
Constant High-Voltage Triboelectric Nanogenerator with Stable AC for Sustainable Energy Harvesting

 ,
,  ,
,  , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
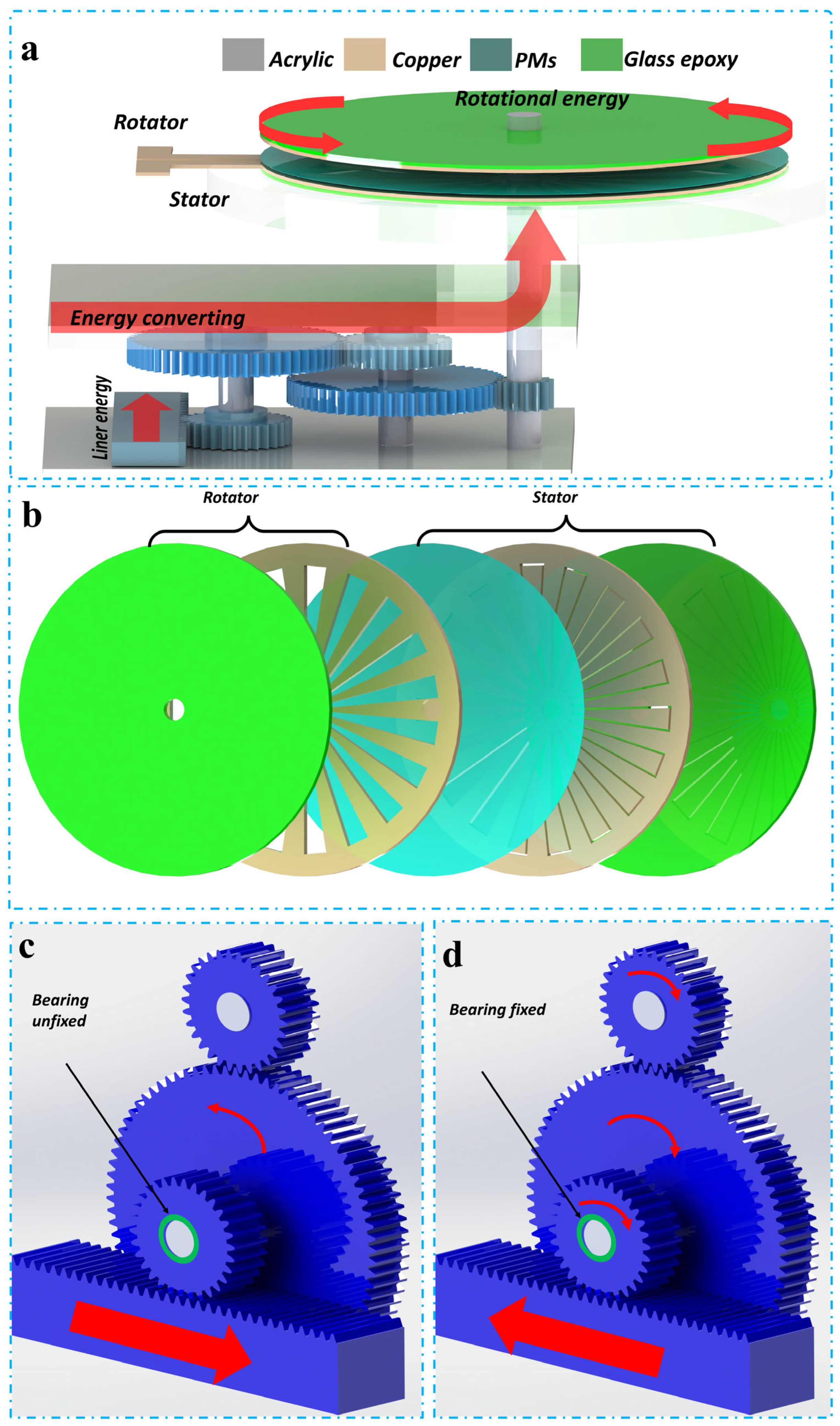
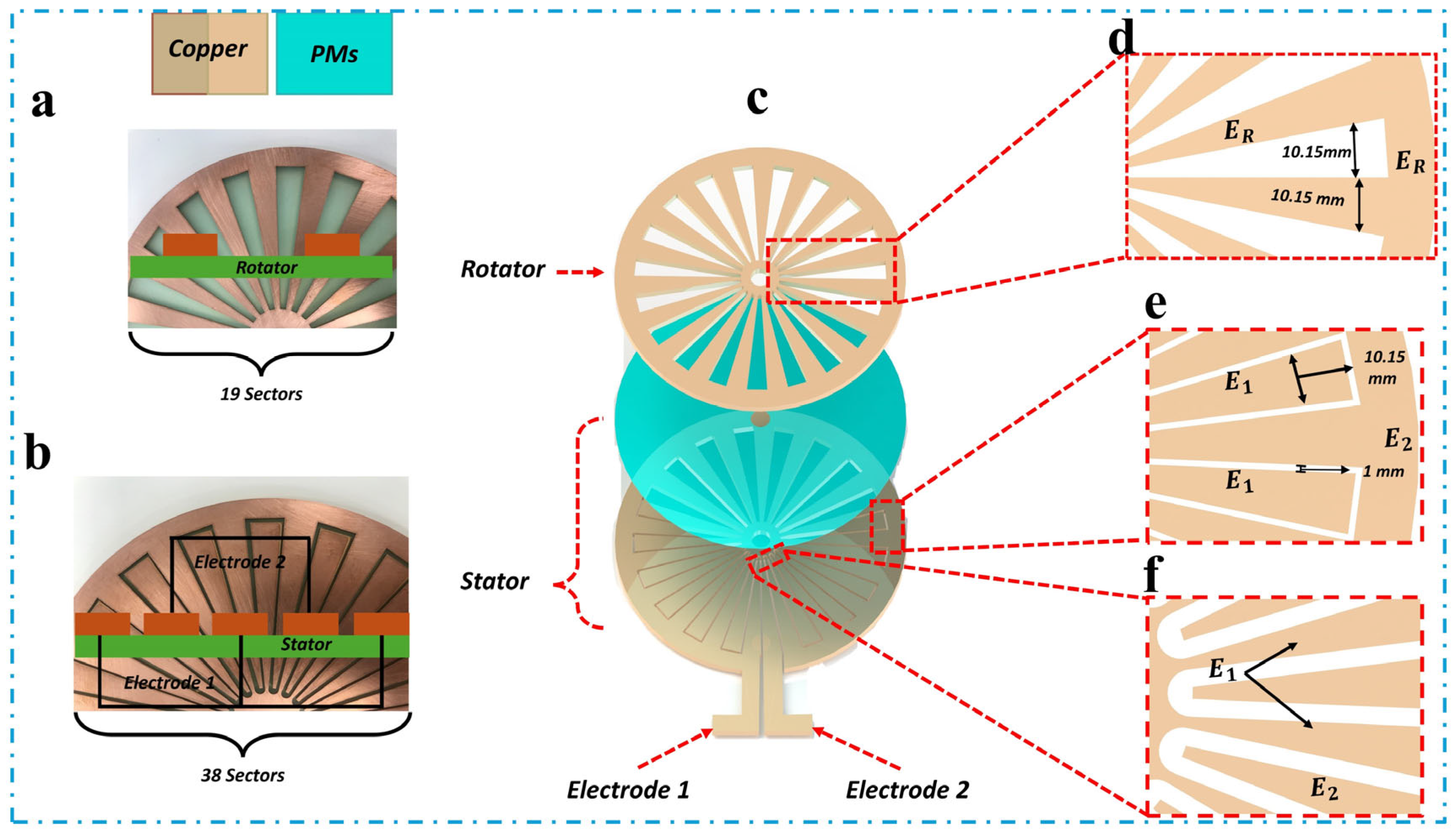
2.1. Design and Fabrication of the Triboelectric Nanogenerator (Rotator and Stator)
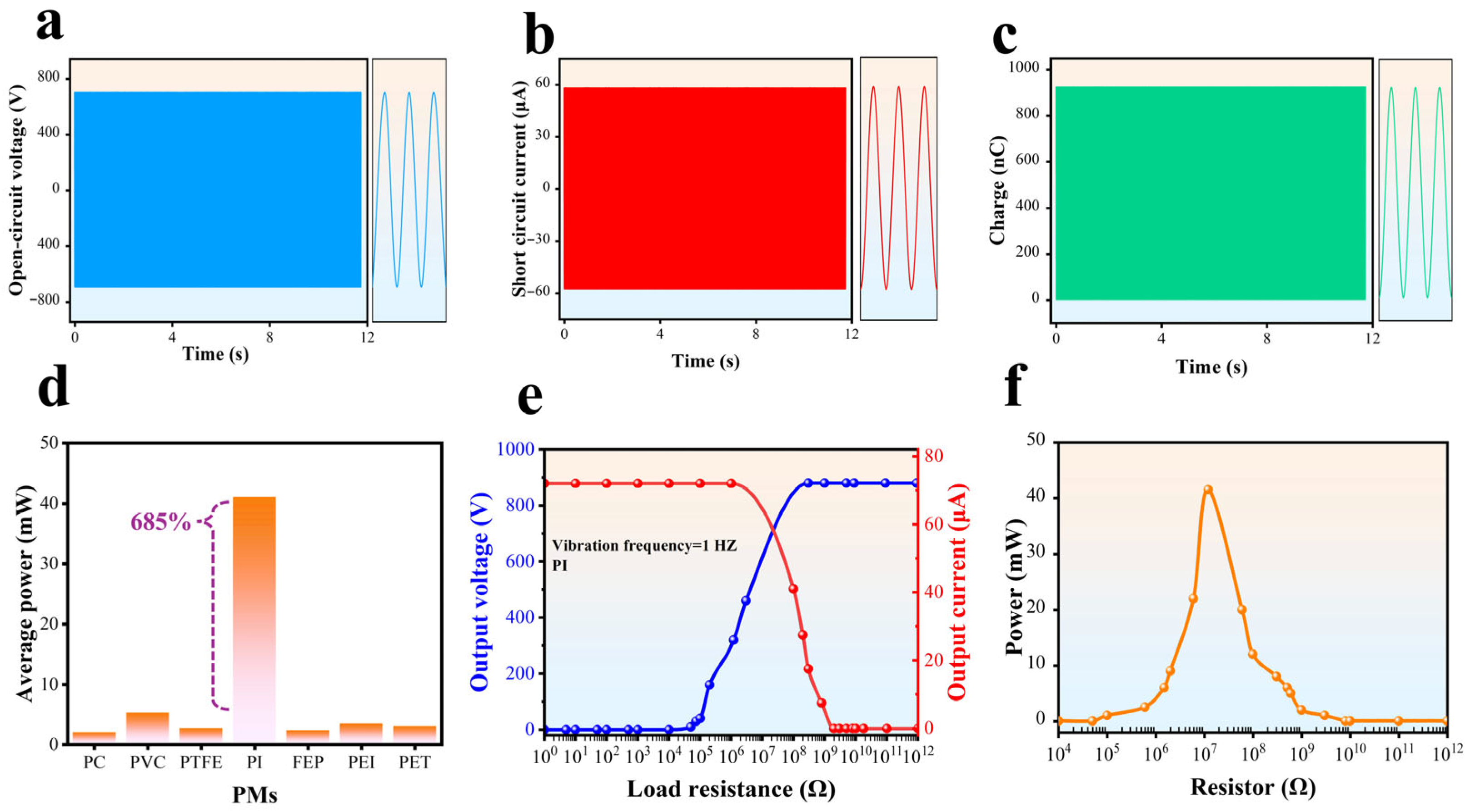
2.2. Materials Selection
2.3. Gear System and Power Transmission
3. Result and Discussion
3.1. Device and Structural Design
3.2. The Development and Evaluation of SHLR-TENG: Mechanisms for Output Optimization and Energy Conversion
3.3. Electricity-Generating Process
3.3.1. SHLR-TENG’s Output Performance Under a Resistance Load
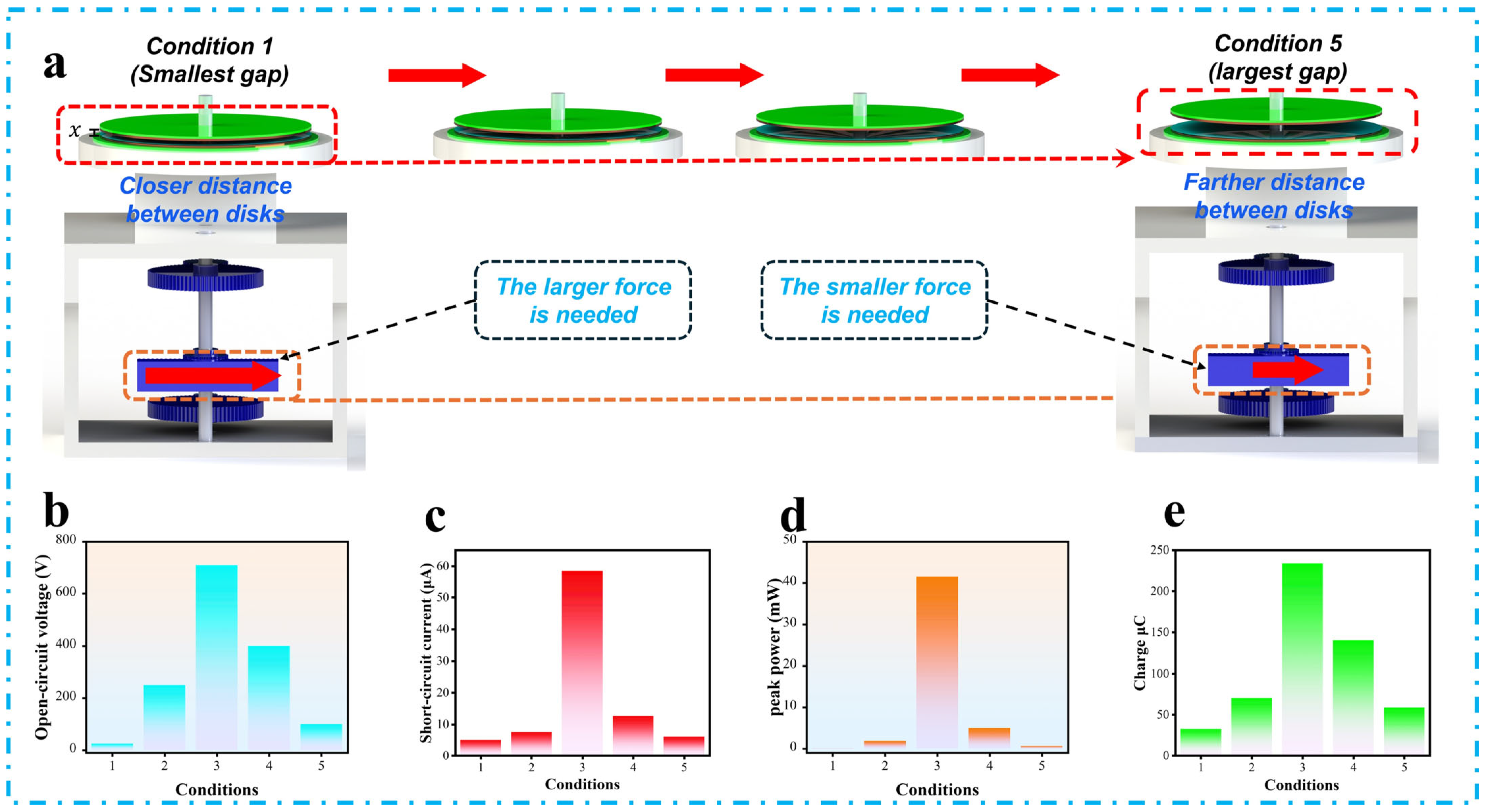
3.3.2. Output Performance of SHLR-TENG as a Function of Gap Distance Between Stator and Rotor
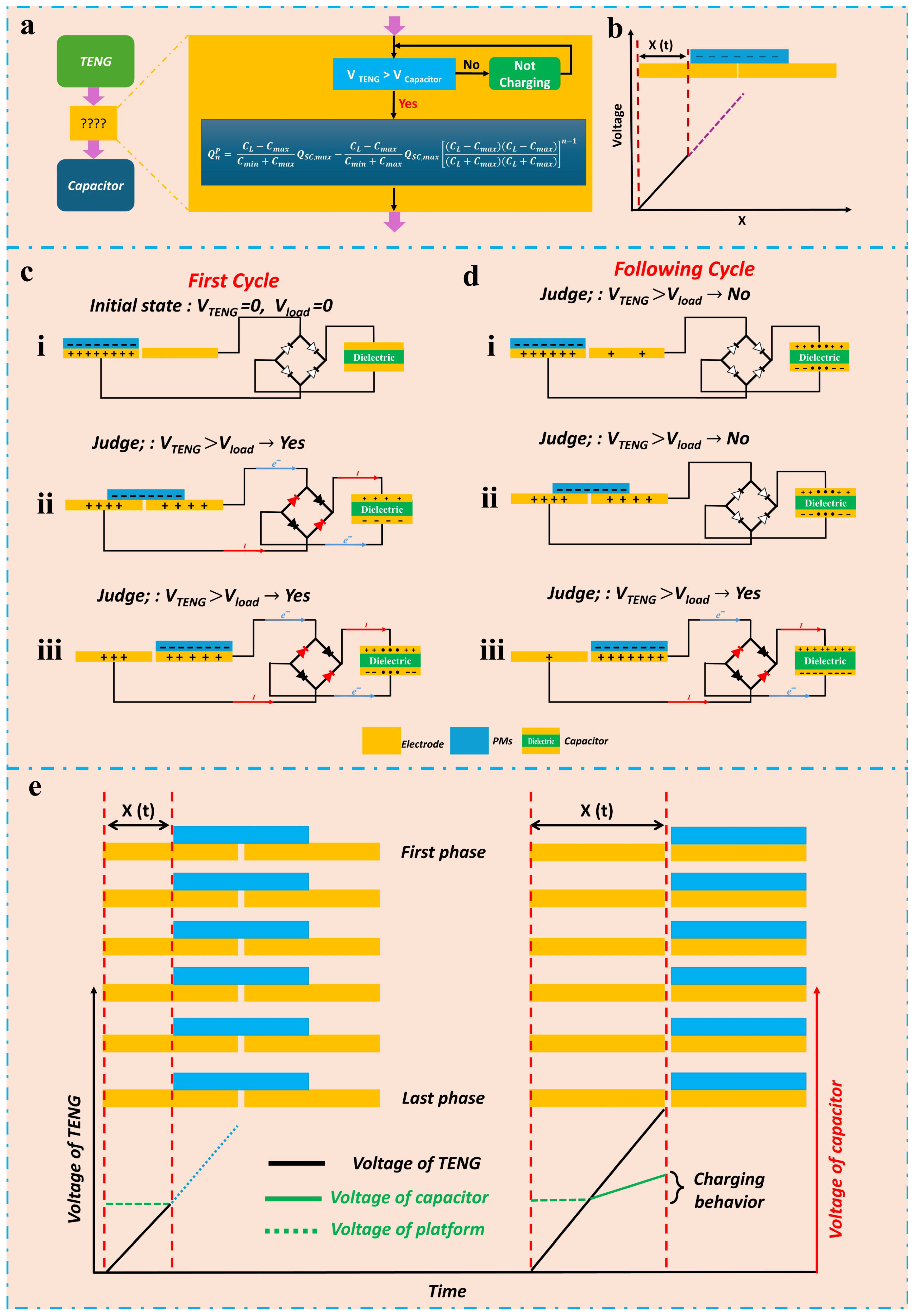
3.3.3. SHLR-TENG’s Output Performance Under a Capacitance Load
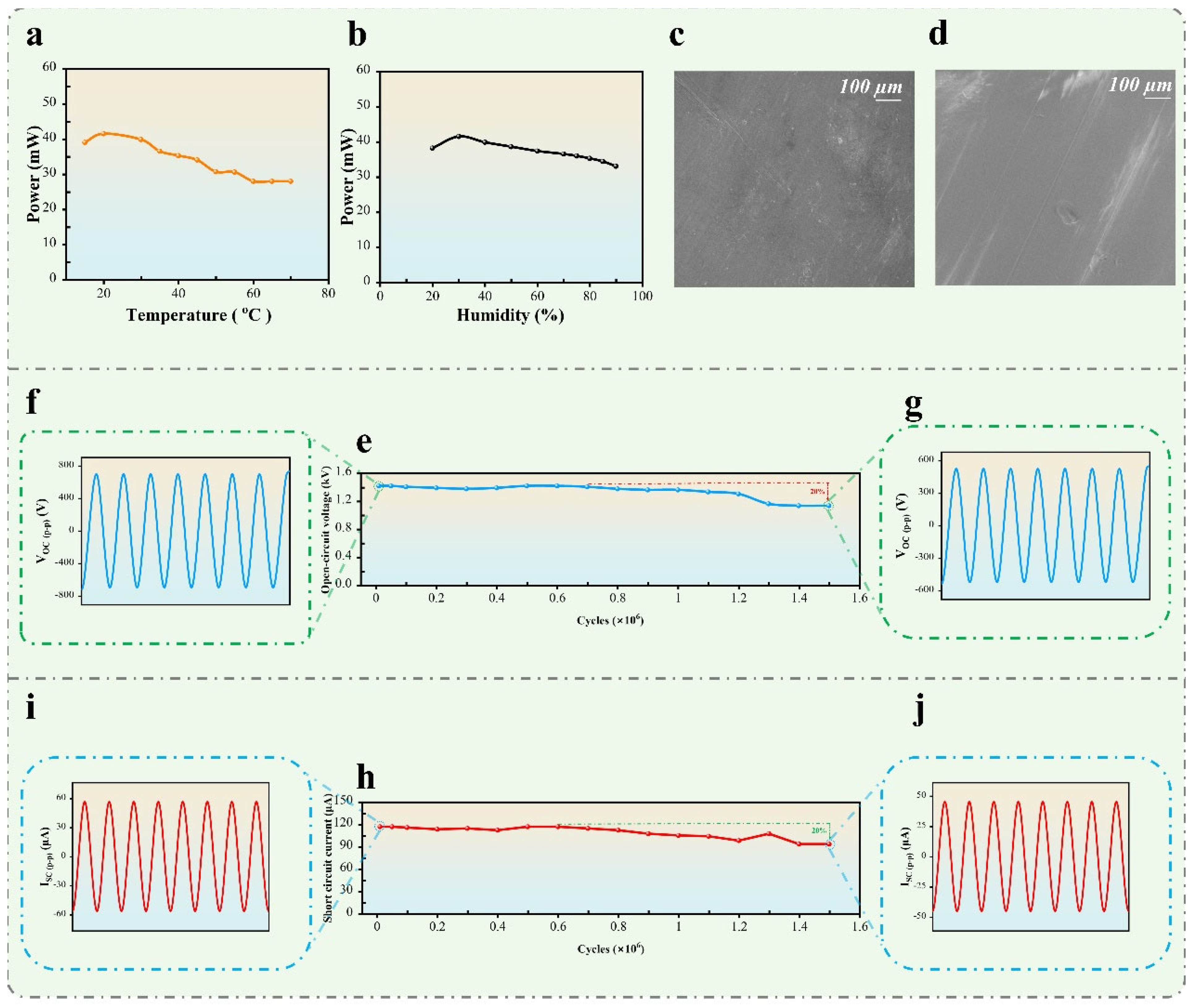
3.4. Durability and Reliability of SHLR-TENG Under Environmental Conditions
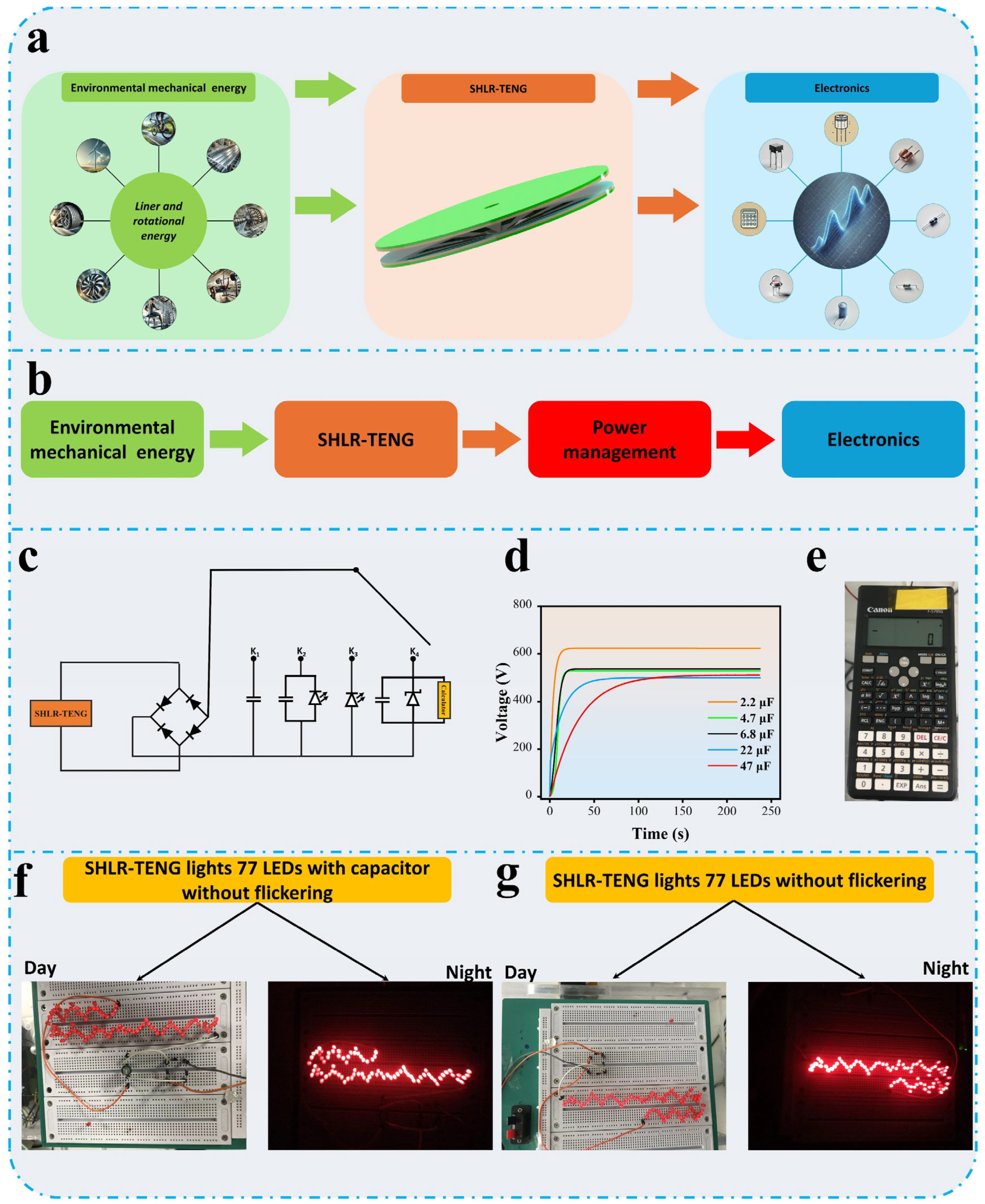
3.5. Demonstrations of SHLR-TENG Applications
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ma, H.; Ding, J.; Zhang, Z.; Gao, Q.; Liu, Q.; Wang, G.; Zhang, W.; Fan, X. Recent Advances in Graphene-Based Humidity Sensors With the Focus on Structural Design: A Review. IEEE Sens. J. 2024, 24, 20289–20311. [Google Scholar] [CrossRef]
- Sun, Y.; Yu, Y.; Gao, Q.; Zhang, X.; Zhang, J.; Wang, Y.; He, S.; Li, H.; Wang, Z.L.; Cheng, T. Enhancing performance of triboelectric nanogenerator by accelerating the charge transfer strategy. Nano Energy 2024, 121, 109194. [Google Scholar] [CrossRef]
- Liang, L.; Wang, X.; Li, M.; Wang, Z.; Jiang, M.; Wu, Y.; Zheng, H. Self-powered active vibration sensor by peak–valley data processing independent of the environment toward structural health monitoring. Nano Energy 2023, 117, 108935. [Google Scholar] [CrossRef]
- Cao, X.; Wei, X.; Huo, X.; Wang, B.; Hu, Y.; Wang, Z.L.; Wu, Z. Self-powered retractable reel sensor for crack monitoring and warning in civil infrastructures. Chem. Eng. J. 2023, 478, 147238. [Google Scholar] [CrossRef]
- Zhang, M.; Xu, T.; Liu, K.; Zhu, L.; Miao, C.; Chen, T.; Gao, M.; Wang, J.; Si, C. Modulation and Mechanisms of Cellulose-Based Hydrogels for Flexible Sensors. SusMat 2025, 5, e255. [Google Scholar] [CrossRef]
- Seo, B.; Choi, Y.; Noh, D.; Kim, J.; Chen, X.; Choi, W. Triangular electrode arrangement for minimizing electrode density and footprint in tactile sensors and flexible electronics. Device 2025, 3, 100602. [Google Scholar] [CrossRef]
- Du, T.; Chen, Z.; Dong, F.; Cai, H.; Zou, Y.; Zhang, Y.; Sun, P.; Xu, M. Advances in green triboelectric nanogenerators. Adv. Funct. Mater. 2024, 34, 2313794. [Google Scholar] [CrossRef]
- Tan, D.; Zhou, J.; Wang, K.; Zhang, C.; Li, Z.; Xu, D. Wearable bistable triboelectric nanogenerator for harvesting torsional vibration energy from human motion. Nano Energy 2023, 109, 108315. [Google Scholar] [CrossRef]
- Jing, Z.; Zhang, J.; Wang, J.; Zhu, M.; Wang, X.; Cheng, T.; Zhu, J.; Wang, Z.L. 3D fully-enclosed triboelectric nanogenerator with bionic fish-like structure for harvesting hydrokinetic energy. Nano Res. 2022, 15, 5098–5104. [Google Scholar] [CrossRef]
- Shateri, A.A.A.; Zhuo, F.; Shuaibu, N.S.; Wan, R.; Xu, L.; Hazarika, D.; Gyawali, B.; Wang, X. Generating a Full Cycle of Alternative Current Using a Triboelectric Nanogenerator for Energy Harvesting. Micromachines 2025, 16, 11. [Google Scholar] [CrossRef]
- Wang, H.; Fan, Z.; Zhao, T.; Dong, J.; Wang, S.; Wang, Y.; Xiao, X.; Liu, C.; Pan, X.; Zhao, Y. Sandwich-like triboelectric nanogenerators integrated self-powered buoy for navigation safety. Nano Energy 2021, 84, 105920. [Google Scholar] [CrossRef]
- Yuan, Z.; Wang, C.; Xi, J.; Han, X.; Li, J.; Han, S.-T.; Gao, W.; Pan, C. Spherical triboelectric nanogenerator with dense point contacts for harvesting multidirectional water wave and vibration energy. ACS Energy Lett. 2021, 6, 2809–2816. [Google Scholar] [CrossRef]
- Santos, J.F.; del Rocío Silva-Calpa, L.; de Souza, F.G.; Pal, K. Central Countries’ and Brazil’s Contributions to Nanotechnology. Curr. Nanomater. 2024, 9, 109–147. [Google Scholar] [CrossRef]
- Alves, T.; Rodrigues, C.; Callaty, C.; Duarte, C.; Ventura, J. Airflow-Driven Triboelectric-Electromagnetic Hybridized Nanogenerator for Biomechanical Energy Harvesting. Adv. Mater. Technol. 2023, 8, 2300689. [Google Scholar] [CrossRef]
- Fan, F.-R.; Tian, Z.-Q.; Wang, Z.L. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Shanbedi, M.; Ardebili, H.; Karim, A. Polymer-based triboelectric nanogenerators: Materials, characterization, and applications. Prog. Polym. Sci. 2023, 144, 101723. [Google Scholar] [CrossRef]
- Liu, L.; Guo, X.; Liu, W.; Lee, C. Recent progress in the energy harvesting technology—From self-powered sensors to self-sustained IoT, and new applications. Nanomaterials 2021, 11, 2975. [Google Scholar] [CrossRef]
- Ahmad, A.; Kurniawan, S.B.; Ahmad, J.; Alias, J.; Marsidi, N.; Said, N.S.M.; Yusof, A.S.M.; Buhari, J.; Ramli, N.N.; Rahim, N.F.M. Dosage-based application versus ratio-based approach for metal-and plant-based coagulants in wastewater treatment: Merits, limitations, and applicability. J. Clean. Prod. 2022, 334, 130245. [Google Scholar] [CrossRef]
- Wu, S.; Yang, J.; Wang, Y.; Liu, B.; Xiong, Y.; Jiao, H.; Liu, Y.; Bao, R.; Wang, Z.L.; Sun, Q. UFO-Shaped Integrated Triboelectric Nanogenerator for Water Wave Energy Harvesting. Adv. Sustain. Syst. 2023, 7, 2300135. [Google Scholar] [CrossRef]
- Yong, S.; Wang, J.; Yang, L.; Wang, H.; Luo, H.; Liao, R.; Wang, Z.L. Auto-switching self-powered system for efficient broad-band wind energy harvesting based on dual-rotation shaft triboelectric nanogenerator. Adv. Energy Mater. 2021, 11, 2101194. [Google Scholar] [CrossRef]
- Zhou, H.; Liu, F.; Chen, J.; Wang, J.; Wu, Y.; Chen, J.; Chang, S.; Xia, L.; Zhang, C.; Jiang, J.; et al. Computer aided design automation for triboelectric nanogenerators. Nano Energy 2023, 118, 108963. [Google Scholar] [CrossRef]
- Fu, S.; He, W.; Wu, H.; Shan, C.; Du, Y.; Li, G.; Wang, P.; Guo, H.; Chen, J.; Hu, C. High output performance and ultra-durable DC output for triboelectric nanogenerator inspired by primary cell. Nano-Micro Lett. 2022, 14, 155. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L. On Maxwell’s displacement current for energy and sensors: The origin of nanogenerators. Mater. Today 2017, 20, 74–82. [Google Scholar] [CrossRef]
- Dale, J.J.; Smith, M.W.; Hasell, T. Water Soluble, Ionically Generated Thiopolymers. Adv. Funct. Mater. 2024, 34, 2314567. [Google Scholar] [CrossRef]
- An, Z.; Wu, Z.; Hu, Y.; Han, C.; Cao, Z.; Zhou, H.; Chen, Y. A miniaturized array microneedle tactile sensor for intelligent object recognition. Nano Energy 2024, 125, 109567. [Google Scholar] [CrossRef]
- Wajahat, M.; Kouzani, A.Z.; Khoo, S.Y.; Mahmud, M.A.P. A review on extrusion-based 3D-printed nanogenerators for energy harvesting. J. Mater. Sci. 2022, 57, 140–169. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Gao, Y.; Zhao, Z.; Hu, Y.; Yang, O.; Liu, L.; Zhou, L.; Wang, J.; Wang, Z.L. A highly efficient constant-voltage triboelectric nanogenerator. Energy Environ. Sci. 2022, 15, 1334–1345. [Google Scholar] [CrossRef]
- Niu, S.; Liu, Y.; Wang, S.; Lin, L.; Zhou, Y.S.; Hu, Y.; Wang, Z.L. Theory of sliding-mode triboelectric nanogenerators. Adv. Mater. 2013, 25, 6184–6193. [Google Scholar] [CrossRef]
- Wang, Z.L.; Lin, L.; Chen, J.; Niu, S.; Zi, Y. Triboelectric nanogenerator: Freestanding triboelectric-layer mode. In Triboelectric Nanogenerators; Springer: Cham, Switzerland, 2016; pp. 109–153. [Google Scholar] [CrossRef]
- Chen, B.; Yang, Y.; Wang, Z.L. Scavenging Wind Energy by Triboelectric Nanogenerators. Adv. Energy Mater. 2018, 8, 1702649. [Google Scholar] [CrossRef]
- Niu, S.; Wang, Z.L. Theoretical systems of triboelectric nanogenerators. Nano Energy 2015, 14, 161–192. [Google Scholar] [CrossRef]
- Zou, H.; Zhang, Y.; Guo, L.; Wang, P.; He, X.; Dai, G.; Zheng, H.; Chen, C.; Wang, A.C.; Xu, C.; et al. Quantifying the triboelectric series. Nat. Commun. 2019, 10, 1427. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.; Wang, A.C.; Ding, W.; Guo, H.; Wang, Z.L. Triboelectric Nanogenerator: A Foundation of the Energy for the New Era. Adv. Energy Mater. 2018, 9, 1802906. [Google Scholar] [CrossRef]
- Zhu, G.; Chen, J.; Zhang, T.; Jing, Q.; Wang, Z.L. Radial-arrayed rotary electrification for high performance triboelectric generator. Nat. Commun. 2014, 5, 3426. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Jiang, T.; Liu, G.; Feng, Y.; Zhang, C.; Wang, Z.L. Spherical triboelectric nanogenerator integrated with power management module for harvesting multidirectional water wave energy. Energy Environ. Sci. 2020, 13, 277–285. [Google Scholar] [CrossRef]
- Wang, J.; Wu, H.; Fu, S.; Li, G.; Shan, C.; He, W.; Hu, C. Enhancement of output charge density of TENG in high humidity by water molecules induced self-polarization effect on dielectric polymers. Nano Energy 2022, 104, 107916. [Google Scholar] [CrossRef]
- Seung, W.; Gupta, M.K.; Lee, K.Y.; Shin, K.-S.; Lee, J.-H.; Kim, T.Y.; Kim, S.; Lin, J.; Kim, J.H.; Kim, S.-W. Nanopatterned textile-based wearable triboelectric nanogenerator. ACS Nano 2015, 9, 3501–3509. [Google Scholar] [CrossRef]
- Liu, J.; Luo, H.; Yang, T.; Cui, Y.; Lu, K.; Qin, W. Double bistable superposition strategy for improving the performance of triboelectric nanogenerator. Mech. Syst. Signal Process. 2024, 212, 111304. [Google Scholar] [CrossRef]
- Yang, T.; Xie, J.; Huang, Z.; Liu, J.; Luo, H.; Jing, X. Bio-inspired vibration isolator with triboelectric nanogenerator for self-powered monitoring. Mech. Syst. Signal Process. 2025, 223, 111854. [Google Scholar] [CrossRef]
- Cui, Y.; Yang, T.; Luo, H.; Li, Z.; Jing, X. Jellyfish-inspired bistable piezoelectric-triboelectric hybrid generator for low-frequency vibration energy harvesting. Int. J. Mech. Sci. 2024, 279, 109523. [Google Scholar] [CrossRef]
- Tian, Z.; Li, J.; Liu, L.; Wu, H.; Hu, X.; Xie, M.; Zhu, Y.; Chen, X.; Ou-Yang, W. Machine learning-assisted self-powered intelligent sensing systems based on triboelectricity. Nano Energy 2023, 113, 108559. [Google Scholar] [CrossRef]
- Yang, D.; Shang, Y.; Li, Z.; Wang, K. Triboelectric nanogenerator assisted by machine learning. ACS Appl. Electron. Mater. 2023, 5, 6549–6570. [Google Scholar] [CrossRef]
- Zhang, R. Machine learning-assisted triboelectric nanogenerator-based self-powered sensors. Cell Rep. Phys. Sci. 2024, 5, 101888. [Google Scholar] [CrossRef]
- Cao, Y.; Dhahad, H.A.; Alsharif, S.; El-Shorbagy, M.; Sharma, K.; Anqi, A.E.; Rashidi, S.; Shamseldin, M.A.; Shafay, A.S. Predication of the sensitivity of a novel daily triple-periodic solar-based electricity/hydrogen cogeneration system with storage units: Dual parametric analysis and NSGA-II optimization. Renew. Energy 2022, 192, 340–360. [Google Scholar] [CrossRef]
- Ye, Z.; Liu, T.; Du, G.; Shao, Y.; Wei, Z.; Zhang, S.; Chi, M.; Wang, J.; Wang, S.; Nie, S. Bioinspired Superhydrophobic Triboelectric Materials for Energy Harvesting. Adv. Funct. Mater. 2025, 35, 2412545. [Google Scholar] [CrossRef]
- Zhang, C.; Hao, Y.; Yang, J.; Su, W.; Zhang, H.; Wang, J.; Wang, Z.L.; Li, X. Recent advances in triboelectric nanogenerators for marine exploitation. Adv. Energy Mater. 2023, 13, 2300387. [Google Scholar] [CrossRef]
- Hu, Y.; Zhou, J.; Li, J.; Ma, J.; Hu, Y.; Lu, F.; He, X.; Wen, J.; Cheng, T. Tipping-bucket self-powered rain gauge based on triboelectric nanogenerators for rainfall measurement. Nano Energy 2022, 98, 107234. [Google Scholar] [CrossRef]
- Xiao, K.; Wang, W.; Wang, K.; Zhang, H.; Dong, S.; Li, J. Improving triboelectric nanogenerators performance via interface tribological optimization: A review. Adv. Funct. Mater. 2024, 34, 2404744. [Google Scholar] [CrossRef]
- Liu, X.; Hall, S.R.; Wang, Z.; Huang, H.; Ghanta, S.; Di Sante, M.; Leri, A.; Anversa, P.; Perrella, M.A. Rescue of neonatal cardiac dysfunction in mice by administration of cardiac progenitor cells in utero. Nat. Commun. 2015, 6, 8825. [Google Scholar] [CrossRef]
- Price, J.S.; Grede, A.J.; Wang, B.; Lipski, M.V.; Fisher, B.; Lee, K.-T.; He, J.; Brulo, G.S.; Ma, X.; Burroughs, S. High-concentration planar microtracking photovoltaic system exceeding 30% efficiency. Nat. Energy 2017, 2, 17113. [Google Scholar] [CrossRef]
- Zhao, Z.; Dai, Y.; Liu, D.; Zhou, L.; Li, S.; Wang, Z.L.; Wang, J. Rationally patterned electrode of direct-current triboelectric nanogenerators for ultrahigh effective surface charge density. Nat. Commun. 2020, 11, 6186. [Google Scholar] [CrossRef]
- Lin, Z.; Zhang, B.; Zou, H.; Wu, Z.; Guo, H.; Zhang, Y.; Yang, J.; Wang, Z.L. Rationally designed rotation triboelectric nanogenerators with much extended lifetime and durability. Nano Energy 2020, 68, 104378. [Google Scholar] [CrossRef]
- Lei, H.; Chen, Y.; Gao, Z.; Wen, Z.; Sun, X. Advances in self-powered triboelectric pressure sensors. J. Mater. Chem. A 2021, 9, 20100–20130. [Google Scholar] [CrossRef]
- Niu, S.; Liu, Y.; Chen, X.; Wang, S.; Zhou, Y.S.; Lin, L.; Xie, Y.; Wang, Z.L. Theory of freestanding triboelectric-layer-based nanogenerators. Nano Energy 2015, 12, 760–774. [Google Scholar] [CrossRef]
- Li, K.; Shan, C.; Fu, S.; Wu, H.; He, W.; Wang, J.; Li, G.; Mu, Q.; Du, S.; Zhao, Q. High efficiency triboelectric charge capture for high output direct current electricity. Energy Environ. Sci. 2024, 17, 580–590. [Google Scholar] [CrossRef]
- Wang, J.; Li, S.; Yi, F.; Zi, Y.; Lin, J.; Wang, X.; Xu, Y.; Wang, Z.L. Sustainably powering wearable electronics solely by biomechanical energy. Nat. Commun. 2016, 7, 12744. [Google Scholar] [CrossRef]
- Duan, Y.; Xu, H.; Liu, S.; Chen, P.; Wang, X.; Xu, L.; Jiang, T.; Wang, Z.L. Scalable rolling-structured triboelectric nanogenerator with high power density for water wave energy harvesting toward marine environmental monitoring. Nano Res. 2023, 16, 11646–11652. [Google Scholar] [CrossRef]
- Yang, X.; Xu, L.; Lin, P.; Zhong, W.; Bai, Y.; Luo, J.; Chen, J.; Wang, Z.L. Macroscopic self-assembly network of encapsulated high-performance triboelectric nanogenerators for water wave energy harvesting. Nano Energy 2019, 60, 404–412. [Google Scholar] [CrossRef]
- Li, X.; Xu, L.; Lin, P.; Yang, X.; Wang, H.; Qin, H.; Wang, Z.L. Three-dimensional chiral networks of triboelectric nanogenerators inspired by metamaterial’s structure. Energy Environ. Sci. 2023, 16, 3040–3052. [Google Scholar] [CrossRef]
- Xu, M.; Zhao, T.; Wang, C.; Zhang, S.L.; Li, Z.; Pan, X.; Wang, Z.L. High Power Density Tower-like Triboelectric Nanogenerator for Harvesting Arbitrary Directional Water Wave Energy. ACS Nano 2019, 13, 1932–1939. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, C.; Wang, W.; Xu, R.; Chen, P.; Du, T.; Xue, T.; Wang, Z.; Xu, M. A Stackable Triboelectric Nanogenerator for Wave-Driven Marine Buoys. Nanomaterials 2022, 12, 594. [Google Scholar] [CrossRef]
- Wu, H.; Wang, Z.; Zi, Y. Multi-mode water-tube-based triboelectric nanogenerator designed for low-frequency energy harvesting with ultrahigh volumetric charge density. Adv. Energy Mater. 2021, 11, 2100038. [Google Scholar] [CrossRef]
- Wang, H.; Xu, L.; Bai, Y.; Wang, Z.L. Pumping up the charge density of a triboelectric nanogenerator by charge-shuttling. Nat. Commun. 2020, 11, 4203. [Google Scholar] [CrossRef] [PubMed]
- Zhong, W.; Xu, L.; Yang, X.; Tang, W.; Shao, J.; Chen, B.; Wang, Z.L. Open-book-like triboelectric nanogenerators based on low-frequency roll–swing oscillators for wave energy harvesting. Nanoscale 2019, 11, 7199–7208. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Liu, S.; Lin, S.; Yang, H.; Jiang, T.; Wang, Z.L. Liquid–solid triboelectric nanogenerator arrays based on dynamic electric-double-layer for harvesting water wave energy. Adv. Energy Mater. 2023, 13, 2300571. [Google Scholar] [CrossRef]
- Qiu, H.; Wang, H.; Xu, L.; Zheng, M.; Wang, Z.L. Brownian motor inspired monodirectional continuous spinning triboelectric nanogenerators for extracting energy from irregular gentle water waves. Energy Environ. Sci. 2022, 16, 473–483. [Google Scholar] [CrossRef]
- Bai, Y.; Xu, L.; He, C.; Zhu, L.; Yang, X.; Jiang, T.; Nie, J.; Zhong, W.; Wang, Z.L. High-performance triboelectric nanogenerators for self-powered, in-situ and real-time water quality mapping. Nano Energy 2019, 66, 104117. [Google Scholar] [CrossRef]
- Han, J.; Liu, Y.; Feng, Y.; Jiang, T.; Wang, Z.L. Achieving a Large Driving Force on Triboelectric Nanogenerator by Wave-Driven Linkage Mechanism for Harvesting Blue Energy toward Marine Environment Monitoring. Adv. Energy Mater. 2022, 13, 2203219. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shateri, A.A.A.; Fatah, S.K.; Zhuo, F.; Shuaibu, N.S.; Chen, C.; Wan, R.; Wang, X. Constant High-Voltage Triboelectric Nanogenerator with Stable AC for Sustainable Energy Harvesting. Micromachines 2025, 16, 801. https://doi.org/10.3390/mi16070801
Shateri AAA, Fatah SK, Zhuo F, Shuaibu NS, Chen C, Wan R, Wang X. Constant High-Voltage Triboelectric Nanogenerator with Stable AC for Sustainable Energy Harvesting. Micromachines. 2025; 16(7):801. https://doi.org/10.3390/mi16070801
Chicago/Turabian StyleShateri, Aso Ali Abdalmohammed, Salar K. Fatah, Fengling Zhuo, Nazifi Sani Shuaibu, Chuanrui Chen, Rui Wan, and Xiaozhi Wang. 2025. "Constant High-Voltage Triboelectric Nanogenerator with Stable AC for Sustainable Energy Harvesting" Micromachines 16, no. 7: 801. https://doi.org/10.3390/mi16070801
APA StyleShateri, A. A. A., Fatah, S. K., Zhuo, F., Shuaibu, N. S., Chen, C., Wan, R., & Wang, X. (2025). Constant High-Voltage Triboelectric Nanogenerator with Stable AC for Sustainable Energy Harvesting. Micromachines, 16(7), 801. https://doi.org/10.3390/mi16070801