Exploiting Stretchable Metallic Springs as Compliant Electrodes for Cylindrical Dielectric Elastomer Actuators (DEAs)


Abstract
1. Introduction
2. Design and Simulations
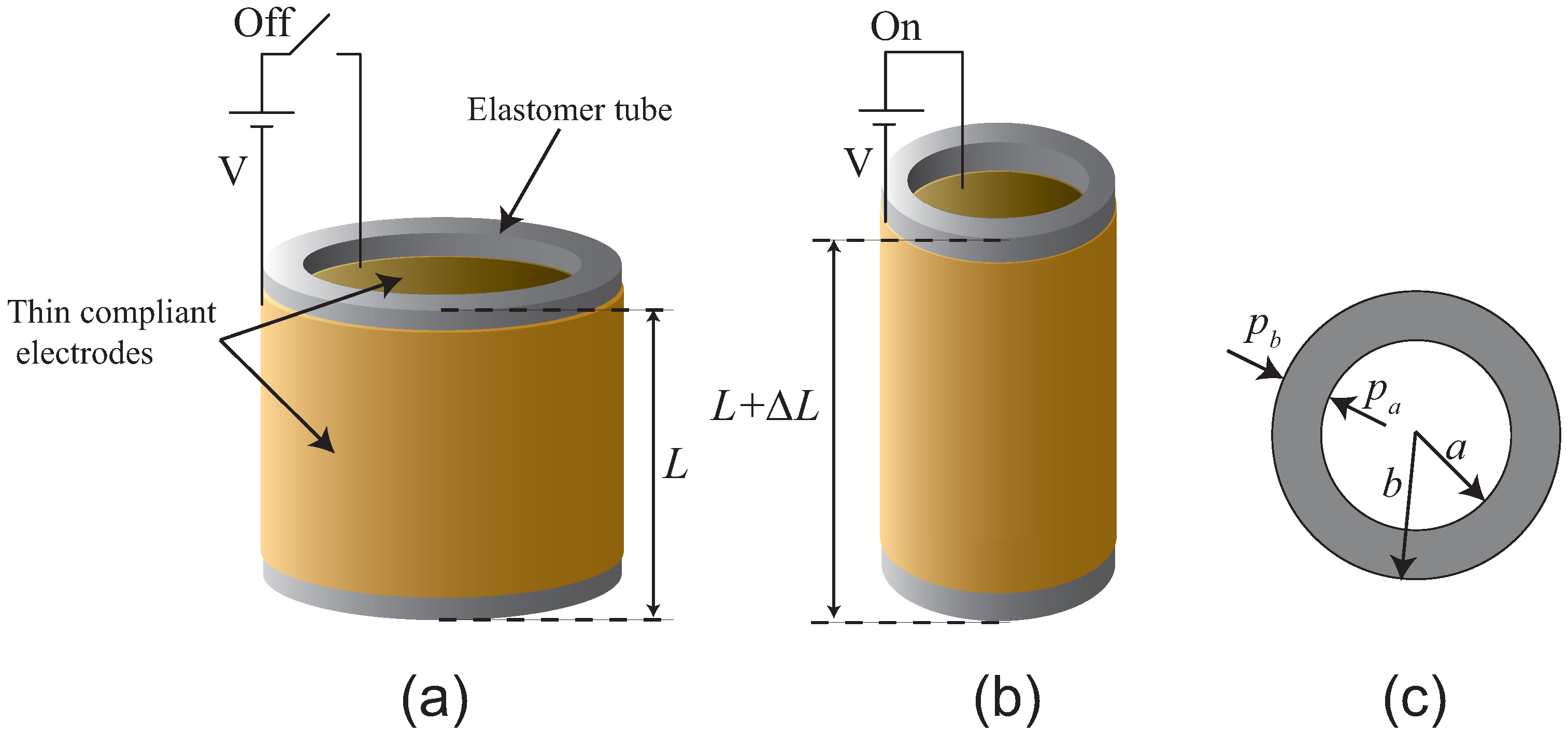
2.1. Geometric Configuration
2.2. Modeling
3. Fabrication
4. Characterization of Mechanical Properties
5. Electromechanical Properties
5.1. Experiment Setup
5.2. Experiment Results
5.3. Effects of Varying Applied Voltage
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shian, S.; Diebold, R.M.; Clarke, D.R. Tunable lenses using transparent dielectric elastomer actuators. Opt. Express 2013, 21, 8669–8676. [Google Scholar] [CrossRef] [PubMed]
- Chee, P.S.; Mah, C.K.; Ali, M.S.M. Soft dielectric elastomer actuator for micropump application. In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 561–564. [Google Scholar]
- Koh, S.J.A.; Zhao, X.; Suo, Z. Maximal energy that can be converted by a dielectric elastomer generator. Appl. Phys. Lett. 2009, 94, 262902. [Google Scholar] [CrossRef]
- Kornbluh, R.D.; Pelrine, R.; Pei, Q.; Heydt, R.; Stanford, S.; Oh, S.; Eckerle, J. Electroelastomers: Applications of dielectric elastomer transducers for actuation, generation, and smart structures. Proc. SPIE Electroact. Polym. Actuators Devices 2002, 4698, 254–270. [Google Scholar]
- Zhao, J.; Niu, J.; Liu, L.; Yu, J. A soft creeping robot actuated by dielectric elastomer. Proc. SPIE Int. Soc. Opt. Eng. 2014, 9056, 905608. [Google Scholar]
- Jung, K.; Nam, J.; Lee, Y.; Choi, H. Micro inchworm robot actuated by artificial muscle actuator based on nonprestrained dielectric elastomer. Proc. SPIE Electroact. Polym. Actuators Devices 2004, 5385, 357–367. [Google Scholar]
- Kovacs, G. Arm Wrestling Robot Driven by Dielectric Elastomer Actuators. In Proceedings of the First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Pisa, Italy, 20–22 February 2006; pp. 260–265. [Google Scholar]
- Miriyev, A.; Stack, K.; Lipson, H. Soft material for soft actuators. Nat. Commun. 2017, 8, 596. [Google Scholar] [CrossRef] [PubMed]
- Bar-Cohen, Y. Bionic Humans Using EAP as Artificial Muscles Reality and Challenges. Int. J. Adv. Robot. Syst. 2004, 1, 217–222. [Google Scholar] [CrossRef]
- Choi, H.R.; Jung, K.; Ryew, S.; Nam, J.D.; Jeon, J.; Koo, J.C.; Tanie, K. Biomimetic soft actuator: Design, modeling, control, and applications. IEEE/ASME Trans. Mechatron. 2005, 10, 581–593. [Google Scholar] [CrossRef]
- Anderson, I.A.; Gisby, T.A.; McKay, T.G.; O’Brien, B.M.; Calius, E.P. Multi-functional dielectric elastomer artificial muscles for soft and smart machines. J. Appl. Phys. 2012, 112, 041101. [Google Scholar] [CrossRef]
- Carpi, F.; De Rossi, D. Dielectric elastomer cylindrical actuators: Electromechanical modelling and experimental evaluation. Mater. Sci. Eng. C 2004, 24, 555–562. [Google Scholar] [CrossRef]
- Cameron, C.G.; Szabo, J.P.; Johnstone, S.; Massey, J.; Leidner, J. Linear actuation in coextruded dielectric elastomer tubes. Sens. Actuators A Phys. 2008, 147, 286–291. [Google Scholar] [CrossRef]
- Kofod, G.; Stoyanov, H.; Gerhard, R. Multilayer coaxial fiber dielectric elastomers for actuation and sensing. Appl. Phys. A 2011, 102, 577–581. [Google Scholar] [CrossRef]
- An, L.; Wang, F.; Cheng, S.; Lu, T.; Wang, T.J. Experimental investigation of the electromechanical phase transition in a dielectric elastomer tube. Smart Mater. Struct. 2015, 24, 035006. [Google Scholar] [CrossRef]
- Carpi, F.; Migliore, A.; Serra, G.; Rossi, D.D. Helical dielectric elastomer actuators. Smart Mater. Struct. 2005, 14, 1210. [Google Scholar] [CrossRef]
- Rajamani, A.; Grissom, M.D.; Rahn, C.D.; Zhang, Q. Wound Roll Dielectric Elastomer Actuators: Fabrication, Analysis, and Experiments. IEEE/ASME Trans. Mechatron. 2008, 13, 117–124. [Google Scholar] [CrossRef]
- Pei, Q.; Pelrine, R.; Stanford, S.; Kornbluh, R.D.; Rosenthal, M.S.; Meijer, K.; Full, R.J. Multifunctional electroelastomer rolls and their application for biomimetic walking robots. Int. Soc. Opt. Photonics 2002, 4698, 246–254. [Google Scholar]
- Pei, Q.; Rosenthal, M.; Stanford, S.; Prahlad, H.; Pelrine, R. Multiple-degrees-of-freedom electroelastomer roll actuators. Smart Mater. Struct. 2004, 13, N86. [Google Scholar] [CrossRef]
- Carpi, F.; Salaris, C.; Rossi, D.D. Folded dielectric elastomer actuators. Smart Mater. Struct. 2007, 16, S300. [Google Scholar] [CrossRef]
- Schlaak, H.F.; Jungmann, M.; Matysek, M.; Lotz, P. Novel multilayer electrostatic solid state actuators with elastic dielectric (Invited Paper). Int. Soc. Opt. Photonics 2005, 5759, 121–134. [Google Scholar]
- Huang, J.C. Carbon black filled conducting polymers and polymer blends. Adv. Polym. Technol. 2002, 21, 299–313. [Google Scholar] [CrossRef]
- Rwei, S.P.; Ku, F.H.; Cheng, K.C. Dispersion of carbon black in a continuous phase: Electrical, rheological, and morphological studies. Colloid Polym. Sci. 2002, 280, 1110–1115. [Google Scholar]
- Kujawski, M.; Pearse, J.D.; Smela, E. Elastomers filled with exfoliated graphite as compliant electrodes. Carbon 2010, 48, 2409–2417. [Google Scholar] [CrossRef]
- Robinson, A.P.; Minev, I.; Graz, I.M.; Lacour, S.P. Microstructured Silicone Substrate for Printable and Stretchable Metallic Films. Langmuir 2011, 27, 4279–4284. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez, M.; Axisa, F.; Bulcke, M.V.; Brosteaux, D.; Vandevelde, B.; Vanfleteren, J. Design of metal interconnects for stretchable electronic circuits. Microelectron. Reliab. 2008, 48, 825–832. [Google Scholar] [CrossRef]
- Lacour, S.P.; Jones, J.; Suo, Z.; Wagner, S. Design and performance of thin metal film interconnects for skin-like electronic circuits. IEEE Electron Device Lett. 2004, 25, 179–181. [Google Scholar] [CrossRef]
- Rosset, S.; Shea, H.R. Flexible and stretchable electrodes for dielectric elastomer actuators. Appl. Phys. A 2012, 110, 281–307. [Google Scholar] [CrossRef]
- Bozlar, M.; Punckt, C.; Korkut, S.; Zhu, J.; Foo, C.C.; Suo, Z.; Aksay, I.A. Dielectric elastomer actuators with elastomeric electrodes. Appl. Phys. Lett. 2012, 101, 091907. [Google Scholar] [CrossRef]
- Kujawski, M.; Pearse, J.; Smela, E. PDMS/graphite stretchable electrodes for dielectric elastomer actuators. Proc. SPIE Electroact. Polym. Actuators Devices 2010, 7642, 76420R. [Google Scholar]
- Chuc, N.H.; Park, J.K.; Thuy, D.V.; Kim, H.S.; Koo, J.C.; Lee, Y.; Nam, J.D.; Choi, H.R. Multi-stacked artificial muscle actuator based on synthetic elastomer. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, USA, 29 October–2 November 2007; pp. 771–776. [Google Scholar]
- Vlad Carlescu, F.B. Electromechanical Strain Response of PDMS/TiO2/SiO2 at Variable Electric Fields. Mater. Plast. 2013, 50, 141–145. [Google Scholar]
- Min Young Jung, N.H.C. Fabrication and characterization of linear motion dielectric elastomer actuators. Proc. SPIE Int. Soc. Opt. Eng. 2006, 6168, 616824. [Google Scholar]
- Hung, Y.C.; Liu, C.H. Stretchable frequency selective surfaces for large-area-tuning and high-power applications. In Proceedings of the 2016 International Symposium on Antennas and Propagation (ISAP), Okinawa, Japan, 24–28 October 2016; pp. 942–943. [Google Scholar]
- Pelrine, R.; Kornbluh, R.; Pei, Q.; Joseph, J. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef] [PubMed]
- Pharr, M.; Sun, J.Y.; Suo, Z. Rupture of a highly stretchable acrylic dielectric elastomer. J. Appl. Phys. 2012, 111, 104114. [Google Scholar] [CrossRef]
- Chen, J.A.; Lee, Y.T.; Chang, Y.M.; Liu, C.H.; Shih, W.P. Stretchable spring electrodes for cylindrical dielectric elastomer actuators. In Proceedings of the 2016 2nd International Conference on Control, Automation and Robotics (ICCAR), Hong Kong, China, 28–30 April 2016; pp. 273–276. [Google Scholar]
- McKay, T.G.; Calius, E.; Anderson, I.A. The dielectric constant of 3M VHB: A parameter in dispute. Int. Soc. Opt. Photonics 2009, 7287, 72870P. [Google Scholar]
- 3MTM VHBTM Tape 4905. Available online: https://www.3m.com/3M/en_US/company-us/all-3mproducts/~/3M-VHB-Tape-4905?N=5002385+3293241546&rt=rud (accessed on 22 November 2017).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meaning | Value (mm) | |
|---|---|---|
| d | Diameter of springs | 0.5 |
| a | Inner radius of VHB film | 8 |
| b | Outer radius of VHB film | 8.5 |
| L | Total length | 30 |
| Parameters | Value |
|---|---|
| 6 [38] | |
| a | 8 mm |
| b | 8.5 mm |
| L | 30 mm |
| Y | 18 kPa [39] |
| Axial Strain (%) | E-Field (V/m) | Max. Axial Strain (%) | E-Field (V/m) | |
|---|---|---|---|---|
| Cylindrical coextruded tube [13] | 0.7 | 20 | 1.9 | 36 |
| Cylindrical tube [12] | 0.3 | 20 | 4.5 | 100 |
| co-axial tube [14] | 4 | 20 | 7 | 24 |
| Helix [16] | 20 | 5 | 14 | |
| Roll [17] | 1.8 | 20 | 12.77 | 58 |
| Folded [20] | 20 | 15.5 | 12 | |
| Our work | 2.35 | 20 | 2.35 | 20 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.-H.; Lin, P.-W.; Chen, J.-A.; Lee, Y.-T.; Chang, Y.-M. Exploiting Stretchable Metallic Springs as Compliant Electrodes for Cylindrical Dielectric Elastomer Actuators (DEAs). Micromachines 2017, 8, 339. https://doi.org/10.3390/mi8110339
Liu C-H, Lin P-W, Chen J-A, Lee Y-T, Chang Y-M. Exploiting Stretchable Metallic Springs as Compliant Electrodes for Cylindrical Dielectric Elastomer Actuators (DEAs). Micromachines. 2017; 8(11):339. https://doi.org/10.3390/mi8110339
Chicago/Turabian StyleLiu, Chien-Hao, Po-Wen Lin, Jui-An Chen, Yi-Tsung Lee, and Yuan-Ming Chang. 2017. "Exploiting Stretchable Metallic Springs as Compliant Electrodes for Cylindrical Dielectric Elastomer Actuators (DEAs)" Micromachines 8, no. 11: 339. https://doi.org/10.3390/mi8110339
APA StyleLiu, C.-H., Lin, P.-W., Chen, J.-A., Lee, Y.-T., & Chang, Y.-M. (2017). Exploiting Stretchable Metallic Springs as Compliant Electrodes for Cylindrical Dielectric Elastomer Actuators (DEAs). Micromachines, 8(11), 339. https://doi.org/10.3390/mi8110339