C.; Tu, S.H.; Chen, M.; Yuan, Y. Optimal selection of a longwall mining method for a thin coal seam working face. Arab. J. Sci. Eng. 2016, 41, 3771–3781. [Google Scholar]
- Li, W.; Yang, H.; Fan, M.B.; Luo, C.M.; Zhang, J.Y.; Si, Z.Y. A fuzzy adaptive tightly-coupled integration method for mobile target localization using SINS/WSN. Micromachines 2016, 7, 197–217. [Google Scholar]
- Petritoli, E.; Leccese, F. Improvement of altitude precision in indoor and urban canyon navigation for small flying vehicles. In Proceedings of the 2nd IEEE International Workshop on Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015; Volume 7180626, pp. 56–60. [Google Scholar]
- Reid, D.C.; Hainsworth, D.W.; Ralston, J.C.; McPhee, R.J. Shearer guidance: A major advance in longwall mining. Field Serv. Robot. 2006, 4, 469–476. [Google Scholar]
- Fan, Q.G.; Li, W.; Wang, Y.Q.; Yang, X.F. A shearer dynamic positioning method using strap-down inertial navigation. J. China Coal Soc. 2011, 36, 1958–1961. [Google Scholar]
- Li, T.; Yuan, G.N.; Lan, H.Y.; Mintchev, M. Design and algorithm verification of a gyroscope-based inertial navigation system for small-diameter spaces in multilateral horizontal drilling applications. Micromachines 2015, 6, 1946–1970. [Google Scholar] [CrossRef]
- Sun, B.Q.; Wang, S.Y.; Li, H.X.; He, X.X. Decoupling control of micromachined spinning-rotor gyroscope with electrostatic suspension. Sensors 2016, 16, 1747–1759. [Google Scholar]
- Lin, T.Y.; Zhang, Z.Y.; Tian, Z.S.; Zhou, M. Low-cost BD/MEMS Tightly-coupled pedestrian navigation algorithm. Micromachines 2016, 7, 91. [Google Scholar] [CrossRef]
- Hinüber, E.L.V.; Reimer, C.; Schneider, T.; Stock, M. INS/GNSS integration for aerobatic flight applications and aircraft motion surveying. Sensors 2017, 17, 941. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Xu, X.; Zhang, T.; Li, Y.; Tong, J. A kalman filter for sins self-alignment based on vector observation. Sensors 2017, 17, 264. [Google Scholar] [CrossRef] [PubMed]
- Petritoli, E.; Giagnacovo, T.; Leccese, F. Lightweight GNSS/IRS integrated navigation system for UAV vehicles. In Proceedings of the IEEE International Workshop on Metrology for Aerospace, Benevento, Italy, 29–30 May 2014; Volume 6865894, pp. 56–61. [Google Scholar]
- Eling, C.; Klingbeil, L.; Kuhlmann, H. Real-time single-frequency GPS/MEMS-IMU attitude determination of lightweight UAVs. Sensors 2015, 15, 26212–26235. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Yang, H.; Hoeflinger, F.; Reindl, L. Adaptive zero velocity update based on velocity classification for pedestrian tracking. IEEE Sens. J. 2017, 99, 1–10. [Google Scholar] [CrossRef]
- Muhammad, I.; Kuk, C.; Seung-Ho, B.; Sangdeok, P. Drift reduction in pedestrian navigation system by exploiting motion constraints and magnetic field. Sensors 2016, 16, 1455. [Google Scholar]
- Luo, C.M.; Fan, X.N.; Ni, J.J.; Yang, H.; Zhang, X.W.; Li, W. Positioning accuracy evaluation for the collaborative automation of mining fleet with the support of memory cutting technology. IEEE Access 2016, 4, 5764–5775. [Google Scholar] [CrossRef]
- Si, L.; Wang, Z.B.; Liu, X.H.; Tan, C.; Xu, J.; Zheng, K.H. Multi-sensor data fusion identification for shearer cutting conditions based on parallel quasi-newton neural networks and the Dempster-Shafer theory. Sensors 2015, 15, 28772–28795. [Google Scholar] [CrossRef] [PubMed]
- Silva, F.O.; Hemerly, E.M.; Filho, W.C.L. Error analysis of analytical coarse alignment formulations for stationary SINS. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1777–1796. [Google Scholar] [CrossRef]
- Imani, M. RX Anomaly detector with rectified background. IEEE Geosci. Remote Sens. Lett. 2017, 8, 1313–1317. [Google Scholar] [CrossRef]
- Norrdine, A.; Kasmi, Z.; Blankenbach, J. Step detection for ZUPT-aided inertial pedestrian navigation system using foot-mounted permanent magnet. IEEE Sens. J. 2016, 16, 6766–6773. [Google Scholar] [CrossRef]
- Chang, L.B.; Zha, F.; Qin, F.J. Indirect Kalman filtering based attitude estimation for low-cost attitude and heading reference systems. IEEE ASME Trans. Mech. 2017, 22, 1850–1858. [Google Scholar] [CrossRef]
- Yu, C.Y.; El-Sheimy, N.; Lan, H.Y.; Liu, Z.B. Map-based indoor pedestrian navigation using an auxiliary particle filter. Micromachines 2017, 8, 225. [Google Scholar] [CrossRef]
- Kopacik, A.; Kajanek, P.; Liptak, I. Systematic error elimination using additive measurements and combination of two low cost IMSs. IEEE Sens. J. 2016, 16, 6239–6248. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometer | Gyroscope | ||
|---|---|---|---|
| Parameters (unit) | Value | Parameter | Value |
| Measured scale of x, y, z axis (g) | <±4 | Measured scale of Rolling, pitching, heading (°/s) | <±200 |
| Measured bias (mg) | <1 | Measured bias (°/h) | <3 |
| Nonlinearity (% FS) | <1 | Nonlinearity (% FS) | <0.15 |
| resolution ratio (mg) | <0.5 | resolution ratio (°/s) | <0.025 |
| Measured bandwidth (Hz) | 25 | Measured bandwidth (Hz) | 25 |
| Item | Axis | SINS | SINS + MC | SINS + ZUPT | SINS + MC + ZUPT |
|---|---|---|---|---|---|
| Position error range (m) | x | −4.3382 to 10.6647 | −1.4900 to 2.8976 | −2.3743 to 0.2435 | −1.2728 to 0.4189 |
| y | −44.0027 to 23.8298 | −19.3788 to 8.2045 | −1.5554 to 7.5550 | −1.7483 to 2.9030 | |
| Variance | x | 7.9740 | 0.9498 | 0.4527 | 0.0341 |
| y | 239.9170 | 40.0222 | 2.9617 | 0.7557 | |
| Maximum (m) | 44.9933 | 19.5625 | 7.7194 | 1.4552 | |
| Average (m) | 18.4780 | 7.6836 | 2.9190 | 0.6207 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Li, W.; Luo, T.; Liang, H.; Zhang, H.; Gu, Y.; Luo, C. Research on the Strategy of Motion Constraint-Aided ZUPT for the SINS Positioning System of a Shearer. Micromachines 2017, 8, 340. https://doi.org/10.3390/mi8110340
Yang H, Li W, Luo T, Liang H, Zhang H, Gu Y, Luo C. Research on the Strategy of Motion Constraint-Aided ZUPT for the SINS Positioning System of a Shearer. Micromachines. 2017; 8(11):340. https://doi.org/10.3390/mi8110340
Chicago/Turabian StyleYang, Hai, Wei Li, Tao Luo, Haibo Liang, He Zhang, Yaxiong Gu, and Chengming Luo. 2017. "Research on the Strategy of Motion Constraint-Aided ZUPT for the SINS Positioning System of a Shearer" Micromachines 8, no. 11: 340. https://doi.org/10.3390/mi8110340
APA StyleYang, H., Li, W., Luo, T., Liang, H., Zhang, H., Gu, Y., & Luo, C. (2017). Research on the Strategy of Motion Constraint-Aided ZUPT for the SINS Positioning System of a Shearer. Micromachines, 8(11), 340. https://doi.org/10.3390/mi8110340