
Design and Implementation of a Bionic Mimosa Robot with Delicate Leaf Swing Behavior



Abstract
:
1. Introduction
2. Overall Design of the Mimosa Bionic Robot
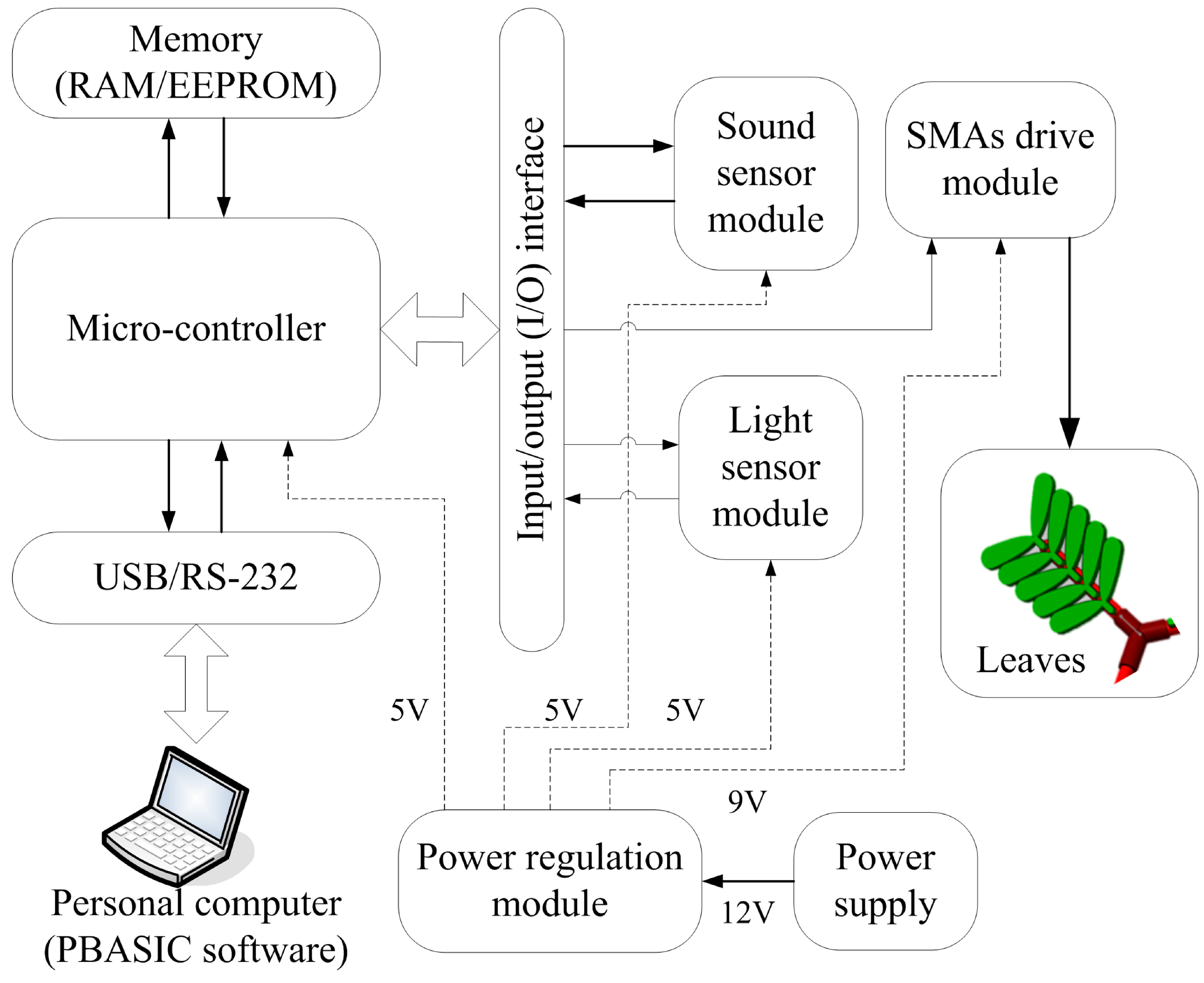
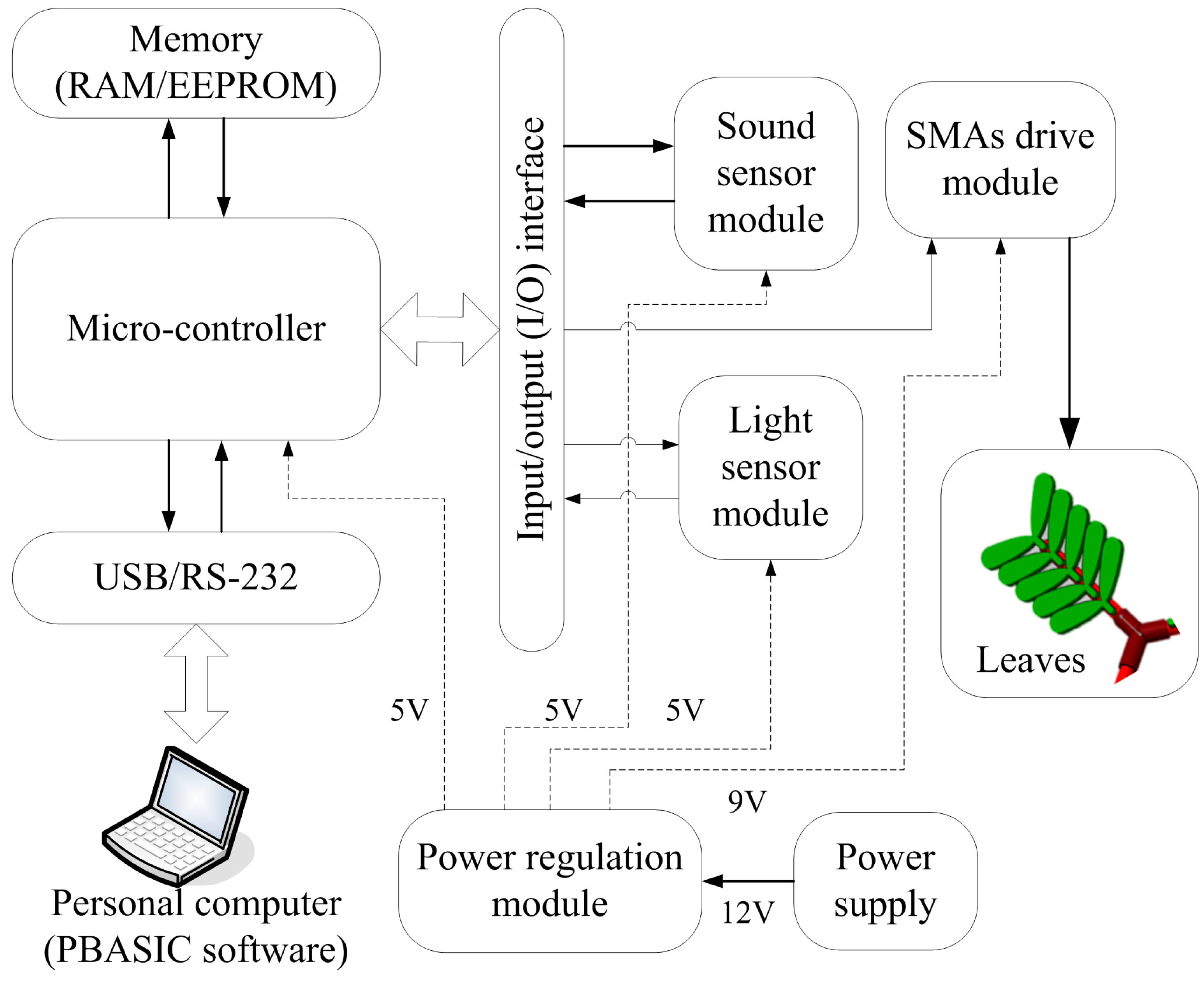
2.1. System Description
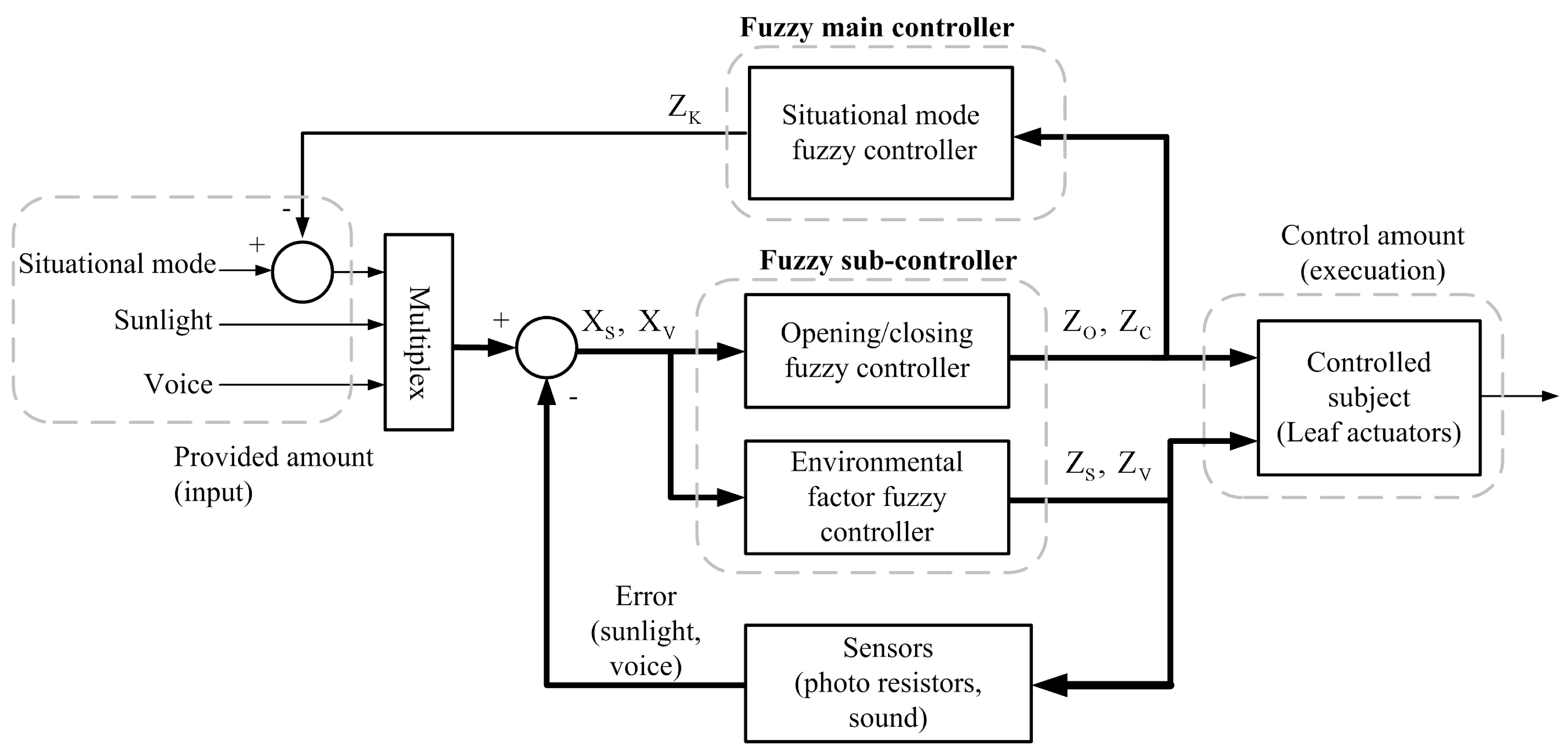
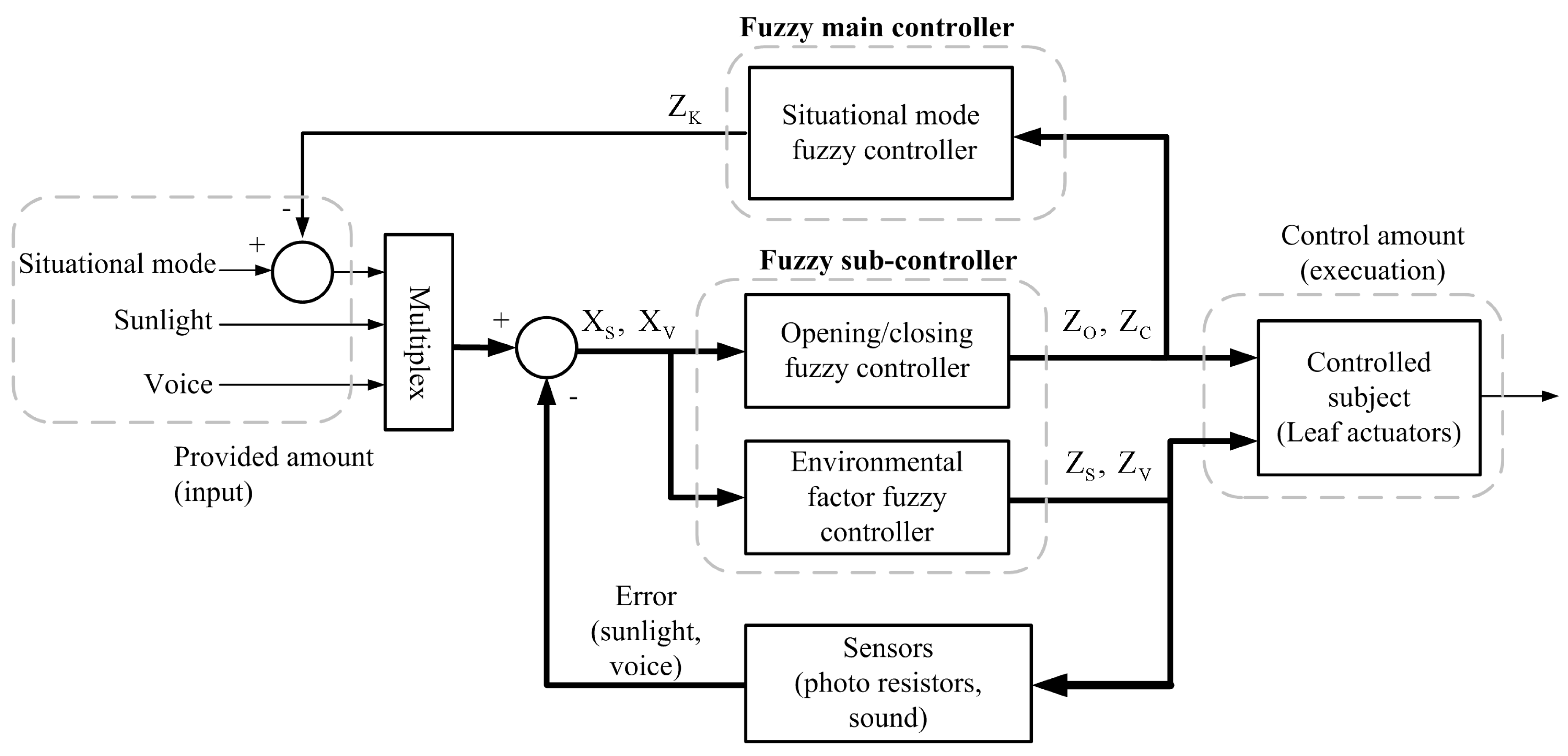
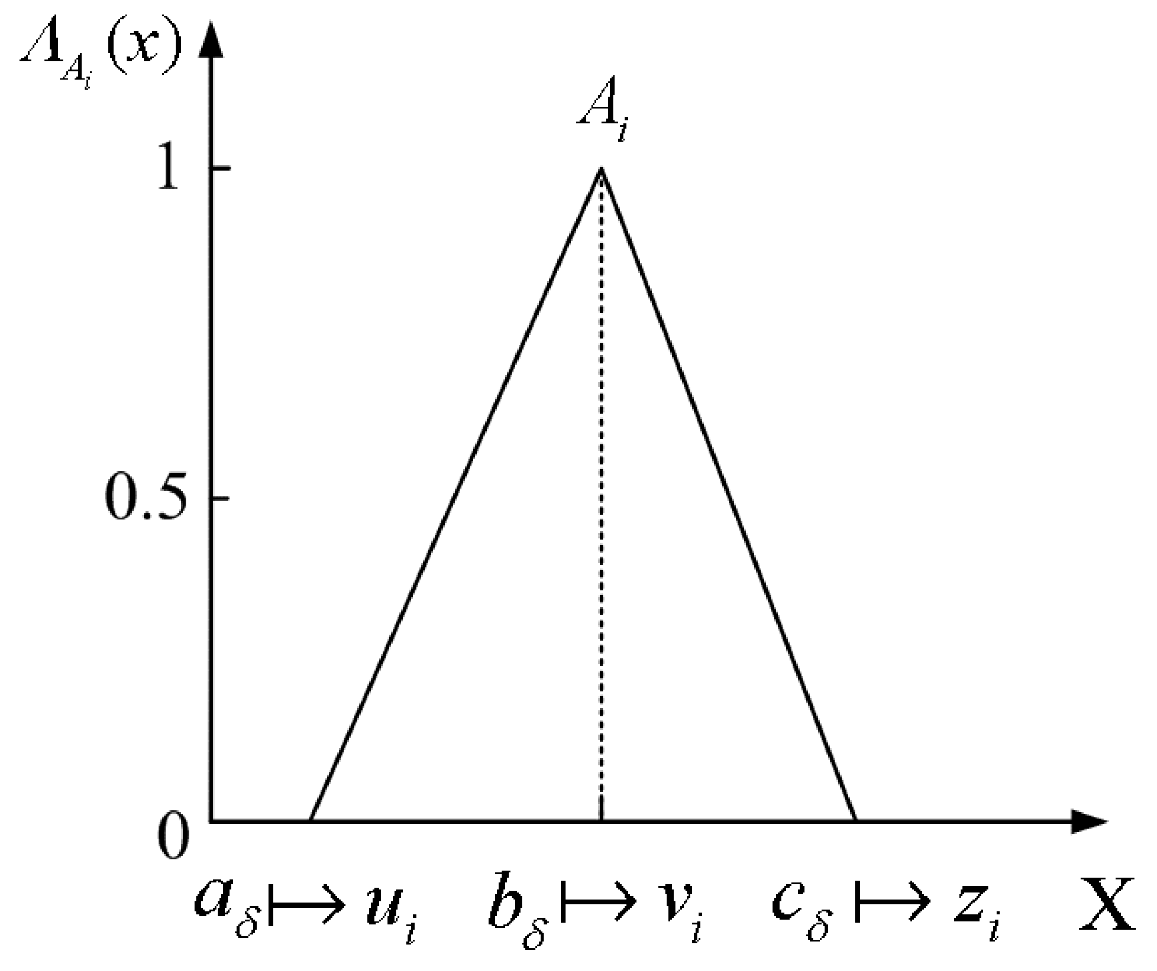
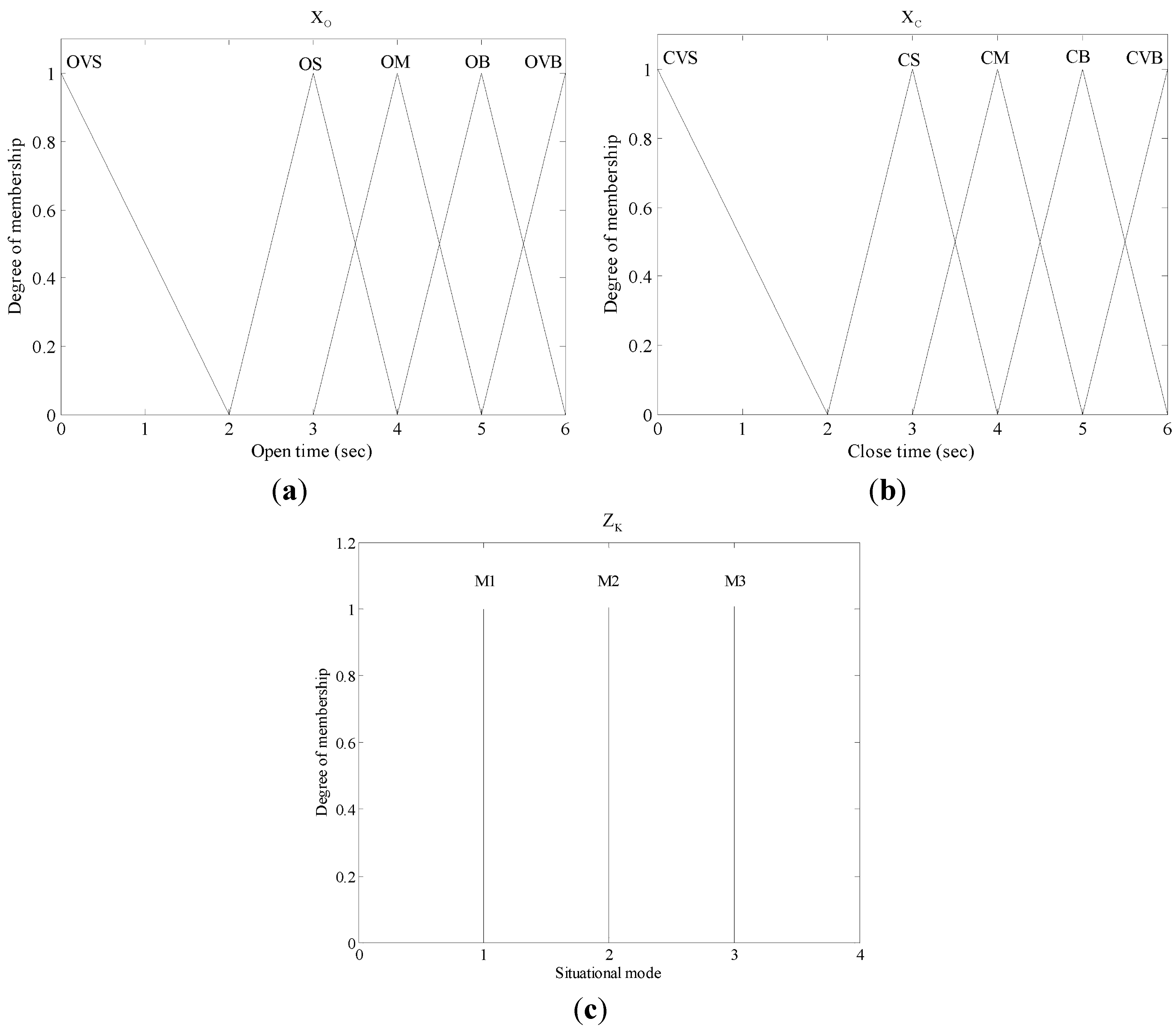
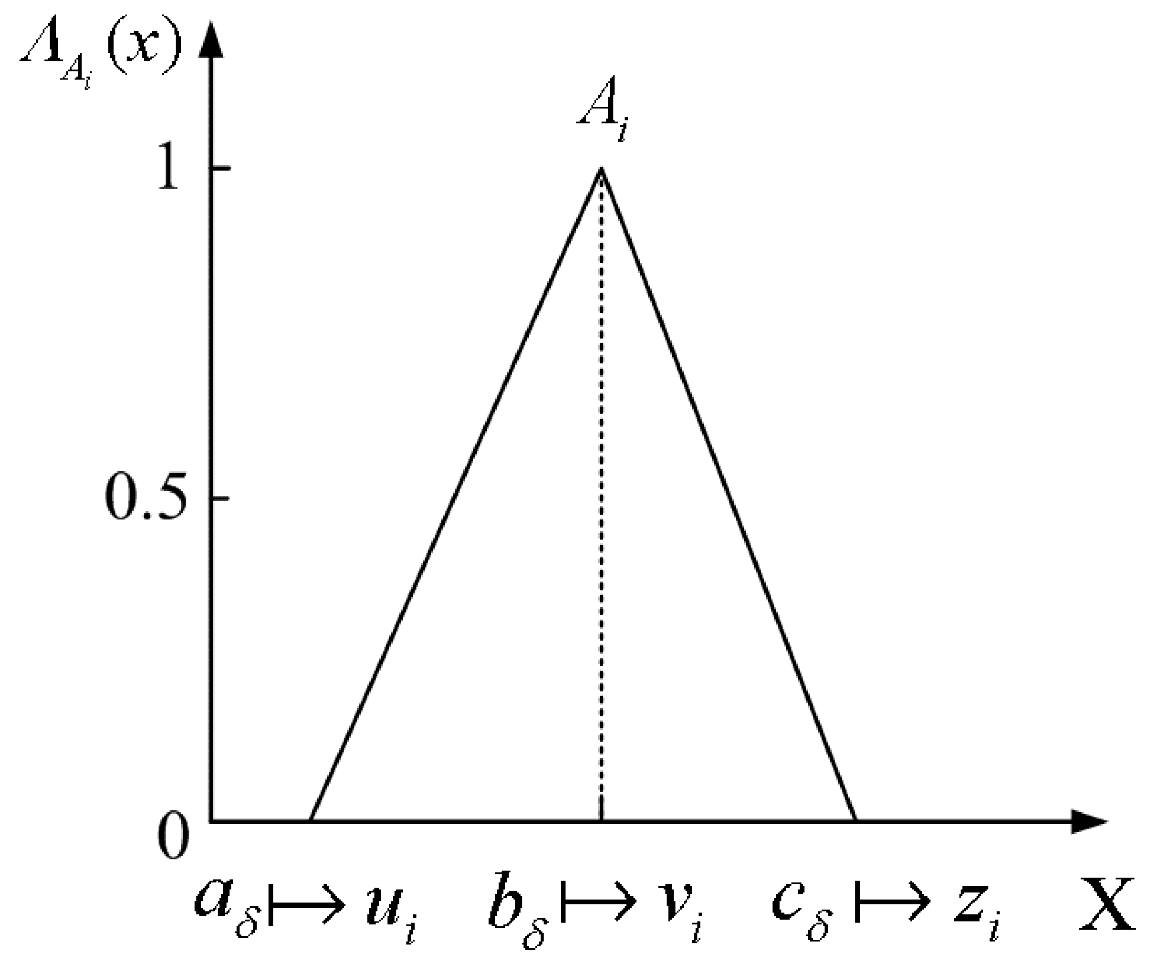
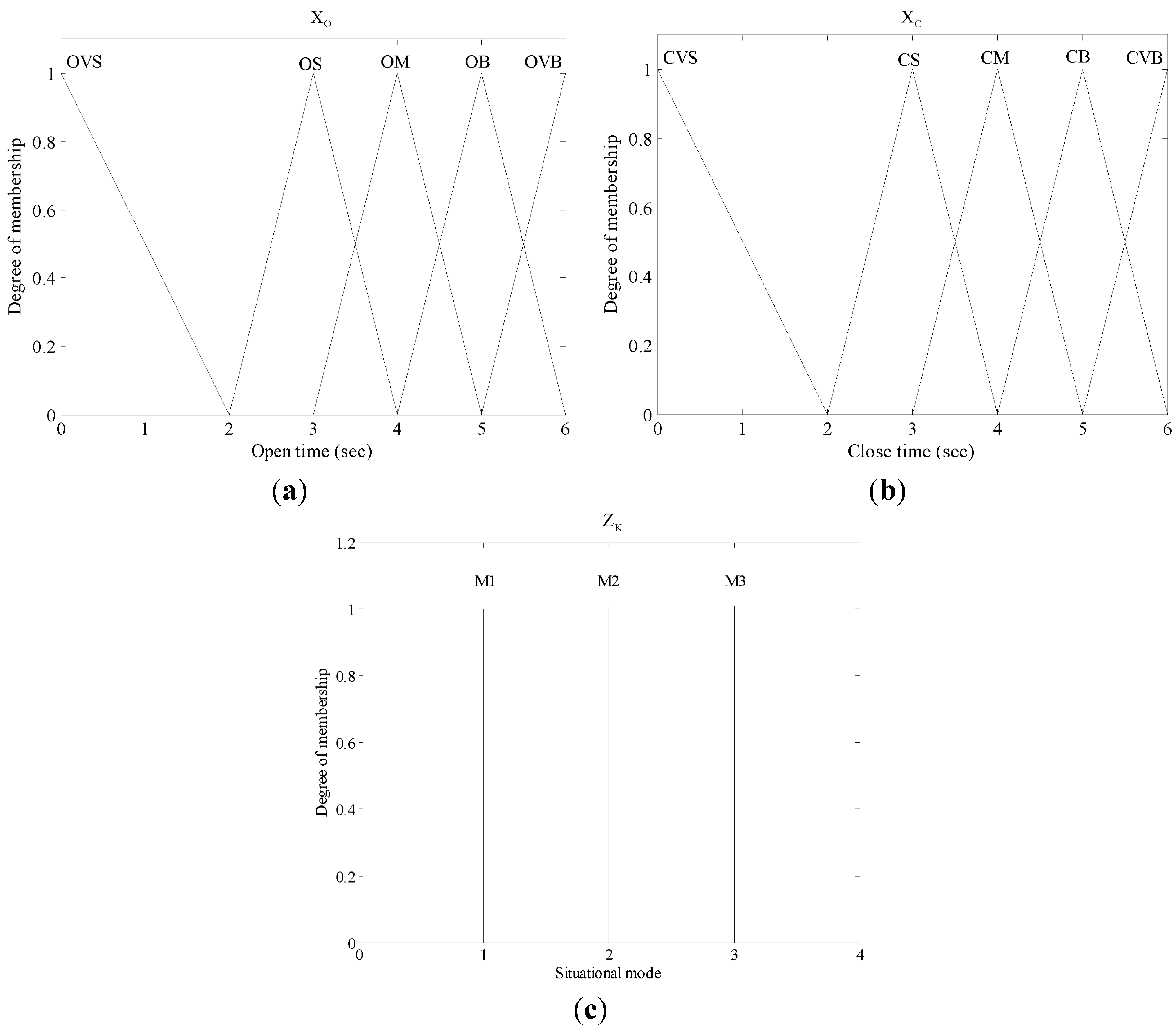
2.2. Fuzzy Control System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| XS | XV | ||
|---|---|---|---|
| (aS, bS, cS) | Linguistic Labels | (aV, bV, cV) | Linguistic Labels |
| (0, 30, 60) | SVS, SS, SM | (0,0.5,1) | VVS, VS, VM |
| (30, 60, 90) | SS, SM, SB | (0.5,1,1.5) | VS, VM, VB |
| (60, 90, 120) | SM, SB, SVB | (1,1.5, 2) | VM, VB, VVB |
| ZS | ZV | ZO | ZC | ||||
|---|---|---|---|---|---|---|---|
| (aS, bS, cS) | Linguistic Labels | (aV, bV, cV) | Linguistic Labels | (aO, bO, cO) | Linguistic Labels | (aC, bC, cC) | Linguistic Labels |
| (0, 30, 60) | SVS, SS, SM | (0, 0.5, 1) | VVS, VS, VM | (2, 3, 4) | OVS, OS, OM | (2, 3, 4) | CVS, CS, CM |
| (30, 60, 90) | SS, SM, SB | (0.5, 1, 1.5) | VS, VM, VB | (3, 4, 5) | OS, OM, OB | (3, 4, 5) | CS, CM, CB |
| (60, 90, 120) | SM, SB, SVB | (1, 1.5, 2) | VM, VB, VVB | (4, 5, 6) | OM, OB, OVB | (4, 5, 6) | CM, CB, CVB |
| ZM | Xo | |||||
|---|---|---|---|---|---|---|
| OVS | OS | OM | OB | OVB | ||
| Xc | CVS | M1 | M1 | M1 | M1 | M2 |
| CS | M1 | M1 | M2 | M2 | M2 | |
| CM | M2 | M2 | M2 | M2 | M3 | |
| CB | M2 | M2 | M2 | M3 | M3 | |
| CVB | M3 | M3 | M3 | M3 | M3 | |
| ZO, ZC | XS | |||||
|---|---|---|---|---|---|---|
| SVS | SS | SM | SB | SVB | ||
| XV | VVS | OVS, CVB | OVS, CVB | OS, CB | OM, CB | OM, CB |
| VS | OVS, CB | OS, CB | OS, CM | OM, CM | OM, CM | |
| VM | OS, CB | OM, CM | OM, CM | OM, CM | OB, CS | |
| VB | OM, CM | OM, CM | OM, CS | OB, CS | OB, CVS | |
| VVB | OB, CM | OB, CM | OB, CS | OVB, CVS | OVB, CVS | |
| ZS, ZV | Xs | |||||
|---|---|---|---|---|---|---|
| SVS | SS | SM | SB | SVB | ||
| Xv | VVS | SM, VB | SB, VM | SVB, VVB | SVB, VM | SVB, VS |
| VS | SVS, VS | SS, VM | SB, VB | SVB, VVB | SVB, VVB | |
| VM | SVB, VM | SB, VM | SM, VM | SS, VM | SVS, VM | |
| VB | SVS, VVS | SVS, VS | SS, VS | SM, VM | SB, VB | |
| VVB | SVS, VB | SVS, VM | SVS, VVS | SS, VM | SM, VS | |
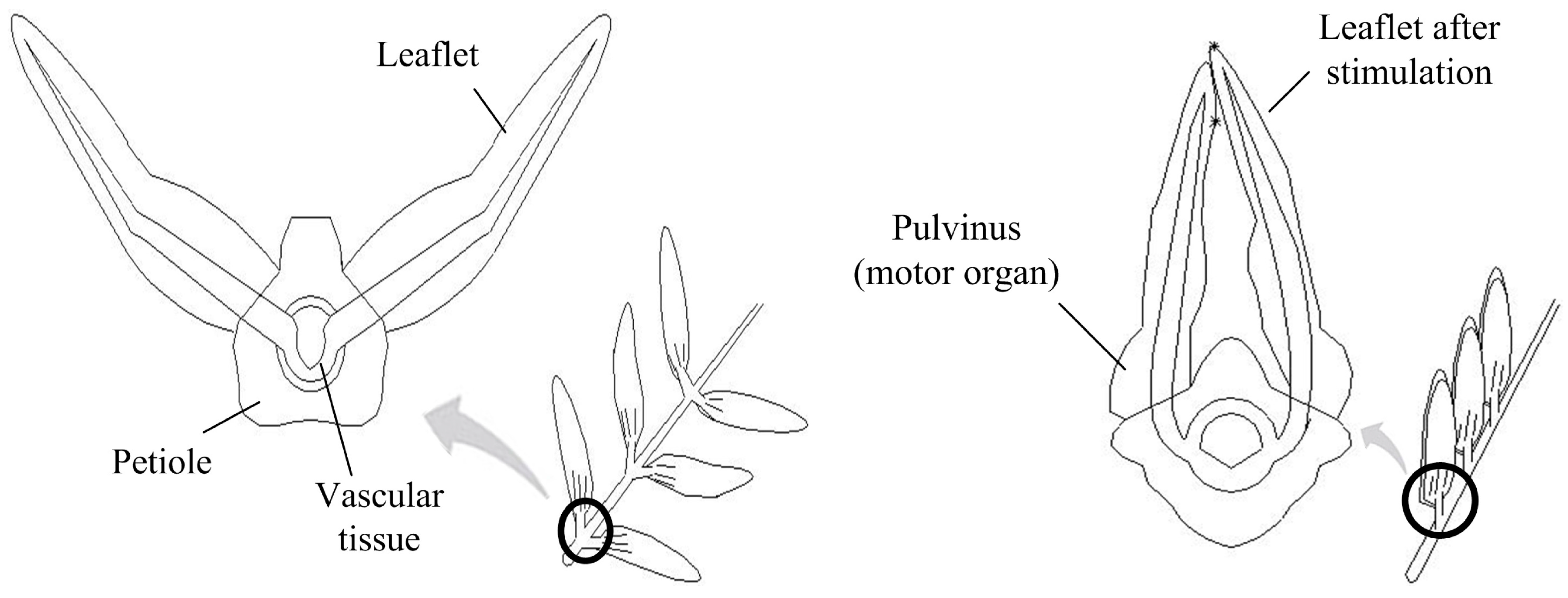
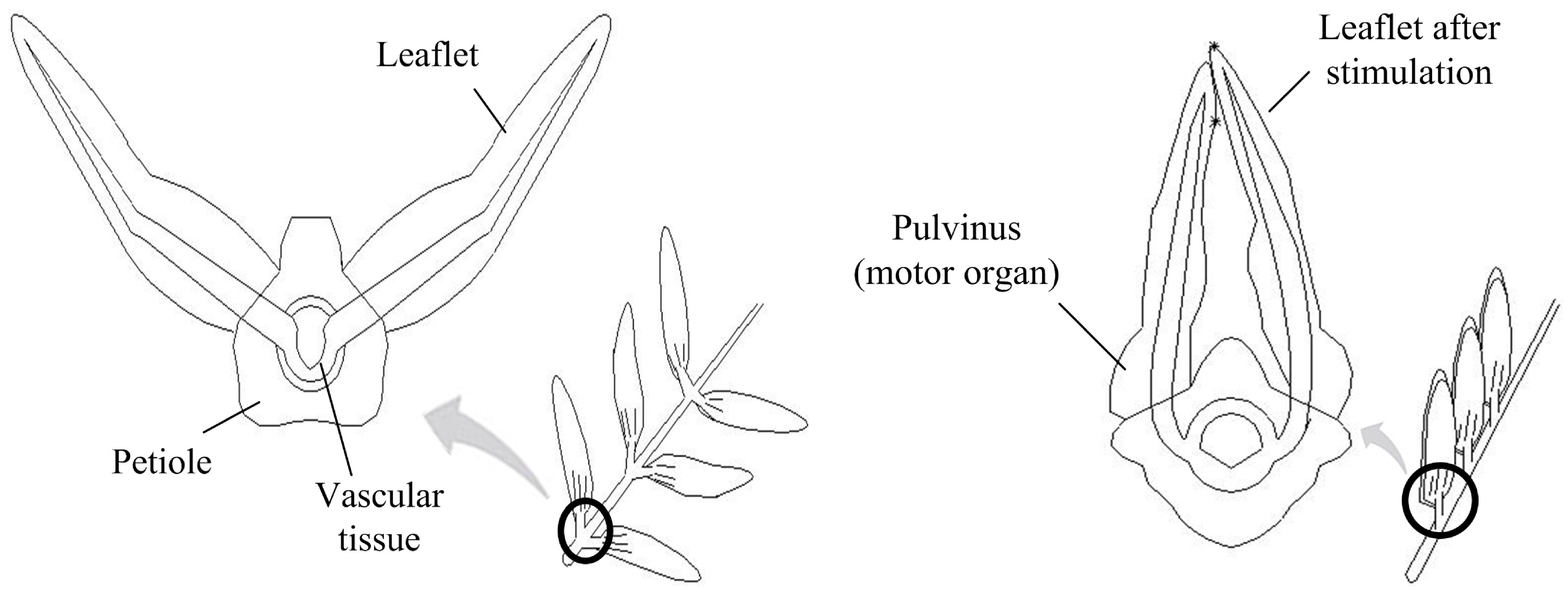
2.3. Leaf and Vein Design
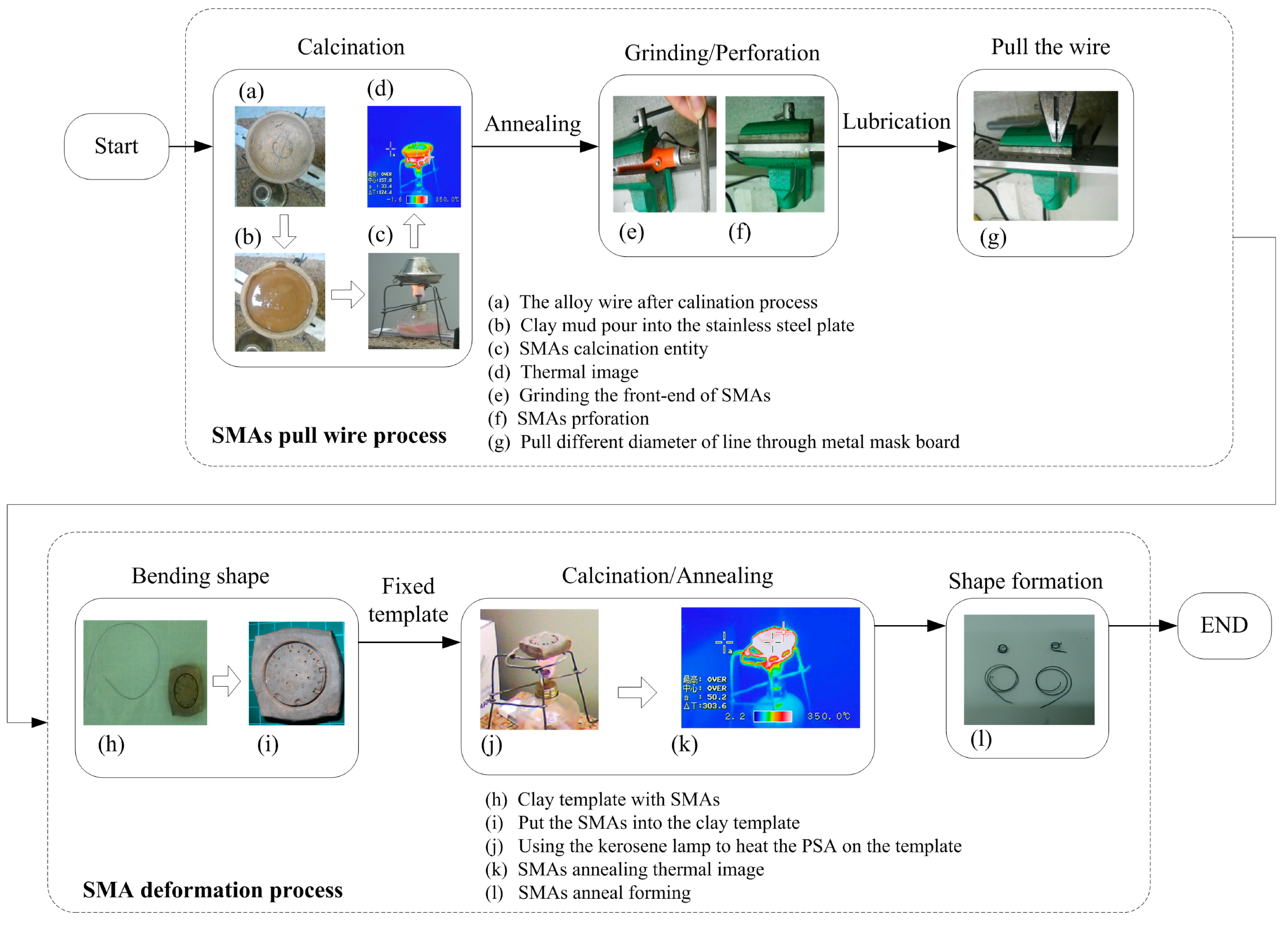
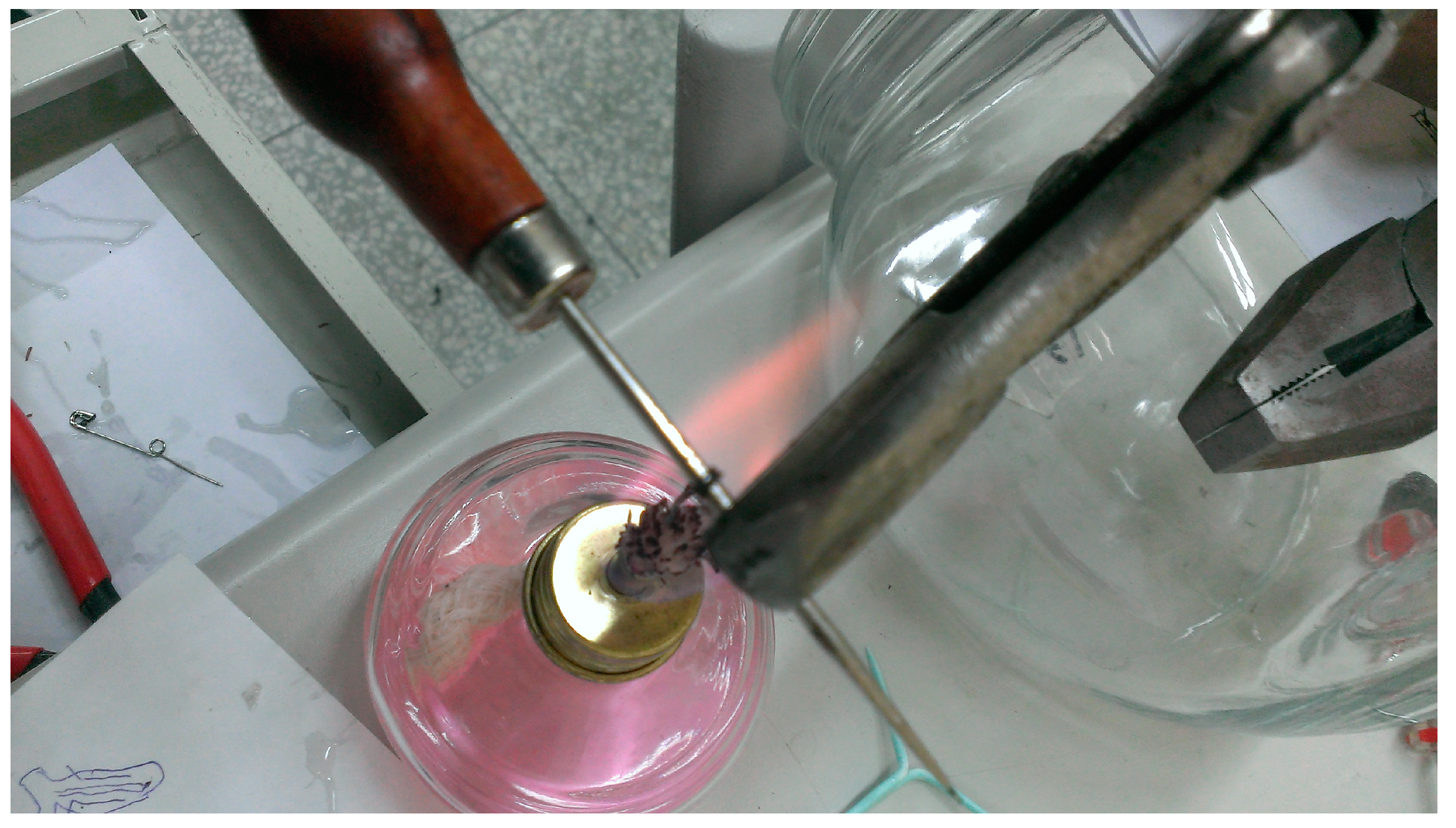
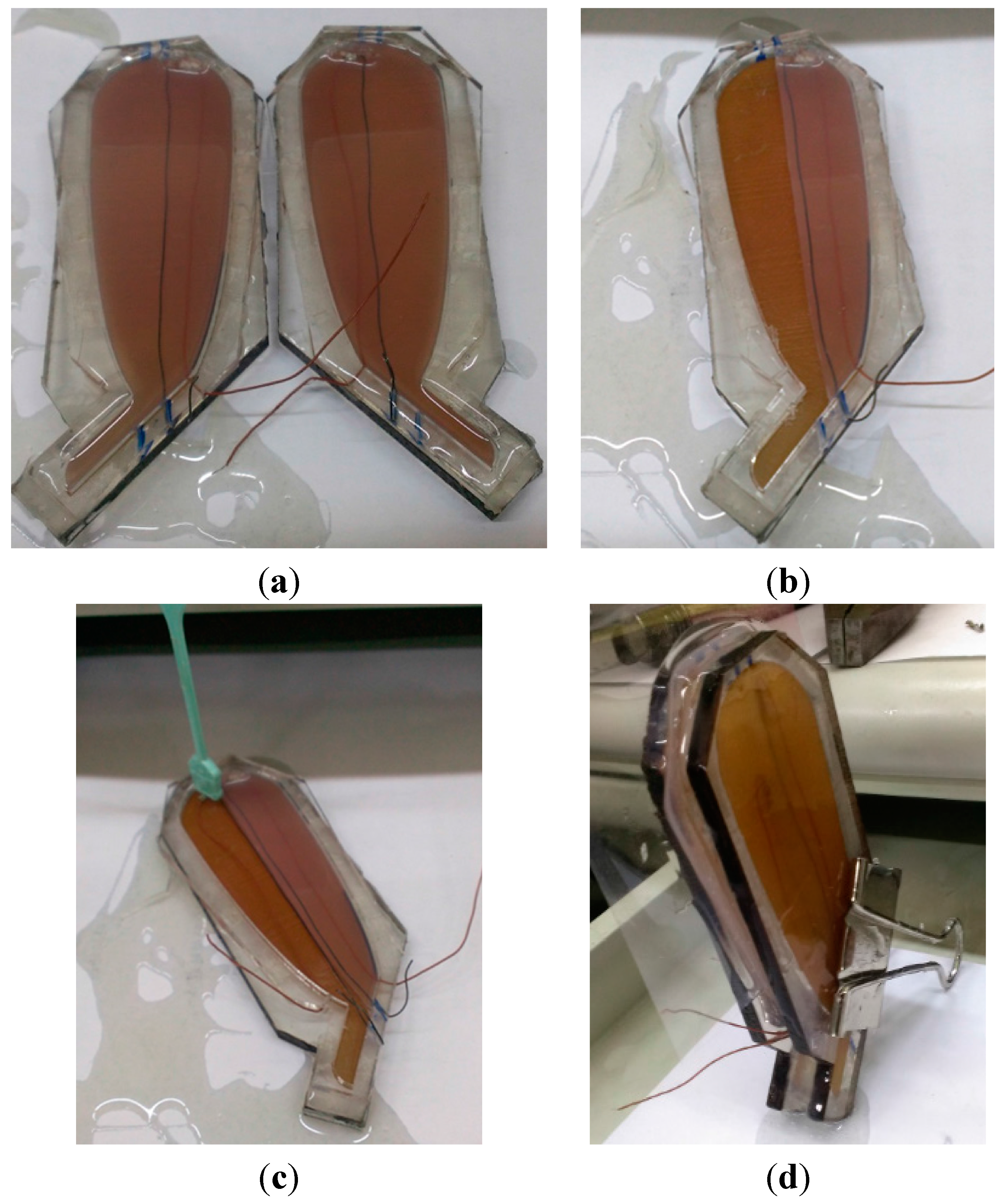
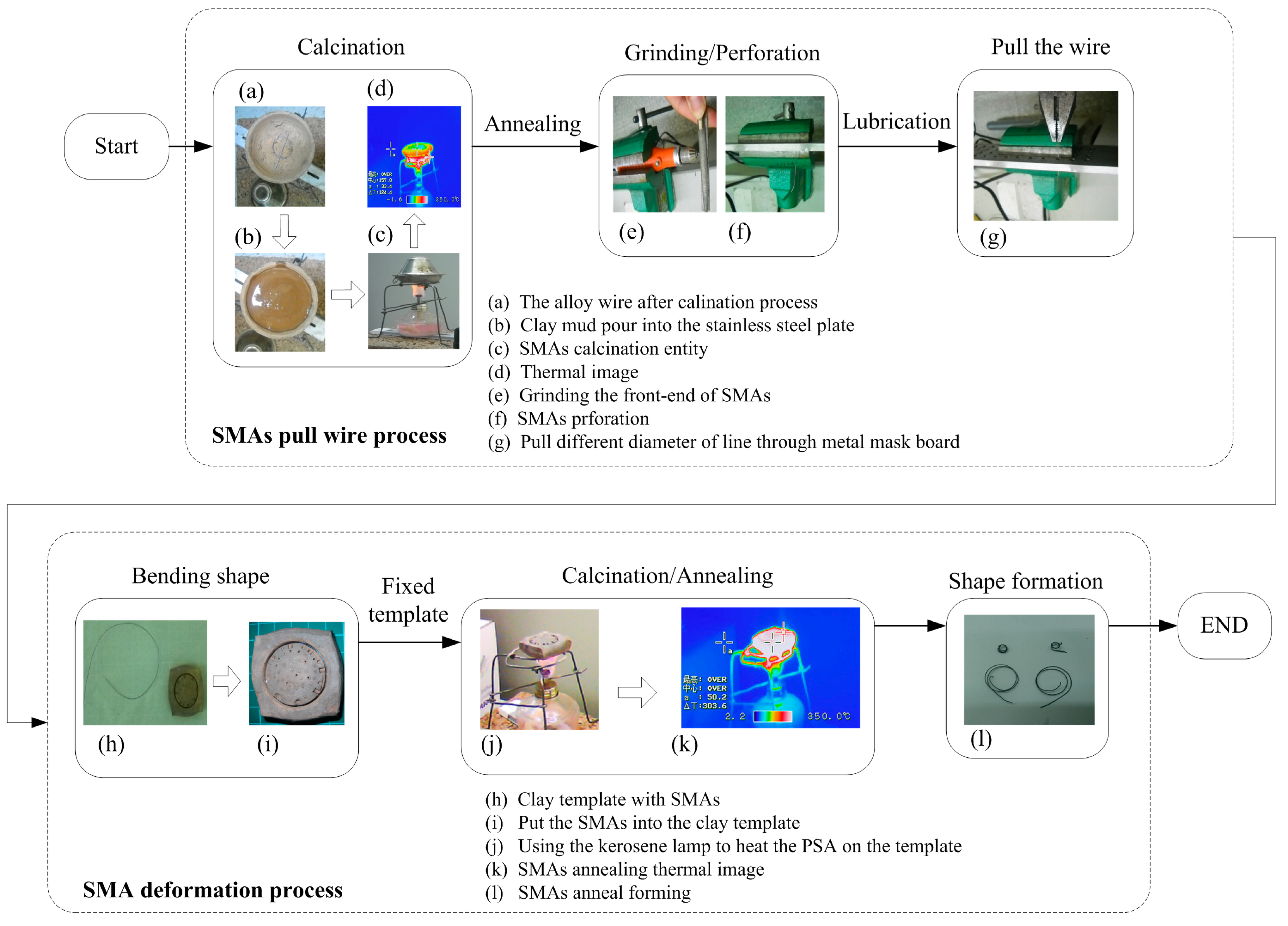
2.3.1. SMAs Processing and Memory
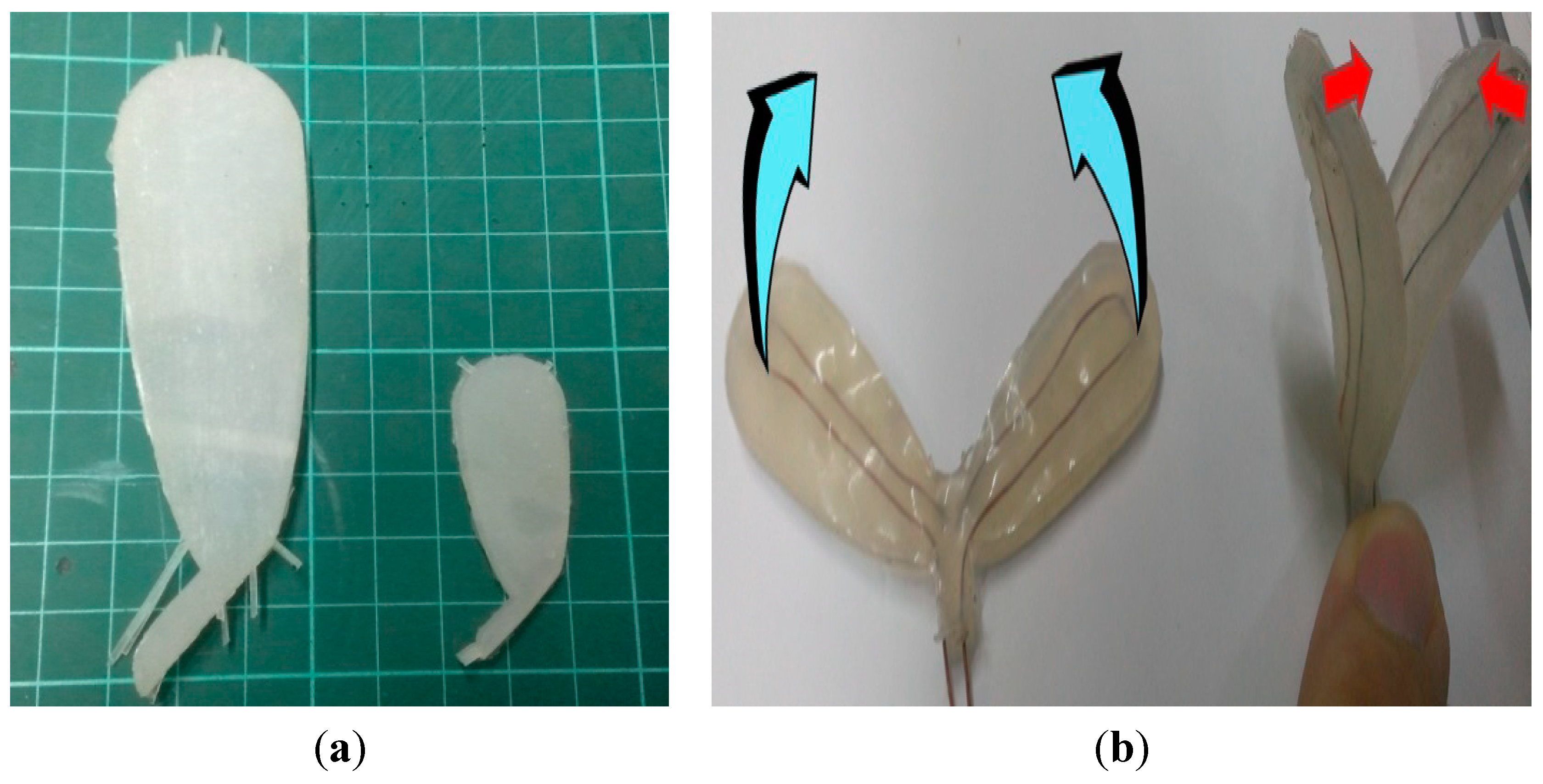
2.3.2. Leaf and Vein Design and Implementation

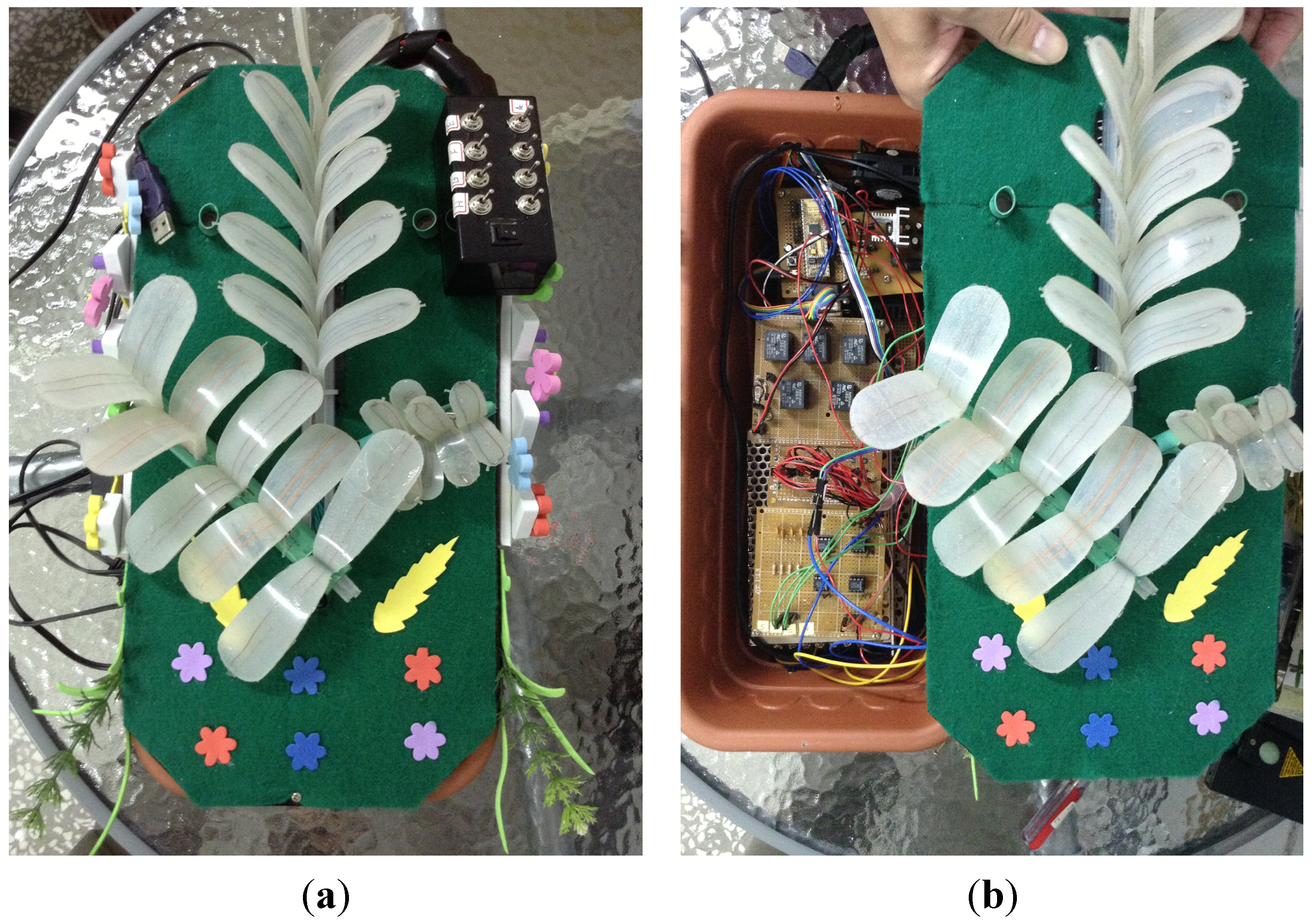
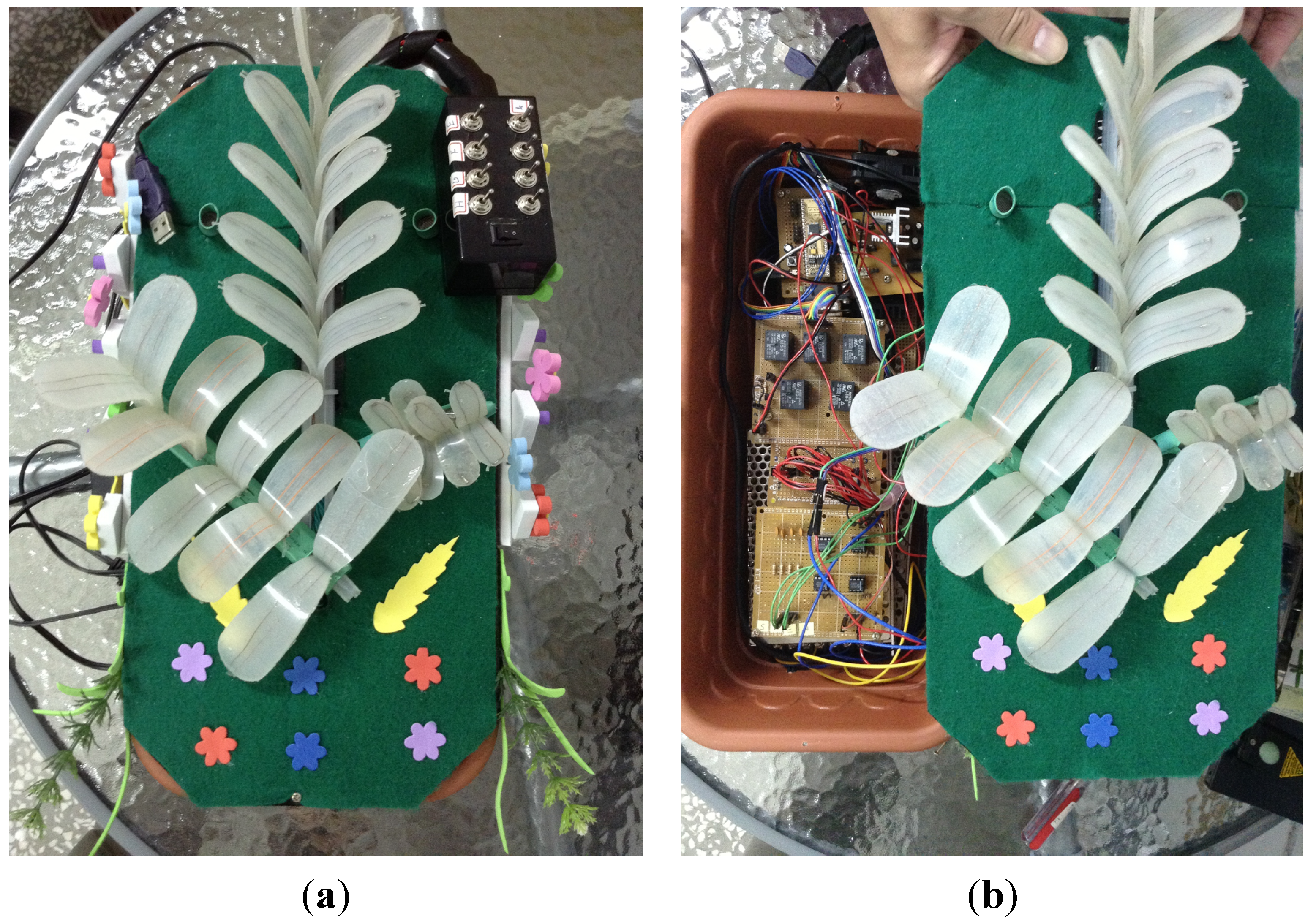
2.4. Control System Implementation
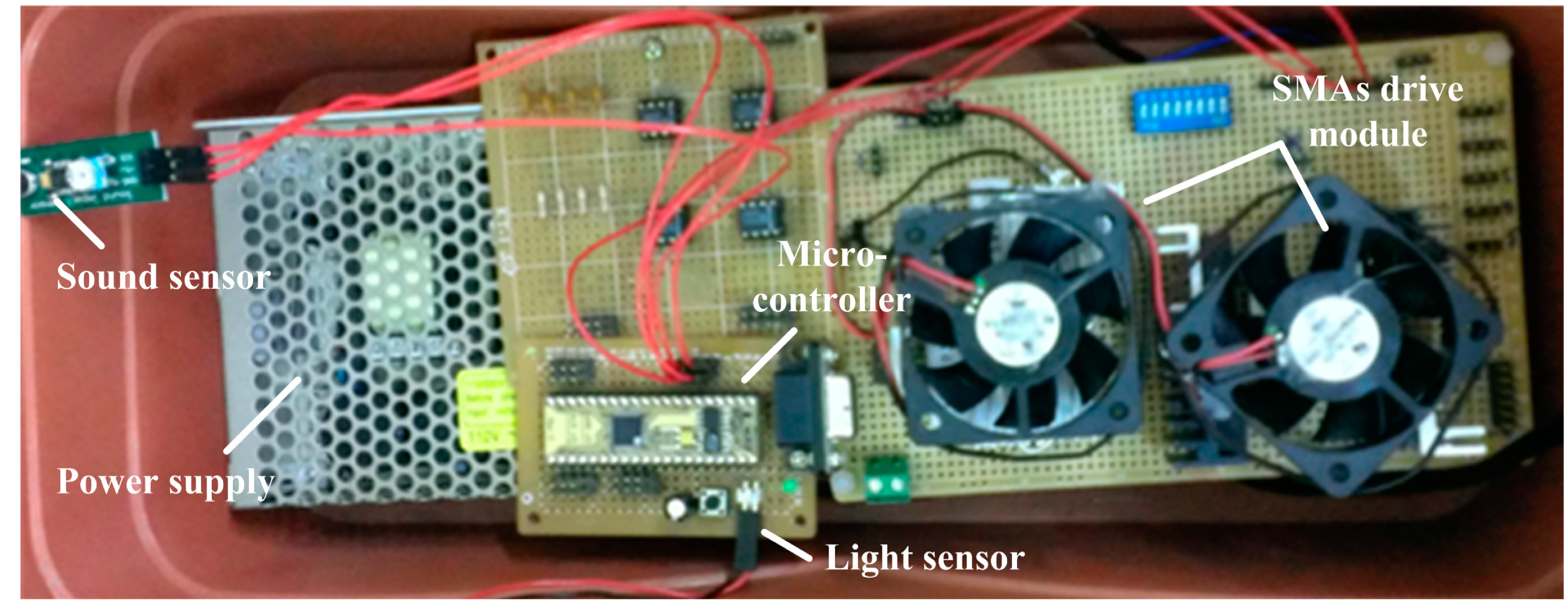
2.4.1. Hardware Circuit Design
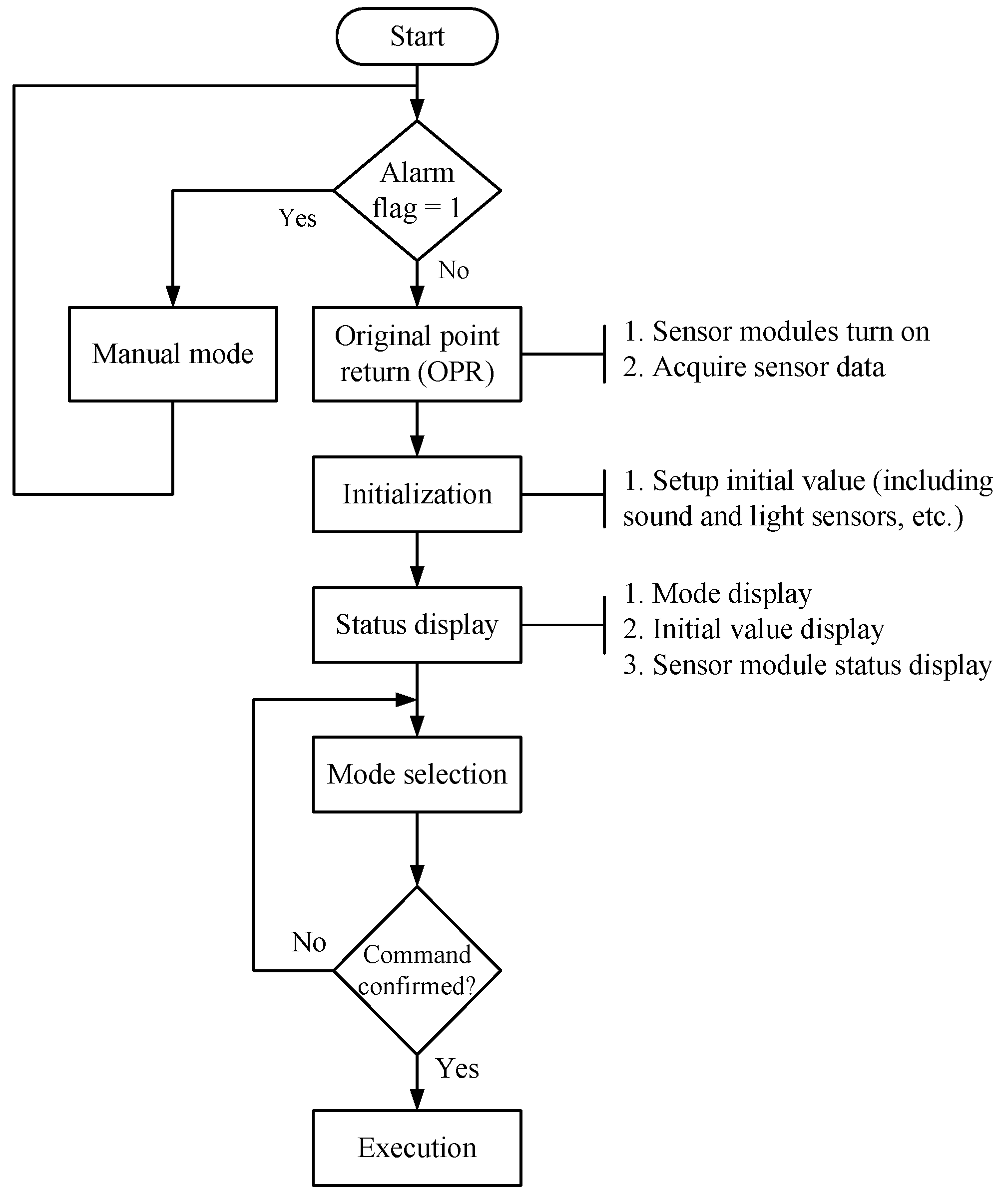
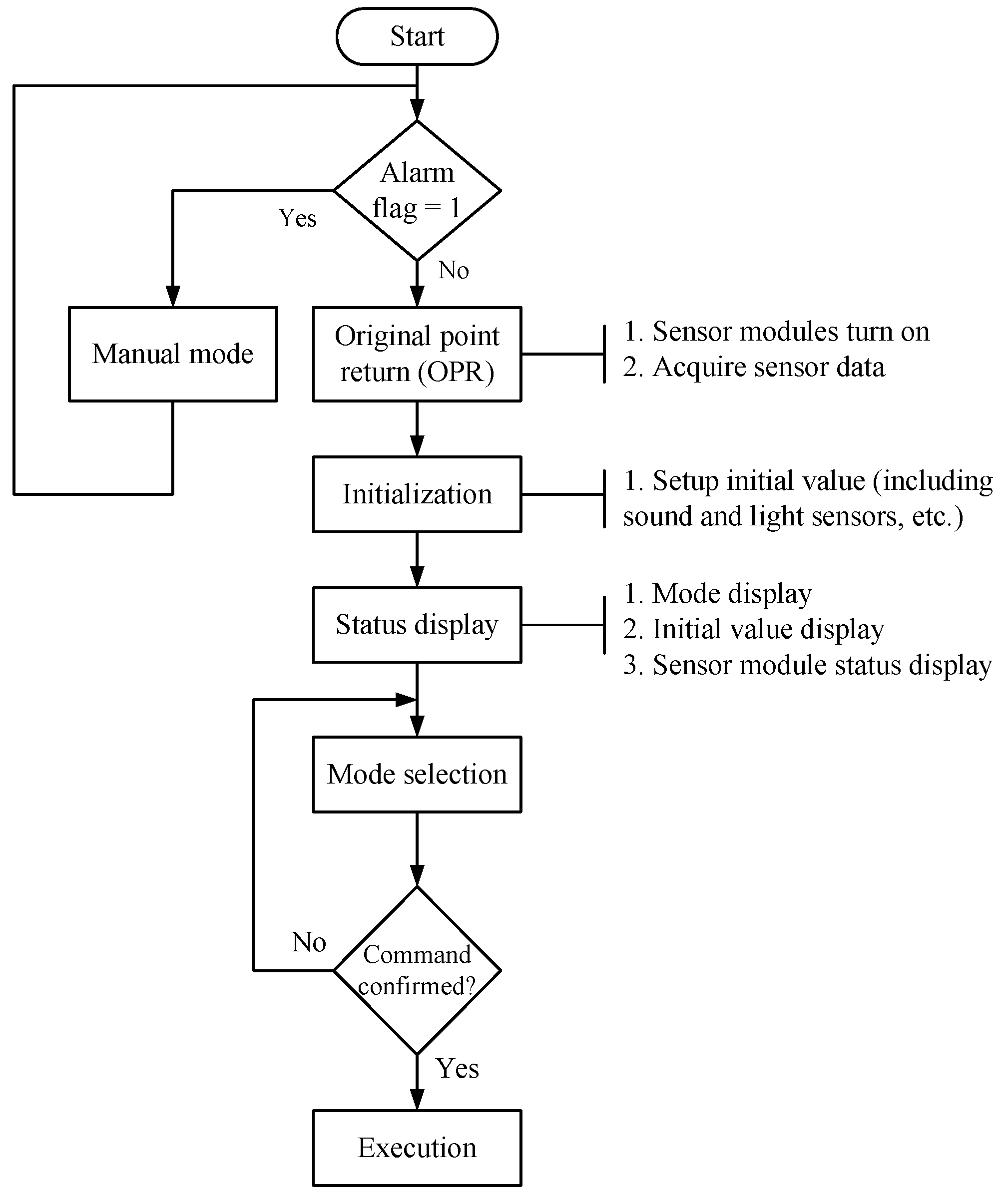
2.4.2. Software Programming Design
3. Results and Discussion
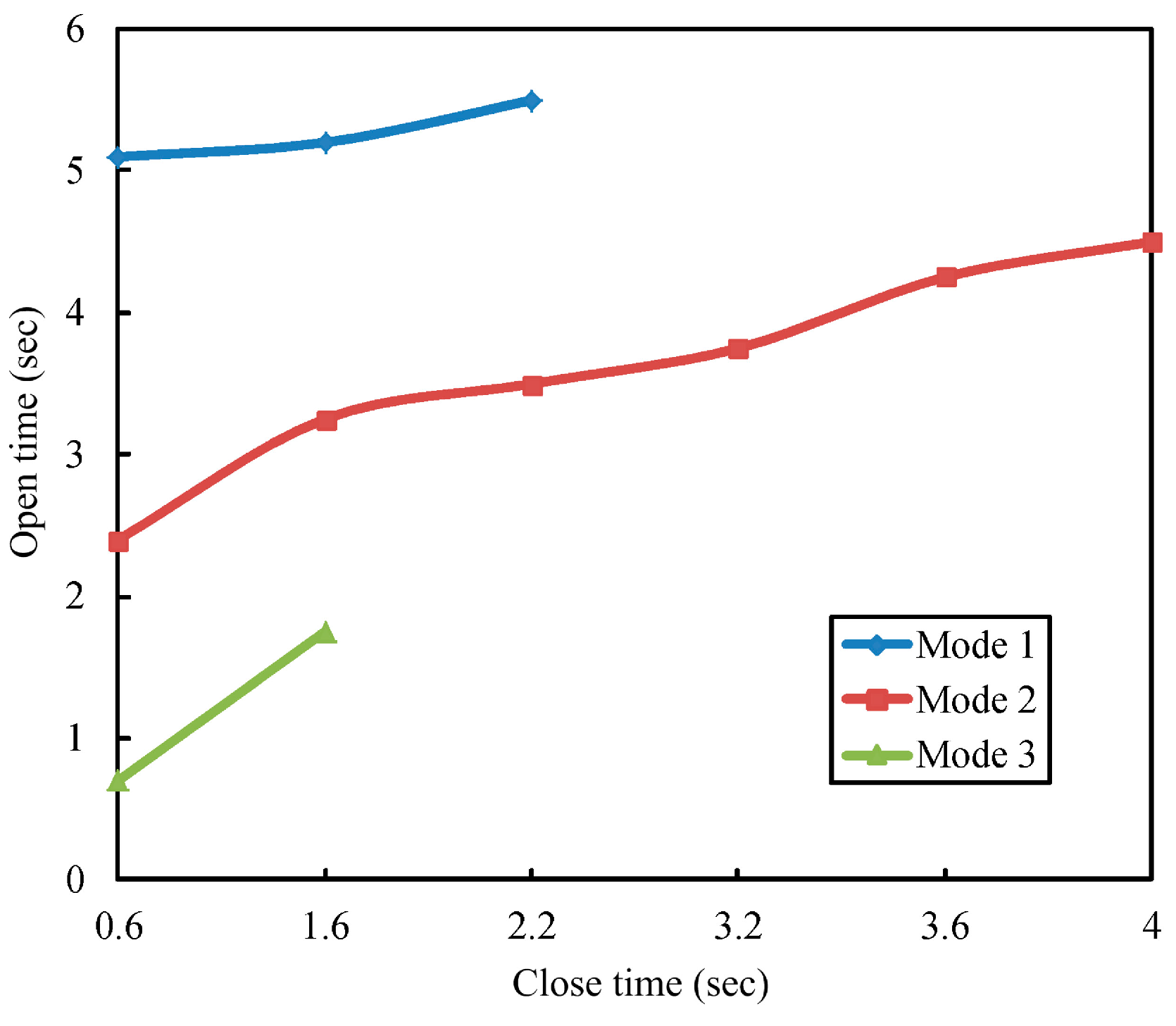
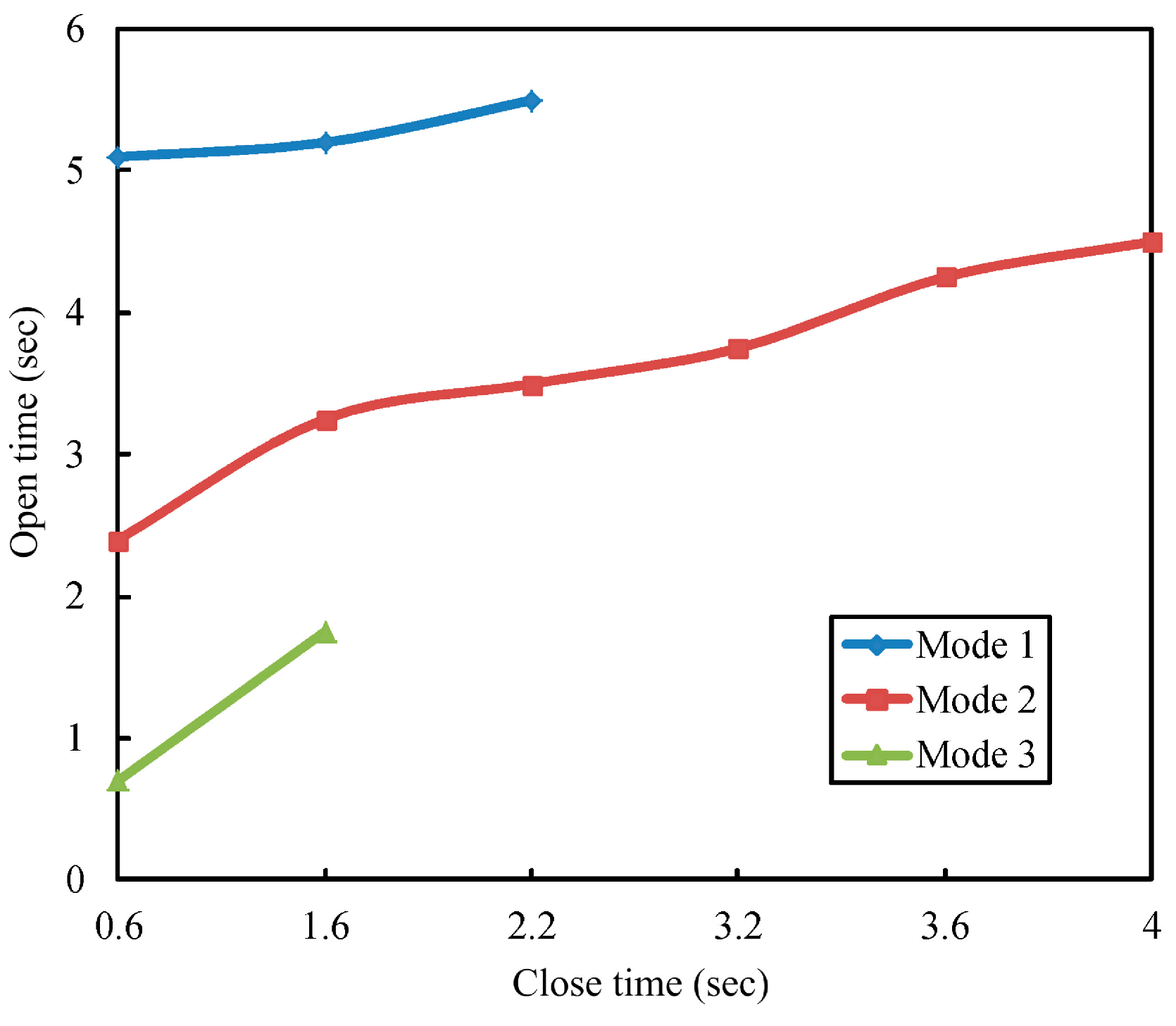
3.1. Behavior Mode Simulation and Verification
3.2. System Test
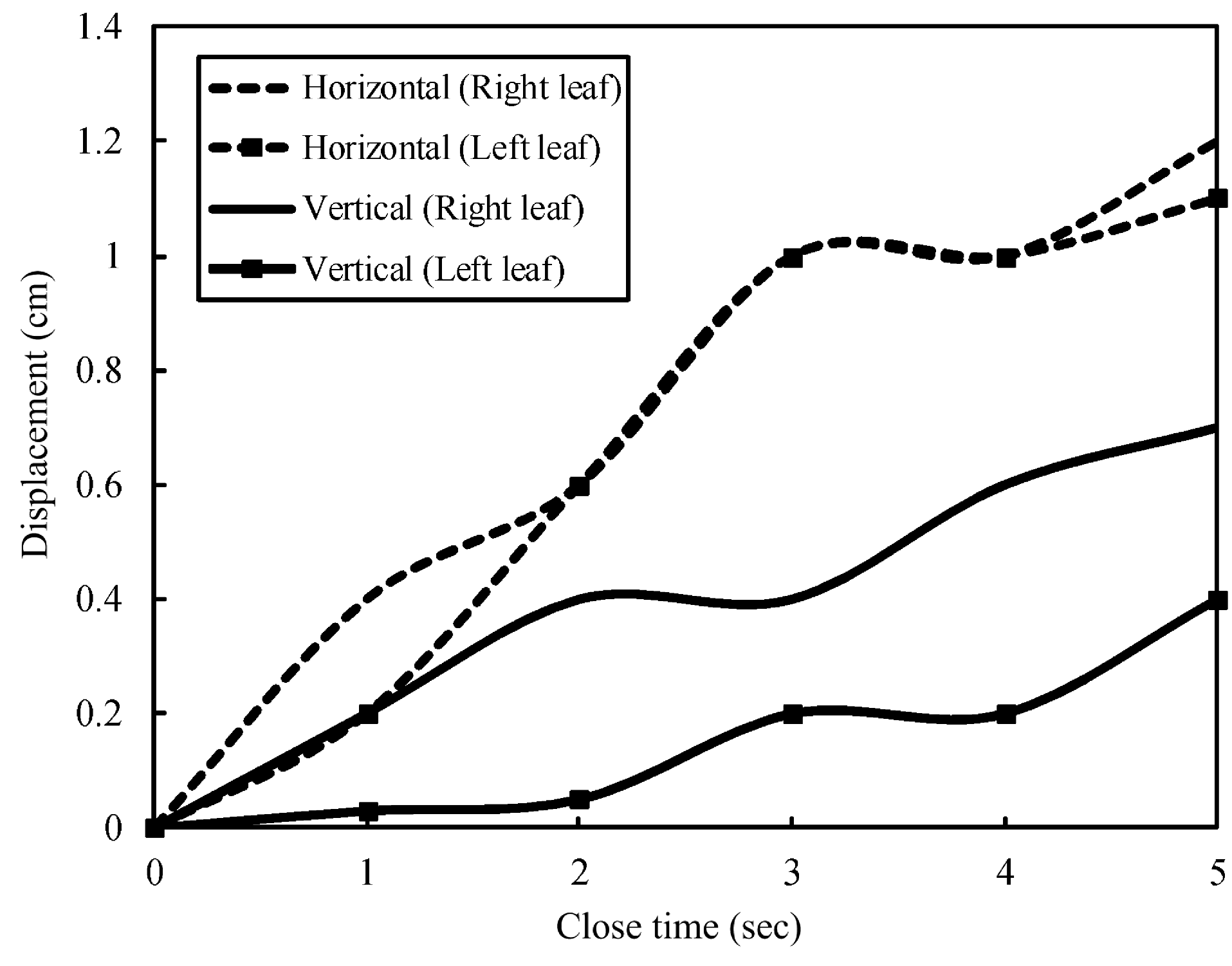
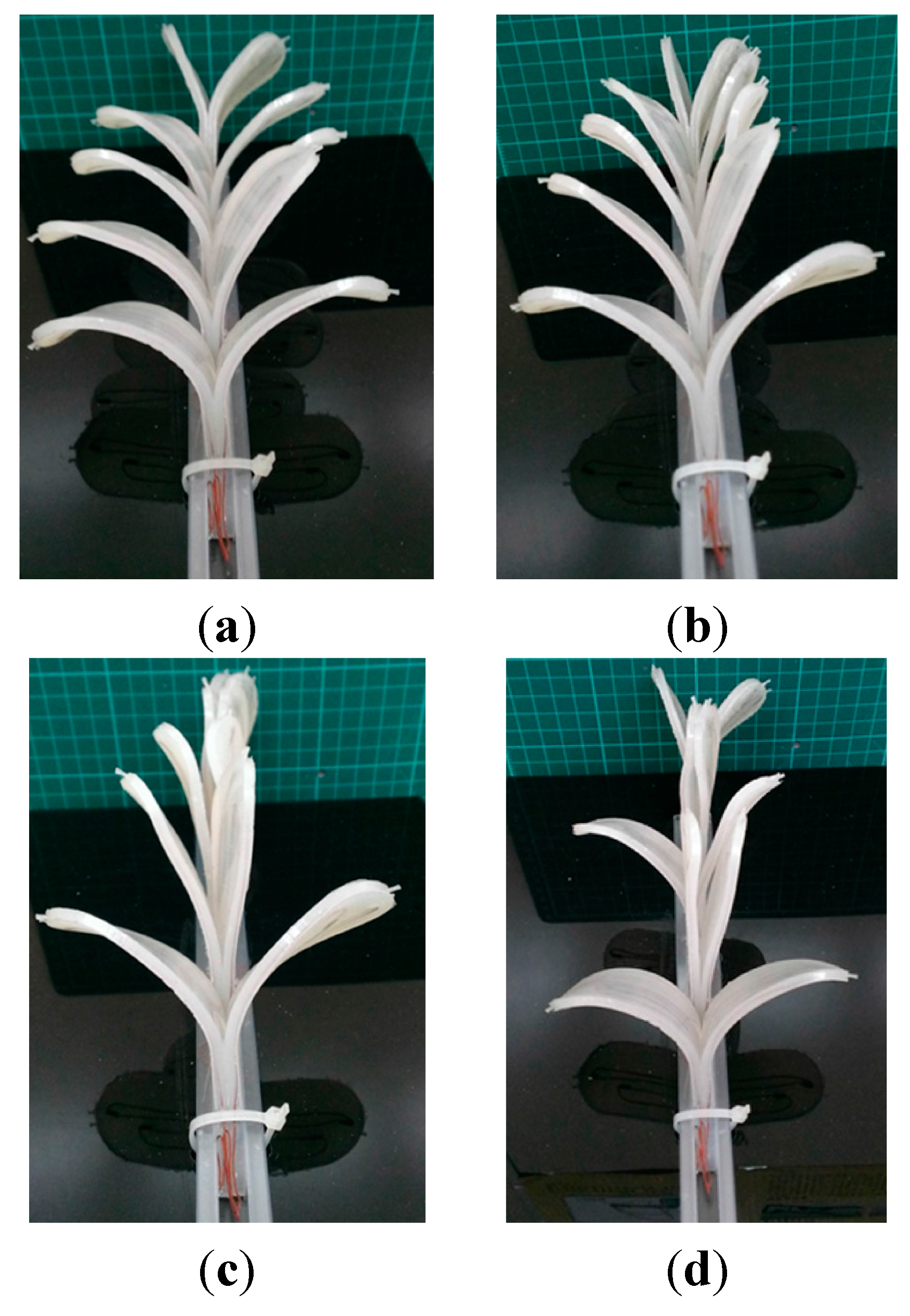
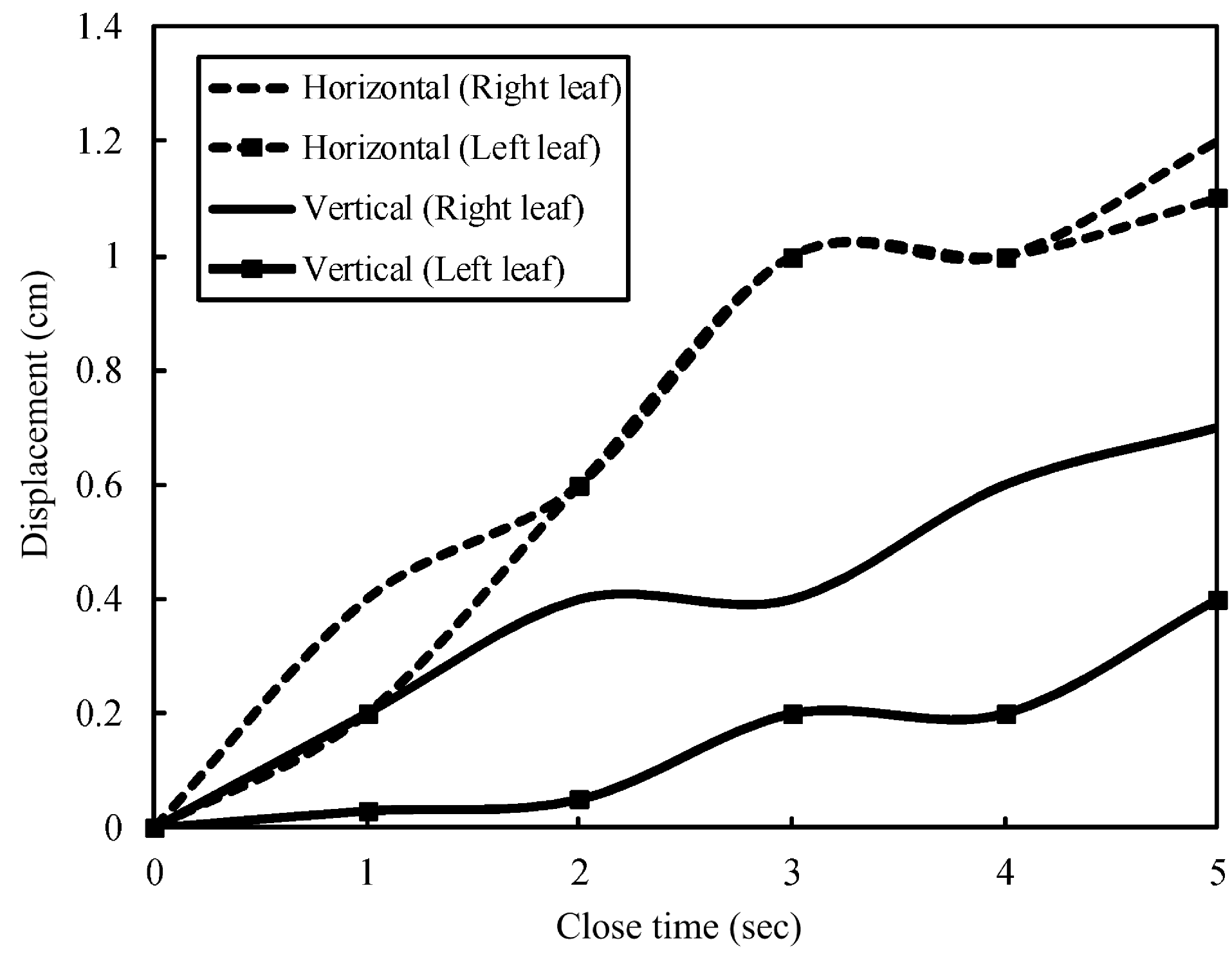
3.2.1. Single-Pair Leaf Swinging
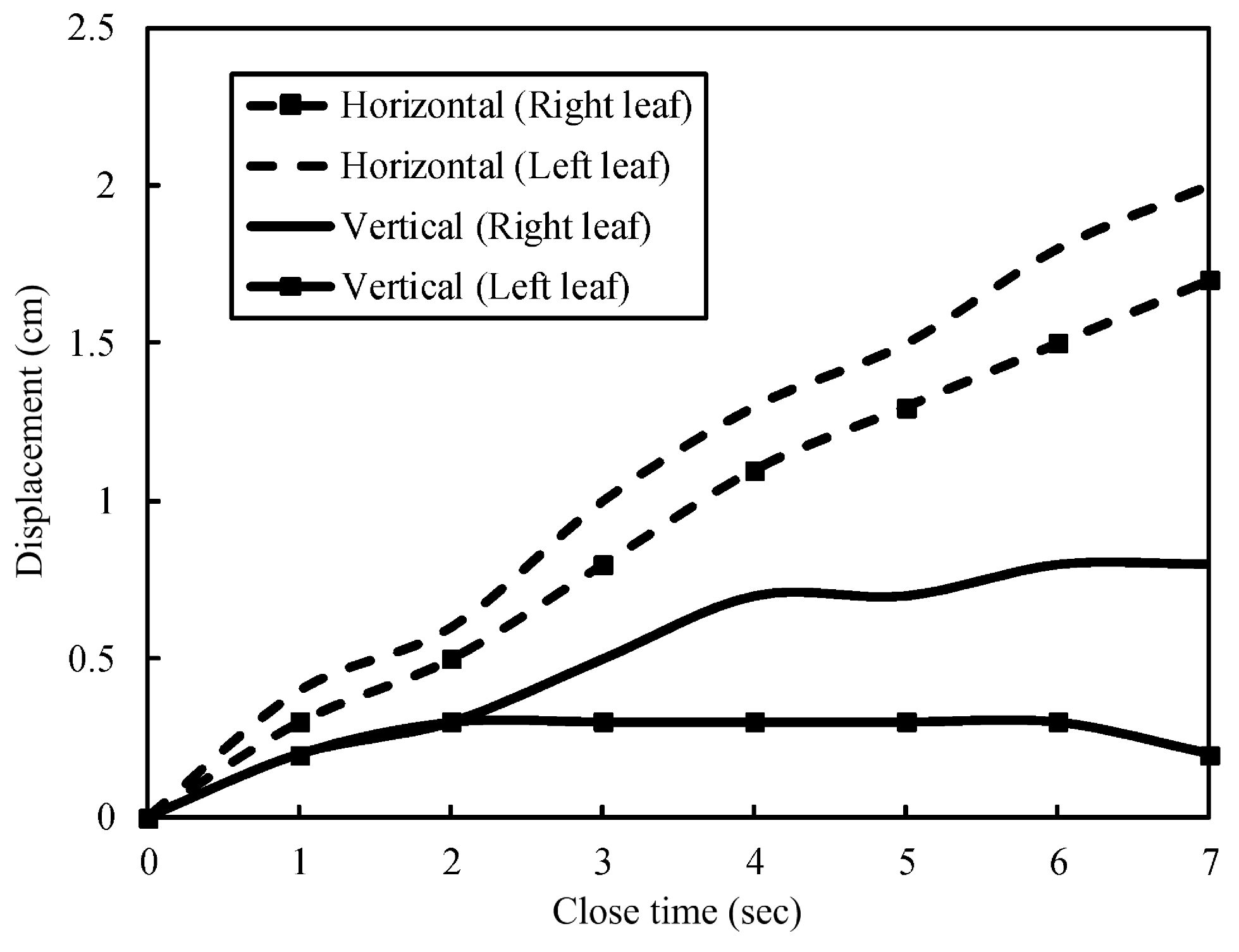
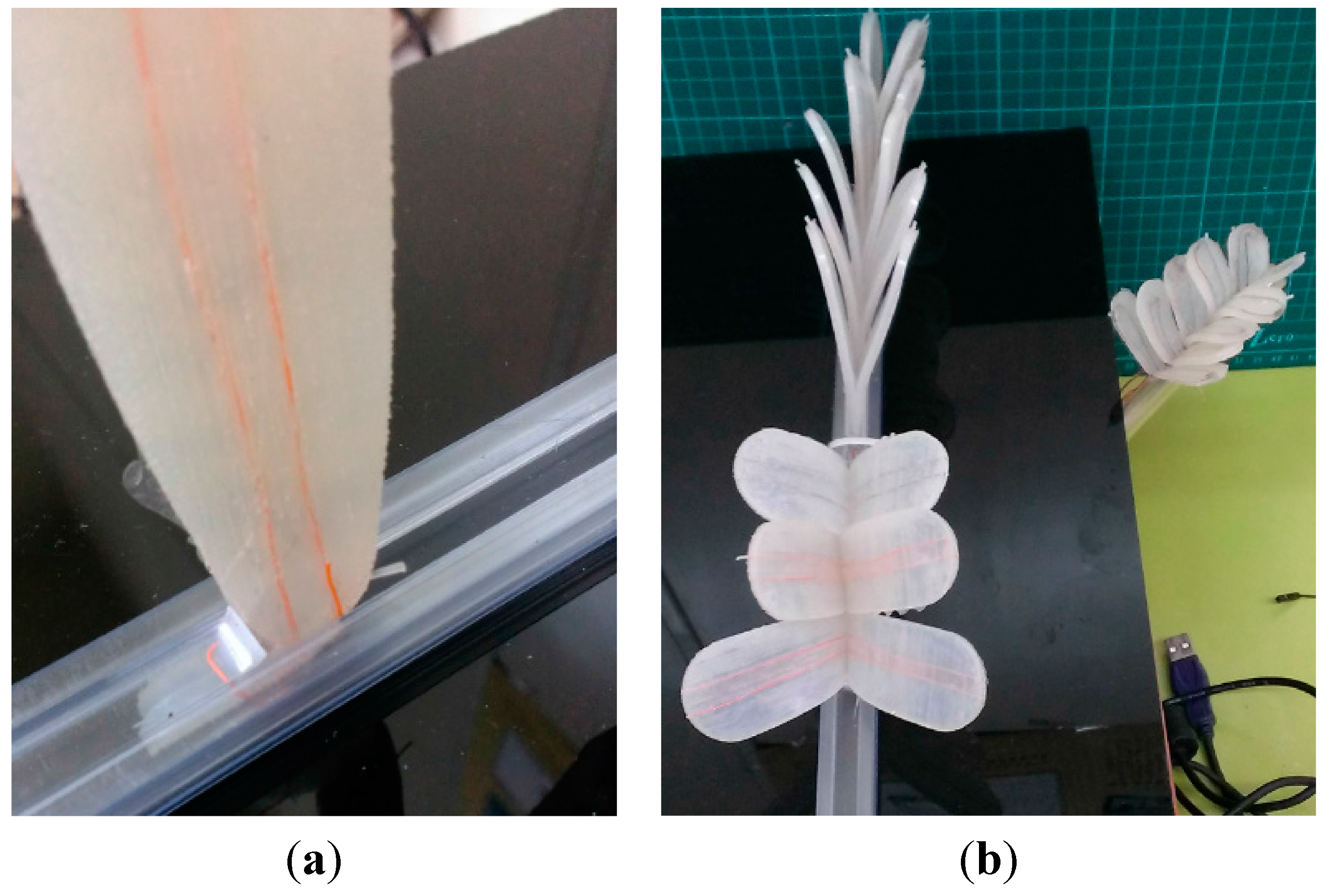
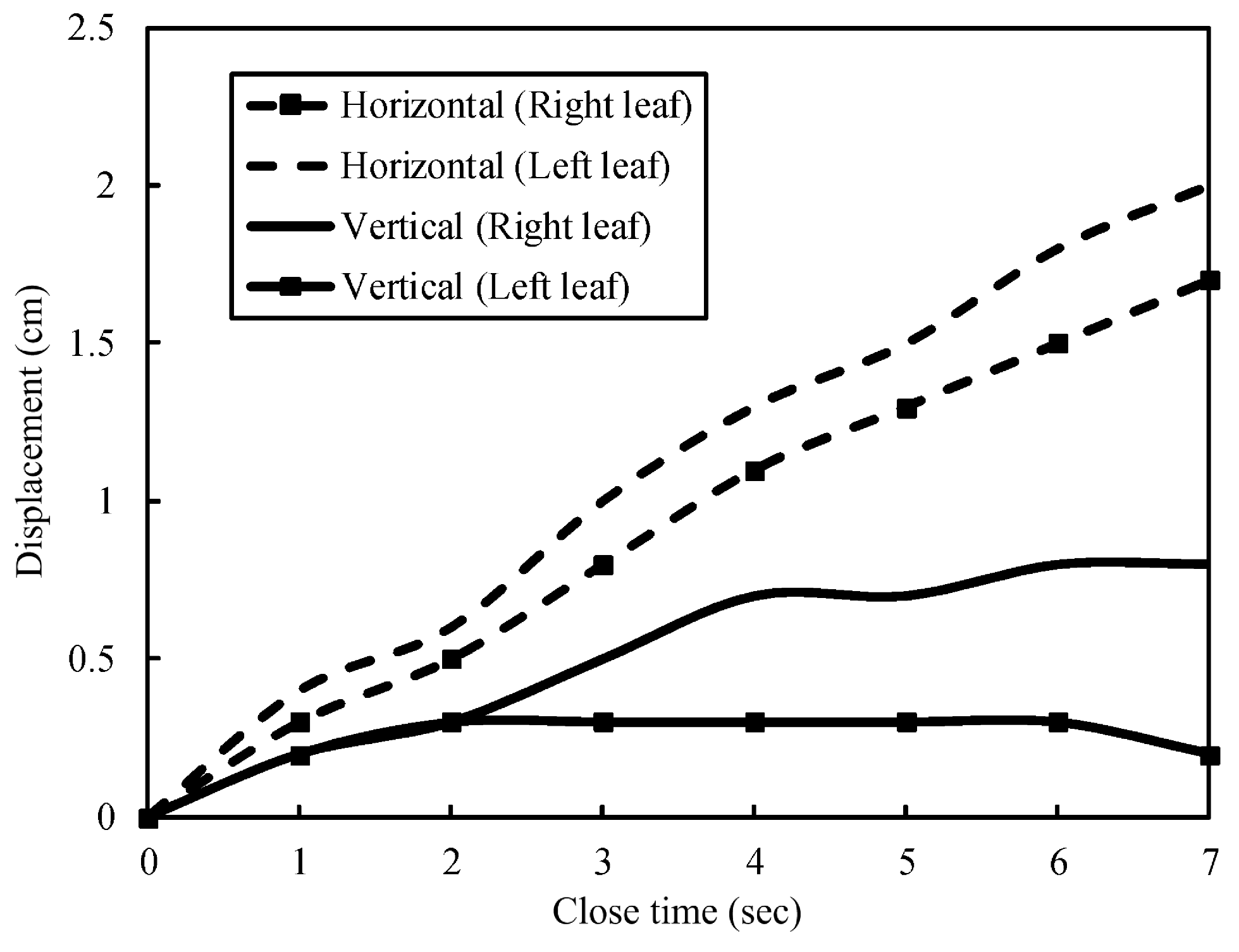
3.2.2. Bionic Mimosa Situational Behavior Swinging
3.3. Discussion
3.3.1. Leaf Delicacy Process
3.3.2. Fuzzy Control Performance
3.3.3. Strain Swing Behaviors
4. Conclusions
Acknowledgments
Author Contributions
Conflict of Interests
References
- Steele, J.E. How do we get there. In Bionics Symposium: Living Prototypes—The Key to New Technology; Gray, C.H., Ed.; Routledge: New York, NY, USA, 1995; pp. 55–60. [Google Scholar]
- Abbott, J.; Nagy, Z.; Beyeler, F.; Nelson, B. Robotics in the small. IEEE Robot. Autom. Mag. 2007, 14, 92–103. [Google Scholar] [CrossRef]
- Firebaugh, S.; Piepmeier, J.; Leckie, E.; Burkhardt, J. Jitterbot: A mobile millirobot using vibration actuation. Micromachines 2011, 2, 295–305. [Google Scholar] [CrossRef]
- Bar-Cohen, Y. Electroactive Polymer (EAP) Actuators as Artificial Muscles: Reality, Potential, and Challenges, 2nd ed.; SPIE Press: Washington, DC, USA, 2004. [Google Scholar]
- Nishida, G.; Sugiura, M.; Yamakita, M.; Maschke, B.; Ikeura, R. Multi-input multi-output integrated ionic polymer-metal composite for energy controls. Micromachines 2012, 3, 126–136. [Google Scholar] [CrossRef]
- Callister, W.D., Jr. Materials Science and Engineering: An Introduction, 8th ed.; John Wiley and Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Son, H.M.; Lee, Y.J. New variable focal liquid lens system using antagonistic-type SMA actuator. In Proceedings of the 4th International Conference on Autonomous Robot and Agents, Wellinfton, New Zealand, 10–12 February 2009.
- Makishi, W.; Matunaga, T.; Haga, Y.; Esashi, M. Active bending electric endoscope using shape memory alloy coil actuator. In Proceedings of the First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 20–22 February 2006; pp. 217–219.
- Lee, Y.P.; Kim, B.; Lee, M.G.; Park, J.O. Locomotive mechanism design and fabrication of biomimetic micro robot using shape memory alloy. In Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, Korea, 26 April–1 May 2004.
- Liu, C.Y.; Liao, W.H. A snake robot using shape memory alloys. In Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, China, 22–26 August 2004.
- Zhang, Y.; Li, S.; Ma, J.; Yang, J. Development of an Underwater Oscillatory Propulsion System Using Shape Memory Alloy. In Proceedings of the IEEE International Conference on Mechatronics & Automation, Niagara Falls, NY, USA, 29 July–1 August 2005; pp. 1878–1883.
- Liu, Y.L.; Chung, A.; Hu, J.; Lv, J. Shape memory behavior of SMPU knitted fabric. J. Zhejiang Univ. Sci. A 2007, 8, 830–834. [Google Scholar] [CrossRef]
- Mingallon, M.; Ramaswamy, S. Bio-inspired self-actuating composite materials. In Composites and Their Applications; Ning, H., Ed.; InTech: Rijeka, Croatia, 2012. [Google Scholar]
- Huang, H.L.; Park, S.H.; Park, J.O.; Yun, C.H. Development of Stem Structure for Flower Robot using SMA Actuators. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Sanya, China, 15–18 December 2007; pp. 1580–1585.
- Chang, C.L.; Sie, M.F.; Shie, J.L. Development of a multisensor-based bio-botanic robot and its implementation using a self-designed embedded board. Sensors 2011, 11, 11629–11648. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.C. Fuzzy logic in control system: Fuzzy logic controller. I. IEEE Trans. Syst. Man Cybern. 1990, 20, 404–418. [Google Scholar] [CrossRef]
- Lee, C.C. Fuzzy logic in control system: Fuzzy logic controller. II. IEEE Trans. Syst. Man Cybern. 1990, 20, 419–435. [Google Scholar] [CrossRef]
- Otsuka, K.; Wayman, C.M. Shape Memory Materials; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Chang, C.L.; Shie, J.L. Design and implementation of actuator for the swing mechanism of interactive bio-mimosa robot. J. Chin. Soc. Mech. Eng. 2013, 34, 137–142. [Google Scholar]
- Lotters, J.C.; Olthuis, W.; Veltink, P.H.; Bergveld, P. The mechanical properties of the rubber elastic polymer polydimethylsiloxane for sensor applications. J. Micromech. Microeng. 1997, 7, 145–147. [Google Scholar] [CrossRef]
- McDonald, J.C.; Duffy, D.C.; Anderson, J.R.; Chiu, D.T.; Wu, H.; Schueller, O.J.A.; Whitesides, G.M. Fabrication of microfluidic devices using poly(dimethylsiloxane). Electrophoresis 2000, 21, 27–40. [Google Scholar] [CrossRef] [PubMed]
- Parallax Inc. BASIC Stamp. Available online: http://www.parallax.com/microcontrollers/basic-stamp (access on 5 June 2014).
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, C.-L.; Shie, J.-L. Design and Implementation of a Bionic Mimosa Robot with Delicate Leaf Swing Behavior. Micromachines 2015, 6, 42-62. https://doi.org/10.3390/mi6010042
Chang C-L, Shie J-L. Design and Implementation of a Bionic Mimosa Robot with Delicate Leaf Swing Behavior. Micromachines. 2015; 6(1):42-62. https://doi.org/10.3390/mi6010042
Chicago/Turabian StyleChang, Chung-Liang, and Jin-Long Shie. 2015. "Design and Implementation of a Bionic Mimosa Robot with Delicate Leaf Swing Behavior" Micromachines 6, no. 1: 42-62. https://doi.org/10.3390/mi6010042
APA StyleChang, C.-L., & Shie, J.-L. (2015). Design and Implementation of a Bionic Mimosa Robot with Delicate Leaf Swing Behavior. Micromachines, 6(1), 42-62. https://doi.org/10.3390/mi6010042